Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
|
|
|
- Tülay Türkay
- 8 yıl önce
- İzleme sayısı:
Transkript
1 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü

2 Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2

3 3

4 Giriş Karmaşık sistemlerin anlaşılabilmesi ve kontrolü için, matematiksel model elde edilmesi bir gerekliliktir. İlgilenilen sistemler genelde dinamik olduğundan ortaya çıkacak denklemlerde diferansiyel formda olacaklardır. Dinamik sistem problemlerinde Sistem ve bileşenleri tanımlanır, Matematiksel model oluşturulur ve kabuller ortaya konur, Modeli karşılık geldiği diferansiyel denklemler yazılır, İstenen çıkış değerleri dikkate alınarak denklemler çözülür, Kabuller ve çözümler gözden geçirilir, Gerekli ise sistem tekrar analiz edilir ve tasarlanır. 4


5 Bazı dinamik sistemler ve matematiksel ifadeleri b f(t) k m y x Automatic control valve to adjust the liquid levels of the tanks by controlling the flap angle Valve to adjust the flow rate Q 3 between tanks Q 1 q 1 Discharge valve h 1 Q 2 Q 3 h2 Discharge valve Q 4 5


6 Sabit disk 6


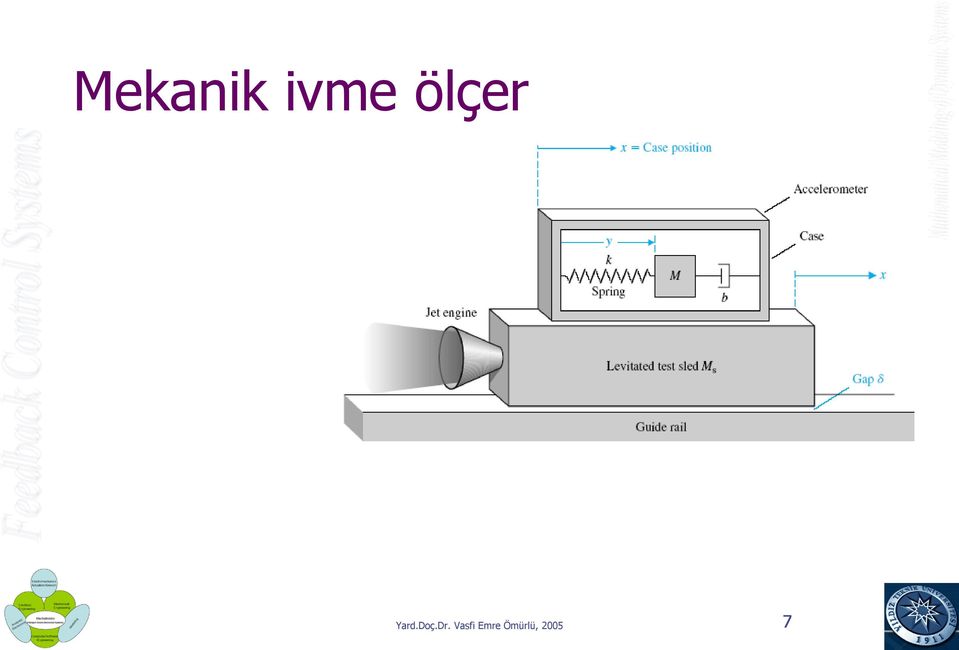
7 Mekanik ivme ölçer 7
8 Mekanik Sistem Elemanları İndüktif eleman Kapasitif eleman Enerji eleman soğurucu 8

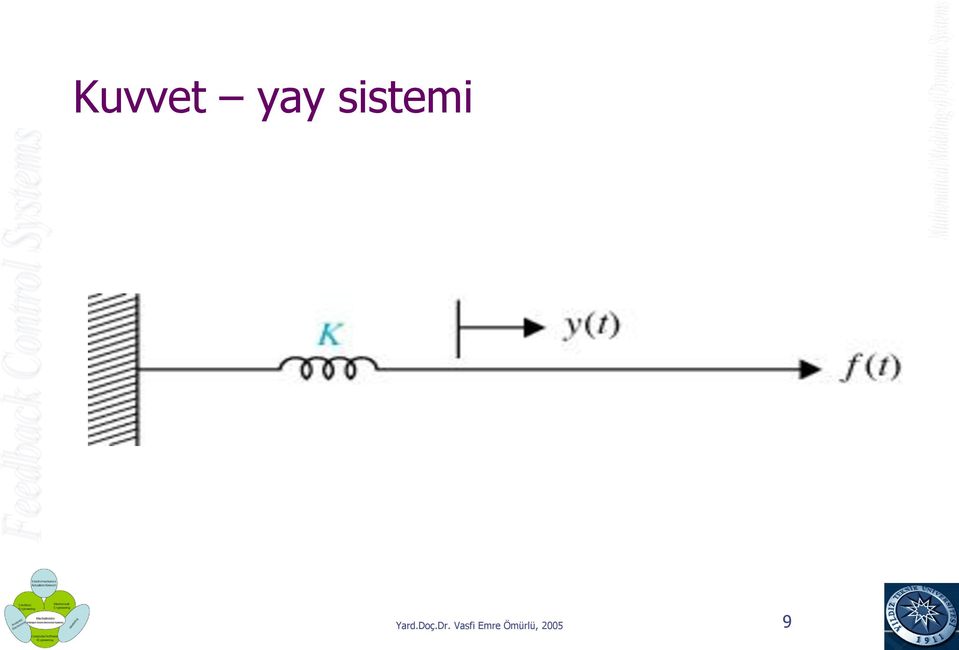
9 Kuvvet yay sistemi 9
10 Tork açısal yay sistemi 10

