OTOMATİK KONTROL DERS NOTLARI. DERLEYEN: Doç. Dr. Hüseyin BULGURCU. Kasım BAU MMF Makine Müh. Bölümü
|
|
|
- Canan Türker
- 8 yıl önce
- İzleme sayısı:
Transkript
1 1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014


2 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin analizi, tasarımı ve uygulamaları ile ilgilidir. Hedef odaklı sistemler aşağıdaki durumları sağlar: Sistem değişkenlerini istenen sabit değerde kalacak şekilde düzenler (araç sabit hız kontrolü, oda sıcaklık kontrolü, vb.) Sistem değişkenlerini sürekli izleyerek istenen değerler haline dönüştürülmesi denetlenir (robot hareketi, güdümlü füze, vb.) Otomatik Kontrol Sistemleri Nedir? Bir kontrol sistemi istenilen sistem cevaplarını almak üzere sistemi oluşturan bileşenler arasında bir düzenleme yapılmasıdır. Süreç; kontrol edilmesi gereken bir bileşendir (veya bileşenlerdir). Denetleyici; süreci kontrol eden bir bileşendir. Denetim; insan müdahalesi olmadan otomatik olarak yapılır. Süreç Süreç çıkışları kontrol edilmesi gereken değişkenlerdir. Süreç girişleri denetleyici tarafından yönlendirilmesi gereken değişkenlerdir. Şekil-1 Çoklu giriş, çoklu çıkış süreçleri Denetleyici (Kontrol Cihazı) Denetleyici çıkışları; süreci yönlendirilen değişkenleridir. Denetleyici girişleri; süreç çıkış değişkenlerinin istenen değerlerini ve aynı zamanda süreç değişkenlerinin gerçek değerlerini (geri besleme) kapsar. Denetleyicinin amacı süreç çıkış değişkenlerini istenen gerçek değerlere dönüştürmektir. Tek Girişli, Tek Çıkışlı Süreç Açık Döngülü Süreç Kapalı Döngülü Süreç
.")
. Hız hataları düzeltilebilir.")
3 3 Açık Döngülü Denetim İstenen hız; yükseltici giriş voltajı ile ayarlanır (Hassas motor-yükseltici modeli gerekli!). Hız hataları düzeltilemez. Kapalı Döngülü Denetim İstenen hız; yükseltici giriş voltajı ile ayarlanır (Hassas motor-yükseltici modeli gerekli değil!). Hız hataları düzeltilebilir. Denetim Sistemlerinin Tarihçesi 1769 Buhar Makinesi Regülatörü (Watt) 1868 Regülatör kontrol analizi (Maxwell) 1927 Telefon yükseltici analizi (Bode) 1932 Kararlılık analizi (Nyquist) 1940 Otomatik pilotlar, silah takip sistemleri, radar, vb Makine takım sayısal denetimi (MIT) 1970 Durum değişkeni modelleri, optimal denetim 1994 Otomobillerde kapsamlı geri bildirim denetimi Neden Otomatik Kontrol Eğitimi? Endüstriyel süreçlerin otomatik denetimi (kimya, kağıt, otomotiv, vb.) Daha ucuz ürünler Daha güvenli ve yüksek kaliteli ürünler Pazardaki değişimlere daha hızlı uyum Otomatik kontrol şu alanlarda çok önemlidir: Haberleşme sistemleri ve cihazları Askeri ve havacılık sistemleri Bilgisayar disk sürücüleri ve yazıcılar, vb.

4 4 Bir Denetim Sistemi Neden Çok Önemlidir? Tepki (cevap) hızı Doğruluk Dinamik aşma değeri Kararlı durum hatası Kararlılık Sağlamlık Modellerde hatalar Doğrusal olmayan ve dinamik değişen süreçler Bozucu tesirlerin etkisi Ders Hedefleri Öğrenciler Otomatik Kontrol Dersini tamamladığında: Denetim sistemlerinin tasarımı analizindeki kontrol kuramını anlar. Denetim sistemi mimarisinin etkisini ve sistem performansını, parametre değerlerini ve sistem dinamiklerini anlar. Denetim analizi ve tasarımında bilgisayar cihazlarının kullanımını anlar. Sürekli denetimde ile benzerlikleri ve ayrık denetimi (bilgisayar) anlar. BÖLÜM-2 SİSTEMLERİN MATEMATİK MODELİ Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için sayısal matematik model gereklidir. Bir çok fiziksel sistemlerin modellenmesinde esas yöntemdir: Mekanik Elektrik Hidrolik Biyolojik Modelleme Adımları Fiziksel sistemi ve elemanlarını anlamak Basitleştirmek için uygun kabuller yapmak Matematik modeli formüle etmek için temel prensipler kullanmak Modeli tanımlayan cebirsel veya diferansiyel denklemleri yazmak Modelin geçerliliğini test etmek Modeli Ne Amaçla Kullanacağız? Diferansiyel veya cebirsel denklemlerin çözülmesi sistem tepkisinin, performans analizinin ve tasarımının yapılmasına imkân verir. Modele Laplace dönüşümlerinin uygulanması; uygun yönlendirmelere ve dinamik analize imkân verir. Sistemler ve elemanları için giriş-çıkış ilişkileri alınabilir. Denetleyici modelleri donanıma uygun şekilde tasarlanabilecektir.


