MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta)
|
|
|
- Ata Ince
- 7 yıl önce
- İzleme sayısı:
Transkript
1 MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar değişime uğrasa da temel yapılarında fazla bir değişim gözlenmemektedir. Değişim daha çok makinalar üzerine eklenen, kendi kendini kontrol edebileceği otomatik ve akıllı sistemler yönünde olmaktadır. Bu yönüyle de tüm makinalar, mekatronik sistemlere doğru bir geçiş ve gelişim içerisinde bulunmaktadır. Bu ders kapsamında makinaları bir alt bileşenlere ayırdığımızda ortaya çıkan mekanizmaların, hareketli mil ve volan gibi elemanların dinamik hesaplamaları yapılacaktır. Dinamik hesaplar iki kısımda ele alınabilir. Hareketi tanımlayan konum hız ve ivmelerin hesabı (kinematik) ve herketi neden olan kuvvet ve momentlerin hesabı (kinetik). Dinamik sistemler ile statik sistemlerin farkı, hareketli sistemde bulunan ivmeler nedeniyle ortaya çıkan atalet kuvvetleridir. Statik kuvvetlerin üzerine bu kuvvetlerde eklendiği zaman dinamik kuvvetler olmuş olur. Atalet kuvvetlerinin hesabı için ivmelerin bilinmesi gerekir. İvmelerin hesabı içinde konum ve hızdan başlayarak tüm hesapların yapılması gerekir. Günümüzde mühendislik artık analitik hesaplar yerine daha çok sonlu elemanlar yöntemini kullanan paket programlar ile yapılmaktadır. Burada hesaplanan değerler Ansys sonlu elemanlar programının sonuçları ile de karşılaştırılarak çözümlerin doğrulaması yapılacaktır. Ayrıca belli Mekanik Rijit Cisimler Mekaniği Elastik Cisimler Mekaniği Akışkanlar Mekaniği Statik Dinamik Sıkıştırılamaz akışkanlar (sıvılar) (Hidrolik) Sıkıştırılabilir akışkanlar (gazlar) (Pnömatik) Kinematik (Mekanizma Tekniği) Kinetik (Makine Dinamiği Makina Bir enerjiyi alıp başka bir enerjiye dönüştüren, yada almış olduğu enerji ile iş yapabilen sistemlerdir. Bu tanım ile sadece ısıl işlem yada bilgi işlemi yapan makinalar tam olarak makina sayılmazlar. Makina, içerisinde mekanizmaların bulunduğu hareketli sistemlerdir. Makinalar kendi kendine hareketini devam ettirebilen sistemlerdir. Bir makina belli özel bir amaç için üretilmiştir. Örneğin içten yanmalı bir motor makinadır. Yakıttan almış olduğu kimyasal enerjiyi mekanik enerjiye dönüştürmektedir. Elde edilen mekanik enerji taşıtlarda kullanılarak yük ve insan taşınması sağlanır ve bir iş yapılmış olur (iş için kuvvet ve yerdeğişimi olması gerekir). Kaloriferde kullanmak üzere suyu ısıtan bir kazan tam olarak bir makina sayılmaz. Yada kullandığımız bilgisayarlar yine tam olarak bir makina sayılmazlar. Mekanizma Bir hareketi alıp, başka bir harekete dönüştüren, yada hareketi ileten sistemlerdir. Rijit cisimlerin (şekli değişmeyen) ve mafsalların birleştirilmesi ile elde edilir. Kendi kendine hareket edemezler. Bir mekanizma genel bir amaç için üretilmiştir. Aynı mekanizma bir çok makinada farklı görevler için kullanılabilir. Örneğin motordaki bir krank-biyel mekanizması doğrusal hareketi dairesel harekete dönüştüren bir mekanizmadır. Ayrıca subapları hareket ettiren kam mili ve ona bağlı uzuvlar bir mekanizmadır. Kam milindeki dönme hareketi subaplarda doğrusal harekete dönüşmektedir. Ayrıca krank ve kam milini birbirine bağlayan kayış kasnak sistemi (triger kayışı) de bir mekanizmadır. Dönme hareketi kranktan alıp kam miline taşımaktadır (ayrıca ek bir çok sistemi daha çalıştırmaktadır). 1



2 Uzuv Mekanizmayı oluşturan, üzerinde kuvvet ve moment taşıyabilen rijit parçalara uzuv denir. Ayrı ayrı parçalar bir araya gelip sabit bir şekilde bağlanırsa ve kendi aralarında izafi hareketleri yoksa bu parçaların birleşmiş hali tek bir uzuvdur. Örneğin krank biyel mekanizmasındaki silindir, piston, biyel, krank birer uzuvdur. Silindir; içerisinde oluşan basıncı tutar. Piston; üzerindeki basıncı kuvvete dönüştürür. Biyel; aldığı kuvveti diğer ucundan kranka aktarır. Krank ise almış olduğu çevresel kuvveti momente dönüştür. Bir katı cismin üzerinde bulunan Kinematik Elemanların sayısına göre uzuvlar isimlendirilebilir. Kinematik Eleman Uzuvların birbirine göre