Engineering Mechanics: Statics in SI Units, 12e. Force Vectors
|
|
|
- Si̇mge Özgen
- 7 yıl önce
- İzleme sayısı:
Transkript

1 Engineering Mechanics: Statics in SI Units, 1e orce Vectors
2 Bölüm Hedefleri Parallelkenar kuralı Kartezyen vektörler Skaler çarpım ve iki vektör arasındaki açı
3 Bölüm Özeti 1. Skalerler ve vektörler. Vectörel işlemler 3. Kuvvetlerin vektörel toplamı 4. Düzlemsel kuvvetlerin toplanması 5. Kartezyen vektörler 6. Kartezyen vektörlerlerde toplama ve çıkarma 7. Konum vektörleri 8. Bir doğru boyunca yönelen kuvvet vektörü 9. Skaler çarpım
4 .1 Skaler ve Vektörler Skaler Pozitif veya negatif bir sayı ile karakterize edilen büyüklüğe denir A skaleri gibi italik harfle gösterilecektir. Örneğin. Kütle,hacim ve uzunluk
5 .1 Skaler ve Vektörler Vektör Bir büyüklük ve doğrultuya sahip bir büyüklüktür. e.g. Konum,kuvvet ve moment Harfin üstüne ok konarak gösterilir. A Büyüklüğü veya sadece A ile gösterilir. A Bu dersde vektörler A olarak ve pozitif olan büyüklük ise A olarak gösterilecek
6 . Vektörel işlemler Vektörün bir skalerle çarpımı ve bölümü - A vektörünün a skaleriyle çarpımı = aa - Büyüklük = aa - Çarpım kuralı geçerlidir e.g. A/a = ( 1/a ) A, a 0
7 . Vektörel işlemler Vektörlerin toplamı - A ve B iki vektörün toplanması paralelkenar kuralına göre R bileşke vektörünü verir. - R bileşke vektörü üçgen oluşturularak da elde edilebilir - Değişme özelliği e.g. R = A + B = B + A - özel durum: A ve B vektörü aynı doğru üzerinde ise R=A+B cebirsel toplamına indirgenir
8 . Vektörel işlemler Vektörlerin farkı - toplamın özel bir durumudur. e.g. R = A B = A + ( - B ) - vektör toplama kuralı uygulanır
9 .3 Kuvvetlerin Vektörel Toplamı Bileşke kuvvetin bulunması Parallelkenar kuralı kullanılarak bulunur Resultant, R = ( 1 + )
10 .3 Kuvvetlerin Vektörel Toplamı Analizde incelenecek yol Parallelkenar kuralı Paralelkenar kuralı kullanılarak vektör toplamını gösteren bir şekil çiziniz Kuvvetlerin iki bileşenini bileşke kuvveti oluşturmak için ekleyiniz Bileşke kuvvet paralelkenarın diyagonelinde göster


11 .3 Kuvvetlerin Vektörel Toplamı Analizde incelenecek yol Trigonometri Parelelkenarın yarısını çiziniz Bileşke kuvvetin büyüklüğü cosinüs kuralı kullanılarak bulunabilir. Bileşke kuvvetin yönü sinüs kuralı kullanılarak bulunabilir İki bileşenin büyüklüğü sinüs kuralı kullanılarak bulunabilir

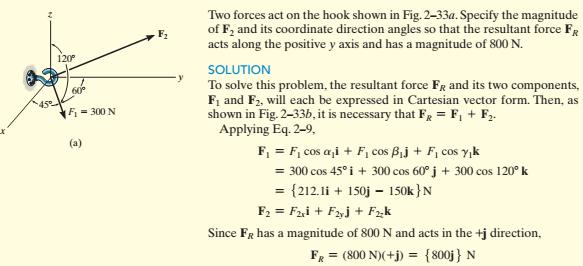
12 Örnek.1 Kanca, 1 ve kuvvetlerine maruzdur.bileşke kuvvetin büyüklük ve doğrultusunu belirleyiniz.

13 Çözüm Parallelkenar kuralı Bilinmeyen: R nin büyüklüğü ve θ açısı
14 Çözüm Trigonometri Cosinüs kuralı 100N 150N 100N 150N cos N N R Sinüs kuralı 150N 1.6N sin sin N sin N 39.8
15 Çözüm Trigonometri Direction Φ of R measured from the horizontal
16 .4 Düzlemsel Kuvvetlerin Toplanması Skalar Gösterim x ve y eksenleri pozitif ve negatif olarak belirtilir Kuvvetin bileşenleri cebirsel skalerle ifade edilir x x y cos and sin y
17 .4 Düzlemsel Kuvvetlerin Toplanması Kartezyen Vektör Gösterimi Kartezyen birim vektörler i ve j x ve y yönlerini göstermek için kullanılır. Birim vektörler i ve j boyutsuz birim değere sahiptir ( = 1 ) Skaler x ve y ile gösterilen büyüklük daima pozitiftir. i x y j
18 .4 Düzlemsel Kuvvetlerin Toplanması Düzlemsel kuvvetlerin bileşkeleri Çok sayıda düzlemsel kuvvetin bileşkesini belirlemek için kullanılır. : Kuvvet x ve y bileşenlerine ayrılır. Karşılıklı bileşenler skaler cebir kullanılarak toplanır. Bileşke kuvvet paralelkenar kuralı kullanlarak bulunur. Kartezyen vektör gösterimi 1 3 1x 3x i x 1y i i 3 y j y j j
19 .4 Düzlemsel Kuvvetlerin Toplanması Düzlemsel kuvvetlerin bileşkeleri Bileşke kuvvet Skaler gösterim kullanılırsa j i Ry Rx R 3 1 y y y Ry x x x Rx
20 .4 Düzlemsel Kuvvetlerin Toplanması Düzlemsel kuvvetlerin bileşkeleri Bütün durumlarda Rx Ry x y * İşaretlere dikkat R nin büyüklüğü Pisagor teoreminden bulunur. R Rx Ry ve tan -1 Ry Rx

21 örnek.5 1 ve nin x ve y bileşenlerini Belirleyiniz.Herbir kuvveti kartezyen vektör şeklinde gösteriniz.

22 Çözüm Skaler gösterim 1x 1y 00sin 30 00cos 30 N 100N 100N N 173N 173N Hence, from the slope triangle, we have tan 1 5 1

23 Çözüm Benzer üçgenden x y Skaler gösterim: 40N 100N x y 100N Kartezyen vektör gösterimi: 40N 1 100N 100i 173 j 40i 100 jn N
24 Çözüm Skaler gösterim 1x 1y 00sin 30 00cos 30 N 100N 100N N 173N 173N Hence, from the slope triangle, we have: 5 tan 1 1 Cartesian Vector Notation 1 100i 173 j 40i 100 jn N
25 Örnek.6 Kanca 1 ve kuvvetlerine maruzdur.bileşke kuvvetin büyüklüğünü ve yönünü bulunuz.

26 Çözüm I Skaler Gösterim: Rx Rx 36.8N Ry Ry x y : 600cos 30 : 600sin N N 400sin 45 N 400cos 45 N N

27 Çözüm I Bileşke kuvvet R 69N θ açısı N 58.8N 58.8 tan 1 N 36.8N
28 Çözüm II Kartezyen vektör notasyonu 1 = { 600cos30 i + 600sin30 j } N = { -400sin45 i + 400cos45 j } N Böylece, R = 1 + = (600cos30ºN - 400sin45ºN)i + (600sin30ºN + 400cos45ºN)j = {36.8i j}N R büyüklüğü ve yönü önceki şekilde bulunur.

