Çoklu Kordinat Sistemi
|
|
|
- Ilhami Kıraç
- 10 yıl önce
- İzleme sayısı:
Transkript
1 Çoklu Kordinat Sistemi Uçak pistte durduğu zaman burnunun kuleye göre kordinatı: (50, 5, 0), buna karşın uçağın kordinatlarına göre pozisyonu ise:(0,0,0). Benzer bir biçimde, kulenin tabanı kule kordinat sistemine göre (0,0,0) iken uçak kordinatlarına göre ise (0, -5, 50) dır. 1

2 Çoklu Kordinat Sistemi Uçak havalansa bile uçak burnunun poziyonu uçak kordinat sistemine göre hala (0,0,0) iken, hareketten dolayı kuleye göre değişen konumlara gelir.yukarıda ki örneğe göre uçak burnunun pozisyonu kuleye göre konumu: (30, 15, 10). 2

3 Çoklu Kordinat Sistemi Robotun orjini dünya (w) kordinatlarına göre (0,3,0) noktasıdır x,y ve z eksenleri her iki koordinat sistemi içinde paraleldir. 3

4 Örnek Dünya kordinatlarını robot kordinatlarına çevirmenin en basit yolu dünya kordinatlarına göre y den 3 çıkarmaktır. Alternatif olarak dünya kordinatlarına göre bir noktanın robot kordinatlarına dönüştürmenin yolu o noktayı donüşüm matrisi ile önden çarpmaktır (to pre-multiply). 4 BLM-417 (2 ve 3)

5 Örnek 2 Öteleme ile birbirinden ayrılan iki çerçeve. Araba (c) çerçevesinden dağ (m) çerçevesini elde etmek için, arabanın X ekseninde 5 birim, Y ekseninde -4 birim ve Z sinde -1 birim öteleme yapmak gerekir. 5


6 Örnek 3 Örnek noktaların dağ kordinatlarından araba kordinatlarına çevirilmesi. Notasyon 6

7 erçeveler arası dönüş (Rotation between frames) K kordinat çerçevesinin J ye çevirmek için Z ekseninde dönüş matrisi ile, J de bulunan bir noktayı önden çarpılır(pre-multiply). Sonuçta ilgili noktanın K kordinat sistemindeki yeri bulunur. K kordinat çerçevesini J kordinat çerçevesine dönüştürmek için K nın z ekseninde (-90) derece dönüş yapılır. 7
")
8 K kordinat çerçevesini J ye dönüştür. J de bulunan bir noktayı K kordinat çerçevesine çevirmek için, bu nokta matris ile çarpılır : 8

9 Örnek 3 Hareketli eksenleri kullanarak dönüşüm yapma Dünya kordinatlarını (w) tutaç (g) kordinatlarına çevirmek için x w de -90 o dönüş. Çerçeve 1 oluştu. Yeni eksenler (x 1, y 1,z 1 ) z 1 de -90 o derece dön. Çerçeve 2 oluştu. (x 2, y 2,z 2 ) ötele (0,0,5) 9
 z 1 de -90 o derece dön.")
10 Örnek 3 Hareketli eksenleri kullanarak dönüşüm yapma Oluşan matrisler: Örnek olarak (1, 2, 3) noktası tutaç (g) kordinatlarından dünya (w) kordinatlarına dönüşüm matrisinin önden çarptırılması ile elde edilir: 10

11 Örnek 4 Sabit Eksen Kordinatları Rot x(-90) then Rot y (-90), then Trans(0,5,0) dünya kordinatlarına göre: Sabit eksene göre tersten hareket edilir: :Trans (0,5,0) * Rot y (- 90) * Rot x(-90). 11
 * Rot y (- 90) *")
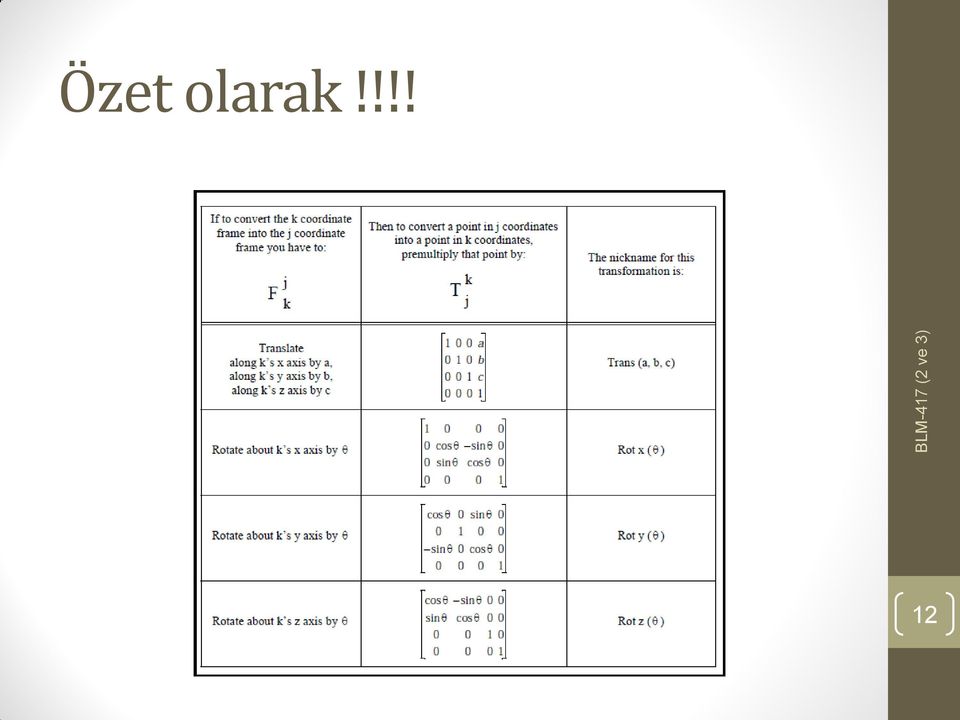
12 Özet olarak!!!! 12
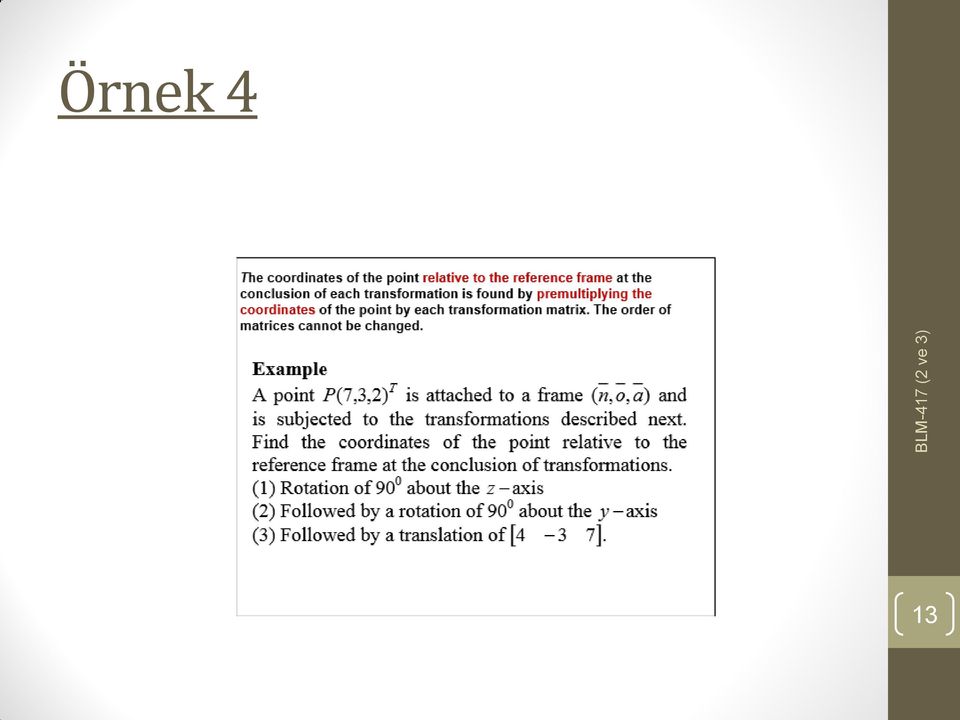
13 Örnek 4 13
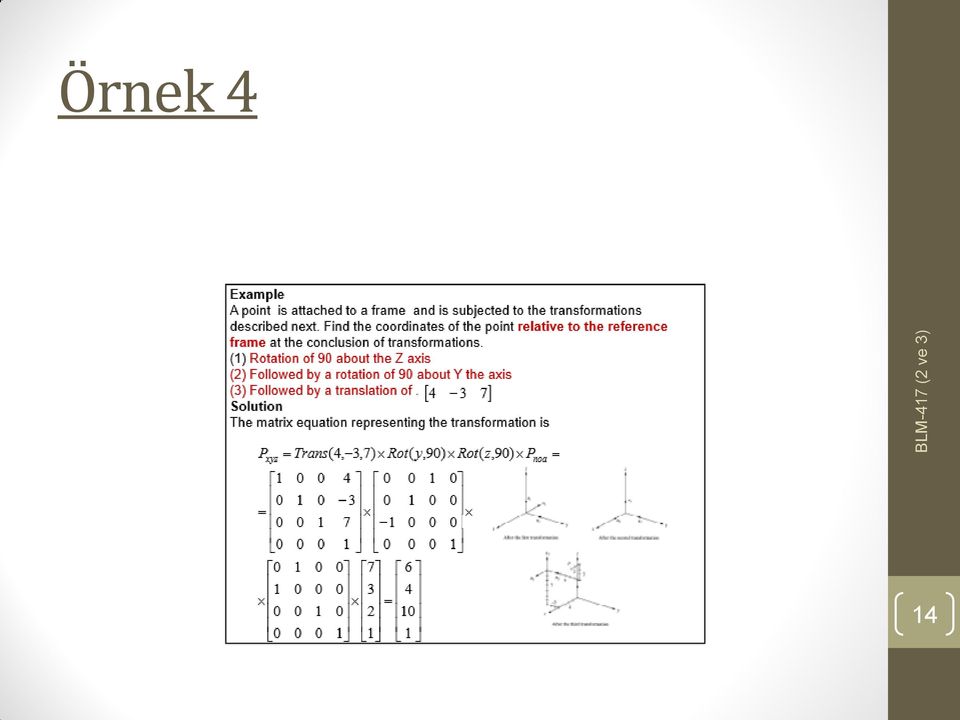
14 Örnek 4 14
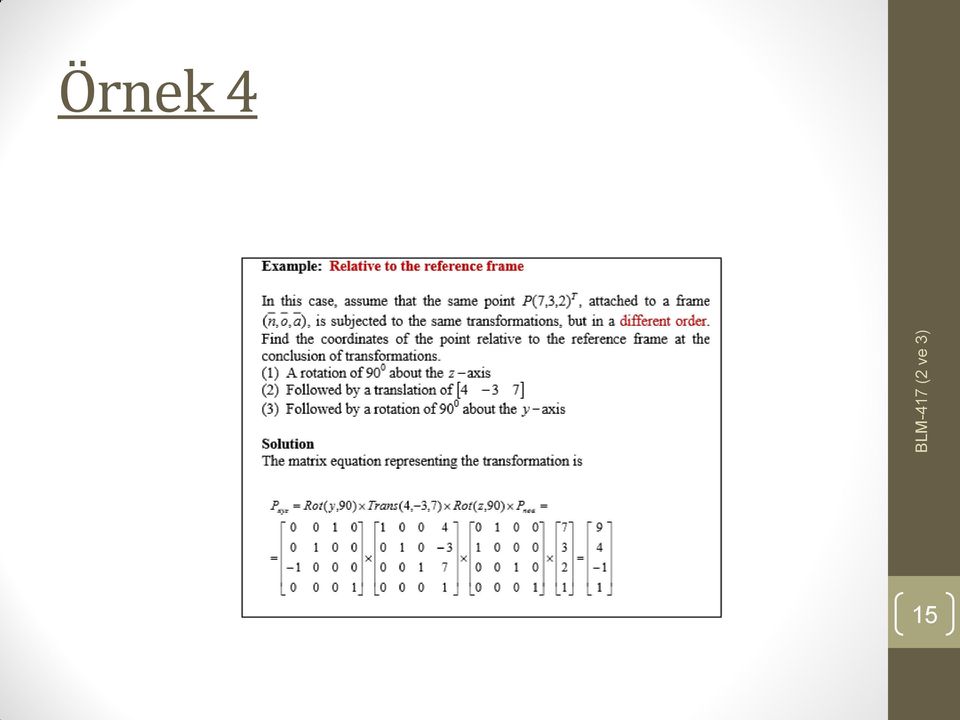
15 Örnek 4 15
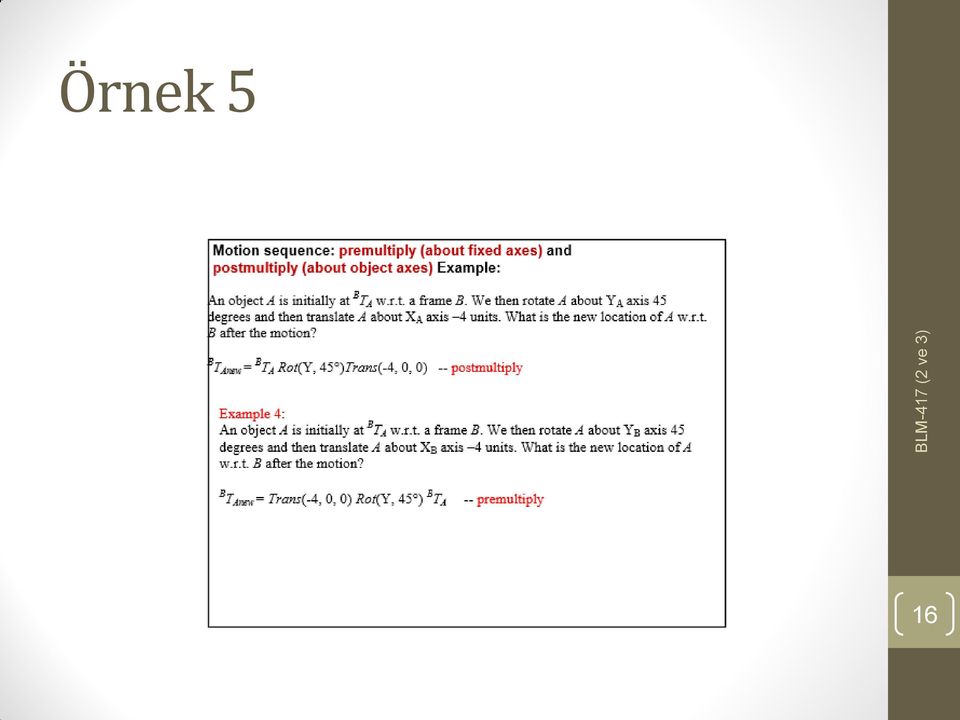
16 Örnek 5 16
 17")
17 Kinematik Analiz ve Pozisyon belirleme Düz Kinematik ( Forward Kinematics) 17
")