bağıl hareket yapabilecek şekilde bağlamak için kullanılan uzvun bir kısmına Kinamatik Eleman denir. Kinematik Çift (Mafsal) Mekanizmayı oluşturan uzuvlar, Kinematik Eleman olarak adlandırılan mafsal yada temas noktalarından birbirine bağlanarak Kinematik Çifti oluşturur. Mafsal kelimesi kinematik çift kavramını tam olarak karşılamaz. Kinematik çift içerisinde noktasal, çizgisel ve yüzey temaslarının tamamını bulundurur. Mafsal ise dönel bir şekilde bağlanan yüzey temaslarını içerir. Bir mekanizmayı diğerlerinden ayıran özellik rijit uzuvlardan daha çok kinematik çiftlerdir. Mafsal noktalarındaki hareket serbestlikleri, bu noktalarda cisimlerin birbirlerine göre bağıl hareketleri, her bir mekanizmayı diğerlerinden ayıran özellikleri oluşturur. İki uzuv arasında her temas kinematik çift değildir. İki uzuv arasında sadece 1 tane kinematik çift bulunabilir. Kinematik Çiftler Kapalı Kinematik Çiftler (İki eleman arasındaki temas mekanizmanın tüm hareketi süresince mevcut) Açık Kinematik Çiftler (Kinematik elemanlar hareketin tümü boyunca temas etmeyebilir) 2



3 Mafsal noktasında bağlı olan elemanların sayısına göre isimlendirme yapılır ve buna Mafsal Derecesi denir. Mafsal derecesi= UzuvSayisi -1 olarak hesaplanır. Kapalı Kinematik Çiftler Kuvvet Kapalı Çiftler (Kuvvet ile temas sağlanmaktadır) Şekil Kapalı Çiftler (Şekil ile temas sağlanmaktadır) Temas Durumuna göre Kinematik Çiftler Basit Kinematik Çift (Temas bir yüzey boyunca sağlanmaktadır) Yüksek Kinematik Çift (Temas bir nokta veya çizgi boyuca sağlanmaktadır) 3

4 Kinematik Zincir Birbirine kinematik çiftlerle bağlanmış uzuvlar bir zincir oluşturacaktır. Kapalı kinematik zincir ve Açık kinematik zincir şeklinde iki grupta ele alınabilir. Kinematik zinciri oluşturan tüm uzuvların hareketi aynı düzlemde veya birbirlerine paralel düzlemlerde ise, bu kinematik zincirler "Düzlemsel kinematik zincir" dir. Uzuvların üzerinde bulunan noktaların tümü aynı merkezli küreler üzerinde hareket ediyor ise, "Küresel kinematik zincir" dir. En genel zincir ise "Uzaysal kinematik zincir" dir. Kinematik zincirde bulunan bir uzvun sabitleştirilmesi ile elde edilen sistem mekanizmadır. Bu tanım mekanizma için verilebilecek bir başka tanımdır. Kinematik zincirler oluşturulurken bazı hususlara dikkate dilmelidir. Geometrik Boyut, Kinematik Boyut Mekanizma üzerindeki uzuvların üretimi için gerekli geometrik boyutlar çoğunlukla, kinematik açıdan bir anlam ifade etmeyebilir. Kinematik açıdan gerekli boyutlar hareketi etkileyen ölçülerdir. Bunun için aşağıdaki şekli inceleyin. Düzlemsel Hareket Düzlemsel hareket 3 şekilde ele alınabilir. a) Dönme Hareketi: Cismin üzerindeki tüm noktalar hareket boyunca dairesel yörünge çiziyorsa cisim dönüyor demektir. Krank-biyel mekanizmasında krankın hareketi gibi. b) Öteleme Hareketi: Cismin üzerindeki tüm noktalar hareket boyunca doğru çiziyorsa cisim öteleniyor demektir. Krankbiyel mekanizmasında Pistonun hareketi bu şekildedir. c) Dönme+Öteleme Hareketi: Her iki hareketin beraber olduğu hareketlerdir. Yine krank-biyel mekanizmasında biyelin hareketi bu şekildedir. Düzlemsel Hareket Dönme Hareketi Öteleme Hareketi Dönme+Öteleme Hareketi 4


5 Serbestlik Derecesi Bir cismin uzaydaki yada düzlemdeki konumunu belirlemek için gerekli bağımsız parametre sayısıdır. Aynı şekilde Kinematik çiftlerinde konumlarını belirmek için serbestlik derecesinden bahsedebiliriz. Serbetlik derecesi o sistemin hareketlerini tümüyle kontrol edebilmek için gerekli olan parametre sayısıdır. Farklı bir ifade ile sistemi kontrol etmek için gerekli olan motor sayısını da verir. Üç serbestlik dereceli bir sistemin tüm hareketlerini kontrol edebilmek için en az üç tane motor gerekir. Uzayda bir cismin serbestlik derecesi 6 dır. Düzlemde ise 3 tür. a) Uzayda Bir Cismin Serbestlik Derecesi Cismin uzayda konumunu belirlemek için en az üç tane noktasını konumunu bilmek gerekir. Her noktanın konumu içinde P(x,y,z) olmak üzere üç parametreye ihtiyaç vardır. Dolayısı ile cismin üç noktası için toplam 