İmage segmentasyon (Görüntü Bölütleme)
|
|
|
- Koray Derviş
- 10 yıl önce
- İzleme sayısı:
Transkript
1 İmage segmentasyon (Görüntü Bölütleme)
2 Segmantasyon (Bölütleme) Segmentasyon genellikle görüntü analizinin ilk aşamasıdır. Görüntü bölütleme, bir görüntüyü her biri içerisinde farklı özelliklerin tutulduğu anlamlı bölgelere ayırmak olarak tarif edilebilir. Örneğin, görüntü içerisindeki benzer parlaklıklar olabilir ve bu parlaklıklar ilgili görüntünün farklı bölgelerindeki nesneleri temsil edebilir. Uygulamaya bağlı olarak değişebilen bu segmentlere (bölütler-elemanlar) başka bir örnek olarak; hava-yer fotoğrafında, yolda hareket eden araçları ve çevreyi yoldan ayırt edebilmek için bir segmentleme yapılabilir. (Yolu çevreden ayırabilen bir segmentleme) Unutulmamalıdır ki, tüm görüntülere uygulanabilecek genel (universal) bir bölütleme yöntemi yoktur ve hiçbir bölütleme yöntemi mükemmel değildir. Başka bir deyişle, görüntü iyileştirme ve onarma problemlerinde olduğu gibi görüntü bölütleme için tasarlanan yöntemler ve bu yöntemlerin başarımları, görüntüden görüntüye ve uygulamaya dayalı olarak değişiklik arz eder. Otomatik görüntü segmentasyonu görüntü işlemenin en zor işlemlerinden biridir.
 başka bir örnek olarak; hava-yer fotoğrafında, yolda hareket eden araçları ve çevreyi yoldan ayırt edebilmek için bir")
3 Segmantasyonun (Bölütleme) özellikleri Görüntü bölütleme; R görüntüsünü R1, R2. Rn bölgelerine bölme sürecidir. Segmantasyon tamamlandığında: Herbir bölge uniform dur (Tek tiptir). Bölgeler biribirini üzerine çakışmaz. Bir bölgenin pikselleri ortak özelliğe sahiptir. i n R i 1 R R R, i j i j P R i TRUE Komşu bölgelerin farklı özellikleri vardır. P R P R R, R komsudur. i j, i j Gri seviyeli görüntülerde segmantasyon algoritmaları ;gri seviye (parlaklık) değerlerinin süreksizlik ve benzerlik özelliğine dayandırılır. Süreksizlik tabanlı bölütleme algoritmaları; Izole nokta, ince çizgi veya resim kenarları gibi (gri seviye değerleri birden değişen) süreksizlikleri, düşük ve yüksek filtrelemedeki gibi benzer maskeler kullanarak tespit edebilmeye dayanır. Benzerlik tabanlı bölütleme algoritmaları ; ya eşikleme, bölgede büyüyen, ya da bölge bölme ve birleştirmeye dayanmaktadır.
 süreksizlikleri, düşük ve yüksek filtrelemedeki gibi benzer")
4 Benzerlik Tabanlı Görüntü bölütleme algoritmaları Gri seviye değerlerindeki benzerliklere göre görüntü bölütleme, bölge bölütlemesi (region segmentation) olarak bilinir. Eşikleme (thresholding), büyütme (growing), ve yarma - kaynaştırma (split- and -merge) işlemlerine dayalı olarak gerçekleştirilir. Piksellerin gri seviye değerlerindeki benzerlik veya farklılıklara dayalı olarak bir görüntünün bölütlenmesi kavramı hem durağan (static) hem de dinamik (zamanla değişen) görüntülere uygulanabilir[r].

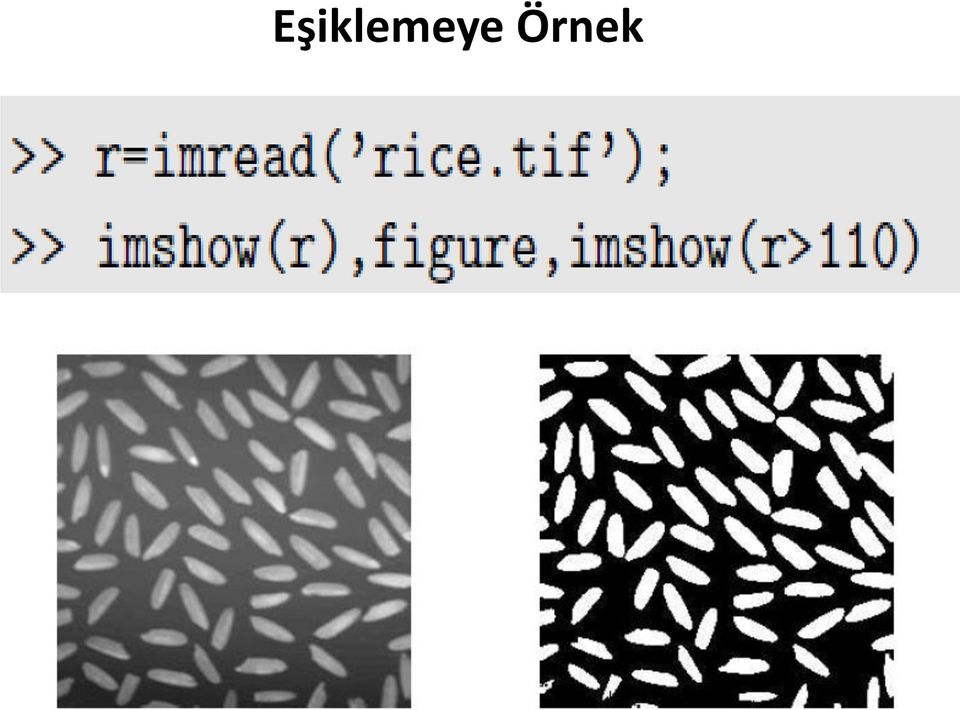
5 Eşikleme (Thresholding) Eşikleme, görüntü bölütleme amacı için kullanılan en önemli yaklaşımlardan birisidir. Eşikleme işleminden amaç, görüntü içerisindeki nesneleri görüntü arka planından ayırmaktır. Eşikleme için, görüntüdeki gri seviye dağılımlarını gösteren görüntü histogramından faydalanılır. Örneğin, koyu bir arka plan üzerinde açık renkli nesnelerden oluşan f(i, j) görüntüsüne ilişkin histogramı Şekil (a) daki biçime sahip olacaktır. Bu histograma göre, nesnelere ve arka plana ait pikseller olmak üzere, görüntüyü iki ana grupta değerlendirmek mümkündür. Bu durumda nesneleri arka plandan ayırmak için en kolay yol, histogramdan göreceli olarak belirlenen bir T eşik değeri ile görüntüdeki piksel değerlerini karşılaştırmak olacaktır. Buna göre, görüntüdeki herhangi bir (i, j) pikseli için; f(i, j) > T ise (i, j) pikseli nesneye ait bir nokta, f(i,j) T ise (i, j) pikseli arka plana ait bir nokta olacaktır.

6 Eşiklemeye Örnek
7 Görüntüye ilişkin Histogram Şekil. b deki gibi; ikisi nesneye biri de arka plana ait olmak üzere üç gri seviye grubundan da oluşabilir. Buna göre; görüntüdeki herhangi bir (i, j) pikselleri için; T1 < f(i, j) T2 aralığındaki ise bir nesneye, f(i, j) > T2 aralığındaki pikseller diğer bir nesneye ve f(i, j) T1 aralığındaki pikseller de görüntü arka planına karşı düşecektir.
 pikselleri için; T1 < f(i, j) T2 aralığındaki ise")
8 Aşağıda genel bir eşikleme fonksiyonu ve Eşiklenmiş bir g(x,y) görüntüsünün bağıntısı verilmiştir. 1 ile belirlenen pikseller nesneye, 0 ile etiketlenen pikseller ise arka plana denk gelir. T Eşikleme fonksiyonun da; f(x,y), (x,y) noktasındaki gri seviyenin değerini, p(x,y) ise bu noktanın bazı bölgesel özelliklerini belirtir. Örneğin bu özellik (x,y) noktasının komşuluğundaki piksel gri seviye değerlerinin ortalaması olabilir Eğer ki T sadece f(x,y) ye bağlı ise bu durumda aşağıdaki T eşitliği ile belirlenen eşik değeri bütünsel (global) eşik olarak adlandırılır. Şekil (a), böyle bir eşik değerine örnektir. Eğer T hem f(x,y) hem de p(x,y) ye bağlı ise bu durumda aşağıdaki T denklemindeki eşik değeri bölgesel (local) eşik olarak adlandırılır. Buna ek olarak, Eğer T, x ve y uzaysal koordinatlarına bağlı ise bu durumda T denkleminde belirlenen eşik değeri dinamik eşik olarak adlandırılır.
 eşik olarak adlandırılır. Şekil (a), böyle bir eşik değerine örnektir.")

9 Bütünsel (Global) Eşikleme Tüm eşikleme tekniklerinin en basiti, Şekil (a) da gösterildiği gibi tek bir eşik değeri kullanarak görüntü histogramını ve dolayısıyla görüntüyü bölütler. Bu bölütleme yönteminin başarısı, görüntü histogramının iyi bir biçimde bölmelenmesine bağlıdır. Şekilde bütünsel eşikleme işlemi sonucu elde edilen görüntü sonuçları verilmiştir (Anlaşılacağı gibi sonuç resim bir binary-siyah-beyaz) resimdir. Graythresh fonksiyonu resmin historamını alıp, histogramı en uygun şekilde 2 kısma bölütler. (OTSU modeline göre) > a=imread('cameraman.tif'); >> imshow(a); >> T= graythresh(a) T = >> T= graythresh(a); >> d=im2bw(a,t); >> imshow(d);
 > a=imread('cameraman.")
