İşaret İşleme ve Haberleşmenin Temelleri. Yrd. Doç. Dr. Ender M. Ekşioğlu
|
|
|
- Irmak Odabaşı
- 6 yıl önce
- İzleme sayısı:
Transkript
1 İşaret İşleme ve Haberleşmenin Temelleri Yrd. Doç. Dr. Ender M. Ekşioğlu
2 İşaretler: Bilgi taşıyan işlevler Sistemler: İşaretleri işleyerek yeni işaretler oluşturan yapılar İşaret: Bir ya daha fazla değişkene bağlı olarak değişen ve bilgi taşıyan bir işlev (fonksiyon). Sistem: İşaretleri, üzerlerinde değişiklikler yaparak yeni işaretlere dönüştüren her türlü yapı.
 yada daha çok boyutlu işaretler iki yada daha fazla bağımsız değişkene bağlı olarak tanımlanan işaretler, bir imge 2 B işarete, video işareti ise 3 B işarete örnek")
3 İşaretler 1 B (bir boyutlu) tek bir bağımsız değişkene bağlı olarak tanımlanan işaretler, bu bağımsız değişken genelde zaman olacaktır, ses yada konuşma işareti örnek verilebilir. 2 B (iki boyutlu) yada daha çok boyutlu işaretler iki yada daha fazla bağımsız değişkene bağlı olarak tanımlanan işaretler, bir imge 2 B işarete, video işareti ise 3 B işarete örnek verilebilir.

![Ayrık zamanlı İşaretler x[n] n ayrık bir değişken, örnek olarak](/docs-images/73/69181149/images/4-1.jpg "sadece tam sayı değerler alıyor İşaretin (işlevin) bağlı olduğu")
4 İşaretler için bir sınıflandırma yolu bağımsız değişkenin değerlerini aldığı kümeye göre sınıflandırmadır. Ayrık zamanlı İşaretler x[n] n ayrık bir değişken, örnek olarak sadece tam sayı değerler alıyor İşaretin (işlevin) bağlı olduğu bağımsız değişken ayrık değerler alır.
5 Sürekli zamanlı İşaretler x() t t sürekli bir değişken İşaretin (işlevin) bağlı olduğu bağımsız değişken sürekli değerler alır.
6 İşaretler için diğer bir sınıflandırma yolu işaret değerlerinin göre Ayrık değerli işaretler İşaret (işlev) ayrık değerler alır Sürekli değerli işaretler İşaret (işlev) sürekli değerler alır
7 Gerçek hayatta karşılaştığımız işaretler genelde sürekli zamanlı ve sürekli genliklidir, Bu çeşit işaretleri analog işaretler olarak adlandırıyoruz, Örnek: 1) Elektriksel işaretler (akım, gerilim, elektriksel alan ve manyetik alan büyüklükleri) 2) Mekanik işaretler (Basınç, hız, ivme gibi büyüklükler) Analog işaretler duyucu (sensör) ve dönüştürücü (transducer) yardımıyla elektriksel işaretlere dönüştürülebilir ve işlenebilirler. Analog işaret işleme analog elektriksel işaretler üzerinde yükselticiler (amplifiers), dirençler, sığaçlar (capacitance), endüktanslar vb. devre elemanlarından oluşan devrelerle (sistemlerle) işlemler yapmaya dayanır.
8 Analog işaret işlemenin dezavantajları: 1) Doğruluk sınırlı, bileşen toleransları, yükseltici doğrusalsızlığı gibi sebeplerle 2) Sınırlı tekrarlanabilirlik, bileşen toleransları ve sıcaklık, basınç gibi çevresel koşullar nedeniyle 3) Elektriksel gürültüye yüksek duyarlılık 4) İşlemleri gerçekleştirmede sınırlı dinamik aralık 5) Yapılan işlemleri değiştirmede zorluk 6) Doğrusal olmayan ve zamanla değişen işlemleri gerçeklemede zorluk 7) Analog işaretin saklanması ve geri alınmasında sınırlı doğruluk ve yüksek maliyet
 işaretler olarak adlandırılır.")
9 Sayısal İşaret İşleme: Analog işaretler örnekleme ve kuvantalama işlemleri gerçeklenerek ayrık zamanlı ve ayrık değerli işaretlere dönüştürülebilirler. Hem ayrık zamanlı hem de ayrık değerli olan işaretler sayısal (digital) işaretler olarak adlandırılır. Sayısal işaret işleme, işaretlerin sayısal (digital) hale getirilip üzerlerinde sayısal donanımlar (genel amaçlı bir bilgisayar yada özel amaçlı bir yonga) kullanılarak işlemler yapılmasıdır.
10 Bir DSP sistemini gerçekleyebilmek için aşağıdaki adımları gerçeklememiz gerekmektedir. 1) Analog işaretin sayısal işarete dönüştürülmesi, Analog sayısal (A/D) dönüştürücü 2) Sayısal işaret üzerinde gerekli işlemleri yapabilmek için bir sayısal işlemci 3) Sayısal işlenmiş işaret tekrar bir analog işarete geri döndürülmeli, Sayısal analog (D/A) dönüştürücü
11 Sayısal işaret işlemenin avantajları: 1) Sayısal işlemciler istenen her seviyeye kadar (en azından teorik olarak) doğruluk sağlayabilirler, bu sayısal kelime uzunluğu gerektiği şekilde arttırılarak sağlanır 2) Sayısal işlemciler gerçekleştirdikleri işlemleri hiç hatasız mükemmel şekilde tekrarlayabilirler (bozukluk olmadığı sürece) 3) Sayısal işlemcilerin elektriksel gürültüye duyarlılıkları çok düşüktür 4) Dinamik aralık istendiği şekilde değiştirilebilir (kayan nokta gösterilimi, floating point representation) 5) Sayısal işlemcilerin işlem hızları giderek artmaktadır, Moore kuralı, her 18 ayda birim alana döşenebilen transistör sayısı yaklaşık olarak ikiye katlanmaktadır
12 6) Sayısal işlemcilerin gerçekleştirdiği işlemler sadece yazılım değişiklikleri ile güncellenebilirler 7) Doğrusal olmayan ve zamanla değişen işlemleri gerçeklemek daha kolaydır. 8) Sayısal işaretlerin saklanması daha ucuz ve daha kolaydır. 9) Sayısal işaretler güvenlik için şifrelenebilir, hatalara karşı kodlanabilir bilgi kaybı olmaksızın ya da ayarlanabilen bir miktarda bilgi kaybına izin vererek sıkıştırılabilirler
13 Sayısal İşaret İşlemenin uygulama alanları: Biyomedikal uygulamalar: biyomedikal işaretlerin analizi, diyagnostik görüntüleme (MRI, CT, ultrasound) Çoğulortam (multimedia) uygulamaları: ses, görüntü, video işaretleri gibi işaretlerin oluşturulması, saklanması ve iletimi, Örnek: sayısal televizyon sistemleri, MP3 Görüntü ve video işleme: görüntü iyileştirme, kodlama, sıkıştırma, Örnek: JPEG, MPEG1, MPEG2, MPEG3, MPEG4 Haberleşme: sayısal haberleşme işaretlerinin kodlanması ve kod çözülmesi, kanal dengeleme uygulamaları, modemler, Konuşma uygulamaları: ses kodlama, sıkıştırma, sesyazı ve yazı ses dönüştürme teknikleri Radar, Sonar



14 SAYISAL GÖRÜNTÜ İŞLEME Hafta1: Sayısal Görüntü İşlemeye Giriş
15 Ders İçeriği Görüntü işleme nedir? Görüntü işleme tekniklerinin kullanma alanları Matlab görüntü işleme araç kutusu

16
17 Sayısal Görüntü İşleme Nedir? İmgenin Tanımı o İmge 2-D bir fonksiyondur : f(x,y). o x ve y spatial (uzaysal) koordinatlardır o f fonksiyonunun (x,y) noktasındaki genliği yoğunluk(intensity ) ya da imgenin (x,y) deki gri seviyesi olarak bilinir. Sayısal Görüntü (İmge) Tanımı o Eğer x ve y sonlu ve kesikli değerler ise, f(x,y) sayısal imge olarak tanımlanır o f(x,y) negatif değerler almaz. Sayısal Görüntü İşleme o Sayısal imgenin bilgisayar yardımıyla işlenmesidir Pixel in tanımı o Sayısal bir imgenin belli bir yer ve değere sahip elemanlarıdır
18 SAYISAL GÖRÜNTÜ NEDİR? Renkli Görüntü Üç fonksiyonla gösterilebilir. R(x,y): kırmızı bileşen G(x,y):yeşil bileşen B(x,y):mavi bileşen
19 Sayısal Görüntü İşleme Nedir? Sayısal görüntü işleme, sayısal görüntülerin bilgisayarla işlenmesidir. Sayısal görüntü, her birinin özel bir konumu ve değeri olan sonlu sayıdaki elemanlardan oluşmuştur. Bu elemanlar, resim elemanları, görüntü elemanları, pel, imgecik veya piksel olarak adlandırılır. Piksel terimi en yaygın kullanılanıdır.
 /")
 Gri Seviyeli görüntü I(")
20 Gri Seviyeli (Grayscale) / Renkli (RGB) Görüntü Renkli görüntü I( mn,,3) Gri Seviyeli görüntü I( mn, ) Lena görüntüsü
 /")
21 Gri Seviyeli (Grayscale) / Renkli (RGB) Görüntü

22 Sayısal Görüntü İşleme - Başlangıcı Sayısal İmgelerin ilk kullanılışı o Sayısal imgeler ilk olarak denizaltı kabloları aracılığı ile Londra New York arasında gönderilmiştir Bilgisayarların Sayısal İşaret İşlemede kullanımı Bilgisayarlar sayısal görüntü işlemede ilk olarak, Jet Propulsion Laboratuvarlarında ( Pasadena, California) televizyon kameralarından kaynaklanan çeşitli bozulmaları düzeltmek için kullanılmıştır.

23 Sayısal Görüntü İşleme - Başlangıcı Ay ın çekilmiş olan ilk resmi Amerikan uzay gemisi ( Ranger 7, 1964) tarafından çekilmiştir
24 Sayısal Görüntü İşlemenin Uygulama Alanları Tıbbi Uygulamalar Uzay Uygulamaları Dünya Kaynaklarının uzaktan izlenemsi Astronomi Makine Algısı
25 Sayısal Görüntü İşlemenin Uygulama Alanları Tıbbi Uygulamalar Biyomedikal görüntülerin işlenmesi Nükleer manyetik rezonans(nmr) ve ultrasonik taramada elde edilen tıbbi görüntülerin işlenmesi. Bu görüntüler hastalığı görüntülemek ve teşhis etmek, tümör, damar tıkanıklığı, kemiklerdeki kırıklar gibi hastalıkların anlaşılmasında kullanılır.


26 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler Kemik Taraması PET imgesi

 Göğüs X- Ray")
27 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler X-Ray Görüntüleme (a) Göğüs X- Ray Görüntüsü (b) Aort Anjiogram


28 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler Aortic angiogram Head CT.

29 Sayısal Görüntü İşlemenin Uygulama Alanları Coğrafi Bilimler Jeodezi, hava ve uydu görüntülerinden hava tahmini Yeryüzündeki doğal kaynakların izlenmesi, Coğrafi haritaların çıkarılması, Zirai ürünlerin tahmini, Ormanların gelişiminin izlenmesi, Hava durumu, Sel ve yangın kontrolü ve birçok çevresel uygulamalar


30 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler Ultraviole Bandında Görüntüleme Normal mısırın Floresan mikroskop imgesi Bozulmuş mısır imgesi



31 18 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler Görülebilir ve kızılötesi bantta görüntüleme Washington, D.C. Bölgesinin uzaydan çekilmiş resimleri

32 19 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler Mikrodalga bandında görüntüleme Güneydoğu Tibet dağlarının uzaydan çekilmiş radar imgesi


33 20 Sayısal Görüntü İşlemenin Uygulama Alanları - Örnekler Farklı görüntüleme teknikleri Ultrasound görüntüleme örnekleri

34 21 Sayısal Görüntü İşlemede Temel Adımlar Görüntü İyileştirme



35 22 Sayısal Görüntü İşlemede Temel Adımlar Gürültü Temizleme İmge İyileştirmesi Geometrik düzeltme Radyometrik düzeltme

36 23 Sayısal Görüntü İşlemede Temel Adımlar İmge Sıkıştırma Kayıpsız Sıkıştırma Kayıplı Sıkıştırma
37 24 Sayısal Görüntü İşlemede Temel Adımlar İmge Bölütleme
38 Sayısal İşaret ve Görüntüİşleme 2. Hafta Yrd. Doç. Dr. Tuba KURBAN
39 Görüntüİşleme Nedir? 1. İnsanların yorumlayabilmesi için görüntü bilgilerinin artırılması. 2. Otomatik makine algılama için görüntüyü daha uygun hale getirme Amaçlarından biri için görüntü doğasında değişiklik yapma işlemidir

40 Örnekler (1)

41 Örnekler (1)

42 Örnekler (1)

43 Örnekler (2)

44 Örnekler (2)
45 Görüntü Elde Etme ve Örnekleme

46 Görüntü Elde Etme ve Örnekleme
47 Görüntü Türleri İkili Her piksel 1 bit yer kaplar. 512x512 boyutlarında bir görüntü ne kadar alan kaplar