9 paremetre ihtiyaç olacaktır [(P 1 (x 1,y 1,z 1 ), (P 2 (x 2,y 2,z 2 ), (P 3 (x 3,y 3,z 3 )]. Fakat uzaydaki her iki nokta arasında bir bağıntı oluşturursak, ki bu bağıntı iki nokta arasındaki uzaklığı veren bağıntıdır, bu şekilde noktaları birbirine bağlayarak gerekli parametre sayısı azaltılabilir. Bu durumda üç nokta arasında üçtane de mesafe denklemi yazarsak gerekli parametre sayısı 9-3=6 ya düşürülmüş olur. Yani uzaydaki bir cismin serbestlik derecesi 6 dır. Noktalar arasındaki mesafe denklemleri şu şekilde olacaktır. b) Düzlemde Bir Cismin Serbestlik Derecesi Bir cismin düzlemde konumunu belirlemek için en 2 tane noktaya ihtiyaç vardır. Her noktanında düzlemde konumu için iki parametreye ihtiyaç olacaktır P(x,y). Bu durumda toplamda 4 tane parametreye ihtiyaç olacaktır [(P 1 (x 1,y 1 ), (P 2 (x 2,y 2 )]. Fakat iki noktayı birbirine bağlayan bir denklem oluşturulursa (mesafe denklemi) gerekli parametre sayısı 4-1=3 olacaktır. Yani düzlemde bir cismin konumunu belirlemek için 3 tane parametreye ihtiyaç vardır. İki nokta arasındaki mesafe denklemi şu şekilde olur. 5





6 c) Kinematik Çiftlerin Serbestlik Derecesi Prizmatik (kayar) Mafsal Prizmatik Kayar MafsalSadece x ekseni üzerinde hareket edebilmektedir. Serbestlik derecesi 1 dir. Döner Mafsal Sadece X ekseni üzerinde dönme vardır. Dolayısıyle serbestlik derecesi 1 dir. Silindirik Mafsal Sadece X ekseni üzerinde dönme ve öteleme yapabilir. Dolayısıyla serbestlik derecesi 2 dir. Vida Mafsal Dönme ve öteleme hareketi yapabilir ama bu iki hareket arasında bir ilişki söz konusudur. İki hareket birbirine bağımlıdır. Dolaysıyla serbestlik derecesi 1 dir. Düzlemsel mafsal Y ekseni üzerinde dönme, X ve Z eksenleri üzerinde öteleme yapabilir. Dolasıyla serbestlik derecesi 3 tür. 6

 sayısı da diyebiliriz.")
 j : Mekanizmadaki")
7 Küresel mafsal X,Y ve Z eksenlerinde dönme yapabilir. Dolayısıyla serbestlik derecesi 3 tür. Bunlardan başka daha çok sayıda kinematik çift için serbestlik derecesi yazılabilir. Burada verilenler sadece birer örnektir. d) Mekanizmanın Serbestlik Derecesi Bir mekanizmanın serbestlik derecesi, bir mekamizmada bulunan tüm uzuvların konumunu belirlemek için gerekli olan parametre sayısıdır. Mekanizmanın tüm noktalarını kontrol altında tutabilmek için gerekli olan tahrik (motor) sayısı da diyebiliriz. Örneğin bir uzvundan hareket ettirdiğimizde tüm uzuvları hareket ediyorsa bu mekanizm bir serbestlik derecelidir. Gerekli olan parametre sayısı uzuvların boyutlarına bağlı değildir. Serbestlik Derecesi Denklemi F: Mekanizmanın serbestlik derecesi λ: Düzlemsel mekanizmalar için 3 λ: Uzaysal mekanizmalar için 6 : Mekanizmadaki uzuv sayısı (sabit uzuv dahil) j : Mekanizmadaki mafsal sayısı f i : Mafsalın serbestlik derecesi Serbestlik derecesi denklemi, birçok mekanizma için geçerli ise de bu denkleme uymayan mekanizmalar da bulunmaktadır. Bunun nedeni bu denklemin elde edilişi sırasında yapılmış olan varsayımlardır. Bu varsayımların en önemlisi mafsalların getirmiş olduğu hareket sınırlamalarının birbirlerinden bağımsız olmasıdır. Ancak uzuv boyutlarının belirli değerler alması durumunda bu varsayım geçerli olmayabilir ve mekanizma serbestlik derecesi denklemi bazı mekanizmalar için doğru sonuçlar vermeyebilir. Bu özel durumları görmeden önce denklemin geçerli olduğu mekanizmaların inceleyelim. Serbestlik Derecesi Hesaplanabilen Bazı Mekanizmalar Krank biyel mekanizması l=4 (uzuv sayısı) j=4 (mafsal sayısı: 1-2 (dönel,sd=1), 2-3 (dönel, SD=1), 3-4(dönel, SD=1), 4-1(kayar, SD=1) Σf i =f 1 +f 2 + f 3 +f 4 =4 (tüm mafsallar 1 serbestlik dereceli) λ=3 (Düzlemsel mekanizma) F=3(4-4-1)+4 F=1 (Mekanizmanın serbestlik derecesi) Dört çubuk mekanizması 7


8 Beş çubuk mekanizması l=5 j=5 Σf i = =5 λ=3 (Düzlemsel mekanizma) F=3(5-5-1)+5 F=2 Vargel mekanizması Uzaysal 4 çubuk mekanizması Kazıcı kepçe 8
 j=6 (mafsal sayısı: Tüm mafsallar dönel, SD=1 dir.")
 Örnek Mekanizma 1 Burada verilenlerden başka daha çok sayıda mekanizma için serbestlik derecesi hesabı yapılabilir.")
