FX-TRN-BEG-E MITSUBISHI PLC EGİTİM YAZILIMI ÇALIŞMA SORULARI VE DERS NOTLARI HAZIRLAYAN: KAHRAMAN ÖNEY
|
|
|
- Ayla Ilhan
- 8 yıl önce
- İzleme sayısı:
Transkript

1 FX-TRN-BEG-E MITSUBISHI PLC EGİTİM YAZILIMI ÇALIŞMA SORULARI VE DERS NOTLARI HAZIRLAYAN: KAHRAMAN ÖNEY ADİL KARAAĞAÇ MESLEKİ VE TEKNİK ANADOLU LİSESİ ENDÜSTRİYEL OTOMASYON SİSTEMLERİ BÖLÜM ÖĞRETMENİ 1

2 2
3 3
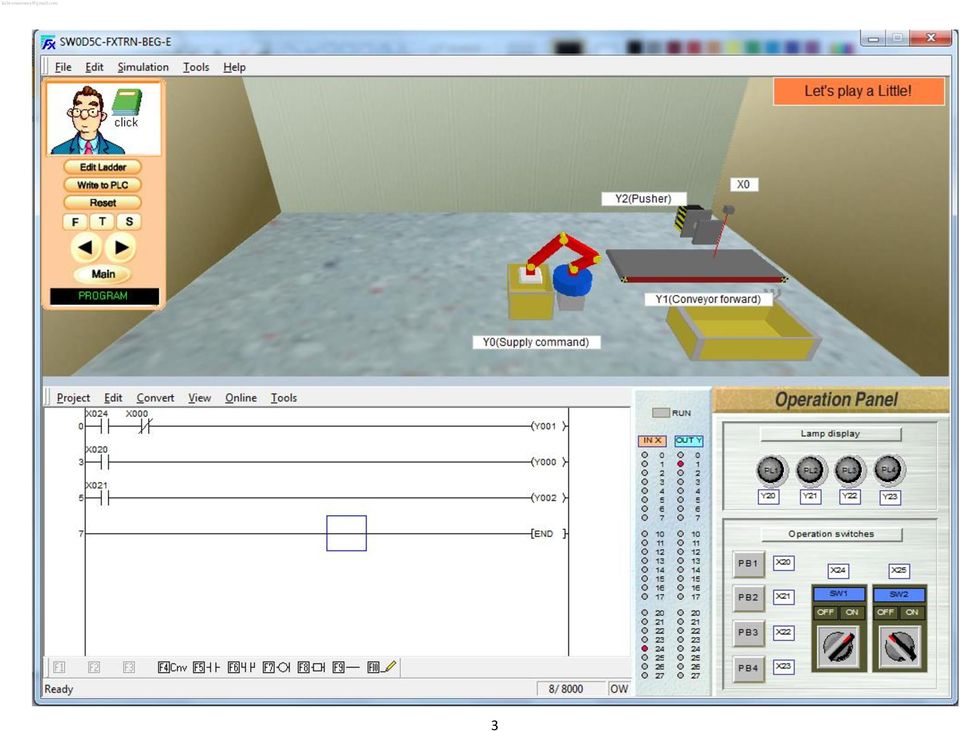
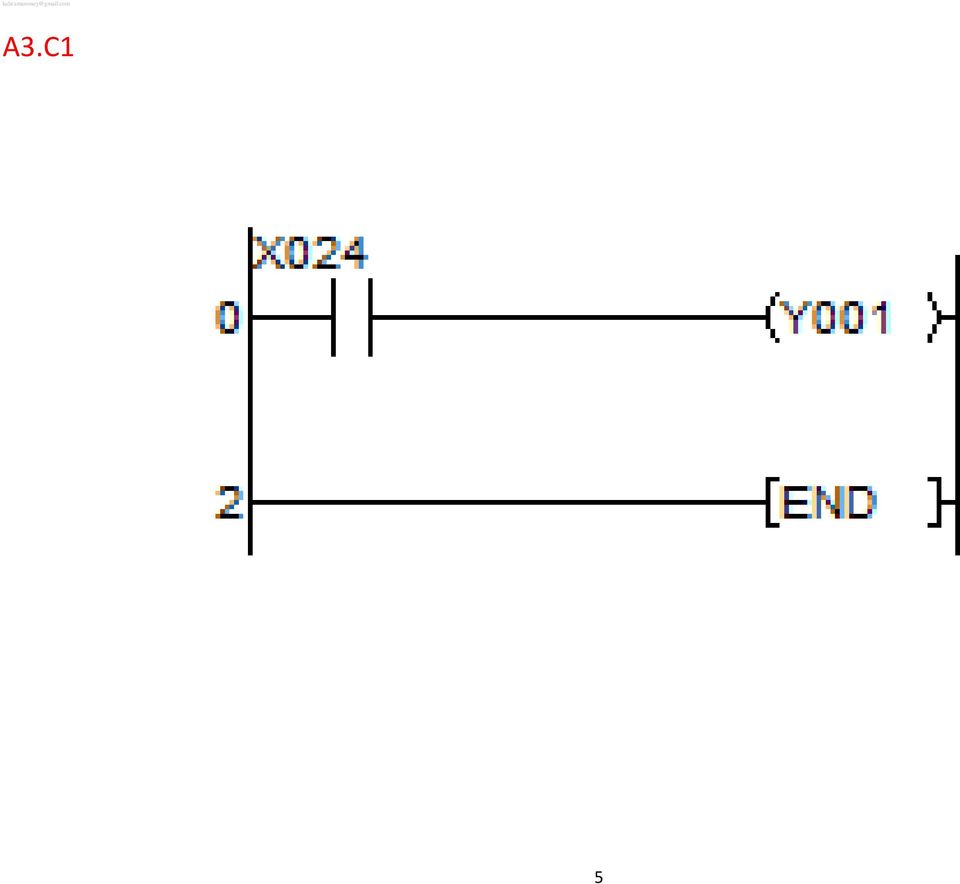
4 A3.S1 X24 paket şalterini ON konumuna aldığımızda yürüyen bandın (Y1) çalışmasını istiyoruz. Ladder diyagramını çizerek uygulayınız. 4

5 A3.C1 5
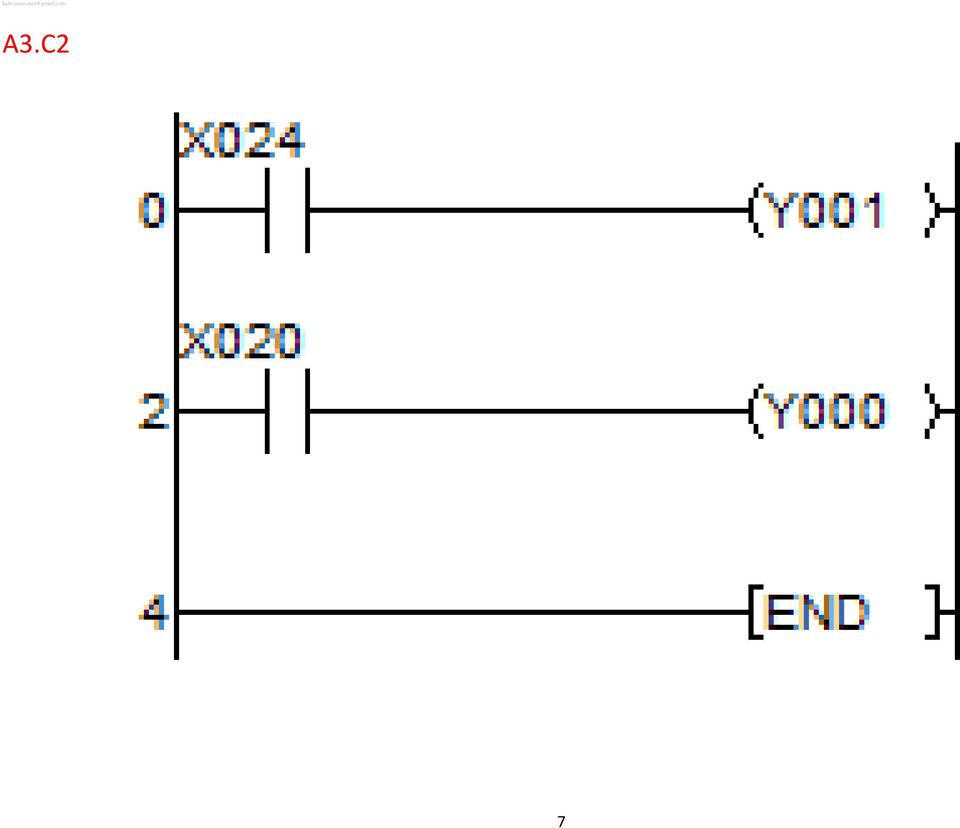
6 A3.S2 X24 paket şalterini ON konumuna aldığımızda yürüyen bandın (Y1) çalışmasını, X20 başlatma butonuna bastığımızda da robotun, yürüyen banda koli koymasını (Y0) istiyoruz. Ladder diyagramını çizerek uygulayınız. 6
 istiyoruz.")
7 A3.C2 7
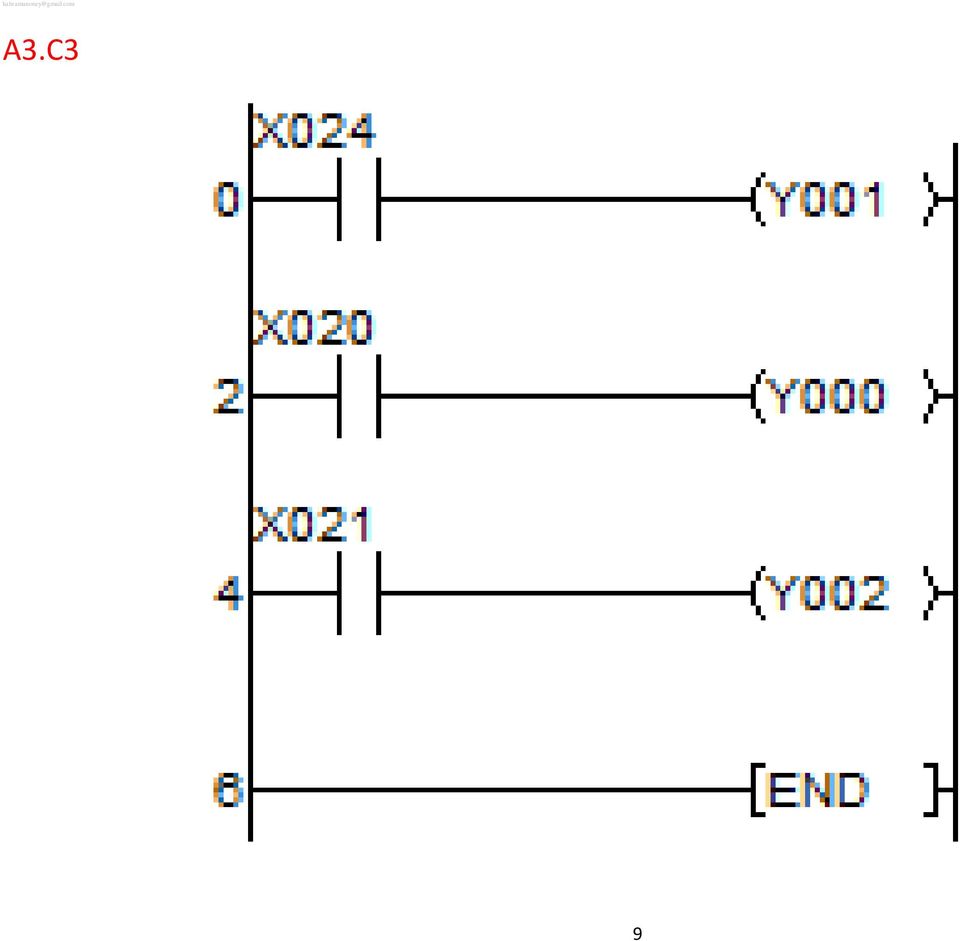
8 A3.S3 X24 paket şalterini ON konumuna aldığımızda yürüyen bandın (Y1) çalışmasını, X20 başlatma butonuna bastığımızda da robotun, yürüyen banda koli koymasını (Y0) istiyoruz. Kolilerin yürüyen banttan yere değil de biriktirme sandığına düşmesi için ise X21 butonu ile iticiyi (Y2) çalıştırmak istiyoruz. Ladder diyagramını çizerek uygulayınız. 8
 çalıştırmak istiyoruz. Ladder diyagramını çizerek uygulayınız.")
9 A3.C3 9
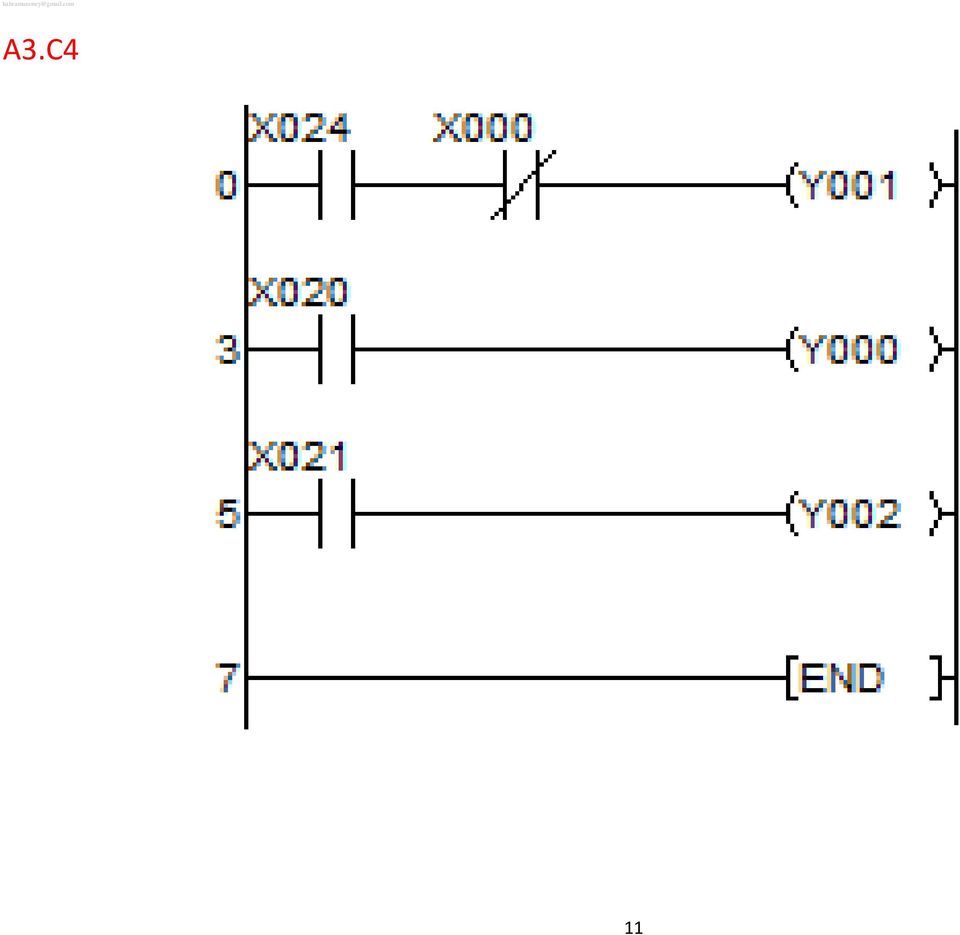
10 A3.S4 X24 paket şalterini ON konumuna aldığımızda yürüyen bandın (Y1) çalışmasını, X20 başlatma butonuna bastığımızda da robotun, yürüyen banda koli koymasını (Y0) istiyoruz. Kolilerin yürüyen banttan yere değil de biriktirme sandığına düşmesi için ise X21 butonu ile iticiyi (Y2) çalıştırmak istiyoruz. Parçaların aşağıya düşmemesi için itici önündeki sensörü (X0) kullanarak ladder diyagramını oluşturup uygulayınız. 10

11 A3.C4 11
12 A3.S5 X24 paket şalterini ON konumuna aldığımızda yürüyen bandın (Y1) çalışmasını, X20 başlatma butonuna bastığımızda da robotun, yürüyen banda koli koymasını (Y0) istiyoruz. Kolilerin yürüyen banttan yere değil de biriktirme sandığına düşmesi için ise X21 butonu veya otomatik olarak iticiyi (Y2) çalıştırmak istiyoruz. Parçaların aşağıya düşmemesi için itici önündeki sensörü (X0) kullanarak ladder diyagramını oluşturup uygulayınız. 12
 çalıştırmak istiyoruz.")
13 A3.C5 13

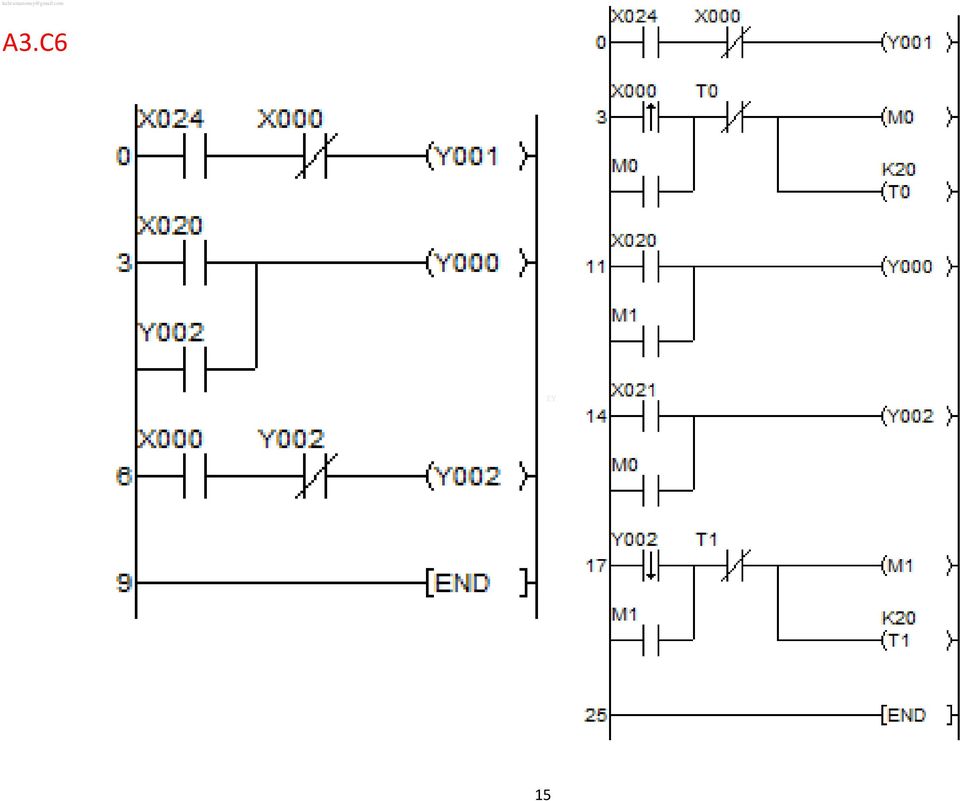
14 A3.S6 X24 paket şalterini ON konumuna aldığımızda yürüyen bandın (Y1) çalışmasını, X20 başlatma butonuna bastığımızda da robotun, yürüyen banda koli koymasını (Y0) istiyoruz. Kolilerin yürüyen banttan yere değil de biriktirme sandığına düşmesi (Y2), ve parçaların robot tarafından tekrar yerleştirilmesi de otomatik olarak gerçekleşsin. Parçaların aşağıya düşmemesi için itici önündeki sensörü (X0) kullanarak ladder diyagramını oluşturup uygulayınız. 14

15 A3.C6 15
16 16
17 17
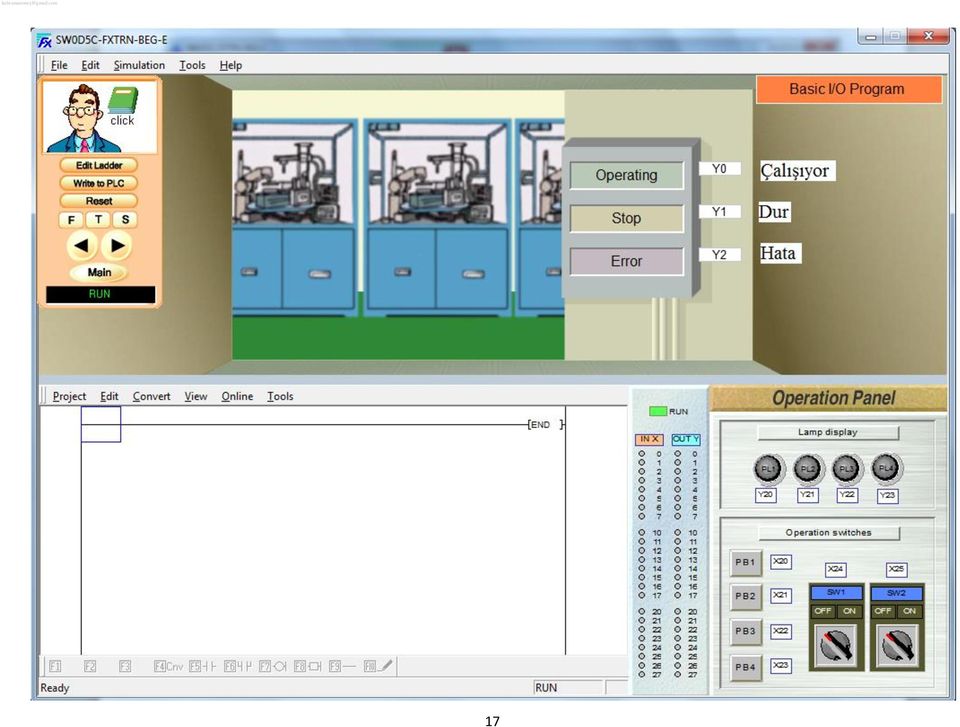
18 B1.S1 PB1 (X20) butonu basılı olduğu sürece Çalışıyor (Y0), basılı olmadığı sürece de Dur / Duruyor (Y1) çıkışının ON olmasını istiyoruz. PB2 (X21) veya PB3 (X22) ile birlikte SW1 (X24) şalteri ON yapılır ise Error Hata (Y2) çıkışının ON olmasını istiyoruz. Ladder diyagramını çizerek uygulayınız. 18
 çıkışının ON olmasını istiyoruz.")