29 .5 Kartezyen vektörler Sağ-el koordinat sistemi Bir diktörtgen veya kartezyen koordinat sistemine sağ-el koordinat sistemi denir. : Sağ elin başparmağı pozitif z eksenini gösteriyorsa z-ekseni boyutlu problem için kağıda dik ve dışarı doğru yönelecektir.
30 .5 Kartezyen vektörler Bir vektörün dik bileşenleri Bir A vektörünün x y ve z koordinat eksenlerine göre yönelimine bağlı olarak,bu eksenler üzerinde bir,iki veya üç dik bileşeni olabilir. Paralel kenar kuralını iki kez ard arda uygulayarak A = A + A z A = A x + A y Bu denklemler birleştirilerek, A A = A x + A y + A z olarak ifade edilir.
31 .5 Kartezyen vektörler Birim vektör A nın yönü birim vektör kullanılarak tanımlanabilir Birim vektörün büyüklüğü 1 dir. Eğer A büyüklüğü A 0 olan vektörse, A ile aynı yönlü birim vektör u A = A / A. A = A u A
32 .5 Kartezyen vektörler Kartezyen vektör gösterimi A nın üç bileşeni i, j ve k nın pozitif yönünde etkimektedir, A = A x i + A y j + A Z k *herbir bileşen vektörün büyüklüğü ve doğrultusu ayrılır ve bu vektör cebri işlemlerini basitleştirir
33 .5 Kartezyen vektörler Kartezyen vektörün büyüklüğü Renkli üçgenden, Gölgelim üçgenden, Denklemleri birleştirerek A nın büyüklüğünü verir z y x A A A A ' y x A A A ' z A A A
34 .5 Kartezyen vektörler Kartezyen vektörün doğrultusu A vektörünün yönü başlangıç noktası ve bu noktada yer alan pozitif x, y ve z eksenleri arasında ölçülen α, β ved γ koordinat doğrultu açıları ile tanımlanır. es 0 α, β ve γ 180 A nın doğrultu kosinüsleri cos A x A cos A z A cos A y A
35 .5 Kartezyen vektörler
36 .5 Kartezyen vektörler Kartezyen vektörün doğrultusu α, β ve γ açıları ters kosinüs fonksiyonlarından belirlenebilir. A = A x i + A y j + A Z k Birim vektör, u A = A /A = (A x /A)i + (A y /A)j + (A Z /A)k burada A A A A x y z
37 .5 Kartezyen vektörler Kartezyen vektörün doğrultusu u A şu şekildede ifade edilebilir. u A = cosαi + cosβj + cosγk A A A A olduğundan ve u A = 1, o zaman x y cos z cos cos 1 A kartezyen vektör formunda ifade edilebilir. A = Au A = Acosαi + Acosβj + Acosγk = A x i + A y j + A Z k
38 .6 Kartezyen vektörlerde toplama ve çıkarma Aynı noktadan geçen kuvvet sistemleri Bileşke kuvvet sisteme etki eden bütün kuvvetlerin toplamına eşittir. R = = x i + y j + z k

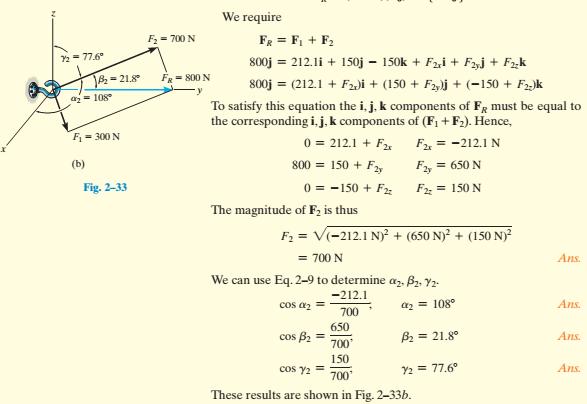
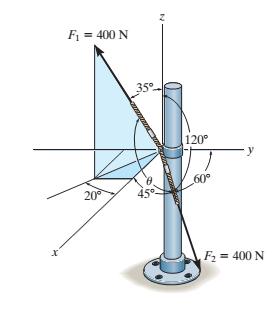
39 örnek.8 kuvvetini kartezyen vektör formunda yazınız.
40 Çözüm İki açı bilindiğinden,üçüncü açı cos cos cos İki ihtimal var cos 1 cos cos 1 cos cos cos ± 0. 5
41 Çözüm α = 60º olduğu görülür çünkü x +x yönündedir. = 00N verilmiş = cosαi + cosβj + cosγk Control edilirse = (00cos60ºN)i + (00cos60ºN)j + (00cos45ºN)k = {100.0i j k}N x y z N
42 Örnek
43 örnek 3
44
45 .7 Konum vektörleri x,y,z koordinatları Sağ-el koordinat sistemi Pozitif z ekseninin,bir nesnenin uzunluğunu veya bir noktanın yüksekliğini ölçecek şekilde,yukarı doğru yönelmesi şeklinde uylaşım kullanacağız. Noktalar O orijinine göre belirlenir.
46 .7 Konum vektörleri Konum vektörü r konum vektörü,bir noktanın uzaydaki konumunu diğer bir noktaya göre belirleyen bir vektördür. E.g. r = xi + yj + zk
47 .7 Konum vektörleri Konum vektörü Vectörlerin uc uca eklenmesi ile r A + r = r B Çözersek r = r B r A = (x B x A )i + (y B y A )j + (z B z A )k or r = (x B x A )i + (y B y A )j + (z B z A )k

48 .7 Konum vektörleri AB kablosunun yönü ve boyu A ve B nin x, y, z eksenleri kullanılarak ölçülür ve bulunur. r konum vektörü kurulabilir. r büyüklüğü kablonun boyunu verir. α, β ve γ açıları kablonun yönünü gösterir. Birim vektör, u = r/r

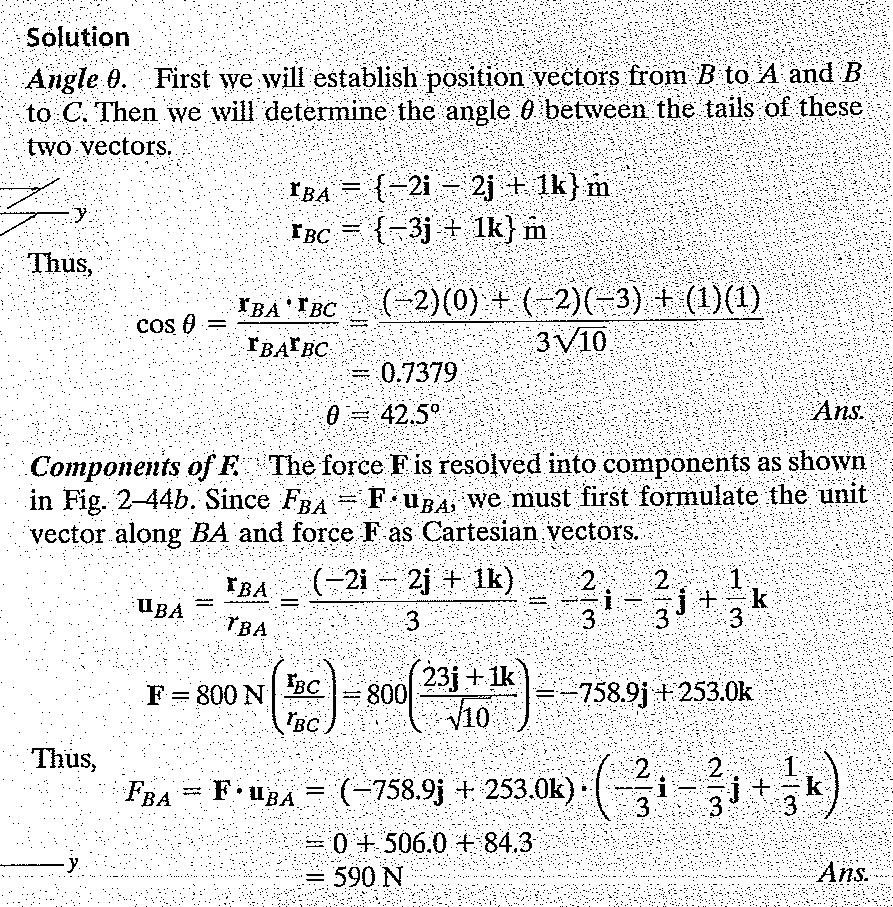
49 Örnek.1 A ve B noktalarına elastik bir bant tutturulmuştur. Bantın uzunluğunu ve A dan B ye ölçülen doğrultusunu belirleyiniz.
![Çözüm Konum vektörü r = [-m 1m]i + [m 0]j + [3m (-3m)]k = {-3i + j + 6k}m Büyüklük =](/docs-images/97/130686038/images/50-0.jpg "elastik bantın uzunluğu 3 6 m r 7 r doğrultusundaki birim vektör u = r /r = -3/7i + /7j +")
50 Çözüm Konum vektörü r = [-m 1m]i + [m 0]j + [3m (-3m)]k = {-3i + j + 6k}m Büyüklük = elastik bantın uzunluğu 3 6 m r 7 r doğrultusundaki birim vektör u = r /r = -3/7i + /7j + 6/7k
 = 73.4 γ = cos -1 (6/7) = 31.")
51 Çözüm α = cos -1 (-3/7) = 115 β = cos -1 (/7) = 73.4 γ = cos -1 (6/7) = 31.0
52 .8 Bir doğru boyunca yönelen kuvvet vektörü 3 boyutlu problemlerde, kuvvetinin doğrultusu etki çizgisinin geçtiği iki nokta ile belirlenir. Kartezyen vektör olarak formüle edebiliriz. = u = (r/r) kuvvet birimi (N) ancak, uzunluk birimidir (m)

53 .8 Bir doğru boyunca yönelen kuvvet vektörü Zincir boyunca hareket eden kuvveti Kartezyen vektörle gösterilebilir. - x, y, z eksenleri kurarak - Zincir boyunca r konum vektörü oluştararak Birim vektör, u = r/r hem kuvvetin hem de zincirin yönünü tanımlar. = u elde ederiz.

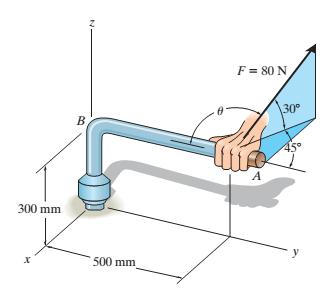
54 Örnek.13 Adam ipi 350N luk bir kuvvetle çekmektedir.a mesnedine etkiyen bu kuvveti Kartezyen vektör şeklinde ifade ediniz ve doğrultusunu belirleyiniz
55 Çözüm İpin uç noktalarının koordinatları A (0m, 0m, 7.5m) ve B (3m, -m, 1.5m) r = (3m 0m)i + (-m 0m)j + (1.5m 7.5m)k = {3i j 6k}m Büyüklük = AB ipinin uzunluğu 3m m 6m m r 7 Birim vektör, u = r /r = 3/7i - /7j - 6/7k
 = {150i - 100j - 300k} N α = cos -1 (3/7) = 64.")
56 Çözüm in büyüklüğü 350N ve doğrultusu u ile tanımlandığından. = u = 350N(3/7i - /7j - 6/7k) = {150i - 100j - 300k} N α = cos -1 (3/7) = 64.6 β = cos -1 (-/7) = 107 γ = cos -1 (-6/7) = 149
57 .9 Skaler çarpım A ve B vektörlerinin skaler çarpımı A B şeklinde yazılır ve (A skaler çarpım B diye okunur.) A ve B nin büyüklükleri ile iki vektör arasındaki açının kosinüsünün çarpımı olarak tanımlanır. A B = AB cosθ where 0 θ 180 Bu çarpım adını sonucun bir skaler olmasından alır.
58 .9 Skaler çarpım İşlem kuralları 1. Değişme özelliği A B = B A. Skaler ile çarpım a(a B) = (aa) B = A (ab) = (A B)a 3. Dağılma kuralı A (B + D) = (A B) + (A D)
59 .9 Skaler çarpım Kartesian Vektör ormulasyonu - birim vektörlerin skaler çarpımı i i = (1)(1)cos0 = 1 i j = (1)(1)cos90 = 0 - benzer şekilde i i = 1 j j = 1 k k = 1 i j = 0 i k = 0 j k = 0
60 .9 Skaler çarpım Kartesian Vektör ormulasyonu A ve B iki vektörün skaler çarpımı A B = A x B x + A y B y + A z B z uygulamalar İki vektör veya kesişen doğrular arasındaki açı θ = cos -1 [(A B)/(AB)] 0 θ 180 Bir vektörün bir doğruya parelel ve dik bileşenleri A a = A cos θ = A u

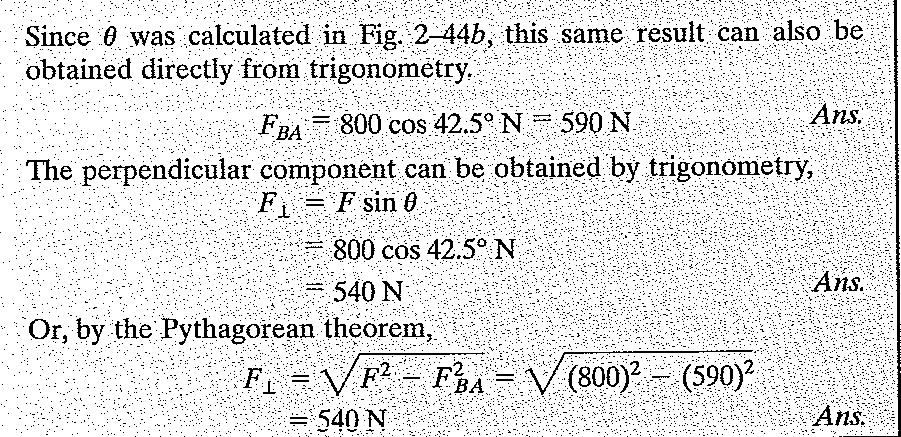
61 Örnek.17 Çerçeveye = {300j} N yatay kuvveti etkimektedir.bu kuvvetin AB elemanına paralel ve dik bileşenlerini belirleyiniz..
62 çözüm Since r i j k u B 6 3 B rb 0.86i j 0.49k Thus AB. u B 57.1N 6 3 cos 300 j 0.86i j 0.49k (0)(0.86) (300)(0.857) (0)(0.49)
63 çözüm Sonuç pozitif bir skaler olduğundan, AB nin yönü u B ile aynıdır. kartesyen formda 57.1N 0.86i j 0.49k {73.5i Dik bileşen AB AB u 0 j 110k} N AB AB 300 j (73.5i 0 j 110k ) { 73.5i 80 j 110k} N
64 çözüm büyüklüğü Pisagor teoreminden veya bu vektörden belirlenebilir. 300N 57.1N 155N AB

65 örnek
66 çözüm
67 çözüm
68
69
70
71
72 QUIZ 1. Which one of the following is a scalar quantity? A) orce B) Position C) Mass D) Velocity. or vector addition, you have to use law. A) Newton s Second B) the arithmetic C) Pascal s D) the parallelogram
73 QUIZ 3. Can you resolve a -D vector along two directions, which are not at 90 to each other? A) Yes, but not uniquely. B) No. C) Yes, uniquely. 4. Can you resolve a -D vector along three directions (say at 0, 60, and 10 )? A) Yes, but not uniquely. B) No. C) Yes, uniquely.
74 QUIZ 5. Resolve along x and y axes and write it in vector form. = { } N y A) 80 cos (30 ) i 80 sin (30 ) j B) 80 sin (30 ) i + 80 cos (30 ) j C) 80 sin (30 ) i 80 cos (30 ) j D) 80 cos (30 ) i + 80 sin (30 ) j 6. Determine the magnitude of the resultant ( 1 + ) force in N when 1 ={ 10i + 0j }N and ={ 0i + 0j } N. A) 30 N B) 40 N C) 50 N D) 60 N E) 70 N 30 x = 80 N
75 QUIZ 7. Vector algebra, as we are going to use it, is based on a coordinate system. A) Euclidean B) Left-handed C) Greek D) Right-handed E) Egyptian 8. The symbols,, and designate the of a 3-D Cartesian vector. A) Unit vectors B) Coordinate direction angles C) Greek societies D) X, Y and Z components
76 QUIZ 9. What is not true about an unit vector, ua? A) It is dimensionless. B) Its magnitude is one. C) It always points in the direction of positive X- axis. D) It always points in the direction of vector A. 10. If = {10 i + 10 j + 10 k} N and G = {0 i + 0 j + 0 k } N, then + G = { } N A) 10 i + 10 j + 10 k B) 30 i + 0 j + 30 k C) 10 i 10 j 10 k D) 30 i + 30 j + 30 k
77 QUIZ 11. A position vector, r PQ, is obtained by A) Coordinates of Q minus coordinates of P B) Coordinates of P minus coordinates of Q C) Coordinates of Q minus coordinates of the origin D) Coordinates of the origin minus coordinates of P 1. A force of magnitude, directed along a unit vector U, is given by =. A) (U) B) U / C) / U D) + U E) U
78 QUIZ 13. P and Q are two points in a 3-D space. How are the position vectors r PQ and r QP related? A) r PQ = r QP B) r PQ = - r QP C) r PQ = 1/r QP D) r PQ = r QP 14. If and r are force vector and position vectors, respectively, in SI units, what are the units of the expression (r * ( / ))? A) Newton B) Dimensionless C) Meter D) Newton - Meter E) The expression is algebraically illegal.
79 QUIZ 15. Two points in 3 D space have coordinates of P (1,, 3) and Q (4, 5, 6) meters. The position vector r QP is given by A) {3 i + 3 j + 3 k} m B) { 3 i 3 j 3 k} m C) {5 i + 7 j + 9 k} m D) { 3 i + 3 j + 3 k} m E) {4 i + 5 j + 6 k} m 16. orce vector,, directed along a line PQ is given by A) (/ ) r PQ B) r PQ /r PQ C) (r PQ /r PQ ) D) (r PQ /r PQ )
80 QUIZ 17. The dot product of two vectors P and Q is defined as A) P Q cos B) P Q sin C) P Q tan D) P Q sec 18. The dot product of two vectors results in a quantity. A) Scalar B) Vector C) Complex D) Zero P Q
81 QUIZ 19. If a dot product of two non-zero vectors is 0, then the two vectors must be to each other. A) Parallel (pointing in the same direction) B) Parallel (pointing in the opposite direction) C) Perpendicular D) Cannot be determined. 0. If a dot product of two non-zero vectors equals -1, then the vectors must be to each other. A) Parallel (pointing in the same direction) B) Parallel (pointing in the opposite direction) C) Perpendicular D) Cannot be determined.
82 QUIZ 1. The dot product can be used to find all of the following except. A) sum of two vectors B) angle between two vectors C) component of a vector parallel to another line D) component of a vector perpendicular to another line. ind the dot product of the two vectors P and Q. P = {5 i + j + 3 k} m Q = {- i + 5 j + 4 k} m A) -1 m B) 1 m C) 1 m D) -1 m E) 10 m
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Ödev 1. Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N
 Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Engineering Mechanics: Statics in SI Units, 12e. Equilibrium of a Particle
 Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle Bölüm Hedefleri Parçacık serbest cisim diyagramı Denge denklemleri kullanılarak parçacık denge problemleri çözümü Bölüm Özeti
Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle Bölüm Hedefleri Parçacık serbest cisim diyagramı Denge denklemleri kullanılarak parçacık denge problemleri çözümü Bölüm Özeti
STATİK. Ders_2. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 STATİK Ders_2 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ KUVVET VEKTÖRLERİ, VEKTÖR İŞLEMLERİ VE AYNI DÜZLEMDEKİ KUVVETLERİN
STATİK Ders_2 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ KUVVET VEKTÖRLERİ, VEKTÖR İŞLEMLERİ VE AYNI DÜZLEMDEKİ KUVVETLERİN
Bölüm 2: Kuvvet Vektörleri. Mühendislik Mekaniği: Statik
 Bölüm 2: Kuvvet Vektörleri Mühendislik Mekaniği: Statik Hedefler Kuvvetleri toplama, bileşenlerini ve bileşke kuvvetlerini Paralelogram Kuralı kullanarak belirleme. Diktörtgen (Cartesian) koordinat sistemi
Bölüm 2: Kuvvet Vektörleri Mühendislik Mekaniği: Statik Hedefler Kuvvetleri toplama, bileşenlerini ve bileşke kuvvetlerini Paralelogram Kuralı kullanarak belirleme. Diktörtgen (Cartesian) koordinat sistemi
VEKTÖRLER KT YRD.DOÇ.DR. KAMİLE TOSUN FELEKOĞLU
 VEKTÖRLER KT YRD.DOÇ.DR. KMİLE TOSUN ELEKOĞLU 1 Mekanik olaları ölçmekte a da değerlendirmekte kullanılan matematiksel büüklükler: Skaler büüklük: sadece bir saısal değeri tanımlamakta kullanılır, pozitif
VEKTÖRLER KT YRD.DOÇ.DR. KMİLE TOSUN ELEKOĞLU 1 Mekanik olaları ölçmekte a da değerlendirmekte kullanılan matematiksel büüklükler: Skaler büüklük: sadece bir saısal değeri tanımlamakta kullanılır, pozitif
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
2. KUVVET SİSTEMLERİ 2.1 Giriş
 2. KUVVET SİSTEMLERİ 2.1 Giriş Kuvvet: Şiddet (P), doğrultu (θ) ve uygulama noktası (A) ile karakterize edilen ve bir cismin diğerine uyguladığı itme veya çekme olarak tanımlanabilir. Bu parametrelerden
2. KUVVET SİSTEMLERİ 2.1 Giriş Kuvvet: Şiddet (P), doğrultu (θ) ve uygulama noktası (A) ile karakterize edilen ve bir cismin diğerine uyguladığı itme veya çekme olarak tanımlanabilir. Bu parametrelerden
TEMEL MEKANİK 5. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 4. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
Doç.Dr. Cesim ATAŞ MEKANİK ŞEKİL DEĞİŞTİREN CİSİMLER MEKANİĞİ DİNAMİK
 STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
BİLGİ TAMAMLAMA VEKTÖRLER
 DİNAMİK BİLGİ TAMAMLAMA VEKTÖRLER Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü VEKTÖRLER Kapsam Büyüklük yanında ayrıca yön
DİNAMİK BİLGİ TAMAMLAMA VEKTÖRLER Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü VEKTÖRLER Kapsam Büyüklük yanında ayrıca yön
1. HAFTA. Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler.
 1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
3 VEKTÖRLER. Pilot uçağın kokpit inden havaalanını nasıl bulur?
 3.1 Koordinat sistemleri 3.2 Kartezyen koordinatlar 3.3 Vektörler 3.4 Vektörlerin bileşenleri 3.5 Vektörlerin toplanması 3.6 Vektörlerin çıkarılması 37Bii 3.7 Birim vektör 3 VEKTÖRLER Pilot uçağın kokpit
3.1 Koordinat sistemleri 3.2 Kartezyen koordinatlar 3.3 Vektörler 3.4 Vektörlerin bileşenleri 3.5 Vektörlerin toplanması 3.6 Vektörlerin çıkarılması 37Bii 3.7 Birim vektör 3 VEKTÖRLER Pilot uçağın kokpit
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Aşağıdaki Web sitesinden dersle ilgili bilgi alınabilir. Ders, uygulama ve ödevlerle ilgili bilgiler yeri geldiğinde yayınlanacaktır.
 MK 04: MUKVEMET Öğr.Gör.Dr. hmet Taşkesen MUKVEMET GİRİŞ DERS STLERİ Öğr.Gör.Dr. hmet Taşkesen, Makina Bölümü, Tel: 1680/1844, e-posta: [email protected] Teorik Ders (3 saat) + Ödevler + Quizler Uygulama
MK 04: MUKVEMET Öğr.Gör.Dr. hmet Taşkesen MUKVEMET GİRİŞ DERS STLERİ Öğr.Gör.Dr. hmet Taşkesen, Makina Bölümü, Tel: 1680/1844, e-posta: [email protected] Teorik Ders (3 saat) + Ödevler + Quizler Uygulama
KÜTLE VE AĞIRLIK MERKEZİ
 VEKTÖRLER KUVVET KAVRAMI MOMENT KÜTLE VE AĞIRLIK MERKEZİ BASİT MAKİNELER -1- VEKTÖRLER -2- Fizik te büyüklükleri ifade ederken sadece sayı ile ifade etmek yetmeye bilir örneğin aşağıdaki büyüklükleri ifade
VEKTÖRLER KUVVET KAVRAMI MOMENT KÜTLE VE AĞIRLIK MERKEZİ BASİT MAKİNELER -1- VEKTÖRLER -2- Fizik te büyüklükleri ifade ederken sadece sayı ile ifade etmek yetmeye bilir örneğin aşağıdaki büyüklükleri ifade
3.1 Vektör Tipleri 3.2 Vektörlerin Toplanması. 3.4 Poligon Kuralı 3.5 Bir Vektörün Skaler ile Çarpımı RİJİT CİSİMLER MEKANİĞİ
 1-STATİĞİN TEMEL İLKELERİ 1- BİRİMLER 2-TRİGONOMETRİ 3-VEKTÖRLER 3.1 Vektör Tipleri 3.2 Vektörlerin Toplanması 3.3 Vektörlerin uç-uca eklenerek toplanması 3.4 Poligon Kuralı 3.5 Bir Vektörün Skaler ile
1-STATİĞİN TEMEL İLKELERİ 1- BİRİMLER 2-TRİGONOMETRİ 3-VEKTÖRLER 3.1 Vektör Tipleri 3.2 Vektörlerin Toplanması 3.3 Vektörlerin uç-uca eklenerek toplanması 3.4 Poligon Kuralı 3.5 Bir Vektörün Skaler ile
3-1 Koordinat Sistemleri Bir cismin konumunu tanımlamak için bir yönteme gereksinim duyarız. Bu konum tanımlaması koordinat kullanımı ile sağlanır.
 Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
KUVVETLER VEKTÖRDÜR BU YÜZDEN CEBİRSEL VEKTÖR TEKNİKLERİ KULLANMALIYIZ
 Rijit Cisim Dengesi KUVVETLER VEKTÖRDÜR BU YÜZDEN CEBİRSEL VEKTÖR TEKNİKLERİ KULLANMALIYIZ KUVVET SİSTEMİ 2 B KUVVET SİSTEMLERİ Detaylar 1- KO-LİNEER 2- BİR NOKTADA BULUŞAN (KONKÜRENT) 3- PARALEL 4- GENEL
Rijit Cisim Dengesi KUVVETLER VEKTÖRDÜR BU YÜZDEN CEBİRSEL VEKTÖR TEKNİKLERİ KULLANMALIYIZ KUVVET SİSTEMİ 2 B KUVVET SİSTEMLERİ Detaylar 1- KO-LİNEER 2- BİR NOKTADA BULUŞAN (KONKÜRENT) 3- PARALEL 4- GENEL
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi [email protected]
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi [email protected]
ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ
 1 ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ Fazör: Zamanla değişen gerilim ve akımın gösterildiği vektörlerdir. Vektör büyüklüğü maksimum değere eşit alınmayıp en çok kullanılan etkin değere eşit alınır.
1 ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ Fazör: Zamanla değişen gerilim ve akımın gösterildiği vektörlerdir. Vektör büyüklüğü maksimum değere eşit alınmayıp en çok kullanılan etkin değere eşit alınır.
STATİĞİN TEMEL PRENSİPLERİ
 1.1. Temel Kavramlar ve Tanımlar Mühendislik mekaniği: Kuvvet etkisi altındaki cisimlerin denge veya hareket koşullarını inceleyen bilim dalı Genel olarak mühendislik mekaniği Sert (rijit) katı cisimlerin
1.1. Temel Kavramlar ve Tanımlar Mühendislik mekaniği: Kuvvet etkisi altındaki cisimlerin denge veya hareket koşullarını inceleyen bilim dalı Genel olarak mühendislik mekaniği Sert (rijit) katı cisimlerin
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
PROF.DR. MURAT DEMİR AYDIN. ***Bu ders notları bir sonraki slaytta verilen kaynak kitaplardan alıntılar yapılarak hazırlanmıştır.
 PO.D. MUAT DEMİ AYDIN ***Bu ders notları bir sonraki slatta verilen kanak kitaplardan alıntılar apılarak hazırlanmıştır. Mühendisler için Vektör Mekaniği: STATİK.P. Beer, E.. Johnston Çeviri Editörü: Ömer
PO.D. MUAT DEMİ AYDIN ***Bu ders notları bir sonraki slatta verilen kanak kitaplardan alıntılar apılarak hazırlanmıştır. Mühendisler için Vektör Mekaniği: STATİK.P. Beer, E.. Johnston Çeviri Editörü: Ömer
13. ÜNİTE KUVVET VE VEKTÖRLER
 13. ÜNİTE KUVVET VE VEKTÖRLER KONULAR 1. VEKTÖR 2. Skaler Büyüklükler 3. Vektörel Büyüklükler 4. Vektörün Yönü 5. Vektörün Doğrultusu 6. Bir Vektörün Negatifi 7. Vektörlerin Toplanması 8. Uç Uca Ekleme
13. ÜNİTE KUVVET VE VEKTÖRLER KONULAR 1. VEKTÖR 2. Skaler Büyüklükler 3. Vektörel Büyüklükler 4. Vektörün Yönü 5. Vektörün Doğrultusu 6. Bir Vektörün Negatifi 7. Vektörlerin Toplanması 8. Uç Uca Ekleme
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
Vektörler. Skaler büyüklükler. Vektörlerin 2 ve 3 boyutta gösterimi. Vektörel büyüklükler. 1. Şekil I de A vektörü gösterilmiştir.
 1 Vektörler Skaler büüklükler 1. de A vektörü gösterilmiştir. Özellikler: Sadece büüklüğü (şiddeti) vardır. Negatif olabilir. Skaler fiziksel büüklüklerin birimi vardır. Örnekler: Zaman Kütle Hacim Özkütle
1 Vektörler Skaler büüklükler 1. de A vektörü gösterilmiştir. Özellikler: Sadece büüklüğü (şiddeti) vardır. Negatif olabilir. Skaler fiziksel büüklüklerin birimi vardır. Örnekler: Zaman Kütle Hacim Özkütle
TEMEL MEKANİK 6. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ
 1 ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ Fazör: Zamanla değişen gerilim ve akımın gösterildiği vektörlerdir. Vektör büyüklüğü maksimum değere eşit alınmayıp
1 ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ ALTERNATİF AKIMIN VEKTÖRLERLE GÖSTERİLMESİ Fazör: Zamanla değişen gerilim ve akımın gösterildiği vektörlerdir. Vektör büyüklüğü maksimum değere eşit alınmayıp
VEKTÖRLER. 1. Skaler Büyüklükler
 VEKTÖRLER Fizikte bazı büyüklükler sayılarla ifade edilebildiği halde, bazılarının ifade edilebilmesinde sayılar yeterli olmamaktadır. Sayılarla birlikte yönün de belirtilmesi gerekir. Bu nedenle fizikte
VEKTÖRLER Fizikte bazı büyüklükler sayılarla ifade edilebildiği halde, bazılarının ifade edilebilmesinde sayılar yeterli olmamaktadır. Sayılarla birlikte yönün de belirtilmesi gerekir. Bu nedenle fizikte
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çöümleri DĞHN MÜHENDİSLİK MEKNİĞİ STTİK MÜHENDİSLİK MEKNİĞİ STTİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve Vektörler - Newton Kanunları 2. KUVVET SİSTEMLEİ - İki Boutlu Kuvvet
Statik Ders Notları Sınav Soru ve Çöümleri DĞHN MÜHENDİSLİK MEKNİĞİ STTİK MÜHENDİSLİK MEKNİĞİ STTİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve Vektörler - Newton Kanunları 2. KUVVET SİSTEMLEİ - İki Boutlu Kuvvet
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
STATICS. Equivalent Systems of Forces VECTOR MECHANICS FOR ENGINEERS: Seventh Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Seventh E 3 Rigid CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Seventh
Seventh E 3 Rigid CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Seventh
TEKNOLOJİNİN BİLİMSEL İLKELERİ. Öğr. Gör. Adem ÇALIŞKAN
 TEKNOLOJİNİN BİLİMSEL İLKELERİ 4 Skaler: Fiziki büyüklükler SKALER BÜYÜKLÜK SEMBOLÜ BİRİMİ Kütle m Kilogram Hacim V m 3 Zaman t Saniye Sıcaklık T Kelvin Sadece sayısal değer ve birim verilerek ifade edilen
TEKNOLOJİNİN BİLİMSEL İLKELERİ 4 Skaler: Fiziki büyüklükler SKALER BÜYÜKLÜK SEMBOLÜ BİRİMİ Kütle m Kilogram Hacim V m 3 Zaman t Saniye Sıcaklık T Kelvin Sadece sayısal değer ve birim verilerek ifade edilen
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
TEKNOLOJİNİN BİLİMSEL İLKELERİ
 TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur.
 Üç Boyutlu Geometri Nokta (Point,Vertex) Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur. Kartezyen Koordinat Sistemi Uzayda bir noktayı tanımlamak
Üç Boyutlu Geometri Nokta (Point,Vertex) Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur. Kartezyen Koordinat Sistemi Uzayda bir noktayı tanımlamak
TORK VE DENGE. İçindekiler TORK VE DENGE 01 TORK VE DENGE 02 TORK VE DENGE 03 TORK VE DENGE 04. Torkun Tanımı ve Yönü
 İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50
 YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50 Toplam 100 1 Mukavemet ve Statiğin Önemi 2 Statiğin
YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50 Toplam 100 1 Mukavemet ve Statiğin Önemi 2 Statiğin
3. KUVVET SİSTEMLERİ
 3. KUVVET SİSTEMLERİ F F W P P 3.1 KUVVET KAVRAMI VE ETKİLERİ Kuvvet, bir cisme etki eden yapısal yüklerdir. Kuvvet Şiddeti, yönü ve uygulama noktası olan vektörel bir büyüklüktür. Bir cismin üzerine uygulanan
3. KUVVET SİSTEMLERİ F F W P P 3.1 KUVVET KAVRAMI VE ETKİLERİ Kuvvet, bir cisme etki eden yapısal yüklerdir. Kuvvet Şiddeti, yönü ve uygulama noktası olan vektörel bir büyüklüktür. Bir cismin üzerine uygulanan
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
Maddesel Nokta Statiği 2.1. HAFTA. Đçindekiler S T A T İ K :
 --11-- Maddesel Nkta Statiği 2.1. HATA --22-- Đçindekiler Mekaniğe Giriş Đki kuvvetin bileşkesi Vektörler Vectörel işlemler Bir nktada kesişen kuvvetlerin bileşkesi Örnek Prblem 2.1 Örnek Prblem 2.2 Bir
--11-- Maddesel Nkta Statiği 2.1. HATA --22-- Đçindekiler Mekaniğe Giriş Đki kuvvetin bileşkesi Vektörler Vectörel işlemler Bir nktada kesişen kuvvetlerin bileşkesi Örnek Prblem 2.1 Örnek Prblem 2.2 Bir
Şimdi de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor. teoreminini iki kere kullanarak
![Şimdi de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor. teoreminini iki kere kullanarak](/thumbs/17/146647.jpg "Şimdi de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor. teoreminini iki kere kullanarak") 10.Konu İç çarpım uzayları ve özellikleri 10.1. ve üzerinde uzunluk de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor teoreminden dir. 1.Ö.: [ ] ise ( ) ( ) ve ( ) noktaları gözönüne alalım.
10.Konu İç çarpım uzayları ve özellikleri 10.1. ve üzerinde uzunluk de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor teoreminden dir. 1.Ö.: [ ] ise ( ) ( ) ve ( ) noktaları gözönüne alalım.
1. BÖLÜM VEKTÖRLER 1
 1. BÖLÜM VEKTÖRLER 1 Tanım:Matematik, istatistik, mekanik, gibi çeşitli bilim dallarında znlk, alan, hacim, yoğnlk, kütle, elektriksel yük, gibi büyüklükler, cebirsel krallara göre ifade edilirler. B tür
1. BÖLÜM VEKTÖRLER 1 Tanım:Matematik, istatistik, mekanik, gibi çeşitli bilim dallarında znlk, alan, hacim, yoğnlk, kütle, elektriksel yük, gibi büyüklükler, cebirsel krallara göre ifade edilirler. B tür
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
Bölüm 3 - Parçacık Dengesi. Spring 2002 Equilibrium of a Particle 1
 Bölüm 3 - Parçacık Dengesi Spring 2002 Equilibrium of a Particle 1 3 Boyutta denge 0 Burada parçacık üzerineetkiyen tüm kuvvetlerin toplamıdır. Spring 2002 Equilibrium of a Particle 2 Spring 2002 Equilibrium
Bölüm 3 - Parçacık Dengesi Spring 2002 Equilibrium of a Particle 1 3 Boyutta denge 0 Burada parçacık üzerineetkiyen tüm kuvvetlerin toplamıdır. Spring 2002 Equilibrium of a Particle 2 Spring 2002 Equilibrium
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Rijit cisim mekaniği, diyagramdan da görüldüğü üzere statik ve dinamik olarak ikiye ayrılır. Statik dengede bulunan cisimlerle, dinamik hareketteki
 Rijit cisim mekaniği, diyagramdan da görüldüğü üzere statik ve dinamik olarak ikiye ayrılır. Statik dengede bulunan cisimlerle, dinamik hareketteki cisimlerle uğraşır. Statik, kuvvet etkisi altında cisimlerin
Rijit cisim mekaniği, diyagramdan da görüldüğü üzere statik ve dinamik olarak ikiye ayrılır. Statik dengede bulunan cisimlerle, dinamik hareketteki cisimlerle uğraşır. Statik, kuvvet etkisi altında cisimlerin
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
UZAYDA VEKTÖRLER ve DOĞRU DÜZLEM
 UD VEKTÖRLER ve DĞRU DÜLEM. ir küpün ayrıtlarını taşıyan doğrular kaç farklı doğrultu oluşturur? ) ) ) D) 7 E) 8. ir düzgün altıgenin en uzun köşegeni ile aynı doğrultuda kaç farklı kenar vardır?. şağıdaki
UD VEKTÖRLER ve DĞRU DÜLEM. ir küpün ayrıtlarını taşıyan doğrular kaç farklı doğrultu oluşturur? ) ) ) D) 7 E) 8. ir düzgün altıgenin en uzun köşegeni ile aynı doğrultuda kaç farklı kenar vardır?. şağıdaki
Vektörler Bölüm Soruları 1. İki vektör eşit olmayan büyüklüklere sahiptir. Toplamları sıfır olabilir mi? Açıklayınız.
 Vektörler Bölüm Soruları 1. İki vektör eşit olmayan büyüklüklere sahiptir. Toplamları sıfır olabilir mi? Açıklayınız. 2. Bir parçacığın yerdeğiştirmesinin büyüklüğü, alınan yolun uzunluğundan daha büyük
Vektörler Bölüm Soruları 1. İki vektör eşit olmayan büyüklüklere sahiptir. Toplamları sıfır olabilir mi? Açıklayınız. 2. Bir parçacığın yerdeğiştirmesinin büyüklüğü, alınan yolun uzunluğundan daha büyük
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
DERSİN KODU: EBP103 DERSİN ADI:TEKNOLOJİNİN BİLİMSEL İLKELERİ BÖLÜM: 2 DERS HOCASI: PROF.DR.HÜSEYİN ÜNVER
 DERSİN KODU: EBP103 DERSİN ADI:TEKNOLOJİNİN BİLİMSEL İLKELERİ BÖLÜM: 2 DERS HOCASI: PROF.DR.HÜSEYİN ÜNVER 1 Bölüm Hedefi BÖLÜM 2: VEKTÖRLER Günlük hayatımızda kullandığımız fiziksel niceliklerin bazı özelliklerini
DERSİN KODU: EBP103 DERSİN ADI:TEKNOLOJİNİN BİLİMSEL İLKELERİ BÖLÜM: 2 DERS HOCASI: PROF.DR.HÜSEYİN ÜNVER 1 Bölüm Hedefi BÖLÜM 2: VEKTÖRLER Günlük hayatımızda kullandığımız fiziksel niceliklerin bazı özelliklerini
KUTUPSAL KOORDİNATLAR
 KUTUPSAL KOORDİNATLAR Geometride, bir noktanın konumunu belirtmek için değişik yöntemler uygulanır. Örnek olarak çok kullanılan Kartezyen (Dik ) Koordinat sistemini anımsatarak çalışmamıza başlayalım.
KUTUPSAL KOORDİNATLAR Geometride, bir noktanın konumunu belirtmek için değişik yöntemler uygulanır. Örnek olarak çok kullanılan Kartezyen (Dik ) Koordinat sistemini anımsatarak çalışmamıza başlayalım.
TORK VE DENGE 01 Torkun Tanımı ve Yönü
 TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
11. SINIF. No Konular Kazanım Sayısı GEOMETRİ TRİGONOMETRİ Yönlü Açılar Trigonometrik Fonksiyonlar
 11. SINIF No Konular Kazanım Sayısı GEOMETRİ Ders Saati Ağırlık (%) 11.1. TRİGONOMETRİ 7 56 26 11.1.1. Yönlü Açılar 2 10 5 11.1.2. Trigonometrik Fonksiyonlar 5 46 21 11.2. ANALİTİK GEOMETRİ 4 24 11 11.2.1.
11. SINIF No Konular Kazanım Sayısı GEOMETRİ Ders Saati Ağırlık (%) 11.1. TRİGONOMETRİ 7 56 26 11.1.1. Yönlü Açılar 2 10 5 11.1.2. Trigonometrik Fonksiyonlar 5 46 21 11.2. ANALİTİK GEOMETRİ 4 24 11 11.2.1.
Dik koordinat sisteminde yatay eksen x ekseni (apsis ekseni), düşey eksen ise y ekseni (ordinat ekseni) dir.
, düşey eksen ise y ekseni (ordinat ekseni) dir.") ANALĐTĐK GEOMETRĐ 1. Analitik Düzlem Bir düzlemde dik kesişen iki sayı doğrusunun oluşturduğu sisteme analitik düzlem denir. Analitik düzlem, dik koordinat sistemi veya dik koordinat düzlemi olarak da
ANALĐTĐK GEOMETRĐ 1. Analitik Düzlem Bir düzlemde dik kesişen iki sayı doğrusunun oluşturduğu sisteme analitik düzlem denir. Analitik düzlem, dik koordinat sistemi veya dik koordinat düzlemi olarak da
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bu bölümde, bir noktaya etkiyen ve bir koordinat ekseni ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi ile ilişkili gerilme bileşenlerine dönüştürmek
Gerilme Dönüşümleri (Stress Transformation) Bu bölümde, bir noktaya etkiyen ve bir koordinat ekseni ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi ile ilişkili gerilme bileşenlerine dönüştürmek
11. SINIF KONU ANLATIMLI. 1. ÜNİTE: KUVVET VE HAREKET 8. Konu TORK VE DENGE ETKİNLİK VE TEST ÇÖZÜMLERİ
 11. SINI NU ANAIMI 1. ÜNİE: UVVE VE HAREE 8. onu R VE DENGE EİNİ VE ES ÇÖZÜMERİ 8 ork ve Denge 1. Ünite 8. onu (ork ve Denge) A nın Çözümleri 1. Çubuk dengede olduğuna göre noktasına göre toplam tork sıfırdır.
11. SINI NU ANAIMI 1. ÜNİE: UVVE VE HAREE 8. onu R VE DENGE EİNİ VE ES ÇÖZÜMERİ 8 ork ve Denge 1. Ünite 8. onu (ork ve Denge) A nın Çözümleri 1. Çubuk dengede olduğuna göre noktasına göre toplam tork sıfırdır.
MECHANICS OF MATERIALS
 00 The McGraw-Hill Companies, Inc. All rights reserved. T E CHAPTER 7 Gerilme MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Dönüşümleri Fatih Alibeoğlu 00 The McGraw-Hill
00 The McGraw-Hill Companies, Inc. All rights reserved. T E CHAPTER 7 Gerilme MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Dönüşümleri Fatih Alibeoğlu 00 The McGraw-Hill
VECTOR MECHANICS FOR ENGINEERS: STATICS
 Seventh Edition VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Ders Notu: Hayri ACAR İstanbul Teknik Üniveristesi Tel: 85 31 46 / 116 E-mail: [email protected] Web: http://atlas.cc.itu.edu.tr/~acarh
Seventh Edition VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Ders Notu: Hayri ACAR İstanbul Teknik Üniveristesi Tel: 85 31 46 / 116 E-mail: [email protected] Web: http://atlas.cc.itu.edu.tr/~acarh
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Çerçeveler ve Basit Makinalar
 Çerçeveler ve Basit Makinalar Çeşitli elemanların birbirlerine bağlanması ile oluşan sistemlerdir. Kafes sistemlerden farklı olarak, elemanlar birbirlerine 2 den fazla noktadan bağlanabilir ve dış kuvvetler
Çerçeveler ve Basit Makinalar Çeşitli elemanların birbirlerine bağlanması ile oluşan sistemlerdir. Kafes sistemlerden farklı olarak, elemanlar birbirlerine 2 den fazla noktadan bağlanabilir ve dış kuvvetler
FLUID MECHANICS PRESSURE AND MOMENTUM FORCES A-PRESSURE FORCES. Example
 A-PRESSURE FORCES FLUID MECHANICS PRESSURE AND MOMENTUM FORCES Consider a duct as shown in figure. First identify the control volume on which to conduct a force balance. The inner passage is filled with
A-PRESSURE FORCES FLUID MECHANICS PRESSURE AND MOMENTUM FORCES Consider a duct as shown in figure. First identify the control volume on which to conduct a force balance. The inner passage is filled with
KONU 3. STATİK DENGE
 KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
VECTOR MECHANICS FOR ENGINEERS: STATICS
 Seventh Edition VECTOR MECHANICS OR ENGINEERS: STATICS edinand P. Bee E. Russell Johnston, J. Des Notu: Hai ACAR İstanbul Teknik Üniveistesi Tel: 285 31 46 / 116 E-mail: [email protected] Web: http://atlas.cc.itu.edu.t/~acah
Seventh Edition VECTOR MECHANICS OR ENGINEERS: STATICS edinand P. Bee E. Russell Johnston, J. Des Notu: Hai ACAR İstanbul Teknik Üniveistesi Tel: 285 31 46 / 116 E-mail: [email protected] Web: http://atlas.cc.itu.edu.t/~acah
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Denk Kuvvet Sistemleri
 Denk Kuvvet Sistemleri TEK KUVVETİN DENK KUVVET SİSTEMİ Hareket eden bir kuvvetin etkisi. 1. KUVVETİN KENDİ ETKİ ÇİZGİSİ ÜZERİNDE AKTARILMASI. 2. KUVVETİN KENDİ ETKİ ÇİZGİSİ DIŞINA AKTARILMASI. Denk Kuvvet
Denk Kuvvet Sistemleri TEK KUVVETİN DENK KUVVET SİSTEMİ Hareket eden bir kuvvetin etkisi. 1. KUVVETİN KENDİ ETKİ ÇİZGİSİ ÜZERİNDE AKTARILMASI. 2. KUVVETİN KENDİ ETKİ ÇİZGİSİ DIŞINA AKTARILMASI. Denk Kuvvet
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Vektör - Kuvvet. Test 1 in Çözümleri. 4. Uç uca ekleme yöntemiyle K + L + M + N vektörlerini toplayalım. I. grubun oyunu kazanabilmesi için F 1
 7 Vektör - uvvet 1 Test 1 in Çözümleri 1. 4. Uç uca ekleme yöntemiyle + + + vektörlerini toplayalım. I. grubun oyunu kazanabilmesi için kuvvetinin den büyük olması gerekir. A seçeneğinde her iki grubun
7 Vektör - uvvet 1 Test 1 in Çözümleri 1. 4. Uç uca ekleme yöntemiyle + + + vektörlerini toplayalım. I. grubun oyunu kazanabilmesi için kuvvetinin den büyük olması gerekir. A seçeneğinde her iki grubun
Bölümün İçeriği ve Amacı:
 ölümün İçeriği ve macı: Koordinat Sistemleri Vektör ve Skaler Nicelikleri Vektörlerin azı Özellikleri ir Vektörün ileşenleri ve irim Vektörler ölüm 3: Vektörler Vektör kavramının fizikteki önemi ve gerekliliğini
ölümün İçeriği ve macı: Koordinat Sistemleri Vektör ve Skaler Nicelikleri Vektörlerin azı Özellikleri ir Vektörün ileşenleri ve irim Vektörler ölüm 3: Vektörler Vektör kavramının fizikteki önemi ve gerekliliğini
EĞİTİM ÖĞRETİM YILI. ANADOLU LİSESİ 11.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLLIK PLANI 11.SINIF KAZANIM VE SÜRE TABLOSU
 08-09 EĞİTİM ÖĞRETİM YILI. ANADOLU LİSESİ.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLLIK PLANI.SINIF KAZANIM VE SÜRE TABLOSU No Konular Kazanım sayısı Ders Saati Ağırlık (%).. TRİGONOMETRİ 7 6 6.. Yönlü
08-09 EĞİTİM ÖĞRETİM YILI. ANADOLU LİSESİ.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLLIK PLANI.SINIF KAZANIM VE SÜRE TABLOSU No Konular Kazanım sayısı Ders Saati Ağırlık (%).. TRİGONOMETRİ 7 6 6.. Yönlü
VEKTÖRLER SORULAR 1.) 3.) 4.) 2.)
 3.) 4.) 2.)") VETÖRER SORUR 1.) 3.) ynı düzlemde bulunan, ve vektörleri için verilen; I. = II. II = II III. = 2 Şekildeki aynı düzlemli vektörlerle tanımlanmış + + = D işleminin sonucunda elde edilen D vektörünün büyüklüğü
VETÖRER SORUR 1.) 3.) ynı düzlemde bulunan, ve vektörleri için verilen; I. = II. II = II III. = 2 Şekildeki aynı düzlemli vektörlerle tanımlanmış + + = D işleminin sonucunda elde edilen D vektörünün büyüklüğü
Küre Küre Üzerinde Hesap. Ders Sorumlusu Prof. Dr. Mualla YALÇINKAYA 2018
 Küre Küre Üzerinde Hesap Ders Sorumlusu Prof. Dr. Mualla YALÇINKAYA 2018 Küre ve Küre ile İlgili Tanımlar Küre: «Merkez» adı verilen bir noktaya eşit uzaklıktaki noktaların bir araya getirilmesiyle, ya
Küre Küre Üzerinde Hesap Ders Sorumlusu Prof. Dr. Mualla YALÇINKAYA 2018 Küre ve Küre ile İlgili Tanımlar Küre: «Merkez» adı verilen bir noktaya eşit uzaklıktaki noktaların bir araya getirilmesiyle, ya
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
EĞİTİM ÖĞRETİM YILI. FEN LİSESİ 11.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLLIK PLANI 11.SINIF KAZANIM VE SÜRE TABLOSU
 08-09 EĞİTİM ÖĞRETİM YILI. FEN LİSESİ.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLLIK PLANI.SINIF KAZANIM VE SÜRE TABLOSU No Konular Kazanım sayısı Ders Saati Ağırlık (%).. TRİGONOMETRİ 8 6 6.. Yönlü Açılar
08-09 EĞİTİM ÖĞRETİM YILI. FEN LİSESİ.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLLIK PLANI.SINIF KAZANIM VE SÜRE TABLOSU No Konular Kazanım sayısı Ders Saati Ağırlık (%).. TRİGONOMETRİ 8 6 6.. Yönlü Açılar
TEMEL MEKANİK 1. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
MEKANİK NEDİR? Bu Ders Gerçek Hayatta Ne İşe Yarayacak?
 MEKANİK NEDİR? Mekaniğin bir dalı olan statiği daha iyi anlayabilmek için öncelikle mekaniği ve ona bağlı konuları hızlı bir şekilde gözden geçirmekte yarar vardır. Mekanik; kuvvetlerin etkisi altında
MEKANİK NEDİR? Mekaniğin bir dalı olan statiği daha iyi anlayabilmek için öncelikle mekaniği ve ona bağlı konuları hızlı bir şekilde gözden geçirmekte yarar vardır. Mekanik; kuvvetlerin etkisi altında
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLER 1. GİRİŞ - Skalerler ve Vektörler - Newton Kanunları. KUVVET SİSTEMLERİ - İki Boutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLER 1. GİRİŞ - Skalerler ve Vektörler - Newton Kanunları. KUVVET SİSTEMLERİ - İki Boutlu
Mekanik olayları ölçmekte ya da değerlendirmekte kullanılan matematiksel büyüklükler:
 VEKTÖRLER KT 1 Mekanik olaylaı ölçmekte ya da değelendimekte kullanılan matematiksel büyüklükle: Skale büyüklük: sadece bi sayısal değei tanımlamakta kullanılı, pozitif veya negatif olabili. Kütle, hacim
VEKTÖRLER KT 1 Mekanik olaylaı ölçmekte ya da değelendimekte kullanılan matematiksel büyüklükle: Skale büyüklük: sadece bi sayısal değei tanımlamakta kullanılı, pozitif veya negatif olabili. Kütle, hacim
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
3. V, R 3 ün açık bir altkümesi olmak üzere, c R. p noktasında yüzeye dik olduğunu gösteriniz.(10
 Diferenisyel Geometri 2 Yazokulu 2010 AdıSoyadı: No : 1. ϕ (u, v) = ( u + 2v, v + 2u, u 2 v ) parametrizasyonu ile verilen M kümesinin bir regüler yüzey olduğunu gösteriniz. (15 puan) 3. V, R 3 ün açık
Diferenisyel Geometri 2 Yazokulu 2010 AdıSoyadı: No : 1. ϕ (u, v) = ( u + 2v, v + 2u, u 2 v ) parametrizasyonu ile verilen M kümesinin bir regüler yüzey olduğunu gösteriniz. (15 puan) 3. V, R 3 ün açık