11 Viskoz sürtünme elemanı 11

12 Doğrusal ve doğrusal olmayan sürtünme kuvvetleri için ilişkiler (a) Viskoz sürtünme (b) Statik sürtünme (c) Coulomb sürtünmesi 12
 Statik sürtünme (c) Coulomb")
13 Kuvvet kütle sistemi 13

14 Tork atalet sistemi 14

15 Dönelden doğrusala hareket kontrol sistemi 15

16 Dönelden doğrusala hareket kontrol sistemi (kremayer dişli) 16

17 Dönelden doğrusala hareket kontrol sistemi (kayış kasnak sistemi) 17

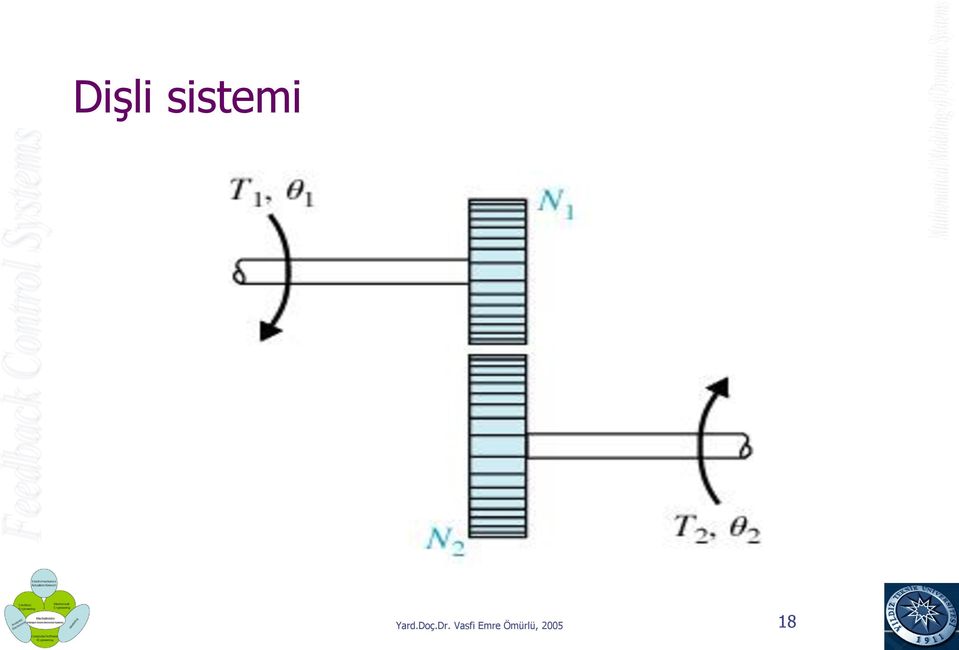
18 Dişli sistemi 18
19 İki mekanik eleman arasındaki boşluk sisteminin fiziksel modeli 19

20 Boşluk sisteminin giriş çıkış özellikleri 20


21 Mekanik sistemlerin modellenmesi 21
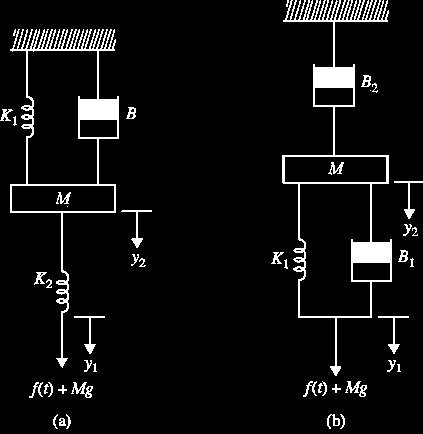
22 (a) Kütle yay sönüm sistemi (b) Serbest cisim çizimi (c) durum diagramı 22
23 (a) Kütle yay sistemi (b) Serbest cisim çizimi (c) Durum diagramı 23
24 Önceki sayfadaki mekanik sisteme benzer elektriksel devre gösterimi 24

25 Örnek Kuvvet girişi ve v 1 ve v 2 çıkışları arasındaki trasfer fonksiyonunu bulunuz. Elektriksel devrenin mekanik sistemle benzer olduğunu gösteriniz. 25
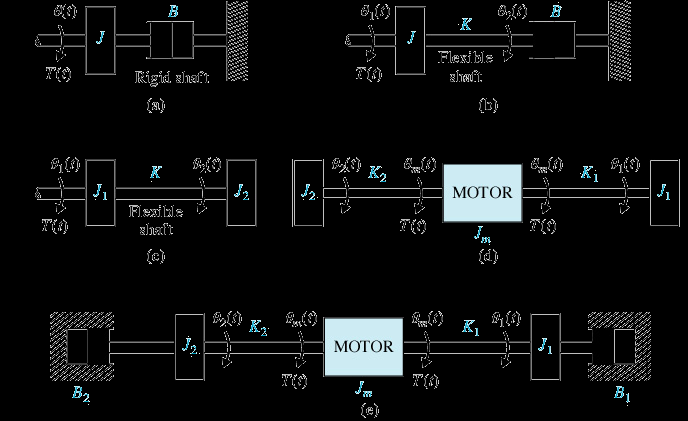
26 Dönel sistem 26
27 (a) Motor yük sistemi (b) Serbest cisim diagramı 27
28 Evvelki sayfadaki sistemin durum diagramı 28
29 Sürtünme ve atalet dahil olarak dişli sistemi 29
30 30
31 31
32 32
33 33
34 34
35 35
36 36
37 37
38 38
39 39
40 40
41 Elektriksel sistem elemanları İndüktif eleman Kapasitif eleman Enerji eleman soğurucu 41

