Komutların İşlem Süresi
|
|
|
- Esen Pembe Özek
- 6 yıl önce
- İzleme sayısı:
Transkript
1 Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı çekerken şart sağladığı durumda 2 saat saykılı çeker Hazırlayan: Dr.Bülent ÇOBANOĞLU 1
2 PIC in Bir Komutu İşleme Süresi Örnek 1: a) 10 MHz b) 16MHz c) 4 MHz saat frekansına sahip PIC MCU için bir komutu işleme süresi kaç sn dir. ( Farzedinki frekans ön bölücü değerleri yoktur.) Çözüm: Örnek 2: a) 10 MHz b) 16MHz saat frekansına sahip PIC MCU için bir komutu işleme işleme süresi kaç sn dir. ( Farzedinki frekans ön bölücü değeri 1/64 ) Çözüm: Not: Komutların işlem süresi MPLAB simülatöründe Stopwatch ile izlenebilir. YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
 Hazırlayan: Dr.")
3 KARŞILAŞTIRMA KOMUTLARI İLE TEKRARLI İŞLEMLER (SUBWF, SUBLW KOMUTLARI) Hazırlayan: Dr.Bülent ÇOBANOĞLU 3

4 Aşağıdaki program kaç saat saykılında çalışır? Ve 4MHz lik bir MCU için çalışma süresini hesaplayınız? ;O dan 9 a ARTAN SAYICI LIST P=16F877 #INCLUDE<P16F877.INC> SAYAC EQU 20H ;16F84 İÇİN 0CH OLACAK 1 CLRF PORTB ;PORTB temizlenir 1 BSF STATUS, 5 ;BANK1 e geçilir 1 CLRF TRISB ;PORTB nin tüm uçları çıkış olacaktır 1 BCF STATUS, 5 ;BANK0 a geçilir DON: SON 1 CLRF SAYAC MOVF SAYAC,W MOVWF PORTB INCF SAYAC,F MOVLW.10 SUBWF SAYAC,W BTFSS STATUS,Z GOTO DON GOTO SON END TG= Donguİci*Sayac+DonguDisi= =8*10+5+1=86 saykıl Hazırlayan: Dr.Bülent ÇOBANOĞLU 4
5 Gecikme Programları: 4Mhz, 1 msn lik gecikme YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
6 Gecikme Programları Örnek 2: Tek bir döngü ile yaklaşık 1000 saykıllık bir gecikme sağlayacak programı yazınız. Çözüm: Toplam Gecikme= Döngü dışındakiler + SAYAC* Döngü içindekiler = 1+1+ (249*4) + 2+1=1001 saykıl Tabii 1000 saykıllık gecikme programının ne kadar sürelik bekleme sağlayacağı PIC mikro denetleyicinin çalışma frekansına bağlıdır. 4 MHz lik PIC MCU için toplam gecikme; 1000*1/4µS*4=1000µS=1msn lik bir gecikme sağlayacaktır. BEKLE MOVLW d 249 ;1 saykıl MOVWF SAYAC ;+1 saykıl DON NOP ;+1*249 DECFSZ SAYAC, F ;+1*249 +(1) GOTO DON ;+2*248 RETURN ;+2 TG= * (RETURN)+2(CALL)= 1001 saykıl Hazırlayan: Dr.Bülent ÇOBANOĞLU 6

7 Gecikme Programları: 4Mhz, 100 msn lik gecikme YRD.DOC.Dr.BÜLENT ÇOBANOĞLU

8 ÖRNEK 3: PORTB ye bağlı LEDleri sırası ile LSB- MSB taraflarını yakan programdaki BEKLE alt programı ne kadarlık bir gecikme sağlar? Hazırlayan: Dr.Bülent ÇOBANOĞLU 8
9 İç içe Döngüler ile Yapılan Gecikme Tek bir döngü ile genelde istediğimiz zaman gecikmesini elde edemeyebiliriz. Çünkü bir kaydedici içine yazabileceğimiz en büyük değer ondalık olarak 255 tir. Bu da 255 ten fazla tekrar yaptıramayacağımız anlamına gelir. Bu durumda iç içe döngüler kullanarak bu sayıyı çok çok büyütebiliriz. İç içe döngüler kullandığımızda hem tekrarlanan komut sayısı artacağından döngünün bir adımının harcadığı süre uzayacak, hem de içi içe döngüler sebebiyle iki (veya daha fazla) döngünün çarpımı kadar sayıda tekrar olabilecektir. Örnek 2. İç içe döngülü bir gecikme alt programı ; Bu programda yaklaşık TG= 3*SAYAC1*SAYAC2 TG = 3*255*255 kadardır. MHz lik dahili saat saykılında bu süre yaklaşık 195µS lik bir gecikme sağlar. Hazırlayan: Dr.Bülent ÇOBANOĞLU 9
10 İç içe döngülü gecikme Programı: 4Mhz, 1 Dakikalık gecikme YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
 lojik1 olur.")
11 Zamanlayıcı kullanan Gecikme Programları: TMR0 Modülü ve TMR0 Kesmesi PSA ; 0 ise TMR0 1 ise WDT TOCS; 0 ise dahili komut saykılı 1 ise harici digital sinyal TMR0 blok diyagramı TMR0 kesmesi, TMR0 kaydedicisinin değeri FFh`dan 00h`ye geçtiğinde üretilmektedir. Bu TMR0 taşması sonucunda TOIF bayrağı (INTCON<2>) lojik1 olur. Kesme istenmiyorsa, TOIE bitinin (INTCON<5>) temizlenmesi ile gizlenebilir. Yeni kesme alınabilmesi için (INTCON<5>) TOIF bayrağı, yazılımdan silinmelidir. Hazırlayan: Dr.Bülent ÇOBANOĞLU 11
12 TMR0 Donanımsal Yapısı Timer0 (TMR0) modülü timer/sayaç aşağıdaki özelliklere sahiptir. 8 bitlik dir. Okunabilir ve yazılabilir, 8 bitlik programlanabilir prescaler., Dahili veya harici saat ayarı, FFh` tan 00h`ye taşma üzeri kesme, Dış saatin kenar seçimi, Hazırlayan: Dr.Bülent ÇOBANOĞLU 12

13 Timer 0 ile ilgili Kaydediciler Timer modu; TOCS biti (OPTION<5>) biti lojik 0 atandığında TMR0 kaydedicinin içeriği dahili osilatör frekansı ile artar. Eğer temizlenmesiyle seçilir. Timer modunda Timer0 modülü her bir komut sürecini uzatır. Eğer, Sayaç modu kullanılacaksa TOCS biti (OPTION<5>) lojik 1 olarak atanır ve RA4 girişinden dışarıdan gelen değişim ile TMR0 kaydedici içeriği artar. Bu modda, artım için yükselen ve düşen kenar tetiklemesi TOSE (OPTION<4>) tarafından belirlenmektedir. TOSE bitinin temizlenmesi ile yükselen sınırları seçilmiş olunur. TMR0 kesmesi, TMR0 kaydedicisinin değeri FFh`dan 00h`ye geçtiğinde üretilmektedir. Bu TMR0 taşması sonucunda TOIF bayrağı (INTCON<2>) lojik1 olur. Kesme istenmiyorsa, TOIE bitinin (INTCON<5>) temizlenmesi ile gizlenebilir. Yeni kesme alınabilmesi için (INTCON<5>) TOIF bayrağı, yazılımdan silinmelidir.