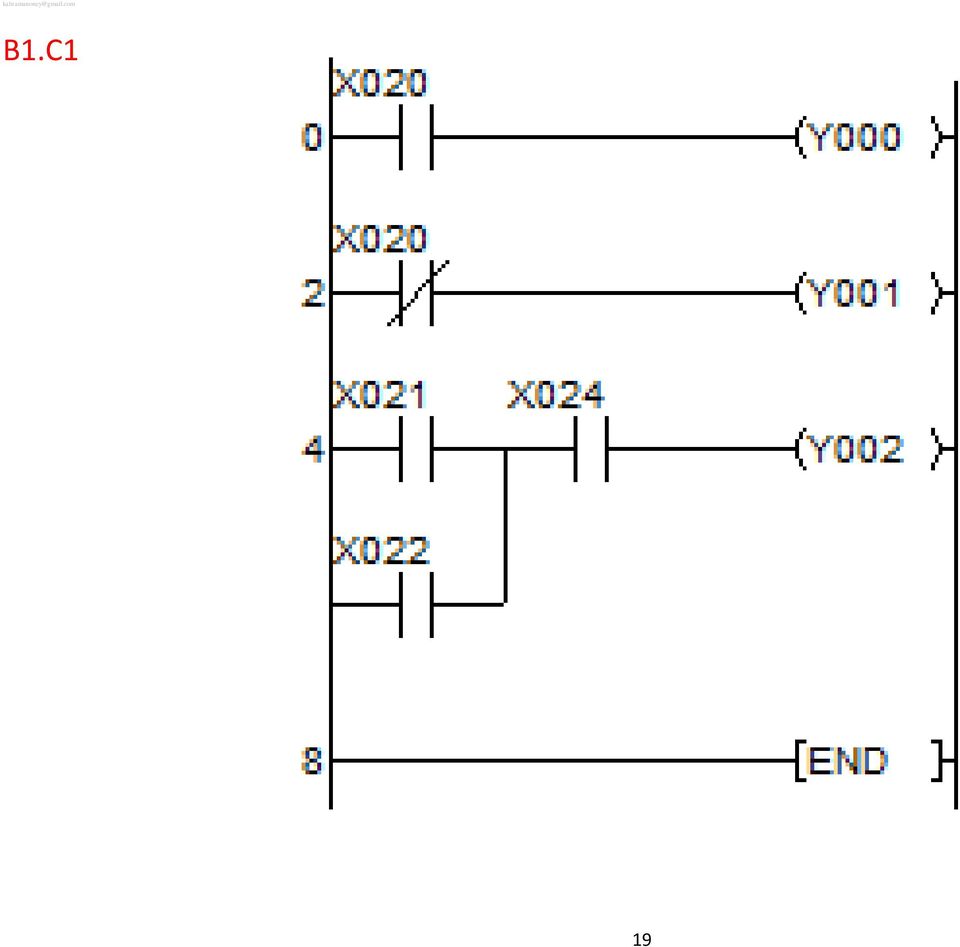
19 B1.C1 19
20 B1.S2 PB1 (X20) butonu basılı olduğu sürece Çalışıyor (Y0), basılı olmadığı sürece de Dur / Duruyor (Y1) çıkışının ON olmasını istiyoruz. PB2 (X21) veya PB3 (X22) ile birlikte SW1 (X24) şalteri ON yapılır ise Error Hata (Y2) çıkışının ON olmasını istiyoruz. Eğer hata çıkışı ON olmuş ise Çalışıyor yada Dur / Duruyor çıkışlarından hiçbirisi ON olmasın. 20

21 B1.C2 21
22 22
23 23
24 B3.S1 X24 anahtarı ON yapılır ise Y0 çıkışına bağlı olan lamba, X25 anahtarı ON yapılır ise Y1 çıkışına bağlı olan lamba ışık versin. Lambalardan herhangi birisi ışık verirken, diğerinin anahtarı ON yapılsa bile ışık veremesin. Ladder diyagramını çizerek uygulayınız. 24
25 B3.C1 25
26 B3.S2 X20 Başlatma butonuna basılır ise Y0 çıkışına bağlı olan lamba, X21 butonuna basılır ise Y1 çıkışına bağlı olan lamba ışık versin. Butonlara bir kez basılması yeterli olsun. Lambalardan herhangi birisi ışık verirken diğeri ışık veremesin. Ladder diyagramını çizerek uygulayınız. 26
27 B3.C2 27
28 B3.S3 X20 Başlatma butonuna basılır ise Y0 çıkışına bağlı olan lamba, X21 butonuna basılır ise Y1 çıkışına bağlı olan lamba ışık versin. Butonlara bir kez basılması yeterli olsun. Lambalardan herhangi birisi ışık verirken diğeri ışık veremesin. X22 butonunu lambaları söndürmek için kullanınız. Ladder diyagramını çizerek uygulayınız. 28
29 B3.C3 29
30 B3.S4 X20 başlatma butonuna basılır ise Y20, X21 e basılır ise Y21, X22 ye basılır ise Y22 çıkışına bağlı olan lamba ışık versin. Bu lambalar, sadece bu butonlara basılı olduğu sürece ışık versinler, lambalardan birisi ışık verirken diğerleri ışık veremesin. Ladder diyagramını çizerek uygulayınız. 30
31 B3.C4 31
32 B3.S5 X20 başlatma butonuna basılır ise Y20, X21 e basılır ise Y21, X22 ye basılır ise Y22 çıkışına bağlı olan lamba ışık versin. Butonlardan herhangi birisine bir kez basılması yeterli olsun, lambalardan birisi ışık verirken diğerleri ışık veremesin. Durdurma butonu olarak X23 butonunu kullanınız. Ladder diyagramını çizerek uygulayınız. 32
33 B3.C5 33
34 B3.S6 X20 başlatma butonuna basılır ise Y20, X21 e basılır ise Y21, X22 ye basılır ise Y22 ve X23 e basılır ise Y23 çıkışına bağlı olan lamba ışık versin. Butonlardan herhangi birisine bir kez basılması yeterli olsun, lambalardan birisi ışık verirken diğerleri ışık veremesin. Durdurma butonu olarak X24 butonunu kullanınız. Ladder diyagramını çizerek uygulayınız. 34
35 B3.C6 35
36 B3.S7 X20 başlatma butonuna basılır basılmaz Y0 çıkışına bağlı olan lamba ışık versin, 5 saniye sonra kendiliğinden sönsün. Ladder diyagramını çizerek uygulayınız. 36
37 B3.C7 37
38 B3.S8 X20 başlatma butonuna basıldıktan 5 saniye sonra Y0 çıkışına bağlı olan lambanın ışık vermesini istiyoruz. Durdurma butonu olarak X21 butonunu kullanınız. Ladder diyagramını çizerek uygulayınız. 38
39 B3.C8 39
40 B3.S9 X20 başlatma butonuna basıldıktan 5 saniye sonra Y0 çıkışına bağlı olan lambanın ışık vermesini, bu lambanın ışığının, durdurma butonu (X21) e basıldıktan 5 saniye sonra sönmesini istiyoruz. Ladder diyagramını çizerek uygulayınız. 40
41 B3.C9 41
42 B3.S10 X20 başlatma butonuna basılır basılmaz Y0 çıkışına bağlı olan lamba 2 saniye süre ile ON olsun, süre sonunda 2 saniye süre ile OFF olsun, süre sonunda yeniden 2 saniye süre ile ON olsun ve bu şekildeki çalışma (Flaşör devresi) X21 durdurma butonuna basılıncaya kadar devam etsin. 42
43 B3.C10 43
44 B3.S11 X20 başlatma butonuna basılır basılmaz Y0 çıkışına bağlı olan lamba 2 saniye süre ile ON olsun, süre sonunda bu lamba sönerek Y1 çıkışına bağlı olan lamba 2 saniye süre ile ON olsun. 2 saniyenin sonunda bu lamba da sönerek yeniden Y0 çıkışına bağlı olan lamba ışık versin. Bu şekildeki çalışma X21 durdurma butonuna basılıncaya kadar devam etsin. Ladder diyagramını çizerek uygulayınız. 44
45 B3.C11 45
46 B3.S12 X20 başlatma butonuna basılır basılmaz Y0 çıkışına bağlı olan lamba 2 saniye süre ile ışık versin, süre sonunda 2 saniye süre ile sönsün, 2 saniye dolunca Y1 çıkışına bağlı olan lamba 2 saniye süre ile ışık versin, süre sonunda bu lamba da 2 saniye süre ile sönsün. Süre dolunca yeniden ilk lamba ışık versin ve bu şekildeki çalışma (çamaşır makinesi motoru) X21 durdurma butonuna basılıncaya kadar devam etsin. 46
47 B3.C12 47
48 B3.S13 X20 başlatma butonuna basılır basılmaz Y20 çıkışına bağlı olan lamba 2 saniye süre ile ışık versin, süre sonunda bu lamba sönerek Y21 çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca bu lamba da sönerek Y22 çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca bu lamba da sönerek Y23 çıkışına bağlı olan lamba yansın. Bu lamba da 2 saniye süre ile ışık verdikten sonra sönsün ve yeniden ilk lamba ışık versin. (Yürüyen lambalar) Durdurma butonu X21 olsun. Ladder diyagramını çizerek uygulayınız. 48
49 B3.C13 49

50 B3.S14 X20 başlatma butonuna basılır basılmaz Y20 çıkışına bağlı olan lamba 2 saniye süre ile ışık versin, süre sonunda bu lamba sönerek Y21 çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca bu lamba da sönerek Y22 çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca bu lamba da sönerek Y23 çıkışına bağlı olan lamba ışık versin, 2 saniye dolunca tekrar Y22 çıkışına bağlı olan lamba, bundan 2 saniye sonra da Y21 çıkışına bağlı olan lamba ışık versin. Daha sonra sistem başa dönsün. (Kara şimşek) Durdurma butonu X21 olsun. Ladder diyagramını çizerek uygulayınız. 50
51 B3.C14 51
52 52
53 53
54 Aşağıdaki Ladder diyagramını inceleyerek nasıl çalıştığını açıklayınız. 54
55 Aşağıdaki Ladder diyagramını inceleyerek nasıl çalıştığını açıklayınız. Bir önceki devre ile farkının olup olmadığına dikkat ediniz. 55
56 Aşağıdaki Ladder diyagramını inceleyerek nasıl çalıştığını açıklayınız. (Kırmızı ve Yeşil lambaların durumları nasıl olur inceleyiniz.) 56
57 B4.S1 X20 başlatma butonuna basılır ise, yürüyen bant ileri yönde çalışacak, X21 başlatma butonuna basılır ise de geri yönde çalışacak. İleri yön ile birlikte sarı lamba (Y7) ve geri yön ile birlikte de yeşil lamba (Y6) çalışacak. Yürüyen bant bir yönde çalışırken diğer yön butonuna basılsa bile, durdurma butonuna (X23) basılmadan diğer yönde çalışamayacak. Ladder diyagramını çizerek uygulayınız. 57
58 B4.C1 58
59 B4.S2 X20 başlatma butonuna basılır basılmaz yürüyen bant ileri yönde dönmeye başlasın, X21 butonuna basıldığında da robot yürüyen banda parça koysun. Robot, yürüyen bant çalışmadığı sürece bant üzerine parça koyamasın. X23 durdurma butonu ile sistem durdurulabilsin. Diyagramını çizip uygulayınız. 59
60 B4.C2 60
61 B4.S3 X20 başlatma butonuna basılır basılmaz yürüyen bant ileri yönde dönmeye başlasın, X21 butonuna basıldığında da robot yürüyen banda parça koysun. Robot, yürüyen bant çalışmadığı sürece bant üzerine parça koyamasın. Sistem, X23 durdurma butonuna basılınca yada yürüyen banttan geçen parça sayısı 5 olunca otomatik olarak dursun. Yeniden başlatma butonu ile tekrar çalışabilsin. Diyagramı çizerek uygulayınız. 61
62 B4.C3 62
63 63
64 64
65 C1.S1 Kapı aşağıda ve X20 başlatma butonuna basılmışsa, kapı yukarıya çıksın, tamamen çıkınca kendiliğinden dursun. (X20 butonuna bir kez basılması yeterli olsun.) Ladder diyagramını çizerek uygulayınız. 65
66 C1.C1 66
67 C1.S2 Yukarıdaki soruya ek olarak; Kapı yukarıda ve X21 başlatma butonuna basılmış ise, kapı aşağı insin, tamamen inince kendiliğinden dursun. (Başlatma butonuna bir kez basılması yeterli olsun) 67
68 C1.C2 68
69 C1.S3 Kapı aşağıda ve X20 başlatma butonuna basılmışsa, kapı yukarıya çıksın, tamamen çıkınca kendiliğinden dursun. (kapı tamamen açık iken yeşil lamba yansın.) Kapı yukarıda ve X21 başlatma butonuna basılmış ise, kapı aşağı insin, tamamen inince kendiliğinden dursun. (Kapı tamamen kapanınca kırmızı ışık yansın.) Kapı ne tam aşağıda nede tam yukarıda ise, yani açılıyor yada kapanıyor ise sarı lamba ışık versin. Ladder diyagramını çizip uygulayınız. 69
70 C1.C3 70
71 C1.S4 Kapı aşağıda ve X20 başlatma butonuna basılmış ise kapı yukarıya çıksın, tamamen çıktıktan sonra 5 saniye süre ile yukarıda beklesin ve süre sonunda kendiliğinden aşağıya insin. Tamamen inince dursun ve tekrar başlatma butonuna basılır ise sistem aynı şekilde tekrar çalışsın. Ladder diyagramını çizip uygulayınız. 71
72 C1.C4 72
73 C1.S5 Kapı aşağıdaysa ve X20 başlatma butonuna basılmış ise, kapı yukarıya çıksın, tamamen yukarıya çıkınca orada 5 saniye süre ile dursun ve tekrar aşağı insin, tamamen aşağı indikten sonra, aşağıda da 5 saniye dursun ve yeniden yukarıya çıksın. Yukarıda yeniden 5 saniyeyi tamamlayınca aşağı insin ve bu işlemler X21 durdurma butonuna basılıncaya kadar devam etsin. Ladder diyagramını çizerek uygulayınız. 73
74 C1.C5 74
75 75
76 76
77 C2.S1 X20 başlatma butonuna basılır basılmaz kırmızı lamba (Y5) ışık versin, elimizi butondan çektikten 3 saniye sonra lamba kendiliğinden sönsün. X21 başlatma butonuna basılır basılmaz yeşil lamba (Y6) ışık versin ve 5 saniye sonra (butona basılma süresi ne olursa olsun) kendiliğinden sönsün. Diyagramını çizerek uygulayınız. 77
78 C2.C1 78
79 79
80 80
81 C3.S1 X24 başlatma butonu ON yapıldıktan 2 saniye sonra yeşil lamba (Y1) ışık versin, 4 saniye sonra ışığı sönsün, tekrar 2 saniye geçince ışık versin ve 4 saniyeyi doldurunca sönsün. Bu şekildeki çalışma X24 butonu OFF yapılıncaya kadar devam etsin. Diyagramını çizerek uygulayınız. 81
82 C3.C1 82
83 C3.S2 X20 başlatma butonuna basıldıktan 2 saniye sonra yeşil lamba (Y1) ışık versin, 4 saniye sonra ışığı sönsün, tekrar 2 saniye geçince ışık versin ve 4 saniyeyi doldurunca sönsün. Bu şekildeki çalışma X21 durdurma butonuna basılıncaya kadar devam etsin. Diyagramını çizerek uygulayınız. 83
84 C3.C2 84
85 85
86 86
87 Aşağıdaki ladder diyagramını uygulayarak çalışmasını inceleyiniz. 87
88 C4.S1 X3 şalteri ON konumuna alındıktan sonra yürüyen bant çalışmaya başlayacak. X2 şalteri ON yapılınca, robot tarafından sürekli parça beslemesi gerçekleştirilecek. Yürüyen bant çalışmadan parça beslemesi yapılamayacaktır. Diyagramı çizerek uygulayınız. 88
89 C4.C1 89
90 C4.S2 X3 şalteri ON konumuna alındıktan sonra yürüyen bant çalışmaya başlayacak, yeşil lamba da (Y4) ışık verecek. X2 şalteri ON yapılınca, robot tarafından sürekli parça beslemesi gerçekleştirilecek, besleme esnasında sarı lamba (Y5)ışık verecek. Yürüyen bant çalışmadan parça beslemesi yapılamayacaktır. Parçalar banttan düşerken de kırmızı lamba (Y3) ışık verecek. Diyagramı çizerek uygulayınız. 90
91 C4.C2 91
92 C4.S3 X3 şalteri ON konumuna alındıktan sonra yürüyen bant çalışmaya başlayacak, yeşil lamba da (Y4) ışık verecek. X2 şalteri ON yapılınca, robot tarafından sürekli parça beslemesi gerçekleştirilecek, besleme esnasında sarı lamba (Y5)ışık verecek. Yürüyen bant çalışmadan parça beslemesi yapılamayacaktır. Parçalar banttan düşerken de kırmızı lamba (Y3) ışık verecek. Banttan düşen parça sayısı 10 olunca sistem kendiliğinden duracak, sayıcıya ait gösterge (Y6) yanacak, reset butonuna (X1) basılınca sistem tekrar baştan çalışmaya başlayacak. Diyagramı çizerek uygulayınız. 92
93 C4.C3 93
94 C4.C3 94
95 95
96 96
97 D1.S1 Masa üzerinde bulunan 1 numaralı butona (X0) basıldığında, yukarıdaki 1 numaralı çağırma ışığı (Y0), 2 numaralı butona (X1) basıldığında da 2 numaralı çağırma ışığının (Y1) yanmasını istiyoruz. (Butonlara bir kez basılsa bile lambalar sürekli yansınlar) Eğer her iki ışık birlikte yanıyor ise, işlem paneli üzerindeki PL4 (Y23) lambasının da ışık vermesini istiyoruz. Lambaları söndürmek için PB1 butonunu (X20) kullanınız. Diyagramını çizerek uygulayınız. 97
98 D1.C1 98
99 D1.S2 Masa üzerinde bulunan 1 numaralı butona (X0) basıldığında, yukarıdaki 1 numaralı çağırma ışığı (Y0), 2 numaralı butona (X1) basıldığında da 2 numaralı çağırma ışığının (Y1) yanmasını istiyoruz. (Butonlara bir kez basılsa bile lambalar sürekli yansınlar) Eğer her iki ışık birlikte yanıyor ise, işlem paneli üzerindeki PL4 (Y23) lambasının da ışık vermesini istiyoruz. Lambaları söndürmek için PB1 butonunu (X20) kullanınız. Eğer lambaları söndürme butonuna, lambalar yandıktan itibaren 5 saniye içerisinde basılmamış ise, lambalar (Y0 Y1) 5. Saniyeden sonra 1 er saniye aralıklarla sönüp yansınlar. Diyagramını çizerek uygulayınız. 99
100 D1.C2 100
101 101
102 102
103 D2.S1 Kişi sağdan sola doğru hareket ederken, giriş sensörü (X0) tarafından algılanınca yeşil lamba (Y1) ışık verecek, çıkış sensörü (X1)tarafından algılandıktan 5 saniye sonra sönecektir. Diyagramını çizerek uygulayınız. 103
104 D2.C1 104
105 D2.S2 Kişi sağdan sola doğru hareket ederken, giriş sensörü (X0) tarafından algılanınca, yaya için yeşil lamba (Y1) ışık verecek, çıkış sensörü (X1)tarafından algılandıktan 5 saniye sonra sönecektir. Araba soldan sağa doğru hareket ederken, giriş sensörü (X2) tarafından algılanınca araba için yeşil lamba (Y4) ışık verecek, çıkış sensörü (X3) tarafından algılandıktan 5 saniye sonra sönecektir. Diyagramını çizerek uygulayınız. 105
106 D2.C2 106
107 D2.S3 Araba soldan sağa doğru hareket ederken, giriş sensörü (X2) tarafından algılanınca yeşil lamba (Y4) yanacak, çıkış sensörü (X3) tarafından algılandıktan 5 saniye sonra sönecektir. Eğer araba, girdikten itibaren 10 saniye içerisinde çıkış yapmaz ise, kırmızı lamba (Y3) ile buzzer (Y7) de çalışacaktır. Bu durumda olan arabanın çıkışı ile birlikte her iki lamba (Y3, Y4) ile beraber sesli uyarı da (Y7)derhal duracaktır. Diyagramı çizerek uygulayınız. 107
108 D2.C3 108
109 D2.S4 Araba soldan sağa doğru hareket ederken, giriş sensörü (X2) tarafından algılanınca yeşil lamba (Y4) yanacak, çıkış sensörü (X3) tarafından algılandıktan 5 saniye sonra sönecektir. Eğer araba, girdikten itibaren 10 saniye içerisinde çıkış yapmaz ise, kırmızı lamba (Y3) ile buzzer (Y7) de çalışacaktır. Bu durumda olan arabanın çıkışı ile birlikte kırmızı lamba (Y3) ile beraber sesli uyarı da (Y7)derhal duracaktır. Yeşil lamba (Y4)çıkıştan 5 saniye sonra sönecektir. Diyagramı çizerek uygulayınız. 109
110 D2.C4 110

111 111
112 112
113 D3.S1 Trafik ışıkları şu şekilde çalışacaktır; Operasyon paneli üzerindeki [PB1] X20 butonuna basılır basılmaz kırmızı lamba (Y0), 10 saniye süre ile yanacak, süre sonunda kırmızı lamba sönüp 5 saniye süre ile sarı lamba (Y1) yanacak, 5 saniye dolunca sarı lamba da sönüp 10 saniye süre ile yeşil lamba (Y2) yanacak, süre sonunda yeşil lamba da sönüp yeniden kırmızı lamba yanacak. Bu şekildeki çalışma [PB2] X21 durdurma butonuna basılıncaya kadar devam edecek. Diyagramını çizerek uygulayınız. 113
114 D3.C1 114
115 D3.S2 Trafik ışıkları şu şekilde çalışacaktır; Operasyon paneli üzerindeki [PB1] X20 butonuna basılır basılmaz kırmızı lamba (Y0), 10 saniye süre ile yanacak, süre sonunda kırmızı lamba sönüp 5 saniye süre ile sarı lamba (Y1) yanacak, 5 saniye dolunca sarı lamba da sönüp 10 saniye süre ile yeşil lamba (Y2) yanacak, Ancak, yeşil lamba 4 saniye yandıktan sonra 1 saniye yanık 1 saniye sönük olacak şekilde 10 saniyeyi tamamlayacak, süre sonunda yeşil lamba da sönüp yeniden kırmızı lamba yanacak. Bu şekildeki çalışma [PB2] X21 durdurma butonuna basılıncaya kadar devam edecek. Diyagramını çizerek uygulayınız. 115
116 D3.C2 116
117 D3.S3 Trafik ışıkları şu şekilde çalışacaktır; Operasyon paneli üzerindeki [PB1] X20 butonuna basılır basılmaz kırmızı lamba (Y0), 10 saniye süre ile yanacak ancak, kırmızı lamba 4 saniye yandıktan sonra 1 saniye yanık 1 saniye sönük olacak şekilde 10 saniyeyi tamamlayacak, süre sonunda kırmızı lamba sönüp 5 saniye süre ile sarı lamba (Y1) yanacak, 5 saniye dolunca sarı lamba da sönüp 10 saniye süre ile yeşil lamba (Y2) yanacak, Ancak, yeşil lamba da 4 saniye yandıktan sonra 1 saniye yanık 1 saniye sönük olacak şekilde 10 saniyeyi tamamlayacak, süre sonunda yeşil lamba da sönüp yeniden kırmızı lamba yanacak. Bu şekildeki çalışma [PB2] X21 durdurma butonuna basılıncaya kadar devam edecek. Diyagramını çizerek uygulayınız. 117
118 D3.C3 118
119 D3.S4 Trafik Işıkları aşağıda anlatıldığı şekilde çalışacaktır. (X22 başlatma, X23 durdurma butonu olacak) Başlangıçta arabalar için yeşil ışık (Y2), yayalar için ise kırmızı ışık (Y20) yanacaktır. 1- Eğer yaya tarafından, yol kenarlarındaki X20 yada X21 butonlarından herhangi birine basılır ise, butona basılma anından itibaren 10 saniye sonra, arabalara olan ışık sarıya(y1) dönecek, 3 saniye sonra da kırmızıya (Y0) dönecek, arabalara kırmızı yandıktan 1 saniye sonra yayalara yeşil ışık (Y23) yanacak. Bu ışık 10 saniye kesintisiz yandıktan sonra, birer saniye aralıklarla 5 defa da kesintili olarak yanacak. Süre sonunda yayalara olan ışık kırmızıya dönecek, aynı anda arabalara olan ışık sarıya, 1 saniye sonrasında da yeniden yeşile dönecek. 2- Sistem bu şekilde çalışmasını X23 durdurma butonuna basılıncaya kadar devam ettirecek. Diyagramı çizerek uygulayınız. 119
120 D3.C4a 120
121 D3.C4b 121
122 122
123 123
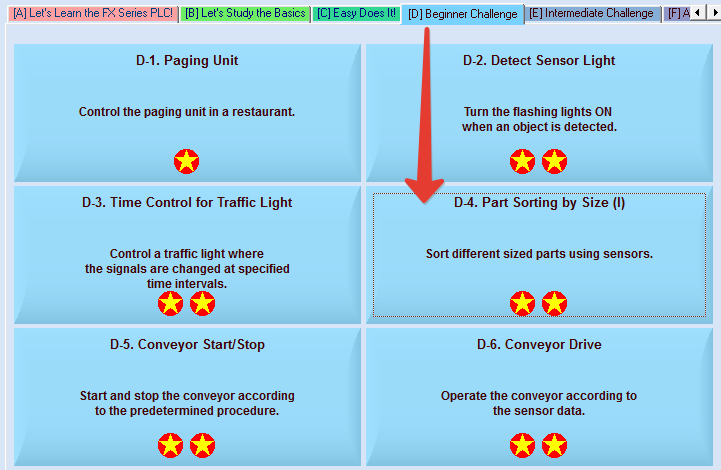
124 D4.S1 X10 başlatma butonuna basıldığında, robot yürüyen banda parça yüklemesi (Y5) yapacak, operasyon başlatma anahtarı (X14) ON yapılınca yürüyen bant (Y3) çalışacak, OFF yapılınca duracak. Yüklenen paçanın boyu, yüksek ise L lambası (Y10), orta ise M lambası (Y11), küçük ise S lambası (Y12) ışık verecek ve bu lambaların ışığı, parçalar yürüyen banttan düşünce (X4) kendiliğinden sönecek. Diyagramı çizerek uygulayınız. 124
125 D4.C1 125
126 126
127 D4.S2 X10 başlatma butonuna basıldığında, robot yürüyen banda parça yüklemesi (Y5) yapacak, operasyon başlatma anahtarı (X14) ON yapılınca yürüyen bant (Y3) çalışacak, OFF yapılınca duracak. Yüklenen paçanın boyu, yüksek ise L lambası (Y10), orta ise M lambası (Y11), küçük ise S lambası (Y12) ışık verecek ve bu lambaların ışığı, parçalar yürüyen banttan düşünce (X4) kendiliğinden sönecek. Yürüyen banttan parçanın düşmesi ile birlikte, robot yeni parçayı otomatik olarak yüklesin. Diyagramı çizerek uygulayınız. 127
128 D4.C2 128
129 129
130 130
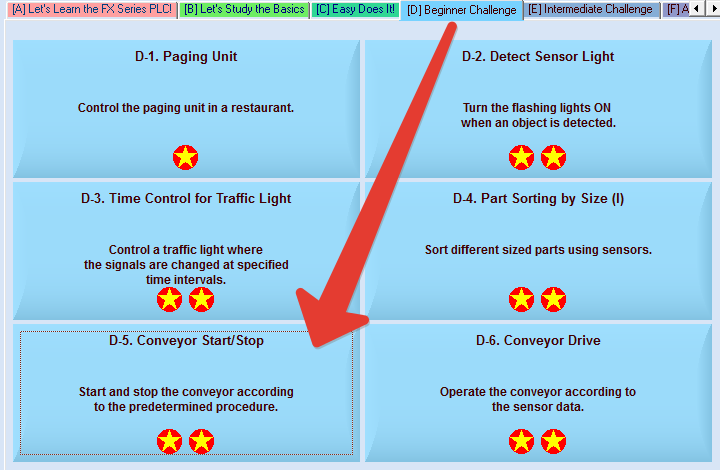
131 D5.S1 X20 Başlatma butonuna basılınca, sarı lamba (Y7) ışık verecek ve aynı anda buzzer de (Y3) ses çıkaracak. 5 saniye sonra bu ikisi de OFF olacaklar ve yürüyen bant (Y1) ileri yönde çalışmaya başlayacak, aynı anda yeşil lamba (Y6) da ışık verecek. Eğer X21 durdurma butonuna herhangi bir anda basılacak olursa, çalışan tüm elemanlar devre dışı kalacak, yeniden başlatma butonuna basılır ise sistem tekrar çalışabilecek. Diyagramını çizerek uygulayınız. 131
132 D5.C1 132
133 D5.S2 X20 Başlatma butonuna basılınca, sarı lamba (Y7) ışık verecek ve aynı anda buzzer de (Y3) ses çıkaracak. 5 saniye sonra bu ikisi de OFF olacaklar ve yürüyen bant (Y1) ileri yönde çalışmaya başlayacak, aynı anda yeşil lamba (Y6) da ışık verecek. Yürüyen bant çalışmaya başladıktan 5 saniye sonra, robot iş parçası yüklemesi yapacak, iş parçası yüklenirken kırmızı lamba da (Y5) ışık verecek, iş parçası banttan düştüğü zaman robot yenisini yükleyecek, bu işlem X21 durdurma butonuna basılıncaya kadar devam edecek. Durdurma butonuna herhangi bir anda basılacak olursa, çalışan tüm elemanlar devre dışı kalacak, yeniden başlatma butonuna basılır ise sistem tekrar çalışabilecek. Diyagramını çizerek uygulayınız. 133
134 D5.C2 134
135 D5.S3 X20 Başlatma butonuna basılınca, sarı lamba (Y7) ışık verecek ve aynı anda buzzer de (Y3) ses çıkaracak. 5 saniye sonra bu ikisi de OFF olacaklar ve yürüyen bant (Y1) ileri yönde çalışmaya başlayacak, aynı anda yeşil lamba (Y6) da ışık verecek. Yürüyen bant çalışmaya başladıktan 5 saniye sonra, robot iş parçası yüklemesi yapacak, iş parçası yüklenirken kırmızı lamba da (Y5) ışık verecek, iş parçası banttan düştüğü zaman robot yenisini yükleyecek, bu işlem X21 durdurma butonuna basılıncaya kadar veya düşen iş parçası sayısı 10 oluncaya kadar devam edecek. Durdurma butonuna herhangi bir anda basılacak olursa, çalışan tüm elemanlar devre dışı kalacak, yeniden başlatma butonuna basılır ise sistem tekrar çalışabilecek. Diyagramını çizerek uygulayınız. 135
136 D5.C3 136
137 137
138 138
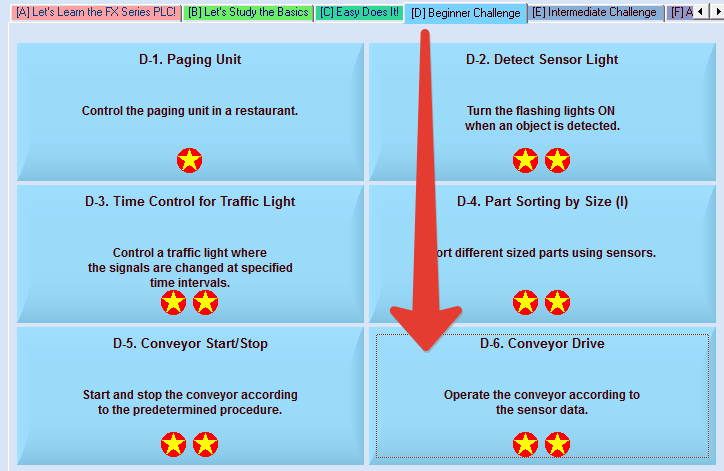
139 D6.S1 X20 başlatma butonuna basılır basılmaz, eğer robot başlangıç pozisyonunda (X5)ise, robot besleme (Y7) komutu çalışacak ve iş parçası üst yürüyen banda konulacak. Bu banttaki sensör (X0) iş parçasını hissettiği zaman, bant yürüyecek, orta banttaki sensör (X1) parçayı algıladığında, üstteki yürüyen bandı durdurup, orta bandı çalıştıracak. Alt banttaki sensör (X2) parçayı algıladığında, üstteki bandı durdurup, alt bandı çalıştıracak. Kutu içerisindeki sensör (X3) parçayı algıladığında ise, alt bandı durduracak, eğer robot başlangıç pozisyonunda ise, yeni iş parçasını koyduracak. Diyagramı çizerek uygulayınız. 139
140 D6.C1 140
141 D6.S2 X20 başlatma butonuna basılır basılmaz, eğer robot başlangıç pozisyonunda (X5)ise, robot besleme (Y7) komutu çalışacak ve iş parçası üst yürüyen banda konulacak. Bu banttaki sensör (X0) iş parçasını hissettiği zaman, bant yürüyecek, orta banttaki sensör (X1) parçayı algıladığında, üstteki yürüyen bandı durdurup, orta bandı çalıştıracak. Alt banttaki sensör (X2) parçayı algıladığında, üstteki bandı durdurup, alt bandı çalıştıracak. Kutu içerisindeki sensör (X3) parçayı algıladığında ise, alt bandı durduracak, eğer robot başlangıç pozisyonunda ise, yeni iş parçasını koyduracak. Üst bant ile beraber PL1 (Y20), orta bant ile beraber PL2 (Y21), alt bant ile beraber de PL3 (Y22) lambaları ışık versin. Diyagramı çizerek uygulayınız. 141
142 D6.C2 142
143 D6.S3 X20 başlatma butonuna basıldığında, robot başlangıç pozisyonunda (X5) ise, parça yüklemesini yapsın. (Y7) Üst yürüyen banttaki sensör (X0) parçayı algıladıktan 2 saniye sonra bu bant (Y0) hareket etsin, orta bant sensörü (X1) parçayı algılar algılamaz üst bandı durdursun ve 2 saniye sonra orta bandı (Y2) çalıştırsın. Alt bant sensörü (X2)de parçayı algıladığında orta bandı durdursun ve alt bandı (Y4) 2 saniye sonra çalıştırsın. Toplama kutusu içerisindeki sensör (X3) parçayı algılar algılamaz alt bandı durdursun. X20 ile tekrar besleme yapılabilsin. Diyagramını çizerek uygulayınız. 143
144 D6.C3 144
145 D6.S4 X20 başlatma butonuna basıldığında, robot başlangıç pozisyonunda (X5) ise, parça yüklemesini yapsın. (Y7) Üst yürüyen banttaki sensör (X0) parçayı algıladıktan 2 saniye sonra bu bant (Y0) hareket etsin, orta bant sensörü (X1) parçayı algılar algılamaz üst bandı durdursun ve 2 saniye sonra orta bandı (Y2) çalıştırsın. Alt bant sensörü (X2)de parçayı algıladığında orta bandı durdursun ve alt bandı (Y4) 2 saniye sonra çalıştırsın. Toplama kutusu içerisindeki sensör (X3) parçayı algılar algılamaz alt bandı durdursun. Üst bant çalışırken PL1 (Y20), orta bant çalışırken PL2 (Y21) ve alt bant çalışırken de PL3 (Y22) ışık versin. X20 ile tekrar besleme yapılabilsin. Diyagramını çizerek uygulayınız. 145
146 D6.C4 146
147 D6.S5 D6.S4 e ek olarak, a) parça toplama kutusu içerisine düştüğü zaman, b) parça orta yürüyen bant sensörü tarafından algılandığı zaman robot otomatik olarak yeni parçayı koysun. Uygulayınız. 147
148 D6.C5 148
149 D6.S6 D6.S5 e ek olarak, herhangi bir anda durdurma butonu (X21) e basılır ise, robot yeni parça yüklemesi yapmasın, yüklenmiş olan parçaların hepsi toplama kutusuna varıncaya kadar geri kalan sistem çalışsın. Uygulayınız. 149
150 D6.C6 150
151 D6.S7 Yukarıdaki soruya ek olarak, kutuya düşen parça sayısı 5 olunca sistem otomatik olarak dursun. Uygulayınız. 151
152 D6.C7 152
153 153
154 154
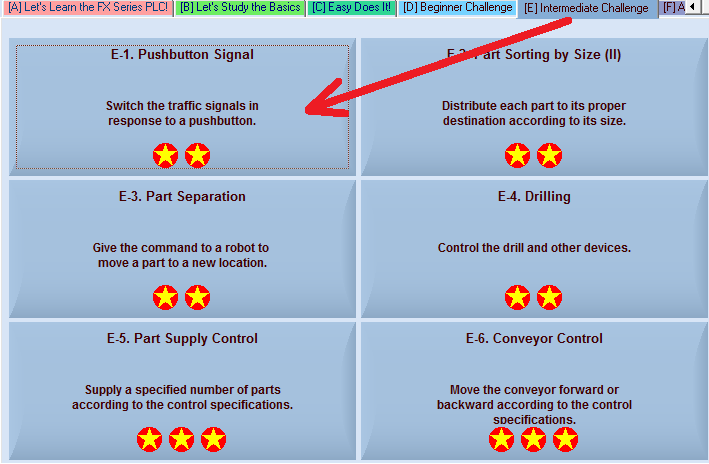
155 E1.S1 PLC RUN moduna alındığında (herhangi bir butona basılmadan), kırmızı lamba (Y0) 1 saniye ON, 1 saniye OFF olacak şekilde sürekli çalışsın. İşlem paneli üzerindeki X10 butonuna basılır ise, aynı paneldeki Y10 çıkışı ON olsun. Y10 çıkışı ON olduğu andan itibaren, 5 saniye süre ile kırmızı lamba başlangıçtaki gibi çalışsın. (flaşör) süre dolunca kırmızı lamba sönsün, 5 saniye süre ile sarı lamba (Y1) yansın, sarı lamba sönünce de 10 saniye süre ile yeşil lamba (Y2) ışık versin. Süre sonunda işlem başa dönsün. Uygulayınız. 155
156 E1.C1 156
157 157
158 E1.S2 Trafik ışıkları aşağıdaki şekilde çalışacaktır; PLC RUN moduna alınır alınmaz 6 saniye süre ile kırmızı ışık (Y0), o sönüp 3 saniye süre ile sarı ışık (Y1), o da sönüp 10 saniye süre ile yeşil ışık (Y2) çalışacak, süre sonunda sistem yeniden kırmızı ışık ile başa dönecek. Eğer herhangi bir anda, operasyon paneli üzerindeki X10 butonuna basılır ise, Y10 çıkışı ON olacak, trafik ışıkları 15 saniye süre ile normal çalışmasına devam edecek, süre sonunda çalışan ışık sarıya dönecek ve bu ışık da 1er saniye aralıklarla ON, OFF olacak, toplam flaşör süresi 5 saniye olunca, sarı lamba sönüp kırmızı lamba yanacak. (Arabalar için) 10 saniye boyunca kırmızı yandıktan sonra, sistem başa dönecek. Uygulayınız. 158
159 E1.C2 159
160 160
161 161
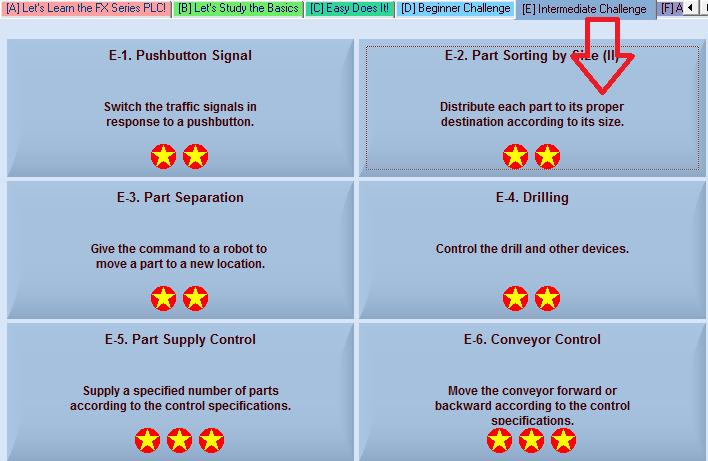
162 E2.S1 Operasyon paneli üzerindeki X24 şalteri ON yapıldığı zaman, yürüyen bantlar (Y1, Y2) çalışmaya başlayacak. Şalter OFF yapılır ise bantlar da duracak. X20 butonuna basıldığında robot parça beslemesi (Y0) yapacak. Robot tarafından, küçük, orta ve büyük parçalar yürüyen banda rastgele konulacak. Eğer konulan parça büyük ise (X1, X2 ve X3 aynı anda algılıyor ise) bu parça arkadaki kutuya gönderilecek. (Y5 ON yapılarak) Eğer parça küçük ise (Sadece X3 sensörü algılıyor ise) bu parça ön kutuya alınacak. (Y5 OFF yapılarak) Uygulayınız. 162
163 E2.C1 163
164 E2.S2 Operasyon paneli üzerindeki X24 şalteri ON yapıldığı zaman, yürüyen bantlar (Y1, Y2) çalışmaya başlayacak. Şalter OFF yapılır ise bantlar da duracak. X20 butonuna basıldığında robot parça beslemesi (Y0) yapacak. Robot tarafından, küçük, orta ve büyük parçalar yürüyen banda rastgele konulacak. Eğer konulan parça büyük ise (X1, X2 ve X3 aynı anda algılıyor ise) bu parça arkadaki kutuya gönderilecek. (Y5 ON yapılarak) Eğer parça küçük ise (Sadece X3 sensörü algılıyor ise) bu parça ön kutuya alınacak. (Y5 OFF yapılarak) İlk parça beslemesinden sonraki parçaların otomatik olarak yüklenmesini istiyoruz. Uygulayınız. 164
165 E2.C2 165
166 E2.S3 Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz. 1) X24 Şalteri ON yapılır ise, yürüyen bantlar (Y1 Y2) çalışacak, aynı anda PL4 (Y23) lambası ışık verecek. Şalter OFF olursa, bantlar duracak ve ışık sönecek. 2) PB1 (X20) Butonuna basılır ve robot başlangıç pozisyonunda ise, robot iş parçasını yürüyen banda yükleyecek, aynı anda 2 saniye süre ile PL1 (Y20) lambası ışık verecek. 3) İş parçası büyük ise (X1, X2,X3 aynı anda algılıyor ise) parça arka kutuya gönderilecek (Y5 ON yapılarak), eğer parça küçük ise (sadece X3 algılıyor ise) bu durumda da ön kutuya (Y5 OFF yapılarak) gönderilecek. 4) İş parçası ön kutuya gidiyor ise, düşme sensörü (X4) algıladıktan itibaren 2 saniye süre ile PL2 (Y21) lambası ışık verecek. Arka kutuya gidiyor ise de, sensör (X5) algıladıktan itibaren 2 saniye süre ile PL3 (Y22) lambası ışık verecek. Diyagramını çizerek uygulayınız. 166
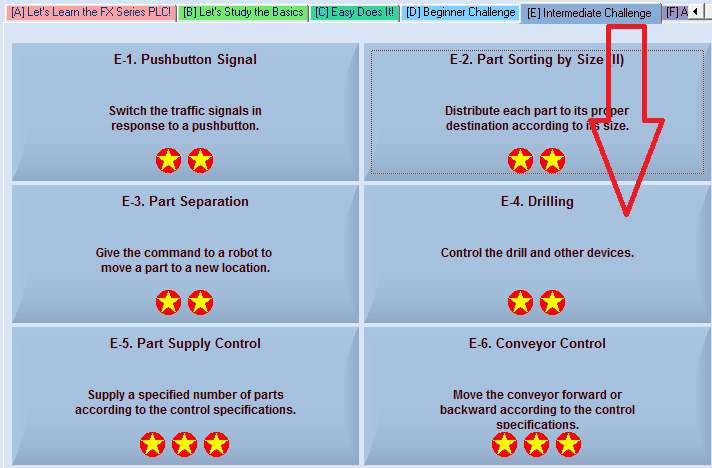
167 E2.C3 167
168 E2.S4 Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz. 1) X24 Şalteri ON yapılır ise, yürüyen bantlar (Y1 Y2) çalışacak, aynı anda PL4 (Y23) lambası ışık verecek. Şalter OFF olursa, bantlar duracak ve ışık sönecek. 2) PB1 (X20) Butonuna basılır ve robot başlangıç pozisyonunda ise, robot iş parçasını yürüyen banda yükleyecek, aynı anda 2 saniye süre ile PL1 (Y20) lambası ışık verecek. 3) İş parçası büyük ise (X1, X2,X3 aynı anda algılıyor ise) parça arka kutuya gönderilecek (Y5 ON yapılarak), eğer parça küçük ise (sadece X3 algılıyor ise) bu durumda da ön kutuya (Y5 OFF yapılarak) gönderilecek. 4) İş parçası ön kutuya gidiyor ise, düşme sensörü (X4) algıladıktan itibaren 2 saniye süre ile PL2 (Y21) lambası ışık verecek. Arka kutuya gidiyor ise de, sensör (X5) algıladıktan itibaren 2 saniye süre ile PL3 (Y22) lambası ışık verecek. 5) Kutulara gelen parça sayısı 5 olunca, ona ait sinyal lambası (Ön kutu için Y21, arka için Y22) sürekli yanmaya başlayacak, her ikisi de 5 parçayı bulunca, her iki lamba da sürekli yanmaya başlayacak. Bundan sonraki ilk yüklemede, her iki sinyal lambası da başlangıçtaki gibi 2 şer saniye süre ile yanmaya başlayacak. (önce her ikisi de sönecek, sensörü algıladıktan sonra çalışmaya başlayacak.) Diyagramını çizerek uygulayınız. 168
169 E2.C4 169
170 170
171 171
172 E3.S1 Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz. 1) Supply Allowed (Parça beslemesi izinli) göstergesi ışık verdiği sürece, tedarik yapılacak. Bu ışık sürekli yanıyor ise, sürekli parça beslemesi (Y0) yapılacak. 2) PLC RUN modunda olduğu sürece, yürüyen bant (Y1) çalışacak. 3) Operasyon panelindeki PB1 (X20) butonu ON yapılır ise, parça beslemesi (Y0) gerçekleştirilecek ve göstergesi de ışık verecek. Eğer PB1 butonu OFF yapılır ise, gösterge ışığı sönecek, parça beslemesi de yapılmayacak. Eğer iş parçası robot önündeki masada ise, besleme yapılamayacak. 4) Yürüyen bant üzerindeki parça, banttan, robot önündeki masaya geçtiği zaman (X1), robot iş parçasını bu masa üzerinden alacak (Y2 set ). Operasyon bitti sensörü (X2) ON olduğu zaman, robotun parçayı alma işlemi sonlandırılacak. (Y2 reset) Robotun iş parçasını masa üzerinden alma işlemi, sadece robot başlangıç noktasında (X0) ise gerçekleşebilecek. Diyagramını çizerek uygulayınız. 172
173 E3.C1 173
174 E3.S2 Programı, aşağıda açıklanan tüm koşulları gerçekleştirecek şekilde dizayn ediniz. 1) X20 başlatma butonuna basılır ise yürüyen bant (Y1)çalışmaya başlayacak ve aynı anda PL4 (Y23) ışık verecek. 2) Robot başlangıç noktasında (X0) ve robot yanındaki masa üzeri boş olduğu olduğu sürece (X1), parça beslemesi (Y0) otomatik olarak gerçekleşecek. 3) Robot başlangıç noktasında (X0) ve iş parçası da masa üzerinde (X1) ise, robot parçayı alarak (Y2) kutuya aktaracak, işlem bitti sinyali (X2) alınca parça alma (Y2) işlemi sonlanacak. 4) X21 butonu sistemi durdurma amacıyla kullanılacak. Diyagramını çizerek uygulayınız. 174
175 E3.C2 175
176 176
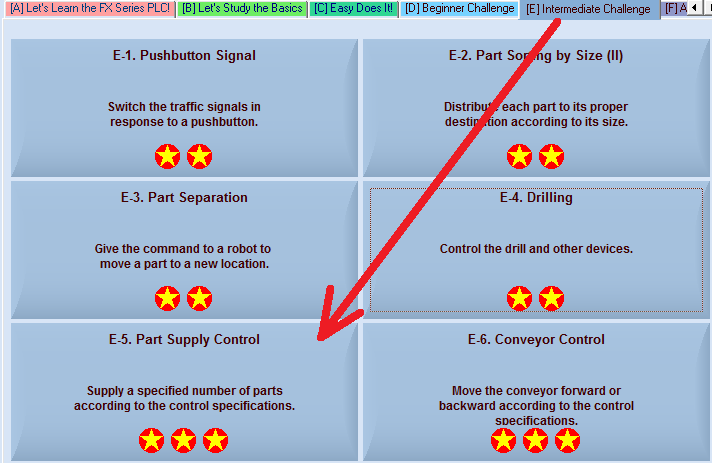
177 177
178 E4.S1 Besleme gözü tarafından gelen iş parçasının delinmesi; 1- X20 başlatma butonuna basıldığı zaman, besleme silosundan yürüyen bant üzerine parça bırakılacak (Y0), X20 bırakıldığı zaman besleme yapılmayacak. 2- Operasyon paneli üzerindeki X24 şalteri ON yapılınca, yürüyen bant (Y1) çalışmaya başlayacak, şalter OFF yapılınca yürüyen bant da duracak. 3- Parça matkabın altında sensörü (X1) parçayı algıladığı anda yürüyen bant duracak. 4- Parça matkabın altında ise ve X21 butonuna basılmış ise, matkap parçayı delecek, matkap, parça delindi (X0) sensörü tarafından otomatik olarak durdurulacak. 5- Matkap parçayı deldikten sonra, otomatik olarak, ya parça doğru delindi (X2) yada parça yanlış delindi (X3) sensörü aktif olacak. (Program tarafından) 6- Delinme işlemi bittikten sonra, X22 butonuna basılır ise, parça yürüyen bant ile hareket ederek kutuya düşecek. Ladder diaygramını çizerek uygulayınız. 178
179 E4.C1 179
180 E4.S2 Besleme gözü tarafından gelen iş parçasının delinmesi; 1- X20 başlatma butonuna basıldığı zaman, besleme silosundan yürüyen bant üzerine parça bırakılacak (Y0), X20 bırakıldığı zaman besleme yapılmayacak. 2- Operasyon paneli üzerindeki X24 şalteri ON yapılınca, yürüyen bant (Y1) çalışmaya başlayacak, şalter OFF yapılınca yürüyen bant da duracak. 3- Parça matkabın altında sensörü (X1) parçayı algıladığı anda yürüyen bant duracak. Matkap parçayı delecek (Y2), matkap, parça deliniyor (X0) sensörü tarafından otomatik olarak durdurulacak. 4- Matkap parçayı deldikten sonra, otomatik olarak, ya parça doğru delindi (X2) yada parça yanlış delindi (X3) sensörü aktif olacak. (Program tarafından) 5- Delinme işlemi biten parça, otomatik olarak yürüyen bant tarafından kutuya atılacak (X5). Yeniden X20 butonuna basılır ise, yeni parça aynı şekilde otomatik olarak delinip kutuya atılacak. Ladder diaygramını çizerek uygulayınız. 180
181 E4.S2 181
182 E4.S3 Besleme gözü tarafından gelen iş parçasının delinmesi; 1- X20 başlatma butonuna basıldığı zaman, besleme silosundan yürüyen bant üzerine parça bırakılacak (Y0), X20 bırakıldığı zaman besleme yapılmayacak. 2- Operasyon paneli üzerindeki X24 şalteri ON yapılınca, yürüyen bant (Y1) çalışmaya başlayacak, şalter OFF yapılınca yürüyen bant da duracak. 3- Parça matkabın altında sensörü (X1) parçayı algıladığı anda yürüyen bant duracak. Matkap parçayı delecek (Y2), matkap, parça delindi (X0) sensörü tarafından otomatik olarak durdurulacak. 4- Matkap parçayı deldikten sonra, otomatik olarak, ya parça doğru delindi (X2) yada parça yanlış delindi (X3) sensörü aktif olacak. (Program tarafından) 5- Delinme işlemi biten parça, otomatik olarak yürüyen bant tarafından kutuya atılacak (X5). Kutuya atma işlemi gerçekleştiği anda otomatik olarak yeni iş parçası yürüyen banda konulacak. Ladder diaygramını çizerek uygulayınız. 182
183 E4.C3 183
184 E4.S4 Bir önceki soruya aşağıda istenilenleri ekleyiniz; Eğer kutuya atılan parça sayısı 10 dan az ise yeşil lamba (Y23) ışık versin, parça sayısı 20 den fazla ise kırmızı lamba (Y20) ışık versin, eğer atılan parça sayısı bu iki sayı arasında ise, mavi ve sarı lambalar (Y21, Y22) birlikte ışık versinler. Uygulayınız. 184
185 E4.C4 185
186 186
187 187
188 E5.S1 Aşağıdaki şartların hepsini gerçekleştirecek programı yapınız. 1- X24 şalteri ON yapılınca yürüyen bant (Y1) çalışmaya başlayacak, OFF yapılınca duracak. 2- Operasyon paneli üzerindeki X20 girişi ON yapılınca, eğer robot başlangıç pozisyonunda ise (X0), parça beslemesi (Y0) yapacak, robot başlangıç pozisyonundan ayrıldığı zaman besleme komutu resetlenecek. 3- Turuncu besleyici içerisinde bulunan, yürüyen bant üzerindeki kutuyu algılayan sensör (X1) ON olduğu zaman yürüyen bant duracak. 4- Turuncu kutu içerisine 5 adet portakal bırakılacak (Y2), beş portakal içeren kutu sağa doğru ilerleyecek. (Portakalın bırakıldığını, X2 sensörü ile algılayacağız). Diyagramını çizerek uygulayınız. 188
189 E5.C1 189
190 E5.S2 Aşağıdaki şartların hepsini gerçekleştirecek programı yapınız. 1- X24 şalteri ON yapılınca yürüyen bant (Y1) çalışmaya başlayacak, OFF yapılınca duracak. 2- Operasyon paneli üzerindeki X20 girişi ON yapılınca, eğer robot başlangıç pozisyonunda ise (X0), parça beslemesi (Y0) yapacak, robot başlangıç pozisyonundan ayrıldığı zaman besleme komutu resetlenecek. 3- Turuncu besleyici içerisinde bulunan, yürüyen bant üzerindeki kutuyu algılayan sensör (X1) ON olduğu zaman yürüyen bant duracak. 4- Turuncu kutu içerisine 5 adet portakal bırakılacak (Y2), beş portakal içeren kutu sağa doğru ilerleyecek. (Portakalın bırakıldığını, X2 sensörü ile algılayacağız.) Portakal kutusu yürüyen bandı terk edince yeni boş kutunun otomatik olarak yüklenmesini istiyoruz. Diyagramını çizerek uygulayınız. 190
191 E5.C2 191
192 E5.S3 Yukarıdaki soruya, aşağıda istenilenleri de ekleyiniz. Yürüyen banttan aşağı düşen koli sayısı, Y20 den itibaren Y23 e kadar olan lambalar üzerinde binary olarak gösterilsin(1 koli düştü ise Y20, 2 koli düştü ise Y21, 3 koli düştü ise Y20 ve Y21 ), düşen koli sayısı 15 olunca, robot başka parça yüklemesi yapmasın. Yeniden X20 başlatma butonuna basılır ise, devre tekrar çalışabilsin.(devrenin tamamında sadece 1 sayıcı kullanınız.) Uygulayınız. 192
193 E5.C3 193
194 194
195 195
196 E6.S1 Kontrol özelliğine göre yürüyen bandı ileri yada geriye doğru çalıştırma, 1- Operasyon paneli üzerindeki X20 girişi ON yapıldığında, silodan yürüyen banda parça beslemesi (Y10) gerçekleşecek. Giriş OFF olduğunda besleme kesilecek. 2- X21 girişi ON yapıldığında, yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11) ON olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10) ON olduğunda parça burada 5 saniye bekleyecek ve tekrar ileri yönde çalışacak. İleri yönde çalışma, X12 durdurma sensörünü görünce sonlanacak. Diyagramı çizerek uygulayınız. 196
197 E6.C1 197
198 E6.S2 Kontrol özelliğine göre yürüyen bandı ileri yada geriye doğru çalıştırma, 1- Operasyon paneli üzerindeki X20 girişi ON yapıldığında, silodan yürüyen banda sadece bir adet parça beslemesi (Y10) gerçekleşecek. Giriş tekrar aktif edilse bile başka parça beslemesi yapılamayacak. 2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11) ON olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10) ON olduğunda duracak ve tekrar ileri yönde çalışacak. Bu şekildeki çalışma, X21 durdurma girişi ON oluncaya kadar devam edecek. Diyagramı çizerek uygulayınız. 198
199 E6.C2 199
200 E6.S2b Yukarıdaki soruya aşağıda istenileni ekleyiniz. Sistem bir kez çalıştırılıp durdurulduktan sonra, ikinci kez çalıştırma butonuna basılacak olursa, yürüyen banda ikinci parça düşmesin, önceki düşen parça sağa sola çalışmaya devam etsin. Uygulayınız. 200
201 E6.C2b 201
202 E6.S2c Yukarıdaki soruya aşağıda istenileni ekleyiniz. Çalışan sistem durdurma butonu ile durdurulduktan sonra yeniden çalışma butonuna basılacak olur ise, yürüyen bant hangi yöne çalışırken durdurulmuş ise, aynı yöne çalışmaya devam etsin. Uygulayınız. 202
203 E6.C2c 203
204 E6.S3 Aşağıdaki şartların hepsini gerçekleştirecek programı oluşturunuz. 1- Operasyon paneli üzerindeki X20 girişi ON yapıldığında, silodan yürüyen banda sadece bir adet parça beslemesi (Y10) gerçekleşecek. Giriş tekrar aktif edilse bile başka parça beslemesi yapılamayacak. 2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11) ON olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10) ON olduğunda duracak ve tekrar ileri yönde çalışacak. Bu şekildeki çalışma, X21 durdurma girişi ON oluncaya kadar devam edecek. 3- Parçanın ileri yönde çalışma sayısı, sürekli olarak gösterge (Y0-Y7) üzerinde görülecek. 4- İleri yön ile birlikte kırmızı lamba(y20) ve geri yön ile birlikte de yeşil lamba (Y23) ışık versin. Diyagramı çizerek uygulayınız. 204
205 E6.C3 205
206 E6.S4 Aşağıdaki şartların hepsini gerçekleştirecek programı oluşturunuz. 1- Operasyon paneli üzerindeki X20 girişi ON yapıldığında, silodan yürüyen banda sadece bir adet parça beslemesi (Y10) gerçekleşecek. Giriş tekrar aktif edilse bile başka parça beslemesi yapılamayacak. 2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11) ON olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10) ON olduğunda duracak ve tekrar ileri yönde çalışacak. Bu şekildeki çalışma, X21 durdurma girişi ON oluncaya kadar devam edecek. 3- Parçanın ileri yönde çalışma sayısı, sürekli olarak gösterge (Y0-Y7) üzerinde görülecek. 4- İleri yön ile birlikte kırmızı lamba(y20) ve geri yön ile birlikte de yeşil lamba (Y23) ışık versin. 5- İleri yöndeki çalışma sayısı 10 değerine ulaştığı anda, iş parçası sağ taraftan aşağıya atılsın, hemen silodan yeni bir parça otomatik olarak bant üzerine insin, bu parça da 10 kez sağ yapınca aşağı atılsın. Çalışma bu şekilde sürekli olsun. Diyagramı çizerek uygulayınız. 206
207 E6.C4 207
208 E6.S5 Aşağıdaki şartların hepsini gerçekleştirecek programı oluşturunuz. 1- Operasyon paneli üzerindeki X20 girişi ON yapıldığında, silodan yürüyen banda sadece bir adet parça beslemesi (Y10) gerçekleşecek. Giriş tekrar aktif edilse bile başka parça beslemesi yapılamayacak. 2- Aynı anda yürüyen bant ileri yönde (Y11) çalışacak, sağ sınır anahtarı (X11) ON olduğunda yürüyen bant durup geriye doğru (Y12) çalışacak, sol sınır anahtarı (X10) ON olduğunda duracak ve tekrar ileri yönde çalışacak. Bu şekildeki çalışma, X21 durdurma girişi ON oluncaya kadar devam edecek. 3- Parçanın ileri yönde çalışma sayısı, sürekli olarak gösterge (Y0-Y7) üzerinde görülecek. 4- İleri yön ile birlikte kırmızı lamba(y20) ve geri yön ile birlikte de yeşil lamba (Y23) ışık versin. 5- İleri yöndeki çalışma sayısı, X0-X7 girişlerine bağlı olan dijital anahtar ile ayarlanan değere ulaştığı anda, iş parçası sağ taraftan aşağıya atılsın, hemen silodan yeni bir parça otomatik olarak bant üzerine insin, bu parça da aynı sayıda sağ yapınca aşağı atılsın. Çalışma bu şekilde sürekli olsun. Diyagramı çizerek uygulayınız. 208
209 E6.C5 209
210 E6.S6 Aşağıdaki şartları gerçekleştirecek programı dizayn ediniz. 1- X20 başlatma butonuna basılınca, silodan yürüyen banda iş parçası bırakılacak. 2- Aynı anda yürüyen bant ileri yönde hareket edecek, X12 (stop sensör) parçayı algılayınca yürüyen bant 2 saniye süreliğine duracak ve süre sonunda yeniden sağa hareket edecek. 3- X11 (sağ sınır anahtarı) parçayı algıladığında yürüyen bant duracak, 2 saniye sonra geri yönde çalışacak. 4- Geri yönde giderken, parça stop sensör tarafından algılanınca yürüyen bant 2 saniyeliğine duracak, süre sonunda yeniden geri yönde çalışmaya devam edecek. 5- Sol sınır anahtarı (X10) parçayı algıladığında yürüyen bant 2 saniyeliğine tekrar duracak ve süre sonunda tekrar ileri yönde çalışmaya devam edecek. Sistemin çalışması bu şekilde sürekli devam edecek. Uygulayınız. 210
211 E6.C6 211
212 212
213 E6.S7 X20 başlatma butonuna basılır basılmaz yeşil lamba (Y23) ışık versin, lambanın ışığı, dijital anahtarda (X0 X7) yazılan süre (saniye) kadar sonra kendiliğinden sönsün. Uygulayınız. 213
214 E6.C7 214
215 E6.S8 X21 butonuna basılınca yeşil lamba (Y23) ışık versin, lambanın yanma süresi, saniye olarak X20 butonuna basma süresi ile önceden ayarlansın. (Zamanlayıcının değeri, X20 butonuna basma süresidir) Yeşil lamba, ayarlanan sürenin sonunda kendiliğinden sönsün. Lambanın kaç saniye ışık vereceği, X20 öğretme butonuna basılırken göstergeye de (Y0-Y7) aktarılsın, orada sabit kalsın. (Yeniden bir süre öğretilinceye kadar) Uygulayınız. 215
216 E6.C8 216
217 E6.S9 Dijital anahtardan (X0 X7) girilen değerlerden, büyük olan, gösterge (Y0 Y7) üzerindeki onlar basamağında, küçük olan ise birler basamağında gösterilsin. Uygulayınız.,,
218 E6.C9 218
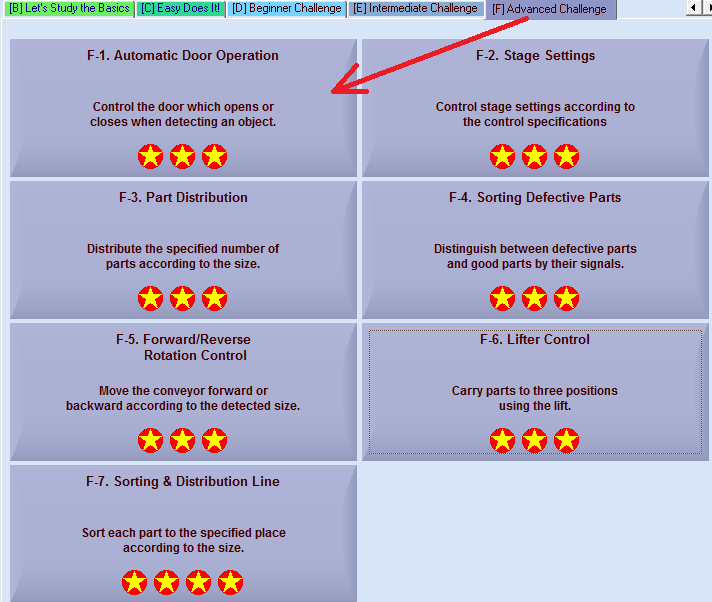
219 219
220 E6.S10 X20 başlatma butonuna basıldığı anda, X0-X3 arasına bağlı olan dijital anahtardaki değeri, X4-X7 arasına bağlı olan dijital anahtardaki değere bölüp, sonucun tam kısmını, Y0-Y3 arasına bağlı olan, kalan kısmını ise Y4-Y7 arasına bağlı olan yedi elemanlı göstergede göstermek istiyoruz. Diyagramını çizerek uygulayınız. 220
221 E6.C10 221
222 E6.S11 X20 başlatma butonuna basıldığı anda, X0-X3 arasına bağlı olan dijital anahtardaki değeri, X4-X7 arasına bağlı olan dijital anahtardaki değere bölüp, sonucun tam ve kalan kısımlarını 2 şer saniye aralıklarla Y0-Y7 arasında bağlı olan 7 elemanlı göstergede gösterecek olan programı yapınız. Sonucun tam kısmı gösterilirken yeşil lamba (Y23), kalan kısmı gösterilirken de kırmızı lamba (Y20) ışık versin. Uygulayınız. 222
223 E6.C11 223
224 E6.S12 X20 Başlatma butonuna basılır basılmaz yeşil lamba (Y23) ışık versin, 15 saniye sonra da bu lambanın ışığı kendiliğinden sönsün. 7 elemanlı gösterge üzerinde, 15 den geriye doğru lambanın kalan yanma süresi her saniye birer birer azaltılarak gösterilsin, göstergedeki değer sıfır olunca lamba da sönsün. Diyagramını çizerek uygulayınız. 224
225 E6.C12 225
226 E6.S13 Trafik ışıkları aşağıda açıklandığı şekilde çalışsın; PLC RUN moduna alınır alınmaz 15 saniye süre ile kırmızı lamba (Y20) ışık versin, süre sonunda kırmızı sönüp 5 saniye süre ile sarı lamba (Y22) ışık versin, süre sonunda bu lamba da sönüp 20 saniye süre ile yeşil lamba (Y23) ışık versin. Süre bitiminde işlem başa dönsün. Her bir lambanın ışık verme süresi, toplam süreden geriye doğru her saniye birer birer düşerek 7 elemanlı gösterge üzerinde gösterilsin. Uygulayınız. 226
227 E6.C13 227
228 228
229 229
230 F1.S1 Aşağıdaki şartları gerçekleştirecek programı dizayn ediniz. 1- Araba kapıya yaklaşırken giriş sensörü (X2) aktif olduğu anda kapı açılacak (Y0), kapı yukarıya tam olarak açılınca (Üst sınır anahtarı X1) kapının açılma işlemi sonlandırılacak ve kapı yukarıda bekleyecek. 2- Araba dışarıya tamamen çıktıktan sonra (X3) kapı otomatik olarak aşağıya inecek (Y1), tamamen aşağıya inince (Alt sınır anahtarı X0), aşağı indirme işlemi sonlandırılacak ve kapı yeniden araba gelinceye kadar aşağıda bekleyecek. 3- Kapı aşağıya yada yukarıya hareket halinde iken, buzzer (Y7) alarm verecek. 4- Araba, giriş sensörü ile çıkış sensörü arasında olduğu sürece, ışık (Y6) çalışacak. (Işık, giriş sensörü algılar algılamaz çalışacak, araba çıkış sensörünü tamamen terk edince sönecek.) 5- Operasyon paneli üzerindeki ışıklardan Stop (Y10), kapı hareket etmezken; Door in motion (Y11), kapı yukarı yada aşağı yönde hareket halinde iken; Door Light, araba sensörler arasında iken (giriş ve çıkış); Open, kapı açık iken (X1) ışık verecek. 6- Door up (X10) butonuna basılır ise kapı açılacak, Door down (X11) butonuna basılır ise kapı kapanacak. Ladder diyagramını çizerek uygulayınız. 230
231 F1.C1 231
232 F1.S2 Yukarıdaki soruya aşağıda istenileni ekleyiniz. Kapıyı el ile açma kapama butonları (X10, X11) kullanılırken, kapı sonuna kadar açılmak isteniyorsa, butona sürekli basılması gereksin. İstediğimiz durumda kapıyı yarım açık şekilde de bırakabilelim. Diyagramını çizerek uygulayınız. 232
233 F1.C2 233
234 234
235 235
236 F2.S1 Aşağıdaki şartları gerçekleştirecek programı dizayn ediniz. 1- Eğer perdeler kapalı ise (X0, X3) ve sahne aşağıda ise (X7), başlatma butonuna (X16) basılır basılmaz buzzer (Y5) alarm vermeye başlayacak, 5 saniye sonra alarmı kesilecek ve perde açılmaya (Y0) başlayacak. Perde, her iki yönde (X2, X5) de tamamen açılınca duracak. 2- Perdeler tamamen açıldıktan sonra, sahne yukarıya çıkacak (Y2), tamamen yukarı çıktığı anda (X6) duracak. 3- X17 Son butonuna basıldığı anda perdeler kapanacak (Y1), tamamen kapanınca (X0, X3) duracak. Uygulayınız. 236
237 F2.C1 237
238 238
239 239
240 F3.S1 Aşağıdaki işlemleri gerçekleştirecek programı oluşturunuz. 1- X20 butonuna basıldığı anda robot başlangıç noktasında ise (X0), parça beslemesini (Y0) gerçekleştirecek. Parça beslemesi, robot parçayı yürüyen banda koyup yeniden başlama noktasına gelmesi ile birlikte sonlandırılacak. 2- X24 şalteri ON yapıldığı anda tüm yürüyen banlar (Y1, Y2, Y3, Y4) ileri yönde çalışmaya başlayacak, bu şalter OFF yapılırsa tüm yürüyen bantlar duracak. 3- Büyük, orta ve küçük parçalar, giriş sensörleri olan X1 (üst), X2 (orta) ve X3(alt) seviye sensörleri tarafından algılanacak ve ilgili kutuya gönderilecek. 4- Eğer robotun koyduğu parça büyük ise, en sağdaki kutuya (L) gönderilecek, orta ise, ortadaki kutuya (M) gönderilecek, küçük ise en soldaki kutuya (S) gönderilecek. Bunun için, parçanın büyüklüğüne göre, parça ilgili kutu önüne gelince ve sensör tarafından algılanınca (X10, X11, X12) yürüyen bantlar durdurulacak, itici (Y5, Y6, Y7) ile parça kutu içerisine itilecek, itme işleminden sonra itici resetlenecek. Ladder diyagramını çizerek uygulayınız. 240
241 F3.C1 241
242 242
243 243
244 F3.S2 Yukarıdaki soruya aşağıda istenilenleri ekleyiniz. 1- Robot parça beslemesini, başlangıç noktasında ve yürüyen bantlar çalışmaya başlamış ise yapabilsin. 2- İlk besleme yapıldıktan sonra, diğer beslemeler otomatik olarak gerçekleşsin. Besleme işlemini otomatik olarak yaparken, parçaların boyutunu algılayan sensör grubunu kullanın. Parça bu sensör grubundan geçer geçmez, otomatik besleme işlemi devreye girsin. Ladder diyagramını çizerek uygulayınız. 244
245 F3.C2 245
246 F3.S3 Aşağıdaki şartları gerçekleştirecek programı yapınız. 1- X20 başlatma butonuna basılır basılmaz tüm yürüyen bantlar çalışmaya başlayacak, aynı anda robot (eğer başlangıç noktasında ise) parça beslemesi yapacak. Parça, yükseklik algılama sensöründen geçtikten sonra, robot otomatik olarak yeni iş parçasını yürüyen banda koyacak. 2- Robot tarafından konulan iş parçası eğer büyük ise, L (Large) kutusu önüne gelince, bu kutu önündeki yürüyen bant duracak, iş parçası bu kutuya itilecek ve parça kutuya düşünce yürüyen bant tekrar harekete geçecek. Eğer parça orta ise M (Medium) kutusu önüne gelince, bu kutu önündeki yürüyen bant duracak, iş parçası bu kutuya itilecek ve parça düşünce yürüyen bant tekrar hareket edecek. Eğer parça küçük ise, S (Small) kutusu önüne gelince, bu kutu önündeki yürüyen bant duracak, parça bu kutuya itilecek ve parça düşünce yürüyen bant tekrar harekete geçecek. 3- L kutusuna atılan parça sayısı 3, M kutusuna atılan parça sayısı 4 ve S kutusuna atılan parça sayısı 5 olduktan sonra (hangisi önde dolar ise) bu kutuya yeni parça atılmayacak, yürüyen bandın sonundan yere düşmesi sağlanacak. Tüm kutular istenilen sayıda parça ile doldurulunca yeni parça yüklemesi yapılmayacak, sistem duracak, yeniden başlatma butonu kullanılır ise, sistem aynı şekilde çalışabilecek. 4- Herhangi bir anda X21 durdurma butununa basılır ise, tüm yürüyen bantlar, parça beslemesi, iticiler duracak, yeniden başlatma butonu ile çalışabilecek. Ladder diyagramını çizerek uygulayınız. 246
247 F3.C3 247
248 248
249 249
250 F4.S1 Sağlam ve bozuk parçaların ayrılması, Aşağıdaki şartları gerçekleştiren programı yazınız. 1- X20 başlatma butonuna basılır ise, besleme gözünden (Y0) iş parçası yürüyen bant üzerine bırakılacak. X20 serbest bırakılır ise, besleme duracak. 2- Operasyon paneli üzerindeki X24 şalteri ON yapıldığı zaman yürüyen bantlar (Y1, Y3) çalışmaya başlayacak, OFF yapıldığı zaman duracak. 3- Matkap içerisindeki iş parçasını algılayan sensör (X1), iş parçasını algıladığı anda yürüyen bant (Y1) duracak. 4- X21 delme başlatma butonuna basılır ise, delme işlemi (Y2) başlayacak, delme bitti sinyali alınınca (X0) delme işlemi sonlandırılacak. 5- Matkap delme işlemini bitirince, delme doğru yapıldı ise (X2), yanlış yapıldı ise (X3) sinyalini otomatik olarak üretilecek. (Program tarafından yapılan işlem) (Matkap, işlemin ortasında sonlandırılamaz, matkap, iş parçası üzerine birden çok delik delmiş ise bu parça bozuk demektir.) 6- Delinen parça bozuk ise, bozuk parça kutusu önündeki sensör (X10) tarafından algılanınca, yürüyen bant (Y3) durdurulacak ve itici ile (Y5) bozuk parça kutusu (DEFECTİVE) içerisine itilecek. İtme işlemi sonunda yürüyen bant tekrar hareket edecek. 7- Delinen parça sağlam ise, her iki yürüyen banttan da düz olarak geçecek ve sağlam (OK) kutusuna atılacak. 8- İşlem sonunda istenir ise yeniden parça konulup tekrar delme işlemi yapılabilecek. Ladder diyagramını çizerek uygulayınız. 250
S71200 PLC UYGULAMA ÖRNEKLERİ
 S71200 PLC UYGULAMA ÖRNEKLERİ 1Örnek: Bir matbaacıda kitapların sayfa kenarlarındaki fazla kağıtları kesmek için bir giyotin makası kullanılacaktır. Bu makasın hareket etmesi çift taraflı pnömatik silindir
S71200 PLC UYGULAMA ÖRNEKLERİ 1Örnek: Bir matbaacıda kitapların sayfa kenarlarındaki fazla kağıtları kesmek için bir giyotin makası kullanılacaktır. Bu makasın hareket etmesi çift taraflı pnömatik silindir
UYGULAMA 1 SİEMENS S PLC UYGULAMALARI-2. Mühürleme Elemanları:
 Mühürleme Elemanları: UYGULAMA 1 Mühürlemenin başlayacağı bir bitlik adres yazılır S Başlangıç adresi dahil mühürlenecek adres adedi Resetlemenin başlayacağı bir bitlik adres yazılır R Başlangıç adresi
Mühürleme Elemanları: UYGULAMA 1 Mühürlemenin başlayacağı bir bitlik adres yazılır S Başlangıç adresi dahil mühürlenecek adres adedi Resetlemenin başlayacağı bir bitlik adres yazılır R Başlangıç adresi
UYGULAMA 1 24V START CPU V LO. Verilen PLC bağlantısına göre; START butonuna basıldığında Q0.0 çıkışını aktif yapan PLC programını yazınız.
 UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
ZAMANLAYICILAR S de, 4 farklı zamanlayıcı vardır.
 ZAMANLAYICILAR S7-1200 de, 4 farklı zamanlayıcı vardır. 1.Timer Pals: (TP): Girişe (IN) gelen sinyalle beraber çıkış (Q) «1» olur. Ayarlanan süre (PT) sonunda çıkış (Q) «0» olur. Ayarlanan süre (PT) dolmadan,
ZAMANLAYICILAR S7-1200 de, 4 farklı zamanlayıcı vardır. 1.Timer Pals: (TP): Girişe (IN) gelen sinyalle beraber çıkış (Q) «1» olur. Ayarlanan süre (PT) sonunda çıkış (Q) «0» olur. Ayarlanan süre (PT) dolmadan,
BÖLÜM 5 S_BĐT. Komut listesi (STL) Network 1 LD I0.0 S Q0.0, 1
 Network 1 LD I0.0 S Q0.0, 1") BÖLÜM 5 ET VE EET ÖLELEĐ : PLC teknolojisinde sürekli çalışmayı sağlamak için mühürleme (kilitleme) pek kullanılmaz. ürekli çalışma başka bir yöntemle çözülür. Bu da ET ve EET tekniğidir. Çıkışın girişe
BÖLÜM 5 ET VE EET ÖLELEĐ : PLC teknolojisinde sürekli çalışmayı sağlamak için mühürleme (kilitleme) pek kullanılmaz. ürekli çalışma başka bir yöntemle çözülür. Bu da ET ve EET tekniğidir. Çıkışın girişe
UYGULANMIŞ ÖRNEK PLC PROGRAMLARI
 UYGULANMIŞ ÖRNEK PLC PROGRAMLARI Örnek 1: Örneğ e başlamadan önce CPU yu 221 seçmeliyiz.(bu işlem program sonunda da yapılabilir.) Girişler I 0.0 dan I 0.5 e, Çıkışlar Q 0.0 dan Q 0.3 e kadardır. Amacı
UYGULANMIŞ ÖRNEK PLC PROGRAMLARI Örnek 1: Örneğ e başlamadan önce CPU yu 221 seçmeliyiz.(bu işlem program sonunda da yapılabilir.) Girişler I 0.0 dan I 0.5 e, Çıkışlar Q 0.0 dan Q 0.3 e kadardır. Amacı
OTOMASYON ATÖLYESİ TEMEL PLC SORULARI
 Soru1 ) Start butonuna bastığımız anda M1 motoru, start butonundan elimizi çektiğimiz anda M2 motoru çalışacak. Stop butonuna bastığımız anda ise iki motor birden duracaktır. M1 Q0.0 M2 Q0.1 OTOMASYON
Soru1 ) Start butonuna bastığımız anda M1 motoru, start butonundan elimizi çektiğimiz anda M2 motoru çalışacak. Stop butonuna bastığımız anda ise iki motor birden duracaktır. M1 Q0.0 M2 Q0.1 OTOMASYON
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
GW420. Kurutma Makinesi Bilgisayar Kullanım Klavuzu. Lütfen kurulumdan önce dikkatle okuyunuz.
 GW420 Kurutma Makinesi Bilgisayar Kullanım Klavuzu Lütfen kurulumdan önce dikkatle okuyunuz. KATALOG Bölüm 1 Klavye Arayüzü... 1 Bölüm 2 Çalışma Talimatı... 2 1. Sistem Başlatma... 2 2. Parametre Ayarları...
GW420 Kurutma Makinesi Bilgisayar Kullanım Klavuzu Lütfen kurulumdan önce dikkatle okuyunuz. KATALOG Bölüm 1 Klavye Arayüzü... 1 Bölüm 2 Çalışma Talimatı... 2 1. Sistem Başlatma... 2 2. Parametre Ayarları...
SIGNO BARİYER BAĞLANTI ŞEMASI
 SIGNO BARİYER BAĞLANTI ŞEMASI Mekanik Montaj 1) Bariyerle gelen malzemeleri resim 1 de görüldüğü gibi kontrol edin. 2) Bariyerin kolunun sağa mı yoksa sola mı çalışacağını belirleyip yay yönünü kolun
SIGNO BARİYER BAĞLANTI ŞEMASI Mekanik Montaj 1) Bariyerle gelen malzemeleri resim 1 de görüldüğü gibi kontrol edin. 2) Bariyerin kolunun sağa mı yoksa sola mı çalışacağını belirleyip yay yönünü kolun
Şekil 4.12 : Klasik kumanda devresi. Ladder devresi : Network1. Network 2. Network 3 I0.0
 4.8 - Örnek problemler : Örnek 1 : Bir sistemde, 2 adet motor çalıştırılacaktır. Start butonuna ilk defa basıldığında sadece 1 nolu motor devreye girecek ve sürekli çalışacaktır. 1. motor çalışmaya başladıktan
4.8 - Örnek problemler : Örnek 1 : Bir sistemde, 2 adet motor çalıştırılacaktır. Start butonuna ilk defa basıldığında sadece 1 nolu motor devreye girecek ve sürekli çalışacaktır. 1. motor çalışmaya başladıktan
Cybelec-PCSS Kullanma Kılavuzu (LZS-004 Takılı Sistemler için)
") Adım Yapılan İşlem Normal Çalışmada Çıkacak Mesajşlar Güç Verme Pompayı Başlatma İlk Hareket PCSS Hata Tanımlama Kontrolleri Yapılır IsaGraf Kullanıcı Uygulaması Başlatılır PCSS Güvenlik Fonksiyonları
Adım Yapılan İşlem Normal Çalışmada Çıkacak Mesajşlar Güç Verme Pompayı Başlatma İlk Hareket PCSS Hata Tanımlama Kontrolleri Yapılır IsaGraf Kullanıcı Uygulaması Başlatılır PCSS Güvenlik Fonksiyonları
UYGULAMA 1 SİEMENS S PLC UYGULAMALARI CPU-1214C
 UYGULAMA 1 +24V 0V I1.5 I1.4 I1.3 I1.2 I1.1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 START CPU-1214C Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 +24V L0 0V Verilen PLC bağlantısına göre; START
UYGULAMA 1 +24V 0V I1.5 I1.4 I1.3 I1.2 I1.1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 START CPU-1214C Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 +24V L0 0V Verilen PLC bağlantısına göre; START
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
STF1000 FIRIN KONTROL SİSTEMİ KULLANIM KILAVUZU
 STF1000 FIRIN KONTROL SİSTEMİ KULLANIM KILAVUZU 1 TUŞLAR: START : Program çalıştırmak için kullanılır. STOP: Çalışmakta olan programı sonlandırmak için kullanılır. Stop tuşuna 1 kez basıldığında program
STF1000 FIRIN KONTROL SİSTEMİ KULLANIM KILAVUZU 1 TUŞLAR: START : Program çalıştırmak için kullanılır. STOP: Çalışmakta olan programı sonlandırmak için kullanılır. Stop tuşuna 1 kez basıldığında program
Nice RUN1800 RUN2500. Montaj Kılavuzu
 Nice RUN1800 RUN500 Montaj Kılavuzu TR 1 387mm 108mm 400mm 53mm 1 3 5 E 3 8 11 6 7 10 D C F 4 C 1 9 F B A 3 4 5 Max. 40mm 40 0 10 0 50 400 6 7 40 0 10 0 50 400 8 9 1 mm 10 11 1 13 3 8 mm 14 1 3 4 3 15
Nice RUN1800 RUN500 Montaj Kılavuzu TR 1 387mm 108mm 400mm 53mm 1 3 5 E 3 8 11 6 7 10 D C F 4 C 1 9 F B A 3 4 5 Max. 40mm 40 0 10 0 50 400 6 7 40 0 10 0 50 400 8 9 1 mm 10 11 1 13 3 8 mm 14 1 3 4 3 15
WINGO2024-3524 Hızlı Kullanma Kılavuzu
 WINGO2024-3524 Hızlı Kullanma Kılavuzu Mekanik Montaj 1) Motorları kapıların açılma yönüne göre Motor1 i sol kanada, Motor2 yi sağ kanata takınız. Başka türlü bağlantılarda kapıların programlamasında sıkıntı
WINGO2024-3524 Hızlı Kullanma Kılavuzu Mekanik Montaj 1) Motorları kapıların açılma yönüne göre Motor1 i sol kanada, Motor2 yi sağ kanata takınız. Başka türlü bağlantılarda kapıların programlamasında sıkıntı
Semboller : :Açma kapama alteri :Ate leme butonu :Yardımcı röle :Merkez kontak :Normalde açık kontak :Normalde kapalı kontak :UV.
 ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
NİCE TURKİYE. ROBUS 600-1000 Hızlı Kullanma Kılavuzu ELEKTRİKSEL BAĞLANTI
 ELEKTRİKSEL BAĞLANTI ROBUS 600-1000 Hızlı Kullanma Kılavuzu Bağlantı yapılmayan hiçbir yere köprüleme yapmanıza gerek yok. Bağlantilarınızda Nice marka ürünleri kullanmanızda fayda vardır. SMX2 Bağlantısı
ELEKTRİKSEL BAĞLANTI ROBUS 600-1000 Hızlı Kullanma Kılavuzu Bağlantı yapılmayan hiçbir yere köprüleme yapmanıza gerek yok. Bağlantilarınızda Nice marka ürünleri kullanmanızda fayda vardır. SMX2 Bağlantısı
OTOMATİK KLİMA SİSTEMİ
 OTOMATİK KLİMA SİSTEMİ Kabin içerisinin serinletilmesi ve ısıtılması işlemi, klima kontrol ünitesi tarafından kontrol edilir.klima kontrol ünitesi; kendisi ile bağlantılı olan parçaların sürat ve hareketleri
OTOMATİK KLİMA SİSTEMİ Kabin içerisinin serinletilmesi ve ısıtılması işlemi, klima kontrol ünitesi tarafından kontrol edilir.klima kontrol ünitesi; kendisi ile bağlantılı olan parçaların sürat ve hareketleri
OTOMATİK KAPI KONTROL CİHAZI
 OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
Elektromekanik Kumanda Sistemleri / Örnek Uygulamalar
 PROBLEM 31: Uzaktan kumandalı, kesik kesik çalıştırılabilen, devir yönü değiştirilebilen, otomatik λ / yol alan, bir asenkron motorun dinamik frenlenme ile durdurulması ile ilgili güç ve kumanda devresini
PROBLEM 31: Uzaktan kumandalı, kesik kesik çalıştırılabilen, devir yönü değiştirilebilen, otomatik λ / yol alan, bir asenkron motorun dinamik frenlenme ile durdurulması ile ilgili güç ve kumanda devresini
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi):
:") KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
SPIN21KCE Hızlı Kullanma Kılavuzu
 SPIN21KCE Hızlı Kullanma Kılavuzu MEKANİK MONTAJ Montaj yapılacak yerin ölçüleri maksimum olarak; Maksimum Yükseklik Genişlik Seksiyonel kapılar 2,4 m 4,4 m 1 ***Montaj yapılacak yerin konsol bağlantısı
SPIN21KCE Hızlı Kullanma Kılavuzu MEKANİK MONTAJ Montaj yapılacak yerin ölçüleri maksimum olarak; Maksimum Yükseklik Genişlik Seksiyonel kapılar 2,4 m 4,4 m 1 ***Montaj yapılacak yerin konsol bağlantısı
Kullanım Uygulamaları Ön Görünüş. Dijital Ekran Mode Butonu Programlama Tuşu Sıcaklık Değiştirme tuşu ( - ) Sıcaklık Değiştirme tuşu ( +)
 Sıcaklık Değiştirme tuşu ( +)") Kullanım Uygulamaları Ön Görünüş Dijital Ekran Mode Butonu Programlama Tuşu Sıcaklık Değiştirme tuşu ( - ) Sıcaklık Değiştirme tuşu ( +) Dijital Ekran Üzerindeki Bilgiler 1.Manuel Çalışma 2.Çalışma Fonksiyonları
Kullanım Uygulamaları Ön Görünüş Dijital Ekran Mode Butonu Programlama Tuşu Sıcaklık Değiştirme tuşu ( - ) Sıcaklık Değiştirme tuşu ( +) Dijital Ekran Üzerindeki Bilgiler 1.Manuel Çalışma 2.Çalışma Fonksiyonları
ÖZKAY ELEKTRONİK. TK-103 Asansör Kumanda Kartı. KULLANIM KILAVUZU v1.00
 ÖZKAY ELEKTRONİK TK-103 Asansör Kumanda Kartı KULLANIM KILAVUZU v1.00 TK-103 ASANSÖR KUMANDA KARTI KULLANIM KILAVUZU v1.00 ÖZKAY ELEKTRONİK 2008 Eğitim Mahallesi Postane Sokak 13/2 Kadıköy İstanbul Tel
ÖZKAY ELEKTRONİK TK-103 Asansör Kumanda Kartı KULLANIM KILAVUZU v1.00 TK-103 ASANSÖR KUMANDA KARTI KULLANIM KILAVUZU v1.00 ÖZKAY ELEKTRONİK 2008 Eğitim Mahallesi Postane Sokak 13/2 Kadıköy İstanbul Tel
 1 3 2 1 2 A DETAY B B 1 A B 2 DETAY B 1 A 2 1 A 2 5 A 1 6 2 3 4 1 5 2 A 4 3 A 1 2 3 A 2 4 3 1 1 2 5 1 4 3 2 1 A 3 2 Aydınlatma Küpeşte BUTON -Aşağı yukarı butonu -Alarm -Acil Stop -Ekran ve Aşırı yük
1 3 2 1 2 A DETAY B B 1 A B 2 DETAY B 1 A 2 1 A 2 5 A 1 6 2 3 4 1 5 2 A 4 3 A 1 2 3 A 2 4 3 1 1 2 5 1 4 3 2 1 A 3 2 Aydınlatma Küpeşte BUTON -Aşağı yukarı butonu -Alarm -Acil Stop -Ekran ve Aşırı yük
Nice RUN400HS RUN1200HS. Montaj Kılavuzu
 Nice RUN400HS RUN00HS Montaj Kılavuzu TR 387mm 08mm 400mm 53mm 3 5 E 3 8 6 7 0 D C F 4 C 9 F B A 3 4 5 Max. 40mm 40 0 0 0 50 400 6 7 40 0 0 0 50 400 8 9 mm 0 3 3 8 mm 4 3 4 3 5 6 7 LUCYB S.C.A 4V 4W TX
Nice RUN400HS RUN00HS Montaj Kılavuzu TR 387mm 08mm 400mm 53mm 3 5 E 3 8 6 7 0 D C F 4 C 9 F B A 3 4 5 Max. 40mm 40 0 0 0 50 400 6 7 40 0 0 0 50 400 8 9 mm 0 3 3 8 mm 4 3 4 3 5 6 7 LUCYB S.C.A 4V 4W TX
1.2 Bu cihazı kullanan kişinin işinde profesyonel olması gerekir ve sıradan vasıfsız bir çalışan olmamalıdır.
 Vertex MultiCure için Kullanım Talimatları 1.0. Genel Uyarılar: 1.1. Cihaz kullanılmadan önce bu kullanım kılavuzu dikkatle okunur. 1.2 Bu cihazı kullanan kişinin işinde profesyonel olması gerekir ve sıradan
Vertex MultiCure için Kullanım Talimatları 1.0. Genel Uyarılar: 1.1. Cihaz kullanılmadan önce bu kullanım kılavuzu dikkatle okunur. 1.2 Bu cihazı kullanan kişinin işinde profesyonel olması gerekir ve sıradan
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.com ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (3) 65-70 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
www.teknolojikarastirmalar.com ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (3) 65-70 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
AYBEY ELEKTRONİK. MFS Güvenlik Sistemi KULLANIM KILAVUZU F/7.5.5.02.44 R:3
 AYBEY ELEKTRONİK MFS Güvenlik Sistemi KULLANIM KILAVUZU MFS GÜVENLİK SİSTEMİ KULLANIM KILAVUZU SÜRÜM : 1.3 AYBEY ELEKTRONİK LTD. ŞTİ. Fabrika : Merkez Mah. Güney Yanyol Cad. No:17 B/1 Orhanlı-Tuzla-İstanbul
AYBEY ELEKTRONİK MFS Güvenlik Sistemi KULLANIM KILAVUZU MFS GÜVENLİK SİSTEMİ KULLANIM KILAVUZU SÜRÜM : 1.3 AYBEY ELEKTRONİK LTD. ŞTİ. Fabrika : Merkez Mah. Güney Yanyol Cad. No:17 B/1 Orhanlı-Tuzla-İstanbul
FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU
 FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU FP52 kart okuyucusunu; Mody serisi dış kapı buton modülleri ile birlikte kullanılır. Fp52 ile iki farklı röle çıkışı vardır.500 kullanıcıya kadar tanımlanabilir.
FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU FP52 kart okuyucusunu; Mody serisi dış kapı buton modülleri ile birlikte kullanılır. Fp52 ile iki farklı röle çıkışı vardır.500 kullanıcıya kadar tanımlanabilir.