18 Düz Kinematikler Soru : Düz kinematik problemi nedir? Cevap : Verilen eklem değişken değerleri için sonlandırıcının konumunu ve yönelimini belirlemek.

19 Düz Kinematikler Soru : Eklem değişkeni nedir? Cevap : 1.Döner eklemler için uzuvlar arasındaki açı 2.Kayar eklemler için uzvun uzanma miktarı q i i d i döner kayar eklem eklem için için

20 Düz Kinematikler n+1 uzva sahip kinematik zincir oluşturan bir manipülatörümüz olduğunu düşünelim. Uzuv i-1 Eklem i Uzuv i Eklem i+1 Eklem i-1 Eklem 2 Uzuv 1 Eklem n Uzuv n Eklem 1 Uzuv 0

21 Düz Kinematikler Bu kinematik zincire bağlı olarak sonlandırıcının konumunu ve yönelimini temel(base) koordinat çerçevesinde şu şekilde ifade edebiliriz. H T n T 1. T 2... T n n 1 21
22 Örnek 6 22
23 Örnek 6 Let s begin by just looking at Figure again and considering the case where the joint is not rotated at all. In this case, to convert a point from gripper coordinates to world coordinates all we do is add L1+L2 to whatever the x value is. e.g., suppose the * is located at (4, 3, 0) in gripper coordinates. Then it s obviously located at (4+L1+L2, 3, 0) in world coordinates. But wait! To convert from gripper to world coordinates isn t as simple as that. Because if the joint is rotated as shown in Figure 27, then it s no longer a simple addition of L1+L2. 23
24 Örnek 6 But of course, this only moves us from world coordinates to joint coordinates. We wanted to move our frame from world coordinates to gripper coordinates. Once we have a frame in joint coordinates, moving it to gripper coordinates is simply a translation of [L2, 0, 0]. So we need to multiply the two matrices above by Trans[L2, 0, 0]. 24
25 Örnek 6 Remember that we computed how to move a frame from world coordinates to gripper coordinates. Which turns points in gripper coordinates into points in world coordinates. Wow! Figure 30 is actually exactly what we predicted it would be. Look at it. It s the matrix Trans(L1+L2, 0, 0). 25
26 Düz Kinematik (a) Cartesian (gantry, rectangular) coordinates. (b) Cylindrical coordinates. (c) Spherical coordinates. (d) Articulated (anthropomorphic, or all-revolute) coordinates. 26
27 Kartezyan Bütün eklemler doğrusal R T P T cart P P x P y z 1 27
28 Silindirik Kordinatlar 2 Doğrusal 1 Döner Eklem 28 BLM-417 (2 ve 3),0,0) )Trans(, )Rot( Trans(0,0, ),, ( r z l l r T T cyl P R l rs C S rc S C T T cyl P R
29 Yönelme tabanlı Düz Kinematik Roll, Pitch, Yaw (RPY) angles Euler angles Articulated joints 29
CIM - Computer Integrated Manufacturing
 CIM - Computer Integrated Manufacturing Ders 7 Scorbase - Robocell Scorbase Nedir? SCORBASE, ASRS ve ER-4U robotunu kullanmak, idare etmek ve yönetmek için kullanılan yazılımdır. 2 / 13 ER-4U Kimdir? Uzuvları
CIM - Computer Integrated Manufacturing Ders 7 Scorbase - Robocell Scorbase Nedir? SCORBASE, ASRS ve ER-4U robotunu kullanmak, idare etmek ve yönetmek için kullanılan yazılımdır. 2 / 13 ER-4U Kimdir? Uzuvları
için en uygun robot kol olarak belirlenmiştir. Gerek hızı gerekse hassasiyeti, uygulamalar için yeterli verimi sağlamaktadır.