 Kinematik yer değişim, kinematik zincir içindeki uzuvlardan her seferinde bir başkasını sabit olmasını sağlayarak, aynı zincirden farklı mekanizmalar")
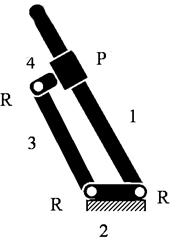
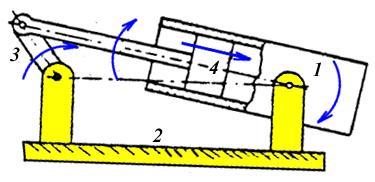
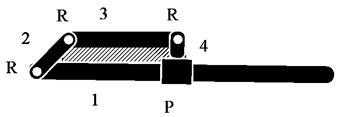
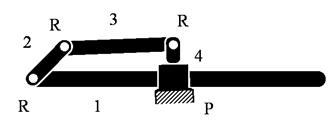
9 Yükleyici kepçe l=9 j=11 (9 döner mafsal, 2 kayar mafsal) Σf i =11*1=11 (Tüm mafsallar 1 serbestlik dereceli) λ=3 (Düzlemsel mekanizma) F=3(9-11-1)+11 F=2 (Mekanizman serbestlik derecesi) Serbestlik Derecesi Hesaplanamayan Bazı Mekanizmalar Örnek Mekanizma 1 l=5 (uzuv sayısı) j=6 (mafsal sayısı: Tüm mafsallar dönel, SD=1 dir.) Σf i =f 1 +f 2 + f 3 +f 4 + f 5 +f 6 =6 (tüm mafsallar 1 serbestlik dereceli) λ=3 (Düzlemsel mekanizma) F=3(5-6-1)+6 F=0 (Mekanizmanın serbestlik derecesi 0 çıkıyor ama mekanizma hareket edebiliyor. Dolayısı ile formül hesaplamadı.) Örnek Mekanizma 1 Burada verilenlerden başka daha çok sayıda mekanizma için serbestlik derecesi hesabı yapılabilir. Burada verilenler konunun anlaşılmsı için verilen birer örnektir. Kinematik Yer değişim (Kinematik Mübadele) Kinematik yer değişim, kinematik zincir içindeki uzuvlardan her seferinde bir başkasını sabit olmasını sağlayarak, aynı zincirden farklı mekanizmalar oluşturma işlemidir. Örneğin üçtane dönebilen (Rotary=R) ve bir tane kayar mafsal (Piston=P) birleştirdiği üç çubuk ve bir pistonun oluşturduğu kinematik zinciri RRRP olarak gösterelim. Bu zincir üzerinde her seferinde bir başka elemanı sabitlersek farklı farklı mekanizmalar elde ederiz. Aşağıdaki şekillerde sırasıyla önce 1 nolu elemanı sabitleyelim. Daha sonra 2,3,4 nolu elemanlar sabitlendiğinde her seferinde farklı çalışan bir mekanizma ortaya çıkmaktadır. 9
10 10
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU -1-
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:[email protected] Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:[email protected] Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Makina Dinamiği. Yrd. Doç. Dr. Semih Sezer.
 Yrd. Doç. Dr. Semih Sezer Makina Dinamiği [email protected] Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Yrd. Doç. Dr. Semih Sezer Makina Dinamiği [email protected] Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:[email protected] Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:[email protected] Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR
 MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR DÜZLEMSEL MEKANİZMALAR Güç ve hareket aktarımında kullanılan önemli makine elemanlarındadır. Düzlemsel Mekanizma Tanımı Mekanik parçaların bir araya getirilmesiyle
MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR DÜZLEMSEL MEKANİZMALAR Güç ve hareket aktarımında kullanılan önemli makine elemanlarındadır. Düzlemsel Mekanizma Tanımı Mekanik parçaların bir araya getirilmesiyle
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi
 1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi Öğretim Üyesi: Yrd. Doç. Dr. Nurdan Bilgin Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres
1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi Öğretim Üyesi: Yrd. Doç. Dr. Nurdan Bilgin Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres
Makina Dinamiği MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ
 MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
8. Silindirlerin Düzenleniş Şekline Göre
 8. Silindirlerin Düzenleniş Şekline Göre 1/40 Sıra Motor 2/40 V- Motor 3/40 Ferrari V12 65 o motoru 375 kw (7000 devir/dakikada) D/H 86/75 mm 5474 cc 4/40 Boksör Motor 5/40 Yıldız Tip Motor 6/40 Karşı
8. Silindirlerin Düzenleniş Şekline Göre 1/40 Sıra Motor 2/40 V- Motor 3/40 Ferrari V12 65 o motoru 375 kw (7000 devir/dakikada) D/H 86/75 mm 5474 cc 4/40 Boksör Motor 5/40 Yıldız Tip Motor 6/40 Karşı
MÜHENDİSLİK MEKANİĞİ (STATİK)
") MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU KİNEMATİK DİYAGRAM 2 Kinematik Diyagram, mekanizmaların uzuvlarını şekil ve ölçülerinden ziyade şematik olarak göstermeyi ve uzuvların mafsallarla bağlanabilirliğini
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU KİNEMATİK DİYAGRAM 2 Kinematik Diyagram, mekanizmaların uzuvlarını şekil ve ölçülerinden ziyade şematik olarak göstermeyi ve uzuvların mafsallarla bağlanabilirliğini
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
TEKNOLOJİNİN BİLİMSEL İLKELERİ
 TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
ÜÇ ÇUBUK MEKANİZMASI
 ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
Mekanizma Tekniği. Yrd. Doç. Dr. Cihan Demir. Mekanizma Tekniği 1. T-Blok YIL1979