5 5 Mekanik Yay-Kütle Sistemi Kütlesi M olan bir cismin sürtünmesiz ortamda sabit bir duvara, katsayısı k olan bir yay ile bağlandığını kabul edelim: Kütlenin zamana bağlı konum pozisyonu için bir modele ihtiyaç vardır. Fiziksel Sistemin Analizi Yay kuvveti yalnızca kütle kuvvetinden etkilenir. Yay kütleye ters yönde oransal bir kuvvet uygular: Newton Kanunu: F=M.a Diferansiyel Eşitliğin Çıkarılması İkinci dereceden işlem n : Doğal frekans (Sönümlenmemiş) n genel anlamı ile soyut bir terimdir.

 gerilir.")
6 6 Sistem Karakteristikleri Sistem girişe sahip değildir. Kütleyi dışarıdan etkileyen bir kuvvet yoktur. Türev eşitliğinde sağ tarafta sıfır ile gösterilir. Sistem sönümlemeye sahip değildir. Sistemde enerji salınımı yoktur. Türev eşitliğinde bu birinci terimin ihmal edilmesiyle gösterilir. Yay-Kütle-Damper Sistemi Kütle yay sabiti k olan bir yayın son konumundan x(t) gerilir. Sönümleme katsayısı C olan amortisör harekete hızla orantılı direnç gösterir.
 gerilir.")
7 7 İkinci Derecede İşlem Cevabı Sistem girişi: x(t)=1 m n=2 r/s
=1")

8 Hidrolik Silindir 8
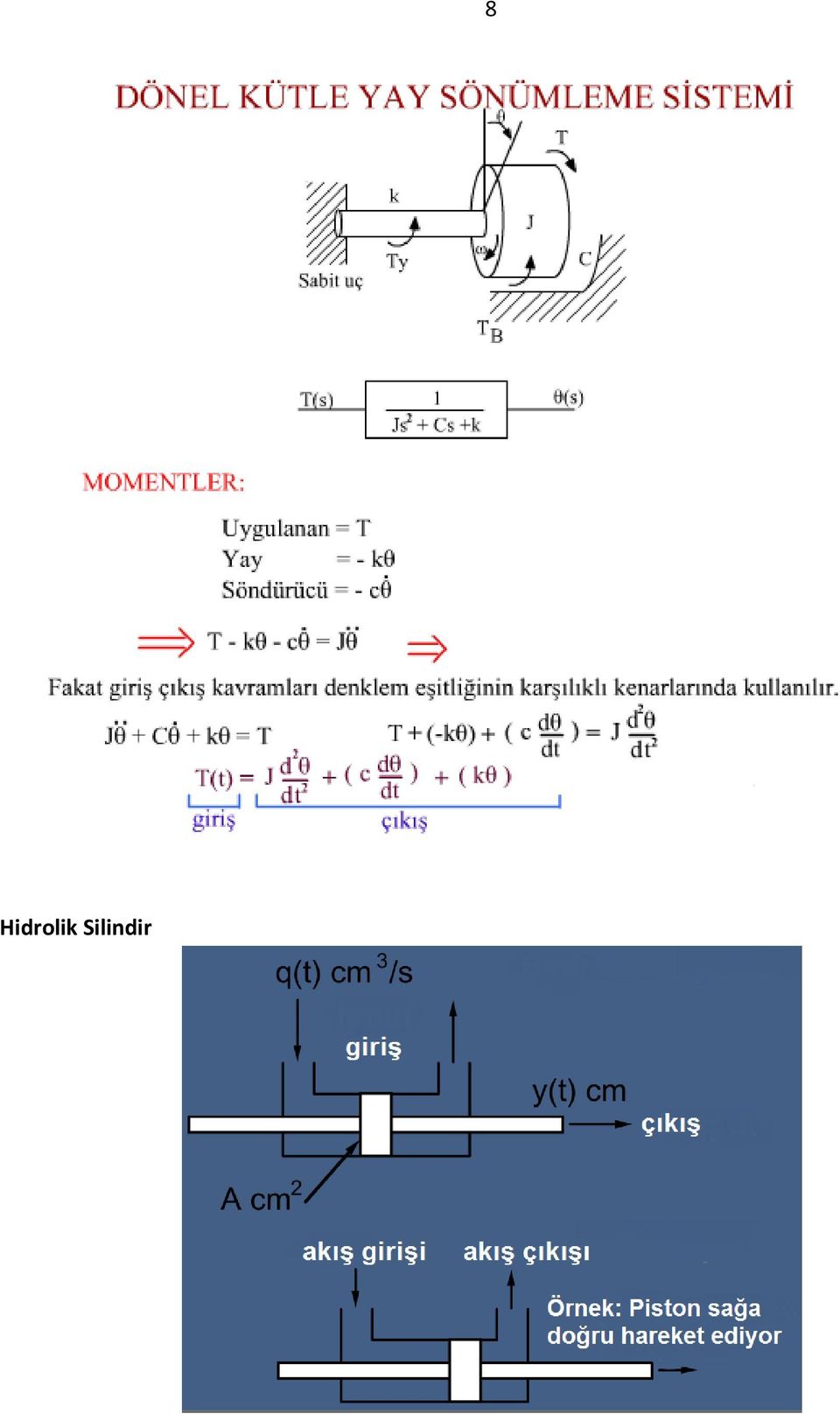
=1 cm 3 /s RC")
9 9 İntegral İşlem Cevabı Adım giriş: q(t)=1 cm 3 /s RC Devre
=1 cm 3 /s")
= 1 Volt = 1 saniye Karışım Vanası ve")
10 10 Birinci Derece İşlem Cevabı Adım girişi: x(t)= 1 Volt = 1 saniye Karışım Vanası ve Boru


11 11 Yaygın İşlem Tipleri Bileşen Kombinasyon Örneği

12 12 Çalışır Model Oluşturulması Hedef düşük dereceden doğrusal modeli geçerli kılmak ve bir bakışta hissetmektir. Fiziksel bileşenleri anlamak Uygun kabuller yapmak Model için basit bağıntıları kullanmak Gerektiğinde doğrusal hale getirmek Diferansiyel ve cebirsel eşitlikler yazmak Bağıntıları birleştirmek ve basitleştirmek Modelin geçerliliğini test etmek Yaygın İşlem Tipleri Yay-Kütle Modeli İçin Varsayımlar Yay sola doğru aşırı sıkıştırılırsa model doğru mudur? Yay sağa doğru aşırı uzatılırsa model doğru mudur?


13 13 Yay-Kütle Sisteminin Doğrusallığı Tüm modeller bir yaklaşım öngörür ve böylelikle bazı hatalar içerir. Bir aralıkta, belli bir çalışma noktası etrafında, sistem davranışlarını doğrusal bir modele yaklaştırılır. Doğrusallaştırma Bir sistemin doğru bir bileşeni için; Şayet x 1 giriş için y 1 çıkış alınıyor ve Şayet x 2 girişi için y 2 çıkışı alınıyorsa sonra x 1 +x 2 girişi için y 1 +y 2 çıkışı alınır. Taylor Serisi Açılımı-Tek değişkenli x 0 yapılan açılımdaki çalışma noktasıdır. x-x 0 değerinin küçük kademelerinde çalışma noktasının yansıması fonksiyona iyi bir yaklaşım gösterir. Taylor Serisi Açılımı-Çok değişkenli

14 14 x 0, y 0, yapılan açılımdaki çalışma noktasıdır. (x-x 0 ), (y-y 0 ) değerinin küçük kademelerinde çalışma noktasının yansıması fonksiyona iyi bir yaklaşım gösterir (yüksek dereceden terimler ihmal edilmiştir). Doğrusal Olmayan Yay Bileşen Kombinasyonu Örneği Karıştırıcı ve Boru
.")

15 15 Hidrolik Silindir Bileşen Kombinasyonu Örneği Bileşen Kombinasyonu Örneği

, D gecikmesi, beklenen cevap zamanıyla karşılaştırıldığında çok")
16 16 Model Basitleştirilebildi mi? Doğal frekans n beklenen çalışma frekanslarıyla karşılaştırıldığında çok yüksek ise sönümleme ne çok yüksek ne de çok düşük olur ( 1), D gecikmesi, beklenen cevap zamanıyla karşılaştırıldığında çok küçükse, Laplace Dönüşümlerine Olan İhtiyaç Diferansiyel bağıntıları basitleştirip birleştirerek kullanışlı hale getirir. Modelleri sadeleştirip kolaylaştırır. Sistem ve bileşenlerin blok diyagramlarının çiziminde kolaylık sağlar. Diferansiyel bağıntıların çözümünü kolaylaştırır (Çeşitli girişler için çıkışlar bulunur). Kararlılık analizi, frekans cevabı, vb. hesaplamalarda kolaylık sağlar. Denetim cihazı tasarımını kolaylaştırır.

17 17 TABLO-1.1 İdeal sistem elemanlarının temel özellikleri

18 18 2.BÖLÜMLE İLGİLİ PROBLEMLER 1) Bir sıvı ısıtma sisteminin matematik modelini kurunuz (sistemde üretilen ve depolanan ısının olmadığı kabul edilecek). 2)


19 19 BÖLÜM-3 LAPLACE DÖNÜŞÜMLERİ Bağıl olarak çözümü daha zor olan diferansiyel denklemler yerine daha kolay çözülebilen cebirsel bağıntılar Doğrusal diferansiyel denklemleri uygulama Fiziksel olarak gerçekleşebilen sinyal uygulaması Uygulama sırası: o Diferansiyel denklemin alınması o Yeni denkleme dönüştürme o Denklemi çözme veya daha ileri seviyede analiz etme Verilen bir zaman değişkeni; t ve zaman fonksiyonu; f(t) ise Yeni bir değişken; s olarak tanımlanır. s bir karmaşık değişkendir: s= +j F(t) den Laplace dönüşümü L[f(t)]= F(s) Laplace Dönüşümünün Tanımı s yeni karmaşık değişkendir: s= +j Gösterimi kolaylaştırmak için; Zaman fonksiyonunun bir sabit ile çarpımı İki zaman fonksiyonunun toplamı
 den Laplace dönüşümü L[f(t)]= F(s) Laplace Dönüşümünün Tanımı s yeni karmaşık değişkendir: s= +j Gösterimi kolaylaştırmak için; Zaman")

20 20 Birinci dereceden zamana bağlı türev Kısımlara bölerek entegre edilirse Birinci dereceden zamana bağlı türev + süreksizliktir Zaman fonksiyonunun türevi


21 21 Zaman fonksiyonunun ikinci derece türevi: Zaman fonksiyonunun daha yüksek türevleri Sıklıkla: başlangıç şartları=0 kabul edilir. Fonksiyon Onun türevleri Zaman gecikmesi Tanım:
22 22 Ancak Termal sistem Sıvı akış debisi: Q Yalıtım direnci: R Isı girişi: e(t) Sıcaklık farkı: (t)= 0 (t) - t e (t) Termal kapasite: C t Sıvının özgül ısısı: S f (t)= 0 (t) - t e (t) Enerji dengesi Laplace dönüşümü Yay-kütle-damper