 . GİRİŞ Savunma ve Endüstriyel sanayide yaşanan gelişmeler, insan gücü maliyetlerinin düşürülmesi ve kalite arttırılmasının amaçlanması, insanları robot teknolojilerini kullanmaya zorunlu bırakmıştır.
. GİRİŞ Savunma ve Endüstriyel sanayide yaşanan gelişmeler, insan gücü maliyetlerinin düşürülmesi ve kalite arttırılmasının amaçlanması, insanları robot teknolojilerini kullanmaya zorunlu bırakmıştır.
MKT 2134 ENDÜSTRİYEL ROBOTLAR
 MKT 2134 ENDÜSTRİYEL ROBOTLAR Robotun Tanımı : Amerika Robot Enstitüsü (1979) robotu, malzemeleri, araçları, parçaları hareket ettirmek için dizayn edilmiş programlanabilen çok fonksiyonlu manipülatörler
MKT 2134 ENDÜSTRİYEL ROBOTLAR Robotun Tanımı : Amerika Robot Enstitüsü (1979) robotu, malzemeleri, araçları, parçaları hareket ettirmek için dizayn edilmiş programlanabilen çok fonksiyonlu manipülatörler
SBR331 Egzersiz Biyomekaniği
 SBR331 Egzersiz Biyomekaniği Açısal Kinematik 1 Angular Kinematics 1 Serdar Arıtan [email protected] Mekanik bilimi hareketli bütün cisimlerin hareketlerinin gözlemlenebildiği en asil ve kullanışlı
SBR331 Egzersiz Biyomekaniği Açısal Kinematik 1 Angular Kinematics 1 Serdar Arıtan [email protected] Mekanik bilimi hareketli bütün cisimlerin hareketlerinin gözlemlenebildiği en asil ve kullanışlı
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
Robotik Sistemlerine Giriş. Yard. Doç. Dr. Hasan TİRYAKİ
 Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
Robotik Sistemlerine Giriş. Yard. Doç. Dr. Hasan TİRYAKİ
 Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
1. GİRİŞ 1.1. ROBOTLAR
 GİRİŞ ROBOTAR Programlanabilir olmalı, Çok esnek programlar olmalı, Kendi kendine ve çevresine göre program seçebilme eteneğine sahip olmalı (Karar verebilmeli) Eğer mekanik cihazlarda bu üç özellik varsa
GİRİŞ ROBOTAR Programlanabilir olmalı, Çok esnek programlar olmalı, Kendi kendine ve çevresine göre program seçebilme eteneğine sahip olmalı (Karar verebilmeli) Eğer mekanik cihazlarda bu üç özellik varsa
 ANKARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ YÜKSEK LİSANS TEZİ ALTI EKSENLİ ROBOT KOLUN HAREKETSEL KARAKTERİSTLİĞİNİN GÖRSEL PROGRAMLANMASI VE GERÇEK ZAMANLI UYGULAMALAR Mehmet Serdar GÜZEL BİLGİSAYAR
ANKARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ YÜKSEK LİSANS TEZİ ALTI EKSENLİ ROBOT KOLUN HAREKETSEL KARAKTERİSTLİĞİNİN GÖRSEL PROGRAMLANMASI VE GERÇEK ZAMANLI UYGULAMALAR Mehmet Serdar GÜZEL BİLGİSAYAR
Euler Bilekli Scara Robot Kolu Ġçin Kinematik Analiz Yazılımı GeliĢtirilmesi
 6 th International Advanced Technologies Symposium (IATS 11), 16-18 May 2011, Elazığ, Turkey Euler Bilekli Scara Robot Kolu Ġçin Kinematik Analiz Yazılımı GeliĢtirilmesi C. Közkurt 1, M. Soyaslan 2 GaziosmanpaĢa
6 th International Advanced Technologies Symposium (IATS 11), 16-18 May 2011, Elazığ, Turkey Euler Bilekli Scara Robot Kolu Ġçin Kinematik Analiz Yazılımı GeliĢtirilmesi C. Közkurt 1, M. Soyaslan 2 GaziosmanpaĢa
a, ı ı o, u u e, i i ö, ü ü
 Possessive Endings In English, the possession of an object is described by adding an s at the end of the possessor word separated by an apostrophe. If we are talking about a pen belonging to Hakan we would
Possessive Endings In English, the possession of an object is described by adding an s at the end of the possessor word separated by an apostrophe. If we are talking about a pen belonging to Hakan we would
T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
 T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ 5 EKSENLİ ROBOT KOLUNUN YÖRÜNGE PLANLAMASI ve DENEYSEL UYGULAMASI Kenan KILIÇASLAN DOKTORA SEMİNERİ MAKİNA MÜHENDİSLİĞİ ANABİLİM DALI YÖNETİCİ Yrd.Doç.Dr.
T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ 5 EKSENLİ ROBOT KOLUNUN YÖRÜNGE PLANLAMASI ve DENEYSEL UYGULAMASI Kenan KILIÇASLAN DOKTORA SEMİNERİ MAKİNA MÜHENDİSLİĞİ ANABİLİM DALI YÖNETİCİ Yrd.Doç.Dr.
AB surecinde Turkiyede Ozel Guvenlik Hizmetleri Yapisi ve Uyum Sorunlari (Turkish Edition)
") AB surecinde Turkiyede Ozel Guvenlik Hizmetleri Yapisi ve Uyum Sorunlari (Turkish Edition) Hakan Cora Click here if your download doesn"t start automatically AB surecinde Turkiyede Ozel Guvenlik Hizmetleri
AB surecinde Turkiyede Ozel Guvenlik Hizmetleri Yapisi ve Uyum Sorunlari (Turkish Edition) Hakan Cora Click here if your download doesn"t start automatically AB surecinde Turkiyede Ozel Guvenlik Hizmetleri
Virtualmin'e Yeni Web Sitesi Host Etmek - Domain Eklemek
 Yeni bir web sitesi tanımlamak, FTP ve Email ayarlarını ayarlamak için yapılması gerekenler Öncelikle Sol Menüden Create Virtual Server(Burdaki Virtual server ifadesi sizi yanıltmasın Reseller gibi düşünün
Yeni bir web sitesi tanımlamak, FTP ve Email ayarlarını ayarlamak için yapılması gerekenler Öncelikle Sol Menüden Create Virtual Server(Burdaki Virtual server ifadesi sizi yanıltmasın Reseller gibi düşünün
12. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI. [email protected]
 1. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI [email protected] Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi DIVIDED DIFFERENCE INTERPOLATION Forward Divided Differences
1. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI [email protected] Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi DIVIDED DIFFERENCE INTERPOLATION Forward Divided Differences
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu [email protected] 22.2.219 Serbestlik derecesi Bir sistemin serbestlik
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu [email protected] 22.2.219 Serbestlik derecesi Bir sistemin serbestlik
ingilizce.com-müşterilerle En çok kullanılan Kelime ve Deyimler-Top words and phrases to use with customers
 The Top words and phrases to use with customers Müşterilerle En Çok Kullanılan Kelime ve Deyimler Definitely Kesinlikle Surely Tabii! Kesinlikle Absolutely Muhakkak Kesinlikle Certainly Elbette PHRASES
The Top words and phrases to use with customers Müşterilerle En Çok Kullanılan Kelime ve Deyimler Definitely Kesinlikle Surely Tabii! Kesinlikle Absolutely Muhakkak Kesinlikle Certainly Elbette PHRASES
SBA/ANR 2016 Spor Biyomekaniği ( Bahar) Ders 3: Açısal Kinematik
 Ders 3: Açısal Kinematik") SBA/ANR 2016 Spor Biyomekaniği (2016-2017 Bahar) Ders 3: Açısal Kinematik Arif Mithat AMCA [email protected] 1 Hareket Türleri Doğrusal Hareket Düz bir çizgi ya da eğri üzerinde olan harekettir.
SBA/ANR 2016 Spor Biyomekaniği (2016-2017 Bahar) Ders 3: Açısal Kinematik Arif Mithat AMCA [email protected] 1 Hareket Türleri Doğrusal Hareket Düz bir çizgi ya da eğri üzerinde olan harekettir.