10 Global eşiklemenin uygulanacağı görüntülerde, aydınlatmanın önemli bir payı vardır. Şöyle ki, farklı aydınlatmalara maruz kalmış nesnenin bütünsel eşikleme sonucunda üreteceği ikili görüntüler farklı olacaktır. Bu çerçeveden bakıldığında, büyük oranda kontrol edilebilen ortamlara bütünsel eşiklemenin başarıyla uygulanabileceği açıktır. Global eşiklemenin kullanılabileceği alanlar, endüstriyel muayene uygulamaları olarak verilebilir çünkü bu tür uygulamalarda aydınlatmanın kontrol edilebilmesi genellikle mümkündür. Global eşiklemede uygun eşik değeri aşağıdaki algoritmaya göre belirlenebilir. 1- Görüntü içindeki en küçük ve enbüyük gri seviye değerini belirleyip orta değeri T olarak belirle. 2- T yi kullanarak görüntüyü segmentle.bu iki G1 ve G2 gibi iki farklı pixel gurubu oluşturacaktır. Pixel değerleri >= T ve pixel değerleri < T olarak). 3- Herbir segmentin ortalama gri seviye değerini m1 ve m2 olarak hesapla. 4- Bu ortalamalardan yeni T değerini aşağıdaki bağıntıyla hesap et ve 4. adımları, T0 toleransından küçük oluncaya kadar iteratif olarak yap.

11 Ödev OTSU yöntemini MATLAB ta gerçekleştiren m- file fonksiyonunu yazınız? Ödev Teslim Tarihi:

![Çift Eşikleme >> [x,map]=imread('spine.tif'); >> s=uint8(256*ind2gray(x,map)); >> imshow(s), >> b=imhist(s); >> imshow(s),figure, bar(b) >> imshow(s>115 & s<125) >> imshow(s>115) Buradaki spine.](/docs-images/27/12381442/images/12-0.png "tif görüntüsünün indekslenmiş bir görüntü olduğuna dikkat ediniz. Burada çift eşikleme T1=115, T2=125 arasındaki gri seviyelerin beyaz diğer değerlerin siyah olarak algılanması işlemidir.")
12 Çift Eşikleme >> [x,map]=imread('spine.tif'); >> s=uint8(256*ind2gray(x,map)); >> imshow(s), >> b=imhist(s); >> imshow(s),figure, bar(b) >> imshow(s>115 & s<125) >> imshow(s>115) Buradaki spine.tif görüntüsünün indekslenmiş bir görüntü olduğuna dikkat ediniz. Burada çift eşikleme T1=115, T2=125 arasındaki gri seviyelerin beyaz diğer değerlerin siyah olarak algılanması işlemidir. Buda resim üzerinde tek eşiklemeye göre daha çok sayıda segmantasyon oluşması anlamındadır.

; >> K=imhist(t) >> r=rand(256)*128+127; >> tr=uint8(r.*double(not(t)); >> imshow(tr) >> imshow(tr>100) 3.Satırdaki rand fonksiyon ile 256x256 lık bir matris oluşturulur.")
13 Eşikleme Uygulaması Arka planı gürültülü olan text leri (örneğin kotü çekilmiş fotokopileri) düzeltemek için kullanılan basit bir uygulamadır. >> t=imread('text.tif'); >> K=imhist(t) >> r=rand(256)* ; >> tr=uint8(r.*double(not(t)); >> imshow(tr) >> imshow(tr>100) 3.Satırdaki rand fonksiyon ile 256x256 lık bir matris oluşturulur. Matrisin elemanları 0-1 arasında değişir. Üretilen bu sayılar arasına dönüştürülür. Orijinal text görüntüsü, siyah arka plan üzerine beyaz yazıdır. Bunu not(t) ile tersine çevirip r gürültü fonksiyonu ile elemanter çarpma yapalım. Yeni görüntünün histogramını incelediğimizde, gray seviye değerini T=100 ile eşiklediğimizde aşağıdaki görüntü elde edilir.
 ile tersine çevirip r gürültü fonksiyonu ile elemanter çarpma yapalım.")
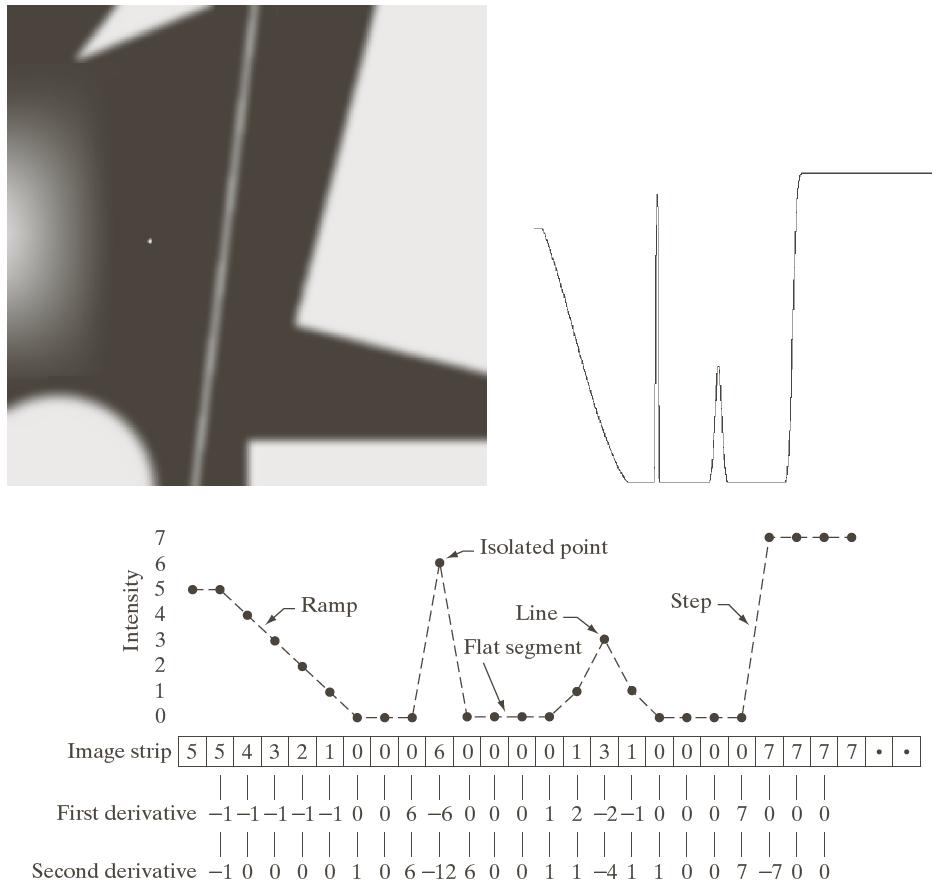
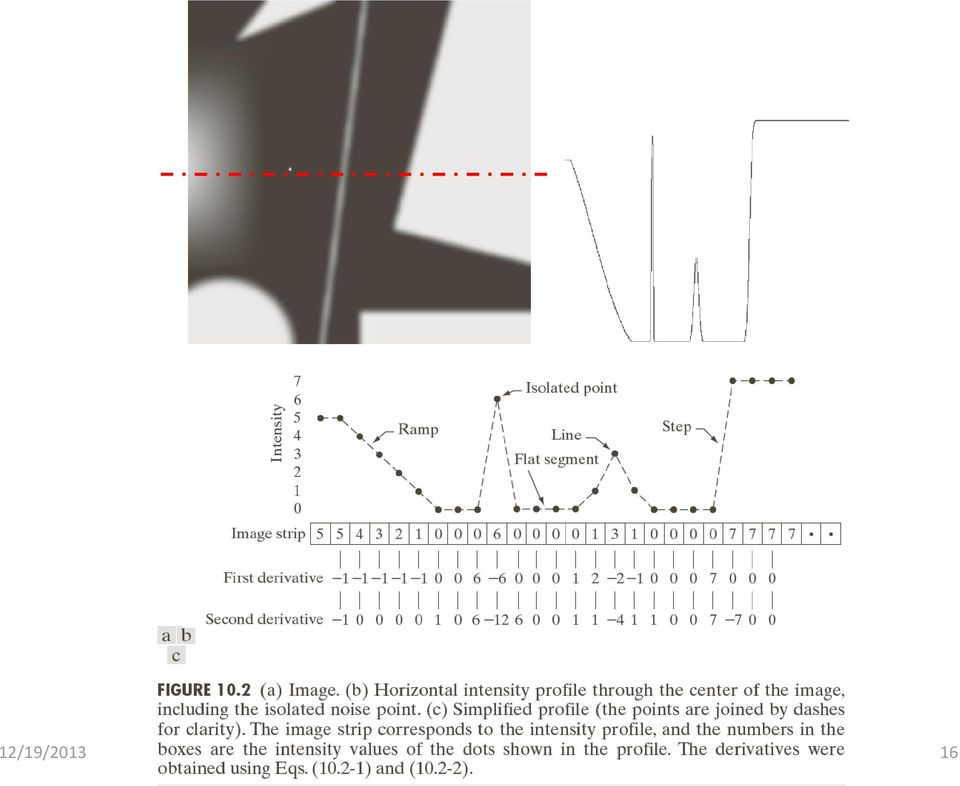
14 Süreksizlik tabanlı bölütleme algoritmaları Izole nokta, ince çizgi veya resim kenarları gibi (gri seviye değerleri ani değişen) süreksizlikleri, düşük ve yüksek filtrelemedekine benzer maskeler kullanarak tespit edebilmeye dayanır. Bu maskelerin temelini türev işlemleri (1. ve 2. türev) oluşturur.