23 23 Boru ve karışım vanası Gecikme işlemi Laplace Dönüşümü s yeni karmaşık değişken Dönüşüm: Diferansiyel denklemler Cebirsel denklemler Zaman fonksiyonları (adım, uyarı etkisi, sinüs, vb.) DC motor-yükseltici sistemi
: yükseltici giriş voltajı R: motor direnci L: motor endüktansı K e : ters EMK sabiti K v : takometre kazancı Motor-yükseltici denklemleri Dönüşüm")
24 24 Mekanik sistem değişkenleri (t): dönme konumu (t): dönme hızı T(t): motor momenti J: motor ataleti K t : moment sabiti Elektriksel sistem değişkenleri i(t): motor akımı e(t): yükseltici çıkış voltajı v(t): yükseltici giriş voltajı R: motor direnci L: motor endüktansı K e : ters EMK sabiti K v : takometre kazancı Motor-yükseltici denklemleri Dönüşüm Denklemleri

25 25 Birim adım fonksiyonu Birim tepki fonksiyonu

26 26 Hopital kuralının kullanımı Pay ve payda ayıracı t ile ilgilidir: Üstel fonksiyon

27 27 Doğrusal olmayan tank sistemi Vananın doğrusal olmayan davranışı: Vana akışında doğrusallaştırılmış model
 değişiklik olurmu? Çözüm gerekli!")
28 28 Doğrusallaştırılmış tank modeli Dönüştürülmüş tank sistemi modeli q i (t) deki değişimlere tank nasıl cevap verir? (t) değişiklik olurmu? Çözüm gerekli!
. Tüm başlangıç şartları sıfır olarak kabul edilir.")
29 29 BÖLÜM-4 TRANSFER FONKSİYONLARI Bir sistemin transfer fonksiyonu Laplace dönüşümünün çıkışı ile girişi arasındaki oran olarak tanımlanır. Doğrusal, sabit sistemlere uygulanır (doğrusal olmayan bir sistem zamanla değişen parametrelere sahiptir). Tüm başlangıç şartları sıfır olarak kabul edilir. Dinamik giriş-çıkışları tanımlar (sistemin iç yapısı ile ilgilenmez). DC motor-yükseltici sistemi Elektro-mekanik sistem Sistem transfer fonksiyonu Sistem model dönüşümü Sistem transfer fonksiyonu (çıkış/giriş) Transfer fonksiyonu tüm girişler için geçerlidir (yalnızca özel bir giriş için geçerli değildir)

30 30 Doğrusal olmayan tank sistemi Vananın doğrusal olmayan davranışı: Doğrusallaştırılmış tank modeli Çıkış iki girişin fonksiyonudur! Tank transfer fonksiyonu h(t) ve (t) arasındaki ilişki:

31 31 h(t) ve q i (t) arasındaki ilişki: BÖLÜM-5 DİFERANSİYEL DENKLEMLERİN ÇÖZÜMÜ Bileşen modellerinin Laplace dönüşümlerini ve giriş fonksiyonlarını alın. Bileşen modellerini bir sistem halinde birleştirin. Giriş fonksiyonlarının yerine dönüşümleri koyun. Sistem çıkışı için çözüm yapın. Çıkış için alınan zaman-alan çözümüne ters Laplace dönüşümü uygulayın. Laplace dönüşüm tablosu Kısmi kesirlere ayırma Ters Laplace Dönüşümü L -1 [F(s)]=f(t) Ters Laplace dönüşümü gerçekten bir integral değerlendirmesi sonucu bulunmuş değildir. Neyse ki, dönüşüm elde etmek için genelde Ters Dönüşüm eşsiz bir zaman fonksiyonudur. Böylelikle Laplace dönüşümlerinin bir tablosu her iki yöntemle kullanılır! Ters Laplace dönüşümü F(s) fonksiyonun ters dönüşümü genelde iki polinom oranı şeklinde olması beklenir. i ve n pozitif tamsayıdır. c ler ve b ler gerçek sayıdır. Ters dönüşüm zor gibi görünür. kısmi kesirler yardımıyla gruplara ayırarak ters dönüşüme daha kolay uydurulabilir. Kısmi kesirlere ayırma Payda faktörü Genişletilmiş F(s) faktörlerin toplamıdır.
32 32 TABLO-1.2 Laplace Dönüşüm Çiftleri Tablosu a ve C ler karmaşık sayılardır. Şayet karmaşıksa a ve C ler karmaşık eşlenik çiftler olarak görünür. Karmaşık eşlenik çiftler salınımlı çözümlere yardımcı olur. a k tekrarlanmayan faktörler var ise;
dir.")
33 33 Örnek: Ters Dönüşüm Laplace dönüşümleri tablosundan: Böylelikle ters dönüşüm F(s): F(s) dönüşümü için sistem diferansiyel denkleminin bir çözümü f(t)dir. Şayet tekrar eden ifadeler mevcutsa;
34 34 Tekrar eden ifadelere örnek Laplace dönüşümleri tablosundan; Ters dönüşüm; Doğrusal olmayan tank sistemi Vana akışının doğrusal olmayan davranışı:

35 35 Tank modelinin dönüşümü ve girişler Kararlı durum şartlarından önce t=0 kabulü yapın: t=0 için (t) nin küçük adımlı olduğunu kabul edin: Sistem çıkışının dönüşümü Sistem çıkışının ters dönüşümü Laplace dönüşüm tablosu kullanılarak;