D-Link DSL 500G için ayarları
 Celotex 4016 YAZILIM 80-8080-8081 İLDVR HARDWARE YAZILIM 80-4500-4600 DVR2000 25 FPS YAZILIM 5050-5555-1999-80 EX-3004 YAZILIM 5555 DVR 8008--9808 YAZILIM 80-9000-9001-9002 TE-203 VE TE-20316 SVDVR YAZILIM
Celotex 4016 YAZILIM 80-8080-8081 İLDVR HARDWARE YAZILIM 80-4500-4600 DVR2000 25 FPS YAZILIM 5050-5555-1999-80 EX-3004 YAZILIM 5555 DVR 8008--9808 YAZILIM 80-9000-9001-9002 TE-203 VE TE-20316 SVDVR YAZILIM
WEEK 11 CME323 NUMERIC ANALYSIS. Lect. Yasin ORTAKCI.
 WEEK 11 CME323 NUMERIC ANALYSIS Lect. Yasin ORTAKCI [email protected] 2 INTERPOLATION Introduction A census of the population of the United States is taken every 10 years. The following table
WEEK 11 CME323 NUMERIC ANALYSIS Lect. Yasin ORTAKCI [email protected] 2 INTERPOLATION Introduction A census of the population of the United States is taken every 10 years. The following table
5 SERBESTLİK DERECELİ ROBOT KOLUNUN KİNEMATİK HESAPLAMALARI VE PID İLE YÖRÜNGE KONTROLÜ
 5 SERBESTLİK DERECELİ ROBOT KOLUNUN KİNEMATİK HESAPLAMALARI VE PID İLE YÖRÜNGE KONTROLÜ Fatih Pehlivan * Arif Ankaralı Karabük Üniversitesi Karabük Üniversitesi Karabük Karabük Özet Bu çalışmada, öncelikle
5 SERBESTLİK DERECELİ ROBOT KOLUNUN KİNEMATİK HESAPLAMALARI VE PID İLE YÖRÜNGE KONTROLÜ Fatih Pehlivan * Arif Ankaralı Karabük Üniversitesi Karabük Üniversitesi Karabük Karabük Özet Bu çalışmada, öncelikle
Exercise 2 Dialogue(Diyalog)
") Going Home 02: At a Duty-free Shop Hi! How are you today? Today s lesson is about At a Duty-free Shop. Let s make learning English fun! Eve Dönüş 02: Duty-free Satış Mağazasında Exercise 1 Vocabulary and
Going Home 02: At a Duty-free Shop Hi! How are you today? Today s lesson is about At a Duty-free Shop. Let s make learning English fun! Eve Dönüş 02: Duty-free Satış Mağazasında Exercise 1 Vocabulary and
Electronic Letters on Science & Engineering 1(1) 2005 Available online at www.e-lse.org
 2005 Available online at www.e-lse.org") Electronic Letters on Science & Engineering 1(1) 2005 Available online at www.e-lse.org Solution of Forward Kinematic for Five Axis Robot Arm using ANN A. Mühürcü 1 1 Sakarya University, Electrical-Electronical
Electronic Letters on Science & Engineering 1(1) 2005 Available online at www.e-lse.org Solution of Forward Kinematic for Five Axis Robot Arm using ANN A. Mühürcü 1 1 Sakarya University, Electrical-Electronical
Yüz Tanımaya Dayalı Uygulamalar. (Özet)
") 4 Yüz Tanımaya Dayalı Uygulamalar (Özet) Günümüzde, teknolojinin gelişmesi ile yüz tanımaya dayalı bir çok yöntem artık uygulama alanı bulabilmekte ve gittikçe de önem kazanmaktadır. Bir çok farklı uygulama
4 Yüz Tanımaya Dayalı Uygulamalar (Özet) Günümüzde, teknolojinin gelişmesi ile yüz tanımaya dayalı bir çok yöntem artık uygulama alanı bulabilmekte ve gittikçe de önem kazanmaktadır. Bir çok farklı uygulama
BBC English in Daily Life
 İçindekiler Lesson one - Ders 1:... 2... 2 Lesson Two - Ders 2:... 2... 3 Lesson Three - Ders 3:... 3... 3 Lesson Four - Ders 4:... 4... 4 Lesson Five - Ders 5:... 4... 4 Lesson Six - Ders 6:... 5... 5
İçindekiler Lesson one - Ders 1:... 2... 2 Lesson Two - Ders 2:... 2... 3 Lesson Three - Ders 3:... 3... 3 Lesson Four - Ders 4:... 4... 4 Lesson Five - Ders 5:... 4... 4 Lesson Six - Ders 6:... 5... 5
ENDÜSTRĐYEL ROBOTLARIN YAPILARI, KULLANIM ALANLARI VE MARKET ĐSTATĐSTĐKLERĐ
 ENDÜSTRĐYEL ROBOTLARIN YAPILARI, KULLANIM ALANLARI VE MARKET ĐSTATĐSTĐKLERĐ Hikmet KOCA 1 Mustafa DOĞAN 2 M. Cengiz TAPLAMACIOĞLU 1 [email protected] [email protected] [email protected] 1 Elektrik-Elektronik
ENDÜSTRĐYEL ROBOTLARIN YAPILARI, KULLANIM ALANLARI VE MARKET ĐSTATĐSTĐKLERĐ Hikmet KOCA 1 Mustafa DOĞAN 2 M. Cengiz TAPLAMACIOĞLU 1 [email protected] [email protected] [email protected] 1 Elektrik-Elektronik
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta)
") MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı Cuma : Robotik Sistemlere Giriş 10:00 12:50
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı Cuma : Robotik Sistemlere Giriş 10:00 12:50
Bağlaç 88 adet P. Phrase 6 adet Toplam 94 adet
 ÖNEMLİ BAĞLAÇLAR Bu liste YDS için Önemli özellikle seçilmiş bağlaçları içerir. 88 adet P. Phrase 6 adet Toplam 94 adet Bu doküman, YDS ye hazırlananlar için dinamik olarak oluşturulmuştur. 1. although
ÖNEMLİ BAĞLAÇLAR Bu liste YDS için Önemli özellikle seçilmiş bağlaçları içerir. 88 adet P. Phrase 6 adet Toplam 94 adet Bu doküman, YDS ye hazırlananlar için dinamik olarak oluşturulmuştur. 1. although
BBM Discrete Structures: Final Exam - ANSWERS Date: , Time: 15:00-17:00
 BBM 205 - Discrete Structures: Final Exam - ANSWERS Date: 12.1.2017, Time: 15:00-17:00 Ad Soyad / Name: Ögrenci No /Student ID: Question: 1 2 3 4 5 6 7 8 9 10 11 Total Points: 6 16 8 8 10 9 6 8 14 5 10
BBM 205 - Discrete Structures: Final Exam - ANSWERS Date: 12.1.2017, Time: 15:00-17:00 Ad Soyad / Name: Ögrenci No /Student ID: Question: 1 2 3 4 5 6 7 8 9 10 11 Total Points: 6 16 8 8 10 9 6 8 14 5 10
Robot Bilimi. Robotların Sınıflandırılması
 Robot Bilimi Robotların Sınıflandırılması Öğr. Gör. M. Ozan AKI r1.0 Robot Teknolojisinin Temelleri Robot bilimi, birçok mühendislik dalını kapsar. Teknoloji Düzeyi Hareket Güç Açık Çevrim Denetim Dış
Robot Bilimi Robotların Sınıflandırılması Öğr. Gör. M. Ozan AKI r1.0 Robot Teknolojisinin Temelleri Robot bilimi, birçok mühendislik dalını kapsar. Teknoloji Düzeyi Hareket Güç Açık Çevrim Denetim Dış
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi [email protected]
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi [email protected]
"IF CLAUSE KALIPLARI"
 "IF CLAUSE KALIPLARI" am / is / are doing have / has done can / have to / must / should be to do was / were did, was / were to do was / were doing had to do should do had done had been doing had had to
"IF CLAUSE KALIPLARI" am / is / are doing have / has done can / have to / must / should be to do was / were did, was / were to do was / were doing had to do should do had done had been doing had had to
İngilizce konu anlatımlarının devamı burada Tıkla! Spot On 8 Ders Kitabı Tüm Kelimeleri. How do we spell the Present Continuous Tense?