 Yrd. Doç. Dr. Cihan Demir Mekanizma Tekniği 1 [email protected] T-Blok YIL1979 Dersin İçeriği Mekanizma Tekniğinde Ana Kavramlar, Eleman Çiftleri, Kinematik Zincirler, Serbestlik Derecesi, Mecburi Hareketlilik,
Yrd. Doç. Dr. Cihan Demir Mekanizma Tekniği 1 [email protected] T-Blok YIL1979 Dersin İçeriği Mekanizma Tekniğinde Ana Kavramlar, Eleman Çiftleri, Kinematik Zincirler, Serbestlik Derecesi, Mecburi Hareketlilik,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
KAVRAMALAR SAKARYA ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU. Doç.Dr. Akın Oğuz KAPTI
 KAVRAMALAR MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU Doç.Dr. Akın Oğuz KAPTI Kavramalar / 4 Kavramaların temel görevi iki mili birbirine bağlamaktır. Bu temel görevin yanında şu fonksiyonları
KAVRAMALAR MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU Doç.Dr. Akın Oğuz KAPTI Kavramalar / 4 Kavramaların temel görevi iki mili birbirine bağlamaktır. Bu temel görevin yanında şu fonksiyonları
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Doç. Dr. Cihan Demir. Mekanizma Tekniği 1
 Doç. Dr. Cihan Demir [email protected] A-Blok 509 Dersin İçeriği nde Ana Kavramlar, Eleman Çiftleri, Kinematik Zincirler, Serbestlik Derecesi, Mecburi Hareketlilik, Üç Çubuk Mekanizmaları ve Grashoff
Doç. Dr. Cihan Demir [email protected] A-Blok 509 Dersin İçeriği nde Ana Kavramlar, Eleman Çiftleri, Kinematik Zincirler, Serbestlik Derecesi, Mecburi Hareketlilik, Üç Çubuk Mekanizmaları ve Grashoff
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
MAKİNA ELEMANLARI. İŞ MAKİNALARI (Vinç, greyder, torna tezgahı, freze tezgahı, matkap, hidrolik pres, enjeksiyon makinası gibi)
") MAKİNA ELEMANLARI Makina: Genel anlamda makina; enerji veya güç üreten, ileten veya değiştiren sistemdir. Örneğin; motor, türbin, jeneratör, ısı pompası, elektrik makinası, tekstil makinası, takım tezgâhı,
MAKİNA ELEMANLARI Makina: Genel anlamda makina; enerji veya güç üreten, ileten veya değiştiren sistemdir. Örneğin; motor, türbin, jeneratör, ısı pompası, elektrik makinası, tekstil makinası, takım tezgâhı,
Doç. Dr. Bilge DORAN
 Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK
 Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): [email protected] Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): [email protected] Öğrenci Başarısı Değerlendirme... Öğrencinin
KONU 3. STATİK DENGE
 KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
MOMENT. Momentin büyüklüğü, uygulanan kuvvet ile, kuvvetin sabit nokta ya da eksene olan dik uzaklığının çarpımına eşittir.
 MOMENT İki noktası ya da en az bir noktası sabit olan cisimlere uygulanan kuvvet cisme sabit bir nokta veya eksen etrafında dönme hareketi yaptırır. Kapı ve pencereleri açıp kapanması, musluğu açıp kapatmak,
MOMENT İki noktası ya da en az bir noktası sabit olan cisimlere uygulanan kuvvet cisme sabit bir nokta veya eksen etrafında dönme hareketi yaptırır. Kapı ve pencereleri açıp kapanması, musluğu açıp kapatmak,
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İÇİNDEKİLER ÖNSÖZ Bölüm 1 DAİRESEL HAREKET Bölüm 2 İŞ, GÜÇ, ENERJİ ve MOMENTUM
 ÖNSÖZ İÇİNDEKİLER III Bölüm 1 DAİRESEL HAREKET 11 1.1. Dairesel Hareket 12 1.2. Açısal Yol 12 1.3. Açısal Hız 14 1.4. Açısal Hız ile Çizgisel Hız Arasındaki Bağıntı 15 1.5. Açısal İvme 16 1.6. Düzgün Dairesel
ÖNSÖZ İÇİNDEKİLER III Bölüm 1 DAİRESEL HAREKET 11 1.1. Dairesel Hareket 12 1.2. Açısal Yol 12 1.3. Açısal Hız 14 1.4. Açısal Hız ile Çizgisel Hız Arasındaki Bağıntı 15 1.5. Açısal İvme 16 1.6. Düzgün Dairesel
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
4.1 denklemine yakından bakalım. Tanımdan α = dω/dt olduğu bilinmektedir (ω açısal hız). O hâlde eğer cisme etki eden tork sıfır ise;
. O hâlde eğer cisme etki eden tork sıfır ise;") Deney No : M3 Deneyin Adı : EYLEMSİZLİK MOMENTİ VE AÇISAL İVMELENME Deneyin Amacı : Dönme hareketinde eylemsizlik momentinin ne demek olduğunu ve nelere bağlı olduğunu deneysel olarak gözlemlemek. Teorik
Deney No : M3 Deneyin Adı : EYLEMSİZLİK MOMENTİ VE AÇISAL İVMELENME Deneyin Amacı : Dönme hareketinde eylemsizlik momentinin ne demek olduğunu ve nelere bağlı olduğunu deneysel olarak gözlemlemek. Teorik
 5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
MAK 4004 BİTİRME ÖDEVİ DERSİ PROJE ÖNERİSİ
 - ULUDAĞ ÜNİVERSİTESİ Form BTP-01 (1/) BAHAR 007-008 4/01/008 Taşıt Hareket Denklemlerinin Bilgisayar Yardımıyla Çözümü 1. Taşıta etkiyen kuvvetlerin belirlenmesi. Düz harekette taşıt hareket denklemlerinin