36 36 Son Değer Teoremi Bir fonksiyonun son değerini bulun f( ) Sabit durum değeri Geçiş bölgesi dışındaki değer Tepki tamamlandığındaki değer F(s nin payda kökleri negatif gerçek değere sahipse genelde sınır mevcuttur. Bir kök sıfır olabilir. Başlangıç değeri teoremi Tank örneği: Başlangıç ve son değer Çözümün dönüşümü: burada:
: Final değeri (t=")
37 37 Çözüm: Tank örneği: Başlangıç değeri Tank örneği: Son değeri Tank örneği: Gözden geçirme Başlangıç değeri (t=0 + ): Final değeri (t= ):
38 38 5.BÖLÜMLE İLGİLİ SORULAR Aşağıda Laplace dönüşümü verilen y(t) fonksiyonlarının başlangıç ve final değerleri nedir? 1) 2) 3) 4) Aşağıdaki sistemde sıvı yüksekliği h(t) olup çıkış debisi q o (t) ve giriş debisi q i (t) arasındaki bağıntıyı çıkarınız. A: tankın yüzeyi (m 2 ), G v : Çıkış vanası katsayısı q o (t)=g v h(t), Tankta toplanan sıvı debisi q s (t) = q i (t) q o (t) q i A h G v q o
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI
 Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
EDUCATIONAL MATERIALS
 PROBLEM SET 1. (2.1) Mükemmel karıştırılmış, sabit hacimli tank, aynı sıvıyı içeren iki giriş akımına sahiptir. Her akımın sıcaklığı ve akış hızı zamanla değişebilir. a) Geçiş işlemini ifade eden dinamik
PROBLEM SET 1. (2.1) Mükemmel karıştırılmış, sabit hacimli tank, aynı sıvıyı içeren iki giriş akımına sahiptir. Her akımın sıcaklığı ve akış hızı zamanla değişebilir. a) Geçiş işlemini ifade eden dinamik
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
ÇEV 2006 Mühendislik Matematiği (Sayısal Analiz) DEÜ Çevre Mühendisliği Bölümü Doç.Dr. Alper ELÇĐ
 DEÜ Çevre Mühendisliği Bölümü Doç.Dr. Alper ELÇĐ") Giriş ÇEV 2006 Mühendislik Matematiği (Sayısal Analiz) DEÜ Çevre Mühendisliği Bölümü Doç.Dr. Alper ELÇĐ Sayısal Analiz Nedir? Mühendislikte ve bilimde, herhangi bir süreci tanımlayan karmaşık denklemlerin
Giriş ÇEV 2006 Mühendislik Matematiği (Sayısal Analiz) DEÜ Çevre Mühendisliği Bölümü Doç.Dr. Alper ELÇĐ Sayısal Analiz Nedir? Mühendislikte ve bilimde, herhangi bir süreci tanımlayan karmaşık denklemlerin
İÇİNDEKİLER. Bölüm 2 CEBİR 43
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
H1 - Otomatik Kontrol Kavramı ve Örnek Devreler. Yrd. Doç. Dr. Aytaç Gören
 H1 - Otomatik Kontrol Kavramı ve Örnek Devreler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04
H1 - Otomatik Kontrol Kavramı ve Örnek Devreler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
NOT: Toplam 5 soru çözünüz, sınav süresi 90 dakikadır. SORULAR VE ÇÖZÜMLER
 Adı- Soyadı: Fakülte No : Gıda Mühendisliği Bölümü, 2016/2017 Öğretim Yılı, Güz Yarıyılı 00391-Termodinamik Dersi, Dönem Sonu Sınavı Soru ve Çözümleri 13.01.2017 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20)
Adı- Soyadı: Fakülte No : Gıda Mühendisliği Bölümü, 2016/2017 Öğretim Yılı, Güz Yarıyılı 00391-Termodinamik Dersi, Dönem Sonu Sınavı Soru ve Çözümleri 13.01.2017 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20)
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
MÜHENDİSLİK ÖLÇÜMLERİNİN TEMEL ESASLARI
 MÜHENDİSLİK ÖLÇÜMLERİNİN TEMEL ESASLARI ÖLÇME SİSTEMLERİNİN TEMEL ÖZELLİKLERİ ÖLÇME SİSTEMLERİ Bütün ölçme sistemleri üç temel elemanı içerir. Transducer :Ölçülecek fiziksel değişkeni ortaya çıkaran hassas
MÜHENDİSLİK ÖLÇÜMLERİNİN TEMEL ESASLARI ÖLÇME SİSTEMLERİNİN TEMEL ÖZELLİKLERİ ÖLÇME SİSTEMLERİ Bütün ölçme sistemleri üç temel elemanı içerir. Transducer :Ölçülecek fiziksel değişkeni ortaya çıkaran hassas
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
MKT 210 OTOMATĠK KONTROL
 KOCAELĠ ÜNĠVERSĠTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MKT 210 OTOMATĠK KONTROL Doç.Dr. H.Metin ERTUNÇ 2012 BAHAR DÖNEMĠ ĠĢlenecek konular Kontrol sistemlerinin tanımı. Kontrol sistemlerinin önemi. Kontrol
KOCAELĠ ÜNĠVERSĠTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MKT 210 OTOMATĠK KONTROL Doç.Dr. H.Metin ERTUNÇ 2012 BAHAR DÖNEMĠ ĠĢlenecek konular Kontrol sistemlerinin tanımı. Kontrol sistemlerinin önemi. Kontrol
Akışkanların Dinamiği
 Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Kontrol Sistemleri (EE 326) Ders Detayları
 Ders Detayları") Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
Diferensiyel denklemler sürekli sistemlerin hareketlerinin ifade edilmesinde kullanılan denklemlerdir.
 .. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
.. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri
 Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI
 EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
Akışkanların Dinamiği
 Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
OTOMATİK KONTROL 18.10.2015
 18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Okut. Yüksel YURTAY. İletişim : (264) Sayısal Analiz. Giriş.
 Sayısal Analiz. Giriş.") Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
2 MALZEME ÖZELLİKLERİ
 ÖNSÖZ İÇİNDEKİLER III Bölüm 1 TEMEL KAVRAMLAR 11 1.1. Fizik 12 1.2. Fiziksel Büyüklükler 12 1.3. Ölçme ve Birim Sistemleri 13 1.4. Çevirmeler 15 1.5. Üstel İfadeler ve İşlemler 18 1.6. Boyut Denklemleri
ÖNSÖZ İÇİNDEKİLER III Bölüm 1 TEMEL KAVRAMLAR 11 1.1. Fizik 12 1.2. Fiziksel Büyüklükler 12 1.3. Ölçme ve Birim Sistemleri 13 1.4. Çevirmeler 15 1.5. Üstel İfadeler ve İşlemler 18 1.6. Boyut Denklemleri
DİNAMİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
1. Aşağıda verilen fiziksel büyüklüklerin dönüşümünde? işareti yerine gelecek sayıyı bulunuz.
 Şube Adı- Soyadı: Fakülte No: NÖ-A NÖ-B Kimya Mühendisliği Bölümü, 2016/2017 Öğretim Yılı, 00323-Akışkanlar Mekaniği Dersi, 2. Ara Sınavı Soruları 10.12.2016 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20) 5 (20)
Şube Adı- Soyadı: Fakülte No: NÖ-A NÖ-B Kimya Mühendisliği Bölümü, 2016/2017 Öğretim Yılı, 00323-Akışkanlar Mekaniği Dersi, 2. Ara Sınavı Soruları 10.12.2016 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20) 5 (20)
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
İ çindekiler. xvii GİRİŞ 1 TEMEL AKIŞKANLAR DİNAMİĞİ BERNOULLİ DENKLEMİ 68 AKIŞKANLAR STATİĞİ 32. xvii
 Last A Head xvii İ çindekiler 1 GİRİŞ 1 1.1 Akışkanların Bazı Karakteristikleri 3 1.2 Boyutlar, Boyutsal Homojenlik ve Birimler 3 1.2.1 Birim Sistemleri 6 1.3 Akışkan Davranışı Analizi 9 1.4 Akışkan Kütle
Last A Head xvii İ çindekiler 1 GİRİŞ 1 1.1 Akışkanların Bazı Karakteristikleri 3 1.2 Boyutlar, Boyutsal Homojenlik ve Birimler 3 1.2.1 Birim Sistemleri 6 1.3 Akışkan Davranışı Analizi 9 1.4 Akışkan Kütle
Küçük sinyal analizi transistörü AC domende temsilş etmek için kullanılan modelleri içerir.
 Küçük Sinyal Analizi Küçük sinyal analizi transistörü AC domende temsilş etmek için kullanılan modelleri içerir. 1. Karma (hibrid) model 2. r e model Üretici firmalar bilgi sayfalarında belirli bir çalışma
Küçük Sinyal Analizi Küçük sinyal analizi transistörü AC domende temsilş etmek için kullanılan modelleri içerir. 1. Karma (hibrid) model 2. r e model Üretici firmalar bilgi sayfalarında belirli bir çalışma
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1. Y. Doç. Dr. Güray Doğan
 ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
DİNAMİK - 1. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
Sistem Dinamiği. Bölüm 6. Elektrik ve Elektromekanik Sistemler. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
ELEKTRİK MOTORLARI VE SÜRÜCÜLER ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ
 BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
NOT: Toplam 5 soru çözünüz, sınav süresi 90 dakikadır. SORULAR VE ÇÖZÜMLER
 Adı- Soyadı: Fakülte No : Gıda Mühendisliği Bölümü, 2015/2016 Öğretim Yılı, Güz Yarıyılı 00391-Termodinamik Dersi, Bütünleme Sınavı Soru ve Çözümleri 20.01.2016 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20)
Adı- Soyadı: Fakülte No : Gıda Mühendisliği Bölümü, 2015/2016 Öğretim Yılı, Güz Yarıyılı 00391-Termodinamik Dersi, Bütünleme Sınavı Soru ve Çözümleri 20.01.2016 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20)
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY - 5 PSİKROMETRİK İŞLEMLERDE ENERJİ VE KÜTLE DENGESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY - 5 PSİKROMETRİK İŞLEMLERDE ENERJİ VE KÜTLE DENGESİ BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK 402
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY - 5 PSİKROMETRİK İŞLEMLERDE ENERJİ VE KÜTLE DENGESİ BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK 402
Bölüm 7 ENTROPİ. Bölüm 7: Entropi
 Bölüm 7 ENTROPİ 1 Amaçlar Termodinamiğin ikinci kanununu hal değişimlerine uygulamak. İkinci yasa verimini ölçmek için entropi olarak adlandırılan özelliği tanımlamak. Entropinin artış ilkesinin ne olduğunu