15 Temel Bilgi 1.derece Türev İşlemi (First-order derivative-tek değişkenli) f f '( x) f ( x 1) f ( x) x 2.derece türev İşlemi (Second-order derivative - tek değişkenli) 2 f f ( x 1) f ( x 1) 2 f ( x) 2 x Birinci dereceden türevler, bir görüntüde genellikle kalın kenarlar üretir. İkinci dereceden türevler ince çizgiler, izole noktaları ve gürültü gibi ince ayrıntıları bulmak için uygundur. Ikinci dereceden türev rampa ve basamak(keskin)geçiş de bir çift kenar tepki oluşturur. ikinci türevin işareti aydınlık- karanlık veya karanlık-aydınlık bir kenar geçiş olup olmadığını belirlemek için kullanılabilir 15
geçiş de bir çift kenar tepki oluşturur.")
16 12/19/
17 İzole nokta belirlenmesi Bir görüntüdeki izole nokta tespiti aşağıdaki maske kullanarak yapılabilir. Belirlenen bu izole nokta maskenin merkezine karşılık gelen eleman değeridir. R= - (x1+x2+ x3+ x4+ x5+ x6+ x7+ x8+ x9)+8*x5 hesaplanır; IRI > T ise bu nokta (x5) bir izole noktadır. T burada bir eşik değeridir. (wk=xk, zk: maske elemanları) 9 1 if R( x, y) T R g( x, y) wkz 0 otherwise k 1 Yani x5 in gri seviye değeri komşu piksellerin gri seviye değerlerinden çok farklı ise bu nokta izole bir noktadır. k

18 İzole nokta maskesi nasıl oluşturulmuştur? 2 boyutlu bir dizinin x ve y yönündeki 2. türevlerinin toplamına Laplacian denir. Sayısal türev işlemine göre aşağıdaki eşitlik bize maskenin nasıl elde edildiğine dair fikir vermektedir. Aynı prensibe göre değişik maskeler verilmiştir.

19 Kenar Çıkarma (Belirleme)-Edge Detection Bir görüntüdeki kenar, aydınlatma veya yüzey yansımaları gibi bir görüntünün fiziksel görünüşünde oluşan önemli bir değişime karşı düşer ki bu değişim kendisini parlaklık, renk ve doku olarak gösterir. Burada kenar anlamında, sadece görüntü parlaklıklarındaki değişikliklerle ilgilenilecektir. Bu anlamda, bir görüntünün gri seviyelerinde ani değişikliklerin olduğu bölgelere kenar adı verilecektir. Görüntüye ilişkin kenarların belirlenmesi birçok durumda kullanışlıdır. Nesne tanıma problemi buna bir örnek olarak verilebilir. Nesne tanımada temel adım, bir görüntüyü farklı nesnelere karşı düşen farklı bölgelere bölmelemektir. Kenar belirleme işleminin kullanışlı olduğu diğer bir örnek, sadece görüntüye ilişkin kenarların kodlandığı düşük bit oranlarında görüntü kodlama uygulamasıdır. Kenar belirlemenin önemli uygulamalarından biriside, görüntü içerisindeki belirli nesnenelerin boyutunun doğru bir şekilde ölçülmesi işlemidir. Cisimlerin fiziksel özellikleri ile kenarları arasında doğrudan bir ilişki söz konusudur. Dolayısıyla görüntünün birçok fiziksel özelliği kenar bilgisinden ortaya çıkarılabilir. Dolayısıyla kenar belirleme konusu, görüntü analizindeki önemli konulardan birisidir.

20 Kenar belirleme yöntemleri Kenar belirleme yöntemlerine geçmeden önce bazı tanılamalar; Görüntüye ilişkin ilgilenilen bölgelerin kendi içerisinde yeterince homojen oldukları varsayılacak ve dolayısıyla iki bölge arasındaki geçiş sadece gri seviye süreksizliklerine dayalı olarak tanımlanabilecektir. İyi bir kenar belirleyici; Kenarları iyi bir biçimde sezebilmelidir, Kenarları doğru konumlarda belirleyebilmelidir, Bir kenar için tek bir kenar görüntüsü oluşturabilmeli yani yapay kenarlar üretmemelidir. Görüntü içerisinde gürültünün varlığı (gürültü yüksek frekanslı bileşenlerden oluştuğu için gürültü ile kenarları birbirinden ayırt etmek güçleşecektir), kenar belirleme ve konumlama ölçütleri arasındaki karşılıklı ilişki (tradeoff) ve kenarların çok ölçekli yapısı, kenar belirleme aşamasında karşılaşılabilecek önemli sorunlardır.

21 Türev almaya dayalı kenar belirleme yöntemleri Bir görüntü içerisindeki kenarları belirlemek için uygulanabilecek en verimli yöntemlerden birisi, ani gri seviye değişimlerini tespit etmektir. Bu amaç için birçok kenar belirleme yönteminin kullandığı temel yaklaşım, bölgesel türev hesabına dayanır. Bölgesel olarak, görüntünün 1.türevi kenar bölgelerinde en büyük değere sahip olur (local maximum). Görüntünün 2.türevi ise kenar bölgelerinde sıfır değerini üretir. Bölgesel olarak görüntüye ilişkin 1. ve 2. türevleri hesaplayarak elde edilen lokal maksimum ve sıfır geçiş noktaları ile, ilgili görüntü bölgesi için kenarlar belirlenmiş olur. Bu derste kenar belirleme için; 1.türevi kullanan gradient yöntemi ve 2.türevi kullanan laplasyen yöntemini inceleyeceğiz.
 Kenar belirleme yöntemleri Sayısal görüntüde uygun türev almak için sayısal türev tanımı aşağıdaki denklemlerdeki gibidir.")
22 Gradient (1.türeve dayalı) Kenar belirleme yöntemleri Sayısal görüntüde uygun türev almak için sayısal türev tanımı aşağıdaki denklemlerdeki gibidir. Eğer h ın alabileceği en küçük değer 1 olarak düşünülürse sayısal türev hesaplaması aşağıdaki gibi olur. Bu işlemler tek boyutlu işlemlerdir.
23 1.Türeve dayalı kenar belirleme -2 Görüntüler iki boyutlu olduğundan, biz kısmi sayısal türev kullanmalıyız. Buradan önemli bir tanımlamaya gradient bağıntısına geçebiliriz. Bir f(x,y) fonksiyonu için; gradiyent bağıntısı şeklinde değişen bir vektördür. Bu vektör, f(x,y) fonksiyonundaki noktalar için en büyük artış yönünü elde eder. Bu artışın yönü ve genliği aşağıdaki bağıntılardan hesap edilir. f (x,y) aynı zamanda kenarın yönünü ve büyüklüğünü kestirmede kullanılabilir. Eğer f (x,y) çok büyük ise, f(x,y) çok hızlı değişir ve bu durum parlaklıkta hızlı bir değişime karşı düşer. Eğer f (x,y) pozitif ise, f(x) artan bir fonksiyondur. Buradan hareketle birçok kenar belirleme algoritmasının temeli,, gradiyenin genliğinin bulunması ve onu bir eşik değerle karşılaştırmaya dayanır.
24
25
26 Şekildeki sisteme göre, ilk olarak f(x, y) nin gradienti olan f (x, y) fonksiyonunun genliği hesaplanır ve bu genlik, aday kenar noktalarını tanımlamak için bir eşik değeri ile karşılaştırılır. Eğer f (x, y) fonksiyonunun genliğinin belirli bir eşik değerinden büyük olduğu bütün (x, y) noktaları kenar noktası olarak tanımlanırsa, oluşan kenar görüntüsü ince çizgilerden ziyade kalın şeritler halinde görünecektir. Kalın şeritlerden ince çizgiler elde etmek için, kenar görüntüsü inceltme (thinning) işlemine tabi tutulur.
27 Gradient tabanlı kenar belirleme sistemleri iki değişik şekilde uygulanabilir. Bunlar, yönlü ve yönsüz kenar kestirimcileri (directional and nondirectional edge detectors) olarak adlandırılır. f (x, y) fonksiyonunu kullanan kenar belirleme sistemlerine yönsüz kenar kestirimcisi adı verilir ki bu sistem herhangi bir doğrultu için ayarlı değildir ve her yön için eşit ağırlıklı sonuçlar üretir. Eğer kenar belirleme sistemi herhangi bir yön için ayarlanmışsa bu sistemlere yönlü kenar kestirimcisi adı verilir. Örneğin, bir önce açıklanan kenar belirleme sisteminde f (x, y) fonksiyonu yerine sadece f (x, y) / x fonksiyonu kullanılırsa, bu durumda sistem sadece düşey yöndeki kenarları tanır ve yatay yöndeki kenarlara ise cevap vermez.