 İngilizce konu anlatımlarının devamı burada Tıkla! 1 Spot On 8 Ders Kitabı Tüm Kelimeleri 2 How do we spell the Present Continuous Tense? 3 8.Sınıf İngilizce Ders Kitabı ve Çalışma Kitabı Cevapları 4 TOO
İngilizce konu anlatımlarının devamı burada Tıkla! 1 Spot On 8 Ders Kitabı Tüm Kelimeleri 2 How do we spell the Present Continuous Tense? 3 8.Sınıf İngilizce Ders Kitabı ve Çalışma Kitabı Cevapları 4 TOO
Choreography Notes for: Usta-Çırak 2014 Schadia, all rights reserved
 5 4 Usta-Çırak Usta sen ol bu sefer çırağın ben. Yaklaşa yaklaşa mesafe kalmadı. Dünden hazırız ama cesaret olmalı Sen bana aşık ben sana aşık Ne duruyoruz ki başlasak artık? Seni çözmek için alt yazı
5 4 Usta-Çırak Usta sen ol bu sefer çırağın ben. Yaklaşa yaklaşa mesafe kalmadı. Dünden hazırız ama cesaret olmalı Sen bana aşık ben sana aşık Ne duruyoruz ki başlasak artık? Seni çözmek için alt yazı
ÜÇ ÇUBUK MEKANİZMASI
 ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 9 Stereo Görüntüleme Alp Ertürk [email protected] Tek Kamera Geometrisi??? x Tek Kamera Geometrisi Tek Kamera Geometrisi İğne Deliği Kamera Modeli ) /, / ( ),, (
Bilgisayarla Görüye Giriş Ders 9 Stereo Görüntüleme Alp Ertürk [email protected] Tek Kamera Geometrisi??? x Tek Kamera Geometrisi Tek Kamera Geometrisi İğne Deliği Kamera Modeli ) /, / ( ),, (
BBM Discrete Structures: Final Exam Date: , Time: 15:00-17:00
 BBM 205 - Discrete Structures: Final Exam Date: 12.1.2017, Time: 15:00-17:00 Ad Soyad / Name: Ögrenci No /Student ID: Question: 1 2 3 4 5 6 7 8 9 10 11 Total Points: 6 16 8 8 10 9 6 8 14 5 10 100 Score:
BBM 205 - Discrete Structures: Final Exam Date: 12.1.2017, Time: 15:00-17:00 Ad Soyad / Name: Ögrenci No /Student ID: Question: 1 2 3 4 5 6 7 8 9 10 11 Total Points: 6 16 8 8 10 9 6 8 14 5 10 100 Score:
Hafta 5 Uzamsal Filtreleme
 BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
Bilgisayar Grafikleri
 Bilgisayar Grafikleri Konular: Cismin Tanımlanması Bilindiği gibi iki boyutta noktalar x ve y olmak üzere iki boyutun koordinatları şeklinde ifade edilirler. Üç boyutta da üçüncü boyut olan z ekseni üçücü
Bilgisayar Grafikleri Konular: Cismin Tanımlanması Bilindiği gibi iki boyutta noktalar x ve y olmak üzere iki boyutun koordinatları şeklinde ifade edilirler. Üç boyutta da üçüncü boyut olan z ekseni üçücü
1 I S L U Y G U L A M A L I İ K T İ S A T _ U Y G U L A M A ( 5 ) _ 3 0 K a s ı m
 _ 3 0 K a s ı m") 1 I S L 8 0 5 U Y G U L A M A L I İ K T İ S A T _ U Y G U L A M A ( 5 ) _ 3 0 K a s ı m 2 0 1 2 CEVAPLAR 1. Tekelci bir firmanın sabit bir ortalama ve marjinal maliyet ( = =$5) ile ürettiğini ve =53 şeklinde
1 I S L 8 0 5 U Y G U L A M A L I İ K T İ S A T _ U Y G U L A M A ( 5 ) _ 3 0 K a s ı m 2 0 1 2 CEVAPLAR 1. Tekelci bir firmanın sabit bir ortalama ve marjinal maliyet ( = =$5) ile ürettiğini ve =53 şeklinde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
CHAPTER 7: DISTRIBUTION OF SAMPLE STATISTICS. Sampling from a Population
 CHAPTER 7: DISTRIBUTION OF SAMPLE STATISTICS Sampling from a Population Örnek: 2, 4, 6, 6, 7, 8 say lar ndan oluşan bir populasyonumuz olsun Bu say lardan 3 elemanl bir örneklem (sample) seçebiliriz. Bu
CHAPTER 7: DISTRIBUTION OF SAMPLE STATISTICS Sampling from a Population Örnek: 2, 4, 6, 6, 7, 8 say lar ndan oluşan bir populasyonumuz olsun Bu say lardan 3 elemanl bir örneklem (sample) seçebiliriz. Bu
DÜZLEM YÜREK MEKANİZMALARI
 DÜZLEM YÜREK MEKANİZMALARI Yüksek eleman çifti içeren mekanizmalardır. Hareket esnasında yürek ile tahrik edilen uzuv, doğrudan doğruya temasta olabilirler. Genellikle yürek ile tahrik edilen uzuv arasına
DÜZLEM YÜREK MEKANİZMALARI Yüksek eleman çifti içeren mekanizmalardır. Hareket esnasında yürek ile tahrik edilen uzuv, doğrudan doğruya temasta olabilirler. Genellikle yürek ile tahrik edilen uzuv arasına
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
LAZER SENSÖRLERLE BİR ROBOTUN DOĞAL FREKANSLARININ VE STATİK ÇÖKMELERİNİN ÖLÇÜMÜ
 327 LAZER SENSÖRLERLE BİR ROBOTUN DOĞAL FREKANSLARININ VE STATİK ÇÖKMELERİNİN ÖLÇÜMÜ Zeki KIRAL Murat AKDAĞ Levent MALGACA Hira KARAGÜLLE ÖZET Robotlar, farklı konumlarda farklı direngenliğe ve farklı
327 LAZER SENSÖRLERLE BİR ROBOTUN DOĞAL FREKANSLARININ VE STATİK ÇÖKMELERİNİN ÖLÇÜMÜ Zeki KIRAL Murat AKDAĞ Levent MALGACA Hira KARAGÜLLE ÖZET Robotlar, farklı konumlarda farklı direngenliğe ve farklı
MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR
 MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR DÜZLEMSEL MEKANİZMALAR Güç ve hareket aktarımında kullanılan önemli makine elemanlarındadır. Düzlemsel Mekanizma Tanımı Mekanik parçaların bir araya getirilmesiyle
MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR DÜZLEMSEL MEKANİZMALAR Güç ve hareket aktarımında kullanılan önemli makine elemanlarındadır. Düzlemsel Mekanizma Tanımı Mekanik parçaların bir araya getirilmesiyle
Makina Dinamiği. Yrd. Doç. Dr. Semih Sezer.
 Yrd. Doç. Dr. Semih Sezer Makina Dinamiği [email protected] Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Yrd. Doç. Dr. Semih Sezer Makina Dinamiği [email protected] Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
1- A lossless transmission line of characteristic impedance 50 ohm is to be matched to a load impedance of 100+j50 ohm using short circuited stub
 1- A lossless transmission line of characteristic impedance 50 ohm is to be matched to a load impedance of 100+j50 ohm using short circuited stub tuner. Find the required lengths using Smith Chart. Attach
1- A lossless transmission line of characteristic impedance 50 ohm is to be matched to a load impedance of 100+j50 ohm using short circuited stub tuner. Find the required lengths using Smith Chart. Attach
DÜZLEMSEL ELEKTRO-PNÖMATİK MANİPÜLATÖR TASARIMI VE KONTROLÜ
 Bu bir MMO yayınıdır DÜZLEMSEL ELEKTRO-PNÖMATİK MANİPÜLATÖR TASARIMI VE KONTROLÜ Erol UYAR 1 Mücahid CANDAN 1 Ekrem YAVUZ 1 Nail AKÇURA 1 1 Ege Üniversitesi 567 DÜZLEMSEL ELEKTRO-PNÖMATİK MANİPÜLATÖR TASARIMI
Bu bir MMO yayınıdır DÜZLEMSEL ELEKTRO-PNÖMATİK MANİPÜLATÖR TASARIMI VE KONTROLÜ Erol UYAR 1 Mücahid CANDAN 1 Ekrem YAVUZ 1 Nail AKÇURA 1 1 Ege Üniversitesi 567 DÜZLEMSEL ELEKTRO-PNÖMATİK MANİPÜLATÖR TASARIMI
YATAY VE DİKEY OLARAK KONUMLANDIRILMIŞ KRANK-BİYEL MEKANİZMASININ BİLGİSAYAR DESTEKLİ ANALİZİ
 2. Ulusal Tasarım İmalat ve Analiz Kongresi 11-12 Kasım 2010- Balıkesir YATAY VE DİKEY OLARAK KONUMLANDIRILMIŞ KRANK-BİYEL MEKANİZMASININ BİLGİSAYAR DESTEKLİ ANALİZİ Celil YAVUZ*, Murat SARIKAYA**, Mustafa
2. Ulusal Tasarım İmalat ve Analiz Kongresi 11-12 Kasım 2010- Balıkesir YATAY VE DİKEY OLARAK KONUMLANDIRILMIŞ KRANK-BİYEL MEKANİZMASININ BİLGİSAYAR DESTEKLİ ANALİZİ Celil YAVUZ*, Murat SARIKAYA**, Mustafa
DİNAMİK MEKANİK. Şekil Değiştiren Cisimler Mekaniği. Mukavemet Elastisite Teorisi Sonlu Elemanlar Analizi PARÇACIĞIN KİNEMATİĞİ
 DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
Do not open the exam until you are told that you may begin.