Bölüm 7 ENTROPİ 1 Amaçlar Termodinamiğin ikinci kanununu hal değişimlerine uygulamak. İkinci yasa verimini ölçmek için entropi olarak adlandırılan özelliği tanımlamak. Entropinin artış ilkesinin ne olduğunu
HATA VE HATA KAYNAKLARI...
 İÇİNDEKİLER 1. GİRİŞ... 1 1.1 Giriş... 1 1.2 Sayısal Analizin İlgi Alanı... 2 1.3 Mühendislik Problemlerinin Çözümü ve Sayısal Analiz... 2 1.4 Sayısal Analizde Bilgisayarın Önemi... 7 1.5 Sayısal Çözümün
İÇİNDEKİLER 1. GİRİŞ... 1 1.1 Giriş... 1 1.2 Sayısal Analizin İlgi Alanı... 2 1.3 Mühendislik Problemlerinin Çözümü ve Sayısal Analiz... 2 1.4 Sayısal Analizde Bilgisayarın Önemi... 7 1.5 Sayısal Çözümün
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Sinyaller ve Sistemler (EE 303) Ders Detayları
 Ders Detayları") Sinyaller ve Sistemler (EE 303) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Sinyaller ve Sistemler EE 303 Güz 3 0 2 4 7 Ön Koşul Ders(ler)i EE 206 (FD),
Sinyaller ve Sistemler (EE 303) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Sinyaller ve Sistemler EE 303 Güz 3 0 2 4 7 Ön Koşul Ders(ler)i EE 206 (FD),
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
FEN BİLİMLERİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 FEN BİLİMLERİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS SAYISAL YÖNTEMLER FM-223 2 / 2.YY 2 2+0+0 4 Dersin Dili : Türkçe Dersin Seviyesi : Lisans
FEN BİLİMLERİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS SAYISAL YÖNTEMLER FM-223 2 / 2.YY 2 2+0+0 4 Dersin Dili : Türkçe Dersin Seviyesi : Lisans
AKIŞKANLAR MEKANİĞİ. Doç. Dr. Tahsin Engin. Sakarya Üniversitesi Makine Mühendisliği Bölümü
 AKIŞKANLAR MEKANİĞİ Doç. Dr. Tahsin Engin Sakarya Üniversitesi Makine Mühendisliği Bölümü İLETİŞİM BİLGİLERİ: Ş Ofis: Mühendislik Fakültesi Dekanlık Binası 4. Kat, 413 Nolu oda Telefon: 0264 295 5859 (kırmızı
AKIŞKANLAR MEKANİĞİ Doç. Dr. Tahsin Engin Sakarya Üniversitesi Makine Mühendisliği Bölümü İLETİŞİM BİLGİLERİ: Ş Ofis: Mühendislik Fakültesi Dekanlık Binası 4. Kat, 413 Nolu oda Telefon: 0264 295 5859 (kırmızı
Otomatik Kontrol. Kontrol Sistemlerin Temel Özellikleri
 Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Sistem nedir? Başlıca Fiziksel Sistemler: Bir matematiksel teori;
 Sistem nedir? Birbirleriyle ilişkide olan elemanlar topluluğuna sistem denir. Yrd. Doç. Dr. Fatih KELEŞ Fiziksel sistemler, belirli bir görevi gerçekleştirmek üzere birbirlerine bağlanmış fiziksel eleman
Sistem nedir? Birbirleriyle ilişkide olan elemanlar topluluğuna sistem denir. Yrd. Doç. Dr. Fatih KELEŞ Fiziksel sistemler, belirli bir görevi gerçekleştirmek üzere birbirlerine bağlanmış fiziksel eleman
5. Boyut Analizi. 3) Bir deneysel tasarımda değişken sayısının azaltılması 4) Model tasarım prensiplerini belirlemek
 Bir deneysel tasarımda değişken sayısının azaltılması 4) Model tasarım prensiplerini belirlemek") Boyut analizi, göz önüne alınan bir fiziksel olayı etkileyen deneysel değişkenlerin sayısını ve karmaşıklığını azaltmak için kullanılan bir yöntemdir. Akışkanlar mekaniğinin gelişimi ağırlıklı bir şekilde
Boyut analizi, göz önüne alınan bir fiziksel olayı etkileyen deneysel değişkenlerin sayısını ve karmaşıklığını azaltmak için kullanılan bir yöntemdir. Akışkanlar mekaniğinin gelişimi ağırlıklı bir şekilde
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
Bölüm 4 KAPALI SİSTEMLERİN ENERJİ ANALİZİ. Bölüm 4: Kapalı Sistemlerin Enerji Analizi
 Bölüm 4 KAPALI SİSTEMLERİN ENERJİ ANALİZİ 1 Amaçlar Özellikle otomobil motoru ve kompresör gibi pistonlu makinelerde yaygın olarak karşılaşılan hareketli sınır işi veya PdV işi olmak üzere değişik iş biçimlerinin
Bölüm 4 KAPALI SİSTEMLERİN ENERJİ ANALİZİ 1 Amaçlar Özellikle otomobil motoru ve kompresör gibi pistonlu makinelerde yaygın olarak karşılaşılan hareketli sınır işi veya PdV işi olmak üzere değişik iş biçimlerinin
İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER
 İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER 1.1. Fiziksel Kanunlar ve Diferensiyel Denklemler Arasındaki İlişki... 1 1.2. Diferensiyel Denklemlerin Sınıflandırılması ve Terminoloji...
İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER 1.1. Fiziksel Kanunlar ve Diferensiyel Denklemler Arasındaki İlişki... 1 1.2. Diferensiyel Denklemlerin Sınıflandırılması ve Terminoloji...