42 Elektriksel sistemlerin modellenmesi v 1 ve v 2 arasındaki transfer fonksiyonunu bulunuz 42
, i Eleman boyunca geçen akım miktarı (A), R direnç (Ω,ohm), L İndüktans (H, henry), C Kapasitans (F, farad)")
43 Elektriksel sistem örnekleri İki çevrim içinde Kirchoff Voltaj Kanunu uygulanırsa Soldaki çevrim için Sağdaki çevrim için v elemanın iki ucu arasındaki voltaj farkı(v), i Eleman boyunca geçen akım miktarı (A), R direnç (Ω,ohm), L İndüktans (H, henry), C Kapasitans (F, farad) 43

44 Elektriksel sistemlerin modellenmesi 44
45 (a) RLC ağı (b) Durum diagramı 45
46 (a) Ağ (b) Durum diagramı 46
47 47 Elektriksel sistem örnekleri ) ( ) ( ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( R R s L C R R Cs LR s CR s V s I s I s CR R R s L C R R Cs LR s V s I s CR s CR R R Ls Cs R R R Cs LR s V s I R Cs R Cs R Ls R R s V s I R s I Cs R R Ls R R s V s I R s I Ls R R s V s I Ls s I s I R s I R s V in in in in in in in Sistem Transfer Fonksiyonu
48 10 dönüşlü dönel potansiyometre 48
49 Dahili operasyonel güçlendiricili doğrusal hareket potansiyometresi 49
50 Bir potansiyometrenin elektriksel devre gösterimi 50
51 (a) Konum göstergeli potansiyometre (b) İki milin konumunu ölçen iki potansiyometre 51
52 Evvelki sayfadaki potansiyometrelerin blok diagram gösterimleri 52
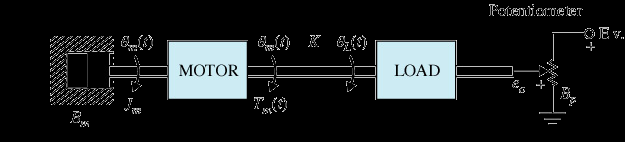
53 (a) Potansiyometre hata algılayıcısı olarak dc-motorlu hareket kontrol sistemi (b) Sistemdeki genel sinyal tipleri 53
54 (a) Potansiyometre hata algılayıcısı olmak üzere ac motorlu hareket kontrol sistemi (b) Sistemdeki genel sinyal tipleri 54
55 Takometre geribeslemeli hız kontrol sistemi 55
56 Takometre geribeslemeli konum kontrol sistemi 56
57 Dönel artımsal enkoder 57
58 Doğrusal artımsal enkoder 58
59 Genel artımsal enkoder yapısı 59
 Genel çift kanal çıkışlı bir enkoderin kara dalga çıkış şekli")
60 (a) Genel tek kanal çıkışlı bir enkoderin kara dalga çıkış şekli (b) Genel çift kanal çıkışlı bir enkoderin kara dalga çıkış şekli 60
 Genel çift kanal çıkışlı enkoder dalga")
61 (a) Genel tek kanal çıkışlı bir enkoderin sinüzoidal çıkış şekli (b) Genel çift kanal çıkışlı enkoder dalga şekli 61
62 Çift kanallı artımsal enkoderin çıkış sinyalinin bir peryodu 62
63 PM DC Motor Modellenmesi Genelde bir elektrik motorunda stator (alan) ve rotor (armatür) sarımları mevcuttur ve bu iki sarımdaki akım veya voltaj konrol edilerek, açısal hız veya tork kontrol edilebilir. Bu iki sarımın bağlantı şekillerine göre DC motorlar şu şekilde sınıflandırılabilirler. İki kutuplu kalıcı mıknatıslı bir DC motorun gösterimi yukarıda görülmektedir. Stator kutbu kalıcı mıknatıstır ve sabit manyetik alan üretir. Rotor sarımlarındaki akım yönünü ve dolayısıyla rotor sarımlarındaki kutupları değiştirerek, rotorun kendini dengelemesi için yeni konumlaması sağlanır ve buradan da açısal hareket elde edilir. Paralel bağlı Seri bağlı Değişken bağlı Karmaşık bağlı 63
64 DC motorda tork üretimi 64
65 Kalıcı mıknatıslı bir dc motorun kesit görünümü 65
66 Yüzey sarımlı kalıcı mıknatıslı bir dc motorun kesit görünümü 66
67 Cross-section side view of a moving-coil dc motor. 67
68 Fırçasız, kalıcı mıknatıslı dc motorun kesit görünümü 68
69 Sarımların ayrı tahrik edildiği bir dc motorun modeli 69
70 Bir dc motorun durum diagramı 70