14 TMR0 Frekans ÖnBölücü(PreScaler) Ayarları OPTION_REG OPTION_REG Kaydedici bitleri Bit 5 TOCS: TMR0 saat kaynağını seçme biti 0 = Dahili komut çevrim saati kullanılır (CLKOUT) 1 = RA4/TOCK1 pininden (uçundan) gelen darbeler saat kaynağı olurak kullanılır. Bit 4 TOSE: TMR0 kaynak kenarı seçme biti (Eğer TOCS = 1 ise) 0 = RA4/TOCK1 pininden gelen her yükselen kenar için bir artırılır 1 = RA4/TOCK1 pininden gelen her düşen kenar için bir artırılır. Bit 3 PSA: Önbölücü / önölçekleme yapılacak birimi seçme biti 0 = Önbölücü TMR0 modülü için ayrılır 1 = Önbölücü WDT için ayrılır. Bit 2,1,0; PS2, PS1, PS0: Önbölücü oranı seçme bitleri MOVLW b ; TMRO, dahili sinyal kaynağı ve prescaler:111 seç MOVWF OPTION_REG 14

15 TMR0 ile Gecikme TMR0 sayıcısının FF (255) den 00 a geçmesi TMR0 kesmesine sebep olur ve bu kesme sonucunda INTCON kesme kaydedicisinin 2. (T0IF) biti 1 değerini alır. Bu kesmeyi kullanabilmek için daha önce sinde INTCON kaydedicisinin TOIE bitinin 1 yapılarak kesmeye izin verilmesi gerektiği unutulmamalıdır. Kesme gecikmesi (Overflow time)= 4 *TOSC * Prescaler *(256 TMR0 başlangıç değeri) Bu formülden TMR0 başlangıç değeri de çekilebilir. O zaman TMR0 = 256 (Gecikme zamanı)/(4 *TOSC* Prescaler) Hazırlayan: Dr.Bülent ÇOBANOĞLU 15
16 TMR0 Kesme Gecikmesi TMR0 sayıcısı h 00 değeri yerine istenilen bir sayıdan başlatılabilir. Kesme Gecikme Süresi=T komut zamanı (4 *TOSC )*Prescaler değeri*(256-tmr0 başlangıç sayısı) Formülü ile istenilen geçikme süresi hesaplanabilir. Formülde TMR0 başlangıç sayısı ve Prescaler değeri ondalık olarak alınmalıdır. TMR0 ile elde edilebilen en büyük kesme gecikme süresi (PS0-PS2: 111 seçilirse) ve Fosc=4MHz ise ; T komut zamanı =1/(fosc/4)=1µs bulunur. Kesme Gecikme Süresi= T komut zamanı *Prescaler değeri*(256-tmr0 başlangıç sayısı) 1 ms zaman gecikmesi için: = 1µs*256*(256-0) = 65536µs = 65,5 ms olur. Kesme Gecikme Süresi= T komut zamanı *Prescaler değeri*(256-tmr0 başlangıç sayısı) = 1µs*8*( ) = 1000µs = 1 ms olur. Hazırlayan: Dr.Bülent ÇOBANOĞLU 16
 değerinden saymaya başladığı kabulü ile bu PIC kaç saniye sonra TMR0 tarafından bir kesme oluşturur? Çözüm: 4 MHz saat frekansı ise peryot, TOSC =1/fosc =0.")
17 TMR0 Gecikme Alt programı Örnek 7: Osilatör frekansı 4MHz olan bir PIC için, OPTION kaydedicisindeki PS2, PS1, PS0 bitlerinin değerleri sırasıyla b 111 şek lindedir. TMR0 zamanlayıcısının sıfır(0) değerinden saymaya başladığı kabulü ile bu PIC kaç saniye sonra TMR0 tarafından bir kesme oluşturur? Çözüm: 4 MHz saat frekansı ise peryot, TOSC =1/fosc =0.25 µs PS2:PS0 = 111 olduğundan Prescaler= 1:256 Kesme gecikmesi = 4 *TOSC * Prescaler *(256 TMR0 başlangıç değeri) Kesme gecikmesi (Overflow time) = 4 *0.25 µs * 256 *(256 0) = µs =65.536ms MOVLW b ;TMR0, DAHİLİ SİNYAL,1:256 MOVWF OPTION_REG GECIKME CLRF TMR0 DON BTFSS INTCON, TOIF GOTO DON BCF INTCON, TOIF RETURN Hazırlayan: Dr.Bülent ÇOBANOĞLU 17

18 Örnek-8: 4 Bitlik Binary(ikili) Geri Sayıcı(15-0) Uygulaması LIST P=16F877A #INCLUDE<P16F877A.INC> ORG 0X00 GOTO ANA ANA CLRF PORTB ;PORTB temizlenir BSF STATUS, 5 ;BANK1 e geçilir MOVLW b' ' ;TMR0, DAHİLİ SİNYAL,1:256 MOVWF OPTION_REG CLRF TRISB ;PORTB nin tüm uçları çıkış olacaktır BCF STATUS, 5 ;BANK0 a geçilir EnBasa MOVLW d'16' MOVWF PORTB Say CALL BEKLE ;65,53ms CALL BEKLE ;65,53+65,53=131ms lik gecikme DECFSZ PORTB,F ;PORTB-- GOTO Say ;Tekrarla GOTO EnBasa BEKLE: ;gecikme alt programı CLRF TMR0 DON BTFSS INTCON,T0IF GOTO DON BCF INTCON,T0IF RETURN END PORTB ye bağlı ledlerde binary sayım: Hazırlayan: Dr.Bülent ÇOBANOĞLU 18
19 Örnek-9: Timer 0 için harici kesmesini (RA4) kullanarak, 5 kere butona bastığımızda 4 ledin sırasıyla yanmasını sağlayan programın C kodu #include <htc.h> void main(void) { TRISA=0x10; // RA4 giris yapılıyor TRISB=0x00; // PORTB çıkıģ olarak ayarlanıyor PORTA=0x00; // PORTA sıfırlanıyor PORTB=0x00; // PORTB sıfırlanıyor TMR0=-5; // Esasen 250 yüklenmis oluyor //Bit bit tanımlama veya OPTION_REG dogrudan atama T0SE=0; // Düsen kenar tetikleme T0CS=1; // Harici osilatör PSA=1; // Prescaler TMR0 için PS2=0; // 1:2 bölüm değeri PS1=0; PS0=0; T0IF=0; // TMR0 kesme bayrağı temizleniyor T0IE=1; // TMR0 kesmesine izin veriliyor GIE=1; // Genel kesme izni veriliyor for(;;); // sonsuz dongu } static void interrupt isim(void) // Kesme ismi (önemsiz) { char i; // Değiskenler tanımlanıyor if(t0if) // TMR0 kesmesi olusmus mu { i++; // PORTB'de gözükecek değer if(i==16) i=0; PORTB=i; // Değisken değeri PORTB'ye yansıtılıyor TMR0=-5; // Esasen 250 yüklenmis oluyor T0IF=0; // Tekrar dıs kesme alabilmek için kesme bayrağı temizlenir } } Hazırlayan: Dr.Bülent ÇOBANOĞLU 19

20 Örnek-9: Timer 0 için harici kesmesini (RA4) kullanarak, 5 kere butona bastığımızda 4 ledin sırasıyla yanmasını sağlayan programın Assembly dilinde kodlanması Start LOOP LIST P=16F877 #include p16f877.inc N EQU 0X00 ORG 0x0 ; Reset Adresi goto Start ORG 0X04 ; Kesme Adresi goto KESME CLRF PORTB BSF STATUS,5 MOVLW b' ' BSF TRISA,4 MOVWF OPTION_REG CLRF TRISB BCF STATUS,5 CLRF PORTB MOVLW b' ' MOVWF INTCON MOVLW -5 MOVWF TMR0 CLRF N GOTO LOOP KESME END INCF N,F MOVF N,W MOVWF PORTB BCF INTCON,T0IF MOVLW -5 MOVWF TMR0 RETFIE Hazırlayan: Dr.Bülent ÇOBANOĞLU 20
21 TIMER1 Modülü Timer1 modül, zamanlayıcı/sayıcı olmak üzere 2 farklı modda çalıştırılabilir. Timer1 aşağıdaki modlardan birini işletebilir. Zamanlayıcı olarak Senkronize sayıcı/sayacı olarak Asenkronize sayıcı olarak 16 bitlik zamanlayıcı/sayıcı, Okunabilir ve yazılabilir 2 adet 8-bit yazmaca sahip (TMR1H ve TMR1L), 8 bitlik programlanabilir prescaler, Dahili ve harici saat girişi seçimi, FFFFh değerinden 0000h değerine geçilirken kesme oluşur, {16bitlik olması 0 dan e kadar sayım yapabilmesini sağlar.} CCP modülünden reset yapılabilir.