- ULUDAĞ ÜNİVERSİTESİ Form BTP-01 (1/) BAHAR 007-008 4/01/008 Taşıt Hareket Denklemlerinin Bilgisayar Yardımıyla Çözümü 1. Taşıta etkiyen kuvvetlerin belirlenmesi. Düz harekette taşıt hareket denklemlerinin
Hız-Moment Dönüşüm Mekanizmaları. Vedat Temiz
 Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
BURSA TECHNICAL UNIVERSITY (BTU) 2 DİŞLİ ÇARKLAR I: GİRİŞ
 2 DİŞLİ ÇARKLAR I: GİRİŞ") Makine Elemanları 2 DİŞLİ ÇARKLAR I: GİRİŞ 1 Bu bölümden elde edilecek kazanımlar Güç Ve Hareket İletim Elemanları Basit Dişli Dizileri Redüktörler Ve Vites Kutuları : Sınıflandırma Ve Kavramlar Silindirik
Makine Elemanları 2 DİŞLİ ÇARKLAR I: GİRİŞ 1 Bu bölümden elde edilecek kazanımlar Güç Ve Hareket İletim Elemanları Basit Dişli Dizileri Redüktörler Ve Vites Kutuları : Sınıflandırma Ve Kavramlar Silindirik
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 6 Yapısal Analiz Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 6. Yapısal Analiz Şekilde görüldüğü
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 6 Yapısal Analiz Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 6. Yapısal Analiz Şekilde görüldüğü
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
STATİK. Prof. Dr. Akgün ALSARAN - Öğr. Gör. Fatih ALİBEYOĞLU -8-
 1 STATİK Prof. Dr. Akgün ALSARAN - Öğr. Gör. Fatih ALİBEYOĞLU -8- Giriş 2 Denge denklemlerini, mafsala bağlı elemanlarda oluşan yapıları analiz etmek için kullanacağız. Bu analiz, dengede olan bir yapının
1 STATİK Prof. Dr. Akgün ALSARAN - Öğr. Gör. Fatih ALİBEYOĞLU -8- Giriş 2 Denge denklemlerini, mafsala bağlı elemanlarda oluşan yapıları analiz etmek için kullanacağız. Bu analiz, dengede olan bir yapının
ASİSTAN ARŞ. GÖR. GÜL DAYAN
 ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
MAKİNE MÜHENDİSLİĞİNE GİRİŞ Doç.Dr.İrfan AY-Arş.Gör.T.Kerem DEMİRCİOĞLU MAKİNE PARÇALARINI ETKİLEYEN KUVVETLER VE GERİLMELER
 MAKİNE PARÇALARINI ETKİLEYEN KUVVETLER VE GERİLMELER Dış Kuvvetler : Katı cisimlere uygulanan kuvvet cismi çekmeye, basmaya, burmaya, eğilmeye yada kesilmeye zorlar. Cisimde geçici ve kalıcı şekil değişikliği
MAKİNE PARÇALARINI ETKİLEYEN KUVVETLER VE GERİLMELER Dış Kuvvetler : Katı cisimlere uygulanan kuvvet cismi çekmeye, basmaya, burmaya, eğilmeye yada kesilmeye zorlar. Cisimde geçici ve kalıcı şekil değişikliği
BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER
 BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Yrd. Doç. Dr. Beytullah EREN Çevre Mühendisliği Bölümü BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Atatürk Barajı (Şanlıurfa) BATMIŞ YÜZEYLERE ETKİYEN KUVVETLER
BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Yrd. Doç. Dr. Beytullah EREN Çevre Mühendisliği Bölümü BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Atatürk Barajı (Şanlıurfa) BATMIŞ YÜZEYLERE ETKİYEN KUVVETLER
 9.1 9.2 9.3 9.4 9.5 9.6 Uzayda Serbestlik Derecesi Rijit Cismin Uzayda Dengesi Bir Uzay Kuvvetin Bileşenleri Bir Noktada Kesişen Uzay Kuvvetlerde Bileşke Bir Eksene Göre Statik Moment Kuvvetler Sistemini
9.1 9.2 9.3 9.4 9.5 9.6 Uzayda Serbestlik Derecesi Rijit Cismin Uzayda Dengesi Bir Uzay Kuvvetin Bileşenleri Bir Noktada Kesişen Uzay Kuvvetlerde Bileşke Bir Eksene Göre Statik Moment Kuvvetler Sistemini
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
DİŞLİ ÇARK MEKANİZMALARI
 DİŞLİ ÇARK MEKANİZMALARI Hareket ve güç iletiminde kullanılan,üzerinde eşit aralıklı ve özel profilli girinti ve çıkıntıları bulunan silindirik veya konik yüzeyli elemanlara DİŞLİ ÇARKLAR denir. Dişli
DİŞLİ ÇARK MEKANİZMALARI Hareket ve güç iletiminde kullanılan,üzerinde eşit aralıklı ve özel profilli girinti ve çıkıntıları bulunan silindirik veya konik yüzeyli elemanlara DİŞLİ ÇARKLAR denir. Dişli
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
EĞRİSEL HAREKET : Silindirik Bileşenler
 EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
TORK VE DENGE. İçindekiler TORK VE DENGE 01 TORK VE DENGE 02 TORK VE DENGE 03 TORK VE DENGE 04. Torkun Tanımı ve Yönü
 İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
Kesit Tesirleri Tekil Kuvvetler
 Statik ve Mukavemet Kesit Tesirleri Tekil Kuvvetler B ÖĞR.GÖR.GÜLTEKİN BÜYÜKŞENGÜR Çevre Mühendisliği Mukavemet Şekil Değiştirebilen Cisimler Mekaniği Kesit Tesiri ve İşaret Kabulleri Kesit Tesiri Diyagramları
Statik ve Mukavemet Kesit Tesirleri Tekil Kuvvetler B ÖĞR.GÖR.GÜLTEKİN BÜYÜKŞENGÜR Çevre Mühendisliği Mukavemet Şekil Değiştirebilen Cisimler Mekaniği Kesit Tesiri ve İşaret Kabulleri Kesit Tesiri Diyagramları
Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir.