28 SOBEL Kenar detektörü Sobel kenar detektörü 1. kısmi türevlere dayanır. Aşağıdaki maskeyi kullanır. Başka bir değişle maske ortasına denk gelen pikselin gradienti komşularda gözönüne alınarak aşağıdaki gibi hesaplanır. Matlab fonksiyonu olarak; [g,t]=edge(f, sobel,t,dir) Burada f, giriş görüntüsü, T eşik değeri, dir, kenar dedektörünün tavsiye edeceği yön indeksidir. Horizontal, vertical veya both
29 SOBEL ALGORİTMASI
30 SOBEL ALGORİTMASI A=imread('peppers.png'); B=rgb2gray(A); C=double(B); for i=1:size(c,1)-2 for j=1:size(c,2)-2 %Sobel mask for x-direction: Gx=((2*C(i+2,j+1)+C(i+2,j)+C(i+2,j+2))- (2*C(i,j+1)+C(i,j)+C(i,j+2))); %Sobel mask for y-direction: Gy=((2*C(i+1,j+2)+C(i,j+2)+C(i+2,j+2))- (2*C(i+1,j)+C(i,j)+C(i+2,j))); %The gradient of the image %B(i,j)=abs(Gx)+abs(Gy); B(i,j)=sqrt(Gx.^2+Gy.^2); end end figure,imshow(b); title('sobel gradient');
31 Prewitt Kenar detektörü Prewitt dedektör Sobel dedektör göre hesaplama uygulamak için biraz daha basit, ama biraz noiser sonuçlar üretme eğilimindedir. Matlab fonksiyonu olarak Sobel in parametreleri ile aynıdır.
; >> imshow(s) >> s=edge(a,'sobel', 0.1, 'vertical'); >> imshow(s) >> s=edge(a,'sobel', 0.")
32 Sobel Örnek, T=0.1 >> a=imread('blocks.tiff'); >> imshow(a) >> s=edge(a,'sobel', 0.1); >> imshow(s) >> s=edge(a,'sobel', 0.1, 'vertical'); >> imshow(s) >> s=edge(a,'sobel', 0.1, 'horizontal'); >> imshow(s) >> s=edge(a,'sobel', 0.3);

 >>")
33 Prewitt örneği T=0.05 >> a=imread('lena_std.tif'); >> g = rgb2gray(a); >> imshow(g) >> s=edge(g,'prewitt', 0.05); >> imshow(s)
34 Prewitt örneği >> s=edge(g,'prewitt',0.05, 'horizontal'); >> imshow(s) >> s=edge(g,'prewitt',0.05, vertical'); >> imshow(s)
35 ÖDEV Prewit ve Robert kenar çıkarımlarını gerçekleştiren m-file dosyasını yazınız? Ödev Teslim Tarihi:

36 Roberts Kenar dedektörleri Roberts detektörü görüntü işlemede en eski ve en basit detektörlerdir. Bu detektör yalnız yatay veya düşey kenarları detekte edebilir. Hızlı ve basit olduğundan gerçek zamanlı uygulamalarda kullanılmaktadır. Matlab fonksiyonu aşağıdaki gibidir.
37 2.Türeve dayalı kenar belirleme (Laplasian yöntemi) Herhangi bir işarete ilişkin ani geçiş noktasının belirlenmesi için başvurulan yöntemlerden diğeri, fonksiyona ilişkin 2.türevi kullanır. İşarete ilişkin 1.türevin en büyük veya en küçük olduğu noktada işaretin 2.türevi sıfıra eşittir. Bu gerçeğe dayanarak, bir görüntü fonksiyonuna ilişkin 2.türev alınıp sıfır geçiş noktalarının tespit edilmesiyle görüntüye ilişkin kenar görüntüsüne ulaşmak mümkündür. 2-Boyutlu bir f(x, y) fonksiyonunun x ve y değişkenlerine göre 2.türevi, f(x, y) nin ayrık (Diskrate) laplasyeni olarak adlandırılır. 1.türeve göre önemli bir avantaja sahiptir. Bu da rotasyon altında değişmez olduğudur. Aşağıdaki ifadelerle verilir. Bu durum 3*3 lük bir filtre matrisle de ifade edilebilir.
38
39 Sonuç olarak, laplasyen kenar tanıma yönteminde, görüntü fonksiyonu f(x, y) yi verilen laplasyen kenar maskeleri ile konvolüsyona tabi tuttuktan sonra elde edilen laplasyen görüntüsünün mutlak değerinin bir eşik değeri ile karşılaştırılması sonucunda kenar görüntüsüne ulaşılır. Gradient tabanlı yöntemde de aynı işlemler yapılmasına rağmen laplasyen tabanlı olarak elde edilen kenar görüntüsünde bazı farklar vardır. Bu farklar aşağıdaki gibi sıralanabilir: Laplasyen hesabında ikinci dereceden türevler söz konusu olduğundan dolayı, gradientine nazaran bir görüntünün laplasyeni kabul edilemez derecede gürültüye duyarlı olacaktır. Görüntünün laplasyeninin mutlak değeri çift kenarların oluşmasına neden olacaktır ki bu durumda kenar yönünün belirlenmesi mümkün olmayacaktır. Bu durum, bir pikselin, kenarın koyu bölgesinde mi yoksa açık bölgesinde mi olduğunu saptamada zorluk teşkil edecektir. Sıfır geçişleri, görüntü içerisindeki cisimlere ilişkin sınırları temsil ettiği için kenar görüntüsü sürekli çizgiler halinde olacaktır. Bundan dolayı, gradient-tabanlı yöntemlerde gerekli olan kenar inceltme işlemine laplasyen-tabanlı yöntemlerde ihtiyaç duyulmaz. Görüntü içerisindeki en küçük ani değişimler bile bir sıfır geçişi oluşturacakları için, laplasyen-tabanlı yöntem ile elde edilen kenar görüntülerinde çok fazla sayıda yanlış kenar noktalarının oluşması kaçınılmazdır.
40 Buna göre, bir görüntünün kenarlarını elde etmek için gerçekleştirilecek laplasyentabanlı kenar belirleme algoritması aşağıdaki aşamalardan oluşacaktır: 1. Gri-ton görüntünün laplasyenini elde etmek için, görüntü fonksiyonu f(x, y) laplasyen maskesi ile konvolüsyona tabi tutulur. 2. Süzgeçlenmiş görüntüdeki (Laplasyen görüntüsü) tüm sıfır geçiş noktaları (zerocrossing points) elde edilir. Genel olarak laplasyen görüntüsünde sıfır geçiş noktasına karşı düşen pikseller tam olarak sıfıra eşit olmayabilir. Bu durumda, ilgilenilen pikselin bir sıfır geçiş noktasına karşı düşüp düşmediğini belirlemek için komşuluktaki piksel değerlerine bakılır ve {-,+} veya {+,-} şeklinde işaret değişimlerinin olup olmadığı belirlenir. Eğer ki işaret değişimi varsa, sıfır geçişin eğimi (piksel değerlerinin farkının mutlak değeri) bir eşik değeri ile karşılaştırılır. Eşik değerinden büyük olan eğimler kenar noktası olarak belirlenir. Genellikle eşik değeri, laplasyen görüntüsünün mutlak değerinin ortalamasının %75 i alınarak belirlenmektedir.

41 Sıfır geçiş belirlemeye örnek Laplasian filtresinden geçirilmiş görüntü matrisinde; aşağıdaki özelliklerden birini sağlayan piksel sıfır geçiş pikselidir ve dolayısıyla kenar üzerinde bir noktadır. 1- Negatif bir gri değerine sahip olmalı ve bağlantılı komşu piksellerinden en az birisinin gri değeri pozitif olmalı. 2- Pikselin değeri sıfır ise, onun yatay veya dikey komşu piksellerinin değeri farklı işaretlerde olmalı.
42 Laplasian yönteminde, görüntüdeki en küçük gri seviyelerdeki değişimlerde bile sıfır geçiş noktası üretebileceği ve Görüntünün küçük seviyelerde de olsa gürültü ile etkilenmiş olduğu göz önüne alınırsa, laplasyen-tabanlı yöntemlerin doğrudan doğruya görüntü üzerine uygulanması pek sık kullanılan bir yol değildir. Bu durum aşağıdaki şekillerden de görülmektedir. >> a=imread('cameraman.tif'); >> imshow(a) >> a=imread('cameraman.tif'); >> l=fspecial('laplacian',1); >> icz=edge(a,'zerocross',l); >> imshow(icz)
43 Dolayısıyla, laplasian metodunun doğrudan kullanımı yerine, daha genel olan Laplasyen-Gauss (LoG) yöntemi kullanılır. İlk olarak Marr-Hildreth tarafından önerildiğinden dolayı, bu yönteme aynı zamanda Marr-Hildreth kenar belirleme yöntemi adı da verilir. Marr-Hildreth, görüntüyü değişik kesim frekansları ile sınırlandırdıktan sonra her bir sınırlandırılmış görüntü üzerine kenar tanıma işlemleri uygulayarak değişik kenar görüntüleri elde etmeyi hedeflemişlerdir. LoG yönteminde, görüntüyü değişik kesim frekanslarında sınırlandırmak için Gaussian alçak geçiren süzgeç kullanılmaktadır ( Bu şekilde görüntü geçişleri yumuşaklaştırılır). Görüntünün doğrudan laplasyeninin alınması gürültüyü daha da kuvvetlendireceği için arzu edilmeyen birçok yapay kenar noktasının elde edilmesi olasıdır. LoG yöntemi ile doğrudan doğruya görüntünün laplasyenini almaktansa görüntünün bir Gaussian fonksiyonu ile konvolüsyona tabi tutup daha sonra laplasyenini hesaplamak daha mantıklı bir yol olarak görünmektedir. Bu yöntemin MATLAB da uygulaması ise;
44 Laplasian of Gaussian (log) >>a=imread('cameraman.tif'); >> l=fspecial('laplacian',1); >> icz=edge(a,'zerocross',l); >> imshow(icz) > log=fspecial('log',13,2); >> icz=edge(a,'zerocross',log); >> imshow(icz)
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 6 Kenar, Köşe, Yuvarlak Tespiti Alp Ertürk [email protected] KENAR TESPİTİ Kenar Tespiti Amaç: Görüntüdeki ani değişimleri / kesintileri algılamak Şekil bilgisi elde
Bilgisayarla Görüye Giriş Ders 6 Kenar, Köşe, Yuvarlak Tespiti Alp Ertürk [email protected] KENAR TESPİTİ Kenar Tespiti Amaç: Görüntüdeki ani değişimleri / kesintileri algılamak Şekil bilgisi elde
MOD419 Görüntü İşleme
 MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
Görüntü İşleme. K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI. Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003
 Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME
 GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME DERS İÇERİĞİ Histogram İşleme Filtreleme Temelleri HİSTOGRAM Histogram bir resimdeki renk değerlerinin sayısını gösteren grafiktir. Histogram dengeleme
GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME DERS İÇERİĞİ Histogram İşleme Filtreleme Temelleri HİSTOGRAM Histogram bir resimdeki renk değerlerinin sayısını gösteren grafiktir. Histogram dengeleme
Görüntü İşleme. Dijital Görüntü Tanımları. Dijital görüntü ise sayısal değerlerden oluşur.
 Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Görüntü Segmentasyonu (Bölütleme)
") Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 20 Aralık 2014 Cumartesi 1 Görüntü Segmentasyonu 20 Aralık 2014 Cumartesi 2 Gestalt kanunları Görüntü
Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 20 Aralık 2014 Cumartesi 1 Görüntü Segmentasyonu 20 Aralık 2014 Cumartesi 2 Gestalt kanunları Görüntü
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Final
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
Görüntü İşleme Dersi Ders-8 Notları
 Görüntü İşleme Dersi Ders-8 Notları GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
Görüntü İşleme Dersi Ders-8 Notları GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ
 GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
Görüntü Segmentasyonu (Bölütleme) Dijital Görüntü İşleme Fevzi Karslı, KTÜ Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır.
 Dijital Görüntü İşleme Fevzi Karslı, KTÜ Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır.") Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 16 Ocak 2014 Perşembe 1 Görüntü Segmentasyonu 16 Ocak 2014 Perşembe 2 Görüntüden Objelere Bir objeyi
Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 16 Ocak 2014 Perşembe 1 Görüntü Segmentasyonu 16 Ocak 2014 Perşembe 2 Görüntüden Objelere Bir objeyi
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Uzaysal Görüntü İyileştirme/Filtreleme. Doç. Dr. Fevzi Karslı [email protected]
 Uasal Görüntü İileştirme/Filtreleme Doç. Dr. Fevi Karslı [email protected] İileştirme Herhangi bir ugulama için, görüntüü orijinalden daha ugun hale getirmek Ugunluğu her bir ugulama için sağlamak. Bir
Uasal Görüntü İileştirme/Filtreleme Doç. Dr. Fevi Karslı [email protected] İileştirme Herhangi bir ugulama için, görüntüü orijinalden daha ugun hale getirmek Ugunluğu her bir ugulama için sağlamak. Bir
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI
 KENAR BELİRLEME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
AMAÇ Araçlardaki Kamera Sistemleri
 SUNU PLANI AMAÇ OPEN CV GÖRÜNTÜ EŞİKLEME KENAR BULMA ŞEKİL BULMA GÖRÜNTÜ GENİŞLETME VE BOZMA GÖRÜNTÜ DOLDURMA AFFİNE DÖNÜŞÜMÜ PERSPEKTİF DÖNÜŞÜM KUŞ BAKIŞI GÖRÜNTÜ DÖNÜŞÜMÜ AMAÇ Araçlardaki Kamera Sistemleri
SUNU PLANI AMAÇ OPEN CV GÖRÜNTÜ EŞİKLEME KENAR BULMA ŞEKİL BULMA GÖRÜNTÜ GENİŞLETME VE BOZMA GÖRÜNTÜ DOLDURMA AFFİNE DÖNÜŞÜMÜ PERSPEKTİF DÖNÜŞÜM KUŞ BAKIŞI GÖRÜNTÜ DÖNÜŞÜMÜ AMAÇ Araçlardaki Kamera Sistemleri
TMMOB Harita ve Kadastro Mühendisleri Odası Ulusal Coğrafi Bilgi Sistemleri Kongresi 30 Ekim 02 Kasım 2007, KTÜ, Trabzon
 TMMOB Harita ve Kadastro Mühendisleri Odası Ulusal Coğrafi Bilgi Sistemleri Kongresi 30 Ekim 02 Kasım 2007, KTÜ, Trabzon Lazer Tarama Verilerinden Bina Detaylarının Çıkarılması ve CBS İle Entegrasyonu
TMMOB Harita ve Kadastro Mühendisleri Odası Ulusal Coğrafi Bilgi Sistemleri Kongresi 30 Ekim 02 Kasım 2007, KTÜ, Trabzon Lazer Tarama Verilerinden Bina Detaylarının Çıkarılması ve CBS İle Entegrasyonu
Hafta 5 Uzamsal Filtreleme
 BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk [email protected] Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk [email protected] Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Vize. İris Segmentation. Selçuk BAŞAK 08501008
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Vize İris Segmentation Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim program ve kaynak
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Vize İris Segmentation Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim program ve kaynak
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 7 SIFT ve Öznitelik Eşleme Alp Ertürk [email protected] Panorama Oluşturma Görüntü mozaikleme, panorama oluşturma gibi tüm uygulamalar için öncelikle ilgili görüntülerin
Bilgisayarla Görüye Giriş Ders 7 SIFT ve Öznitelik Eşleme Alp Ertürk [email protected] Panorama Oluşturma Görüntü mozaikleme, panorama oluşturma gibi tüm uygulamalar için öncelikle ilgili görüntülerin
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
Frekans domain inde İşlemler. BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN
 Frekans domain inde İşlemler BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise,
Frekans domain inde İşlemler BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise,
METASEZGİSEL YÖNTEMLER
 METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ. Haftalık Ders Planı
 Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
AKÜ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 GÖRÜNTÜ İŞLEME DERS-8 YARDIMCI NOTLARI -2018 Gri Seviye Dönüşümleri Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
GÖRÜNTÜ İŞLEME DERS-8 YARDIMCI NOTLARI -2018 Gri Seviye Dönüşümleri Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ
 GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
OPTİMİZASYON TEKNİKLERİ. Kısıtsız Optimizasyon
 OPTİMİZASYON TEKNİKLERİ Kısıtsız Optimizasyon Giriş Klasik optimizasyon yöntemleri minimum veya maksimum değerlerini bulmak için türev gerektiren ve gerektirmeyen teknikler olarak bilinirler. Bu yöntemler
OPTİMİZASYON TEKNİKLERİ Kısıtsız Optimizasyon Giriş Klasik optimizasyon yöntemleri minimum veya maksimum değerlerini bulmak için türev gerektiren ve gerektirmeyen teknikler olarak bilinirler. Bu yöntemler
Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme
 BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
Tek Değişkenli Optimizasyon OPTİMİZASYON. Gradient Tabanlı Yöntemler. Bisection (İkiye Bölme) Yöntemi
 Yöntemi") OPTİMİZASYON Gerçek hayatta, çok değişkenli optimizasyon problemleri karmaşıktır ve nadir olarak problem tek değişkenli olur. Bununla birlikte, tek değişkenli optimizasyon algoritmaları çok değişkenli
OPTİMİZASYON Gerçek hayatta, çok değişkenli optimizasyon problemleri karmaşıktır ve nadir olarak problem tek değişkenli olur. Bununla birlikte, tek değişkenli optimizasyon algoritmaları çok değişkenli
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Kümeler arası. Küme içi. uzaklıklar. maksimize edilir. minimize edilir
 Kümeleme Analizi: Temel Kavramlar ve Algoritmalar Kümeleme Analizi Nedir? Her biri bir dizi öznitelik ile, veri noktalarının bir kümesi ve noktalar arasındaki benzerliği ölçen bir benzerlik ölçümü verilmiş
Kümeleme Analizi: Temel Kavramlar ve Algoritmalar Kümeleme Analizi Nedir? Her biri bir dizi öznitelik ile, veri noktalarının bir kümesi ve noktalar arasındaki benzerliği ölçen bir benzerlik ölçümü verilmiş
Kısıtsız Optimizasyon OPTİMİZASYON Kısıtsız Optimizasyon