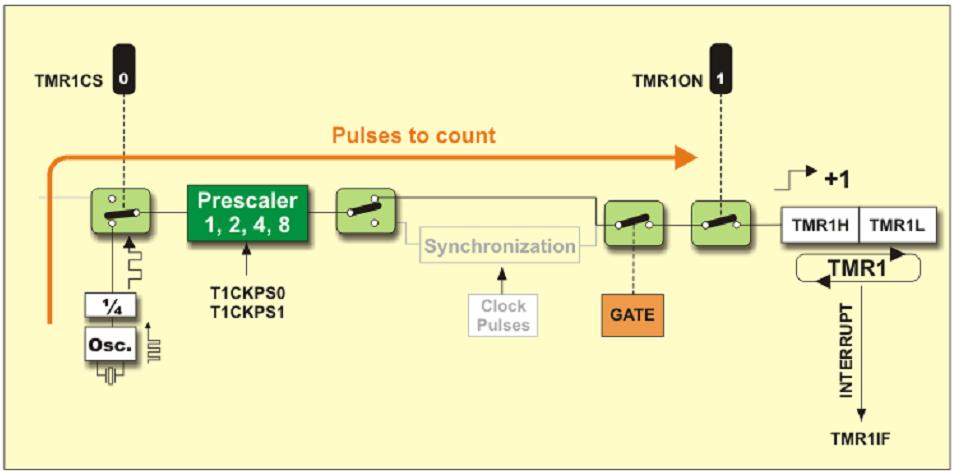
22 TIMER1 Blok diyagramı TMR1CS (T1CON<1>) biti bu modlardan hangisinin çalıştırılacağına karar verir. Zamanlayıcı modunda Timer1 her komut çevrimi artışları, sayaç modunda her harici saat girişi yükselmesini belirler. Timer1 osilatör aktifken RC1/T10SI ve RC0/T10S0/T1CKI pinleri giriş olurlar. TRISC<1:0> değeri ihmal edilir.
 TMR1CS : Saat kaynağı seçme biti (0: Dahili, 1: Harici) T1SYNC : Senkronizasyon biti (1: Senk. Yok, 0: Senk.")
23 TIMER1 Kaydedicileri Timer 1 i kontrol eden kaydediciler ve görevleri şöyledir; T1CKPS1, T1CKPS0 : Prescalar değeridir, (1:1, 1:2, 1:4, 1:8) T1OSCEN : Timer1 osilatör kontrol biti (0: Kapalı, 1: Açık) TMR1CS : Saat kaynağı seçme biti (0: Dahili, 1: Harici) T1SYNC : Senkronizasyon biti (1: Senk. Yok, 0: Senk. Var) TMR1ON : Timer1 açma kapama biti (0: Kapalı, 1: Açık) TMR1H : Timer1 sayıcısının yüksek değerlikli bitini tutan kaydedici TMR1L : Timer1 sayıcısının düşük değerlikli bitini tutan kaydedici TMR1IE : Timer1 kesme izin biti TMR1IF : Timer1 kesme bayrak biti

24 TIMER1 Donanımsal Yapısı
25 TIMER1 ZAMANLAYICI MOD

26 TIMER1 SAYICI MOD

27 T1CON: TIMER1 Kontrol Kaydedicisi TIMER1 deki işlemlerin kontrol edildiği ve işlemler yürütülürken bazı bilgilerin alındığı kaydedicidir. TMR1ON: Timer1 e yetki veren bittir. TMR1ON biti 1 yapıldığında Timer1 kullanılır durumdadır, 0 ise kullanım dışıdır. TMR1CS:Timer 1 için clock kaynağının seçildiği bittir. TMR1CS 1 ise clock kaynağı olarak RC0/T1OSO/T1CKI pininden gelen sinyalin yükselen kenarları seçilir. TMR1CS nin 0 olması halinde ise dahili clock kaynağı kullanılır. T1SYNC:Harici clock kaynağını n senkron kontrolünü yapan bittir. Eğer harici kaynak ile Timer1 e ş zamanlı çalışmıyorsa T1SYNC 1 seviyesinde olur. Eğer eş zamanlı bir çalışma var ise T1SYNC 0 seviyesindedir. T1OSCEN: Timer1 osilatör kaynağı yetkilendirme bitidir. T1OSCEN 1 ise osilatör kaynağı etkindir, 0 ise kullanım dışıdır. 4-5 T1CKPS0,T1CKPS1 :Timer1 giriş sinyalinin bölme (prescaler) oranının seçildiği bitlerdir. Bu bitlerin aldığı değerlere göre bölme prescaler değeri değişmekte ve buna bağlı olarak Timer1 artma frekans ı değişmektedir. 11 = 1:8 Prescaler değeri 10 = 1:4 Prescaler değeri 01 = 1:2 Prescaler değeri 00 = 1:1 Prescaler değeri
28 TIMER1 Zamanlayıcı Kesmesi Algoritması ; Assembly Kesme Fonksiyonu kodu KESME_ALTPROG ; Assembly BCF PIR1,0 ;TMR1IF TASMA BAYRAGINI SIL MOVLW h'0b ;h'obdc' SAYISINI TMR1H VE TMR1L YÜKLE MOVWF TMR1H MOVLW h'dc' ;h'obdc' SAYISINI TMR1H VE TMR1L YÜKLE MOVWF TMR1L RETFIE /Ana Program ayarları oid main() { MR1IF = 0; // PIR1 in TMR1IF kesme bayrağı sıfırlanır MR1H = 0x0B; // TMR1 başlangıç değeri atanır MR1L = 0xDC; MR1CS = 0; // Timer1 dahili osc. Kaynağı seçilir 1CKPS1 = T1CKPS0 = 1; // prescaler oranı 1:8 seçilir MR1IE = 1; //PIE1 in TMR1 kesmesi aktif NTCON = 0xC0; // Kesme izin bitleri (GIE ve PEIE) aktif MR1ON = 1; // TMR1 zamanlayıcısı aktif/hazır... //XC8 Kesme fonksiyonu kodu void interrupt kesme (void) { if (TMR1IF==1) { TMR1IF=0; TMR1L=0xDC; TMR1H=0x0B; //Bu degerler programa göre değişir } }
*/ void main(){ LED=0; TRISD0=0; // RD0 portu çıkış void interrupt kesmetmr1() {")
29 Örnek 10. TMR1 zamanlayıcısını kullanarak 0.5 sn (500 ms) zaman gecikmesi elde eden uygulamanın C kodu #include <xc.h> #define LED RD0 /* TMR1 kesme hizmet fonksiyonu (4 Mhz'lik kristalde 0,5sn aralıklarla bu fonksiyona girilir)*/ void main(){ LED=0; TRISD0=0; // RD0 portu çıkış void interrupt kesmetmr1() { if(tmr1if){ // Kesme geldi mi? TMR1H=3036/256; //0'lanan TMR1 a yeniden 3036 değeri yükle TMR1L=3036%256; // sayma x 8 usn = 0.5 sn LED=~LED; // Çıkış LED'ini tersle TMR1IF = 0; // TMR1 kesme bayrağını sıfırla. } } TMR1ON=1; TMR1CS=0; // TMR1 aktif // Dahili clock (timer) T1CKPS0=1; // Ön Bölücü 11 T1CKPS1=1; // 1:8 (8 usn) TMR1H=3036/256; // =3036 say TMR1L=3036%256; // sayma x 8 usn = 0.5 sn TMR1IF=0; // TMR1 kesme bayrağını resetle TMR1IE=1; // TMR1 kesmesi aktif PEIE=1; // Çevre birim kesmeleri aktif GIE=1; // Global kesme aktif Açıklama: 4MHz, 1µSn dir ve sayım için Timer 1 i e kadar saydıracak olursak; Prescaler oranını 1:8 seçdiğimizde 62500*8= yani 0,5 sn lik gecikme demektir. O zaman bu örnekte TMR1 e başlangıç değeri olarak; =3036 değeri yüklenmelidir. Not: 3036 sayısının hex karşılığı:0x 0BDC de yüklenebilir. while(1); // Kesme bekle }
30 Örnek 10. Aynı programın Assembly kodu LIST P=16F877A #INCLUDE "P16F877A.INC" ORG 0X00 GOTO BASLA ORG 0X04 GOTO KESME_ALTPROG BASLA CLRF PORTD ;PORTD'nin içerigini TEMIZLE BSF STATUS, 5 ;BANK1'e geç CLRF TRISD ;PORTD'nin uçlarini çikis yap BSF PIE1,0 ;TMR1IE (PIE1<0>) (TMR1 interrupt enable bit) BCF STATUS, 5 ;BANK0'a geç KESME_ALTPROG BCF PIR1,0 ;TMR1IF TASMA BAYRAGINI SIL MOVLW 0X0B ;h 0BDC' SAYISINI TMR1H VE TMR1L YÜKLE MOVWF TMR1H MOVLW 0XDC ;h 0BDC' SAYISINI TMR1H VE TMR1L YÜKLE MOVWF TMR1L BTFSS PORTD,0 ; RD0'i TEST ET (1 MI?) GOTO YAK ; HAYIR, RB0=ON RB1=OFF GOTO SONDUR ; EVET, RB0=OFF RB1=ON YAK BSF PORTD,0 ; RD0 ON RETFIE SONDUR BCF PORTD,0 ; RD0 OFF RETFIE END ;Prog. Sonu BSF INTCON,7 ;Tüm kesmelere izin ver (GIE=1) BSF INTCON,6 ;PEIE=1 Çevresel kesmelere izin verildi BCF T1CON,1 ;TMR1CS : Timer1 Clock Source Select bit= 0, dahili BSF T1CON,0 ;Timer1 çalistir (1= Enables Timer1,0=Stops Timer1) BSF T1CON,5 ; T1CON 5.ve 4. bitleri '10' yapilinca frekans BCF T1CON,4 ; bölme orani 1/4 olmaktadir. BCF STATUS, 5 ;BANK0'a geç LOOP GOTO LOOP
31 Zamanlayıcı 2 (TIMER2) Modülü Timer2 modül aşağıdaki özelliklere sahiptir. 8 bit zamanlayıcı (TMR2 kaydedici), 8 bit peryot kaydedici (PR2), Okunabilir ve yazılabilir, Yazılım ile programlanabilir prescaler, TMR2, PR2 eşlemesinde kesme, Saat kaymasını üretmek için TMR2 çıkışının seçimli kullanımı SSP modülü, Timer 2 birimi 16f877a da bir çok görevde kullanılan özel bir Timer dır. Özellikle kullanım amacı PWM üretmek olan Timer 2, Timer 0 gibi 8 bitliktir. TIMER2 Blok diyagramı
 TMR2IE : Timer2 kesme izin biti TMR2IF : Timer2 kesme")
32 T2CON: TIMER2 Kontrol Kaydedicisi TMR2=PR2 : Timer2 sayıcısının yüksek değerlikli bitini tutan kaydedici TOUTPS3, TOUTPS2, TOUTPS1, TOUTPS0 : Postscale değerleri, TMR2ON : Timer2 sayıcısını açma biti T2CKPS1, T2CKPS0 : Prescaler değerler (1:1, 1:4, 1:16) TMR2IE : Timer2 kesme izin biti TMR2IF : Timer2 kesme bayrak biti

33 Zamanlayıcı 2 (TIMER2) İşlemleri Timer2, CCP modülünün PWM modu için PWM zaman tabanı olarak kullanılabilir. Giriş saati (Fosc/4) in prescaler seçeneğine sahip olur. Aşağıdaki durumlardan herhangi biri gerçekleştiğinde prescaler ve postscaler sayaçları temizlenirler. TMR2 kaydedicisine yazıldığında, T2CON kaydedicisine yazıldığında, Herhangi bir aygıt hazır olduğunda, ***T2CON yazıldığında, TMR2 temizlenemez. T2CKPS0,T2CKPS1: Timer2 de prescaler in ayarlandığı bitlerdir. Bu bitlerin aldığı değerlere göre prescaler değeri değişmektedir BİTLER: POSTSCALE DEĞERİ
34 Zamanlayıcı 2 (TIMER2) Kesme Gecikmesi TMR2IF_PER = (PR2+1) * PRE * POST * TOSC * 4 Soru: Fazedelim ki FOSC = 30 MHz, ve her 5 ms de bir Timer2 periyodik kesmesi üretmek istiyorsunuz, PR2 nin başlangıç değeri ne olmalıdır? Cevap: POST = 16 için; PR2 = [ 5 ms / [(1/30 MHz)*4*PRE*16] ] = [0.005/[3.33e-8 * 4 * PRE*16] Buradan; PRE = 1 için PR2 = 2343, PRE = 4 için PR2 = 585 ve PRE = 16 için PR2 = 145 değerleri elde edilir.




35 Örnek 11: TMR2 kesmesi ile PORTB ye bağlı bitleri tersleyen program. Program; Yaklaşık 8 sn de bir tersleme yapmaktadır


36 Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olma sı durumunda isteklere / olaylara cevap verilmesini sağlayan mekanizmadır. Bu mekanizma, mikro denetle yici ile çevre birimleri arasındaki bağlantıları oluşturması ve ilişkileri düzenlemesi nedeniyle çok önemli bir yer e sahiptir. Oluşan her kesme programı ile programın normal işlenme süreci değiştirilerek program durdurulur ve kes me ile ilgili rutin/altprogram gerçekleştirildikten sonra ana programın işlenmesi kalınan noktadan devam edilir Bütün PIC 16F mikro denetleyicileri dört farklı kaynaktan kesme alabilir. Bunlar; YRD.DOC.Dr.BÜLENT ÇOBANOĞLU

37 PIC16F877 Kesme Kaynakları YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
Komutların İşlem Süresi
 Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
PIC MCU da Komutların İşlem Süresi
 PIC MCU da Komutların İşlem Süresi PIC lerde dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. Hazırlayan: Dr.Bülent ÇOBANOĞLU 1 PIC in Bir Komutu
PIC MCU da Komutların İşlem Süresi PIC lerde dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. Hazırlayan: Dr.Bülent ÇOBANOĞLU 1 PIC in Bir Komutu
PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI
 P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
BÖLÜM 2 INTERRUPT ve TIMER İŞLEMLERİ
 BÖLÜM 2 INTERRUPT ve TIMER İŞLEMLERİ 2.1) Hi-Tech te Interrupt İşlemleri Interrupt ya da diğer adıyla kesme, bir çok işlemin olmazsa olmazlarındandır. Pic16f877 de 15 ten fazla kesme kaynağı bulunur. Kesme
BÖLÜM 2 INTERRUPT ve TIMER İŞLEMLERİ 2.1) Hi-Tech te Interrupt İşlemleri Interrupt ya da diğer adıyla kesme, bir çok işlemin olmazsa olmazlarındandır. Pic16f877 de 15 ten fazla kesme kaynağı bulunur. Kesme
Yrd.Doç. Dr. Bülent ÇOBANOĞLU. Sakarya Üniversitesi, Teknoloji Fakültesi
 B Yrd.Doç. Dr. Bülent ÇOBANOĞLU Sakarya Üniversitesi, Teknoloji Fakültesi Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olması durumunda
B Yrd.Doç. Dr. Bülent ÇOBANOĞLU Sakarya Üniversitesi, Teknoloji Fakültesi Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olması durumunda
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
TIMER. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 TIMER SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı birimi bulunmaktadır. o Timer0 8 bitlik
TIMER SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı birimi bulunmaktadır. o Timer0 8 bitlik
7 Segment Display ve Kesmeler (Interrupts) Hafta6-7. Dr. Bülent Çobanoğlu-SAÜ 1
 Hafta6-7. Dr. Bülent Çobanoğlu-SAÜ 1") 7 Segment Display ve Kesmeler (Interrupts) Hafta6-7 Dr. Bülent Çobanoğlu-SAÜ 1 Çevrim Tabloları Ve 7 Segment Display Uygulaması Çevrim / Bakış tabloları ile bir kodu başka bir koda dönüştürmek için kullanılırlar.
7 Segment Display ve Kesmeler (Interrupts) Hafta6-7 Dr. Bülent Çobanoğlu-SAÜ 1 Çevrim Tabloları Ve 7 Segment Display Uygulaması Çevrim / Bakış tabloları ile bir kodu başka bir koda dönüştürmek için kullanılırlar.
BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ
 BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ 3.1) Hi-Tech te CCP İşlemleri Pic içerisinde dahili olarak bulunan CCP modülü Copture (yakalama), Compare (karşılaştırma) ve PWM bölümlerinin baş harflerinin
BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ 3.1) Hi-Tech te CCP İşlemleri Pic içerisinde dahili olarak bulunan CCP modülü Copture (yakalama), Compare (karşılaştırma) ve PWM bölümlerinin baş harflerinin
Mikro denetleyicili Uygulama devresi bileşenleri
 Mikro denetleyicili Uygulama devresi bileşenleri Bir PIC mikro denetleyici ile uygulama gerçekleştirebilmek için ; Besleme devresi, Reset sinyali, Osilatör devresi, Uygulama devresi elemanlarına İhtiyaç
Mikro denetleyicili Uygulama devresi bileşenleri Bir PIC mikro denetleyici ile uygulama gerçekleştirebilmek için ; Besleme devresi, Reset sinyali, Osilatör devresi, Uygulama devresi elemanlarına İhtiyaç
Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk.
 HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
DENEY-4. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-4 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ZAMANLAYICI VE SAYICILAR PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı
DENEY-4 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ZAMANLAYICI VE SAYICILAR PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı
PIC MCU ile UYGULAMALAR
 PIC MCU ile UYGULAMALAR Gecikme Programları TMRO Gecikmesi 7 Segment Göstergeler Sayaç Örnekleri Trafik Sinyalizasyonu ADC-DAC Uygulamaları Kesmeler ve Uygulamaları Tuş Takımı (Keypad) Uygulamaları Paralel
PIC MCU ile UYGULAMALAR Gecikme Programları TMRO Gecikmesi 7 Segment Göstergeler Sayaç Örnekleri Trafik Sinyalizasyonu ADC-DAC Uygulamaları Kesmeler ve Uygulamaları Tuş Takımı (Keypad) Uygulamaları Paralel
KOMUT AÇIKLAMALARI VE ÖRNEKLERİ
 KOMUT AÇIKLAMALARI VE ÖRNEKLERİ Komut açıklamalarında kullanılan harflerin anlamları: F : File(dosya), kaynak ve bilgi alınan yeri ifade eder. D : Destination (hedef), işlem sonucunun kaydedileceği yer.
KOMUT AÇIKLAMALARI VE ÖRNEKLERİ Komut açıklamalarında kullanılan harflerin anlamları: F : File(dosya), kaynak ve bilgi alınan yeri ifade eder. D : Destination (hedef), işlem sonucunun kaydedileceği yer.
Deney No Deney Adı Tarih. 3 Mikrodenetleyici Portlarının Giriş Olarak Kullanılması / /201...
 3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı
 1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
BSF STATUS,5 ;bank1 e geçiş CLRF TRISB ;TRISB=00000000 BCF STATUS,5 ;bank0 a geçiş
 +5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
+5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ
 DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
LCD (Liquid Crystal Display )
") LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
KONFİGÜRASYON BİTLERİ
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 2) Doç. Dr. Hakan Ündil INCLUDE Dosyalar Assembly programlarını yazarken kullanılacak register adreslerini (EQU) komutu ile tanımlamak hem
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 2) Doç. Dr. Hakan Ündil INCLUDE Dosyalar Assembly programlarını yazarken kullanılacak register adreslerini (EQU) komutu ile tanımlamak hem
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu PIC Assembly Dersleri 4. Ders: Kesme Đşlemleri ve Timer Bileşeninin Kullanımı HUNRobotX - PIC Assembly Dersleri 4. Ders: Kesme Đşlemleri ve Timer Bileşeninin Kullanımı Yazan:
Hacettepe Robot Topluluğu PIC Assembly Dersleri 4. Ders: Kesme Đşlemleri ve Timer Bileşeninin Kullanımı HUNRobotX - PIC Assembly Dersleri 4. Ders: Kesme Đşlemleri ve Timer Bileşeninin Kullanımı Yazan:
16F84 ü tanıt, PORTB çıkış MOVLW h FF MOWF PORTB
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
IŞIĞA YÖNELEN PANEL. Muhammet Emre Irmak. Mustafa Kemal Üniversitesi Mühendislik Fakültesi. Elektrik-Elektronik Mühendisliği Bölümü
 IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
Bank değiştirme Bir banktan diğerine geçmek için STATUS register denilen özel registerin 5. ve 6. bitinin durumunu değiştirmek gerekir.
 File register haritası Bank 0 Bank 1 0 00 INDF 0 80 INDF 0 01 TNF0 0 81 OPTION 0 02 PCL 0 82 PCL 0 03 STATUS 0 83 STATUS 0 04 FSR 0 84 FSR 0 05 PORT A 0 85 TRISA 0 06 PORT B 0 86 TRISB 0 07 0 87 EEPROM
File register haritası Bank 0 Bank 1 0 00 INDF 0 80 INDF 0 01 TNF0 0 81 OPTION 0 02 PCL 0 82 PCL 0 03 STATUS 0 83 STATUS 0 04 FSR 0 84 FSR 0 05 PORT A 0 85 TRISA 0 06 PORT B 0 86 TRISB 0 07 0 87 EEPROM
PIC Mikrodenetleyiciler. Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1
 PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA UYGULAMA_05_01 UYGULAMA_05_01. Doç.Dr. SERDAR KÜÇÜK
 UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME
 DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME Ders 13, Slayt 2 1 TMR0 SAYICISI Ram belleğin h 01 adresi TMR0 adlı özel amaçlı bir saklayıcı olarak düzenlenmiştir. Bu saklayıcı bir sayıcıdır.
DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME Ders 13, Slayt 2 1 TMR0 SAYICISI Ram belleğin h 01 adresi TMR0 adlı özel amaçlı bir saklayıcı olarak düzenlenmiştir. Bu saklayıcı bir sayıcıdır.
Program Kodları. void main() { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }
 { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }") Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - başla - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - başla - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic
İstanbul Teknik Üniversitesi IEEE Öğrenci Kolu
 Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Assembler program yazımında direkt olarak çizgi ile gösterilmemesine rağmen ekranınız ya da kağıdınız 4 ayrı sütunmuş gibi düşünülür.
 BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
DENEY-5. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-5 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 MİKRODENETLEYİCİDE KESME BİRİMİ Mikrodenetleyicinin değişik kaynaklardan gelen uyarıcı sinyaller
DENEY-5 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 MİKRODENETLEYİCİDE KESME BİRİMİ Mikrodenetleyicinin değişik kaynaklardan gelen uyarıcı sinyaller
PIC TABANLI, 4 BASAMAKLI VE SER
 PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ
 T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: 8085 Simülatör Kullanımı Deney_2: 8085
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: 8085 Simülatör Kullanımı Deney_2: 8085
BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: 3.2.KOMUTLAR VE KULLANIM ÖRNEKLERİ
 BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: f : File register, Herhangi bir değişkenle tarif edilen bir saklayıcı adresi (0h-7Fh) k : Sabit değer (genellikle (0-FF arasında) d : Destination
BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: f : File register, Herhangi bir değişkenle tarif edilen bir saklayıcı adresi (0h-7Fh) k : Sabit değer (genellikle (0-FF arasında) d : Destination
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK. PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü
 DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI
 MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI S1. Aşağıdaki eleman ya da birimlerden hangisi genel bir bilgisayar sisteminin donanımsal yapısında yer almaz? a) Mikroişlemci (CPU) b) Bellek
MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI S1. Aşağıdaki eleman ya da birimlerden hangisi genel bir bilgisayar sisteminin donanımsal yapısında yer almaz? a) Mikroişlemci (CPU) b) Bellek
5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
 ve Z BAYRAĞI") MİKRO DENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan Ündil 2015-2016 Bahar-Vize (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
MİKRO DENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan Ündil 2015-2016 Bahar-Vize (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
LCD (Liquid Crystal Display)
") LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
W SAYAC SAYAC SAYAC. SAYAC=10110110 ise, d=0 W 01001001
 MOVLW k Move Literal to W k sabit değerini W saklayıcısına yükler. MOVLW h'1a' W 1A. Hexadecimal 1A sayısı W registerine yüklenir. MOVF f,d Move f f saklayıcısının içeriğini W veya f'e yükler. MOVF SAYAC,0
MOVLW k Move Literal to W k sabit değerini W saklayıcısına yükler. MOVLW h'1a' W 1A. Hexadecimal 1A sayısı W registerine yüklenir. MOVF f,d Move f f saklayıcısının içeriğini W veya f'e yükler. MOVF SAYAC,0
BÖLÜM 1: MİKRODENETLEYİCİLER
 V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-FİNAL KISMI
 MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2017-2018 Bahar-FİNAL KISMI BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan bitlerin (C
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2017-2018 Bahar-FİNAL KISMI BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan bitlerin (C
MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil Bahar-Vize
 Prof. Dr. Hakan Ündil Bahar-Vize") MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil 2014-2015 Bahar-Vize BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil 2014-2015 Bahar-Vize BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI. öğrencilerine eğitimleri esnasında iş hayatında karşılaşabilecekleri kontrol işlemleri ve
 MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ
 T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: Program yazma, derleme, pic e yükleme,
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: Program yazma, derleme, pic e yükleme,
BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR?
 0 BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR? Programlamada döngü kadar etkili bir diğer kullanım şekli de alt programlardır. Bu sistemde işlemin birkaç yerinde lazım olan bir program parçasını tekrar
0 BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR? Programlamada döngü kadar etkili bir diğer kullanım şekli de alt programlardır. Bu sistemde işlemin birkaç yerinde lazım olan bir program parçasını tekrar
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI
 PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
BÖLÜM 7 XTAL2 XTAL1. Vss. Şekil Mikrodenetleyicisi osilatör bağlantı şekli. Bir Makine Çevrimi = 12 Osilatör Periyodu
 BÖLÜM 7 7. ZAMANLAYICI/SAYICI YAPISI: 7.1. Sistem Saat üreteci ve Makine Çevrimi Bilgi: Saat üreteci bir mikrodenetleyicinin fonksiyonlarını yerine getirebilmesi için gerekli olan saat darbelerini üreten
BÖLÜM 7 7. ZAMANLAYICI/SAYICI YAPISI: 7.1. Sistem Saat üreteci ve Makine Çevrimi Bilgi: Saat üreteci bir mikrodenetleyicinin fonksiyonlarını yerine getirebilmesi için gerekli olan saat darbelerini üreten
DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK
 KULLANIMI İÇERİK") DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK KESME NEDİR KESME ÇEŞİTLERİ INTCON SAKLAYICISI RBO/INT KESMESİ PORTB (RB4-RB7) LOJİK SEVİYE DEĞİŞİKLİK KESMESİ Ders 12, Slayt 2 1 KESME PIC in bazı
DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK KESME NEDİR KESME ÇEŞİTLERİ INTCON SAKLAYICISI RBO/INT KESMESİ PORTB (RB4-RB7) LOJİK SEVİYE DEĞİŞİKLİK KESMESİ Ders 12, Slayt 2 1 KESME PIC in bazı
Hyper Terminal programı çalıştırıp Uygun COM portu ve iletişim parametrelerinin ayarları yapılıp bekletilmelidir.
 DENEY 1: PIC 16F84 DEN BİLGİSAYARA VERİ GÖNDERME Bu uygulamada verici kısım PIC16F84, alıcı kısım ise bilgisayardır. Asenkron iletişim kurallarına göre her iki tarafta aynı parametreler kullanılacaktır.
DENEY 1: PIC 16F84 DEN BİLGİSAYARA VERİ GÖNDERME Bu uygulamada verici kısım PIC16F84, alıcı kısım ise bilgisayardır. Asenkron iletişim kurallarına göre her iki tarafta aynı parametreler kullanılacaktır.
Mikroişlemciler. Microchip PIC
 Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
www.firatdeveci.com Sayfa 1
 Ön Söz Antik Yunan da ilk kehribarın maddeleri çekmesiyle başlayan elektrik serüveni tarih içinde bir çok değişik formda bulunmuş, değişmiş, evrim geçirmiştir. Galvani, Volta, Faraday, Amperé ve Ohm un
Ön Söz Antik Yunan da ilk kehribarın maddeleri çekmesiyle başlayan elektrik serüveni tarih içinde bir çok değişik formda bulunmuş, değişmiş, evrim geçirmiştir. Galvani, Volta, Faraday, Amperé ve Ohm un
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
Ön Söz. Fırat Deveci Ağustos 2009 fxdev@fxdev.org. Elektrik ve elektroniğe gönül veren herkese. FxDev.org Sayfa 1
 Ön Söz Antik Yunan da ilk kehribarın maddeleri çekmesiyle başlayan elektrik serüveni tarih içinde bir çok değişik formda bulunmuş, değişmiş, evrim geçirmiştir. Galvani, Volta, Faraday, Amperé ve Ohm un
Ön Söz Antik Yunan da ilk kehribarın maddeleri çekmesiyle başlayan elektrik serüveni tarih içinde bir çok değişik formda bulunmuş, değişmiş, evrim geçirmiştir. Galvani, Volta, Faraday, Amperé ve Ohm un
Sistem Gereksinimleri: Uygulama Gelistirme: PIC Mikroislemcisinin Programlanmasi: PIC Programlama Örnekleri -1
 PIC Programlama Örnekleri -1 Sistem Gereksinimleri: PIC programlayicinin kullanilabilmesi için; Win98 ve üstü bir isletim sistemi Paralel port 60 MB veya daha üstü disk alani gerekmektedir. Ancak programlama
PIC Programlama Örnekleri -1 Sistem Gereksinimleri: PIC programlayicinin kullanilabilmesi için; Win98 ve üstü bir isletim sistemi Paralel port 60 MB veya daha üstü disk alani gerekmektedir. Ancak programlama
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-FİNAL KISMI
 MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2016-2017 Bahar-FİNAL KISMI (NOT: Derslerde işlenen diğer örnekler, Lab. Deneyi ve Sayı Sistemleri de Final sınavına dahildir) BÖLÜM 7 - LOJİK
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2016-2017 Bahar-FİNAL KISMI (NOT: Derslerde işlenen diğer örnekler, Lab. Deneyi ve Sayı Sistemleri de Final sınavına dahildir) BÖLÜM 7 - LOJİK
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
PIC UYGULAMALARI. Öğr.Gör.Bülent Çobanoğlu
 PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2
 T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Dinleme ve anlamlandırma
 Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Ders Dinleme ve anlamlandırma Standart derslik teknolojileri, çoklu ortam araçları, projektör, bilgisayar DERS BİLGİLERİ Ders
Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Ders Dinleme ve anlamlandırma Standart derslik teknolojileri, çoklu ortam araçları, projektör, bilgisayar DERS BİLGİLERİ Ders
3.2 PIC16F84 Yazılımı PIC Assembly Assembler Nedir?
 3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
8 Ledli Havada Kayan Yazı
 8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
Mikroişlemcili Sistemler ve Laboratuvarı
 SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Zamanlayıcılar ve Sayıcılar Doç.Dr. Ahmet Turan ÖZCERİT Doç.Dr. Cüneyt
SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Zamanlayıcılar ve Sayıcılar Doç.Dr. Ahmet Turan ÖZCERİT Doç.Dr. Cüneyt
PIC Mikrodenetleyicileri
 PIC Mikrodenetleyicileri Intel 1976 da 8031/51 ailesini piyasaya sürdüğünde dünyanın en popüler mikroişlemcisi olmuştu. Bu işlemci dünya üzerinde 12 den fazla firma tarafından (İntel, Phillips, Dallas,
PIC Mikrodenetleyicileri Intel 1976 da 8031/51 ailesini piyasaya sürdüğünde dünyanın en popüler mikroişlemcisi olmuştu. Bu işlemci dünya üzerinde 12 den fazla firma tarafından (İntel, Phillips, Dallas,
MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil Bahar
 Prof. Dr. Hakan Ündil Bahar") MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil 2016-2017 Bahar (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 6. BÖLÜM - ALT PROGRAMLAR Program içerisinde
MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil 2016-2017 Bahar (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 6. BÖLÜM - ALT PROGRAMLAR Program içerisinde
Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre
 MİKRODENETLEYİCİLER Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre Mikrodenetleyici: Bir mikroişlemcinin
MİKRODENETLEYİCİLER Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre Mikrodenetleyici: Bir mikroişlemcinin
T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ BİTİRME ÖDEVİ
 T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ BİTİRME ÖDEVİ ÜÇ ODA BİR SALON BİR EV İÇİN HIRSIZ ALARMININ GERÇEKLEŞTİRİLMESİ HAZIRLAYAN Cevdet Selçuk KAHYALAR
T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ BİTİRME ÖDEVİ ÜÇ ODA BİR SALON BİR EV İÇİN HIRSIZ ALARMININ GERÇEKLEŞTİRİLMESİ HAZIRLAYAN Cevdet Selçuk KAHYALAR
MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final
 MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 5 Zamanlayıcılar Zamanlayıcı/Sayıcı 3 Zamanlayıcı/Sayıcı Zamanlayıcı: Zaman geciktirici olarak kullanıldığında verilen isim. Sayıcı:
MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 5 Zamanlayıcılar Zamanlayıcı/Sayıcı 3 Zamanlayıcı/Sayıcı Zamanlayıcı: Zaman geciktirici olarak kullanıldığında verilen isim. Sayıcı:
KESME (INTERRUPT) NEDİR?
 NEDİR?") KESME (INTERRUPT) NEDİR? Mikro işlemcilerle yeni çalışmaya başlayan çoğu kimseler, interrupt kelimesini duymalarına rağmen, kullanımlarının zor olduğu düşüncesiyle programları içerisinde kullanmaktan çekinirler.
KESME (INTERRUPT) NEDİR? Mikro işlemcilerle yeni çalışmaya başlayan çoğu kimseler, interrupt kelimesini duymalarına rağmen, kullanımlarının zor olduğu düşüncesiyle programları içerisinde kullanmaktan çekinirler.
HUNRobotX - Makaleler - Hız Ayarlı Çoklu DC Motor Kontrolü. Makaleler Hız Ayarlı Çoklu DC Motor Kontrolü
 Makaleler Hız Ayarlı Çoklu DC Motor Kontrolü Hız Ayarlı Çoklu DC Motor Kontrolü Yazan: Mustafa Tufaner, Düzenleyen: Canol Gökel - 18 Kasım 2006 Giriş Robotikte sıkça kullanılabilecek bir uygulama ile karşınızdayız.
Makaleler Hız Ayarlı Çoklu DC Motor Kontrolü Hız Ayarlı Çoklu DC Motor Kontrolü Yazan: Mustafa Tufaner, Düzenleyen: Canol Gökel - 18 Kasım 2006 Giriş Robotikte sıkça kullanılabilecek bir uygulama ile karşınızdayız.
www.muhendisiz.net BÖLÜM 1
 www.muhendisiz.net BÖLÜM 1 IR HABERLEŞME 1.1.IR Haberleşme Sisteminin Gerçekleştirilmesi Tüm haberleşme sistemlerinde olduğu gibi IR haberleşme sistemlerinde de modülasyon tekniğinden yararlanılır. IR
www.muhendisiz.net BÖLÜM 1 IR HABERLEŞME 1.1.IR Haberleşme Sisteminin Gerçekleştirilmesi Tüm haberleşme sistemlerinde olduğu gibi IR haberleşme sistemlerinde de modülasyon tekniğinden yararlanılır. IR
T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ BİTİRME ÖDEVİ
 T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ BİTİRME ÖDEVİ ÜÇ ODA BİR SALON BİR EV İÇİN HIRSIZ ALARMININ GERÇEKLEŞTİRİLMESİ HAZIRLAYAN Cevdet Selçuk KAHYALAR
T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ BİTİRME ÖDEVİ ÜÇ ODA BİR SALON BİR EV İÇİN HIRSIZ ALARMININ GERÇEKLEŞTİRİLMESİ HAZIRLAYAN Cevdet Selçuk KAHYALAR
Yrd. Doç.Dr. Bülent ÇOBANOĞLU. Hazırlayan:Yrd.Doç.Dr.Bülent ÇOBANOĞLU 1
 B Yrd. Doç.Dr. Bülent ÇOBANOĞLU Hazırlayan:Yrd.Doç.Dr.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen yazılımlarda kullanılan alt
B Yrd. Doç.Dr. Bülent ÇOBANOĞLU Hazırlayan:Yrd.Doç.Dr.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen yazılımlarda kullanılan alt
PROGRAMLANABİLİR ZAMANLAYICI
 T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PROGRAMLANABİLİR ZAMANLAYICI BİTİRME ÇALIŞMASI SULTAN ÜÇOK 203786 HAZİRAN,2011 TRABZON T.C. KARADENİZ TEKNİK
T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PROGRAMLANABİLİR ZAMANLAYICI BİTİRME ÇALIŞMASI SULTAN ÜÇOK 203786 HAZİRAN,2011 TRABZON T.C. KARADENİZ TEKNİK
Alıcı Devresi; Sinyali şu şekilde modüle ediyoruz;
 Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE DİJİTAL İŞLEMLER 523EO0021 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE DİJİTAL İŞLEMLER 523EO0021 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
MİKRODENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-Final Kısmı
 MİKRODENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2014-2015 Bahar-Final Kısmı (NOT: Derslerde işlenen diğer örnekler de Final sınavına dahildir) BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir
MİKRODENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2014-2015 Bahar-Final Kısmı (NOT: Derslerde işlenen diğer örnekler de Final sınavına dahildir) BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir
5.Eğitim E205. PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628:
 5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Alt Program Yapısı Alt programın çağrılması Alt program korunur alınır ;Argumanlar R12 R15 registerlarına atanir. call #SubroutineLabel SubroutineLabel:
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Alt Program Yapısı Alt programın çağrılması Alt program korunur alınır ;Argumanlar R12 R15 registerlarına atanir. call #SubroutineLabel SubroutineLabel:
Ad Soyad: Öğrenci No:
 ADUC841 sayma değeri P3.4 (T0) osc E TH0 TL0 MOD Seçimi Taşma (overflow) TMOD 1. Giriş kaynağı kontrol GATE0 C/T0 M1 M0 3. Yenileme modu P3.2 (INT0) 2. Çalışma kontrol TCON TF0 TR0 Zamanlayıcı/Sayıcı-0
ADUC841 sayma değeri P3.4 (T0) osc E TH0 TL0 MOD Seçimi Taşma (overflow) TMOD 1. Giriş kaynağı kontrol GATE0 C/T0 M1 M0 3. Yenileme modu P3.2 (INT0) 2. Çalışma kontrol TCON TF0 TR0 Zamanlayıcı/Sayıcı-0
ÖĞRENME FAALİYETİ-1 1. MİKRODENETLEYİCİ PROGRAMI YAZMA
 ÖĞRENME FAALİYETİ-1 AMAÇ ÖĞRENME FAALİYETİ-1 Uygun ortam sağlandığında kurulacak devre için eksiksiz olarak yapabileceksiniz. mikrodenetleyici programını ARAŞTIRMA Mikrodenetleyici çeşitlerini aaştırınız.
ÖĞRENME FAALİYETİ-1 AMAÇ ÖĞRENME FAALİYETİ-1 Uygun ortam sağlandığında kurulacak devre için eksiksiz olarak yapabileceksiniz. mikrodenetleyici programını ARAŞTIRMA Mikrodenetleyici çeşitlerini aaştırınız.
PIC MİKRODENETLEYİCİLERİN HAFIZA YAPISI. Temel olarak bir PIC içerisinde de iki tür hafıza bulunur:
 PIC MİKRODENETLEYİCİLERİN HAFIZA YAPISI Temel olarak bir PIC içerisinde de iki tür hafıza bulunur: 1. Program Hafızası (ROM,PROM,EPROM,FLASH) Programı saklar, kalıcıdır. 2. Veri Hafızası (RAM, EEPROM)
PIC MİKRODENETLEYİCİLERİN HAFIZA YAPISI Temel olarak bir PIC içerisinde de iki tür hafıza bulunur: 1. Program Hafızası (ROM,PROM,EPROM,FLASH) Programı saklar, kalıcıdır. 2. Veri Hafızası (RAM, EEPROM)
Microprocessors and Programming
 Microprocessors and Programming Dr. Kadir ERKAN Department of Mechatronics Engineering Fall : 2013 10/20/2013 1 Interpretation of Assembly Instructions ADDLW h 10 ; literal (constant) oriented ADDWF TOPLA,d
Microprocessors and Programming Dr. Kadir ERKAN Department of Mechatronics Engineering Fall : 2013 10/20/2013 1 Interpretation of Assembly Instructions ADDLW h 10 ; literal (constant) oriented ADDWF TOPLA,d
PIC MCU ile UYGULAMALAR-II
 PIC MCU ile UYGULAMALAR-II ADC-DAC Uygulamaları Paralel LCD Uygulamaları Seri LCD Uygulamaları Step Motorlar DC Motorlar Servo Motorlar YRD.Doc..Dr.BÜLENT ÇOBANOĞLU ADC: Anolog-Digital Çevirici ADC, girişlerine
PIC MCU ile UYGULAMALAR-II ADC-DAC Uygulamaları Paralel LCD Uygulamaları Seri LCD Uygulamaları Step Motorlar DC Motorlar Servo Motorlar YRD.Doc..Dr.BÜLENT ÇOBANOĞLU ADC: Anolog-Digital Çevirici ADC, girişlerine
MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR
 MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR Bülent ÖZBEK Örnek Program -1- B Portuna bağlı LED leri Yakma Bu programda PIC16F84 mikrodenetleyicisinin B portuna bağlı 8 adet LED in yanması sağlanacaktır. Bunu
MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR Bülent ÖZBEK Örnek Program -1- B Portuna bağlı LED leri Yakma Bu programda PIC16F84 mikrodenetleyicisinin B portuna bağlı 8 adet LED in yanması sağlanacaktır. Bunu
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-3 ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-3 ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak
 LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
PIC 16F877 nin kullanılması
 PIC 16F877 nin kullanılması, dünyada kullanıma sunulmasıyla eş zamanlı olarak Türkiye de de uygulama geliştirenlerin kullanımına sunuldu., belki de en popüler PIC işlemcisi olan 16F84 ten sonra kullanıcılara
PIC 16F877 nin kullanılması, dünyada kullanıma sunulmasıyla eş zamanlı olarak Türkiye de de uygulama geliştirenlerin kullanımına sunuldu., belki de en popüler PIC işlemcisi olan 16F84 ten sonra kullanıcılara
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
ADC: Anolog-Digital Çevirici
 ADC: Anolog-Digital Çevirici ADC, girişlerine uygulanan akım, gerilim, sıcaklık gibi analog büyüklükleri değerleri ile orantılı olarak çıkışında digital sinyale çeviren devredir. PIC16F877a da 8 kanallı
ADC: Anolog-Digital Çevirici ADC, girişlerine uygulanan akım, gerilim, sıcaklık gibi analog büyüklükleri değerleri ile orantılı olarak çıkışında digital sinyale çeviren devredir. PIC16F877a da 8 kanallı
Deney 6: Ring (Halka) ve Johnson Sayıcılar
 ve Johnson Sayıcılar") Deney 6: Ring (Halka) ve Johnson Sayıcılar Kullanılan Elemanlar xlm Entegresi, x0 kohm direnç, x00 kohm direnç, x0 µf elektrolitik kondansatör, x00 nf kondansatör, x 7HC7 (D flip-flop), x 0 ohm, x Led
Deney 6: Ring (Halka) ve Johnson Sayıcılar Kullanılan Elemanlar xlm Entegresi, x0 kohm direnç, x00 kohm direnç, x0 µf elektrolitik kondansatör, x00 nf kondansatör, x 7HC7 (D flip-flop), x 0 ohm, x Led
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm Yrd.Doç. Dr.
 http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm B Yrd.Doç. Dr. Bülent ÇOBANOĞLU PIC MİKRODENETLEYİCİ VE AİLESİ PIC, Microchip firması tarafından üretilen,
http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm B Yrd.Doç. Dr. Bülent ÇOBANOĞLU PIC MİKRODENETLEYİCİ VE AİLESİ PIC, Microchip firması tarafından üretilen,