 STATIK VE MUKAVEMET 4. Ağırlık Merkezi AĞIRLIK MERKEZİ Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir. Statikte çok küçük bir alana etki eden birbirlerine
STATIK VE MUKAVEMET 4. Ağırlık Merkezi AĞIRLIK MERKEZİ Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir. Statikte çok küçük bir alana etki eden birbirlerine
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
STATİK (1. Hafta) Giriş TEMEL KAVRAMLAR
 Giriş TEMEL KAVRAMLAR") Giriş STATİK (1. Hafta) Mühendislik öğrencilerine genellikle ilk yıllarda verilen temel derslerin başında gelir. Sabit sistemler üzerindeki kuvvet ve momentleri inceleyen bir bilim dalıdır. Kendisinden
Giriş STATİK (1. Hafta) Mühendislik öğrencilerine genellikle ilk yıllarda verilen temel derslerin başında gelir. Sabit sistemler üzerindeki kuvvet ve momentleri inceleyen bir bilim dalıdır. Kendisinden
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Hidrostatik Güç İletimi. Vedat Temiz
 Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (4. Hafta)
") KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ
 Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ
 1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
DENEY 5 DÖNME HAREKETİ
 DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
TORK VE DENGE 01 Torkun Tanımı ve Yönü
 TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
ELK-301 ELEKTRİK MAKİNALARI-1
 ELK-301 ELEKTRİK MAKİNALARI-1 KAYNAKLAR 1. Prof. Dr. Güngör BAL, Elektrik Makinaları I, Seçkin Yayınevi, Ankara 2016 2. Stephen J. Chapman, Elektrik Makinalarının Temelleri, Çağlayan Kitabevi, 2007, Çeviren:
ELK-301 ELEKTRİK MAKİNALARI-1 KAYNAKLAR 1. Prof. Dr. Güngör BAL, Elektrik Makinaları I, Seçkin Yayınevi, Ankara 2016 2. Stephen J. Chapman, Elektrik Makinalarının Temelleri, Çağlayan Kitabevi, 2007, Çeviren:
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (2. Hafta)
") AĞIRLIK MERKEZİ STATİK (2. Hafta) Ağırlık merkezi: Bir cismi oluşturan herbir parçaya etki eden yerçeki kuvvetlerinin bileşkesinin cismin üzerinden geçtiği noktaya Ağırlık Merkezi denir. Şekil. Ağırlık
AĞIRLIK MERKEZİ STATİK (2. Hafta) Ağırlık merkezi: Bir cismi oluşturan herbir parçaya etki eden yerçeki kuvvetlerinin bileşkesinin cismin üzerinden geçtiği noktaya Ağırlık Merkezi denir. Şekil. Ağırlık
MUKAVEMET Öğr. Gör. Fatih KURTULUŞ
 www.sakarya.edu.tr MUKAVEMET Öğr. Gör. Fatih KURTULUŞ www.sakarya.edu.tr 1. DÜŞEY YÜKLÜ KİRİŞLER Cisimlerin mukavemeti konusunun esas problemi, herhangi bir yapıya uygulanan bir kuvvetin oluşturacağı gerilme
www.sakarya.edu.tr MUKAVEMET Öğr. Gör. Fatih KURTULUŞ www.sakarya.edu.tr 1. DÜŞEY YÜKLÜ KİRİŞLER Cisimlerin mukavemeti konusunun esas problemi, herhangi bir yapıya uygulanan bir kuvvetin oluşturacağı gerilme
GEOMETRİK TOLERANSLAR - ŞEKİL VE KONUM TOLERANSLARI (YENİ) -
 -") GEOMETRİK TOLERANSLAR - ŞEKİL VE KONUM TOLERANSLARI (YENİ) - H. Rıza BÖRKLÜ Gazi Üniversitesi Teknoloji Fakültesi Endüstriyel Tasarım Mühendisliği Bölümü Teknikokullar - ANKARA 26.04.2016 1 26.04.2016
GEOMETRİK TOLERANSLAR - ŞEKİL VE KONUM TOLERANSLARI (YENİ) - H. Rıza BÖRKLÜ Gazi Üniversitesi Teknoloji Fakültesi Endüstriyel Tasarım Mühendisliği Bölümü Teknikokullar - ANKARA 26.04.2016 1 26.04.2016
FRENLER SAKARYA ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU
 FRENLER MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU Frenler 2 / 20 Frenler, sürtünme yüzeyli kavramalarla benzer prensiplere göre çalışan bir makine elemanı grubunu oluştururlar. Şu şekilde
FRENLER MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU Frenler 2 / 20 Frenler, sürtünme yüzeyli kavramalarla benzer prensiplere göre çalışan bir makine elemanı grubunu oluştururlar. Şu şekilde