48 Görüntü Türleri Griseviye Her piksel 1 byte yer kaplar. 512x512 boyutlarında bir görüntü ne kadar yer kaplar

49 Görüntü Türleri Renkli Her piksel 3 byte yer kaplar. 512x512 boyutlarında bir görüntü ne kadar yer kaplar
50 Bölüm 2 - Noktasal İşlemleri Herhangi bir görüntü işleme uygulaması piksel gri değerleri üzerinde dönüşüm yapar. Bu dönüşümü yapmak için gerektirdiği bilgiye bağlı olarak görüntü işleme uygulamaları 3 sınıfta incelenebilir: 1. Dönüşümler: Piksel değerleri başka bir domende ifade edilir. Fourier dönüşümü gibi. Tüm görüntü tek bir büyük blok gibi düşünülür. 2. Bölgesel İşlemler: Bir pikselin gri değerini değiştirmek için komşu piksellerden faydalanılır. 3. Noktasal İşlemler: Piksel yeni gri değeri için sadece eski değerinden faydalanılır. Basit işlemlerdir. Genellikle ön işleme için gereklidir
51 Tamamlayıcı Not Uzaysal domain (Spatial Domain): Günlük hayatta kullandığımız sayısal resimlerin oluşturulduğu domaindir. Bu domaindeki resimlerin pixelleri doğrudan doğruya işlenebilir. Frekans domain(frequency domain ): Görüntünün birçok farklı frekanslı bileşenden oluştuğu kabul edilir. Uzaysal domaindeki görüntü fourier v.b dönüşümü ile frekans domanine çevrilir. Burada işlenip ters dönüşüm yapılır.
52 Uzaysal Domain de görüntü işlemleri Uzaysal domain teknikleri, bir görüntünün pikselleri üzerinde doğrudan işlem yapar. Bu domendeki işlemler aşağıdaki denklemle ifade edilir. g(x, y) = T [f(x, y)] Burada f(x, y) giriş görüntüsüdür. g(x, y) ise çıkış (İşlenmiş ) görüntüsüdür. T ise f de belirli bir (x,y) komşuluk ilişkisi bölgesinde işlem yapan bir operatördür. Örneğin T operatörü; K görüntülerinde gürültü azaltmak için, bir görüntü seti işlemi olarak ta çalışabilir.
53 T ile belirtilen operasyonlar, Noktasal,Lokal(yerel)ve Global olarak yapılabilir. Noktasal Operasyon: Sadece 1x1 lik bölgede yapılan işlemlerdir. Nokta operasyonlarında, bir resimdeki her pikselin gri seviyesi yalnızca onun orijinal gri seviyesinden(tonundan) hesaplanır. Bu sebeple bu işlemlere piksel değeri haritalama veya griton değişikliği (modification) gibi isimler verilir. Nokta operasyonları genellikle resim onarımı (manipulation) için kullanılır. Mesela, bir resmin kontrastının yükseltilmesi gibi. Nokta operasyonları sıfır hafıza operasyonlarıdır. Bölgesel (lokal-komşuluk ilişkili) işlemlerde merkez pikselin değeri komşu piksellerin değeri ile belirlenir. Filitreleme işlemlerinde çok kullanılır. Global işlemlerde ise Domain dönüşümü ( uzaysaldan frekans domanine veya tersi) yapılarak image üzerinde işlem yapılır.
54 Bir piksel (x,y) in komşuluk bölgesi veya komşuluk ilişkisi için; merkezi (x,y) olan kare, dikdörtgen tanımlama kullanılır. Bu bölgenin merkezi,pikselden piksele hareket ettirilerek (Her yöne), etrafındaki farklı komşuları içine alır. T operatörü herbir lokasyona (x,y) uygulanarak lokasyonda işlenmiş g(x,y) çıkışı elde edilir. En küçük lokasyon (komşuluk ilişkisi-bölgesel) resim içindeki 1x1 lik bölgedir. Bu bölge içinde yapılan işlemlerde (çalışılan pikselde) diğer piksellerin hiçbir etkisi olamaz. Yani o tek piksele yapılan işlemde komşu piksellerin rolü olamaz. Bu tür işlemlere Noktasal işlemler denir. *** Dikkat Burada T yapılan işlemi belirtir. Yani her piksele; komşuluk ilişkisine göre gezilerek T nin belirttiği işlem yapılır.
55 Kontrast Nedir? Kontrast görüntüdeki en parlak bölüm ile en karanlık bölüm arasındaki farka denir. Siyah ve beyaz arasındaki kontrast aralığı genişledikçe, iki uç arasındaki gri tonlar ya da ara seviyeler daha rahat görülür. Aradaki değer ne kadar fazla olursa görüntünün canlılığı o kadar iyi olur
56 Aritmetik İşlemler Her bir piksele sabit bir değer eklenebilir veya çıkarılabilir. Pikseller bir sabitle çarpılabilir
57 Aritmetik İşlemler
58 Aritmetik İşlemler
59 Aritmetik İşlemler

60 Aritmetik İşlemler

61 Negatif Alma
62 Negatif Alma Görüntünün sadece bir kısmının negatifi alınabilir. Örneğin gri değeri 128 ve üstü olanların veya tam tersi bir durumda olabilir
63 Histogram Bir gri değerin görüntüde kaç tane olduğunu gösteren grafiktir. Görüntü hakkında bilgi vermesi açısından önemlidir. Karanlık bir görüntüde gri değerler histogramın alt ucunda, Aydınlık bir görüntüde gri değerler histogramın üst ucunda, İyi kontrastlı bir görüntüde ise, gri değerler aralıkta düzgün şekilde dağılır
64 Histogramdan elde edilen bilgiler Bir görüntünün histogramı, o görüntü hakkında önemli bilgiler verir. Önemlileri aşağıdadır. Koyu (Karanlık) bir görüntünün histogram grafiğinin düşük gri seviye bölgesine yığılacağı açıktır. Parlak (Açık renk) düzgün bir görüntünün histogram grafiğinin büyük gri seviye bölgesine yığılacağı açıktır. Eğer histogram bir bölgeye yığılmış ise ( yani gri sviye ekseninin belirli bir bölgesine) bu görüntünün kontrastı kötüdür denir. İyi kontraslı bir resmin histogram grafiği tüm gri seviye değerlerine eşit yayılmış olduğunu açıklar.

65
66 Genelde küçük yayılım gösteren histogramların kontrastı düşüktür, daha geniş alana yayılmış olan histogramların kontrastı daha yüksektir. Aralığın aşağı sonunda sıkışmış olan histogram koyu bir görüntüye ait olurken, aynı aralığın yukarı sonunda gruplanmış olan histogram parlak bir görüntüye aittir. Histogram aynı zamanda, daraltma, genişletme veya kaydırma işlemleri için bir karşılık düşürme fonksiyonu ile de değiştirilebilir. Histogram genişletme ve daraltma gri seviyesi değişimleri biçimindedir ve bazen histogram boyutlandırma olarakta adlandırılır.

67 Karşıtlığı düşük Karşıtlığı yüksek
68 Histogram Germe
69 Histogram Germe
70 Histogram Germe 5-9 aralığındaki gri değerleri 2-14 aralığına çekmek için aşağıdaki lineer fonksiyon kullanılabilir. Burada i pikselin orijinal değeri j ise dönüşüm sonrasındaki değeridir. j = YENİ ESKİ mak mak YENİ ESKİ min min ( i ESKİ ) + YENİ min min
71 Histogram Germe İşlem Sonucu Yeni Histogram
72 Histogram Eşitleme Historam germenin; bir kullanıcı girişine ihtiyaç duyma gibi bir dezevantajı vardır. Histogram eşitleme ise otomatik bir presedürdür. (Aslında histogram eşitleme genel anlamada histogram germe kapsamına sokulabilir. Fakat germede parçaparça linerer veya değişik fonksiyonlar kullanmak gerekirken, eşitlemde otomatik işlem yapılır.) İdeal olarak Histogram eşitleme; Giriş histogramını, her gri seviyesinde eşit piksel sayısına sahip bir histograma dönüştürme işlemi gibi düşünülebilir. Bu pratikte mümkün değildir. Bu yöntem histogramı dar olan resimler ya da resim içindeki bölgeler için daha iyi sonuç verir. Yani Histogram eşitleme renk değerleri düzgün dağılımlı olmayan resimler için uygun bir görüntü iyileştirme metodudur. Resmin tümüne uygulanabileceği gibi sadece belli bir bölgesine de uygulanabilir. Tüm resme uygulanırsa global histogram eşitleme, resmin belli bir bölgesine uygulandığında ise lokal histogram eşitleme adını alır.

73 Histogram eşitlemenin özeti Uygulanışı: 1-Resmin histogramı bulunur (her gri seviye için piksel sayısı grafiği). 2-Histogramdan yararlanılarak kümülatif histogram bulunur. Kümülatif histogram, histogramın her değerinin kendisinden öncekiler ve kendisinin toplamı ile elde edilen değerleri içeren büyüklüktür. 3-Kümülatif histogram değerleri normalize edilip (toplam piksel sayısına bölünerek), yeni resimde olmasını istediğimiz max. renk değerleri ile çarpılır, çıkan değer tam sayıya yuvarlatılır. Böylelikle yeni gri seviye değerleri elde edilmiş olur. 4- Eski (Orijinal) gri seviye değerleri ile; 3.adımda elde edilen gri seviye değerleri biribirine karşılık düşürülür ve yeni histogram grafiği çizilir. n: giriş görüntüsündeki toplam piksel sayısı (n 0 +n 1 +.+n L-1 = n) n j (n k ): j. gri seviyedeki piksel sayısı, L: mümkün olan (veya istenilen) toplam gri seviye sayısı( 8 bit renk derinliğinde 255 v.b) s k : Daha iyi kontraslı bir görüntü elde etmek için gri seviye dönüşüm değeri.
74 ÖRNEK: Gri seviye i : (j. Gri değerli piksel sayısı) n i : Yukarıda, renk derinliği 4 bit olan gri seviyeli bir görüntünün histogram tablosu görülmektedir. Bunun histogram grafiği ise aşağıdaki şekildedir. (Toplam piksel sayısı n=360, istenen gri seviye L=16)
75 Buna göre aşağıdaki denklemden; gri seviye değerlerini tek tek hesaplarsak;

76 Histogram Eşitleme Amaç: İmgedeki düşük görünürlüğü iyileştirmek. Olasılık dağılımına bağlı olarak doğrusal olmayan dönüşüm gerçekleştirilir. Bu sayede, bulunma olasılığı yüksek pikseller arası fazlaca açılırken, düşük olasılıklı seviyeler birbirine daha yakın hale gelir.

77

78 Örnek: Görüntü bloğu cdf
79 Sayısal İşaret ve Görüntü İşleme 4. Hafta Matlab Uygulama Eşikleme (thresholding) ve Bit Düzlem Dilimleme Yrd. Doç. Dr. Tuba KURBAN
80 Görüntü Eşikleme Bu fonksiyon genellikle gri tonlu bir görüntüden, ikili görüntü oluşturmak için kullanılır. Renkli görüntülerle de kullanılabilir. Kaynak görüntünün piksel değerlerini çok büyük ya da çok küçük değerlere filtreler.
81 Gri Görüntüler Üzerinde Eşikleme Test için gri seviye görüntü alınmaktadır. imge = imread( cameraman.tif'); imshow(imge);
82 im2bw Fonksiyonu ile Eşikleme im2bw fonksiyonu parametre olarak bir eşikleme sınır değeri alır. Sınır değerini ister deneme yanılma ile, istersek histogram inceleme ile bulunabilir. Optimum bir eşik değeri için görüntünün histogramını incelemek daha faydalı olacaktır.
83 im2bw ile Eşikleme Önce elimizdeki gri görüntüye 0.5 sınır değeri ile eşikleme yapalım. imge2 = im2bw(imge,0.5); imshow(imge2),title('eşiklenmiş Görüntü')
84 Graythresh Fonksiyonu ile Eşik Değerinin Alınması Şimdi Matlabdatanımlı graythresh fonksiyonunu çağırarak elimizdeki görüntü için otomatik olarak ideal bir eşik sınırı elde etmeye çalışalım. Graytrash histogram bazlı bir yöntemdir. Bu yöntemde algoritma önce görüntünün histogramını hesaplar, ardından otomatik bir threshold değeri döner.
85 Graythresh Fonksiyonu ile Eşik Değerinin Alınması Esikdegeri=graythresh(imge) Esikdegeri= belirlenir. (Daha önce alınan cameraman.tif görüntüsü için) Buradan çıkar değer bizim belirlediğimiz yaklaşık 0.29 değer uzaklığında. Otomatik bulunan bu değerle eşikleme yapılırsa.
; Figure,")
86 im2bw ile Eşikleme imge2 = im2bw(imge,esikdegeri); Figure, imshow(imge2)
 % Ekrana sadece 0.")
87 İlişkisel Operatörler ile Manuel Eşikleme imge = im2double(imge); imshow(imge>0.5) % Ekrana sadece 0.5 değerinden yüksek pikselleri getirir, diğerlerini 0 aeşitler.
88 Döngü ile Matlab de Eşikleme I=imread('cameraman.tif'); for i=1:size(i,1) for j=1:size(i,2) if I(i,j)>120 I2(i,j)=255; else I2(i,j)=0; end end end imshow(i), figure(), imshow(i2)
89 Bit Düzlem Dilimleme 8 bitlik bir gri r esmi alarak bu resmin her değerli bitinin etkisini görmek amacıyla kullanılır. Eğer seçilen değerdeki bit 1 ise 255 renk değeri 0(sıfır) ise 0 (sıfır) renk değeri verilerek her bit için yeni bir Siyah Beyaz resim elde edilecektir. Böylece her bit değerinin resme yaptığı etki belirlenmiş olur.
90 Bit Düzlem Dilimleme Burada amaç gri seviye görüntüyü değil, her bir bitin görüntüye olan katkısını vurgulamaktır. 8 bitlik bir görüntüyü düşünecek olursak bit düzlemleri 0 (en az öneme sahip bit LSB (least signitificant bit)) 7 (en fazla öneme sahip bit MSB) arasında değişir. 0. bit düzlemi görüntüdeki tüm LSB bitlerini içerir. 7. bit düzlemi ile görüntüdeki tüm MSB bitlerini içerir.
91 Bit Düzlem Dilimleme Bir sayısal görüntüyü bit düzlemlerine ayırma işlemi her bir bitin önemini analiz etmek için önemlidir. LSB gibi görüntüye daha az etkisi olan bitler görüntü sıkıştırma, veri gizleme gibi uygulamalar için kullanılabilir.
92 Bit Düzlem Dilimleme c=imread('cameraman.tif'); %görüntüyü oku imshow(c); cd=double(cd); c0=mod(cd,2); %lsb bit %bit düzlemleri hesapla c1=mod(floor(cd/2),2); c2=mod(floor(cd/4),2); c3=mod(floor(cd/8),2); c4=mod(floor(cd/16),2); c5=mod(floor(cd/32),2); c6=mod(floor(cd/64),2); c7=mod(floor(cd/128),2); figure, imshow(c0); % bit düzlemleri göster figure, imshow(c1); figure, imshow(c2); figure, imshow(c3); figure, imshow(c4); figure, imshow(c5); figure, imshow(c6); figure, imshow(c7); cc=2*(2*(2*(2*(2*(2*(2*c7+c6)+c5)+c4)+c3)+c2)+c1)+c0; %orjinal görüntü bit düzlemlerden elde edilebilir. imshow(uint8(cc));
93 0. bit düzlemi 1. bit düzlemi 2. bit düzlemi 3. bit düzlemi 4. bit düzlemi 5. bit düzlemi 6. bit düzlemi 7. bit düzlemi

94 Bit düzlemlerden elde edilen görüntü
95 KOMŞULUK İLİŞKİLİ İŞLEMLER (UZAYSAL FİLİTRELER) Noktasal işlemler imgedeki her piksele, diğer piksellerden bağımsız olarak y=f(x) işleminin uygulanışıydı. Komşuluk ilişkili işlemler (Bölgesel İşlemler) ise; Noktasal işlemlerin genişletilerek y=f(x) fonksiyonunu her bir pikselin komşuluk ilişkilerine göre merkez piksele uygulamaktır. Noktasal işlemlere göre aradaki fark; her bir piksele bağımsız olarak işlem yapılması yerine, merkez pikselin yeni değeri hesaplanırken komşu piksellerinde göz önüne alınmasıdır; Komşuluk ilişkili işlemler aşağıda tanımlanan 4 adımdan oluşur. Bir merkez nokta tanımlamak (x,y) Bu merkez noktasının yeni değerini elde etmek için, sadece önceden tanımlanmış komşuların piksellerini de içeren bir operasyon yapmak. O noktadaki (Merkez noktadaki) işlemin o operasyonun cevabı olmasına izin vermek; İmgedeki her nokta için bu işlemi tekrarlamak (Merkez noktayı kaydırma). 2
96 Bölgesel işlemlerin amacı komşu piksellerin gri tonlarını vurgulamak veya görünmesine engel olmaktır. Bu işlem şekilde görülmektedir. Merkezi piksel etrafında tanımlanan komşuluğa maske veya pencere denir. Bütün resmin işlenmesi için, maskenin adım adım kaydırılarak resmin tamamını taraması gerekir ( Bu işlem Merkez noktayı kaydırma işlemidir. Yani bir görüntüdeki herbir piksel için bir tane olacak şekilde yeni komşuluklar oluşturma işlemidir.). Bu işlem resmin sol üst köşesinden başlar. Yeni griton hesaplandıktan sonra maske (pencere) bir piksel sağ tarafa kaldırılır. Yeniden hesaplanır ve aynı işlemlere devam edilir. Satırın sonuna gelince, işlemleri bir sonraki satırın başından devam edilir. a)belirli bir algoritma ile pencere içerisindeki gritonlar işleme tabi tutulur ve sonuç resimde aynı pozisyona atanır. b)pencere adım adım kaydırılarak resmin tamamı taranır. İlgilenilen pikselin resmin sınırlarına ulaşmadığı açıkça gözükmektedir. Bu yüzden resim bölgesel işlemlerden dolayı küçülür. Genellikle bu küçülme önemli değildir. Fakat kenar piksellere griton verilmediğinden emin olunması gerekir. Böyle problemlere engel olmak için başlangıçta sonuç resmin bütün piksellerine 0 değeri atanmalıdır. 3
97 KOMŞULUK İLİŞKİLİ İŞLEMLER (2) Bölgesel resim işlemenin iki önemli kuralı; 1-Sonuç resim, kaynak resimden ayırt edilmeli. 2-Bir işleme başlamadan önce sonuç resmin bütün değerlerine 0 atanmalı. Komşuluk ilişkili işlemler için en uygun yol; uygun bir maske (filtre maskesi-pencere ) oluşturup bu maskeyi tüm görüntü üzerinde hareket ettirerek y=f(x) fonksiyonunu uygulamaktır. (Bu maske genellikle, kenarları tek sayıda piksellerden oluşturulmuş dikdörtgen şekildir.) Bu maske ve fonksiyonun kombinasyonuna Filtreleme denir. (Filtreleme işlemi çoğu literatürde komşuluk ilişkili İşlemlerin yerine kullanılır) Eğer pikselde yeni gri seviye oluşturma fonksiyonu lineer ise ve maskedeki tüm gri seviye değerleri için lineer uygulanıyorsa bu filtre, Lineer Uzaysal Filtre (Linear Spatial Filter) dir. Üç klasik bölgesel filtreleme vardır. 1- Griton (Gri seviye) düzgünleştirme (grey level smoothing - Yumuşatma), 2- Griton farklılıklarını vurgulamak (emphasizing grey level differences) 3- Griton geçişlerini keskinleştirmek (sharpening grey level steps - Keskinleştirme). 4
98 LİNEER UZAYSAL FİLTRENİN YAPISI 3x3 lük bir maske ve onunla ilgili komşuluk ilişkili bölge altındaki pikseller resimde görülmektedir. Lineer uzaysal filtrelemenin daha iyi açıklanabilmesi için iki önemli kavram vardır. Korelasyon ve Konvolüsyon. Korelasyon; maske w nin f görüntü dizisinden geçirilme işlemidir. Konvolusyon ; maskenin 180 döndürülüp aynı işlemin yapılma sürecidir. 5
99 İMAGE FİLTRELEME Filtreleme resmin üzerinde bir filtre varmış gibi düşünüp her piksel değerinin yeniden hesaplanmasıdır. Filtreler sayesinde girdi resminden yeni resim değişik efektler verilerek elde edilir. Filtreleme işlemi aşağıdaki formülle elde edilir. Burada m (s,t) filtre matrisidir (ağırlıklar matrisi-kernel - Maske). P (i,j) filtrelenecek görüntünün matrisidir. Y(i,j) elde edilecek yeni görüntünün matrisidir ( Bu formül 2 boyutlu korelasyon formülü gibi yorumlanabilir ). Burada filtre matrisimzi 3 x5 boyutunda bir matris olup, merkez pikseli, yeni değeri hesaplanacak pikselin üzerine gelecek şekilde konumlandırılıp, denkleme göre yeni değerler hesaplanır. Maske p(i,j) matrisinin tüm elemanlarını kapsayacak şekilde gezdirilerek, yeni piksel değeri kendisinin ve komşu elemanların oluşturacağı ağırlıklar toplamı şeklinde bulunur. 11
100 Uzaysal Filtre işlemini gerçekleştirmek için 3 adım gerekir. 1-Maskeyi (Filtreyi), çalışılacak piksel merkeze gelecek şekilde konumlamak. 2- Maskenin tüm elemanları ile ilgili pikselle komşuluk ilişkisi olan piksellerin çarpılması 3-çarpımların toplanması işlemi. Bu işlem tüm imgedeki tüm pikseller için gerçekleştirilir. 12
101 Aşağıdaki denklem iki boyutlu konvolüsyonu ifade ederler. Buna göre f(x,y) orijinal image, h(i,j) ağırlık (filtre-maske-impulse yanıtı) matrisidir. f (x,y) ise elde edilen yeni imagedir. 14

102 Konvolüsyon; yumuşatma, keskinleştirme, kenar belirleme gibi görüntü işleme fonksiyonlarını gerçekleştirmede çok sık kullanılmaktadır. Konvolüsyonda bir pikselin yeni değeri kendisinin ve çevresindeki piksellerin ağırlıklı ortalaması ile bulunmaktadır. Konvolüsyon şablonu (Filtre matrisi-kernel) uygulamaya göre farklı boyutlarda olabilmekle beraber genelde 3x3 lük bir matristir. 15
103 Örnek: A giriş görüntüsünün h kerneli ile konvolüsyonu sonucu oluşan çıkış görüntüsünün (2,4) pikselinin değerini hesaplayalım: Çözüm: 1. h kernelini yatay ve düşey eksende 180 derece döndür. 2. h ın merkez elemanı A(2,4) noktasına çakışacak şekilde kerneli kaydır. 3. A ve h daki karşılıklı elemanları çarp ve hepsini toplayarak (2,4) pikselindeki çıkış değerini bul. 16
104 ÖRNEK DEVAM Döndürülmüş kernel değerleri Giriş görüntüsünün değerleri Çıkışını bulmak istediğimiz piksel (2,4) pikselinin çıkışı


105 BAZI ÖNEMLİ LİNEER UZAYSAL FİLTRELER Gaussian Blur, bulanıklaştırma derecesini ayarlamamıza olanak vererek görüntünün hafifçe yumuşatılmasından tüm görüntüyü kalın bir sisle kaplamaya kadar değişen efektler yaratır. Adını, renk değerlerinin değişimini gaussian çanı denilen eğriyle eşleştirmesinden alır. 18
. Diğer gritonlar gürültü olarak yorumlanırsa yapılacak iş ya onları yok etmek veya diğer bir deyişle iki bölgeyi elde etmektir.")

106 GRİTON DÜZGÜNLEŞTİRME (GREY LEVEL SMOOTHING) LİNEER FİLTRELERİ NORMAL ORTALAMA (TEMEL BLURRİNG (BULANIKLAŞTIRMA)) FİLTRE Aşağıdaki kaynak resim iki bölgeden oluşmaktadır: Karanlık kısım (griton 1) ve aydınlık kısım (griton 10). Diğer gritonlar gürültü olarak yorumlanırsa yapılacak iş ya onları yok etmek veya diğer bir deyişle iki bölgeyi elde etmektir. En basit düzgünleştirme metodu ortalama işlemidir. kaynak resme ortalama işlemi uygulanarak elde edilen sonuç resmi yanda görülmektedir. Uygulanan maskenin boyutları 3x3 tür. Maske içerisindeki piksellerin gritonları toplanıp 9 a bölünür. Açıkça görüleceği üzere gürültü pikselleri gritonları arzulanan griton değerlerine yaklaştırıldı. Buna rağmen kaynak resimdeki bölgeler arasındaki dik olan geçişi yassılaştı (bulanıklaştı). Pozitif veya negatif etki olarak bunun kıymeti uygulamaya bağlıdır. 19

107 GAUSSİAN BLURRİNG FİLTRE (AĞIRLIKLI ORTALAMA) Bu durumda, maske içerisinde ki gri tonlar belirli ağırlıklarla (coefficients (kat sayısı) ) çarpılır. Şekilde Gausian alçak geçiren filtre ve normal ortalamanın ağırlıklarını gösterilmektedir. Normal ortalama operatörü (3x3 maske) durumunda, maske içerisindeki gritonlar eşit ağırlıklıdır (yani ağırlıklar 1 değerine eşittir). Maskenin şeklinden dolayı bu maskeyi kullanan filitreye kutu filitre denir. Gaussian alçak geçirenin düzgünleştirme etkisi kutu filtreninkinden biraz daha iyidir. Fakat griton basamaklarının yassılaştırma problemi bunda da mevcuttur. 20
, g filtrelenmiş sonuçtur. Diğer parametreler ise tabloda gösterilmektedir.")
108 LİNEEER UZAYSAL FİLTRELER İÇİN MATLAB FONKSİYONLARI Burada f giriş görüntüsü, w filtre maskesi(kernel), g filtrelenmiş sonuçtur. Diğer parametreler ise tabloda gösterilmektedir. 21
![ÖRNEK: ORTALAMA FİLTRE >> X=[ZEROS(256,256) ONES(256,256);ONES(256,256) ZEROS(256,256)]; >> Z=DOUBLE(X); >> İMSHOW(Z) >>](/docs-images/73/69181149/images/109-0.jpg "X=[ZEROS(256,256) ONES(256,256);ONES(256,256) ZEROS(256,256)]; >> Z=DOUBLE(X); >> W=ONES(31); >> GD=İMFİLTER(Z,W); >>")
109 ÖRNEK: ORTALAMA FİLTRE >> X=[ZEROS(256,256) ONES(256,256);ONES(256,256) ZEROS(256,256)]; >> Z=DOUBLE(X); >> İMSHOW(Z) >> X=[ZEROS(256,256) ONES(256,256);ONES(256,256) ZEROS(256,256)]; >> Z=DOUBLE(X); >> W=ONES(31); >> GD=İMFİLTER(Z,W); >> İMSHOW(GD,[]) 22
110 ÖNEMLİ NOT-1 2 boyutlu görüntülerin filtrelenmesi için diğer bir fonksiyon ise filter2 fonksiyonudur. Bu fonksiyon aşağıdaki gibi kullanılır. Sonuç matrisinın veri tipi double dır. >> c = filter2(filter, image, shape) Filter parametresi; istenen filtrelemeyi (filtre tipini), İmage parametresi; filtrelenecek image i, Shape parametresi;(same, full,valid olabilir.) same (filtrelenmiş görüntü orijinal görüntü boyutundadır) Full (Filtrelenmiş görüntü paddingden dolayı orijinal imajdan daha büyük boyutludur.) valid (Filtrelenmiş görüntü orijinal görüntüden küçüktür, Çünkü işlemlerden kenar pikseller etkilenmez). 24
111 DOĞRUSAL OLMAYAN UZAYSAL FİLTRELER (NONLİNEER SPATİAL FİLTERS) Komşuluk ilşikili Doğrusal olmayan filtreleme operasyonları m n boyutlu filtre matrisinin merkez noktasının kaydırılması işlemidir. Bu haliyle komşuluk ilişkili doğrusal uzaysal filtreleme ile aynıdır. Doğrusal olmamanın anlamı her merkez nokta pikseline aynı işlemin uygulanmamasından kaynaklanır. Örneğin; herhangi bir merkez nokta pikselini komşu piksellerdeki en büyük piksel değerine eşitleme işlemi bir nonlineer filtreleme işlemidir. Daha az kullanılan bir tarif ise; maskenin nonlineer olmasıdır. Esas olan merkez piksellerinyeni değerlerinin bulunması için nonlineer işlemlerin yapılmasıdır. 25
 Griton basamaklarını koruyan çok basit")


112 MİNİMİZE OPERATÖRÜ (MİN OPERATÖRÜ) (NON LİNEER FİLTRELEMEDİR) Griton basamaklarını koruyan çok basit düzgünleştirme operatörü min operatörü dür. min operatörü maske içerisindeki minimum gritonu yeni griton olarak verir. Şekillerden de görüleceği üzere resmin karanlık bölgesi (griton 1) temizlenir. fakat önceki aydınlık bölgede bozulmalar meydana gelir. 26

113 MAX OPERATÖRÜ: (BASİT BİR NONLİNEER FİLTRELEMEDİR) Min operatörünü tamamlayıcı max operatörü dür; yani maske içerisindeki en yüksek griton değeri, yeni griton değeri olarak sonuç resimde ilgilenilen noktaya atanır. Dolayısıyla sonuç resimde aydınlık bölge temizlenir. Fakat karanlık bölgede bozulmalar meydana gelir. Şekilde Max operatörünün resim üzerindeki etkisini göstermektedir. 27


114 Max Filtre: Aşağıdaki imgeye 3x3 pencere boyutunda max filtre uygulayarak ikinci imgeyi elde eden matlab kodlarını yazalım. 28

115 ORTA-DEĞER (MEDİAN) OPERATÖRÜ (NONLİNEER FİLTRELEMEDİR) min ve max operatörlerinin fonksiyonlarını birleştiren ve onların yukarıda bahsedilen dezavantajlarına sahip olmayan bir operatöre ihtiyaç vardır. Şekil bu çözümü göstermektedir. Orta-değer operatöründeki fikir, maske içerisindeki gritonları değerlerine göre sıralamaktır. Bu sıralamada ortada bulunan değer sonuç resmin ilgilenilen pikseli için kullanılır. Bu strateji yüksek ve alçak gritonların piklerini, griton bölgeleri ayıran griton basamaklarını yassılaştırmadan yok eder. Orta-değer operatörünün dezavantajı; komşu piksel gritonlarının sıralamasından dolayı hesaplama zamanın yüksek olmasıdır. Orta-değer operatörünün resim üzerindeki etkisini göstermektedir. Resimden de görüleceği üzere, gürültülü resim tamamen onarılmıştır sıralama orta değer 30
. Sadece gritonları ilgilenilen pikselin gritonuna en yakın k tane piksel üzerine uygulanır.")
116 K-ENYAKIN-KOMŞU (NONLİNEER FİLTRELEMEDİR:) Diğer bir kenar korumalı düzgünleştirme metodu k-enyakın-komşu metodudur. Bu, maskenin bütün pikselleri üzerinde kullanılmayan bir normal ortalama operatörüdür (kutu filtre). Sadece gritonları ilgilenilen pikselin gritonuna en yakın k tane piksel üzerine uygulanır. Şekilde 3x3 enyakın-komşu operatörünün k = 3 ile (ilgilenilen piksel dahil) kaynak resme uygulanması ile elde edilen sonucu göstermektedir. Ortalamanın sadece 3 griton kullanılarak hesaplanmasından dolayı, düzgünleştirme etkisi orta-değer operatöründen azdır. Genellikle k, maskedeki piksel sayısının yarısından fazla olmalıdır. Şekil, k-enyakın-komşu operatörünün resim üzerindeki uygulamasını göstermektedir. 31
117 NONLİNEER UZAYSAL FİLTRE FONKSİYONLARI Matlab image processing toolbox ta(imt) nonlinear filtreleme için iki önemli fonksiyon vardır: nlfilter colfilt Her ikiside doğrudan 2 boyutta çalışır. colfilt; datayı sütun formunda organize eder. Daha fazla hafızaya ihtiyaç gösterir. nfilter fonksiyonundan daha hızlı çalışır. Birçok görüntü işleme uygulamalarında hız önemli bir faktördür. Nonlineer uzaysal filtreleme işlemlerinde daha çok colfilt kullanılır. 32
118 m ve n filtre boyutudur. sliding, f giriş görüntüsünde pikselden piksele mxn lik filtrenin kaydırma işlemini references a function, which we denote arbitrarily as fun, parameters indicates parameters (separated by commas) that may be required by function fun. The is called a function handle, a MATLAB data type that contains information used in referencing a function. 33

119 Lineer filtrelerde söylendiği gibi, görüntünün kenarlarınada filtrenin uygulanabilmesi için görüntü datasına genellikle 0 lar eklenmeliydi. Colfilt kullanılacaksa, filtrelemeden önce muhakkak giriş datasına yeterli miktarda ekleme yapılmalıdır. Bunun için padarray fonksiyonu kullanılır. Burada f giriş görüntüsü, fp paddlenmiş(eklenmiş) görüntü,[r c], f ye eklenecek pad in boyutunu verir. method ve direction yeni tablodaki yerleşimi bildirir. 34
120 >> A=[1 2 3; 4 5 6] A = >> B=padarray(A,[2 3],0,'both') B = >> B=padarray(A,[2 3],0,'post') B = >> B=padarray(A,[2 3],0,'pre') B =
![A = [ 1 2; 3 4]; B = [ 5 6; 7 8]; C = cat(3,a,b) C(:,:,1) = 1 2 3 4 C(:,:,2) = 5 6 7 8 D = padarray(c,[3 3]) D(:,:,1) == a =](/docs-images/73/69181149/images/121-0.jpg "[ 1 2 3 4 ]; b = padarray(a,[0 3],'symmetric','pre') b = >>A = [1 2; 3 4]; >>B = padarray(a,[3 2],'replicate','post') B = 36")
121 A = [ 1 2; 3 4]; B = [ 5 6; 7 8]; C = cat(3,a,b) C(:,:,1) = C(:,:,2) = D = padarray(c,[3 3]) D(:,:,1) == a = [ ]; b = padarray(a,[0 3],'symmetric','pre') b = >>A = [1 2; 3 4]; >>B = padarray(a,[3 2],'replicate','post') B = 36
122 ÖNEMLİ NOT: FREKANS BİLEŞENİ KAVRAMI Bir görüntüdeki filtrenin etkisini standart bir formda ifade edebilmek için en önemli kriterlerden birisi görüntünün frekans bileşenleridir. Kabaca bir görüntünün frekans bileşenleri; mesafeye göre gri seviye değişiminin miktarı olarak ifade edilir. Görüntünün Yüksek frekanslı bileşenleri; küçük mesafelerde piksellerin gri değerlerin büyük miktarda değişikliklerini karakterize eder. Yüksek frekans bileşenlerine örnek olarak; resmin kenarları (en büyük gri seviye değişimleri kenarlarda olur) ve gürültüler verilebilir. Görüntününün Düşük frekanslı bileşenleri: Resimdeki piksellerin gri değerlerinin mesafeye göre pek az değiştiği görüntü parçaları ile karakterize edilir. Bunlara örnek arka planlar (gri seviyeleri çok az değişen yüzeyler), cilt dokuları verilebilir. Bu tanımlamalar göre filtreleri; Yüksek geçiren Filtreler: Yüksek frekanslı bileşenleri geçirir. Düşük frekanslı bileşenleri yok eder. Örnek kenar çıkarma işlemleri. Alçak geçiren Filtreler: Görüntüdeki Alçak frekans bileşenlerini geçirir veya kuvvetlendirir. Yüksek frekans bileşenlerin yok eder. Örneğin 3x3Lük average filtresi bir alçak geçiren filtredir. Çünkü resmin kısa mesafede değişen (Özellikle kenarlar - Gürültüler) piksellerini yok eder. Belirli mesafede az değişen piksellerini muhafaza eder. Dolayısıyla resim bulanıklaşır (Blurring). 37
123 FSPECİAL FONKSİYONU Lineer uzaysal filtrelemenin diğer bir yolu da özel lineer filtrelerin yaratılabilmesidir. Buna göre, oluşturulacak lineer filitre maskesi için aşağıdaki deyim kullanılır. >> F = fspecial ( type, parameters) Burada type, özel filtre tipini belirtir. Parameters ise filtreyi tanımlayan değerlerdir. Bu şekilde kullanabileceğimiz hazır özel filrteler vardır. Bunlar tabloda görülmektedir. 38

124 ÇOK KULLANILAN BAZI ÖZEL LİNEER FİLTRELERİN FSPECİAL İLE TANIMI Average: Ağırlıklı ortalama filtredir. Default boyutu 3x3 boyutlu elemanlar 1 olan bir matristir. Eğer r,c yerine tek bir sayı yazılırsa kare matris filtre olur. Disk: Bir dairesel ortalama filtredir. r dairenin yarıçapıdır. R nin default değeri 5 tir. Gaussian: Alçak geçiren bir filtredir. Standart sapması pozitif olan ve boyutu rxc olan bir filtredir. Rxc eğer tek bir değer ise kare matris filtredir. Laplacian ve log, 2.türev işlemine dayanan yüksek filtre tipleridir. 39

125 ÇOK KULLANILAN BAZI ÖZEL LİNEER FİLTRELERİN FSPECİAL İLE TANIMI (2) Previt ve sobel Filtreleri yüksek geçiren basit tip filtrelerdir. Görüntüde kenar çıkarma, kenar iyileştirme işlemlerinde kullanılabilirler. 40
126 41
127 ÇOK KULLANILAN ÖZEL NONLİNEER UZAYSAL FİLTRELER Matlabda; özel Nonlineer uzaysal filtre işlemi genel olarak ordfilt2 fonksiyonuyla gerçekleştirilir. Bu filtre dereceli (sıralı)- istatistiksel filtreleme (rank order- sayı sıralı-filtre) işlemidir. Bu fonksiyon 3 parametreye ihtiyaç gösterir. F: filtrelenecek görüntü matrisi, order; rakamsal bir değerdir. Maske içindeki en küçük veya en büyük n.değere göre işlem yapmayı ifade eder. Domain; maske boyutunun ve elemanlarının tanımı dır. En çok bilinenleri, min filtre, Maks.Filtre ve Median Filtredir. g=ordfilt2(f, 1, ones(m,n)) İşlemi, mxn boyutlu ve elemanları 1 olan bir maske kullanılarak, f görüntüsünü min filtreye tabi tutmaktır. g nin ilgili elemanını değeri maskenin kapsadığı komşu elemanlar içerisinde en küçük değerde olanıdır(order=1 olduğu için). 42
128 MİN.FİLTRELEME ÖRNEĞİ 43
129 MAKS.FİLTRELEME ÖRNEĞİ G=ORDFİLT2(F,M*N,DOMAİN) Maks.filtre maskenin kapsadığı elemanlar içindeki en büyük değerli elemanı yeni elemanla değiştirmek olduğuna göre, min filtrede (m*n) değerini order kısmına yazmak yeterlidir. 44
130 MEDİAN FİLTRELEMEYE ÖRNEK G=ORDFİLTER2(F, MEDİAN (1:M*N), ONES(M,N)) Median Filtre maske altındaki piksel gri seviye değerlerini azdan çoğa doğru bu değerlerin ortadakini almaktı. Yukarıdaki fonksiyonda order yerine (1:m*n) değerleri arasında %50 büyüklükteki değerin alınmasıdır. Median filtreler görüntüdeki salt-pepper(tuz-biber) gürültülerini filtreler. 45
131 MEDİAN FİLTREYE ÖRNEK 46
132 Burada mxn uzunlukta bir komşuluk ilişkisi tanımlanır ve onun piksel değerlerinin ortancası ile hesaplar yapılır. Padopt üç olası sınır padding seçeneklerden birini belirtir: Sıfır (varsayılan-default): kenarlara 0 dolgusu yapılır. Simetrik: kenarlar ayna-yansımalı simetriklik özelliği ile doldurulur. 'endeksleme ise, veri double ise kenarlar 1 ile değil ise 0 la doldurulur. Örnek default fonksiyon g = medfilt2 (f) 3x3 maske ile medyan hesaplar. Kenarlar 0 ile doldurulur. MEDİAN FİLTRE İÇİN BAŞKA BİR FONKSİYON G=MEDFİLT2(F, [M N], PADOPT) 47


133 ÖRNEK:medfilt2 I = imread('eight.tif'); J = imnoise(i,'salt & pepper',0.02); K = medfilt2(j); imshow(j), figure, imshow(k) 48
134 Frekans domain inde İşlemler
135 Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise, sinyalin ilk halindeki parametrelerle ifade edilebilir şekle geri döndürülme işlemidir. Fourier transformasyonları (dönüştürücüleri) bir sinyalin frekans domanine dönüşümünü sağlar.
136 Frekans uzayı İmge uzayında yapılabilecek işlemlerin yanında, frekans düzlemindeki bilgi de imge işlemede sıkça kullanılmaktadır. Daha önce imge süzgeçleme için konvülüsyondan bahsedilmişti. İmge uzayında yapılan bu işlem her bir piksel için tekrarlanmakla birlikte, çekirdek elemanına bağlı olarak hesapsal yükü oldukça fazla olabilmektedir. Frekans uzayına geçildiğinde konvülüsyon işlemi çarpma işlemine dönüşeceğinden, bu uzayda yapılacak süzgeçleme işlemlerinde frekans uzayına geçiş ve geri dönüş işlemleri için hesapsal yükten bahsedilebilir. Ayrıca frekans uzayında imgedeki piksellerin dağılımına ilişkin bilgileri gözlemlemek de mümkündür. Frekans uzayına geçiş için genellikle Fourier dönüşümü kullanılmaktadır.
137 Fourier Dönüşümü Bu dönüşüm, görüntü işlemenin çok önemli konularından biridir. Uzaysal domainde başarılması zor işlemleri, frekans domain inde başaracak yapıda olan bu dönüşüm, görüntüyü oluşturan frekans bileşenlerini biribirinden ayırt edebildiği için değişik derecelerden alçak ve yüksek geçiren filtreleme işlemleri kolaylıkla başarılabilir. Önce tek boyutlu sonra iki boyutlu Fourier dönüşümünü kısaca hatırlayalım;
138 Temel Bilgi notu(fourier analizi) Periodik ve sonlu değer alabilen her fonksiyon, değişik frekanslarda titreşen sinüs veya cosinüslü bileşenlerin toplamından oluşur.
139 Tek boyutlu ayrık Fourier dönüşümü (DFT) Herhangi bir fonksiyon ayrıklaştırıldığında sonlu sayıda elemanlı bir dizi şeklinde ifade edilir. Örneğn bir kare dalganın ayrık zamanlı dizi şeklinde ifadesi; şeklinde olabilir.
140 Frekans Uzayı Ayrık Fourier Dönüşümü
141 Frekans Uzayı Ayrık Fourier Dönüşümü
142 Frekans Uzayı Ayrık Fourier Dönüşümü

")
143 Tek boyutlu DFT işlemiyle ilgili. F(n) =(1,1,1,1,0,0,0,0)
144
145 Fast Fourier Dönüşümü DFT, ayrık fonksiyonların fourier dönüşümünü yapmak için çok önemli bir yapı olmakla beraber, dizi eleman sayısının çok fazla olduğu dönüşümler için uzun zaman harcamaktadır. Özellikle resim işleme gibi data sayısı fazla olan işlemler için yavaştır. Bunun yerine FFT( Hızlı fourier dönüşümü) ile bileşen katsayıları bulunur. Burada dikkat edilecek konunun dizinin 2 nin kuvveleri sayısında elemandan oluşturulmasıdır.
 katsayıları aşağıdaki formülden hesaplanır.")
146 2-D (2 Boyutlu) DFT 2 boyutlu DFT; Matris şeklinde bir diziyi giriş kabul edip, yine matris şeklinde bir çıkış elde eder. Farz edelim ki; f(x, y), x = 0, 1, 2,..,M 1 ve y = 0, 1, 2,..,N 1, M N boyutunda bir görüntü olsun. Bu f görüntüsünün 2-D DFT sindeki F(u,v) katsayıları aşağıdaki formülden hesaplanır. F nin Fourier dönüşümü; F =F ( f ) Ters fourier dönüşümü ise; f = F -1 (F)




147 2-D DFT Eğer; f(x, y) dizisi reel ise, bunun fourier dönüşümü genellikle kompleks sayılardır. Dönüştürülmüş bir resmi frekans uzayında görmek (görsel analizi) onun spetrumunu ifade etmektir. R(u, v) ve I(u, v) sırasıyla; F(u, v) nin reel ve imajiner kısmını gösteriyorsa; Fourier ve güç spektrumu aşağıdaki gibi tarif edilir. Artık frekans uzayında bir görüntüyü, fourier spektrumu veya güç spektrumu ile ifade edebiliriz. Orijinal Genlik spk. Görüntünün tekrar orijinaline dönüştürülmesi için, hem genlik hem de faz bilgisine ihtiyaç vardır. Faz spk.

148 Frekans Uzayı İmge İşleme Aşamaları
149 DC katsayısı ve kaydırma (shifting) DFT deki DC katsayısı F(0,0) değeridir. Aşağıdaki denklemde v=u=0 konulduğunda bulunur. Buna göre Dc katsayısının değeri orijinal görüntü matrisindeki tüm eleman değerlerinin toplamı olarak ortaya çıkar. Bu değer yeni matrisin en üst sol köşesindedir. Kaydırma: Görüntüleme amacı için; DC katsayısının matrisin orta nokta elemanı olarak oluşması uygundur. Bunun için kaydırma yapılabilir. Kaydırma işlemi, dönüşümden önce f(x,y) matrisinin tüm elemanlarının (-1) x+y ile çarpılacağı anlamındadır.
150 2-D DFT nin bazı özellikleri F ve f yi hesaplayan denklemlerdeki üstel ifadeleri yandaki gibi ayrıştırabiliriz. Bunun anlamı x ve u ya ve y ve v ye göre ayrı ayrı işlem yapabiliriz. Yani iki boyutlu DFT tek boyutlu 2 adet DFT işleminden oluşmuştur. Bunuda resimdeki satırların ve sutunların ayrı ayrı DFT sinin alınıp biribileriyle ilişkilendirilmesi şeklinde düşünebiliriz.
151 Dönüşümün gösterilmesi F(x,y) görüntüsünden elde edilen F(u,v) fourier katsayılar matrisinin elemanları kompleks sayılardır. Kompleks sayılar direkt olarak görüntülenemez. Onların magnitüdleri (genlikleri) F(u,v) alınır. Bu bir takım double sınıfı büyük sayılardır. Bu büyük sahada uğraşmak için; 1-) F(u,v) deki en büyük değer m bulunur (Bu DC değerdir). Ve F(u,v) /m işlemi yapılır. Böylece imshow ile görüntülenebilir. 2-) F(u,v) yi görmek için mat2gray fonksiyonunu doğrudan kullanabiliriz. Genelde DC değerler çok büyük değerler olacağından; Bunun oluşturacağı görüntüde bu değer baskın çıkar. Bunun önüne geçmek için F(u,v) nın logaritmasının alınması daha uygundur. log(1+ F(u,v) ) Fourier transformasyonun magnitude unun (genliğinin) görüntülenmesi, transformasyonun spektrumu diye isimlendirilir.
152 MATLAB da Fourier Dönüşümü fft :Tek boyutlu DFT yapar(çıkışı vektördür) ifft : DFT vektörünün tersini alır. fft2: 2 boyutlu DFT yapar. Çıkışı Matristir. İfft2: DFT matrixinin tersini alır. fftshift: Bir tranformasyonu kaydırır. (örnek DC değerini merkeze alma gibi)
153 Frekans Uzayı Matlab da Frekans Uzayı İşlemleri MATLAB da frekans uzayı filtreleme için: 1. İmgenin AFD sini al (fft2 fonksiyonu). 2. Karmaşık imgeye kaydırma işlemi uygula (fftshift fonksiyonu). 3. Kaydırılmış F(u,v) yi H(u,v) ile noktasal çarp. 4. Karmaşık imgeye tekrar kaydırma işlemi uygula (fftshift). 5. Karmaşık imgenin ters AFD sini al (ifft2 fonksiyonu). 6. Elde edilen sonucun gerçek kısmını süzgeçlenmiş imge olarak kullan (real fonksiyonu).

154 Frekans Domain de FİLTRELEME Fourier dönüşümü bir domain dönüşüm işlemiydi. Filtreleme de bir filtre matrisinin görüntü matrisi ile konvolusyonu olduğundan Frekans domeninde filtreleme için fourier dönüşümü çok uygundur. Filtre matrisi yaratmanın en çok kullanılan yolu ise; Matlab kodu aşağıda verilen yapıdır. Burada 1.komut ile 256x256lık matris oluşturulur ( Bunların eleman değerleri -128 den başlayıp 1 er artarak 127 ye kadar değer alır. Burda z herbir x,y koordinatının genlik değeridir.
155 İdeal Alçak Geçiren Filtre Varsayılım ki bir görüntünün Fourier dönüşüm matrisi F elimizde mevcut olsun. Ve bunun DC katsayısını merkeze kaydırdığımızda, dolayısıyla düşük frekanslı bileşen katsayıları da merkeze kaymış olacaktır. Bu durumda bir alçak geçiren filtre matrisi (c) ile bu F dönüşüm matrisini uygun bir şekilde işleme tabi tutarak (elementer çarpım işlemi.* ( F.*c)), merkezdeki ve yakınındaki (alçak frekanslı bileşenler) değerler korunur ve merkezden uzak değerler (yüksek frekanslı bileşenler) ya küçülür veya yok olur. Böylece alçak geçiren filtre işlemi gerçekleşmiş olur. Bu filtrelenmiş FFT (DFT) matrisin inversi F -1 (F.c) alınarak uzaysal domaine dönülmüş olur. Filtrenin yarıçapı ne kadar küçükse elenen yüksek frekanslı bileşenler o kadar büyük olur. Resim bulanıklaşır
; >> imshow(cm) >> cf=fftshift(fft2(cm)); >> imshow(mat2gray(log(1+abs(cf)))) Buradan merkeze kaydırılmış transform matrisini (cf) bir daire matrisi ile çarparak ( * sembolu MATLAB da iki")
156 Frekans Domeninde ALÇAK GEÇİREN FİLTRE >> cm=imread('cameraman.tif'); >> imshow(cm) >> cf=fftshift(fft2(cm)); >> imshow(mat2gray(log(1+abs(cf)))) Buradan merkeze kaydırılmış transform matrisini (cf) bir daire matrisi ile çarparak ( * sembolu MATLAB da iki matrisin element-wise çarpımına eşittir) >> [x,y]=meshgrid(-128:127,-128:127); >> z=sqrt(x.^2+y.^2); >> c=(z<15); >> cf1=cf.*c; >> imshow(mat2gray(log(1+abs(cf1)))); >> s=ifft2(cf1); >> imshow(mat2gray((1+abs(s)))); > c=(z<50); >> cf1=cf.*c; >> imshow(mat2gray(log(1+abs(cf1)))); >> s=ifft2(cf1); >> imshow(mat2gray((abs(s))));
157 Frekans domaininde yüksek geçiren filtre Yüksek geçiren filtre ise, DC değeri merkeze kaydırılmış F matrisinin merkez veya merkeze yakın eleman değerlerini (Alçak bileşenleri) yok etmek veya zayıflatmak, merkezden uzak eleman değerlerini ise korumak şeklindedir. Filtre matrisi oluşturma işlemi alçak geçiren filtredeki gibidir. Tek fark aşağıdaki deyimdedir. Buradaki 15 örnek olarak verilmiştir. Oluşturulan c filtre matrisi ile F fft matrisi elemanter çarpma işlemine tabii tutulur. Filtreleme işlemi başarılmıştır. Bunun ters FFT si İfft2 alınarak, filtrelenmiş görüntü uzaysal domaine dönüştürülür. Yüksek geçiren filtreleme görüntüdeki nesne kenarlarının belirginleşmesine, gövdenin ise siyahlaşmasına neden olur.
![Frekans domaininde yüksek geçiren filtre >> cm=imread ('cameraman.tif'); >> [x,y]=meshgrid (-128:127,-128:127); >> z=sqrt(x.^2+y.](/docs-images/73/69181149/images/158-1.jpg "^2); >> c=(z>15); >> cf= fftshift(fft2(cm)); >> cfh=cf.")
158 Frekans domaininde yüksek geçiren filtre >> cm=imread ('cameraman.tif'); >> [x,y]=meshgrid (-128:127,-128:127); >> z=sqrt(x.^2+y.^2); >> c=(z>15); >> cf= fftshift(fft2(cm)); >> cfh=cf.*c; >> imshow(mat2gray(log(1+abs(cfh)))); >> cfhi=ifft2(cfh); >> imshow(uint8(abs(cfhi)))
159 Morfolojik Görüntü İşleme
160 Morfoloji nedir? Morfoloji, görüntü biçimi ve yapısı olarak tarif edilebilir (form and structure). Matematiksel morfoloji, görüntü üzerinde objeleri gösteren küme teorisine dayanır. Görüntü işlemede morfoloji, ikili görüntüler üzerinde 2B sayı kümelerinin tespitidir. Görüntüdek sınırlar, iskelet gibi yapıların tanınması ve çıkarılması, gürültü giderimi, bölütleme gibi uygulamalar için gerekli bir araçtır. İkili görüntüler üzerindeki işlemler gri seviye görüntüler için genişletilebilir.


161
 kadar ötelenmesi sonucu:")
162 Yansıma ve Ötelemee Bu işlemleri için bir referans nokta gerekmektedir. Yansıma: B noktası için: = {x x=-b, for b B} Translation: A noktasının x=(x 1,x 2 ) kadar ötelenmesi sonucu: (A) x = {c c=a+x, for a A} Reference point

163 Temel Mantıksal İşlemler
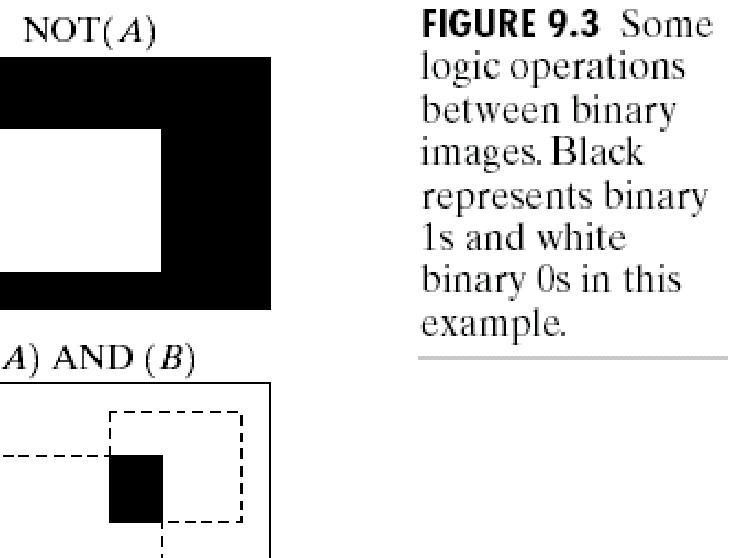

164 Binary Görüntülerde Mantıksal İşlemler
165 Matematiksel Morfoloji Matematiksel morfoloji iki temel operasyonu içerir: dilation erosion ayrıca birkaç komposit ilişkiyi içerir: Opening closing conditional dilation Morfolojik operatörlerin iki girişi vard Görüntü Yapısal eleman (structure element). dır:


166 Yapısal Eleman Örnekleri Morfolojik işlemler yapısal elemanlar a bağlı olarak tanımlanmaktadır. Bir yapısal eleman, görüntü yapısını araştırmak için kullanılan bir alt kümedir.


167 Erosion (Aşınma) A kümesinin B yapısal elemanının z noktasına göre kaydırılmış hali ile erosion işlemi sonucunda, eğer yapısal elemanın tamamı küme içerisinde ise sonuç 1 olur. Aksi taktirde 0 olur.
168 Erosion ikili imgedeki nesneyi küçültmeye ya da inceltmeye yarayan morfolojik işlemdir. İmge içerisindeki nesneler ufalır, delik varsa genişler, bağlı nesneler ayrılma eğilimi gösterir


169 Erosion-Aşınma
170 Erosion-Aşınma
171 Erosion-Aşınma
172 Erosion-Aşınma
173 Erosion-Aşınma
174 Erosion-Aşınma
175 Erosion-Aşınma
176 Erosion-Aşınma
177 Erosion-Aşınma




178 Erosion-Aşınma




179 Aşınma Örnek

180 Dilation (Yayma) Z noktasına göre kaydırılmış B yapısal elemanı ile A kümesinin keşisen ortak bir elemanı varsa merkez noktanın değeri 1 olur.
181 Dilation ikili imgedeki nesneyi büyütmeye ya da kalınlaştırmaya yarayan morfolojik işlemdir. Sayısal bir imgeyi genişletmek imgeyi yapısal elemanla kesiştiği bölümler kadar büyütmektir. İşlenecek imgenin her bir pikseli, yapısal elemanın merkez noktasına oturtularak genleşme işlemi yapılmaktadır. Kalınlaştırma işleminin nasıl yapılacağını yapısal eleman belirler. Yayma işlemi uygulanmış bir imgede, imge içerisindeki deliklerin ve boşlukların doldurulması ve köşe noktasının yumuşaması gözlenir
182 Dilation - Yayma
183 Dilation - Yayma
184 Dilation -Yayma
185 Dilation -Yayma
186 Dilation -Yayma
187 Yayma
188 Yayma
189 Yayma



190 Dilation -Yayma
191 Dilation Örnek




192 Dilation Örnek
193 Matlab Examples Make a structuring element SE = strel('square', W) or SE = strel('disk', R ) Dilation and erosion Dilation and erosion imdilate(im, SE) imerode(im, SE)



194 Opening Opening Bir erosion işlemi ardından bir dilation uygulanmasıdır.
195 Opening İmge üzerinde aşınma işleminin hemen ardından genleşme işlenmesi uygulanması sonucu açma işlemi elde edilir. İmge içerisindeki nesneler ve nesneler arasındaki boşluklar yapısal elemanın büyüklüğüne göre temizl lenir. İmge üzerinde kalan nesneler orijinal imgedeki şekillerinden biraz daha küçük hale gelir. Açma işlemi ile birbirine yakın iki nesne imgede fazla değişime sebebiyet vermeden ayrılmış olurlar


196 Closing Bir dilation işlemi ve ardından bir erosion işlemini tanımlar. İki işlemde aynı yapısal elemanı kullanır.
197 Closing imge üzerinde genleşme işleminin hemen ardından aşınma işleminin uygulanması sonucu kapama işlemi elde edilir. Dolayısıyla birbirine yakın iki nesnee imgede fazla değişiklik yapılmadan birbirine bağlanmış olur. Kapama işlemi sonunda imge içerisindeki noktalar birbirlerini kapatırlar, imgedeki ana hatlar daha da dolgunlaşır. Genleşme işlemine benzer bir şekilde kapama işleminde de birbirine yakın olan noktalar arasındaki boşluklar dolar ve noktalar birleşir
198 Matlab Morfolojik İşlemler 1 strel: strel, morfolojik işlemlerde kullanılan yapısal filtre elemanıdır. Morfolojik işlemleri hangi şekil ve parametrelerle uygulayacağımızı strel ile belirleriz. Kullanım şekli; SE = strel (filtreleme şekli, parametre) Örnek; SE =strel( disk, R) R; yarıçap SE = strel( square, L) L; karenin bir kenarının uzunluğu imdilate: açma işlemini yapar. imerode: aşındırma işlemi yapar.
199 Matlab Morfolojik İşlemler 2 imclose, imopen: imdilate ve imerode işlemlerinin birlikte kullanılması ile oluşan filtrelerdir. Uygulama mantıkları benzerdir. imfill: gri seviyede veya binary modda açıklıkları doldurur. bwarea: binary modda alan nesnel lerin alanını hesaplar. bwareaopen: binary modda küçükk parçaları(bağlı olmayan) yok eder. aşındırma işleminin benzeridir. bwconncomp: bağlı komponentleri buldurur. bwmorph: binary modda morfolojik işlemler yapılır. Birçok maskeleme çeşidi vardır.
; lvl=graythresh(bw); bw=im2bw(bw,lvl); se = strel('line',11,70); se1 = strel('square',8); bw2 = imdilate(bw,se);")
 subplot(1,3,3), imshow(bw3), title('erode sonucu') Örnekte; rice.")

200 Örnek 1 bw = imread('rice.png'); lvl=graythresh(bw); bw=im2bw(bw,lvl); se = strel('line',11,70); se1 = strel('square',8); bw2 = imdilate(bw,se); bw3 = imerode(bw,se1); subplot(1,3,1), imshow(bw), title('original') subplot(1,3,2), imshow(bw2), title('dilate sonucu') subplot(1,3,3), imshow(bw3), title('erode sonucu') Örnekte; rice.png görüntüsü sonucun dahaa anlaşılır gözükmesi için binary moda çevrildi. İşlemler gri seviyede de yapılabilir. se ve se1 olarak iki tane maske belirlendi. Maskelerin parametreleri isteğee göre değiştirilebilir. Mesela; açma işleminin daha belirgin olması için se maskesinin parametreleri artırılmalı. se1 maskesinde 8 sayısı 12 yapıldığında beyaz noktaların tamamen kaybolduğu görülür.

;")

201 Örnek 2 W = imread('circles.png'); show(bw); W2 = bwmorph(bw,'remove'); gure W3 = bwmorph(bw,'skel',inf); gure show(bw3) gure show(bw2)

;")
202 Örnek 3 BW4 = im2bw(imread('coins.png')); BW5 = imfill(bw4,'holes'); imshow(bw4), figure, imshow(bw5)
203 Görüntü Bölütleme
204 Bölütleme nedir? Bölütleme, bir görüntüyü anlamlı ve türdeş bölümlerden oluşan kümelere parçalamayı içerir Parçalanmış her bölümdeki pikseller, nitelikleri veya özellikleri aynı olan türdeş bir kümeye sahiptirler. Görüntü özelliklerinin bu kümeleri; piksel grilik seviyesi, piksel RGB rengi, pikselin kameradaki sırası, pikselin yeri, bölgesel es-değişirlik matrisi, gri seviyeler, zıtlık, spektral degerler veya niteliksel özellikleri içerebilir. Bölütlemenin sonucu, her biri tek etiketee sahip olan türdes bölümlerin bir sayısıdır. Böylece bir görüntü, birbirine baglı ve üst üste binmeyen bölümlerin bir kümesi olarak tanımlanır, bu durumda görüntüdeki her piksel ait oldugu bölümü gösteren tek bir bölüm etiketine sahip olur. Görüntü bölütlemenin sonuçları genellikle daha yüksek seviyeli sayısal görüntü isleme islemlerinin ilk parametreleri olarak kullanılırlar.




205




206




207 Orijinal Görüntü ve Bölütlenmiş Görüntü



208 Görüntü Bölütleme
209




210




211



212 Görüntü Segmentasyonu
İşaret İşleme ve Haberleşmenin Temelleri. Yrd. Doç. Dr. Ender M. Ekşioğlu eksioglue@itu.edu.tr http://www2.itu.edu.tr/~eksioglue
 İşaret İşleme ve Haberleşmenin Temelleri Yrd. Doç. Dr. Ender M. Ekşioğlu eksioglue@itu.edu.tr http://www2.itu.edu.tr/~eksioglue İşaretler: Bilgi taşıyan işlevler Sistemler: İşaretleri işleyerek yeni işaretler
İşaret İşleme ve Haberleşmenin Temelleri Yrd. Doç. Dr. Ender M. Ekşioğlu eksioglue@itu.edu.tr http://www2.itu.edu.tr/~eksioglue İşaretler: Bilgi taşıyan işlevler Sistemler: İşaretleri işleyerek yeni işaretler
Frekans domain inde İşlemler. BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN
 Frekans domain inde İşlemler BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise,
Frekans domain inde İşlemler BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise,
NEIGHBOURHOOD PROCESSING (KOMŞULUK İLİŞKİLİ İŞLEMLERİ- BÖLGESEL İŞLEMLER-UZAYSAL FİLTRELEME) BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr.
 BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr.") NEIGHBOURHOOD PROCESSING (KOMŞULUK İLİŞKİLİ İŞLEMLERİ- BÖLGESEL İŞLEMLER-UZAYSAL FİLTRELEME) BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN 1 KOMŞULUK İLİŞKİLİ İŞLEMLER (UZAYSAL FİLİTRELER) Noktasal
NEIGHBOURHOOD PROCESSING (KOMŞULUK İLİŞKİLİ İŞLEMLERİ- BÖLGESEL İŞLEMLER-UZAYSAL FİLTRELEME) BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN 1 KOMŞULUK İLİŞKİLİ İŞLEMLER (UZAYSAL FİLİTRELER) Noktasal
Görüntü İşleme Dersi Ders-8 Notları
 Görüntü İşleme Dersi Ders-8 Notları GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
Görüntü İşleme Dersi Ders-8 Notları GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
AKÜ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 GÖRÜNTÜ İŞLEME DERS-8 YARDIMCI NOTLARI -2018 Gri Seviye Dönüşümleri Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
GÖRÜNTÜ İŞLEME DERS-8 YARDIMCI NOTLARI -2018 Gri Seviye Dönüşümleri Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ
 GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
Gri Seviye Dönüşümleri ve Uzaysal Filtreleme. BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN
 Gri Seviye Dönüşümleri ve Uzaysal Filtreleme BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini
Gri Seviye Dönüşümleri ve Uzaysal Filtreleme BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini
MOD419 Görüntü İşleme
 MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
Görüntü İşleme. K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI. Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003
 Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
Görüntü İşleme. Dijital Görüntü Tanımları. Dijital görüntü ise sayısal değerlerden oluşur.
 Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME
 GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME DERS İÇERİĞİ Histogram İşleme Filtreleme Temelleri HİSTOGRAM Histogram bir resimdeki renk değerlerinin sayısını gösteren grafiktir. Histogram dengeleme
GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME DERS İÇERİĞİ Histogram İşleme Filtreleme Temelleri HİSTOGRAM Histogram bir resimdeki renk değerlerinin sayısını gösteren grafiktir. Histogram dengeleme
Uzaysal Görüntü İyileştirme/Filtreleme. Doç. Dr. Fevzi Karslı fkarsli@ktu.edu.tr
 Uasal Görüntü İileştirme/Filtreleme Doç. Dr. Fevi Karslı karsli@ktu.edu.tr İileştirme Herhangi bir ugulama için, görüntüü orijinalden daha ugun hale getirmek Ugunluğu her bir ugulama için sağlamak. Bir
Uasal Görüntü İileştirme/Filtreleme Doç. Dr. Fevi Karslı karsli@ktu.edu.tr İileştirme Herhangi bir ugulama için, görüntüü orijinalden daha ugun hale getirmek Ugunluğu her bir ugulama için sağlamak. Bir
BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ. Haftalık Ders Planı
 Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme
 BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk alp.erturk@kocaeli.edu.tr Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk alp.erturk@kocaeli.edu.tr Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Hafta 5 Uzamsal Filtreleme
 BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
Şekil 1.1 Genliği kuvantalanmamış sürekli zamanlı işaret. İşaretin genliği sürekli değerler alır. Buna analog işaret de denir.
 İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Görüntü İşleme Ders-7 AND, NAND. % bir görüntüde küçük bir alanın kesilip çıkartılması. >> y=imread('headquarters-2and.jpg');
;") Görüntü İşleme Ders-7 AND, NAND % bir görüntüde küçük bir alanın kesilip çıkartılması. >> x=imread('headquarters-2.jpg'); >> y=imread('headquarters-2and.jpg'); >> x=rgb2gray(x); >> y=rgb2gray(y); >> imshow(y)
Görüntü İşleme Ders-7 AND, NAND % bir görüntüde küçük bir alanın kesilip çıkartılması. >> x=imread('headquarters-2.jpg'); >> y=imread('headquarters-2and.jpg'); >> x=rgb2gray(x); >> y=rgb2gray(y); >> imshow(y)
GÖRÜNTÜ İŞLEME UYGULAMALARI. Arş. Gör. Dr. Nergis TURAL POLAT
 GÖRÜNTÜ İŞLEME UYGULAMALARI Arş. Gör. Dr. Nergis TURAL POLAT İçerik Görüntü işleme nedir, amacı nedir, kullanım alanları nelerdir? Temel kavramlar Uzaysal frekanslar Örnekleme (Sampling) Aynalama (Aliasing)
GÖRÜNTÜ İŞLEME UYGULAMALARI Arş. Gör. Dr. Nergis TURAL POLAT İçerik Görüntü işleme nedir, amacı nedir, kullanım alanları nelerdir? Temel kavramlar Uzaysal frekanslar Örnekleme (Sampling) Aynalama (Aliasing)
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 6 Kenar, Köşe, Yuvarlak Tespiti Alp Ertürk alp.erturk@kocaeli.edu.tr KENAR TESPİTİ Kenar Tespiti Amaç: Görüntüdeki ani değişimleri / kesintileri algılamak Şekil bilgisi elde
Bilgisayarla Görüye Giriş Ders 6 Kenar, Köşe, Yuvarlak Tespiti Alp Ertürk alp.erturk@kocaeli.edu.tr KENAR TESPİTİ Kenar Tespiti Amaç: Görüntüdeki ani değişimleri / kesintileri algılamak Şekil bilgisi elde
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI
 DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
İLERİ GÖRÜNTÜ İŞLEME Ders-1
 İLERİ GÖRÜNTÜ İŞLEME Ders- Elektromanyetik Spektrum Görünür Bölge 7 nm 4 nm Temel Kavramlar (Prof. Dr. Sarp ERTÜRK) 9/24/24 2 Hazırlayan: M. Kemal GÜLLÜ Sayısal İmge Gösterimi f x, y imgesi örneklendiğinde
İLERİ GÖRÜNTÜ İŞLEME Ders- Elektromanyetik Spektrum Görünür Bölge 7 nm 4 nm Temel Kavramlar (Prof. Dr. Sarp ERTÜRK) 9/24/24 2 Hazırlayan: M. Kemal GÜLLÜ Sayısal İmge Gösterimi f x, y imgesi örneklendiğinde
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
AMAÇ Araçlardaki Kamera Sistemleri
 SUNU PLANI AMAÇ OPEN CV GÖRÜNTÜ EŞİKLEME KENAR BULMA ŞEKİL BULMA GÖRÜNTÜ GENİŞLETME VE BOZMA GÖRÜNTÜ DOLDURMA AFFİNE DÖNÜŞÜMÜ PERSPEKTİF DÖNÜŞÜM KUŞ BAKIŞI GÖRÜNTÜ DÖNÜŞÜMÜ AMAÇ Araçlardaki Kamera Sistemleri
SUNU PLANI AMAÇ OPEN CV GÖRÜNTÜ EŞİKLEME KENAR BULMA ŞEKİL BULMA GÖRÜNTÜ GENİŞLETME VE BOZMA GÖRÜNTÜ DOLDURMA AFFİNE DÖNÜŞÜMÜ PERSPEKTİF DÖNÜŞÜM KUŞ BAKIŞI GÖRÜNTÜ DÖNÜŞÜMÜ AMAÇ Araçlardaki Kamera Sistemleri
AKÜ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 GÖRÜNTÜ İŞLEME DERS-9 YARDIMCI NOTLARI -2018 Hızlı Fourier Dönüşümü Matlab Örnekleri: fftshow() fonksiyonu function [ ] = fftshow(f) fl=log(1+abs(f)); fm=max(fl(:)); figure,imshow(im2uint8(fl/fm)); end
GÖRÜNTÜ İŞLEME DERS-9 YARDIMCI NOTLARI -2018 Hızlı Fourier Dönüşümü Matlab Örnekleri: fftshow() fonksiyonu function [ ] = fftshow(f) fl=log(1+abs(f)); fm=max(fl(:)); figure,imshow(im2uint8(fl/fm)); end
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
Ayrık-Zaman Sistemler
 Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
İMGE İŞLEME Ders-9. İmge Sıkıştırma. Dersin web sayfası: (Yrd. Doç. Dr. M.
 İMGE İŞLEME Ders-9 İmge Sıkıştırma (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ İmge Sıkıştırma Veri sıkıştırmanın
İMGE İŞLEME Ders-9 İmge Sıkıştırma (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ İmge Sıkıştırma Veri sıkıştırmanın
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
Lineer Cebir. Doç. Dr. Niyazi ŞAHİN TOBB. İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler
 Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA
 UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında ucuz ve hızlı sonuç alınabilen uzaktan algılama tekniğinin, yenilenebilir
UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında ucuz ve hızlı sonuç alınabilen uzaktan algılama tekniğinin, yenilenebilir
İmage segmentasyon (Görüntü Bölütleme)
") İmage segmentasyon (Görüntü Bölütleme) Segmantasyon (Bölütleme) Segmentasyon genellikle görüntü analizinin ilk aşamasıdır. Görüntü bölütleme, bir görüntüyü her biri içerisinde farklı özelliklerin tutulduğu
İmage segmentasyon (Görüntü Bölütleme) Segmantasyon (Bölütleme) Segmentasyon genellikle görüntü analizinin ilk aşamasıdır. Görüntü bölütleme, bir görüntüyü her biri içerisinde farklı özelliklerin tutulduğu
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI
 GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI NETLEŞTİRME/KESKİNLEŞTİRME FİLTRESİ (Sharpening Filter) Bu algoritma orjinal görüntüden, görüntünü yumuşatılmış halini çıkararak belirgin kenarların
GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI NETLEŞTİRME/KESKİNLEŞTİRME FİLTRESİ (Sharpening Filter) Bu algoritma orjinal görüntüden, görüntünü yumuşatılmış halini çıkararak belirgin kenarların
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI
 KENAR BELİRLEME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun.
 Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
İstatistik ve Olasılık
 İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
Bilgisayarla Fotogrametrik Görme
 Bilgisayarla Fotogrametrik Görme Dijital Görüntü ve Özellikleri Yrd. Doç. Dr. Mustafa DİHKAN 1 Dijital görüntü ve özellikleri Siyah-beyaz resimler için değer elemanları 0-255 arasındadır. 256 farklı durum
Bilgisayarla Fotogrametrik Görme Dijital Görüntü ve Özellikleri Yrd. Doç. Dr. Mustafa DİHKAN 1 Dijital görüntü ve özellikleri Siyah-beyaz resimler için değer elemanları 0-255 arasındadır. 256 farklı durum
Dijital Görüntü İşleme Teknikleri
 Teknikleri Ders Notları, 2013 Doç. Dr. Fevzi Karslı Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 08 Ekim 2013 Salı 1 Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, temel kavramlar, kaynaklar.
Teknikleri Ders Notları, 2013 Doç. Dr. Fevzi Karslı Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 08 Ekim 2013 Salı 1 Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, temel kavramlar, kaynaklar.
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Sürekli-zaman İşaretlerin Ayrık İşlenmesi
 Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
Tanımlayıcı İstatistikler. Yrd. Doç. Dr. Emre ATILGAN
 Tanımlayıcı İstatistikler Yrd. Doç. Dr. Emre ATILGAN 1 Tanımlayıcı İstatistikler Yer Gösteren Ölçüler Yaygınlık Ölçüleri Merkezi Eğilim Ölçüleri Konum Ölçüleri 2 3 Aritmetik Ortalama Aritmetik ortalama,
Tanımlayıcı İstatistikler Yrd. Doç. Dr. Emre ATILGAN 1 Tanımlayıcı İstatistikler Yer Gösteren Ölçüler Yaygınlık Ölçüleri Merkezi Eğilim Ölçüleri Konum Ölçüleri 2 3 Aritmetik Ortalama Aritmetik ortalama,
GÖRÜNTÜ İŞLEME - (5.Hafta)
") GÖRÜNTÜ İŞLEME - (5.Hafta) RESİM YUMUŞATMA (BULANIKLAŞTIRMA-BLURRING) FİLTRELERİ Görüntü işlemede, filtreler görüntüyü yumuşatmak yada kenarları belirginleştirmek için dijital filtreler kullanılır. Bu
GÖRÜNTÜ İŞLEME - (5.Hafta) RESİM YUMUŞATMA (BULANIKLAŞTIRMA-BLURRING) FİLTRELERİ Görüntü işlemede, filtreler görüntüyü yumuşatmak yada kenarları belirginleştirmek için dijital filtreler kullanılır. Bu
MMT 106 Teknik Fotoğrafçılık 3 Digital Görüntüleme
 MMT 106 Teknik Fotoğrafçılık 3 Digital Görüntüleme 2010-2011 Bahar Yarıyılı Ar. Gör. Dr. Ersoy Erişir 1 Konvansiyonel Görüntüleme (Fotografi) 2 Görüntü Tasarımı 3 Digital Görüntüleme 3.1 Renkler 3.2.1
MMT 106 Teknik Fotoğrafçılık 3 Digital Görüntüleme 2010-2011 Bahar Yarıyılı Ar. Gör. Dr. Ersoy Erişir 1 Konvansiyonel Görüntüleme (Fotografi) 2 Görüntü Tasarımı 3 Digital Görüntüleme 3.1 Renkler 3.2.1
ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER
 ADC ve DAC 1 BM-201 2 ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER Maksimum ve minimum sınırları arasında farklı değerler alarak değişken elektriksel büyüklüklere analog bilgi ya da analog değer denir. Akım ve gerilim
ADC ve DAC 1 BM-201 2 ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER Maksimum ve minimum sınırları arasında farklı değerler alarak değişken elektriksel büyüklüklere analog bilgi ya da analog değer denir. Akım ve gerilim
7. BÖLÜM İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI .= 1 1 + + Genel: Vektörler bölümünde vektörel iç çarpım;
 İÇ ÇARPIM UZAYLARI 7. BÖLÜM İÇ ÇARPIM UZAYLARI Genel: Vektörler bölümünde vektörel iç çarpım;.= 1 1 + + Açıklanmış ve bu konu uzunluk ve uzaklık kavramlarını açıklamak için kullanılmıştır. Bu bölümde öklit
İÇ ÇARPIM UZAYLARI 7. BÖLÜM İÇ ÇARPIM UZAYLARI Genel: Vektörler bölümünde vektörel iç çarpım;.= 1 1 + + Açıklanmış ve bu konu uzunluk ve uzaklık kavramlarını açıklamak için kullanılmıştır. Bu bölümde öklit
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
Hızlı Düzey Küme Yöntemine Bağlı Retinal Damar Bölütlemesi. Bekir DİZDAROĞLU. KTÜ Bilgisayar Mühendisliği Bölümü
 Bekir DİZDAROĞLU KTÜ Bilgisayar Mühendisliği Bölümü bekir@ktu.edu.tr 1/29 Tıbbi imge bölütleme klasik yaklaşımları a) Piksek tabanlı b) Kenar tabanlı c) Bölge tabanlı d) Watershed (sınır) tabanlı e) Kenar
Bekir DİZDAROĞLU KTÜ Bilgisayar Mühendisliği Bölümü bekir@ktu.edu.tr 1/29 Tıbbi imge bölütleme klasik yaklaşımları a) Piksek tabanlı b) Kenar tabanlı c) Bölge tabanlı d) Watershed (sınır) tabanlı e) Kenar
İkili (Binary) Görüntü Analizi
 Görüntü Analizi") İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
Bölüm 6 Görüntü Onarma ve Geriçatma
 BLM429 Görüntü İşlemeye Giriş Bölüm 6 Görüntü Onarma ve Geriçatma Dr. Öğr. Üyesi Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak nesnelerin
BLM429 Görüntü İşlemeye Giriş Bölüm 6 Görüntü Onarma ve Geriçatma Dr. Öğr. Üyesi Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak nesnelerin
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Final
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER
 TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
İletken Düzlemler Üstüne Yerleştirilmiş Antenler
 İletken Düzlemler Üstüne Yerleştirilmiş Antenler Buraya dek sınırsız ortamlarda tek başına bulunan antenlerin ışıma alanları incelendi. Anten yakınında bulunan başka bir ışınlayıcı ya da bir yansıtıcı,
İletken Düzlemler Üstüne Yerleştirilmiş Antenler Buraya dek sınırsız ortamlarda tek başına bulunan antenlerin ışıma alanları incelendi. Anten yakınında bulunan başka bir ışınlayıcı ya da bir yansıtıcı,
MATEMATİK ÖĞRETMENLİK ALAN BİLGİSİ - DENEME SINAVI DENEME. Diğer sayfaya geçiniz.
 MATEMATİK. DENEME ÖĞRETMENLİK ALAN BİLGİSİ - DENEME SINAVI. f : X tanımlı y = f() fonksiyonu için lim f ( ) = L ise aşağıdaki önermelerden kaç tanesi kesinlikle doğrudur? 0 I. X dir. 0 II. f() fonksiyonu
MATEMATİK. DENEME ÖĞRETMENLİK ALAN BİLGİSİ - DENEME SINAVI. f : X tanımlı y = f() fonksiyonu için lim f ( ) = L ise aşağıdaki önermelerden kaç tanesi kesinlikle doğrudur? 0 I. X dir. 0 II. f() fonksiyonu
Görüntü Restorasyonu. BMÜ-357 Sayısal Görüntü İşeme Yrd. Doç. Dr. İlhan AYDIN
 Görüntü Restorasyonu BMÜ-357 Sayısal Görüntü İşeme Yrd. Doç. Dr. İlhan AYDIN Görüntü İyileştirme (İmage restoration) Görüntü restorasyonu konusu, bir görüntünün oluşumu esnasında oluşabilen veri kayıplarını
Görüntü Restorasyonu BMÜ-357 Sayısal Görüntü İşeme Yrd. Doç. Dr. İlhan AYDIN Görüntü İyileştirme (İmage restoration) Görüntü restorasyonu konusu, bir görüntünün oluşumu esnasında oluşabilen veri kayıplarını
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı : Bilgisayar Mühendisliğinde Matematik Uygulamaları
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı : Bilgisayar Mühendisliğinde Matematik Uygulamaları
İMGE İŞLEME Ders-2. İmge Dosya Tipleri ve Temel İşlemler. Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm
 İMGE İŞLEME Ders-2 İmge Dosya Tipleri ve Temel İşlemler (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ MATLAB temel bilgiler
İMGE İŞLEME Ders-2 İmge Dosya Tipleri ve Temel İşlemler (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ MATLAB temel bilgiler
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
8. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 8. HAFTA BLM323 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 MATRİSLER Matris veya dizey, dikdörtgen bir sayılar tablosu
8. HAFTA BLM323 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 MATRİSLER Matris veya dizey, dikdörtgen bir sayılar tablosu
Gama ışını görüntüleme: X ışını görüntüleme:
 Elektronik ve Hab. Müh. Giriş Dersi Görüntü İşleme Yrd. Doç. Dr. M. Kemal GÜLLÜ Uygulama Alanları Gama ışını görüntüleme: X ışını görüntüleme: Uygulama Alanları Mor ötesi bandı görüntüleme: Görünür ve
Elektronik ve Hab. Müh. Giriş Dersi Görüntü İşleme Yrd. Doç. Dr. M. Kemal GÜLLÜ Uygulama Alanları Gama ışını görüntüleme: X ışını görüntüleme: Uygulama Alanları Mor ötesi bandı görüntüleme: Görünür ve
3.3. İki Tabanlı Sayı Sisteminde Dört İşlem
 3.3. İki Tabanlı Sayı Sisteminde Dört İşlem A + B = 2 0 2 1 (Elde) A * B = Sonuç A B = 2 0 2 1 (Borç) A / B = Sonuç 0 + 0 = 0 0 0 * 0 = 0 0 0 = 0 0 0 / 0 = 0 0 + 1 = 1 0 0 * 1 = 0 0 1 = 1 1 0 / 1 = 0 1
3.3. İki Tabanlı Sayı Sisteminde Dört İşlem A + B = 2 0 2 1 (Elde) A * B = Sonuç A B = 2 0 2 1 (Borç) A / B = Sonuç 0 + 0 = 0 0 0 * 0 = 0 0 0 = 0 0 0 / 0 = 0 0 + 1 = 1 0 0 * 1 = 0 0 1 = 1 1 0 / 1 = 0 1
MİKROİŞLEMCİ İLE A/D DÖNÜŞÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR ORGANİZASYONU LABORATUVARI MİKROİŞLEMCİ İLE A/D DÖNÜŞÜMÜ 1. GİRİŞ Analog işaretleri sayısal işaretlere dönüştüren elektronik devrelere
KARADENİZ TEKNİK ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR ORGANİZASYONU LABORATUVARI MİKROİŞLEMCİ İLE A/D DÖNÜŞÜMÜ 1. GİRİŞ Analog işaretleri sayısal işaretlere dönüştüren elektronik devrelere
İÇİNDEKİLER ÖNSÖZ Bölüm 1 KÜMELER Bölüm 2 SAYILAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
Bilgisayar ne elde eder (görüntüden)? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51
? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51") Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Hafta 1 Sayısal Görüntü İşlemeye Giriş ve Temel Adımlar
 BLM429 Görüntü İşlemeye Giriş Hafta 1 Sayısal Görüntü İşlemeye Giriş ve Temel Adımlar Yrd. Doç. Dr. Caner ÖZCAN Fall in love with the process, and the results will come. ~ Eric Thomas Derse Giriş Ders
BLM429 Görüntü İşlemeye Giriş Hafta 1 Sayısal Görüntü İşlemeye Giriş ve Temel Adımlar Yrd. Doç. Dr. Caner ÖZCAN Fall in love with the process, and the results will come. ~ Eric Thomas Derse Giriş Ders
Görüntü İyileştirme Teknikleri. Hafta-6
 Görüntü İyileştirme Teknikleri Hafta-6 Doç. Dr. Oğuz Güngör Karadeniz Teknik Üniversitesi Harita Mühendisliği Bölümü 6080 Trabzon ogungor@ktu.edu.tr İndisler Görüntü İyileştirme Teknikleri Radyometrik
Görüntü İyileştirme Teknikleri Hafta-6 Doç. Dr. Oğuz Güngör Karadeniz Teknik Üniversitesi Harita Mühendisliği Bölümü 6080 Trabzon ogungor@ktu.edu.tr İndisler Görüntü İyileştirme Teknikleri Radyometrik
İMGE İŞLEME Ders-7. Morfolojik İmge İşleme. Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm. (Yrd. Doç. Dr. M.
 İMGE İŞLEME Ders-7 Morfolojik İmge İşleme (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ Morfoloji Biyolojinin canlıların
İMGE İŞLEME Ders-7 Morfolojik İmge İşleme (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ Morfoloji Biyolojinin canlıların
Lineer Dönüşümler ÜNİTE. Amaçlar. İçindekiler. Yazar Öğr. Grv.Dr. Nevin ORHUN
 Lineer Dönüşümler Yazar Öğr. Grv.Dr. Nevin ORHUN ÜNİTE 7 Amaçlar Bu üniteyi çalıştıktan sonra; Vektör uzayları arasında tanımlanan belli fonksiyonları tanıyacak, özelliklerini öğrenecek, Bir dönüşümün,
Lineer Dönüşümler Yazar Öğr. Grv.Dr. Nevin ORHUN ÜNİTE 7 Amaçlar Bu üniteyi çalıştıktan sonra; Vektör uzayları arasında tanımlanan belli fonksiyonları tanıyacak, özelliklerini öğrenecek, Bir dönüşümün,
Koordinat Dönüşümleri (V )
") KOORDİNAT DÖNÜŞÜMLERİ ve FARKLI KOORDİNAT SİSTEMLERİ İLE ÇALIŞMA FieldGenius ile birden fazla koordinat sistemi arasında geçiş yaparak çalışmak mümkündür. Yaygın olarak kullanılan masaüstü harita ve CAD
KOORDİNAT DÖNÜŞÜMLERİ ve FARKLI KOORDİNAT SİSTEMLERİ İLE ÇALIŞMA FieldGenius ile birden fazla koordinat sistemi arasında geçiş yaparak çalışmak mümkündür. Yaygın olarak kullanılan masaüstü harita ve CAD
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
ÖZDEĞERLER- ÖZVEKTÖRLER
 ÖZDEĞERLER- ÖZVEKTÖRLER GİRİŞ Özdeğerler, bir matrisin orijinal yapısını görmek için kullanılan alternatif bir yoldur. Özdeğer kavramını açıklamak için öncelikle özvektör kavramı ele alınsın. Bazı vektörler
ÖZDEĞERLER- ÖZVEKTÖRLER GİRİŞ Özdeğerler, bir matrisin orijinal yapısını görmek için kullanılan alternatif bir yoldur. Özdeğer kavramını açıklamak için öncelikle özvektör kavramı ele alınsın. Bazı vektörler
Üç Boyutlu Uzayda Koordinat sistemi
 Üç Boyutlu Uzayda Koordinat sistemi Uzayda bir noktayı ifade edebilmek için ilk önce O noktasını (başlangıç noktası) ve bu noktadan geçen ve birbirine dik olan üç yönlü doğruyu seçerek sabitlememiz gerekir.
Üç Boyutlu Uzayda Koordinat sistemi Uzayda bir noktayı ifade edebilmek için ilk önce O noktasını (başlangıç noktası) ve bu noktadan geçen ve birbirine dik olan üç yönlü doğruyu seçerek sabitlememiz gerekir.
SAYISAL KARARLILIK. Zaman Uzayı Sonlu Farklar Yöntemi
 Dr. Serkan Aksoy SAYISAL KARARLILIK Sayısal çözümlerin kararlı olması zorunludur. Buna göre ZUSF çözümleri de uzay ve zamanda ayrıklaştırma kapsamında kararlı olması için kararlılık koşullarını sağlaması
Dr. Serkan Aksoy SAYISAL KARARLILIK Sayısal çözümlerin kararlı olması zorunludur. Buna göre ZUSF çözümleri de uzay ve zamanda ayrıklaştırma kapsamında kararlı olması için kararlılık koşullarını sağlaması
Matlab da Dizi ve Matrisler. Mustafa Coşar
 Matlab da Dizi ve Matrisler Mustafa Coşar MATLAB Değişkenleri Matlab da değişkenler; skaler, dizi(vektör), matris veya metin (string) türünde olabilirler. Örnek olarak: a=1; b=-3.2e3; c=22/5; metin= mustafa
Matlab da Dizi ve Matrisler Mustafa Coşar MATLAB Değişkenleri Matlab da değişkenler; skaler, dizi(vektör), matris veya metin (string) türünde olabilirler. Örnek olarak: a=1; b=-3.2e3; c=22/5; metin= mustafa
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar
 BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
İşaret ve Sistemler. Ders 1: Giriş
 İşaret ve Sistemler Ders 1: Giriş Ders 1 Genel Bakış Haberleşme sistemlerinde temel kavramlar İşaretin tanımı ve çeşitleri Spektral Analiz Fazörlerin frekans düzleminde gösterilmesi. Periyodik işaretlerin
İşaret ve Sistemler Ders 1: Giriş Ders 1 Genel Bakış Haberleşme sistemlerinde temel kavramlar İşaretin tanımı ve çeşitleri Spektral Analiz Fazörlerin frekans düzleminde gösterilmesi. Periyodik işaretlerin
AKDENİZ ÜNİVERSİTESİ. Anten Parametrelerinin Temelleri. Samet YALÇIN
 AKDENİZ ÜNİVERSİTESİ Anten Parametrelerinin Temelleri Samet YALÇIN Anten Parametrelerinin Temelleri GİRİŞ: Bir antenin parametrelerini tanımlayabilmek için anten parametreleri gereklidir. Anten performansından
AKDENİZ ÜNİVERSİTESİ Anten Parametrelerinin Temelleri Samet YALÇIN Anten Parametrelerinin Temelleri GİRİŞ: Bir antenin parametrelerini tanımlayabilmek için anten parametreleri gereklidir. Anten performansından
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ
 GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
8.Konu Vektör uzayları, Alt Uzaylar
 8.Konu Vektör uzayları, Alt Uzaylar 8.1. Düzlemde vektörler Düzlemdeki her noktası ile reel sayılardan oluşan ikilisini eşleştirebiliriz. Buna P noktanın koordinatları denir. y-ekseni P x y O dan P ye
8.Konu Vektör uzayları, Alt Uzaylar 8.1. Düzlemde vektörler Düzlemdeki her noktası ile reel sayılardan oluşan ikilisini eşleştirebiliriz. Buna P noktanın koordinatları denir. y-ekseni P x y O dan P ye
İkili (Binary) Görüntü Analizi
 Görüntü Analizi") İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü
 Mühendislikte İstatistiksel Yöntemler Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Araştırma sonuçlarının açıklanmasında frekans tablosu
Mühendislikte İstatistiksel Yöntemler Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Araştırma sonuçlarının açıklanmasında frekans tablosu
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
SÜREKLĠ OLASILIK DAĞILIMLARI
 SÜREKLĠ OLASILIK DAĞILIMLARI Sayı ekseni üzerindeki tüm noktalarda değer alabilen değişkenler, sürekli değişkenler olarak tanımlanmaktadır. Bu bölümde, sürekli değişkenlere uygun olasılık dağılımları üzerinde
SÜREKLĠ OLASILIK DAĞILIMLARI Sayı ekseni üzerindeki tüm noktalarda değer alabilen değişkenler, sürekli değişkenler olarak tanımlanmaktadır. Bu bölümde, sürekli değişkenlere uygun olasılık dağılımları üzerinde
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
7.2 Fonksiyon ve Fonksiyon Tanımları (I) Fonksiyon ve Fonksiyon Tanımları (II)
 Fonksiyon ve Fonksiyon Tanımları (II)") 7.2 Fonksiyon ve Fonksiyon Tanımları (I) Tanım kümesindeki her elemanın değer kümesinde bir ve yalnız bir görüntüsü varsa, tanım kümesinden değer kümesine olan bağıntıya fonksiyon denir. Fonksiyonu f ile
7.2 Fonksiyon ve Fonksiyon Tanımları (I) Tanım kümesindeki her elemanın değer kümesinde bir ve yalnız bir görüntüsü varsa, tanım kümesinden değer kümesine olan bağıntıya fonksiyon denir. Fonksiyonu f ile
Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü. Ders içeriği
 ANTENLER Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü Ders içeriği BÖLÜM 1: Antenler BÖLÜM 2: Antenlerin Temel Parametreleri BÖLÜM 3: Lineer Tel Antenler BÖLÜM 4: Halka Antenler
ANTENLER Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü Ders içeriği BÖLÜM 1: Antenler BÖLÜM 2: Antenlerin Temel Parametreleri BÖLÜM 3: Lineer Tel Antenler BÖLÜM 4: Halka Antenler
MAK1010 MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI
 .. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
.. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
Örnek 4.1: Tablo 2 de verilen ham verilerin aritmetik ortalamasını hesaplayınız.
 .4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
.4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
Matematikte karşılaştığınız güçlükler için endişe etmeyin. Emin olun benim karşılaştıklarım sizinkilerden daha büyüktür.
 - 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
- 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
İMGE İŞLEME Ders-2. İmge Dosya Tipleri ve Temel İşlemler. (Yrd. Doç. Dr. M. Kemal GÜLLÜ)
") İMGE İŞLEME Ders-2 İmge Dosya Tipleri ve Temel İşlemler (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ MATLAB temel bilgiler
İMGE İŞLEME Ders-2 İmge Dosya Tipleri ve Temel İşlemler (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ MATLAB temel bilgiler
İÇİNDEKİLER. BÖLÜM 1 Değişkenler ve Grafikler 1. BÖLÜM 2 Frekans Dağılımları 37
 İÇİNDEKİLER BÖLÜM 1 Değişkenler ve Grafikler 1 İstatistik 1 Yığın ve Örnek; Tümevarımcı ve Betimleyici İstatistik 1 Değişkenler: Kesikli ve Sürekli 1 Verilerin Yuvarlanması Bilimsel Gösterim Anlamlı Rakamlar
İÇİNDEKİLER BÖLÜM 1 Değişkenler ve Grafikler 1 İstatistik 1 Yığın ve Örnek; Tümevarımcı ve Betimleyici İstatistik 1 Değişkenler: Kesikli ve Sürekli 1 Verilerin Yuvarlanması Bilimsel Gösterim Anlamlı Rakamlar