2. İKİ BOYUTLU MATEMATİKSEL MODELLER
 . İKİ BOYULU MAEMAİKSEL MODELLER.. Genel Bilgiler Şimdi konform dönüşüm teknikleri ile çözülebilen kararlı durum ısı akışı elektrostatik ve ideal sıvı akışı ile ilgili problemleri göz önüne alacağız. Konform
. İKİ BOYULU MAEMAİKSEL MODELLER.. Genel Bilgiler Şimdi konform dönüşüm teknikleri ile çözülebilen kararlı durum ısı akışı elektrostatik ve ideal sıvı akışı ile ilgili problemleri göz önüne alacağız. Konform
Modelleme bir sanattan çok bir Bilim olarak tanımlanabilir. Bir model kurucu için en önemli karar model seçiminde ilişkileri belirlemektir.
 MODELLEME MODELLEME Matematik modelleme yaklaşımı sistemlerin daha iyi anlaşılması, analiz edilmesi ve tasarımının etkin ve ekonomik bir yoludur. Modelleme karmaşık parametrelerin belirlenmesi için iyi
MODELLEME MODELLEME Matematik modelleme yaklaşımı sistemlerin daha iyi anlaşılması, analiz edilmesi ve tasarımının etkin ve ekonomik bir yoludur. Modelleme karmaşık parametrelerin belirlenmesi için iyi
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri
 Kontrol Sistemleri") Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ
 MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
HİDROLİK. Yrd. Doç. Dr. Fatih TOSUNOĞLU
 HİDROLİK Yrd. Doç. Dr. Fatih TOSUNOĞLU Ders Hakkında Genel Bilgiler Görüşme Saatleri:---------- Tavsiye edilen kitaplar: 1-Hidrolik (Prof. Dr. B. Mutlu SÜMER, Prof. Dr. İstemi ÜNSAL. ) 2-Akışkanlar Mekaniği
HİDROLİK Yrd. Doç. Dr. Fatih TOSUNOĞLU Ders Hakkında Genel Bilgiler Görüşme Saatleri:---------- Tavsiye edilen kitaplar: 1-Hidrolik (Prof. Dr. B. Mutlu SÜMER, Prof. Dr. İstemi ÜNSAL. ) 2-Akışkanlar Mekaniği
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
NOT: Toplam 5 soru çözünüz, sınav süresi 90 dakikadır. SORULAR VE ÇÖZÜMLER
 Adı- Soyadı : Fakülte No : Gıda Mühendisliği Bölümü, 2014/2015 Öğretim Yılı, Güz Yarıyılı 00391-Termodinamik Dersi, Bütünleme Sınavı Soru ve Çözümleri 23.01.2015 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20)
Adı- Soyadı : Fakülte No : Gıda Mühendisliği Bölümü, 2014/2015 Öğretim Yılı, Güz Yarıyılı 00391-Termodinamik Dersi, Bütünleme Sınavı Soru ve Çözümleri 23.01.2015 Soru (puan) 1 (20) 2 (20) 3 (20) 4 (20)
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
Şekil 1.1 Genliği kuvantalanmamış sürekli zamanlı işaret. İşaretin genliği sürekli değerler alır. Buna analog işaret de denir.
 İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
5. Boyut Analizi. 3) Bir deneysel tasarımda değişken sayısının azaltılması 4) Model tasarım prensiplerini belirlemek
 Bir deneysel tasarımda değişken sayısının azaltılması 4) Model tasarım prensiplerini belirlemek") Boyut analizi, göz önüne alınan bir fiziksel olayı etkileyen deneysel değişkenlerin sayısını ve karmaşıklığını azaltmak için kullanılan bir yöntemdir. kışkanlar mekaniğinin gelişimi ağırlıklı bir şekilde
Boyut analizi, göz önüne alınan bir fiziksel olayı etkileyen deneysel değişkenlerin sayısını ve karmaşıklığını azaltmak için kullanılan bir yöntemdir. kışkanlar mekaniğinin gelişimi ağırlıklı bir şekilde
BÖLÜM 1: TEMEL KAVRAMLAR
 BÖLÜM 1: TEMEL KAVRAMLAR Hal Değişkenleri Arasındaki Denklemler Aralarında sıfıra eşitlenebilen en az bir veya daha fazla denklem kurulabilen değişkenler birbirine bağımlıdır. Bu denklemlerden bilinen
BÖLÜM 1: TEMEL KAVRAMLAR Hal Değişkenleri Arasındaki Denklemler Aralarında sıfıra eşitlenebilen en az bir veya daha fazla denklem kurulabilen değişkenler birbirine bağımlıdır. Bu denklemlerden bilinen
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
Kontrol Sistemleri Tasarımı
 Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
ERCİYES ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ SİVİL HAVACILIK ANABİLİM DALI YENİ DERS ÖNERİSİ/ DERS GÜNCELLEME
 / DERS GÜNCELLEME Dersin Kodu SHA 615 Dersin Adı İSTATİSTİKSEL SİNYAL İŞLEME Yarıyılı GÜZ Dersin İçeriği: Olasılık ve olasılıksal süreçlerin gözden geçirilmesi. Bayes kestirim kuramı. Büyük olabilirlik
/ DERS GÜNCELLEME Dersin Kodu SHA 615 Dersin Adı İSTATİSTİKSEL SİNYAL İŞLEME Yarıyılı GÜZ Dersin İçeriği: Olasılık ve olasılıksal süreçlerin gözden geçirilmesi. Bayes kestirim kuramı. Büyük olabilirlik
PROSES KONTROL DENEY FÖYÜ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret