Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ. Ders 2- Uzman Sistemler. Erhan AKDOĞAN, Ph.D.
|
|
|
- Fidan Balcan
- 5 yıl önce
- İzleme sayısı:
Transkript


1 Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 2- Uzman Sistemler Erhan AKDOĞAN, Ph.D.
2 Uzman sistemler Yapay zeka tekniklerinden birisi olan uzman sistemler, tecrübeye ve bilgiye dayalı problemlerin çözümüne etkili çözümler sunar. Uzman sistemler hem makine hem de insan müdahalesini gerektiren uygulamalarda kullanılır.
3 Uzman Sistemlerin Yapısı ve Özellikleri Bilgi Tabanı (knowledge base) Çalışma Alanı (working storage) Çıkarım Mekanizması (muhakeme ünitesi) Kullanıcı arayüzü (user interface) Bilgi Edinme Ünitesi
4 Bir uzman sistemin elemanları Kullanıcı Uzman Kişi Kullanıcı Arayüzeyi Arayüzü Bilgi Mühendisi Çıkarım Mekanizması Sistem Mühendisi Bilgi Tabanı Working Storage
5 Uzman Sistem Yapıları:

6 Uzman Sistem Yapıları:

7 Uzman Sistem Yapıları:
8 Uzman Sistem Yapıları:
9 Uzman Sistem Kontrolcülü bir Kontrol Sistemi
10 Bilgi tabanı (knowledge base): Ø Uzmanın bildirilerinden oluşur. If Then kurallarıyla yapılandırılır.
11 Çalışma alanı (working space-storage) Problem çözümüne ilişkin gerekli özel verileri bulundurur.
12 Çıkarım Mekanizması (Muhakeme ünitesi) (inference engine) Bilgi tabanında depolanan bilgileri, bir sonuç elde etmek için mantıklı bir sıra ile icra eden ünitedir.
13 Uzman Sistemlerde Kişisel Roller: Uzman sistem dizaynının anlaşılması için sistem ile birbirini etkileyen kişisel rollerin de anlaşılmasına ihtiyaç vardır. Bu kişisel roller;

14 I. Birincil uzman (domain expert) Problemin çözüm yolunu tespit eden kişi yada kişiler. UZMAN
15 Uzman kişilerin özellikleri: Bir konuda bazı bilgilere sahip kişilere uzman denemez. İlgili konuda hem bilgi hem de tecrübe sahibi kişiler uzman olarak nitelendirilir. Kişinin uzman olması yeterli değildir, bu bilgiyi dışarıya aktarabiliyor olması gerekir. Uzman kişi bilgiyi paylaşmak istemelidir. Uzman kişinin oluşturulacak sisteme güvenmelidirler.
16 II. Bilgi Mühendisi (knowledge engineer) Uzmanın bilgisini çözerek uzman sistemin kullanabileceği şekle dönüştüren kişidir.

17 III. Kullanıcı (user) Uzman tarafından verilen bilgileri problem çözümünde kullanacak kişi

18 IV. Sistem Mühendisi Kullanıcı arabirimini oluşturan, bilgi tabanının bildirimsel biçimini tasarlayan, çıkarım motorunu uygulayan kişidir. Projenin büyüklüğüne bağlı olarak, sistem ve bilgi mühendisi aynı kişi olabilir.


19 UZMAN SİSTEM GELİŞTİRME
20 Uzman sisteme ne zaman ihtiyaç duyulur? Uzman sistem geliştirmeden önce uzman sistemin uzmanlık alanı belirlenmelidir. Uzmanlık alanı geniş tutulmamalıdır. Başarılı uzman sistemler bir konu üzerine odaklananlardır. Uzman sistemin çözeceği problem iyi tanımlanmalıdır. Problemin çözümü için uzman sisteme ihtiyaç olmalıdır.
21 Uzman sisteme ne zaman ihtiyaç duyulur? Matematiksel olarak çözülebilen problemler için uzman sistem geliştirmek zaman kaybıdır. Uzmanlık gerektirmeyen problemlerin çözümü için uzman sistem geliştirmek gereksizdir. Uzman sistem geliştirilecek problemler tekrarlanabilir nitelikte olmalıdır. Senede bir kez meydana gelen bir problem için uzman sistem geliştirmek gereksizdir. Çözülecek problem için en az bir uzman bulunamaz ise uzman sistemin bir anlamı olmayacaktır.
22 Uzman Sistem geliştirme adımları: Kavramsal analiz Problemlerin formülasyonu ve bir prototip oluşturma Uzman sistemin oluşturulması ve test edilmesi Uygulama
23 1. Kavramsal analiz: Uzman sistemin çözmesi istenen problem için önemli olan kavramların belirlenmesi ve bu kavramların birbirleri ile ilişkilerinin ortaya konulması gerekir. Sistemin fonksiyonel özellikleri de bu adımda belirlenir. Bu özellikler uzman görüşleri ile belirlenir. Uzmanların kimler olacağı ve kullanılacak literatür belirlenir. Risk analizi yapılır. Uzman sistem geliştirmede kullanılacak araçlar belirlenir. Hazır programlar veya yeni bir yazılım gibi
24 2. Problemin formülasyonu ve bir prototip oluşturma: Uzmandan bilgiler alınır ve yazılım dillerinin anlayacağı ifadelere dönüştürülür. Başlangıçta bazı bilgiler ile prototip çalışır hale getirilir. Bilgiler geldikçe eklenir. Yani adım adım sistemin uzmanlığı artırılır. Sistemi oluştururken gereksiz bilgi ile sistemi hantal hale getirmemek için uzmanlar ile sürekli ilişkide olmak önemlidir. Sistemi problemin çözümü için geliştirmek önemlidir, bu nedenle problemi sisteme uydurma çabası içinde olmamak gerekir.
25 2. Problemin formülasyonu ve bir prototip oluşturma: Uzman sistemler, uzman sistem kabukları (shell) kullanılarak oluşturulur. Kullanılacak kabuk problem uzayının tüm bilgilerini içerebilecek, karar verme sürecine uygun özelliklere sahip olmalıdır. Bu nedenle gerekli hallerde başka kabuk kullanmak daha anlamlıdır. Ancak probleme özgü olarak da mühendisler müstakil uzman sistem yazılımları geliştirebilirler.
26 3. Uzman sistemin geliştirilmesi ve test edilmesi: Prototip zaman içinde uzman sisteme dönüşür. Bilgi tabanındaki bilgilerin ve sistemin verdiği kararların doğruluğu uzmana onaylatılmalıdır. Uzman sistemlerin gücü bilgi tabanlarının eksik bilgi içermemesi ile paraleldir. Bu nedenle problem uzayının tüm bilgileri burada mevcut olmalı ve sonuçları uzman tarafından onaylanmış olmalıdır. Sistemin doğru kararlar üretemediği durumlar tespit edilmeli çıkarım mekanizmasında da gerekli değişiklikler yapılmalıdır. Sistemin testi esnasında değişik senaryolar üretilerek uzmanlar ile beraber sonuçlar test edilmelidir.
27 4. Uygulama: Uygulamaya alınan sistem gerçek hayat ile doğrudan etkileşim içindedir. Verdiği kararlar uzmanlar tarafından kabul edilebilir olmalıdır. Devreye alınan sistemin bakımı, geliştirilmesi ve güncellenmesi önemlidir.
28 Uzman sistemlerin özellikleri: v Yüksek Performans v Hızlı Cevap Verme v Güvenilirlik v Anlaşılabilirlik v Esneklik
29 Faydaları: u Maliyet Azalması u Hazır Bilgi u Verimlilik Artışı u Kalıcı Bilgi u Açıklama
30 Faydaları: u Kalite İyileştirmesi u İşleyiş Hatalarını Azaltma u Esneklik u Daha Ucuz Cihaz Kullanımı u Tehlikeli Çevrelerde İşlem


31 Faydaları:
32 u Sınırlı bir sahada karışık problemlerin çözümü u Duygusallıktan Uzak Cevaplar u Akıllı Veri Tabanı u Güncellik
33 Uzman sistemlerde karşılaşılan zorluklar İnsanlardan sisteme uygulanacak bilgi almak zordur ve alınan bilgiler ise her zaman uygulanabilir olmayabilir. Uzman sistemlerin çalışma alanları sınırlı olabilir. Sistemi oluşturacak ve kuracak uzmanların azlığı ve yüksek ücret talepleri sistemin maliyetini yükseltebilir. Farklı uzman bilgilerinde çelişkilerle karşılaşabilir.
34 Kısıtlar: u Bilginin temsil edilmesi zor olabilir.. u İnsanlardan bilgi almak zordur. u Uzman Sistemler ancak sınırlı sahalarda iyi çalışabilirler.
35 Kısıtlar: u Yardım için bilgi mühendisine ihtiyaç gösterir u Sistemin maliyeti ve geliştirme süresi engelleyici bir faktördür u Her hangi bir uzmanın durum değerlendirmesi için yaklaşımı farklı bile olsa doğru olmalıdır. u Çok tecrübeli bir uzman bile olsa, zaman baskısı altında olduğu zaman iyi bir durumsal değerlendirme yapması zordur.
36 BİR UZMAN SİSTEMİN ETKİLİLİĞİ
37 1. Bilgi tabanı: Uzman sistem geliştirmede önemli noktalardan biri bilgi tabanın inşasıdır. Burada uzmandan alınan bilginin temsili ile bilgi tabanındaki gösterimi arasındaki anlamsal boşluğun en alt seviyeye indirilmesi gereklidir.
38 2. Çıkarım mekanizması: Bir uzman sistemin en önemli ünitesi bilgi tabanı olmasına rağmen, bu bilgi tabanını kullanıp sonuç üretebilecek iyi bir çıkarım mekanizması olmaması durumunda, bilgi tabanının hiçbir işe yaramayacağı açıktır.
39 Çıkarım mekanizmasının genel yapısı
40 İleri ve geri zincirleme: Bir çıkarım mekanizmasının, bilgi tabanında bulunan bilgileri kullanarak sonuca varabilmesi için; ileriye zincirleme (forward chaining) ve geriye zincirleme (backward chaining) adı verilen iki temel metod geliştirilmiştir.
41 İleriye zincirleme Bilgi tabanında bulunan hüküm ve bilgilerden başlayıp kuralları icra etmek böylece kuralların ikinci kısmında (veya THEN bölümlerinde bulunan) ifadeden yeni hükümler elde etmektir.
42 Geriye Zincirleme Geriye zincirlemede, aramaya hedeften (goal) başlanır ve bu hedefi gerçekleştirmek için gerekli olan hükümler, bilgi tabanındaki hedefle ilgili kurallara ait ikinci tarafların (veya THEN kısımlarının) sağlanması suretiyle elde edilmeye çalışılır.

43 İleri ve Geri Zincirleme Erhan AKDOĞAN, Ph.D. Biomechatronics Lab Spring
44 Zincirleme örneği: Forward Chaining Backward Chaining
45 3. Kullanıcı arayüzü (user interface) Kullanışlı, kolay ve amaca uygun olmalıdır.
46 Çerçeve (frame) Kavramı: Nesneleri tanımlamak için hiyerarşik veri yapılarıdır. Uzman sistem içinde kullanılan veriler çerçeveler tarafından organize edilirler (Milaric, 1986). Çerçeveler karşılıklı boş olan ve herbir nesneye ait bir özelliği gösteren özniteliklerden oluşmaktadır.
47 Çerçeve (frame) Kavramı: Bu öznitelikler, nesnenin özellikleri, diğerleri ile ilişkileri, sınırlama açıklamalarından meydana gelen öznitelik değerleri tarafından doldurulabilir. Öznitelik değerleri sayısal, sembolik ve alfasayısal gibi tipik verilerdir. Çerçeveler bilgiyi başka çerçevelere taşıyabilme özelliğine sahiptirler. Bu sayede hiyerarşide daha aşağıda olan bir çerçevenin hiyerarşide daha yukarıda olan çerçevelerden bazı özellikleri alabilmesine imkan sağlanır (Winstanley, 1991).
48 Bir çerçeve örneği:
49 Uygulama alanları v Tıp v Finans v Trafik kontrol v Robotik v Sigortacılık v Bilgisayar Konfigürasyonu




50 Örnek US Yazılımları Uzman Sistem Amacı Termo-dinamik REACTOR DELTA Reaktör kazalarının teşhis ve çözümü GE lokomotiflerinde arıza teşhis ve çözümü STEAMER Buhar santralinin çalışması
51 Uzman Sistem Yazılımları, Shell SHELL; JESS LEONARDO CLIPS PROGRAMLAMA DİLİ; PROLOG LISP
52 MÜHENDİSLİK UYGULAMALARI
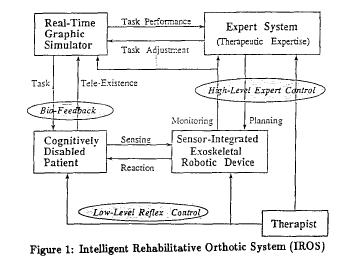
53 IROS
54

55 FİZYOTERABOT
56 Egzersiz türleri Pasif Egzersiz Aktif Yardımlı Egzersiz İzotonik Dirençli Egzersiz İzometrik Egzersiz İzokinetik Egzersiz ROBOTERAPİ
57 Zeki bir kontrol sistemi şu temel özelliklere sahiptir: (Fukuda & Arakawa, 1997) Algılama, Kavrama veya sezgi, Bilgi Toplama, Öğrenme, Sonuç çıkarma, Karar verme, Uygulama.

58 Fizyoterabot zeki bir sistemdir
59 FİZYOTERABOT un YAPISI ve İŞLEYİŞİ
60 Sistem yapısı ZEKİ KONTROLÖR ROBOT KOLU FİZYOTERAPİST HASTA
61 FİZYOTERABOT Donanımı BİLGİSAYAR ACİL DURDURMA HASTA Fizyoterapist Dijital Kuvvet ve Konum Bilgisi ZEKİ KONTROLÖR Veri Toplama Kartı Analog Tork Bilgisi SERVO MOTOR SÜRÜCÜ MOTOR Dijital Tork Bilgisi Enkoder Emülasyonu Resolver Sınır Anahtarları ROBOT KOLU Analog Kuvvet Bilgisi RS232 KUVVET KONTROLÖRÜ KUVVET/TORK ALGILAYICI Dijital I/O
62 FİZYOTERABOTU OLUŞTURAN BİRİMLERİN DETAYLI İNCELENMESİ
 Ø Her iki bacak için kullanılabilir.")
63 ROBOT KOLU LİNK 1 MOTOR 2 (SM 2 ) (Diz Eklemi) MOTOR 1 (SM 1 ) (Kalça Eklemi) Ø 3 - D.O.F Ø Diz (flex-eks) Ø Kalça (flex-eks,abd-add) Ø Diz linki parelelogram yapı LİNK 2 LİNK 2 Ø Tüm motorlar tabanda Ø Uzuv boyutuna göre ayarlanabilir z y LİNK1 MOTOR 0 (SM 0 ) Ø Her iki bacak için kullanılabilir. x Diz Kal ça Dönm e 1 Dönm e 2 Dönm e 3
64 Zeki kontrolör: Zeki Kontrolör Fizyoterapist -Hasta Bilgileri -Terapi süresi -Egzersiz Türü -Hareket tekrar sayısı -Uygulanacak ağırlık -EHA -Direnç seviyesi -Hız -Egzersiz Sonuçları Kullanıcı Ara Yüzeyi ve Merkezi İşlem Birimi Veri Tabanı Kural Tabanı θ, F istenen M, K, D Konvansiyonel Kontrolör Empedans Kontrol PID Kontrol θ guncel, F, Ftepki τ, θistenen Robot Kolu Algılayıcılar
65 Empedans Kontrol Robot kolu uç noktası (end-effector) mekanik empedansının ayarlanması yolu ile kuvvet ve konum kontrolünün gerçekleştirilmesi esasına dayanır. Bu mekanik empedans, robot kolunun çevresi ile olan teması sonucu ortaya çıkan harici kuvvetler ile uç nokta arasındaki ilişkiden kaynaklanır. Mekanik empedans, uygulanan harici kuvvete karşı mekanizmanın esnekliğinin davranışıdır.

66 Empedans Kontrol Türleri PASİF istenen mekanik empedans sadece mekanik elemanlar (yaylar ve sönümleyiciler) tarafından oluşturulur. AKTİF İstenen uç nokta mekanik empedansı robot uç noktasının konum, hız, temas kuvveti gibi parametrelerinin geri besleme yapılması ve böylece eklem aktüatörlerinin kontrol edilmesi ile oluşturulur.
67 Çevre ile temas durumu T M(q)q& + h ( q, q& ) = τ + J q F N ( ) harici Çalışma uzayı M(q)y+h(q,q)=J & & -T q τ+f ( ) y y y harici Arzu edilen empedans parametreleri cinsinden temas kuvveti My& + Dy& + Ky= F d d e d e harici
68 Diz Linki Empedans Kontrolü θθ& θθ& -T M( ) +h(, )=J θ τ+f ( ) y y y harici M θ& + D & θ + K θ = F d d e d e harici 1 2 L g θ. Dönme Noktası 0.01I 0.01I τ = τ ( D & θ + K θ ) + L 0.01F LM g d LM g d yer d e d e g harici J M = I h = N 1 y τ yer J = J = L T y y g = 1/ L g Diz Linki Empedans Kuralı: M d : arzu edilen atalet katsayısı [kg] D d : arzu edilen sönüm katsayısı [N/derece] K d : arzu edilen esneklik katsayısı [Ns/derece] 3

69 Egzersiz Türlerine Göre Kullanılan Kontrol Yöntemleri
70 Empedans Kontrol İçin İnsanlı Deneyler Empedans Parametreleri Parametre Değerleri M d [Kg] K d [N/derece] D d [Ns/derece] 0 0,001 0,01 0,1 1 Denek Boy [cm] Ağırlık [kg] A B C Hız Seviyesi Hız (derece/s) Yavaş 16 Orta 32 Hızlı 48
71 FİZYOTERABOT YAZILIM YAPISI

72
73 FİZYOTERAPİSTİN HAREKETLERİNİN MODELLENMESİ (ROBOTERAPİ)


74 ROBOTERAPİ ÖĞRENME TERAPİ Direk Terapi Zeki Terapi


75 Öğrenme Fizyoterapist egzersiz hareketlerini yaptırır Kuvvet ve Konum Algılayıcılar yolu ile konum ve kuvvet bilgileri, terapi süresi veri tabanına alınır.

76 Direk Terapi Öğrenme esnasında elde edilen kuvvet ve konum verileri kullanılarak terapi yapılır.
77 Konum [derece] Konum [derece] Konum [derece] Ogrenme Yorungesi DirekTerapi Yorungesi Konum Hatasi Zaman [s]
78 Zeki Terapi Fizyoterapistin hasta uzvunu zorlayarak açmasının modellenmesi amacıyla geliştirilmiştir. Bu amaçla sağlıklı deneklere farklı açılarda ekstansiyon ve fleksiyon hareketi yaptırıldı. Bu deneylerdeki veriler veri tabanına kaydedildi. Denek Ağırlık [kg] Boy [cm] Ayak Uzunluğu [cm] Bacak Uzunluğu [cm] Yaş A B C D E F
79 EHA Aralıklarına Göre Dosya İsimleri Dosya Adı EHA Aralığı 1 0 EHA< EHA< EHA< EHA< EHA< EHA< EHA< EHA< EHA< EHA<0
80 Kurallar HA: Hasta Ağırlığı MK: Maksimum Konum < Kural: Eğer HA 75kg dan büyük veya eşit ve 80kg dan küçük ve MK 15 dereceden büyük veya eşit ve 25 dereceden küçük ise C klasörünün 2 adlı dosyasını al >
81 Kural 1 < Eğer HA 67 ve HA<70 ise ve MK 0 ve MK<15 ise A klasörünün 1 adlı dosyasını al > Kural 2 < Eğer HA 67 ve HA<70 ise ve MK 15 ve MK<25 ise A klasörünün 2 adlı dosyasını al > Kural 3 < Eğer HA 67 ve HA<70 ise ve MK 25 ve MK<35 ise A klasörünün 3 adlı dosyasını al > Kural 4 < Eğer HA 67 ve HA<70 ise ve MK 35 ve MK<45 ise A klasörünün 4 adlı dosyasını al > Kural 5 < Eğer HA 67 ve HA<70 ise ve MK 45 ve MK<55 ise A klasörünün 5 adlı dosyasını al > Kural 6 < Eğer HA 67 ve HA<70 ise ve MK 55 ve MK<65 ise A klasörünün 6 adlı dosyasını al > Kural 7 < Eğer HA 67 ve HA<70 ise ve MK 65 ve MK<75 ise A klasörünün 7 adlı dosyasını al > Kural 8 < Eğer HA 67 ve HA<70 ise ve MK 75 ve MK<85 ise A klasörünün 8 adlı dosyasını al > Kural 9 < Eğer HA 67 ve HA<70 ise ve MK 85 ve MK<95 ise A klasörünün 9 adlı dosyasını al > Kural 10 < Eğer HA 67 ve HA<70 ise ve MK -30 ve MK<0 ise A klasörünün 10 adlı dosyasını al >
82 ÖĞRENME TEPKİ VAR MI? HAYIR TERAPİYE DEVAM ET ZEKİ TERAPİ ARAYÜZÜ ÇALIŞTIR EVET ZORLAYARAK UZVU AÇ MAX KONUM-KUVVET BİLGİSİNİ AL SINIR DEĞERE GİT HASTA AĞIRLIĞINA UYGUN VERİLERİ AL BAŞLANGIÇ KONUMUNA DÖN TERAPİYE BAŞLA BİTİR
83 Uzman Sistem yaklaşımı ile Civata ve Dişli Çark Seçimi
84 ÖDEV Uzman sistemlerin mühendislik uygulaması?
UZMAN SİSTEMLER. Dr. ERHAN AKDOĞAN Yıldız Teknik Üniversitesi Mekatronik Mühendisliği Bölümü. Mekatronik Mühendisliği Uygulamalarında Yapay Zeka
 UZMAN SİSTEMLER Dr. ERHAN AKDOĞAN Yıldız Teknik Üniversitesi Mekatronik Mühendisliği Bölümü 1 UZMAN SİSTEMLER Yapay zeka tekniklerinden birisi olan uzman sistemler, tecrübeye ve bilgiye dayalı problemlerin
UZMAN SİSTEMLER Dr. ERHAN AKDOĞAN Yıldız Teknik Üniversitesi Mekatronik Mühendisliği Bölümü 1 UZMAN SİSTEMLER Yapay zeka tekniklerinden birisi olan uzman sistemler, tecrübeye ve bilgiye dayalı problemlerin
Uzman Sistem (Expert System): Kullanıcılarına, uzmanların (experts) bilgi (knowledge) ve muhakeme yeteneklerine ulaşma ve bu yeteneklerden faydalanma
: Kullanıcılarına, uzmanların (experts) bilgi (knowledge) ve muhakeme yeteneklerine ulaşma ve bu yeteneklerden faydalanma") Uzman Sistem (Expert System): Kullanıcılarına, uzmanların (experts) bilgi (knowledge) ve muhakeme yeteneklerine ulaşma ve bu yeteneklerden faydalanma olanağı veren bir bilgisayar paketidir. Jackson (1990)
Uzman Sistem (Expert System): Kullanıcılarına, uzmanların (experts) bilgi (knowledge) ve muhakeme yeteneklerine ulaşma ve bu yeteneklerden faydalanma olanağı veren bir bilgisayar paketidir. Jackson (1990)
Öykü AKINGÜÇ
 Öykü AKINGÜÇ 201420404018 UZMAN SİSTEMLER Yapay zeka (Artificial Intelligence) konusunda son yıllarda yapılan araştırmalar, Uzman Sistemlerin popülerliğini ve buna paralel olarak da gelişmesini sağlamıştır.
Öykü AKINGÜÇ 201420404018 UZMAN SİSTEMLER Yapay zeka (Artificial Intelligence) konusunda son yıllarda yapılan araştırmalar, Uzman Sistemlerin popülerliğini ve buna paralel olarak da gelişmesini sağlamıştır.
F.Ü. Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü. 1. Sınıf
 F.Ü. Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü 1. Sınıf 1 MAT161 Matematik I 4 0 4 6 1 MAT162 Matematik II 4 0 4 6 2 FİZ111 Fizik I 4 0 4 6 2 FİZ112 Fizik II 3 0 3 5 3 FİZ105 Fizik Lab. I 0 2
F.Ü. Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü 1. Sınıf 1 MAT161 Matematik I 4 0 4 6 1 MAT162 Matematik II 4 0 4 6 2 FİZ111 Fizik I 4 0 4 6 2 FİZ112 Fizik II 3 0 3 5 3 FİZ105 Fizik Lab. I 0 2
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ. Ders 1- Yapay Zekâya Giriş. Erhan AKDOĞAN, Ph.D.
 Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
YZM YAPAY ZEKA VE UZMAN SİSTEMLER DERS#3: UZMAN SİSTEMLER#2
 YZM 5257- YAPAY ZEKA VE UZMAN SİSTEMLER DERS#3: UZMAN SİSTEMLER#2 Bilgi - Veri Bilgi ve Veri arasındaki fark nedir? Bilgi Türleri Bilgi türlerinin hiyerarşik yapısı Meta Bilgi Bilgi Enformasyon Veri (İşçi
YZM 5257- YAPAY ZEKA VE UZMAN SİSTEMLER DERS#3: UZMAN SİSTEMLER#2 Bilgi - Veri Bilgi ve Veri arasındaki fark nedir? Bilgi Türleri Bilgi türlerinin hiyerarşik yapısı Meta Bilgi Bilgi Enformasyon Veri (İşçi
KAVġAK TRAFĠĞĠNĠN KONTROLÜ ĠÇĠN BĠR SĠNYAL ZAMANLAMA ALGORĠTMASI ve UZMAN SĠSTEM YAKLAġIMINDA KULLANILMASI
 1. ÖZET KAVġAK TRAFĠĞĠNĠN KONTROLÜ ĠÇĠN BĠR SĠNYAL ZAMANLAMA ALGORĠTMASI ve UZMAN SĠSTEM YAKLAġIMINDA KULLANILMASI Erhan AKDOĞAN Marmara Üniversitesi Teknik Bilimler MYO, 81040 Göztepe-ĠSTANBUL Tel:0216
1. ÖZET KAVġAK TRAFĠĞĠNĠN KONTROLÜ ĠÇĠN BĠR SĠNYAL ZAMANLAMA ALGORĠTMASI ve UZMAN SĠSTEM YAKLAġIMINDA KULLANILMASI Erhan AKDOĞAN Marmara Üniversitesi Teknik Bilimler MYO, 81040 Göztepe-ĠSTANBUL Tel:0216
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS YAPAY ZEKA BG-421 4/2 2+1+0 2+.5 4 Dersin Dili : TÜRKÇE Dersin Seviyesi : LİSANS
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS YAPAY ZEKA BG-421 4/2 2+1+0 2+.5 4 Dersin Dili : TÜRKÇE Dersin Seviyesi : LİSANS
DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Yapay Zeka BİM-433 4/II 2+2+0 3 4,5 Dersin Dili Dersin Seviyesi
DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Yapay Zeka BİM-433 4/II 2+2+0 3 4,5 Dersin Dili Dersin Seviyesi
UZMAN SİSTEMLER TUĞÇE ÖZTÜRK
 UZMAN SİSTEMLER TUĞÇE ÖZTÜRK 201410404044 UZMAN SİSTEM - YAPAY ZEKA FARKI YAPAY ZEKA Herhangi bir insanın çözdüğü problemi çözmek için tasarlanır. UZMAN SİSTEM Uzman bir sistemin çözdüğü bir problemi çözmek
UZMAN SİSTEMLER TUĞÇE ÖZTÜRK 201410404044 UZMAN SİSTEM - YAPAY ZEKA FARKI YAPAY ZEKA Herhangi bir insanın çözdüğü problemi çözmek için tasarlanır. UZMAN SİSTEM Uzman bir sistemin çözdüğü bir problemi çözmek
Sistem Geliştirme Yaşam Döngüsü (The Systems Development Life Cycle) (SDLC)
 (SDLC)") Sistem Geliştirme Yaşam Döngüsü (The Systems Development Life Cycle) (SDLC) Sistem analistlerinin ve kullanıcı faaliyetlerinin spesifik döngüsünün kullanılmasıyla En iyi geliştirilmiş sistemin oluşmasını
Sistem Geliştirme Yaşam Döngüsü (The Systems Development Life Cycle) (SDLC) Sistem analistlerinin ve kullanıcı faaliyetlerinin spesifik döngüsünün kullanılmasıyla En iyi geliştirilmiş sistemin oluşmasını
Uzman Sistem Yaklaşımı ile Civata ve Dişli Çark Seçimi
 Turk J Engin Environ Sci 25 (2001), 169 177. c TÜBİTAK Uzman Sistem Yaklaşımı ile Civata ve Dişli Çark Seçimi Murat Tolga ÖZKAN, Mahmut GÜLESİN Gazi Üniversitesi, Teknik Eğitim Fakültesi, Makina Eğitimi
Turk J Engin Environ Sci 25 (2001), 169 177. c TÜBİTAK Uzman Sistem Yaklaşımı ile Civata ve Dişli Çark Seçimi Murat Tolga ÖZKAN, Mahmut GÜLESİN Gazi Üniversitesi, Teknik Eğitim Fakültesi, Makina Eğitimi
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Bilişim Sistemleri. Modelleme, Analiz ve Tasarım. Yrd. Doç. Dr. Alper GÖKSU
 Bilişim Sistemleri Modelleme, Analiz ve Tasarım Yrd. Doç. Dr. Alper GÖKSU Ders Akışı Hafta 5. İhtiyaç Analizi ve Modelleme II Haftanın Amacı Bilişim sistemleri ihtiyaç analizinin modeli oluşturulmasında,
Bilişim Sistemleri Modelleme, Analiz ve Tasarım Yrd. Doç. Dr. Alper GÖKSU Ders Akışı Hafta 5. İhtiyaç Analizi ve Modelleme II Haftanın Amacı Bilişim sistemleri ihtiyaç analizinin modeli oluşturulmasında,
Sakarya Üniversitesi - Bilgisayar Mühendisliği
 Dr. Seçkin Arı Giriş Seçkin Arı M5 415 ari@sakarya.edu.tr Kitap J.J. Craig, Introduction to Robotics, Prentice Hall, 2005 B. Siciliano,, RoboticsModelling, Planning, andcontrol, Springer, 2009 Not %12
Dr. Seçkin Arı Giriş Seçkin Arı M5 415 ari@sakarya.edu.tr Kitap J.J. Craig, Introduction to Robotics, Prentice Hall, 2005 B. Siciliano,, RoboticsModelling, Planning, andcontrol, Springer, 2009 Not %12
SOLIDWORKS SIMULATION EĞİTİMİ
 SOLIDWORKS SIMULATION EĞİTİMİ Kurs süresince SolidWorks Simulation programının işleyişinin yanında FEA teorisi hakkında bilgi verilecektir. Eğitim süresince CAD modelden başlayarak, matematik modelin oluşturulması,
SOLIDWORKS SIMULATION EĞİTİMİ Kurs süresince SolidWorks Simulation programının işleyişinin yanında FEA teorisi hakkında bilgi verilecektir. Eğitim süresince CAD modelden başlayarak, matematik modelin oluşturulması,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Mekatronik MK-426 4/Bahar (2+0+0) 2 3
 2 3") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-426 4/Bahar (2+0+0) 2 3 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-426 4/Bahar (2+0+0) 2 3 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
NEDEN DOĞULİNE. Detaylı Analiz. Doğru Planlama. Hedef Kitleye Uygunluk. Doğru İçerik Stratejisi. 7/24 Destek. Deneyimli Ekip
 NEDEN DOĞULİNE Detaylı Analiz Yapılan tüm çalışmaların temeli ve ilk adımı, detaylı analizdir. Analiz adımında, ürünün teknik, anahtar kelime, UI & UX, backlink, hedef kitle ve rakip analizi yapılır. Analiz
NEDEN DOĞULİNE Detaylı Analiz Yapılan tüm çalışmaların temeli ve ilk adımı, detaylı analizdir. Analiz adımında, ürünün teknik, anahtar kelime, UI & UX, backlink, hedef kitle ve rakip analizi yapılır. Analiz
Algoritma Geliştirme ve Veri Yapıları 2 Veri Modelleri. Mustafa Kemal Üniversitesi
 Algoritma Geliştirme ve Veri Yapıları 2 Veri Modelleri Veri modelleri, veriler arasında ilişkisel ve sırasal düzeni gösteren kavramsal tanımlardır. Her program en azından bir veri modeline dayanır. Uygun
Algoritma Geliştirme ve Veri Yapıları 2 Veri Modelleri Veri modelleri, veriler arasında ilişkisel ve sırasal düzeni gösteren kavramsal tanımlardır. Her program en azından bir veri modeline dayanır. Uygun
NX Motion Simulation:
 NX Motion Simulation: Mekanizma Hareket Analizi UNIGRAPHICS NX yazılımının modüllerinden biri olan NX Motion Simulation, NX Dijital Ürün Tasarımı ailesinin mühendislik bileşenlerinden birisidir. Motion
NX Motion Simulation: Mekanizma Hareket Analizi UNIGRAPHICS NX yazılımının modüllerinden biri olan NX Motion Simulation, NX Dijital Ürün Tasarımı ailesinin mühendislik bileşenlerinden birisidir. Motion
VERİ TABANI YÖNETİM SİSTEMLERİ Melih BÖLÜKBAŞI
 VERİ TABANI YÖNETİM SİSTEMLERİ Melih BÖLÜKBAŞI Dersin Hedefleri Veri Tabanı Kullanıcıları Veri Modelleri Veri Tabanı Tasarımı İlişkisel VT Kavramsal Tasarımı (Entity- Relationship, ER) Modeli VT KULLANICILARI
VERİ TABANI YÖNETİM SİSTEMLERİ Melih BÖLÜKBAŞI Dersin Hedefleri Veri Tabanı Kullanıcıları Veri Modelleri Veri Tabanı Tasarımı İlişkisel VT Kavramsal Tasarımı (Entity- Relationship, ER) Modeli VT KULLANICILARI
Albert Long Hall, Boğazi 4-55 Nisan 2008
 Sıkca Karşılaştığım Sorular Robotumu Büyütüyorum Makineler düşünebilir ya da hissedebilir mi? Kendiliklerinden yeni beceriler edinebilirler mi? Vücut, beyin ve dış ortamın etkileşimi sorunlara yeni ve
Sıkca Karşılaştığım Sorular Robotumu Büyütüyorum Makineler düşünebilir ya da hissedebilir mi? Kendiliklerinden yeni beceriler edinebilirler mi? Vücut, beyin ve dış ortamın etkileşimi sorunlara yeni ve
MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI
 MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI Mekatronik Mühendisliği Yüksek Lisans programının eğitim dili İngilizce olup, tezli ve tezsiz iki programdan oluşmaktadır. Tezli programda öğrencilerin; -
MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI Mekatronik Mühendisliği Yüksek Lisans programının eğitim dili İngilizce olup, tezli ve tezsiz iki programdan oluşmaktadır. Tezli programda öğrencilerin; -
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
DC Beslemeli Raylı Ulaşım Sistemlerinin Simülasyonu
 DC Beslemeli Raylı Ulaşım Sistemlerinin Simülasyonu M. Turan SÖYLEMEZ İstanbul Teknik Üniversitesi Elektrik Müh. Bölümü Süleyman Açıkbaş İstanbul Ulaşım A.Ş. Plan Giriş - Neden Raylı Sistem Simülasyonu?
DC Beslemeli Raylı Ulaşım Sistemlerinin Simülasyonu M. Turan SÖYLEMEZ İstanbul Teknik Üniversitesi Elektrik Müh. Bölümü Süleyman Açıkbaş İstanbul Ulaşım A.Ş. Plan Giriş - Neden Raylı Sistem Simülasyonu?
DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Nesne Yönelimli Programlama BİM-222 2/II 1+0+2 2 3 Dersin Dili
DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Nesne Yönelimli Programlama BİM-222 2/II 1+0+2 2 3 Dersin Dili
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Mekatronik MK-421 4/Bahar (3+1+0) 3,5 5
 3,5 5") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-421 4/Bahar (3+1+0) 3,5 5 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-421 4/Bahar (3+1+0) 3,5 5 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ: STATİK. Bölüm 1 Temel Kavramlar ve İlkeler
 MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ: STATİK Bölüm 1 Temel Kavramlar ve İlkeler Mekanik Mekanik Rijit-Cisim Mekaniği Şekil değiştiren Cismin Mekaniği Statik Dinamik Dengedeki Cisimler Hareketsiz veya durgun
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ: STATİK Bölüm 1 Temel Kavramlar ve İlkeler Mekanik Mekanik Rijit-Cisim Mekaniği Şekil değiştiren Cismin Mekaniği Statik Dinamik Dengedeki Cisimler Hareketsiz veya durgun
Öğretim planındaki AKTS Ulusal Kredi
 Ders Kodu Teorik Uygulama Lab. Yazılım Gereksinimleri Mühendisliği Ulusal Kredi Öğretim planındaki AKTS 481052000001303 3 0 0 3 5 Dersin Yürütülmesi Hakkında Bu ders gerçek dünya problemlerinin analiz
Ders Kodu Teorik Uygulama Lab. Yazılım Gereksinimleri Mühendisliği Ulusal Kredi Öğretim planındaki AKTS 481052000001303 3 0 0 3 5 Dersin Yürütülmesi Hakkında Bu ders gerçek dünya problemlerinin analiz
HİDROLİK SİSTEMLERİN TASARIMINDA PAKET PROGRAM VE HİDROLİK MODÜLLER KULLANILARAK KOLAY BENZETİM YAPILMASI
 49 HİDROLİK SİSTEMLERİN TASARIMINDA PAKET PROGRAM VE HİDROLİK MODÜLLER KULLANILARAK KOLAY BENZETİM YAPILMASI Tuna BALKAN M. A. Sahir ARIKAN ÖZET Bu çalışmada, hidrolik sistemlerin tasarımında hazır ticari
49 HİDROLİK SİSTEMLERİN TASARIMINDA PAKET PROGRAM VE HİDROLİK MODÜLLER KULLANILARAK KOLAY BENZETİM YAPILMASI Tuna BALKAN M. A. Sahir ARIKAN ÖZET Bu çalışmada, hidrolik sistemlerin tasarımında hazır ticari
Analog Kontrol Sistemleri
 Kontrol Sistemleri Gemi Tahriklerinde Kümelerinde Çift-yakıtlı Uygulamalarda Lokomotif Kontrolünde Dizel ve Gaz motorları Kümeleri Gemicilik Uygulamaları Lokomotifler Motor & Türbin kontrolü Kontrol Sistemleri
Kontrol Sistemleri Gemi Tahriklerinde Kümelerinde Çift-yakıtlı Uygulamalarda Lokomotif Kontrolünde Dizel ve Gaz motorları Kümeleri Gemicilik Uygulamaları Lokomotifler Motor & Türbin kontrolü Kontrol Sistemleri
MEKATRONİĞİN TEMELLERİ
 MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
VERİ KAYNAKLARI. Bilgi sisteminin öğelerinden biride veri
 VERİ KAYNAKLARI YÖNETİMİ İ İ 5. ÜNİTE GİRİŞ Bilgi sisteminin öğelerinden biride veri yönetimidir. Geleneksel yada çağdaş, birinci yada ikinci elden derlenen veriler amaca uygun veri formlarında tutulur.
VERİ KAYNAKLARI YÖNETİMİ İ İ 5. ÜNİTE GİRİŞ Bilgi sisteminin öğelerinden biride veri yönetimidir. Geleneksel yada çağdaş, birinci yada ikinci elden derlenen veriler amaca uygun veri formlarında tutulur.
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
Presinizi Servoprese Dönüştürmek Pres Sürücüsü PSH
 Presinizi Servoprese Dönüştürmek Pres Sürücüsü PSH Presinizi Yenilikçi Bir Anlayışla Kontrol Edin. Yenilikçilik PSH Pres sürücüsünde Servopompalar klasik valf ve kontrol teknolojisinin yerini alır. Bu
Presinizi Servoprese Dönüştürmek Pres Sürücüsü PSH Presinizi Yenilikçi Bir Anlayışla Kontrol Edin. Yenilikçilik PSH Pres sürücüsünde Servopompalar klasik valf ve kontrol teknolojisinin yerini alır. Bu
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
Doç. Dr. İlkay Ulusoy Parnas ODTÜ Elektrik Elektronik Müh.
 TUBITAK 1505 Proje: Demiryolları için gerçek zamanlı görüntü işleme ile ray hata analizi Doç. Dr. İlkay Ulusoy Parnas ODTÜ Elektrik Elektronik Müh. Akademisyenlerin yer alabileceği proje türleri Sadece
TUBITAK 1505 Proje: Demiryolları için gerçek zamanlı görüntü işleme ile ray hata analizi Doç. Dr. İlkay Ulusoy Parnas ODTÜ Elektrik Elektronik Müh. Akademisyenlerin yer alabileceği proje türleri Sadece
Kullanım Durumu Diyagramları (Use-case Diyagramları)
") Kullanım Durumu Diyagramları (Use-case Diyagramları) Analiz aşaması projeler için hayati önem taşır. İyi bir analizden geçmemiş projelerin başarı şansı azdır. Analiz ile birlikte kendimize Ne? sorusunu
Kullanım Durumu Diyagramları (Use-case Diyagramları) Analiz aşaması projeler için hayati önem taşır. İyi bir analizden geçmemiş projelerin başarı şansı azdır. Analiz ile birlikte kendimize Ne? sorusunu
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU -1-
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
NRM Makina Teknolojisiyle Endüstriye Değer Katıyor. Kalitemizin Temelinde Ar-Ge Var
 NRM Makina Teknolojisiyle Endüstriye Değer Katıyor NRM Makina, imalat sektöründe faaliyet gösteren tüm firmalar için robotik otomasyon sistemleri üreten bir teknoloji şirketidir. Türkiye deki ve dünyadaki
NRM Makina Teknolojisiyle Endüstriye Değer Katıyor NRM Makina, imalat sektöründe faaliyet gösteren tüm firmalar için robotik otomasyon sistemleri üreten bir teknoloji şirketidir. Türkiye deki ve dünyadaki
İŞLETİM SİSTEMLERİ. (Operating Systems)
") İŞLETİM SİSTEMLERİ (Operating Systems) İşletim Sistemi Tanımı, Görevleri, Bilinen İşletim Sistemleri Çok Kullanıcılı Sistemler, Bellek Yönetim Birimi Linux ve Windows Ailesi, Bilinen İşletim Sistemleri
İŞLETİM SİSTEMLERİ (Operating Systems) İşletim Sistemi Tanımı, Görevleri, Bilinen İşletim Sistemleri Çok Kullanıcılı Sistemler, Bellek Yönetim Birimi Linux ve Windows Ailesi, Bilinen İşletim Sistemleri
Online teknik sayfa VISIC620 GÖRÜŞ MESAFESI ÖLÇÜM CIHAZLARI
 Online teknik sayfa VISIC620 A B C D E F H I J K L M N O P Q R S T Sipariş bilgileri Tip VISIC620 Stok no. Talep üzerine Uygulama yeri ve müşteri gereklilikleri doğrultusunda kullanılacak cihazın özellikleri
Online teknik sayfa VISIC620 A B C D E F H I J K L M N O P Q R S T Sipariş bilgileri Tip VISIC620 Stok no. Talep üzerine Uygulama yeri ve müşteri gereklilikleri doğrultusunda kullanılacak cihazın özellikleri
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir.
 teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir. irvision, FANUC R-30iA Kontrolörü için bir entegre robot görme
teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir. irvision, FANUC R-30iA Kontrolörü için bir entegre robot görme
DEPREM BÖLGESİNDE BİLGİ TABANLI İŞ GÜVENLİĞİ VE SAĞLIĞI YÖNETİMİ
 Özet DEPREM BÖLGESİNDE BİLGİ TABANLI İŞ GÜVENLİĞİ VE SAĞLIĞI YÖNETİMİ Ercan ÖZTEMEL, Ali İlhan HACIFAZLIOĞLU Sakarya Üniversitesi Mühendislik Fakültesi Endüstri Mühendisliği Bölümü, Sakarya İş güvenliği
Özet DEPREM BÖLGESİNDE BİLGİ TABANLI İŞ GÜVENLİĞİ VE SAĞLIĞI YÖNETİMİ Ercan ÖZTEMEL, Ali İlhan HACIFAZLIOĞLU Sakarya Üniversitesi Mühendislik Fakültesi Endüstri Mühendisliği Bölümü, Sakarya İş güvenliği
KALİTE SİSTEM YÖNETİCİSİ EĞİTİMİ
 FMEA-HATA TÜRLERİ VE ETKİ ANALİZİ Tanımlama Mevcut veya olası hataları ortaya koyan, bu hataların yaratabileceği etkileri göz önünde bulunduran ve etkilerine göre hataları önceliklendirerek oluşmalarının
FMEA-HATA TÜRLERİ VE ETKİ ANALİZİ Tanımlama Mevcut veya olası hataları ortaya koyan, bu hataların yaratabileceği etkileri göz önünde bulunduran ve etkilerine göre hataları önceliklendirerek oluşmalarının
Bu modül, senaryolar, schedule form, raporlar, personel ve öğretmen portalı schedule menülerini kapsamaktadır.
 Working Schedule (Çalışma Programı) Bu modül, senaryolar, schedule form, raporlar, personel ve öğretmen portalı schedule menülerini kapsamaktadır. Senaryo Görev senaryoları belirlenen kriterlere göre sistem
Working Schedule (Çalışma Programı) Bu modül, senaryolar, schedule form, raporlar, personel ve öğretmen portalı schedule menülerini kapsamaktadır. Senaryo Görev senaryoları belirlenen kriterlere göre sistem
GÜÇ SİSTEM ANALİZLERİNİN ENERJİ VERİMLİLİĞE ETKİLERİ
 EVK 2015 GÜÇ SİSTEM ANALİZLERİNİN ENERJİ VERİMLİLİĞE ETKİLERİ Turhan Türker Siemens A.Ş. Answers for energy management. Nedir? Güç sistemlerinin normal işletme koşullarında veya arızalarda nasıl çalışacağını
EVK 2015 GÜÇ SİSTEM ANALİZLERİNİN ENERJİ VERİMLİLİĞE ETKİLERİ Turhan Türker Siemens A.Ş. Answers for energy management. Nedir? Güç sistemlerinin normal işletme koşullarında veya arızalarda nasıl çalışacağını
Bilgi ve İletişim Teknolojileri (JFM 102) Ders 7. LINUX OS (Sistem Yapısı) BİLGİ & İLETİŞİM TEKNOLOJİLERİ. LINUX Yapısı
 Ders 7. LINUX OS (Sistem Yapısı) BİLGİ & İLETİŞİM TEKNOLOJİLERİ. LINUX Yapısı") Ders 7 LINUX OS (Sistem Yapısı) BİLGİ & İLETİŞİM TEKNOLOJİLERİ 1 LINUX Yapısı LINUX işletim sisteminin diğer işletim sistemleri gibi kendine özgü bir yapısı vardır. LINUX yapısı ve bileşenleri aşağıdaki
Ders 7 LINUX OS (Sistem Yapısı) BİLGİ & İLETİŞİM TEKNOLOJİLERİ 1 LINUX Yapısı LINUX işletim sisteminin diğer işletim sistemleri gibi kendine özgü bir yapısı vardır. LINUX yapısı ve bileşenleri aşağıdaki
KOCAELİ ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BLM209 PROGRAMLAMA LAB. I PROJE 3 PROJE SÜRESİ:
 KOCAELİ ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BLM209 PROGRAMLAMA LAB. I PROJE 3 PROJE SÜRESİ: 26.11.2018-14.12.2018 ROBOT PROJESİ Projede farklı türdeki robotların hareket etme, yük taşıma özellikleri
KOCAELİ ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BLM209 PROGRAMLAMA LAB. I PROJE 3 PROJE SÜRESİ: 26.11.2018-14.12.2018 ROBOT PROJESİ Projede farklı türdeki robotların hareket etme, yük taşıma özellikleri
türk Ark kaynak ve Plazma kesme İnverterleri
 türk Ark kaynak ve Plazma kesme İnverterleri www.selcoweld.com www.selcoweld.com Selco 30 yıldır inverterler üretmektedir Selco 30 yıldır ark kaynak uygulamaları için inverterlerin dizayn, geliştirme ve
türk Ark kaynak ve Plazma kesme İnverterleri www.selcoweld.com www.selcoweld.com Selco 30 yıldır inverterler üretmektedir Selco 30 yıldır ark kaynak uygulamaları için inverterlerin dizayn, geliştirme ve
HAVACILIKTA TERSİNE MÜHENDİSLİK UYGULAMALARI. Özgecan YILDIZ 1
 HAVACILIKTA TERSİNE MÜHENDİSLİK UYGULAMALARI Özgecan YILDIZ 1 Tersine Mühendislik Nedir? Tersine mühendislik, teknik bilgi paketi mevcut olmayan bir sistem, cihaz ya da parçanın üretim aşamalarını da içerecek
HAVACILIKTA TERSİNE MÜHENDİSLİK UYGULAMALARI Özgecan YILDIZ 1 Tersine Mühendislik Nedir? Tersine mühendislik, teknik bilgi paketi mevcut olmayan bir sistem, cihaz ya da parçanın üretim aşamalarını da içerecek
VERİ MADENCİLİĞİ önemsiz olmayan, gizli, önceden bilinmeyen, potansiyel olarak kullanışlı
 Veri Madenciliği, örüntü tanıma, istatistik ve matematiksel yöntemlerin kullanımıyla devasa miktardaki güncel ya da geçmiş veri içerisinden ilgi çekici ( önemsiz olmayan, gizli, önceden bilinmeyen, potansiyel
Veri Madenciliği, örüntü tanıma, istatistik ve matematiksel yöntemlerin kullanımıyla devasa miktardaki güncel ya da geçmiş veri içerisinden ilgi çekici ( önemsiz olmayan, gizli, önceden bilinmeyen, potansiyel
Biyomekatronik Sistemler. Kemik Uzatma Sistemleri. Erhan AKDOĞAN, Ph.D.
 Biyomekatronik Sistemler Kemik Uzatma Sistemleri Erhan AKDOĞAN, Ph.D. Erhan AKDOĞAN, Ph.D. Biyomekatronik Sistemler Mekatronik Mühendisliği Sunum İçeriği: Kemik Kanseri Risk Faktörleri Belirtileri Teşhis
Biyomekatronik Sistemler Kemik Uzatma Sistemleri Erhan AKDOĞAN, Ph.D. Erhan AKDOĞAN, Ph.D. Biyomekatronik Sistemler Mekatronik Mühendisliği Sunum İçeriği: Kemik Kanseri Risk Faktörleri Belirtileri Teşhis
BİÇİMSEL YÖNTEMLER (FORMAL METHODS) Betül AKTAŞ Suna AKMELEZ
 Betül AKTAŞ Suna AKMELEZ") BİÇİMSEL YÖNTEMLER (FORMAL METHODS) Betül AKTAŞ 14011021 Suna AKMELEZ 14011050 Biçimsel Yöntemler Nedir? Nerede Kullanılır? Biçimsel Tasarım Biçimsel Yöntemlerin Yararları Biçimsel Yöntemlerin Zayıf Yönleri
BİÇİMSEL YÖNTEMLER (FORMAL METHODS) Betül AKTAŞ 14011021 Suna AKMELEZ 14011050 Biçimsel Yöntemler Nedir? Nerede Kullanılır? Biçimsel Tasarım Biçimsel Yöntemlerin Yararları Biçimsel Yöntemlerin Zayıf Yönleri
Bilkent Üniversitesi Bilgisayar Mühendisliği Bölümü. Bilgisayar Mühendisliği
 Bilkent Üniversitesi Bilgisayar Mühendisliği Bölümü Bilgisayar Mühendisliği Bilgisayar Mühendisliği Günümüzde, finans, tıp, sanat, güvenlik, enerji gibi bir çok sektör, bilgisayar mühendisliğindeki gelişimlerden
Bilkent Üniversitesi Bilgisayar Mühendisliği Bölümü Bilgisayar Mühendisliği Bilgisayar Mühendisliği Günümüzde, finans, tıp, sanat, güvenlik, enerji gibi bir çok sektör, bilgisayar mühendisliğindeki gelişimlerden
Bu proje Avrupa Birliği ve Türkiye Cumhuriyeti tarafından finanse edilmektedir. İLERİ ÖLÇME TEKNİKLERİ (CMM) EĞİTİMİ DERS NOTU
 EĞİTİMİ DERS NOTU") Bu proje Avrupa Birliği ve Türkiye Cumhuriyeti tarafından finanse edilmektedir. İLERİ ÖLÇME TEKNİKLERİ (CMM) EĞİTİMİ DERS NOTU İLERİ ÖLÇME TEKNİKLERİ Koordinat Ölçme Teknolojisi Koordinat ölçme teknolojisi,
Bu proje Avrupa Birliği ve Türkiye Cumhuriyeti tarafından finanse edilmektedir. İLERİ ÖLÇME TEKNİKLERİ (CMM) EĞİTİMİ DERS NOTU İLERİ ÖLÇME TEKNİKLERİ Koordinat Ölçme Teknolojisi Koordinat ölçme teknolojisi,
İNVERTER ENTEGRELİ MOTORLAR
 İNVERTER ENTEGRELİ MOTORLAR ENTEGRE MOTOR ÇÖZÜMLERİ Günümüzde enerji kaynakları hızla tükenirken enerjiye olan talep aynı oranda artmaktadır. Bununla beraber enerji maliyetleri artmakta ve enerjinin optimum
İNVERTER ENTEGRELİ MOTORLAR ENTEGRE MOTOR ÇÖZÜMLERİ Günümüzde enerji kaynakları hızla tükenirken enerjiye olan talep aynı oranda artmaktadır. Bununla beraber enerji maliyetleri artmakta ve enerjinin optimum
Spor Yaralanmalarında Konservatif Tedavi. Prof. Dr. Reyhan Çeliker Acıbadem Üniversitesi
 Spor Yaralanmalarında Konservatif Tedavi Prof. Dr. Reyhan Çeliker Acıbadem Üniversitesi Yumuşak doku injurisi Kas, tendon ve bağ yaralanmalarını kapsar. Strain: Kas ve tendonların aşırı yüklenmesi veya
Spor Yaralanmalarında Konservatif Tedavi Prof. Dr. Reyhan Çeliker Acıbadem Üniversitesi Yumuşak doku injurisi Kas, tendon ve bağ yaralanmalarını kapsar. Strain: Kas ve tendonların aşırı yüklenmesi veya
BLG 1306 Temel Bilgisayar Programlama
 BLG 1306 Temel Bilgisayar Programlama Öğr. Grv. M. Mustafa BAHŞI WEB : mustafabahsi.cbu.edu.tr E-MAIL : mustafa.bahsi@cbu.edu.tr Bilgisayar ile Problem Çözüm Aşamaları Programlama Problem 1- Problemin
BLG 1306 Temel Bilgisayar Programlama Öğr. Grv. M. Mustafa BAHŞI WEB : mustafabahsi.cbu.edu.tr E-MAIL : mustafa.bahsi@cbu.edu.tr Bilgisayar ile Problem Çözüm Aşamaları Programlama Problem 1- Problemin
İSG RİSK DEĞERLENDİRME PROSEDÜRÜ
 .0 AMAÇ : BAŞAKŞEHİR 'nin kanundan doğan, yapmakla mükellef olduğu "İş Sağlığı ve Güvenliği" risklerinin nasıl değerlendirileceğini belirlemek,.0 KAPSAM : BAŞAKŞEHİR N'de uygulanan "İş Sağlığı ve Güvenliği
.0 AMAÇ : BAŞAKŞEHİR 'nin kanundan doğan, yapmakla mükellef olduğu "İş Sağlığı ve Güvenliği" risklerinin nasıl değerlendirileceğini belirlemek,.0 KAPSAM : BAŞAKŞEHİR N'de uygulanan "İş Sağlığı ve Güvenliği
BIM in Benimsenmesi ve BIM deki I nin Belirlenmesi
 BIM in Benimsenmesi ve BIM deki I nin Belirlenmesi Daniel KAZADO daniel.kazado@procs.com.tr Doç. Dr. Esin ERGEN PEHLEVAN esin.ergen@itu.edu.tr Daniel Kazado İnşaat sektöründe 20 yıllık tecrübe, 12 yıldır
BIM in Benimsenmesi ve BIM deki I nin Belirlenmesi Daniel KAZADO daniel.kazado@procs.com.tr Doç. Dr. Esin ERGEN PEHLEVAN esin.ergen@itu.edu.tr Daniel Kazado İnşaat sektöründe 20 yıllık tecrübe, 12 yıldır
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş
 Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Üretim Teknikleri MK-314 3/Güz (2+1+0) 2,5 6. : Yrd.Doç.Dr.Müh.Kd.Bnb.
 2,5 6. : Yrd.Doç.Dr.Müh.Kd.Bnb.") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Üretim Teknikleri MK-314 3/Güz (2+1+0) 2,5 6 Dersin Dili Dersin Seviyesi Dersin Önkoşulu
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Üretim Teknikleri MK-314 3/Güz (2+1+0) 2,5 6 Dersin Dili Dersin Seviyesi Dersin Önkoşulu
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ESNEK İMALAT SİSTEMLERİ DERS NOTLARI 2 Arş. Gör.
 Bir üretim hattında genel anlamda şu görevler (task) yürütülür: İş parçaları depo alanlarından alınarak işleme makine araçlarına gönderilir. Robotlar konveyör hattından iş parçalarını alarak istasyonda
Bir üretim hattında genel anlamda şu görevler (task) yürütülür: İş parçaları depo alanlarından alınarak işleme makine araçlarına gönderilir. Robotlar konveyör hattından iş parçalarını alarak istasyonda
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS PROGRAMLAMA DİLLERİ BG-324 3/2 3+0+0 3+0 4 Dersin Dili : TÜRKÇE Dersin Seviyesi
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS PROGRAMLAMA DİLLERİ BG-324 3/2 3+0+0 3+0 4 Dersin Dili : TÜRKÇE Dersin Seviyesi
Online teknik sayfa VICOTEC450 TÜNEL SENSÖRLERI
 Online teknik sayfa VICOTEC450 A B C D E F H I J K L M N O P Q R S T Sipariş bilgileri Tip VICOTEC450 Stok no. Talep üzerine Uygulama yeri ve müşteri gereklilikleri doğrultusunda kullanılacak cihazın özellikleri
Online teknik sayfa VICOTEC450 A B C D E F H I J K L M N O P Q R S T Sipariş bilgileri Tip VICOTEC450 Stok no. Talep üzerine Uygulama yeri ve müşteri gereklilikleri doğrultusunda kullanılacak cihazın özellikleri
BSM 532 KABLOSUZ AĞLARIN MODELLEMESİ VE ANALİZİ OPNET MODELER
 BSM 532 KABLOSUZ AĞLARIN MODELLEMESİ VE ANALİZİ OPNET MODELER Yazılımı ve Genel Özellikleri Doç.Dr. Cüneyt BAYILMIŞ Kablosuz Ağların Modellemesi ve Analizi 1 OPNET OPNET Modeler, iletişim sistemleri ve
BSM 532 KABLOSUZ AĞLARIN MODELLEMESİ VE ANALİZİ OPNET MODELER Yazılımı ve Genel Özellikleri Doç.Dr. Cüneyt BAYILMIŞ Kablosuz Ağların Modellemesi ve Analizi 1 OPNET OPNET Modeler, iletişim sistemleri ve
cofaso ile farkı yaşayın Şubat 2009 www.mertbilgi.com.tr
 cofaso ile farkı yaşayın Şubat 2009 www.mertbilgi.com.tr cofaso ile farkı yaşayın Otomasyon ve pano projelerinizi profesyonel bilgisayar destekli mühendislik yazılımı (CAE) cofaso ile yönetin Giriş cofaso
cofaso ile farkı yaşayın Şubat 2009 www.mertbilgi.com.tr cofaso ile farkı yaşayın Otomasyon ve pano projelerinizi profesyonel bilgisayar destekli mühendislik yazılımı (CAE) cofaso ile yönetin Giriş cofaso
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS PROGRAMLAMA BG-213 2/1 2+0+2 2+1 5 Dersin Dili : TÜRKÇE Dersin Seviyesi : LİSANS
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS PROGRAMLAMA BG-213 2/1 2+0+2 2+1 5 Dersin Dili : TÜRKÇE Dersin Seviyesi : LİSANS
BÖLÜM 1. ASENKRON MOTORLAR
 İÇİNDEKİLER ÖNSÖZ...iv GİRİŞ...v BÖLÜM 1. ASENKRON MOTORLAR 1. ASENKRON MOTORLAR... 1 1.1. Üç Fazlı Asenkron Motorlar... 1 1.1.1. Üç fazlı asenkron motorda üretilen tork... 2 1.1.2. Üç fazlı asenkron motorlara
İÇİNDEKİLER ÖNSÖZ...iv GİRİŞ...v BÖLÜM 1. ASENKRON MOTORLAR 1. ASENKRON MOTORLAR... 1 1.1. Üç Fazlı Asenkron Motorlar... 1 1.1.1. Üç fazlı asenkron motorda üretilen tork... 2 1.1.2. Üç fazlı asenkron motorlara
Bilgisayar Mühendisliği. Bilgisayar Mühendisliğine Giriş 1
 Bilgisayar Mühendisliği Bilgisayar Mühendisliğine Giriş 1 Mühendislik Nedir? Mühendislik, bilim ve matematiğin yararlı cihaz ve sistemlerin üretimine uygulanmasıdır. Örn: Elektrik mühendisleri, elektronik
Bilgisayar Mühendisliği Bilgisayar Mühendisliğine Giriş 1 Mühendislik Nedir? Mühendislik, bilim ve matematiğin yararlı cihaz ve sistemlerin üretimine uygulanmasıdır. Örn: Elektrik mühendisleri, elektronik
TOBB ETÜ. MAK 312 MAKİNE ELEMANLARI DERSİ GÜZ DÖNEMİ Dönme Dolap Tasarımı
 TOBB ETÜ MAK 312 MAKİNE ELEMANLARI DERSİ GÜZ DÖNEMİ Dönme Dolap Tasarımı Amaç: Eğlence merkezlerinin olmazsa olmazı dönme dolaplar, ilk olarak George Washington Gale Ferris, Jr., tarafından 1893 yılında
TOBB ETÜ MAK 312 MAKİNE ELEMANLARI DERSİ GÜZ DÖNEMİ Dönme Dolap Tasarımı Amaç: Eğlence merkezlerinin olmazsa olmazı dönme dolaplar, ilk olarak George Washington Gale Ferris, Jr., tarafından 1893 yılında
YENİLENEBİLİR ENERJİ SİSTEMLERİ DENEYİ
 T. C. GÜMÜŞHANE ÜNİVERSİTESİ MÜHENDİSLİK VE DOĞA BİLİMLERİ FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE MÜHENDİSLİĞİ DENEYLER II YENİLENEBİLİR ENERJİ SİSTEMLERİ DENEYİ ÖĞRENCİ NO : ADI SOYADI : GRUP NO
T. C. GÜMÜŞHANE ÜNİVERSİTESİ MÜHENDİSLİK VE DOĞA BİLİMLERİ FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE MÜHENDİSLİĞİ DENEYLER II YENİLENEBİLİR ENERJİ SİSTEMLERİ DENEYİ ÖĞRENCİ NO : ADI SOYADI : GRUP NO
Maltepe Üniversitesi Bilgisayar Mühendisliği Bölümü Internet ve Bilgi Teknolojileri (BİL 309) Dersi
 Dersi") Maltepe Üniversitesi Bilgisayar Mühendisliği Bölümü Internet ve Bilgi Teknolojileri (BİL 309) Dersi GENEL DERS BİLGİLERİ Öğretim Elemanı Ofis : MUH 312 : Öğr. Gör. Dr. T.Tugay BİLGİN Ofis Saatleri : Pazartesi:
Maltepe Üniversitesi Bilgisayar Mühendisliği Bölümü Internet ve Bilgi Teknolojileri (BİL 309) Dersi GENEL DERS BİLGİLERİ Öğretim Elemanı Ofis : MUH 312 : Öğr. Gör. Dr. T.Tugay BİLGİN Ofis Saatleri : Pazartesi:
YAPIM YÖNETİMİ - EKONOMİSİ 03. İşler veya eylemler olası olan zaman ve mekanının tamamını kullanacaktır.
 İNŞAAT PROJELERİNİN YÖNETİMİNDE FİZİBİLİTE ÇALIŞMASI İnşaat projelerinin yönetimi ve kurallar Parkinson Kuralı İşler veya eylemler olası olan zaman ve mekanının tamamını kullanacaktır. Peter İlkesi Bireyler
İNŞAAT PROJELERİNİN YÖNETİMİNDE FİZİBİLİTE ÇALIŞMASI İnşaat projelerinin yönetimi ve kurallar Parkinson Kuralı İşler veya eylemler olası olan zaman ve mekanının tamamını kullanacaktır. Peter İlkesi Bireyler
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2)
") YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
MONTAJ MODELLEME ( ASSEMBLY MODELING)
") MONTAJ MODELLEME ( ASSEMBLY MODELING) Bilgisayar destekli çizim araçlarında temel montaj modelleme 3 yöntem ile yapılır. 1. YUKARIDAN AŞAĞIYA (TOP-DOWN) MODELLEME: Bu montaj tekniği daha çok, montajı oluşturan
MONTAJ MODELLEME ( ASSEMBLY MODELING) Bilgisayar destekli çizim araçlarında temel montaj modelleme 3 yöntem ile yapılır. 1. YUKARIDAN AŞAĞIYA (TOP-DOWN) MODELLEME: Bu montaj tekniği daha çok, montajı oluşturan
AFYON KOCATEPE ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ MAKİNE MÜHENDİSLİĞİ ANABİLİM DALI BAŞKANLIĞI YÜKSEK LİSANS PROGRAMI
 YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL ADI KREDİSİ* MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL ADI KREDİSİ* MKM-5502 UZMANLIK
YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL ADI KREDİSİ* MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL ADI KREDİSİ* MKM-5502 UZMANLIK
SAYISAL ÇÖZÜMLEME. Yrd.Doç.Dr.Esra Tunç Görmüş. 1.Hafta
 SAYISAL ÇÖZÜMLEME Yrd.Doç.Dr.Esra Tunç Görmüş 1.Hafta Sayısal çözümleme nümerik analiz nümerik çözümleme, approximate computation mühendislikte sayısal yöntemler Computational mathematics Numerical analysis
SAYISAL ÇÖZÜMLEME Yrd.Doç.Dr.Esra Tunç Görmüş 1.Hafta Sayısal çözümleme nümerik analiz nümerik çözümleme, approximate computation mühendislikte sayısal yöntemler Computational mathematics Numerical analysis
Kavramsal Tasarım - I
 Kavramsal Tasarım - I 25.12.2017 1 Kavramsal Tasarımlar Geliştirme ve Geçerli Kılma 6. Kavramsal Tasarım a. Fonksiyon yapısı b. Metodik kısmi çözümler geliştirme i. Etkileşimli yöntemler ii. Sezgisel (Heuristik)
Kavramsal Tasarım - I 25.12.2017 1 Kavramsal Tasarımlar Geliştirme ve Geçerli Kılma 6. Kavramsal Tasarım a. Fonksiyon yapısı b. Metodik kısmi çözümler geliştirme i. Etkileşimli yöntemler ii. Sezgisel (Heuristik)
BULANIK MANTIK DENETLEYİCİLERİ. Bölüm-4 Bulanık Çıkarım
 BULANIK MANTIK DENETLEYİCİLERİ Bölüm-4 Bulanık Çıkarım 1 Bulanık Çıkarım Bölüm 4 : Hedefleri Bulanık kuralların ve bulanık bilgi tabanlarının nasıl oluşturulacağını anlamak. Gerçekte bulanık muhakeme olan
BULANIK MANTIK DENETLEYİCİLERİ Bölüm-4 Bulanık Çıkarım 1 Bulanık Çıkarım Bölüm 4 : Hedefleri Bulanık kuralların ve bulanık bilgi tabanlarının nasıl oluşturulacağını anlamak. Gerçekte bulanık muhakeme olan
BİLGİSAYAR DESTEKLİ ÖĞRETİM GENEL BAKIŞ
 BİLGİSAYAR DESTEKLİ ÖĞRETİM GENEL BAKIŞ Bilgi Çağı gereksinimleri Shift Happens: http://www.youtube.com/watch?v=ejpsqeqbh4o&featur e=related Öğretim Teknolojisi ne yapar? Öğretim, okullarda gerçekleştirilen
BİLGİSAYAR DESTEKLİ ÖĞRETİM GENEL BAKIŞ Bilgi Çağı gereksinimleri Shift Happens: http://www.youtube.com/watch?v=ejpsqeqbh4o&featur e=related Öğretim Teknolojisi ne yapar? Öğretim, okullarda gerçekleştirilen
Hakkımızda ECOFİLO KİMDİR? Değerlerimiz
 Hakkımızda Değerlerimiz ECOFİLO KİMDİR? 01 Müşterilerimizin ihtiyaçlarına odaklanır, uzun vadeli güvene dayalı ilişkiler kurarız. Müşterilerimiz için değer katacak ve işlerini kolaylaştıracak çözümler
Hakkımızda Değerlerimiz ECOFİLO KİMDİR? 01 Müşterilerimizin ihtiyaçlarına odaklanır, uzun vadeli güvene dayalı ilişkiler kurarız. Müşterilerimiz için değer katacak ve işlerini kolaylaştıracak çözümler
Online teknik sayfa ACS36-K1K0-K01 ACS/ACM36 MUTLAK ENKODER
 Online teknik sayfa ACS36-K1K0-K01 ACS/ACM36 A B C D E F Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Devir başına adım sayısı Devir sayısı Sipariş bilgileri Tip Stok no. ACS36-K1K0-K01
Online teknik sayfa ACS36-K1K0-K01 ACS/ACM36 A B C D E F Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Devir başına adım sayısı Devir sayısı Sipariş bilgileri Tip Stok no. ACS36-K1K0-K01
S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü
 MAK-407 Müh. Tas. I S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A-ġubesi B-ġubesi
MAK-407 Müh. Tas. I S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A-ġubesi B-ġubesi
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
Toprak suyunun kuyulardan çekilmesi için otomasyon çözümü
 Toprak suyunun kuyulardan çekilmesi için otomasyon çözümü Phoenix Contact Elektronik Tic. Ltd. Şti. Kısıklı Mah. Hanım Seti Sok. No:38/A 34692 B. Çamlıca - Üsküdar İstanbul/Türkiye Mersis:0729002180800018
Toprak suyunun kuyulardan çekilmesi için otomasyon çözümü Phoenix Contact Elektronik Tic. Ltd. Şti. Kısıklı Mah. Hanım Seti Sok. No:38/A 34692 B. Çamlıca - Üsküdar İstanbul/Türkiye Mersis:0729002180800018
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
YZM 3217 YAPAY ZEKA DERS#6: MANTIK
 YZM 3217 YAPAY ZEKA DERS#6: MANTIK Önermeler Doğru veya yanlış değer alabilen ifadelerdir Bir önerme hem doğru hem de yanlış olamaz Bir önerme kısmen doğru yada kısmen yanlış olamaz Örnekler: Dünya yuvarlaktır.
YZM 3217 YAPAY ZEKA DERS#6: MANTIK Önermeler Doğru veya yanlış değer alabilen ifadelerdir Bir önerme hem doğru hem de yanlış olamaz Bir önerme kısmen doğru yada kısmen yanlış olamaz Örnekler: Dünya yuvarlaktır.
DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Programlama Dillerinin Prensipleri BİM-323 3/II 3+0+0 3 4 Dersin
DENİZ HARP OKULU BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Programlama Dillerinin Prensipleri BİM-323 3/II 3+0+0 3 4 Dersin
Fizyoterapist Hareketlerinin Modellenmesi Amaçlı Model Referans Uyarlamalı Kontrolör Tasarımı
 Otomatik ontrol Ulusal Toplantısı, TO3, 6-8 Eylül 3, Malatya izyoterapist Hareketlerinin Modellenmesi Amaçlı Model Referans Uyarlamalı ontrolör Tasarımı Barış Can Yalçın, Erhan Akdoğan, Celal Sami Tüfekci
Otomatik ontrol Ulusal Toplantısı, TO3, 6-8 Eylül 3, Malatya izyoterapist Hareketlerinin Modellenmesi Amaçlı Model Referans Uyarlamalı ontrolör Tasarımı Barış Can Yalçın, Erhan Akdoğan, Celal Sami Tüfekci
AFYON KOCATEPE ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ MAKİNE MÜHENDİSLİĞİ ANABİLİM DALI BAŞKANLIĞI YÜKSEK LİSANS PROGRAMI
 YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL MKM-5502 UZMANLIK ALAN DERSİ Z 8 0 8
YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL MKM-5502 UZMANLIK ALAN DERSİ Z 8 0 8
Koru1000. beklentilerinizin ötesinde!
 Koru1000 Koru1000 beklentilerinizin ötesinde! 2017 Referanslarımız; 5 10 15 bar 16 Koru1000 Ölçemezsen, Yönetemezsin! 4 Koru1000 bir ENVEST ürünüdür. envest ba k y y! Envest, enerji ve su verimliliğini
Koru1000 Koru1000 beklentilerinizin ötesinde! 2017 Referanslarımız; 5 10 15 bar 16 Koru1000 Ölçemezsen, Yönetemezsin! 4 Koru1000 bir ENVEST ürünüdür. envest ba k y y! Envest, enerji ve su verimliliğini
C PROGRAMLAMA YRD.DOÇ.DR. BUKET DOĞAN PROGRAM - ALGORİTMA AKIŞ ŞEMASI
 C PROGRAMLAMA DİLİ YRD.DOÇ.DR. BUKET DOĞAN 1 PROGRAM - ALGORİTMA AKIŞ ŞEMASI Program : Belirli bir problemi çözmek için bir bilgisayar dili kullanılarak yazılmış deyimler dizisi. Algoritma bir sorunun
C PROGRAMLAMA DİLİ YRD.DOÇ.DR. BUKET DOĞAN 1 PROGRAM - ALGORİTMA AKIŞ ŞEMASI Program : Belirli bir problemi çözmek için bir bilgisayar dili kullanılarak yazılmış deyimler dizisi. Algoritma bir sorunun