Nice MC424. Kontrol Ünitesi
 Nice MC424 Kontrol Ünitesi TR A E B C F= 30 mm D C B 90 100 100 110 120 130 Model: Wg2024 WG3524 (mm) C B WINGO 2024... 90 110 120 101 110 D (mm): 700 850 E (mm) 100 600 750 110 590 740 120 580 730 130
Nice MC424 Kontrol Ünitesi TR A E B C F= 30 mm D C B 90 100 100 110 120 130 Model: Wg2024 WG3524 (mm) C B WINGO 2024... 90 110 120 101 110 D (mm): 700 850 E (mm) 100 600 750 110 590 740 120 580 730 130
REVİZYON DURUMU. Revizyon Tarihi Açıklama Revizyon No
 REVİZYON DURUMU Revizyon Tarihi Açıklama Revizyon No Hazırlayan: Onaylayan: Onaylayan: Mustafa Arnavut Adem Aköl Kalite Konseyi Başkanı Sinan Özyavaş Kalite Koordinatörü 1/6 1. AMAÇ Bu talimatın amacı
REVİZYON DURUMU Revizyon Tarihi Açıklama Revizyon No Hazırlayan: Onaylayan: Onaylayan: Mustafa Arnavut Adem Aköl Kalite Konseyi Başkanı Sinan Özyavaş Kalite Koordinatörü 1/6 1. AMAÇ Bu talimatın amacı
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
MANUEL KAZAN KONTROL PANELİ
 MANUEL KAZAN KONTROL PANELİ Ürün Mikroişlemci kontrollüdür Teknik Özellikler Çalışma Gerilimi Güç Tüketimi-Bekleme Güç Tüketimi-Çalışma Kontak Akımları Röle Çıkışları Fan Hızı Ayarı Sensörler : 200-240V
MANUEL KAZAN KONTROL PANELİ Ürün Mikroişlemci kontrollüdür Teknik Özellikler Çalışma Gerilimi Güç Tüketimi-Bekleme Güç Tüketimi-Çalışma Kontak Akımları Röle Çıkışları Fan Hızı Ayarı Sensörler : 200-240V
BRC-3R V2.0 BARIYER KONTROL KARTI
 BRC-3R V2.0 BARIYER KONTROL KARTI BRC-3R V2.0 Bariyer kontrol karti asagidaki özelliklere sahiptir; 220V AC 50HZ çalisma voltaji 24V DC besleme girisi 24V DC besleme çikisi 24V DC akü çikisi 2 farkli çalisma
BRC-3R V2.0 BARIYER KONTROL KARTI BRC-3R V2.0 Bariyer kontrol karti asagidaki özelliklere sahiptir; 220V AC 50HZ çalisma voltaji 24V DC besleme girisi 24V DC besleme çikisi 24V DC akü çikisi 2 farkli çalisma
OTOMASYON PROJELERİ VE UYGULAMALARI
 OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Nedir? Otomasyon u kısaca, bir işin insan ile makine arasında paylaşılması şeklinde tanımlayabiliriz. Bir otomasyon sisteminde toplam işin paylaşım yüzdesi
OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Nedir? Otomasyon u kısaca, bir işin insan ile makine arasında paylaşılması şeklinde tanımlayabiliriz. Bir otomasyon sisteminde toplam işin paylaşım yüzdesi
GA 2.0 220V YANAKAYAR BAHÇE KAPISI MOTOR KONTROL KARTI
 GA 2.0 220V YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Kullanım Kitabı V 1.0 Aralık, 2011 KTAL ELEKTRİK :: 220V YANAKAYAR BAHÇE KAPISI MOTROL KTROL KARTI 0 YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Yanakayar
GA 2.0 220V YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Kullanım Kitabı V 1.0 Aralık, 2011 KTAL ELEKTRİK :: 220V YANAKAYAR BAHÇE KAPISI MOTROL KTROL KARTI 0 YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Yanakayar
ELEKTROMEKANİK KUMANDA SİSTEMLERİ ÖRNEK UYGULAMALAR
 ELEKTROMEKANİK KUMANDA SİSTEMLERİ ÖRNEK UYGULAMALAR PROBLEM 1: 3 Fazlı Bir Asenkron Motoru Kesik Kesik Çalıştırmak Çalışma Şekli : Kumanda devresindeki start butonuna basıldığında M kontaktörünün bobinine
ELEKTROMEKANİK KUMANDA SİSTEMLERİ ÖRNEK UYGULAMALAR PROBLEM 1: 3 Fazlı Bir Asenkron Motoru Kesik Kesik Çalıştırmak Çalışma Şekli : Kumanda devresindeki start butonuna basıldığında M kontaktörünün bobinine
SICAK VE SOĞUK ETĐKET VE BOY KESME MAKĐNASI KULLANIM KILAVUZU
 ELITE A.G. JM-110LRE SICAK VE SOĞUK ETĐKET VE BOY KESME MAKĐNASI KULLANIM KILAVUZU ANA EKRAN Makinenin şalteri açıldığında 5 sn boyunca açılış ekranı gelir. Daha sonra ana ekrana geçilir. Bu ekranda yardımcı
ELITE A.G. JM-110LRE SICAK VE SOĞUK ETĐKET VE BOY KESME MAKĐNASI KULLANIM KILAVUZU ANA EKRAN Makinenin şalteri açıldığında 5 sn boyunca açılış ekranı gelir. Daha sonra ana ekrana geçilir. Bu ekranda yardımcı
ÇAMAŞIR MAKİNASI KULLANIM TALİMATI
 1.AMAÇ VE KAPSAM: Bu talimatın amacı çamaşır makinası, güvenli ve etkin çalışmasının yöntemlerini belirlemektir. Bu talimat Yemekhanemiz içerisindeki çamaşır makinasını kapsar. 2.GÖREV VE SORUMLULUK: Temizlik
1.AMAÇ VE KAPSAM: Bu talimatın amacı çamaşır makinası, güvenli ve etkin çalışmasının yöntemlerini belirlemektir. Bu talimat Yemekhanemiz içerisindeki çamaşır makinasını kapsar. 2.GÖREV VE SORUMLULUK: Temizlik
ART S602W Standalone Kart Okuyucu
 ART S602W Standalone Kart Okuyucu ART S602W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
ART S602W Standalone Kart Okuyucu ART S602W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
CAPTAİN-i ver. 5.6 & ve Üzeri RX-6 KULLANIM KİTAPÇIĞI
 1 CAPTAİN-i ver. 5.6 & ve Üzeri RX-6 KULLANIM KİTAPÇIĞI http://www.salimusta.com salim@salimusta.com CAPTAIN-I Alarm paneli Özellikleri 6 programlanabilir bölge 2 bölünme Arayıcı: üç kişisel cep veya ev
1 CAPTAİN-i ver. 5.6 & ve Üzeri RX-6 KULLANIM KİTAPÇIĞI http://www.salimusta.com salim@salimusta.com CAPTAIN-I Alarm paneli Özellikleri 6 programlanabilir bölge 2 bölünme Arayıcı: üç kişisel cep veya ev
BQ300 RF Röle Kontrol Ünitesi. Kullanım Kılavuzu. Doküman Versiyon: 1.1 18.11.2015 BQTEK
 RF Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.1 18.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı Şeması...
RF Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.1 18.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı Şeması...
P R DOX ESPRIT 616,636 ve 646 TUŞ TAKIMLARI KULLANMA KILAVUZU
 P R DOX ESPRIT 616,636 ve 646 TUŞ TAKIMLARI KULLANMA KILAVUZU 1.0 Basit Operasyonlar : ESPRİT 616,636 ve 646 kodlu tuş takımları bütün fonlsiyonları bakımından aynı içeriğe sahip olup, ekranları üzerindeki
P R DOX ESPRIT 616,636 ve 646 TUŞ TAKIMLARI KULLANMA KILAVUZU 1.0 Basit Operasyonlar : ESPRİT 616,636 ve 646 kodlu tuş takımları bütün fonlsiyonları bakımından aynı içeriğe sahip olup, ekranları üzerindeki
SIEMENS LOGO KULLANIMI VE UYGULAMALAR
 SIEMENS LOGO KULLANIMI VE UYGULAMALAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 SIEMENS S7 200 UYGULAMALARI UYGULAMA _1 3 Fazlı Asenkron motorun iki yönde
SIEMENS LOGO KULLANIMI VE UYGULAMALAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 SIEMENS S7 200 UYGULAMALARI UYGULAMA _1 3 Fazlı Asenkron motorun iki yönde
3. Çok kontaklı, tek konumlu röleler 2. Tek kontaklı, çift konumlu röleler
 Mekatronik Mühendisliği DENEY-1: Röle Yük Sürülmesi ve Sürekli Çalışma (Mühürleme) Ön Bilgi: Ø Butonlar Butona basıldığında kontakları konum değiştirir, üzerinden basınç kaldırıldığında yay aracılığı ile
Mekatronik Mühendisliği DENEY-1: Röle Yük Sürülmesi ve Sürekli Çalışma (Mühürleme) Ön Bilgi: Ø Butonlar Butona basıldığında kontakları konum değiştirir, üzerinden basınç kaldırıldığında yay aracılığı ile
BQ301 RF Ekstra Röle Kontrol Ünitesi. Kullanım Kılavuzu. Doküman Versiyon: BQTEK
 RF Ekstra Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.0 30.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı
RF Ekstra Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.0 30.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı
ALC ELEKTRİKLİ PANO TEST PROSEDÜRÜ. 2 Tablo elektriğe bağlanır. OK. 3.1 Üç faz kontrol edilir. L1 L2 L3
 ALC ELEKTRİKLİ PANO TEST PROSEDÜRÜ Tarih: Seri No: 1.1 Tablodaki elemanlar gözle kontrol edilir. OK 1.2 Terminallerdeki kablo bağlantılarının sıkılığı el ile kontrol edilir. OK 2 Tablo elektriğe bağlanır.
ALC ELEKTRİKLİ PANO TEST PROSEDÜRÜ Tarih: Seri No: 1.1 Tablodaki elemanlar gözle kontrol edilir. OK 1.2 Terminallerdeki kablo bağlantılarının sıkılığı el ile kontrol edilir. OK 2 Tablo elektriğe bağlanır.
AYBEY ELEKTRONİK MFR/PSI Güvenlik Sistemi KULLANIM KILAVUZU F/7.5.5.02.44 R:4
 AYBEY ELEKTRONİK MFR/PSI Güvenlik Sistemi KULLANIM KILAVUZU MFR/PSI GÜVENLİK SİSTEMİ KULLANIM KILAVUZU SÜRÜM : 1.4 AYBEY ELEKTRONİK LTD. ŞTİ. Orhanlı Mah. Katip Çelebi Cad. No:17/B Tuzla-İstanbul / Türkiye
AYBEY ELEKTRONİK MFR/PSI Güvenlik Sistemi KULLANIM KILAVUZU MFR/PSI GÜVENLİK SİSTEMİ KULLANIM KILAVUZU SÜRÜM : 1.4 AYBEY ELEKTRONİK LTD. ŞTİ. Orhanlı Mah. Katip Çelebi Cad. No:17/B Tuzla-İstanbul / Türkiye
REVİZYON DURUMU. Revizyon Tarihi Açıklama Revizyon No
 REVİZYON DURUMU Revizyon Tarihi Açıklama Revizyon No Hazırlayan: Onaylayan: Onaylayan: Mustafa Arnavut Adem Aköl Kalite Konseyi Başkanı Sinan Özyavaş Kalite Koordinatörü 1/5 1. AMAÇ Bu talimatın amacı
REVİZYON DURUMU Revizyon Tarihi Açıklama Revizyon No Hazırlayan: Onaylayan: Onaylayan: Mustafa Arnavut Adem Aköl Kalite Konseyi Başkanı Sinan Özyavaş Kalite Koordinatörü 1/5 1. AMAÇ Bu talimatın amacı
MONOFAZE MİKROİŞLEMCİLİ REDRESÖR KULLANIM KILAVUZU
 MONOFAZE MİKROİŞLEMCİLİ REDRESÖR KULLANIM KILAVUZU Cihazı Devreye Almadan Önce Kullanım Kılavuzunu Mutlaka Okuyunuz. CİHAZIN İLK KURULUMU Cihazınızı Koyacağınız Yerin Zemini Düz Olmalıdır. Cihazın Çalışacağı
MONOFAZE MİKROİŞLEMCİLİ REDRESÖR KULLANIM KILAVUZU Cihazı Devreye Almadan Önce Kullanım Kılavuzunu Mutlaka Okuyunuz. CİHAZIN İLK KURULUMU Cihazınızı Koyacağınız Yerin Zemini Düz Olmalıdır. Cihazın Çalışacağı
TEKNİK DOSYA SB KANATLI MAKAS - GÜVENLİK ETİKETLERİ - SEMBOL ANLAMI BULUNDUĞU YER. Sıcak yüzey. Dokunmayınız. Koruyucu giysi giyiniz.
 Sıcak yüzey. Dokunmayınız. Radyatör, hidrolik yağ tankı ve boru hatları Koruyucu giysi giyiniz. paneli bölgesinde Çizme, bot vb. koruyucu ayakkabı kullanınız. paneli bölgesi Dikkat! Tehlike! Elektrik panosu,
Sıcak yüzey. Dokunmayınız. Radyatör, hidrolik yağ tankı ve boru hatları Koruyucu giysi giyiniz. paneli bölgesinde Çizme, bot vb. koruyucu ayakkabı kullanınız. paneli bölgesi Dikkat! Tehlike! Elektrik panosu,
KEYPAD SLIM TGS-01. Kullanım Kitabı V 1.0. Şubat, 2014 KONTAL ELEKTRONİK :: KEYPAD (TGS-01) 0
 0") KEYPAD SLIM TGS-01 Kullanım Kitabı V 1.0 www.kontal.com.tr Şubat, 2014 KONTAL ELEKTRONİK :: KEYPAD (TGS-01) 0 1. KULLANIM ALANI Şifre panelleri, Giriş-Çıkışın kontrollü şekilde yapıldığı her alanda yoğun
KEYPAD SLIM TGS-01 Kullanım Kitabı V 1.0 www.kontal.com.tr Şubat, 2014 KONTAL ELEKTRONİK :: KEYPAD (TGS-01) 0 1. KULLANIM ALANI Şifre panelleri, Giriş-Çıkışın kontrollü şekilde yapıldığı her alanda yoğun
-Örnek Giriş Şeması-
 ASDA-A SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER SON = 01 (SERVO ON) -Örnek Giriş Şeması- Servo sürücünün dijital girişlerinden (P2-10 P2-17) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ASDA-A SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER SON = 01 (SERVO ON) -Örnek Giriş Şeması- Servo sürücünün dijital girişlerinden (P2-10 P2-17) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ELK432-MİKROBİLGİSAYARLI SİSTEM TASARIMI LABORATUAR DENEY FÖYÜ
 ELK432-MİKROBİLGİSAYARLI SİSTEM TASARIMI LABORATUAR DENEY FÖYÜ İÇİNDEKİLER 1. ASENKRON MOTORA YOLVERME YÖNTEMLERİ 2. ASENKRON MOTORA YILDIZ ÜÇGEN YOLVERME 3. OTOMATİK GİRİŞ KAPISININ PLC ÜZERİNDEN KONTROLU
ELK432-MİKROBİLGİSAYARLI SİSTEM TASARIMI LABORATUAR DENEY FÖYÜ İÇİNDEKİLER 1. ASENKRON MOTORA YOLVERME YÖNTEMLERİ 2. ASENKRON MOTORA YILDIZ ÜÇGEN YOLVERME 3. OTOMATİK GİRİŞ KAPISININ PLC ÜZERİNDEN KONTROLU
GLOBAL FIRE EQUIPMENT
 Bağlantılar Zon ve siren kabloların bağlantısını yapmadan önce, zon giriş terminallerine ve siren hattı terminallerine hat sonu dirençlerini takarak panele güç veriniz. Şebeke beslemesini ve akü bağlantısını
Bağlantılar Zon ve siren kabloların bağlantısını yapmadan önce, zon giriş terminallerine ve siren hattı terminallerine hat sonu dirençlerini takarak panele güç veriniz. Şebeke beslemesini ve akü bağlantısını
3. SCADA EKRANINDA EKLENEBİLECEK BUTON ÇEŞİTLERİNİ YAZINIZ. 4. EKRANDA LAMBANIN DURUMUNU GÖREBİLMEK İÇİN EDİTÖR PROGRAMINDAN NE EKLENMELİDİR.
 İŞİN ADI : SCADA İLE CİHAZ KONTROLÜ TEMRİN NO :1 3. LADDER ŞEMASI 4. PLC BAĞLANTISI İŞLEM BASAMAKLARI 1. ÖNCELİKLE İSTENİLEN PROGRAMIN LADDER ŞEMASINI ÜST BOŞLUĞA ÇİZİNİZ. 2. PLC BAĞLANTI ŞEMASINI ÇİZİNİZ.
İŞİN ADI : SCADA İLE CİHAZ KONTROLÜ TEMRİN NO :1 3. LADDER ŞEMASI 4. PLC BAĞLANTISI İŞLEM BASAMAKLARI 1. ÖNCELİKLE İSTENİLEN PROGRAMIN LADDER ŞEMASINI ÜST BOŞLUĞA ÇİZİNİZ. 2. PLC BAĞLANTI ŞEMASINI ÇİZİNİZ.
OTOMATİK KUTULU LCD GÖSTERGELİ MODEL 1 KAZAN KONTROL PANOSU KULLANIM KLAVUZU
 OTOMATİK KUTULU LCD GÖSTERGELİ MODEL 1 KAZAN KONTROL PANOSU KULLANIM KLAVUZU Kazan Kontrol Panosu Ürün Açıklaması Pano AÇ/KAPA tuşundan açılır. Cihaz açıldığında ekran görüntüsü aşağıdaki gibidir. Burada
OTOMATİK KUTULU LCD GÖSTERGELİ MODEL 1 KAZAN KONTROL PANOSU KULLANIM KLAVUZU Kazan Kontrol Panosu Ürün Açıklaması Pano AÇ/KAPA tuşundan açılır. Cihaz açıldığında ekran görüntüsü aşağıdaki gibidir. Burada
010 SİSTEMİ. TEKNOSİSTEM MÜHENDİSLİK - Gazcılar Cad. Anafarta Sok. No:1/A BURSA, Tel:(224)272 37 34 Faks:272 40 19
272 37 34 Faks:272 40 19") 010 SİSTEMİ 1 VOLUMETRİK DAĞITICILAR US ve USM Serisi volumetrik yağlama blokları endirek yağlama için tasarlanmıştır. Pompa basıncının düşmesinden sonra yağlama bloklarına gönderilen yağ yaylar vasıtasıyla
010 SİSTEMİ 1 VOLUMETRİK DAĞITICILAR US ve USM Serisi volumetrik yağlama blokları endirek yağlama için tasarlanmıştır. Pompa basıncının düşmesinden sonra yağlama bloklarına gönderilen yağ yaylar vasıtasıyla
3MK-AFP29 1 Loop 64 Adresli Yangın Algılama Paneli
 3MK-AFP29 1 Loop 64 Adresli Yangın Algılama Paneli 3MK-AFP29 adresli alarm paneli mikroişlemci tabanlı ve SMD teknolojisi ile üretilmiştir. 3MK-AFP29 adresli alarm paneline 64 adet dedektör veya buton
3MK-AFP29 1 Loop 64 Adresli Yangın Algılama Paneli 3MK-AFP29 adresli alarm paneli mikroişlemci tabanlı ve SMD teknolojisi ile üretilmiştir. 3MK-AFP29 adresli alarm paneline 64 adet dedektör veya buton
K- STYLE UZAKTAN KUMANDA KILAVUZU
 K- STYLE UZAKTAN KUMANDA KILAVUZU Lütfen bu kılavuzu uygun şekilde saklayın ve kullanım öncesi dikkatlice okuyun. Sayfa - 1 Ayarı yükseltme : Sıcaklık değerini, Zamanlayıcı zamanını veya Saat zamanını
K- STYLE UZAKTAN KUMANDA KILAVUZU Lütfen bu kılavuzu uygun şekilde saklayın ve kullanım öncesi dikkatlice okuyun. Sayfa - 1 Ayarı yükseltme : Sıcaklık değerini, Zamanlayıcı zamanını veya Saat zamanını
Semboller : :Açma kapama alteri :Ate leme butonu :Yardımcı röle :Merkez kontak :Normalde açık kontak :Normalde kapalı kontak :UV.
 ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ PLC YE HAZIRLIK MODÜLÜ ANKARA 2007 Milli Eğitim Bakanlığı tarafından
T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ PLC YE HAZIRLIK MODÜLÜ ANKARA 2007 Milli Eğitim Bakanlığı tarafından
B603 - B603B SERİSİ FREKANS KONTROLLÜ SÜRÜCÜLER KULLANMA KILAVUZU
 B603 - B603B SERİSİ FREKNS KONTROLLÜ SÜRÜCÜLER KULLNM KILUZU İÇERİK Sayfa BĞLNTI E KULLNIM BİLGİLERİ... 1 1.0 Elektriksel bağlantılar... 1 1.1 na terminal... 1 1.2 Kontrol devresi bağlantıları... 1 2.0
B603 - B603B SERİSİ FREKNS KONTROLLÜ SÜRÜCÜLER KULLNM KILUZU İÇERİK Sayfa BĞLNTI E KULLNIM BİLGİLERİ... 1 1.0 Elektriksel bağlantılar... 1 1.1 na terminal... 1 1.2 Kontrol devresi bağlantıları... 1 2.0
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
AMELİYATHANE PANELİ KULLANIM KILAVUZU
 AMELİYATHANE PANELİ KULLANIM KILAVUZU www.nevakontrol.com REV : TEMMUZ 2013 AMELİYATHANE PANELİ KULLANIM KILAVUZU 1. ANA EKRAN Ana Ekran Ameliyathane panelinin ana ekranı yukarıda görüldüğü gibidir. Bu
AMELİYATHANE PANELİ KULLANIM KILAVUZU www.nevakontrol.com REV : TEMMUZ 2013 AMELİYATHANE PANELİ KULLANIM KILAVUZU 1. ANA EKRAN Ana Ekran Ameliyathane panelinin ana ekranı yukarıda görüldüğü gibidir. Bu
TC. MARMARA ÜNİVERSİTESİ
 TC. MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ EĞİTİMİ BÖLÜMÜ PLC OTOMASYON RAPORU PROBLEM :... İSİM :... SINIF/ŞUBE :... NO :... 28) ELMA KUTULAMA OTOMASYONU ŞekilX1. Elma Kutulama Otomasyonu 1)PROBLEM:
TC. MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ EĞİTİMİ BÖLÜMÜ PLC OTOMASYON RAPORU PROBLEM :... İSİM :... SINIF/ŞUBE :... NO :... 28) ELMA KUTULAMA OTOMASYONU ŞekilX1. Elma Kutulama Otomasyonu 1)PROBLEM:
GEPA. RFD-121 Arıza Gösterge Düzeneği. Kullanma Kılavuzu. Orta Gerilim Yer Altı Şebekeleri İçin Arıza Akımı Gösterge Düzeneği.
 GEPA RFD-121 Arıza Gösterge Düzeneği Orta Gerilim Yer Altı Şebekeleri İçin Arıza Akımı Gösterge Düzeneği Kullanma Kılavuzu www.gepaelk.com İçindekiler 1. Genel... 1 2. Özellikler... 1 3. Bağlantı ve Montaj...
GEPA RFD-121 Arıza Gösterge Düzeneği Orta Gerilim Yer Altı Şebekeleri İçin Arıza Akımı Gösterge Düzeneği Kullanma Kılavuzu www.gepaelk.com İçindekiler 1. Genel... 1 2. Özellikler... 1 3. Bağlantı ve Montaj...
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.com ISSN:304-44 Makine Teknolojileri Elektronik Dergisi 005 () 55-60 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
www.teknolojikarastirmalar.com ISSN:304-44 Makine Teknolojileri Elektronik Dergisi 005 () 55-60 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
MRL 200 - RF Oda Termostatları
 MRL 200 - RF Oda Termostatları MRL 200 - RF oda termostatı, kablosuz bir oda termostatıdır. Bu termostat her türlü ısıtma ve soğutma sistemlerini kontrol etmek için dizayn edilmiş ve her türlü termostatın
MRL 200 - RF Oda Termostatları MRL 200 - RF oda termostatı, kablosuz bir oda termostatıdır. Bu termostat her türlü ısıtma ve soğutma sistemlerini kontrol etmek için dizayn edilmiş ve her türlü termostatın
SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0
 SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0 EKİM, 2010 KONTAL ELEKTRONİK :: SEESAW BARİYER KONTROL KARTI KULLANIM KİTABI V2.0 0 SEESAW 24V DC BARİYER KONTROL KARTI KARTI VE KULLANIMI Seesaw
SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0 EKİM, 2010 KONTAL ELEKTRONİK :: SEESAW BARİYER KONTROL KARTI KULLANIM KİTABI V2.0 0 SEESAW 24V DC BARİYER KONTROL KARTI KARTI VE KULLANIMI Seesaw
ML60XS LCD Ekran Kullanımı
 ML60XS LCD Ekran Kullanımı ML60XS kartının üzerindeki LCD ekranın üst satırında asansörün durum veya hata bilgileri gösterilir. Kabin duruyorken alt satırda ise kabinin bulunduğu durak, haberleşme varlık
ML60XS LCD Ekran Kullanımı ML60XS kartının üzerindeki LCD ekranın üst satırında asansörün durum veya hata bilgileri gösterilir. Kabin duruyorken alt satırda ise kabinin bulunduğu durak, haberleşme varlık
ROAD BLOCKER TEKNİK KLAVUZU
 ROAD BLOCKER TEKNİK KLAVUZU TSH Teknik Servis Hizmetleri A.Ş Road Blocker - 2005 İÇİNDEKİLER Teknik Özellikler 3 Tanım 4 Elektronik Kontrol Panosu 4 Motor Koruma Rölesi 4 Termik Röle 4 Timeout Zaman Rölesi
ROAD BLOCKER TEKNİK KLAVUZU TSH Teknik Servis Hizmetleri A.Ş Road Blocker - 2005 İÇİNDEKİLER Teknik Özellikler 3 Tanım 4 Elektronik Kontrol Panosu 4 Motor Koruma Rölesi 4 Termik Röle 4 Timeout Zaman Rölesi
KAÇAK AKIM RÖLESİ. www.ulusanelektrik.com.tr. Sayfa 1
 DELAB TM-18C KAÇAK AKIM RÖLESİ İÇERİK GENEL / BUTON FONKSİYONLARI.2 PARAMETRE AYARLARI...2 PARAMETRE AÇIKLAMALARI 3 KAÇAK AKIM AYARLARI...3 AÇMA SÜRESİ AYARLARI.3 AŞIRI AKIM AYARLARI...4 ÇALIŞMA SÜRESİ..4
DELAB TM-18C KAÇAK AKIM RÖLESİ İÇERİK GENEL / BUTON FONKSİYONLARI.2 PARAMETRE AYARLARI...2 PARAMETRE AÇIKLAMALARI 3 KAÇAK AKIM AYARLARI...3 AÇMA SÜRESİ AYARLARI.3 AŞIRI AKIM AYARLARI...4 ÇALIŞMA SÜRESİ..4
5-14 KURULUM AYARLARI CALIŞMA FONKSİYONLARI MEKANÝK KURULUM ARIZA DURUMLARI GÜVENLÝK UYARILARI TEKNÝK ÖZELLÝKLER
 3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
AYBEY ELEKTRONİK. MFS Güvenlik Sistemi KULLANIM KILAVUZU F/7.5.5.02.44 R:3
 AYBEY ELEKTRONİK MFS Güvenlik Sistemi KULLANIM KILAVUZU MFS GÜVENLİK SİSTEMİ KULLANIM KILAVUZU SÜRÜM : 1.3 AYBEY ELEKTRONİK LTD. ŞTİ. Fabrika : Merkez Mah. Güney Yanyol Cad. No:17 B/1 Orhanlı-Tuzla-İstanbul
AYBEY ELEKTRONİK MFS Güvenlik Sistemi KULLANIM KILAVUZU MFS GÜVENLİK SİSTEMİ KULLANIM KILAVUZU SÜRÜM : 1.3 AYBEY ELEKTRONİK LTD. ŞTİ. Fabrika : Merkez Mah. Güney Yanyol Cad. No:17 B/1 Orhanlı-Tuzla-İstanbul
MT9505-P/Px, MT9503-P/Px HIZLI KULLANMA KILAVUZU
 MT9505-P/Px, MT9503-P/Px HIZLI KULLANMA KILAVUZU MT9505-P yi seçtiğiniz için teşekkür ederiz. Fırını kullanmaya başlamadan önce Hızlı Kullanma Kılavuzunu dikkatlice okuyunuz. 1.- GÜVENLİK Bu ürün kullanım
MT9505-P/Px, MT9503-P/Px HIZLI KULLANMA KILAVUZU MT9505-P yi seçtiğiniz için teşekkür ederiz. Fırını kullanmaya başlamadan önce Hızlı Kullanma Kılavuzunu dikkatlice okuyunuz. 1.- GÜVENLİK Bu ürün kullanım
röleler için ) 2
 2") ALEV MONİTÖRÜ 03U1 Uygulama 03U1 Alev monitörünün uygulama alanları : Brülörlerde alev denetimi Yangın alarm sistemlerinde Ultra viyole fotoselle ( Bkz. ER 3B ) alev izlemek için. Yüksek gerilim hatlarında
ALEV MONİTÖRÜ 03U1 Uygulama 03U1 Alev monitörünün uygulama alanları : Brülörlerde alev denetimi Yangın alarm sistemlerinde Ultra viyole fotoselle ( Bkz. ER 3B ) alev izlemek için. Yüksek gerilim hatlarında
REV01 13/02/2012 KARTIN ÜZERİNDE BULUNAN MALZEMELER VE ANLAMLARI
 KARTIN ÜZERİNDE BULUNAN MALZEMELER VE ANLAMLARI REV01 13/02/2012 *** Motor ve kontrol ünitesi arasındaki kablo bağlantısı yapılmıştır. Bu bağlantının değiştirilmesi veya kablonun eklenmesi ve kesilmesi
KARTIN ÜZERİNDE BULUNAN MALZEMELER VE ANLAMLARI REV01 13/02/2012 *** Motor ve kontrol ünitesi arasındaki kablo bağlantısı yapılmıştır. Bu bağlantının değiştirilmesi veya kablonun eklenmesi ve kesilmesi
5.1. OTOBAN GEÇİŞ SİSTEMİ
 5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.41. UYDU ANTENİ YÖNLENDİRME OTOMASYON PROJESİ
 5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER. -Örnek Giriş Şeması- SON = 01 (SERVO ON)
") ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER -Örnek Giriş Şeması- SON = 01 (SERVO ON) Servo sürücünün dijital girişlerinden (P2-10 P2-15) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER -Örnek Giriş Şeması- SON = 01 (SERVO ON) Servo sürücünün dijital girişlerinden (P2-10 P2-15) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
E5_C Serisi Hızlı Başlangıç Kılavuzu
 E5_C Serisi Hızlı Başlangıç Kılavuzu İÇİNDEKİLER 1. Giriş 2. Sensör Bağlantı Şekilleri 3. Sensör Tipi Seçimi 4. Kontrol Metodunun PID Olarak Ayarlanması 5. Auto-Tuning Yapılması 6. Alarm Tipinin Değiştirilmesi
E5_C Serisi Hızlı Başlangıç Kılavuzu İÇİNDEKİLER 1. Giriş 2. Sensör Bağlantı Şekilleri 3. Sensör Tipi Seçimi 4. Kontrol Metodunun PID Olarak Ayarlanması 5. Auto-Tuning Yapılması 6. Alarm Tipinin Değiştirilmesi
Ödevlerin her birini birer kişilik gruplar yapacaktır.
 (Son Güncelleme Tarihi: 10 Aralık 2009 Perşembe) Ödevlerin her birini birer kişilik gruplar yapacaktır. Ödevler CD halinde sunulacaktır. (Sınıf, Şube, Öğrenci No, İsim ve Soyisim bilgilerinden oluşacak
(Son Güncelleme Tarihi: 10 Aralık 2009 Perşembe) Ödevlerin her birini birer kişilik gruplar yapacaktır. Ödevler CD halinde sunulacaktır. (Sınıf, Şube, Öğrenci No, İsim ve Soyisim bilgilerinden oluşacak
SBAR HIZLI KULLANIM KILAVUZU
 SBAR HIZLI KULLANIM KILAVUZU ELEKTRİKSEL BAĞLANTI Bağlantılar Giriş Voltaj kablosu Fotosel Kablousu Buton Kablosu Kablo Tipi 3x 1,5 mm² 2x 0,5 mm² 4x 0,25 mm² Maksimum Kablo Boyutu 30 m Daha uzun mesafe
SBAR HIZLI KULLANIM KILAVUZU ELEKTRİKSEL BAĞLANTI Bağlantılar Giriş Voltaj kablosu Fotosel Kablousu Buton Kablosu Kablo Tipi 3x 1,5 mm² 2x 0,5 mm² 4x 0,25 mm² Maksimum Kablo Boyutu 30 m Daha uzun mesafe
İ İŞİ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ
 İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
KULUÇKA PRG. VERSION 14.04 KULLANMA KLAVUZU
 AGRİ ELEKTRİK ELEKTRONİK MAKİNE SAN.TİC.LTD.ŞTİ. KULUÇKA PRG. VERSION 14.04 KULLANMA KLAVUZU EKİM 2014 AKHİSAR 1 ) Kuluçka Makinesi Sürüm 14.04 ın Temel Özellikleri 1. Gelişim makineleri 115200,57600,38400,19200,9600
AGRİ ELEKTRİK ELEKTRONİK MAKİNE SAN.TİC.LTD.ŞTİ. KULUÇKA PRG. VERSION 14.04 KULLANMA KLAVUZU EKİM 2014 AKHİSAR 1 ) Kuluçka Makinesi Sürüm 14.04 ın Temel Özellikleri 1. Gelişim makineleri 115200,57600,38400,19200,9600
Boolean Mantık Tasarımlarının PLC Üzerinde Gerçeklenmeleri A + A = 1...(7) A. A = 0 (8)
 A. A = 0 (8)") Boolean Mantık Tasarımlarının PLC Üzerinde Gerçeklenmeleri A + = A..(3) A +1 = A.. (4) A. =...(5) A. 1 = A...(6) A + A = 1....(7) A. A = (8) Örnek 2.12 Aşağıda verilen mantıksal ifadeleri sadeleştirerek,
Boolean Mantık Tasarımlarının PLC Üzerinde Gerçeklenmeleri A + = A..(3) A +1 = A.. (4) A. =...(5) A. 1 = A...(6) A + A = 1....(7) A. A = (8) Örnek 2.12 Aşağıda verilen mantıksal ifadeleri sadeleştirerek,
KMD99 RF 99 Kanal Kumanda. Kullanım Kılavuzu. Doküman Versiyon: BQTEK
 RF 99 Kanal Kumanda Kullanım Kılavuzu Doküman Versiyon: 1.0 30.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Kumanda Paneli... 4 2.2 Kumanda Tanıtmak...
RF 99 Kanal Kumanda Kullanım Kılavuzu Doküman Versiyon: 1.0 30.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Kumanda Paneli... 4 2.2 Kumanda Tanıtmak...
30 m. 30 m. Loop Dedektör Kablosu 1x1,5 mm² 20 m loop kabosunun döşendikten sonra kalan kısmı Senkronizasyon Kablosu 3x 0,5 mm² 20 m
 M-BAR ve L - BAR HIZLI KULLANIM KILAVUZU Mekanik Montaj Mekanik Montakı yaparken Kullanma kılavuzundaki son sayfalardaki resimlere bakarak kurulumu yapabilirsiniz. YAY AYARI Yay ayarı yapabilmek için aşağıdaki
M-BAR ve L - BAR HIZLI KULLANIM KILAVUZU Mekanik Montaj Mekanik Montakı yaparken Kullanma kılavuzundaki son sayfalardaki resimlere bakarak kurulumu yapabilirsiniz. YAY AYARI Yay ayarı yapabilmek için aşağıdaki
RTX2-LRN BX UZAKTAN KUMANDA
 UZAKTAN KUMANDA delab Deniz Elektronik Laboratuvarı Tel-Fax:06-348 65 Kod öğrenmeli, Toplam 5 röle çıkışlı olarak kullanılabilen Toggle- Momentary ve Latch şeklinde çalışabilen genel amaçlı rf uzaktan
UZAKTAN KUMANDA delab Deniz Elektronik Laboratuvarı Tel-Fax:06-348 65 Kod öğrenmeli, Toplam 5 röle çıkışlı olarak kullanılabilen Toggle- Momentary ve Latch şeklinde çalışabilen genel amaçlı rf uzaktan
OPEN ADVANCE V.1.1 FOTOSELLİ OTOMATİK KAPI SİSTEMİ KULLANMA KILAVUZU
 OPEN ADVANCE V.. FOTOSELLİ OTOMATİK KAPI SİSTEMİ KULLANMA KILAVUZU Adres : SAKARYA. ORG.SAN.BÖL. 964 ADA PARSEL NO: HENDEK/SAKARYA Tel No : 009 064 64 8 0 Fax No : 009 064 64 8 3 www.alkur.com.tr info@alkur.com.tr
OPEN ADVANCE V.. FOTOSELLİ OTOMATİK KAPI SİSTEMİ KULLANMA KILAVUZU Adres : SAKARYA. ORG.SAN.BÖL. 964 ADA PARSEL NO: HENDEK/SAKARYA Tel No : 009 064 64 8 0 Fax No : 009 064 64 8 3 www.alkur.com.tr info@alkur.com.tr
Vertex PolyCure 25 için Kullanım Talimatları. 1.0 Genel Uyarılar:
 Vertex PolyCure 25 için Kullanım Talimatları 1.0 Genel Uyarılar: 1.1 Cihaz kullanılmadan önce bu kullanım kılavuzu dikkatle okunur. 1.2 PolyCure 25 kullanan kişinin işinde profesyonel olması gerekir ve
Vertex PolyCure 25 için Kullanım Talimatları 1.0 Genel Uyarılar: 1.1 Cihaz kullanılmadan önce bu kullanım kılavuzu dikkatle okunur. 1.2 PolyCure 25 kullanan kişinin işinde profesyonel olması gerekir ve
BÖLÜM 12. n1 değeri n2 değerine eşit olduğu zaman kontak kapanır. Kontak kapandığında enerji akışı olur. n1 veya n2 değerleri maksimum 255 olabilir.
 BÖLÜM 2 KAŞILAŞTIMA KOMUTLAI (COMPAE INSTUCTION) Bayt (Byte) eşit karşılaştırma kontağı : ==B Operantlar : VB, IB, QB, MB, SMB, SB, AC, Sabit sayılar değeri değerine eşit olduğu zaman kontak kapanır. Kontak
BÖLÜM 2 KAŞILAŞTIMA KOMUTLAI (COMPAE INSTUCTION) Bayt (Byte) eşit karşılaştırma kontağı : ==B Operantlar : VB, IB, QB, MB, SMB, SB, AC, Sabit sayılar değeri değerine eşit olduğu zaman kontak kapanır. Kontak
RQ B SERİSİ REAKTİF GÜÇ RÖLELERİ
 RQ B SERİSİ REAKTİF GÜÇ RÖLELERİ RQ B Serisi reaktif güç röleleri, alçak gerilim elektrik tesislerinin reaktif güç kompanzasyonunda kullanılırlar. Kondansatör gruplarını devreye alan ve çıkaran reaktif
RQ B SERİSİ REAKTİF GÜÇ RÖLELERİ RQ B Serisi reaktif güç röleleri, alçak gerilim elektrik tesislerinin reaktif güç kompanzasyonunda kullanılırlar. Kondansatör gruplarını devreye alan ve çıkaran reaktif
STK6 KURUTMA KONTROL ÜNİTESİ KULLANMA KLAVUZU V1.1
 STK6 KURUTMA KONTROL ÜNİTESİ KULLANMA KLAVUZU V1.1 STK6 KONTROL ÜNİTESİ TUŞ TAKIMI Bir numaralı program tuşu. Birinci programın parametrelerine ulaşmak için kullanılan tuştur. İki numaralı program tuşu.
STK6 KURUTMA KONTROL ÜNİTESİ KULLANMA KLAVUZU V1.1 STK6 KONTROL ÜNİTESİ TUŞ TAKIMI Bir numaralı program tuşu. Birinci programın parametrelerine ulaşmak için kullanılan tuştur. İki numaralı program tuşu.
KLİMA CİHAZI UZAKTAN KONTROL ÜNİTESİ KULLANMA KILAVUZU
 KLİMA CİHAZI UZAKTAN KONTROL ÜNİTESİ KULLANMA KILAVUZU 1 İÇİNDEKİLER GÜVENLİK ÖNLEMLERİ 2 SICAKLIK GERİ ALMA ZAMANLAYICI 10-11 ELEMANLARIN İSİMLERİ 3 ARIZA TESPİTLERİ 12 HAZIRLIK AŞAMALARI 4 ÇALIŞTIRMA
KLİMA CİHAZI UZAKTAN KONTROL ÜNİTESİ KULLANMA KILAVUZU 1 İÇİNDEKİLER GÜVENLİK ÖNLEMLERİ 2 SICAKLIK GERİ ALMA ZAMANLAYICI 10-11 ELEMANLARIN İSİMLERİ 3 ARIZA TESPİTLERİ 12 HAZIRLIK AŞAMALARI 4 ÇALIŞTIRMA