 ÖRNEKTİR ÖRNEKTİR ÖRNEKTİR ÖRNEKTİR ÖRNEKTİR OKAN ÜNİVERSİTESİ FEN EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ 03.11.2011 MAT 461 Fonksiyonel Analiz I Ara Sınav N. Course ADI SOYADI ÖĞRENCİ NO İMZA Do not open
ÖRNEKTİR ÖRNEKTİR ÖRNEKTİR ÖRNEKTİR ÖRNEKTİR OKAN ÜNİVERSİTESİ FEN EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ 03.11.2011 MAT 461 Fonksiyonel Analiz I Ara Sınav N. Course ADI SOYADI ÖĞRENCİ NO İMZA Do not open
AKT 305 Aktüeryal Yazılımlar Ödev 1 Yanıtları Soru 1. Create a vector x with the elements...
 AKT 305 Aktüeryal Yazılımlar Ödev 1 Yanıtları Soru 1. Create a vector x with the elements... a. 2, 4, 6, 8,...,10 >> [2:2:10] 2 4 6 8 10 b. 10, 8, 6, 4, 2, 0, -2, -4 >> [10:-2:-4] 10 8 6 4 2 0-2 -4 c.
AKT 305 Aktüeryal Yazılımlar Ödev 1 Yanıtları Soru 1. Create a vector x with the elements... a. 2, 4, 6, 8,...,10 >> [2:2:10] 2 4 6 8 10 b. 10, 8, 6, 4, 2, 0, -2, -4 >> [10:-2:-4] 10 8 6 4 2 0-2 -4 c.
Matematik Mühendisliği - Mesleki İngilizce
 Matematik Mühendisliği - Mesleki İngilizce Tanım - Definition Tanım nasıl verilmelidir? Tanım tanımlanan ismi veya sıfatı yeterince açıklamalı, gereğinden fazla detaya girmemeli ve açık olmalıdır. Bir
Matematik Mühendisliği - Mesleki İngilizce Tanım - Definition Tanım nasıl verilmelidir? Tanım tanımlanan ismi veya sıfatı yeterince açıklamalı, gereğinden fazla detaya girmemeli ve açık olmalıdır. Bir
Makina Dinamiği MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ
 MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
Properties of Regular Languages. Mart 2006 Ankara Üniversitesi Bilgisayar Mühendisliği - TY 1
 Properties of Regular Languages Mart 2006 Ankara Üniversitesi Bilgisayar Mühendisliği - TY 1 Properties of Regular Languages Pumping Lemma. Every regular language satisfies the pumping lemma. If somebody
Properties of Regular Languages Mart 2006 Ankara Üniversitesi Bilgisayar Mühendisliği - TY 1 Properties of Regular Languages Pumping Lemma. Every regular language satisfies the pumping lemma. If somebody
1. Superlative lerden sonra gelen fiil infinitive olur. ( the latest species to join the
 1. Superlative lerden sonra gelen fiil infinitive olur. ( the latest species to join the rank of ) 2. for/in/during/over/within (fidow) : last/past time olduğunda bu prepositionlar gelir. 3. Now that;
1. Superlative lerden sonra gelen fiil infinitive olur. ( the latest species to join the rank of ) 2. for/in/during/over/within (fidow) : last/past time olduğunda bu prepositionlar gelir. 3. Now that;
Kısa Program yazma-mdi
 TEZGAHIN AÇILMASI Kısa Program yazma-mdi TAKIM TUTUCUYU MAGAZİNE TAKMAK VE SÖKMEK CNC MAKİNE REFERANS VE SIFIR NOKTALARI CNC FREZEDE KOORDİNAT SİSTEMLERİ Bir CNC- Tezgahında bir iş parçasını üretebilmek
TEZGAHIN AÇILMASI Kısa Program yazma-mdi TAKIM TUTUCUYU MAGAZİNE TAKMAK VE SÖKMEK CNC MAKİNE REFERANS VE SIFIR NOKTALARI CNC FREZEDE KOORDİNAT SİSTEMLERİ Bir CNC- Tezgahında bir iş parçasını üretebilmek
a, ı ı o, u u e, i i ö, ü ü şu that (something relatively nearby) şu ekmek o that (something further away) o dondurma
 şu ekmek o that (something further away) o dondurma") Recap Çoğullar ler If the final vowel is a, ı, o or u, then use lar. limonlar, çocuklar If the final vowel is e, i, ö or ü, then use ler. zeytinler, ekmekler This, That, These and Those bu this bu limon
Recap Çoğullar ler If the final vowel is a, ı, o or u, then use lar. limonlar, çocuklar If the final vowel is e, i, ö or ü, then use ler. zeytinler, ekmekler This, That, These and Those bu this bu limon
Do not open the exam until you are told that you may begin.
 OKAN ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ MÜHENDİSLİK TEMEL BİLİMLERİ BÖLÜMÜ 2015.11.10 MAT461 Fonksiyonel Analiz I Arasınav N. Course Adi: Soyadi: Öğrenc i No: İmza: Ö R N E K T İ R S A M P L E
OKAN ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ MÜHENDİSLİK TEMEL BİLİMLERİ BÖLÜMÜ 2015.11.10 MAT461 Fonksiyonel Analiz I Arasınav N. Course Adi: Soyadi: Öğrenc i No: İmza: Ö R N E K T İ R S A M P L E
UBE Machine Learning. Kaya Oguz
 UBE 521 - Machine Learning Kaya Oguz Support Vector Machines How to divide up the space with decision boundaries? 1990s - new compared to other methods. How to make the decision rule to use with this boundary?
UBE 521 - Machine Learning Kaya Oguz Support Vector Machines How to divide up the space with decision boundaries? 1990s - new compared to other methods. How to make the decision rule to use with this boundary?
HOW TO MAKE A SNAPSHOT Snapshot Nasil Yapilir. JEFF GOERTZEN / Art director, USA TODAY
 HOW TO MAKE A SNAPSHOT Snapshot Nasil Yapilir JEFF GOERTZEN / Art director, USA TODAY HEADLINE: How many minutes a day do you or someone else walk your dog? 0 minutes 13% 1-19 minutes 24% 20-39 minutes
HOW TO MAKE A SNAPSHOT Snapshot Nasil Yapilir JEFF GOERTZEN / Art director, USA TODAY HEADLINE: How many minutes a day do you or someone else walk your dog? 0 minutes 13% 1-19 minutes 24% 20-39 minutes
DETERMINING JOINT ANGLES OF ROBOT ARM BY ARTIFICIAL NEURAL NETWORK. Muhammet Ali ARSERİM 1*, Yakup DEMİR 2
 DETERMINING JOINT ANGLES OF ROBOT ARM BY ARTIFICIAL NEURAL NETWORK Muhammet Ali ARSERİM 1*, Yakup DEMİR 2 *1 Electrical and Electronics Engineering Department, Dicle University,Diyarbakir, Turkey 2 Electrical
DETERMINING JOINT ANGLES OF ROBOT ARM BY ARTIFICIAL NEURAL NETWORK Muhammet Ali ARSERİM 1*, Yakup DEMİR 2 *1 Electrical and Electronics Engineering Department, Dicle University,Diyarbakir, Turkey 2 Electrical
Travel Getting Around
 - Location Kayboldum. Not knowing where you are Onun haritada nerede olduğunu bana gösterir misiniz? Asking for a specific location on a map ı nerede bulurum? Asking for a specific... bir banyo?... bir
- Location Kayboldum. Not knowing where you are Onun haritada nerede olduğunu bana gösterir misiniz? Asking for a specific location on a map ı nerede bulurum? Asking for a specific... bir banyo?... bir
ROBOT OTOMASYONU SAKARYA ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU. Doç.Dr. Akın Oğuz KAPTI
 ROBOT OTOMASYONU MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU Doç.Dr. Akın Oğuz KAPTI Endüstriyel Robotlar 2 Robotlar, sensörel bilgi ile çevresini algılayan, algıladıklarını yorumlayan, yapay
ROBOT OTOMASYONU MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU Doç.Dr. Akın Oğuz KAPTI Endüstriyel Robotlar 2 Robotlar, sensörel bilgi ile çevresini algılayan, algıladıklarını yorumlayan, yapay
ROBOT TEKNOLOJISI. Ege Üniversitesi Ege MYO Mekatronik Programı
 ROBOT TEKNOLOJISI Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 Robotların Yapısı Robotun Parçaları Çevre Dış sensörler Kullanıcı Programlama İç Sensörler Net Kontrol Ünitesi Mekanik Yapı Actuatorler
ROBOT TEKNOLOJISI Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 Robotların Yapısı Robotun Parçaları Çevre Dış sensörler Kullanıcı Programlama İç Sensörler Net Kontrol Ünitesi Mekanik Yapı Actuatorler
Ardunio ve Bluetooth ile RC araba kontrolü
 Ardunio ve Bluetooth ile RC araba kontrolü Gerekli Malzemeler: 1) Arduino (herhangi bir model); bizim kullandığımız : Arduino/Geniuno uno 2) Bluetooth modül (herhangi biri); bizim kullandığımız: Hc-05
Ardunio ve Bluetooth ile RC araba kontrolü Gerekli Malzemeler: 1) Arduino (herhangi bir model); bizim kullandığımız : Arduino/Geniuno uno 2) Bluetooth modül (herhangi biri); bizim kullandığımız: Hc-05
a) Present Continuous Tense (Future anlamda) I am visiting my aunt tomorrow. (Yarin halamı ziyaret ediyorum-edeceğim.)
 Present Continuous Tense (Future anlamda) I am visiting my aunt tomorrow. (Yarin halamı ziyaret ediyorum-edeceğim.)") a) Present Continuous Tense (Future anlamda) I am visiting my aunt tomorrow. (Yarin halamı ziyaret ediyorum-edeceğim.) He is having an exam on Wednesday. (Çarşamba günü sınav oluyor-olacak.) Mary is spending
a) Present Continuous Tense (Future anlamda) I am visiting my aunt tomorrow. (Yarin halamı ziyaret ediyorum-edeceğim.) He is having an exam on Wednesday. (Çarşamba günü sınav oluyor-olacak.) Mary is spending
RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK
 Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
KONU: GÖRÜNTÜ İŞLEME TABANLI 4+1 EKSENROBOT KOL TASARIMI
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM TASARIMI RAPORU KONU: GÖRÜNTÜ İŞLEME TABANLI 4+1 EKSENROBOT KOL TASARIMI G120900027 Burak YALIM G120900054 Yunus Emre SİNEKOĞLU G120900039
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM TASARIMI RAPORU KONU: GÖRÜNTÜ İŞLEME TABANLI 4+1 EKSENROBOT KOL TASARIMI G120900027 Burak YALIM G120900054 Yunus Emre SİNEKOĞLU G120900039
ihmal edilmeyecektir.
 q h q q h h q q q y z L 2 x L 1 L 1 L 2 Kolon Perde y x L 1 L 1 L 1 = 6.0 m L 2 = 4.0 m h= 3.0 m q= 50 kn (deprem) tüm kirişler üzerinde 8 kn/m lik düzgün yayılı yük (ölü), tüm döşemeler üzerinde 3 kn/m
q h q q h h q q q y z L 2 x L 1 L 1 L 2 Kolon Perde y x L 1 L 1 L 1 = 6.0 m L 2 = 4.0 m h= 3.0 m q= 50 kn (deprem) tüm kirişler üzerinde 8 kn/m lik düzgün yayılı yük (ölü), tüm döşemeler üzerinde 3 kn/m
BBS 514 YAPISAL PROGRAMLAMA (STRUCTURED PROGRAMMING)
") 1 BBS 514 YAPISAL PROGRAMLAMA (STRUCTURED PROGRAMMING) LECTURE 3: ASSIGNMENT OPERATOR Lecturer: Burcu Can BBS 514 - Yapısal Programlama (Structured Programming) 2 Lexical Elements (Sözcüksel Elemanlar)
1 BBS 514 YAPISAL PROGRAMLAMA (STRUCTURED PROGRAMMING) LECTURE 3: ASSIGNMENT OPERATOR Lecturer: Burcu Can BBS 514 - Yapısal Programlama (Structured Programming) 2 Lexical Elements (Sözcüksel Elemanlar)
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY
 EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
Sekil 1 de plani verilen radye temelin statik analizini yaparak, isletme yükleri için S11 gerilme konturunu çizdiriniz.
 Örnek 3: Sekil 1 de plani verilen radye temelin statik analizini yaparak, isletme yükleri için S11 gerilme konturunu çizdiriniz. Giris Bilgileri Sistem Geometrisi ve Eleman Bilgileri: Sekil 1 Radye temel
Örnek 3: Sekil 1 de plani verilen radye temelin statik analizini yaparak, isletme yükleri için S11 gerilme konturunu çizdiriniz. Giris Bilgileri Sistem Geometrisi ve Eleman Bilgileri: Sekil 1 Radye temel
Relative Clauses 1-3
 Relative Clauses 1-3 a man who has powerful friends things I like the world which I created the kind of person we need a place that I know something you should know a place where life is simple somebody
Relative Clauses 1-3 a man who has powerful friends things I like the world which I created the kind of person we need a place that I know something you should know a place where life is simple somebody
A ve B düğüm noktalarında X yönündeki yer değiştirmeleri ve mesnet reaksiyonlarını bulunuz.
 Problem D Eğimli Mesnetler Çelik E = 29000 ksi, Poisson oranı = 0.3 Tüm elemanların 10 feet uzunluğundadır. Yapılacaklar A ve B düğüm noktalarında X yönündeki yer değiştirmeleri ve mesnet reaksiyonlarını
Problem D Eğimli Mesnetler Çelik E = 29000 ksi, Poisson oranı = 0.3 Tüm elemanların 10 feet uzunluğundadır. Yapılacaklar A ve B düğüm noktalarında X yönündeki yer değiştirmeleri ve mesnet reaksiyonlarını
Regresyon. Regresyon korelasyon ile yakından ilişkilidir
 Regresyon Regresyona Giriş Regresyon korelasyon ile yakından ilişkilidir Regresyon bir bağımlı değişken ile (DV) bir veya daha fazla bağımsız değişken arasındaki doğrusal ilişkiyi inceler. DV için başka
Regresyon Regresyona Giriş Regresyon korelasyon ile yakından ilişkilidir Regresyon bir bağımlı değişken ile (DV) bir veya daha fazla bağımsız değişken arasındaki doğrusal ilişkiyi inceler. DV için başka
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
Her bir şeride eş zamanlı olarak uygulanan HS20-44 kamyon yükü ve HS20-44L şerit yükünden en elverişsiz olanı için kontrol yapınız.
 Problem R Hareketli Yük Katarlı Köprü Beton Malzeme Özellikleri E = 5000 ksi, Poisson oranı = 0.2 Eleman Özellikeri Kolon A = 40 ft^2 I = 400 ft ^3 AS = 30 ft^2 Kiriş A = 35 ft^2 I = 500 ft^3 AS = 12 ft^2
Problem R Hareketli Yük Katarlı Köprü Beton Malzeme Özellikleri E = 5000 ksi, Poisson oranı = 0.2 Eleman Özellikeri Kolon A = 40 ft^2 I = 400 ft ^3 AS = 30 ft^2 Kiriş A = 35 ft^2 I = 500 ft^3 AS = 12 ft^2
My Year Manager is Sınıf Müdürüm. P.E. is on Beden eğitimi dersimin günü
 EMTRAS [Turkish] My Headteacher is Okul müdürüm My Year Manager is Sınıf Müdürüm My Form Tutor is Sınıf öğretmenim My Form is Sınıfım P.E. is on Beden eğitimi dersimin günü I must bring in a T-shirt, shorts
EMTRAS [Turkish] My Headteacher is Okul müdürüm My Year Manager is Sınıf Müdürüm My Form Tutor is Sınıf öğretmenim My Form is Sınıfım P.E. is on Beden eğitimi dersimin günü I must bring in a T-shirt, shorts
Q29.1 Dairesel bir halka şekilde görüldüğü gibi sabit bir manyetik alan içerisine yerleştiriliyor.buna göre indüksiyon emk için ne söylenebilir?
 Q29.1 Dairesel bir halka şekilde görüldüğü gibi sabit bir manyetik alan içerisine yerleştiriliyor.buna göre indüksiyon emk için ne söylenebilir? A. indüksiyon emk saat yönünde oluşur. B. indüksiyon emk
Q29.1 Dairesel bir halka şekilde görüldüğü gibi sabit bir manyetik alan içerisine yerleştiriliyor.buna göre indüksiyon emk için ne söylenebilir? A. indüksiyon emk saat yönünde oluşur. B. indüksiyon emk
BBM Discrete Structures: Midterm 2 Date: , Time: 16:00-17:30. Question: Total Points: Score:
 BBM 205 - Discrete Structures: Midterm 2 Date: 8.12.2016, Time: 16:00-17:30 Ad Soyad / Name: Ögrenci No /Student ID: Question: 1 2 3 4 5 6 7 Total Points: 12 22 10 10 15 16 15 100 Score: 1. (12 points)
BBM 205 - Discrete Structures: Midterm 2 Date: 8.12.2016, Time: 16:00-17:30 Ad Soyad / Name: Ögrenci No /Student ID: Question: 1 2 3 4 5 6 7 Total Points: 12 22 10 10 15 16 15 100 Score: 1. (12 points)
Yarışma Sınavı A ) 60 B ) 80 C ) 90 D ) 110 E ) 120. A ) 4(x + 2) B ) 2(x + 4) C ) 2 + ( x + 4) D ) 2 x + 4 E ) x + 4
 60 B ) 80 C ) 90 D ) 110 E ) 120. A ) 4(x + 2) B ) 2(x + 4) C ) 2 + ( x + 4) D ) 2 x + 4 E ) x + 4") 1 4 The price of a book is first raised by 20 TL, and then by another 30 TL. In both cases, the rate of increment is the same. What is the final price of the book? 60 80 90 110 120 2 3 5 Tim ate four more
1 4 The price of a book is first raised by 20 TL, and then by another 30 TL. In both cases, the rate of increment is the same. What is the final price of the book? 60 80 90 110 120 2 3 5 Tim ate four more
 TİMAK-Tasarım İmalat Analiz Kongresi 26-28 Nisan 2006 - BALIKESİR ÇOK YÖNLÜ TEKERLEKLERE SAHİP BİR MOBİL ROBOTUN TASARIMI VE MODELİNİN GERÇEKLEŞTİRİLMESİ Servet SOYGÜDER 1, Hasan ALLİ 1 1 Fırat Üniversitesi,
TİMAK-Tasarım İmalat Analiz Kongresi 26-28 Nisan 2006 - BALIKESİR ÇOK YÖNLÜ TEKERLEKLERE SAHİP BİR MOBİL ROBOTUN TASARIMI VE MODELİNİN GERÇEKLEŞTİRİLMESİ Servet SOYGÜDER 1, Hasan ALLİ 1 1 Fırat Üniversitesi,
ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ
 ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ 1 Önder DEMİR 2 Cengiz ŞAFAK 3 Volkan TUNALI 4 Elif Pınar HACIBEYOĞLU 1,2,3 Marmara Üniversitesi Teknik Eğitim Fakültesi, Elektronik Bilgisayar Eğitimi Bölümü, Göztepe
ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ 1 Önder DEMİR 2 Cengiz ŞAFAK 3 Volkan TUNALI 4 Elif Pınar HACIBEYOĞLU 1,2,3 Marmara Üniversitesi Teknik Eğitim Fakültesi, Elektronik Bilgisayar Eğitimi Bölümü, Göztepe
10. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 . HAFTA BLM323 SAYISAL ANALİZ Okt. Yasin ORTAKCI [email protected] Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 2- İTERATİF YÖNTEMLER Doğrusal denklem sistemlerinin çözümünde
. HAFTA BLM323 SAYISAL ANALİZ Okt. Yasin ORTAKCI [email protected] Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 2- İTERATİF YÖNTEMLER Doğrusal denklem sistemlerinin çözümünde
Get started with Google Drive
 Get started with Google Drive 1 Store any file Use Drive s 15GB of free Google storage to keep anything you want. Learn how to add a file Share files and folders Everyone can see and edit files at the
Get started with Google Drive 1 Store any file Use Drive s 15GB of free Google storage to keep anything you want. Learn how to add a file Share files and folders Everyone can see and edit files at the
Korelasyon ve Regresyon
 Korelasyon ve Regresyon Kazanımlar 1 2 3 4 5 6 Değişkenlerin ilişkisini açıklamak ve hesaplamak için Pearson korelasyon katsayısı Örneklem r ile evren korelasyonu hakkında hipotez testi yapmak Spearman
Korelasyon ve Regresyon Kazanımlar 1 2 3 4 5 6 Değişkenlerin ilişkisini açıklamak ve hesaplamak için Pearson korelasyon katsayısı Örneklem r ile evren korelasyonu hakkında hipotez testi yapmak Spearman
4. HAFTA ENM 108 BİLGİSAYAR DESTEKLİ TEKNİK RESİM. Yrd.Doç.Dr. İnan KESKİN. [email protected]
 4. HAFTA ENM 108 BİLGİSAYAR DESTEKLİ TEKNİK RESİM Yrd.Doç.Dr. İnan KESKİN [email protected] Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler Tablosu Koordinat Kullanımı...
4. HAFTA ENM 108 BİLGİSAYAR DESTEKLİ TEKNİK RESİM Yrd.Doç.Dr. İnan KESKİN [email protected] Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler Tablosu Koordinat Kullanımı...
Skecher (Çizim) Komutları
 Komutları") Skecher (Çizim) Komutları Ahmet SAN Karamürsel 2018 Sketch Oluşturma Catia programında katı model oluşturmak için öncelikle sketch oluşturmamız gerekir bu işlem sketcher araç çubuğu üzerindeki sketch ile
Skecher (Çizim) Komutları Ahmet SAN Karamürsel 2018 Sketch Oluşturma Catia programında katı model oluşturmak için öncelikle sketch oluşturmamız gerekir bu işlem sketcher araç çubuğu üzerindeki sketch ile
Korelasyon ve Regresyon
 Korelasyon ve Regresyon Kazanımlar 1 2 3 4 5 6 Değişkenlerin ilişkisini açıklamak ve hesaplamak için Pearson korelasyon katsayısı Örneklem r ile evren korelasyonu hakkında hipotez testi yapmak Spearman
Korelasyon ve Regresyon Kazanımlar 1 2 3 4 5 6 Değişkenlerin ilişkisini açıklamak ve hesaplamak için Pearson korelasyon katsayısı Örneklem r ile evren korelasyonu hakkında hipotez testi yapmak Spearman
Bölüm 6 Görüntü Onarma ve Geriçatma
 BLM429 Görüntü İşlemeye Giriş Bölüm 6 Görüntü Onarma ve Geriçatma Dr. Öğr. Üyesi Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak nesnelerin
BLM429 Görüntü İşlemeye Giriş Bölüm 6 Görüntü Onarma ve Geriçatma Dr. Öğr. Üyesi Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak nesnelerin
DESIGN AND MODEL OF A MOBILE ROBOT WITH STEERABLE OMNIDIRECTIONAL WHEELS
 Çok Yönlü Tekerleklere Sahip Bir Mobil Robotun Tasarımı ve Modelinin Gerçekleştirilmesi C.B.Ü. Fen Bilimleri Dergisi ISSN 1305-1385 C.B.U. Journal of Science 4.1 (2008) 111 120 4.1 (2008) 111 120 ÇOK YÖNLÜ
Çok Yönlü Tekerleklere Sahip Bir Mobil Robotun Tasarımı ve Modelinin Gerçekleştirilmesi C.B.Ü. Fen Bilimleri Dergisi ISSN 1305-1385 C.B.U. Journal of Science 4.1 (2008) 111 120 4.1 (2008) 111 120 ÇOK YÖNLÜ
WILLIAM SHAKESPEARE BY TERRY EAGLETON DOWNLOAD EBOOK : WILLIAM SHAKESPEARE BY TERRY EAGLETON PDF
 Read Online and Download Ebook WILLIAM SHAKESPEARE BY TERRY EAGLETON DOWNLOAD EBOOK : WILLIAM SHAKESPEARE BY TERRY EAGLETON PDF Click link bellow and free register to download ebook: WILLIAM SHAKESPEARE
Read Online and Download Ebook WILLIAM SHAKESPEARE BY TERRY EAGLETON DOWNLOAD EBOOK : WILLIAM SHAKESPEARE BY TERRY EAGLETON PDF Click link bellow and free register to download ebook: WILLIAM SHAKESPEARE
ED-7255 ( 5 eksen Robot Kol )
") ED-7255 ( 5 eksen Robot Kol ) Fast and easy interface using 3D S/W GUI Environment High level of Motion Control using Dual CPU (ARM, DSP) Smooth and delicate operation according to 5ms DSP Sampling Time
ED-7255 ( 5 eksen Robot Kol ) Fast and easy interface using 3D S/W GUI Environment High level of Motion Control using Dual CPU (ARM, DSP) Smooth and delicate operation according to 5ms DSP Sampling Time
Present continous tense
 Present continous tense This tense is mainly used for talking about what is happening now. In English, the verb would be changed by adding the suffix ing, and using it in conjunction with the correct form
Present continous tense This tense is mainly used for talking about what is happening now. In English, the verb would be changed by adding the suffix ing, and using it in conjunction with the correct form
AKÜ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 GÖRÜNTÜ İŞLEME DERS-12 YARDIMCI NOTLARI -2018 ÇALIŞMA SORULARI Soru 1: (256x256) boyutlarında gri seviye bir görüntü dosyası olan cameraman.tif dosyasını Matlab ortamında 4 eşit parçaya bölünüz. Her bir
GÖRÜNTÜ İŞLEME DERS-12 YARDIMCI NOTLARI -2018 ÇALIŞMA SORULARI Soru 1: (256x256) boyutlarında gri seviye bir görüntü dosyası olan cameraman.tif dosyasını Matlab ortamında 4 eşit parçaya bölünüz. Her bir
Engineering Mechanics: Statics in SI Units, 12e. Force Vectors
 Engineering Mechanics: Statics in SI Units, 1e orce Vectors Bölüm Hedefleri Parallelkenar kuralı Kartezyen vektörler Skaler çarpım ve iki vektör arasındaki açı Bölüm Özeti 1. Skalerler ve vektörler. Vectörel
Engineering Mechanics: Statics in SI Units, 1e orce Vectors Bölüm Hedefleri Parallelkenar kuralı Kartezyen vektörler Skaler çarpım ve iki vektör arasındaki açı Bölüm Özeti 1. Skalerler ve vektörler. Vectörel