71 Bir dc motorun blok diagramı 71
72 Kalıcı mıknatıslı dc motorun modellenmesi Motor hem elektriksel hem mekanik parçalar içerdiğinden modelde bu şekilde kurulmalıdır. Sistem akım girişi veya voltaj girişi ile tahrik edilebilir. Bu ise dönel mekanik enerjiye çevrilecektir. V ex : tahrik voltajı [V] i a : Armatür akımı [A] R a : Armatür direnci [ohm] L a : Armatür indüktansı [H] v bemf : Geri elektromotif kuvvet, (motor hızından kaynaklanan armatür sarımlarına binen elektriksel yük) [V] K v : motor hız sabiti (geri elektromotif kuvvet ile motor hızı arasındaki sabit katsayı) [V/(rad/sec)] K t : tork sabiti (motor akımı ile motorun ürettiği tork arasındaki sabit katsayı [Nm/A] J: motor ataleti [kgm 2 ] B: motor yatak sönüm katsayısı [Nm/(rad/sec)] T L : yük torku [Nm] 72
73 Kalıcı Mıknatıslı DC Motorun Modeli Elektriksel kısmın diferansiyel denklemi Mekanik kısmın diferansiyel denklemi Sıfır başlangıç şartları için yukarki denklemlerin Laplace dönüşümü 73
74 Kalıcı mıknatıslı dc motorun açık çevrim blok diagramı 74

75 Kalıcı mıknatıslı dc motorun kontrol problemi DC motorda neyi kontrol etmek isteriz

76 Maxon PM DC motor 76

77 Maxon PM DC motor By Vasfi Emre Ömürlü, Ph.D.,

78 Maxon PM DC motor 78

79 Farklı sistemler 79

80 Farklı sistemler 80

81 Elektrik motoru takip kontrolü 81
82 Doğrusal olmayan kontrol sistemi 82
83 Manyetik top askı sistemi 83
84 Gecikme olan sistemler 84

85 Güneş takib eden sistem şematik gösterimi 85

86 Güneş arayıcı sistemin koordinat sistemi 86
87 Güneş arayıcı sistemin blok diagramı 87
88 88
89 89
90 90
91 91
92 92
93 93
94 94
95 95
96 96
97 97
98 98
99 99
100 100
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI
 Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
Sistem Dinamiği. Bölüm 6. Elektrik ve Elektromekanik Sistemler. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü
 MAK-407 Müh. Tas. I S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A-ġubesi B-ġubesi
MAK-407 Müh. Tas. I S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A-ġubesi B-ġubesi
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
Doğru Akım Motorları
 08.05.2012 Doğru Akım Motorları Yrd. Doç. Dr. Aytaç Gören İçerik Doğru Akım Elektrik Motorları Doğru Akım Motorlarının Kısımları ve Özellikleri Güç Hesabı Adım (Step) Motorlar Servo Motorlar Lineer Servo
08.05.2012 Doğru Akım Motorları Yrd. Doç. Dr. Aytaç Gören İçerik Doğru Akım Elektrik Motorları Doğru Akım Motorlarının Kısımları ve Özellikleri Güç Hesabı Adım (Step) Motorlar Servo Motorlar Lineer Servo
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
ĠSTANBUL BOĞAZINDAKĠ AKINTI ENERJĠSĠ YARDIMIYLA ELEKTRĠK ELDESĠ Onur TULGAS Prof.Dr. Ayşen DEMİRÖREN, Prof. Dr. Ömer GÖREN, Y.Doç.Dr.
 1. Giriş ĠSTANBUL BOĞAZINDAKĠ AKINTI ENERJĠSĠ YARDIMIYLA ELEKTRĠK ELDESĠ Onur TULGAS Prof.Dr. Ayşen DEMİRÖREN, Prof. Dr. Ömer GÖREN, Y.Doç.Dr.Özgür ÜSTÜN Dünyamızda gerçekleşen ve hızla ilerleyen teknolojik
1. Giriş ĠSTANBUL BOĞAZINDAKĠ AKINTI ENERJĠSĠ YARDIMIYLA ELEKTRĠK ELDESĠ Onur TULGAS Prof.Dr. Ayşen DEMİRÖREN, Prof. Dr. Ömer GÖREN, Y.Doç.Dr.Özgür ÜSTÜN Dünyamızda gerçekleşen ve hızla ilerleyen teknolojik
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
KONUM ALGILAMA YÖNTEMLERİ VE KONTROLÜ
 KONUM ALGILAMA YÖNTEMLERİ VE KONTROLÜ 1. AMAÇ: Endüstride kullanılan direnç, kapasite ve indüktans tipi konum (yerdeğiştirme) algılama transdüserlerinin temel ilkelerini açıklayıp kapalı döngü denetim
KONUM ALGILAMA YÖNTEMLERİ VE KONTROLÜ 1. AMAÇ: Endüstride kullanılan direnç, kapasite ve indüktans tipi konum (yerdeğiştirme) algılama transdüserlerinin temel ilkelerini açıklayıp kapalı döngü denetim
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
FİZ217 TİTREŞİMLER VE DALGALAR DERSİNİN 2. ARA SINAV SORU CEVAPLARI
 1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
Online teknik sayfa SEM70-HN025AK22 SES/SEM70 MOTOR FEEDBACK SISTEMLERI ROTATIF HIPERFACE
 Online teknik sayfa SEM70-HN025AK22 SES/SEM70 A B C D E F H I J K L M N O P Q R S T Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar
Online teknik sayfa SEM70-HN025AK22 SES/SEM70 A B C D E F H I J K L M N O P Q R S T Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Temel Devre Elemanlarının Alternatif Gerilim Etkisi Altındaki Davranışları
 Temel Devre Elemanlarının Alternatif Gerilim Etkisi Altındaki Davranışları Direnç (R) Alternatif gerilimin etkisi altındaki direnç, Ohm kanunun bilinen ifadesini korur. Denklemlerden elde edilen sonuç
Temel Devre Elemanlarının Alternatif Gerilim Etkisi Altındaki Davranışları Direnç (R) Alternatif gerilimin etkisi altındaki direnç, Ohm kanunun bilinen ifadesini korur. Denklemlerden elde edilen sonuç
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
EĞİTİM-ÖĞRETİM YILI 11 SINIF FİZİK DERSİ DESTEKLEME VE YETİŞTİRME KURSU KAZANIMLARI VE TESTLERİ
 KASIM EKİM 2017-2018 EĞİTİM-ÖĞRETİM YILI 11 SINIF FİZİK DERSİ DESTEKLEME VE YETİŞTİRME KURSU KAZANIMLARI VE TESTLERİ Ay Hafta Ders Saati Konu Adı Kazanımlar Test No Test Adı 1 4 Vektörler 11.1.1.1. Vektörlerin
KASIM EKİM 2017-2018 EĞİTİM-ÖĞRETİM YILI 11 SINIF FİZİK DERSİ DESTEKLEME VE YETİŞTİRME KURSU KAZANIMLARI VE TESTLERİ Ay Hafta Ders Saati Konu Adı Kazanımlar Test No Test Adı 1 4 Vektörler 11.1.1.1. Vektörlerin
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
ASİSTAN ARŞ. GÖR. GÜL DAYAN
 ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
Contents. Doğrusal sistemler için kontrol tasarım yaklaşımları
 Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
2 MALZEME ÖZELLİKLERİ
 ÖNSÖZ İÇİNDEKİLER III Bölüm 1 TEMEL KAVRAMLAR 11 1.1. Fizik 12 1.2. Fiziksel Büyüklükler 12 1.3. Ölçme ve Birim Sistemleri 13 1.4. Çevirmeler 15 1.5. Üstel İfadeler ve İşlemler 18 1.6. Boyut Denklemleri
ÖNSÖZ İÇİNDEKİLER III Bölüm 1 TEMEL KAVRAMLAR 11 1.1. Fizik 12 1.2. Fiziksel Büyüklükler 12 1.3. Ölçme ve Birim Sistemleri 13 1.4. Çevirmeler 15 1.5. Üstel İfadeler ve İşlemler 18 1.6. Boyut Denklemleri
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Electric Vehicles- 4 EVs V s 4
 Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ
 Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi. H a z ı r l aya n : D r. N u r d a n B i l g i n
 Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Sistemin İşlevsel Kalitesi Kapalı Çevrim Kontrol Sistemin İşlevsel
Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Sistemin İşlevsel Kalitesi Kapalı Çevrim Kontrol Sistemin İşlevsel
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders # Otomatik Kontrol Laplas Dönüşümü Pierre-Simon Laplace, 749-87 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ Zamanla değişen bir f(t)
Ders # Otomatik Kontrol Laplas Dönüşümü Pierre-Simon Laplace, 749-87 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ Zamanla değişen bir f(t)
Elektrik Motorları ve Sürücüleri
 Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
14. SİNÜSOİDAL AKIMDA DİRENÇ, KAPASİTE, İNDÜKTANS VE ORTAK İNDÜKTANSIN ÖLÇÜLMESİ
 14. SİNÜSOİDAL AKIMDA DİRENÇ, KAPASİTE, İNDÜKTANS VE ORTAK İNDÜKTANSIN ÖLÇÜLMESİ Sinüsoidal Akımda Direncin Ölçülmesi Sinüsoidal akımda, direnç üzerindeki gerilim ve akım dalga şekilleri ve fazörleri aşağıdaki
14. SİNÜSOİDAL AKIMDA DİRENÇ, KAPASİTE, İNDÜKTANS VE ORTAK İNDÜKTANSIN ÖLÇÜLMESİ Sinüsoidal Akımda Direncin Ölçülmesi Sinüsoidal akımda, direnç üzerindeki gerilim ve akım dalga şekilleri ve fazörleri aşağıdaki
6.PROGRAMIN SEVİYESİ:
 ÖZEL ÇORUM ADA ÖZEL ÖĞRETİM KURSU FİZİK 3 BİLİM GRUBU ÇERÇEVE PROGRAMI 1. KURUMUN ADI: Özel Çorum Ada Özel Öğretim Kursu 2. KURUMUN ADRESİ: Yavruturna Mah. Kavukçu Sok. No:46/A ÇORUM/MERKEZ 3. KURUCUNUN
ÖZEL ÇORUM ADA ÖZEL ÖĞRETİM KURSU FİZİK 3 BİLİM GRUBU ÇERÇEVE PROGRAMI 1. KURUMUN ADI: Özel Çorum Ada Özel Öğretim Kursu 2. KURUMUN ADRESİ: Yavruturna Mah. Kavukçu Sok. No:46/A ÇORUM/MERKEZ 3. KURUCUNUN
MESAFE VE KONUM ALGILAYICILARI
 MESAFE VE KONUM ALGILAYICILARI Mesafe (veya yer değiştirme) algılayıcıları birçok farklı türde ölçüm sistemini temel alabilir. Temassız tip mesafe algılayıcıları imalat sanayinde geniş kullanım alanına
MESAFE VE KONUM ALGILAYICILARI Mesafe (veya yer değiştirme) algılayıcıları birçok farklı türde ölçüm sistemini temel alabilir. Temassız tip mesafe algılayıcıları imalat sanayinde geniş kullanım alanına
AKIŞKANLAR MEKANİĞİ-II
 AKIŞKANLAR MEKANİĞİ-II Şekil 1. Akışa bırakılan parçacıkların parçacık izlemeli hızölçer ile belirlenmiş cisim arkasındaki (iz bölgesi) yörüngeleri ve hızlarının zamana göre değişimi (renk skalası). Akış
AKIŞKANLAR MEKANİĞİ-II Şekil 1. Akışa bırakılan parçacıkların parçacık izlemeli hızölçer ile belirlenmiş cisim arkasındaki (iz bölgesi) yörüngeleri ve hızlarının zamana göre değişimi (renk skalası). Akış
Elektrik Akımı, Direnç ve Ohm Yasası
 1. Akım Şiddeti Elektrik akımı, elektrik yüklerinin hareketi sonucu oluşur. Ancak her hareketli yük akım yaratmaz. Belirli bir bölge ya da yüzeyden net bir elektrik yük akışı olduğu durumda elektrik akımından
1. Akım Şiddeti Elektrik akımı, elektrik yüklerinin hareketi sonucu oluşur. Ancak her hareketli yük akım yaratmaz. Belirli bir bölge ya da yüzeyden net bir elektrik yük akışı olduğu durumda elektrik akımından
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
2-MANYETIK ALANLAR İÇİN GAUSS YASASI
 2-MANYETIK ALANLAR İÇİN GAUSS YASASI Elektrik yükleri yani pozitif ve negatif yükler birbirlerinden ayrı ve izole halde düşünülebilirler. Bu durum, Kuzey ve güney manyetik kutuplar için de söz konusu olabilir
2-MANYETIK ALANLAR İÇİN GAUSS YASASI Elektrik yükleri yani pozitif ve negatif yükler birbirlerinden ayrı ve izole halde düşünülebilirler. Bu durum, Kuzey ve güney manyetik kutuplar için de söz konusu olabilir
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
Hazırlayan: Tugay ARSLAN
 Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
BÖLÜM Turbomakinaların Temelleri:
 1 BÖLÜM 2 2.1. Turbomakinaların Temelleri: Yenilenebilir ve alternatif enerji kaynaklarının iki önemli kategorisi rüzgar ve hidroelektrik enerjidir. Fosil yakıtların bilinenin dışındaki alternatif uygulamalarından
1 BÖLÜM 2 2.1. Turbomakinaların Temelleri: Yenilenebilir ve alternatif enerji kaynaklarının iki önemli kategorisi rüzgar ve hidroelektrik enerjidir. Fosil yakıtların bilinenin dışındaki alternatif uygulamalarından
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
Hız-Moment Dönüşüm Mekanizmaları. Vedat Temiz
 Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
Hidrostatik Güç İletimi. Vedat Temiz
 Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
SABİT MIKNATISLI SENKRON MOTOR
 SABİT MIKNATISLI SENKRON MOTOR ÜRÜN GÖSTERİMİ TEKNİK YENİLİK ANA KARAKTERİSTİĞİ Yüksek Verim ve Enerji Tasarrufu Küçük Boyutlu ve Daha Düşük Bir Kütle Yüksek Performans Yüksek Sorumluluk Güçlü Yapı Kontrolü
SABİT MIKNATISLI SENKRON MOTOR ÜRÜN GÖSTERİMİ TEKNİK YENİLİK ANA KARAKTERİSTİĞİ Yüksek Verim ve Enerji Tasarrufu Küçük Boyutlu ve Daha Düşük Bir Kütle Yüksek Performans Yüksek Sorumluluk Güçlü Yapı Kontrolü
OTOMATİK KONTROL DERS NOTLARI. DERLEYEN: Doç. Dr. Hüseyin BULGURCU. Kasım 2014. BAU MMF Makine Müh. Bölümü
 1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin
1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin
Alternatif Akım. Yrd. Doç. Dr. Aytaç Gören. Alternatif Akım
 Yrd. Doç. Dr. Aytaç Gören Paralel devre 2 İlk durum: 3 Ohm kanunu uygulandığında; 4 Ohm kanunu uygulandığında; 5 Paralel devrede empedans denklemi, 6 Kondansatör (Kapasitans) Alternatif gerilimin etkisi
Yrd. Doç. Dr. Aytaç Gören Paralel devre 2 İlk durum: 3 Ohm kanunu uygulandığında; 4 Ohm kanunu uygulandığında; 5 Paralel devrede empedans denklemi, 6 Kondansatör (Kapasitans) Alternatif gerilimin etkisi
Ders 3- Direnç Devreleri I
 Ders 3- Direnç Devreleri I Yard.Doç.Dr. Ahmet Özkurt Ahmet.ozkurt@deu.edu.tr http://ahmetozkurt.net İçerik 2. Direnç Devreleri Ohm kanunu Güç tüketimi Kirchoff Kanunları Seri ve paralel dirençler Elektriksel
Ders 3- Direnç Devreleri I Yard.Doç.Dr. Ahmet Özkurt Ahmet.ozkurt@deu.edu.tr http://ahmetozkurt.net İçerik 2. Direnç Devreleri Ohm kanunu Güç tüketimi Kirchoff Kanunları Seri ve paralel dirençler Elektriksel
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ
 1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
TOSYA ANADOLU İMAM-HATİP LİSESİ 2015-2016 DERS YILI 11. SINIFLAR FİZİK DERSİ ÜNİTELENDİRİLMİŞ YILLIK PLANI
 EKİM EYLÜL EYLÜL EYLÜL 4 5 4 11.1. Kuvvet ve 11.1.1. Vektörler 11.1.1. Vektörler 11.1.2. Bağıl 11.1.1.1. Vektörlerin özelliklerini açıklar. 11.1.1.2. Vektörel büyüklükleri kartezyen koordinat sisteminde
EKİM EYLÜL EYLÜL EYLÜL 4 5 4 11.1. Kuvvet ve 11.1.1. Vektörler 11.1.1. Vektörler 11.1.2. Bağıl 11.1.1.1. Vektörlerin özelliklerini açıklar. 11.1.1.2. Vektörel büyüklükleri kartezyen koordinat sisteminde
Online teknik sayfa. ACM60B-S1KE13x06 ACM60 MUTLAK ENKODER
 Online teknik sayfa ACM60B-SKEx06 ACM60 A B C D E F H I J K L M N O P Q R S T Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Devir başına adım sayısı Devir sayısı Sipariş bilgileri Tip Diğer
Online teknik sayfa ACM60B-SKEx06 ACM60 A B C D E F H I J K L M N O P Q R S T Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Devir başına adım sayısı Devir sayısı Sipariş bilgileri Tip Diğer
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Yrd. Doç. Dr. Levent Çetin. Alternatif Gerilim. Alternatif Akımın Fazör Olarak İfadesi. Temel Devre Elemanlarının AG Etkisi Altındaki Davranışları
 Yrd. Doç. Dr. Levent Çetin İçerik Alternatif Gerilim Faz Kavramı ın Fazör Olarak İfadesi Direnç, Reaktans ve Empedans Kavramları Devresinde Güç 2 Alternatif Gerilim Alternatif gerilim, devre üzerindeki
Yrd. Doç. Dr. Levent Çetin İçerik Alternatif Gerilim Faz Kavramı ın Fazör Olarak İfadesi Direnç, Reaktans ve Empedans Kavramları Devresinde Güç 2 Alternatif Gerilim Alternatif gerilim, devre üzerindeki
1. Kayma dirençli ( Kaymalı) Yataklar 2. Yuvarlanma dirençli ( Yuvarlanmalı=Rulmanlı ) Yataklar
 Yataklar 2. Yuvarlanma dirençli ( Yuvarlanmalı=Rulmanlı ) Yataklar") YATAKLAR Miller, dönel ve doğrusal hareketlerini bir yerden başka bir yere nakletmek amacıyla üzerlerine dişli çark, zincir, kayış-kasnak ve kavramalara bağlanır. İşte yataklar; millerin bu görevlerini
YATAKLAR Miller, dönel ve doğrusal hareketlerini bir yerden başka bir yere nakletmek amacıyla üzerlerine dişli çark, zincir, kayış-kasnak ve kavramalara bağlanır. İşte yataklar; millerin bu görevlerini
3. Bölüm: Asenkron Motorlar. Doç. Dr. Ersan KABALCI
 3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
ELEKTROMANYETİK DALGA TEORİSİ DERS - 5
 ELEKTROMANYETİK DALGA TEORİSİ DERS - 5 İletim Hatları İLETİM HATLARI İletim hatlarının tarihsel gelişimi iki iletkenli basit hatlarla (ilk telefon hatlarında olduğu gibi) başlamıştır. Mikrodalga enerjisinin
ELEKTROMANYETİK DALGA TEORİSİ DERS - 5 İletim Hatları İLETİM HATLARI İletim hatlarının tarihsel gelişimi iki iletkenli basit hatlarla (ilk telefon hatlarında olduğu gibi) başlamıştır. Mikrodalga enerjisinin
2: MALZEME ÖZELLİKLERİ
 İÇİNDEKİLER Önsöz III Bölüm 1: TEMEL KAVRAMLAR 11 1.1.Mekanik, Tanımlar 12 1.1.1.Madde ve Özellikleri 12 1.2.Sayılar, Çevirmeler 13 1.2.1.Üslü Sayılarla İşlemler 13 1.2.2.Köklü Sayılarla İşlemler 16 1.2.3.İkinci
İÇİNDEKİLER Önsöz III Bölüm 1: TEMEL KAVRAMLAR 11 1.1.Mekanik, Tanımlar 12 1.1.1.Madde ve Özellikleri 12 1.2.Sayılar, Çevirmeler 13 1.2.1.Üslü Sayılarla İşlemler 13 1.2.2.Köklü Sayılarla İşlemler 16 1.2.3.İkinci
DENEY-4 WHEATSTONE KÖPRÜSÜ VE DÜĞÜM GERİLİMLERİ YÖNTEMİ
 DENEY- WHEATSTONE KÖPÜSÜ VE DÜĞÜM GEİLİMLEİ YÖNTEMİ Deneyin Amacı: Wheatson köprüsünün anlaşılması, düğüm gerilimi ile dal gerilimi arasındaki ilişkinin incelenmesi. Kullanılan Alet-Malzemeler: a) DC güç
DENEY- WHEATSTONE KÖPÜSÜ VE DÜĞÜM GEİLİMLEİ YÖNTEMİ Deneyin Amacı: Wheatson köprüsünün anlaşılması, düğüm gerilimi ile dal gerilimi arasındaki ilişkinin incelenmesi. Kullanılan Alet-Malzemeler: a) DC güç
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
Elektromanyetik Dalga Teorisi
 Elektromanyetik Dalga Teorisi Ders-1 Diferansiyel Formda Maxwell Denklemleri İntegral Formda Maxwell Denklemleri Fazörlerin Kullanımı Zamanda Harmonik Alanlar Malzeme Ortamı Dalga Denklemleri Michael Faraday,
Elektromanyetik Dalga Teorisi Ders-1 Diferansiyel Formda Maxwell Denklemleri İntegral Formda Maxwell Denklemleri Fazörlerin Kullanımı Zamanda Harmonik Alanlar Malzeme Ortamı Dalga Denklemleri Michael Faraday,
KST Lab. Manyetik Top Askı Sistemi Deney Föyü
 KST Lab. Manyetik Top Askı Sistemi Deney Föyü. Deney Düzeneği Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada
KST Lab. Manyetik Top Askı Sistemi Deney Föyü. Deney Düzeneği Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada
ELEKTROMANYETIK DALGALAR
 ELEKTROMANYETIK DALGALAR EEM 10/1/2018 AG 1 kaynaklar: 1) Muhendislikelektromenyetiginin temelleri, David K. Cheng, Palme Yayincilik 2) Electromagnetic Field Theory Fundamentals, Guru&Hiziroglu 3) A Student
ELEKTROMANYETIK DALGALAR EEM 10/1/2018 AG 1 kaynaklar: 1) Muhendislikelektromenyetiginin temelleri, David K. Cheng, Palme Yayincilik 2) Electromagnetic Field Theory Fundamentals, Guru&Hiziroglu 3) A Student
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Online teknik sayfa ACS36-K1K0-K01 ACS/ACM36 MUTLAK ENKODER
 Online teknik sayfa ACS36-K1K0-K01 ACS/ACM36 A B C D E F Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Devir başına adım sayısı Devir sayısı Sipariş bilgileri Tip Stok no. ACS36-K1K0-K01
Online teknik sayfa ACS36-K1K0-K01 ACS/ACM36 A B C D E F Resimler farklı olabilir Ayrıntılı teknik bilgiler Performans Devir başına adım sayısı Devir sayısı Sipariş bilgileri Tip Stok no. ACS36-K1K0-K01
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ
 BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1
 Yazar: Yrd. Doç. Dr. Mustafa Turan S1") ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
MIT 8.02, Bahar 2002 Ödev # 6 Çözümler
 Adam S. Bolton bolton@mit.edu MIT 8.02, Bahar 2002 Ödev # 6 Çözümler 5 Nisan 2002 Problem 6.1 Dönen Bobin.(Giancoli 29-62) Bobin, yüzü manyetik alana dik olarak başlar (daha bilimsel konuşmak gerekirse,
Adam S. Bolton bolton@mit.edu MIT 8.02, Bahar 2002 Ödev # 6 Çözümler 5 Nisan 2002 Problem 6.1 Dönen Bobin.(Giancoli 29-62) Bobin, yüzü manyetik alana dik olarak başlar (daha bilimsel konuşmak gerekirse,
Manyetik Alan Şiddeti ve Ampere Devre Yasası
 Manyetik Alan Şiddeti ve Ampere Devre Yasası Elektrik alanlar için elektrik akı yoğunluğunu, elektrik alan şiddeti cinsinden tanımlamıştık. Buna benzer şekilde manyetik alan şiddetiyle manyetik akı yoğunluğu
Manyetik Alan Şiddeti ve Ampere Devre Yasası Elektrik alanlar için elektrik akı yoğunluğunu, elektrik alan şiddeti cinsinden tanımlamıştık. Buna benzer şekilde manyetik alan şiddetiyle manyetik akı yoğunluğu
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
MEKANİK TİTREŞİMLER. Doç. Dr. Mehmet İTİK
 MEKANİK TİTREŞİMLER Doç. Dr. Mehmet İTİK Mekanik Titreşimler Ders Planı Ders İçeriği: Titreşim ile ilgili temel kavramlar Mekanik sistemlerin serbest ve zorlanmış titreşimleri. Çok serbestlik dereceli
MEKANİK TİTREŞİMLER Doç. Dr. Mehmet İTİK Mekanik Titreşimler Ders Planı Ders İçeriği: Titreşim ile ilgili temel kavramlar Mekanik sistemlerin serbest ve zorlanmış titreşimleri. Çok serbestlik dereceli
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
7. Hareketli (Analog) Ölçü Aletleri
 Ölçü Aletleri") 7. Hareketli (Analog) Ölçü Aletleri Hareketli ölçü aletleri genellikle; 1. Sabit bir bobin 2. Dönebilen çok küçük bir parçadan oluşur. Dönebilen parçanın etkisi statik sürtünme (M ss ) şeklindedir. Bunun
7. Hareketli (Analog) Ölçü Aletleri Hareketli ölçü aletleri genellikle; 1. Sabit bir bobin 2. Dönebilen çok küçük bir parçadan oluşur. Dönebilen parçanın etkisi statik sürtünme (M ss ) şeklindedir. Bunun
GEMİ DİRENCİ ve SEVKİ
 GEMİ DİRENCİ ve SEVKİ 1. GEMİ DİRENCİNE GİRİŞ Geminin istenen bir hızda seyredebilmesi için, ana makine gücünün doğru bir şekilde seçilmesi gerekir. Bu da gemiye etkiyen su ve hava dirençlerini yenebilecek
GEMİ DİRENCİ ve SEVKİ 1. GEMİ DİRENCİNE GİRİŞ Geminin istenen bir hızda seyredebilmesi için, ana makine gücünün doğru bir şekilde seçilmesi gerekir. Bu da gemiye etkiyen su ve hava dirençlerini yenebilecek