 OPTİMİZASYON Bu bölümde çok değişkenli kısıtsız optimizasyon problemlerinin çözüm yöntemleri incelenecektir. Bu bölümde anlatılacak yöntemler, kısıtlı optimizasyon problemlerini de çözebilmektedir. Bunun
OPTİMİZASYON Bu bölümde çok değişkenli kısıtsız optimizasyon problemlerinin çözüm yöntemleri incelenecektir. Bu bölümde anlatılacak yöntemler, kısıtlı optimizasyon problemlerini de çözebilmektedir. Bunun
İkili (Binary) Görüntü Analizi
 Görüntü Analizi") İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA
 UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında ucuz ve hızlı sonuç alınabilen uzaktan algılama tekniğinin, yenilenebilir
UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında ucuz ve hızlı sonuç alınabilen uzaktan algılama tekniğinin, yenilenebilir
Hızlı Düzey Küme Yöntemine Bağlı Retinal Damar Bölütlemesi. Bekir DİZDAROĞLU. KTÜ Bilgisayar Mühendisliği Bölümü
 Bekir DİZDAROĞLU KTÜ Bilgisayar Mühendisliği Bölümü [email protected] 1/29 Tıbbi imge bölütleme klasik yaklaşımları a) Piksek tabanlı b) Kenar tabanlı c) Bölge tabanlı d) Watershed (sınır) tabanlı e) Kenar
Bekir DİZDAROĞLU KTÜ Bilgisayar Mühendisliği Bölümü [email protected] 1/29 Tıbbi imge bölütleme klasik yaklaşımları a) Piksek tabanlı b) Kenar tabanlı c) Bölge tabanlı d) Watershed (sınır) tabanlı e) Kenar
Algoritma Geliştirme ve Veri Yapıları 9 Ağaç Veri Modeli ve Uygulaması. Mustafa Kemal Üniversitesi
 Algoritma Geliştirme ve Veri Yapıları 9 Ağaç Veri Modeli ve Uygulaması Ağaç, verilerin birbirine sanki bir ağaç yapısı oluşturuyormuş gibi sanal olarak bağlanmasıyla elde edilen hiyararşik yapıya sahip
Algoritma Geliştirme ve Veri Yapıları 9 Ağaç Veri Modeli ve Uygulaması Ağaç, verilerin birbirine sanki bir ağaç yapısı oluşturuyormuş gibi sanal olarak bağlanmasıyla elde edilen hiyararşik yapıya sahip
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
İstatistik ve Olasılık
 İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
Sıklık Tabloları, BASİT ve TEK değişkenli Grafikler Ders 3 ve 4 ve 5
 Sıklık Tabloları, BASİT ve TEK değişkenli Grafikler Ders 3 ve 4 ve 5 Sıklık Tabloları Veri dizisinde yer alan değerlerin tekrarlama sayılarını içeren tabloya sıklık tablosu denir. Tek değişken için çizilen
Sıklık Tabloları, BASİT ve TEK değişkenli Grafikler Ders 3 ve 4 ve 5 Sıklık Tabloları Veri dizisinde yer alan değerlerin tekrarlama sayılarını içeren tabloya sıklık tablosu denir. Tek değişken için çizilen
Analitik Hiyerarşi Prosesi (AHP) Yrd.Doç.Dr. Sabahattin Kerem AYTULUN
 Yrd.Doç.Dr. Sabahattin Kerem AYTULUN") Analitik Hiyerarşi Prosesi (AHP) Yrd.Doç.Dr. Sabahattin Kerem AYTULUN Giriş AHP Thomas L.Saaty tarafından 1970'lerde ortaya atılmıştır. Amaç alternatifler arasından en iyisinin seçilmesidir. Subjektif
Analitik Hiyerarşi Prosesi (AHP) Yrd.Doç.Dr. Sabahattin Kerem AYTULUN Giriş AHP Thomas L.Saaty tarafından 1970'lerde ortaya atılmıştır. Amaç alternatifler arasından en iyisinin seçilmesidir. Subjektif
ELN1001 BİLGİSAYAR PROGRAMLAMA I
 ELN1001 BİLGİSAYAR PROGRAMLAMA I DEPOLAMA SINIFLARI DEĞİŞKEN MENZİLLERİ YİNELEMELİ FONKSİYONLAR Depolama Sınıfları Tanıtıcılar için şu ana kadar görülmüş olan özellikler: Ad Tip Boyut Değer Bunlara ilave
ELN1001 BİLGİSAYAR PROGRAMLAMA I DEPOLAMA SINIFLARI DEĞİŞKEN MENZİLLERİ YİNELEMELİ FONKSİYONLAR Depolama Sınıfları Tanıtıcılar için şu ana kadar görülmüş olan özellikler: Ad Tip Boyut Değer Bunlara ilave
Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar
 BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
DOĞRUSAL OLMAYAN PROGRAMLAMA -I-
 DOĞRUSAL OLMAYAN PROGRAMLAMA -I- Dışbükeylik / İçbükeylik Hazırlayan Doç. Dr. Nil ARAS Anadolu Üniversitesi, Endüstri Mühendisliği Bölümü İST38 Yöneylem Araştırması Dersi 0-0 Öğretim Yılı Doğrusal olmayan
DOĞRUSAL OLMAYAN PROGRAMLAMA -I- Dışbükeylik / İçbükeylik Hazırlayan Doç. Dr. Nil ARAS Anadolu Üniversitesi, Endüstri Mühendisliği Bölümü İST38 Yöneylem Araştırması Dersi 0-0 Öğretim Yılı Doğrusal olmayan
İkili (Binary) Görüntü Analizi
 Görüntü Analizi") İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
Gri Seviye Dönüşümleri ve Uzaysal Filtreleme. BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN
 Gri Seviye Dönüşümleri ve Uzaysal Filtreleme BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini
Gri Seviye Dönüşümleri ve Uzaysal Filtreleme BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini
Horn ve Schunck Optik Akış yöntemi ile hareket vektörlerinin gerçek zamanlı veya videolar üzerinden gerçeklenmesi.(matlab)
") Horn ve Schunck Optik Akış yöntemi ile hareket vektörlerinin gerçek zamanlı veya videolar üzerinden gerçeklenmesi.(matlab) Dersin Adı: Say.İşaret İşleme Tas.&Uyg. Sınıf Eğitmeni: Bilge Günsel Kalyoncu
Horn ve Schunck Optik Akış yöntemi ile hareket vektörlerinin gerçek zamanlı veya videolar üzerinden gerçeklenmesi.(matlab) Dersin Adı: Say.İşaret İşleme Tas.&Uyg. Sınıf Eğitmeni: Bilge Günsel Kalyoncu
Örnek 4.1: Tablo 2 de verilen ham verilerin aritmetik ortalamasını hesaplayınız.
 .4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
.4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
Şekil 7.1 Bir tankta sıvı birikimi
 6 7. DİFERENSİYEL DENKLEMLERİN SAYISAL ÇÖZÜMLERİ Diferensiyel denklemlerin sayısal integrasyonunda kullanılabilecek bir çok yöntem vardır. Tecrübeler dördüncü mertebe (Runge-Kutta) yönteminin hemen hemen
6 7. DİFERENSİYEL DENKLEMLERİN SAYISAL ÇÖZÜMLERİ Diferensiyel denklemlerin sayısal integrasyonunda kullanılabilecek bir çok yöntem vardır. Tecrübeler dördüncü mertebe (Runge-Kutta) yönteminin hemen hemen
Sayı sistemleri-hesaplamalar. Sakarya Üniversitesi
 Sayı sistemleri-hesaplamalar Sakarya Üniversitesi Sayı Sistemleri - Hesaplamalar Tüm sayı sistemlerinde sayılarda işaret kullanılabilir. Yani pozitif ve negatif sayılarla hesaplama yapılabilir. Bu gerçek
Sayı sistemleri-hesaplamalar Sakarya Üniversitesi Sayı Sistemleri - Hesaplamalar Tüm sayı sistemlerinde sayılarda işaret kullanılabilir. Yani pozitif ve negatif sayılarla hesaplama yapılabilir. Bu gerçek
Değişkenler. Geçerli değişken isimleri : baslamazamani, ad_soyad, x5 Geçersiz değişken isimleri : 3x, while
 Değişkenler Değişkenler bir bilginin bellekteki konumunu temsil eden sembolik isimlerdir. Bilgisayarda hemen hemen tüm işlemler bellekte yapılır. Program çalıştırıldığında değişken ve bu değişkenin türüne
Değişkenler Değişkenler bir bilginin bellekteki konumunu temsil eden sembolik isimlerdir. Bilgisayarda hemen hemen tüm işlemler bellekte yapılır. Program çalıştırıldığında değişken ve bu değişkenin türüne
TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun.
 Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
Görüntü İşleme Ders-7 AND, NAND. % bir görüntüde küçük bir alanın kesilip çıkartılması. >> y=imread('headquarters-2and.jpg');
;") Görüntü İşleme Ders-7 AND, NAND % bir görüntüde küçük bir alanın kesilip çıkartılması. >> x=imread('headquarters-2.jpg'); >> y=imread('headquarters-2and.jpg'); >> x=rgb2gray(x); >> y=rgb2gray(y); >> imshow(y)
Görüntü İşleme Ders-7 AND, NAND % bir görüntüde küçük bir alanın kesilip çıkartılması. >> x=imread('headquarters-2.jpg'); >> y=imread('headquarters-2and.jpg'); >> x=rgb2gray(x); >> y=rgb2gray(y); >> imshow(y)
Matlab da Dizi ve Matrisler. Mustafa Coşar
 Matlab da Dizi ve Matrisler Mustafa Coşar MATLAB Değişkenleri Matlab da değişkenler; skaler, dizi(vektör), matris veya metin (string) türünde olabilirler. Örnek olarak: a=1; b=-3.2e3; c=22/5; metin= mustafa
Matlab da Dizi ve Matrisler Mustafa Coşar MATLAB Değişkenleri Matlab da değişkenler; skaler, dizi(vektör), matris veya metin (string) türünde olabilirler. Örnek olarak: a=1; b=-3.2e3; c=22/5; metin= mustafa
3.2. DP Modellerinin Simpleks Yöntem ile Çözümü Primal Simpleks Yöntem
 3.2. DP Modellerinin Simpleks Yöntem ile Çözümü 3.2.1. Primal Simpleks Yöntem Grafik çözüm yönteminde gördüğümüz gibi optimal çözüm noktası, her zaman uygun çözüm alanının bir köşe noktası ya da uç noktası
3.2. DP Modellerinin Simpleks Yöntem ile Çözümü 3.2.1. Primal Simpleks Yöntem Grafik çözüm yönteminde gördüğümüz gibi optimal çözüm noktası, her zaman uygun çözüm alanının bir köşe noktası ya da uç noktası
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 10 Nesne / Yüz Tespiti ve Tanıma Alp Ertürk [email protected] Nesne Tespiti Belirli bir nesnenin sahne içindeki konumunun tespitidir Tespit edilecek nesne önceden
Bilgisayarla Görüye Giriş Ders 10 Nesne / Yüz Tespiti ve Tanıma Alp Ertürk [email protected] Nesne Tespiti Belirli bir nesnenin sahne içindeki konumunun tespitidir Tespit edilecek nesne önceden
Web Madenciliği (Web Mining)
") Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimsiz Öğrenmenin Temelleri Kümeleme Uzaklık Fonksiyonları Öklid Uzaklığı Manhattan
Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimsiz Öğrenmenin Temelleri Kümeleme Uzaklık Fonksiyonları Öklid Uzaklığı Manhattan
YOĞUN GÖRÜNTÜ EŞLEME ALGORİTMALARI İLE ÜRETİLEN YÜKSEK ÇÖZÜNÜRLÜKLÜ SAYISAL YÜZEY MODELİ ÜRETİMİNDE KALİTE DEĞERLENDİRME VE DOĞRULUK ANALİZİ
 YOĞUN GÖRÜNTÜ EŞLEME ALGORİTMALARI İLE ÜRETİLEN YÜKSEK ÇÖZÜNÜRLÜKLÜ SAYISAL YÜZEY MODELİ ÜRETİMİNDE KALİTE DEĞERLENDİRME VE DOĞRULUK ANALİZİ Naci YASTIKLI a, Hüseyin BAYRAKTAR b a Yıldız Teknik Üniversitesi,
YOĞUN GÖRÜNTÜ EŞLEME ALGORİTMALARI İLE ÜRETİLEN YÜKSEK ÇÖZÜNÜRLÜKLÜ SAYISAL YÜZEY MODELİ ÜRETİMİNDE KALİTE DEĞERLENDİRME VE DOĞRULUK ANALİZİ Naci YASTIKLI a, Hüseyin BAYRAKTAR b a Yıldız Teknik Üniversitesi,
SPSS E GİRİŞ SPSS TE TEMEL İŞLEMLER. Abdullah Can
 SPSS E GİRİŞ SPSS TE TEMEL İŞLEMLER SPSS in üzerinde işlem yapılabilecek iki ana ekran görünümü vardır. DATA VIEW (VERİ görünümü) VARIABLE VIEW (DEĞİŞKEN görünümü) 1 DATA VIEW (VERİ görünümü) İstatistiksel
SPSS E GİRİŞ SPSS TE TEMEL İŞLEMLER SPSS in üzerinde işlem yapılabilecek iki ana ekran görünümü vardır. DATA VIEW (VERİ görünümü) VARIABLE VIEW (DEĞİŞKEN görünümü) 1 DATA VIEW (VERİ görünümü) İstatistiksel
Rasgele Sayı Üretme. Rasgele Sayıların Özellikleri. İki önemli istaiksel özelliği var :
 Rasgele Sayı Üretme Rasgele Sayıların Özellikleri İki önemli istaiksel özelliği var : Düzgünlük (Uniformity) Bağımsızlık R i, rasgele sayısı olasılık yoğunluk fonksiyonu aşağıdaki gibi olan uniform bir
Rasgele Sayı Üretme Rasgele Sayıların Özellikleri İki önemli istaiksel özelliği var : Düzgünlük (Uniformity) Bağımsızlık R i, rasgele sayısı olasılık yoğunluk fonksiyonu aşağıdaki gibi olan uniform bir
Yrd. Doç. Dr. Caner ÖZCAN
 Yrd. Doç. Dr. Caner ÖZCAN Grafik Programlama Bilgisayar kullanılırken monitörlerde iki tür ekran moduyla karşılaşılır. Bu ekran modları Text modu ve Grafik modu dur. Text modunda ekran 25 satır ve 80 sütundan
Yrd. Doç. Dr. Caner ÖZCAN Grafik Programlama Bilgisayar kullanılırken monitörlerde iki tür ekran moduyla karşılaşılır. Bu ekran modları Text modu ve Grafik modu dur. Text modunda ekran 25 satır ve 80 sütundan
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
VEKTÖRLER. 1. Skaler Büyüklükler
 VEKTÖRLER Fizikte bazı büyüklükler sayılarla ifade edilebildiği halde, bazılarının ifade edilebilmesinde sayılar yeterli olmamaktadır. Sayılarla birlikte yönün de belirtilmesi gerekir. Bu nedenle fizikte
VEKTÖRLER Fizikte bazı büyüklükler sayılarla ifade edilebildiği halde, bazılarının ifade edilebilmesinde sayılar yeterli olmamaktadır. Sayılarla birlikte yönün de belirtilmesi gerekir. Bu nedenle fizikte
EEM 740 Sayısal Görüntü İşleme
 Pamukkale Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü Haberleşme Mühendisliği Anabilim Dalı EEM 740 Sayısal Görüntü İşleme Yrd. Doç. Dr. Aydın Kızılkaya 2007-2008 Bahar Yarı Yılı Müh. Fak. Binası
Pamukkale Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü Haberleşme Mühendisliği Anabilim Dalı EEM 740 Sayısal Görüntü İşleme Yrd. Doç. Dr. Aydın Kızılkaya 2007-2008 Bahar Yarı Yılı Müh. Fak. Binası
BİLGİSAYAR PROGRAMLAMA Araş. Gör. Ahmet ARDAHANLI. Kafkas Üniversitesi Mühendislik Fakültesi
 BİLGİSAYAR PROGRAMLAMA Araş. Gör. Ahmet ARDAHANLI Kafkas Üniversitesi Mühendislik Fakültesi Bu hafta? İki değişken değerinin yer değiştirilmesi (swapping) selection sort sıralama algoritması bubble sort
BİLGİSAYAR PROGRAMLAMA Araş. Gör. Ahmet ARDAHANLI Kafkas Üniversitesi Mühendislik Fakültesi Bu hafta? İki değişken değerinin yer değiştirilmesi (swapping) selection sort sıralama algoritması bubble sort
YAVAŞ DEĞİŞEN ÜNİFORM OLMAYAN AKIM
 YAVAŞ DEĞİŞEN ÜNİFORM OLMAYAN AKIM Yavaş değişen akımların analizinde kullanılacak genel denklem bir kanal kesitindeki toplam enerji yüksekliği: H = V g + h + z x e göre türevi alınırsa: dh d V = dx dx
YAVAŞ DEĞİŞEN ÜNİFORM OLMAYAN AKIM Yavaş değişen akımların analizinde kullanılacak genel denklem bir kanal kesitindeki toplam enerji yüksekliği: H = V g + h + z x e göre türevi alınırsa: dh d V = dx dx
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
Bu bölümde; Çok ölçütlü karar verme yöntemlerinden biri olan TOPSİS yöntemi anlatılacaktır.
 ÇOK ÖLÇÜTLÜ KARAR VERME TOPSIS (Technique For Order Preference By Similarity To Ideal Solution) PROF. DR. İBRAHİM ÇİL 1 Bu bölümde; Çok ölçütlü karar verme yöntemlerinden biri olan TOPSİS yöntemi anlatılacaktır.
ÇOK ÖLÇÜTLÜ KARAR VERME TOPSIS (Technique For Order Preference By Similarity To Ideal Solution) PROF. DR. İBRAHİM ÇİL 1 Bu bölümde; Çok ölçütlü karar verme yöntemlerinden biri olan TOPSİS yöntemi anlatılacaktır.
Uzaktan Algılama Uygulamaları
 Aksaray Üniversitesi Uzaktan Algılama Uygulamaları Doç.Dr. Semih EKERCİN Harita Mühendisliği Bölümü [email protected] 2010-2011 Bahar Yarıyılı Uzaktan Algılama Uygulamaları GÖRÜNTÜ İŞLEME TEKNİKLERİ
Aksaray Üniversitesi Uzaktan Algılama Uygulamaları Doç.Dr. Semih EKERCİN Harita Mühendisliği Bölümü [email protected] 2010-2011 Bahar Yarıyılı Uzaktan Algılama Uygulamaları GÖRÜNTÜ İŞLEME TEKNİKLERİ
GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI
 GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI NETLEŞTİRME/KESKİNLEŞTİRME FİLTRESİ (Sharpening Filter) Bu algoritma orjinal görüntüden, görüntünü yumuşatılmış halini çıkararak belirgin kenarların
GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI NETLEŞTİRME/KESKİNLEŞTİRME FİLTRESİ (Sharpening Filter) Bu algoritma orjinal görüntüden, görüntünü yumuşatılmış halini çıkararak belirgin kenarların
Altın Oran Arama Metodu(Golden Search)
") Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
GÖRÜNTÜ İŞLEME UYGULAMALARI. Arş. Gör. Dr. Nergis TURAL POLAT
 GÖRÜNTÜ İŞLEME UYGULAMALARI Arş. Gör. Dr. Nergis TURAL POLAT İçerik Görüntü işleme nedir, amacı nedir, kullanım alanları nelerdir? Temel kavramlar Uzaysal frekanslar Örnekleme (Sampling) Aynalama (Aliasing)
GÖRÜNTÜ İŞLEME UYGULAMALARI Arş. Gör. Dr. Nergis TURAL POLAT İçerik Görüntü işleme nedir, amacı nedir, kullanım alanları nelerdir? Temel kavramlar Uzaysal frekanslar Örnekleme (Sampling) Aynalama (Aliasing)
Bilgisayarla Fotogrametrik Görme
 Bilgisayarla Fotogrametrik Görme Dijital Görüntü ve Özellikleri Yrd. Doç. Dr. Mustafa DİHKAN 1 Dijital görüntü ve özellikleri Siyah-beyaz resimler için değer elemanları 0-255 arasındadır. 256 farklı durum
Bilgisayarla Fotogrametrik Görme Dijital Görüntü ve Özellikleri Yrd. Doç. Dr. Mustafa DİHKAN 1 Dijital görüntü ve özellikleri Siyah-beyaz resimler için değer elemanları 0-255 arasındadır. 256 farklı durum
Yrd. Doç. Dr. Saygın ABDİKAN Öğretim Yılı Bahar Dönemi
 Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
Doç. Dr. Bilge DORAN
 Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
Genel olarak test istatistikleri. Merkezi Eğilim (Yığılma) Ölçüleri Merkezi Dağılım (Yayılma) Ölçüleri. olmak üzere 2 grupta incelenebilir.
 Ölçüleri Merkezi Dağılım (Yayılma) Ölçüleri. olmak üzere 2 grupta incelenebilir.") 3.SUNUM Genel olarak test istatistikleri Merkezi Eğilim (Yığılma) Ölçüleri Merkezi Dağılım (Yayılma) Ölçüleri olmak üzere 2 grupta incelenebilir. 2 Merkezi Eğilim Ölçüleri, belli bir özelliğe ya da değişkene
3.SUNUM Genel olarak test istatistikleri Merkezi Eğilim (Yığılma) Ölçüleri Merkezi Dağılım (Yayılma) Ölçüleri olmak üzere 2 grupta incelenebilir. 2 Merkezi Eğilim Ölçüleri, belli bir özelliğe ya da değişkene
8.Konu Vektör uzayları, Alt Uzaylar
 8.Konu Vektör uzayları, Alt Uzaylar 8.1. Düzlemde vektörler Düzlemdeki her noktası ile reel sayılardan oluşan ikilisini eşleştirebiliriz. Buna P noktanın koordinatları denir. y-ekseni P x y O dan P ye
8.Konu Vektör uzayları, Alt Uzaylar 8.1. Düzlemde vektörler Düzlemdeki her noktası ile reel sayılardan oluşan ikilisini eşleştirebiliriz. Buna P noktanın koordinatları denir. y-ekseni P x y O dan P ye
Kan Damarı Genişliği Değişiminin Ölçülmesinde Medikal Görüntü İşlemenin Uygulanması
 Kan Damarı Genişliği Değişiminin Ölçülmesinde Medikal Görüntü İşlemenin Uygulanması Öğr. Gör. İsmail KAHRAMAN, Uzm. Vildan BAYRAM, Prof.Dr. Ertuğrul Ercan, Doç.Dr. Bahadır Kırılmaz Çanakkale 18 Mart Üniversitesi
Kan Damarı Genişliği Değişiminin Ölçülmesinde Medikal Görüntü İşlemenin Uygulanması Öğr. Gör. İsmail KAHRAMAN, Uzm. Vildan BAYRAM, Prof.Dr. Ertuğrul Ercan, Doç.Dr. Bahadır Kırılmaz Çanakkale 18 Mart Üniversitesi
Bilgisayar ne elde eder (görüntüden)? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51
? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51") Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Bilgi Güvenliği Risk Değerlendirme Yaklaşımları www.sisbel.biz
 ISO/IEC 20000-1 BİLGİ TEKNOLOJİSİ - HİZMET YÖNETİMİ BAŞ DENETÇİ EĞİTİMİ Bilgi Güvenliği Risk Değerlendirme Yaklaşımları E1-yüksek seviye bilgi güvenliği risk değerlendirmesi Yüksek seviye değerlendirme,
ISO/IEC 20000-1 BİLGİ TEKNOLOJİSİ - HİZMET YÖNETİMİ BAŞ DENETÇİ EĞİTİMİ Bilgi Güvenliği Risk Değerlendirme Yaklaşımları E1-yüksek seviye bilgi güvenliği risk değerlendirmesi Yüksek seviye değerlendirme,
a) Çıkarma işleminin; eksilen ile çıkanın ters işaretlisinin toplamı anlamına geldiğini kavrar.
 Çıkarma işleminin; eksilen ile çıkanın ters işaretlisinin toplamı anlamına geldiğini kavrar.") 7. SINIF KAZANIM VE AÇIKLAMALARI M.7.1. SAYILAR VE İŞLEMLER M.7.1.1. Tam Sayılarla Toplama, Çıkarma, Çarpma ve Bölme İşlemleri M.7.1.1.1. Tam sayılarla toplama ve çıkarma işlemlerini yapar; ilgili problemleri
7. SINIF KAZANIM VE AÇIKLAMALARI M.7.1. SAYILAR VE İŞLEMLER M.7.1.1. Tam Sayılarla Toplama, Çıkarma, Çarpma ve Bölme İşlemleri M.7.1.1.1. Tam sayılarla toplama ve çıkarma işlemlerini yapar; ilgili problemleri
5 İki Boyutlu Algılayıcılar
 65 5 İki Boyutlu Algılayıcılar 5.1 CCD Satır Kameralar Ölçülecek büyüklük, örneğin bir telin çapı, objeye uygun bir projeksiyon ile CCD satırının ışığa duyarlı elemanı üzerine düşürülerek ölçüm yapılır.
65 5 İki Boyutlu Algılayıcılar 5.1 CCD Satır Kameralar Ölçülecek büyüklük, örneğin bir telin çapı, objeye uygun bir projeksiyon ile CCD satırının ışığa duyarlı elemanı üzerine düşürülerek ölçüm yapılır.
Kinematik Modeller. Kesikli Hale Getirilmiş Sürekli Zaman Kinematik Modeller: Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder.
 1 Kinematik durum modelleri konumun belirli bir türevi sıfıra eşitlenerek elde edilir. Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder. Böyle modeller polinom modeller olarak ta bilinir
1 Kinematik durum modelleri konumun belirli bir türevi sıfıra eşitlenerek elde edilir. Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder. Böyle modeller polinom modeller olarak ta bilinir
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
SAAT KADRANININ OPTİK GÖRÜNTÜSÜNDEN SAATİN KAÇ OLDUĞUNU ANLAYAN GÖRÜNTÜ İŞLEM SİSTEMİ
 BAŞKENT ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ SAAT KADRANININ OPTİK GÖRÜNTÜSÜNDEN SAATİN KAÇ OLDUĞUNU ANLAYAN GÖRÜNTÜ İŞLEM SİSTEMİ AN IMAGE PROCESSING SYSTEM FOR READING TIME FROM THE OPTICAL IMAGE OF
BAŞKENT ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ SAAT KADRANININ OPTİK GÖRÜNTÜSÜNDEN SAATİN KAÇ OLDUĞUNU ANLAYAN GÖRÜNTÜ İŞLEM SİSTEMİ AN IMAGE PROCESSING SYSTEM FOR READING TIME FROM THE OPTICAL IMAGE OF
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU
 METODU") ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
Yrd. Doç. Dr. Saygın ABDİKAN Öğretim Yılı Bahar Dönemi
 Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2016-2017 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2016-2017 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN
 PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN 1995 yılında Dr.Eberhart ve Dr.Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir.
PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN 1995 yılında Dr.Eberhart ve Dr.Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir.
fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki olsun. Fonksiyonda meydana gelen artma miktarı
 10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
Dijital Görüntü İşleme Teknikleri
 Teknikleri Ders Notları, 2013 Doç. Dr. Fevzi Karslı Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 08 Ekim 2013 Salı 1 Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, temel kavramlar, kaynaklar.
Teknikleri Ders Notları, 2013 Doç. Dr. Fevzi Karslı Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 08 Ekim 2013 Salı 1 Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, temel kavramlar, kaynaklar.
Yrd. Doç. Dr. A. Burak İNNER Bilgisayar Mühendisliği
 Yrd. Doç. Dr. A. Burak İER Bilgisayar Mühendisliği Algoritma Analizi İçerik: Temel Kavramlar Yinelemeli ve Yinelemesiz Algoritma Analizi Asimptotik otasyonlar Temel Kavramlar Algoritma: Bir problemin çözümüne
Yrd. Doç. Dr. A. Burak İER Bilgisayar Mühendisliği Algoritma Analizi İçerik: Temel Kavramlar Yinelemeli ve Yinelemesiz Algoritma Analizi Asimptotik otasyonlar Temel Kavramlar Algoritma: Bir problemin çözümüne