STATİK AĞIRLIK MERKEZİ. 3.1 İki Boyutlu Cisimler 3.2 Düzlem Eğriler 3.3 Bileşik Cisimler. 3.4 Integrasyon ile ağırlık merkezi hesabı
 1 STATİK AĞIRLIK MERKEZİ 3.1 İki Boyutlu Cisimler 3.2 Düzlem Eğriler 3.3 Bileşik Cisimler 3.4 Integrasyon ile ağırlık merkezi hesabı 3.5 Pappus-Guldinus Teoremi 3.6 Yayılı Yüke Eşdeğer Tekil Yük 3.7 Sıvı
1 STATİK AĞIRLIK MERKEZİ 3.1 İki Boyutlu Cisimler 3.2 Düzlem Eğriler 3.3 Bileşik Cisimler 3.4 Integrasyon ile ağırlık merkezi hesabı 3.5 Pappus-Guldinus Teoremi 3.6 Yayılı Yüke Eşdeğer Tekil Yük 3.7 Sıvı
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı. Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
KOÜ. Mühendislik Fakültesi Makine Mühendisliği Bölümü (1. ve 2.Öğretim / B Şubesi) MMK208 Mukavemet II Dersi - 1. Çalışma Soruları 23 Şubat 2019
 MMK208 Mukavemet II Dersi - 1. Çalışma Soruları 23 Şubat 2019") SORU-1) Aynı anda hem basit eğilme hem de burulma etkisi altında bulunan yarıçapı R veya çapı D = 2R olan dairesel kesitli millerde, oluşan (meydana gelen) en büyük normal gerilmenin ( ), eğilme momenti
SORU-1) Aynı anda hem basit eğilme hem de burulma etkisi altında bulunan yarıçapı R veya çapı D = 2R olan dairesel kesitli millerde, oluşan (meydana gelen) en büyük normal gerilmenin ( ), eğilme momenti
Yrd. Doç. Dr. Cihan Demir. Mekanizma Tekniği 2
 Yrd. Doç. Dr. Cihan Demir Mekanizma Tekniği 2 Dersin İçeriği Mekanizmalarda Hız ve İvme Analizi Düzlemsel Yürek (kam) Mekanizmaları, Hareket Diyagramları, Yürek Profillerinin Tayini, Yürek Mekanizmaları
Yrd. Doç. Dr. Cihan Demir Mekanizma Tekniği 2 Dersin İçeriği Mekanizmalarda Hız ve İvme Analizi Düzlemsel Yürek (kam) Mekanizmaları, Hareket Diyagramları, Yürek Profillerinin Tayini, Yürek Mekanizmaları
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Prof. Dr. İrfan KAYMAZ
 Prof. Dr. İrfan KAYMAZ Mühendislik Fakültesi Makine Mühendisliği Bölümü Giriş Bu bölüm sonunda öğreneceğiniz konular: Kayış-kasnak mekanizmalarının türü Kayış türleri Meydana gelen kuvvetler Geometrik
Prof. Dr. İrfan KAYMAZ Mühendislik Fakültesi Makine Mühendisliği Bölümü Giriş Bu bölüm sonunda öğreneceğiniz konular: Kayış-kasnak mekanizmalarının türü Kayış türleri Meydana gelen kuvvetler Geometrik
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
KAYMA GERİLMESİ (ENİNE KESME)
") KAYMA GERİLMESİ (ENİNE KESME) Demir yolu traversleri çok büyük kesme yüklerini taşıyan kiriş olarak davranır. Bu durumda, eğer traversler ahşap malzemedense kesme kuvvetinin en büyük olduğu uçlarından
KAYMA GERİLMESİ (ENİNE KESME) Demir yolu traversleri çok büyük kesme yüklerini taşıyan kiriş olarak davranır. Bu durumda, eğer traversler ahşap malzemedense kesme kuvvetinin en büyük olduğu uçlarından
İ çindekiler. xvii GİRİŞ 1 TEMEL AKIŞKANLAR DİNAMİĞİ BERNOULLİ DENKLEMİ 68 AKIŞKANLAR STATİĞİ 32. xvii
 Last A Head xvii İ çindekiler 1 GİRİŞ 1 1.1 Akışkanların Bazı Karakteristikleri 3 1.2 Boyutlar, Boyutsal Homojenlik ve Birimler 3 1.2.1 Birim Sistemleri 6 1.3 Akışkan Davranışı Analizi 9 1.4 Akışkan Kütle
Last A Head xvii İ çindekiler 1 GİRİŞ 1 1.1 Akışkanların Bazı Karakteristikleri 3 1.2 Boyutlar, Boyutsal Homojenlik ve Birimler 3 1.2.1 Birim Sistemleri 6 1.3 Akışkan Davranışı Analizi 9 1.4 Akışkan Kütle
MÜHENDİSLİK MEKANİĞİ (STATİK)
") MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ KÜTLE ATALET MOMENTİ Bugünün Hedefleri: 1. Rijit bir cismin
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ KÜTLE ATALET MOMENTİ Bugünün Hedefleri: 1. Rijit bir cismin
STATIK MUKAVEMET. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme