Dört Rotorlu İnsansız Hava Aracı için Kayan Kipli Kontrolcü Tasarlanması Design of a Sliding Mode Controller for Quadcopter
|
|
|
- Mehmed Taş
- 7 yıl önce
- İzleme sayısı:
Transkript

1 Dört Rotorlu İnsansız Hava Aracı için Kayan Kipli Kontrolcü Tasarlanması Design of a Sliding Mode Controller for Quadcopter Ceren Cömert 1, Coşku Kasnakoğlu 1 1 Elektrik Elektronik Mühendisliği TOBB Ekonomi ve Teknoloji Üniversitesi ccomert@etu.edu.tr, kasnakoğlu@etu.edu.tr Özet Günümüzde insansız hava araçları önemli bir araştırma alanı haline gelmiştir. Arama kurtarma, ulaşım, yangın izleme, reklamcılık, gazetecilik, ordu ve savunma, fotoğrafçılık, bitki sulama ve bilimsel araştırma gibi alanlarda insansız hava araçları kullanılabilir. Kolay hareket edebilme kabiliyeti nedeniyle, dört rotorlu insansız hava araçları sıklıkla kontrol tasarımı yapılmasında kullanılır. Bu dokümanda, yükseklik ve konum kontrolü için kayan kipli kontrol tasarımı yapılmış ve elde edilen simülasyon sonuçları incelenmiştir. Tasarım yapıldıktan sonra kontrolcü katsayıları iterasyon yöntemi ile ayarlanmıştır. Ayrıca çatırtı olarak adlandırılan problem açıklanmış ve daha iyi bir kontrol sağlamak için çatırtı etkisi azaltılmıştır. Dokümanın geri kalanında bahsedilen konular hakkında daha ayrıntılı açıklamalar yapılmıştır. Abstract Nowadays, unmanned aerial vehicles became an important research area. Search and rescue, transportation, fire monitoring, commercial and journalism, military and defence, crop spraying and scientific research are some of the areas which UAVs can be used [1,2]. Because of their agile manoeuvrability, quadcopters are often used for controller designs. In this paper a sliding mode controller is developed for altitude and attitude control, and the obtained simulation results are discussed. After the design is made, coefficients are tuned by iteration method. Also a drawback called chattering effect is explained and reducted to achieve better control. The rest of the paper provides more detailed information about abovementioned topics. 1. Giriş İnsansız hava araçları, insan hayatı için tehlikeli olan ortamlarda kullanılabileceği gibi insanların fiziksel ve psikolojik limitleri ile sınırlı değildir, bu sayede karanlıkta, siste uzun süre performans gösterebilirler. Son zamanlarda dört rotorlu hava araçlarının kullanımı küçük boyutları, altı eksende hareket edebilme kabiliyeti ve esnek manevra kabiliyetleri nedeniyle artmıştır. Şekil 1 dört rotorlu insansız hava aracının üç eksende (x, y ve z) sırasıyla yaptığı yalpa, yunuslama ve sapma hareketlerini göstermektedir [3, 4]. Şekil 1: a) Yalpa, b) yunuslama ve c) sapma hareketi 2. Kayan Kipli Kontrol Gürültü, sistem dinamikleri ve parametreleri sık sık gerçek model ile kullanılan matematiksel model arasında farklılıklar oluşmasına sebep olur. Bu durum gürbüz kontrol adı verilen kontrol yönteminin geliştirilmesini gerektirmiştir. Kayan kipli kontrol de bu kontrol yöntemlerinden birisidir [5]. Kayan kipli kontrolde sistemi kayma yüzeyi olarak tanımlanan yüzey etrafında tutarak sistemin kontrolünü sağlamak amaçlanır. Denklem 1 de tanımlanan sistem göz önüne alındığında; x n = f(x) + b(x)u (1) x çıkış, u kontrolcü girişi, f(x) sınırları bilinen bir fonksiyon ve b(x) işareti ve sınırları bilinen bir fonksiyon ve λ pozitif bir sabit olmak üzere, kayma yüzeyi denklem 2 de ve hata ise denklem 3 de tanımlanmıştır [6]. s = (d/dt + λ ) n-1 *e (2) e = x- xd (3) s = + λe (4) = + λ = - (5) = f(x) + u + λe (6) Kayma yüzeyindeki değişim ( ) sıfır olarak şekilde tasarım yapıldığında eşdeğer kontrolcü girişi denklem 7 deki gibi hesaplanır. = - (x) + λ (7) η pozitif sabit olmak üzere kayma koşulu denklem 8 de verilmiştir. ( ) η s (8) 673
2 Yeni kontrolcü girişi ise denklem 9 da gösterilmektedir. u = - ksign(s) (9) sign fonksiyonu denklem 10 da gösterilen şekilde olup denklem 11 de gösterilen şekilde Lyapunov fonksiyonu seçilirse; sign(s) = 1 < 0 (10) 1 > 0 V = (s 2 ) (11) Kayma yüzeyinin türevi eşitlik 12 e verilen şekildedir Yükseklik Kontrolcüsü = -k1s k2sign(s) (12) 3. Kontrolcü Tasarımı Denklem 5 ve 12 eşitlenip denklem 13 yerine yazıldığında hesaplanan yükseklik kontrolcü girişi denklem 14 de gösterilmektedir [7]. U1 = = g U1cos(ϕ)cos(θ)/m (13) k1s + k2sign(s) + λ( ) + g - ( ) ( ) (14) Tablo 1 de yükseklik kontrolcüsüne ait katsayılar verilmiştir. Tablo 1: Yükseklik kontrolcü katsayıları k1 1 k2 12 λ Yalpa ve Yunuslama Açısı Kontrolcüleri Denklem 5 ve 12 deki kayma yüzey türevleri eşitlenip yalpa ve yunuslama açılarının ikinci dereceden türevleri yerine yazıldığında yalpa açısı için kullanılan kontrolcü girişi denklem 16 de, yunuslama açısı için kullanılan kontrolcü girişi ise denklem 18 de gösterilmektedir. ϕ = U2 θ Ω + θ ψ (15) U2 = [k1s + k2sign(s) + λ (ϕ - ϕ ) +ϕ + θ Ω - θ ψ ] (16) θ = U3 ϕ Ω + ϕ ψ (17) U3 = [k1s + k2sign(s) + λ (θ - θ ) +θ + ϕ Ω - ϕ ψ ] (18) Tablo 2 de yalpa ve yunuslama açılarının kontrolünde kullanılan katsayılar gösterilmiştir. Tablo 2: Yalpa ve yunuslama açısı kontrolcü katsayıları k1 0.2 k2 5 λ 2 Yalpa ve yunuslama açılarının kontrolü için tasarlanan MATLAB Simulink modelleri sırasıyla şekil 3 ve şekil 4 de gösterilmektedir. Yükseklik kontrolü için tasarlanan MATLAB Simulink modeli şekil 2 de gösterilmektedir. Şekil 2: Yükseklik kontrolü Simulink modeli Şekil 3: Yalpa açısı kontrolü Simulink modeli 674
3 Tablo 3 de sapma açısının kontrolünde kullanılan katsayılar gösterilmiştir. Tablo 2: Sapma açısı kontrolcü katsayıları k1 0.1 k2 16 λ Çatırtı (Chattering) Etkisinin Azaltılması Şekil 4: Yunuslama açısı kontrolü Simulink modeli 3.3. Sapma Açısı Kontrolü Sapma açısının ikinci dereceden türevi denklem 19 ve sapma açısı kontrolcü girişi denklem 20 ile ifade edilmektedir. ψ = U4 + ϕ θ (19) U4 = [k1s + k2sign(s) + λ (ψ - ψ ) + ψ ϕ θ ] (20) Sapma açısının kontrolünde şekil 5 de gösterilen Simulink modeli kullanılmıştır. Çatırtı etkisi kayan kipli kontrolcü tasarımlarında genellikle ortaya çıkan bir problemdir. Bu etkinin ortaya çıkmasındaki etmenlerden biri model tarafından ihmal edilebilen ve çatırtı adı verilen salınımlara neden olan hızlı dinamiklerdir [8]. Bu problemi çözmek için sık kullanılan yöntemlerden biri kayma yüzeyi etrafında sınır katmanı belirlemektir [9]. Bu metot sayesinde süreksiz olan sign fonksiyonuna sürekli bir yaklaşım sağlanmış olur [5]. Çatırtı etkisinin azaltılmasında en çok kullanılan fonksiyonla denklem 21 de verilen satürasyon [9] fonksiyonu ve denklem 22 de verilen sigmoid [5] fonksiyonudur. sat(s/φ) =, 1 sign( ), > 1 (21) sigmoid(s) = s/( s + ɛ) (22) Denklem 21 de φ sınır katman kalınlığını, denklem 22 deki ɛ ise pozitif sabiti ifade eder. Çatırtı etkisini azaltmak için yükseklik kontrolünde kullanılan modeldeki sign fonksiyonu sigmoid fonksiyonu ile değiştirilmiştir ve katsayıların yeniden ayarlanması gerekmemiştir. Açı kontrollerinde kullanılan modellerde ise sign fonksiyonu saturasyon fonksiyonu ile değiştirilmiş ve katsayılar tablo 4 eki gibi yeniden ayarlanmıştır. Yalpa ve yunuslama açılarında aşım çok fazla olduğundan, aşımı azaltmak için kayma yüzeyine denklem 23 de gösterildiği şekilde integralci eklenmiştir[7] s = + 2λe + λ 2 dr (23) Tablo 4: Yalpa, yunuslama ve sapma açısı kontrolcü katsayıları Yalpa Yunuslama Sapma k k λ Simülasyon Sonuçları Şekil 6 da çatırtı etkisi azaltılmadan önceki simülasyon sonuçları, şekil 7 de ise çatırtı etkisi azaltıldıktan sonraki simülasyon sonuçları verilmiştir. Şekil 5: Sapma açısı kontrolü Simulink modeli Şekillerden de anlaşılacağı gibi kayan kipli kontrolcüler istenilen referans değerini takip edebilmektedir. Çatırtı etkisi ise önemli ölçüde azaltılmıştır. 675

yalpa açısı, c)")


 yükseklik,")
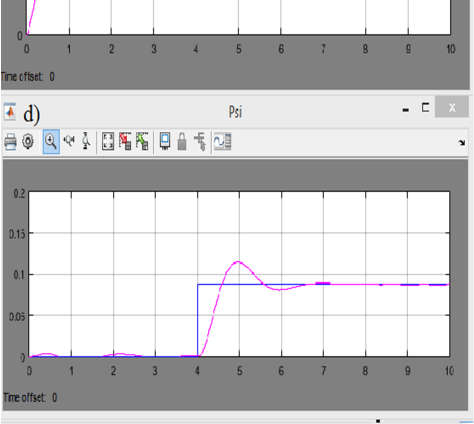
4 Şekil 6: Çatırtı etkisi azaltılmadan önce a) yükseklik, b)yalpa açısı, c) yunuslama açısı, d) sapma açısı smülasyon sonuçları Şekil 7: Çatırtı etkisi azaltıldıktan sonra a) yükseklik, b)yalpa açısı, c) yunuslama açısı, d) sapma açısı smülasyon sonuçları 676
5 5. Sonuçlar ve Gelecek Çalışmalar Bu dokümanda dört rotorlu bir insansız hava aracı için kayan kipli kontrolcü tasarımı yapılıştır. İlk olarak modeller MATLAB kullanılarak tasarlanmış, sonra katsayılar ayarlanmıştır. Sistemdeki hızlı dinamikler ve süreksizliklerden kaynaklanan çatırtı problemi azaltılmıştır. Sonuç olarak, kontrolcülerin istenilen değeri takip edebildiği ve çatırtı etkisinin azaltıldığı gözlemlenmiştir. Deneysel sonuçlar elde edebilmek için simülasyon sonuçlarının gerçek sistem üzerinde test edilmesi gelecekte yapılacak çalışmalar arasında yer almaktadır. 6. Kaynaklar [1] "Helicopters missions", erişim adresi: [2] "5 Benefits of drones (UAS) that might surprise you", erişim adresi: [3] Schmidt, M.D., "Simulation and Control of a Quadrotor Aerial Vehicle", Master s Thesis, University of Kentucky, [4] Jirinec, T., "Stabilization and Control of Unmanned Quadcopter", Master s Thesis, Czech Technical University, [5] Shtessel, Y., Edwards, C., Fridman, L. ve Levant, A., Sliding Mode Control and Observation, Springer ve Birkhauser, New York, Heidelberg, Dordrecht ve Londra, [6] Slotline, J. ve Li, W., (Wenzec J.), Applied Nonlinear Control, Prentice Hall, New Jersey, [7] Elkholy, H., "Dynamic Modelling and Control of a Quadrotor Using Linear and Nonlinear Approaches", Master s Thesis, The American University in Cario, 2014 [8] Guldner, J. ve Utkin, V., "The chattering problem in sliding mode systems" [9] Kim, Y. ve Jeon, G., "Error reduction of sliding mode controller using sigmoid type nonlinear interpolation in the boundary layer", International Journal of Control, Automation and Systems, 4, ,
1. Giriş. 2. Dört Rotorlu Hava Aracı Dinamiği 3. Kontrolör Tasarımı 4. Deneyler ve Sonuçları. 5. Sonuç
 Kayma Kipli Kontrol Yöntemi İle Dört Rotorlu Hava Aracının Kontrolü a.arisoy@hho.edu.tr TOK 1 11-13 Ekim, Niğde M. Kemal BAYRAKÇEKEN k.bayrakceken@hho.edu.tr Hava Harp Okulu Elektronik Mühendisliği Bölümü
Kayma Kipli Kontrol Yöntemi İle Dört Rotorlu Hava Aracının Kontrolü a.arisoy@hho.edu.tr TOK 1 11-13 Ekim, Niğde M. Kemal BAYRAKÇEKEN k.bayrakceken@hho.edu.tr Hava Harp Okulu Elektronik Mühendisliği Bölümü
Döngüde Donanımsal Benzetim Test Platformu Kullanarak Otopilot Tasarımı. Autopilot Design Using Hardware-in-the-Loop Test Platform
 Döngüde Donanımsal Benzetim Test Platformu Kullanarak Otopilot Tasarımı Autopilot Design Using Hardware-in-the-Loop Test Platform Şeyma Akyürek 1, Gizem Sezin Özden 1, Emre Atlas 1, Ünver Kaynak 2, Coşku
Döngüde Donanımsal Benzetim Test Platformu Kullanarak Otopilot Tasarımı Autopilot Design Using Hardware-in-the-Loop Test Platform Şeyma Akyürek 1, Gizem Sezin Özden 1, Emre Atlas 1, Ünver Kaynak 2, Coşku
Mikro İHA nın Gerçek Zamanlı Yörünge Kontrolü
 Mikro İHA nın Gerçek Zamanlı Yörünge Kontrolü Kamil Orman 1, Adnan Derdiyok 2 1 Elektronik ve Otomasyon Bölümü, MYO Erzincan Üniversitesi, Erzincan korman@erzincan.edu.tr 2 Elektrik-Elektronik Mühendisliği
Mikro İHA nın Gerçek Zamanlı Yörünge Kontrolü Kamil Orman 1, Adnan Derdiyok 2 1 Elektronik ve Otomasyon Bölümü, MYO Erzincan Üniversitesi, Erzincan korman@erzincan.edu.tr 2 Elektrik-Elektronik Mühendisliği
DÖRT ROTORLU İNSANSIZ HAVA ARACI İÇİN DENGELEYİCİ OTOPİLOT TASARIMI
 TOK 2014 Bildiri Kitabı 11-13 Eylül 2014, Kocaeli DÖRT ROTORLU İNSANSIZ HAVA ARACI İÇİN DENGELEYİCİ OTOPİLOT TASARIMI Övünç Elbir1, Coşku Kasnakoğlu1 Elektrik ve Elektronik Mühendisliği Bölümü TOBB Ekonomi
TOK 2014 Bildiri Kitabı 11-13 Eylül 2014, Kocaeli DÖRT ROTORLU İNSANSIZ HAVA ARACI İÇİN DENGELEYİCİ OTOPİLOT TASARIMI Övünç Elbir1, Coşku Kasnakoğlu1 Elektrik ve Elektronik Mühendisliği Bölümü TOBB Ekonomi
DÖRT ROTORLU BİR İNSANSIZ HAVA ARACININ GERİ- ADIMLAMA YÖNTEMİ İLE YOL TAKİBİ KONTROLÜ
 DOI 10.7603/s40690-014-0010-4 Dört-Rotorlu Bir İnsansız Hava Aracının Geri-Adımlama Yöntemi İle Yol Takibi Kontrolü HAVACILIK VE UZAY TEKNOLOJİLERİ DERGİSİ TEMMUZ 2014 CİLT 7 SAYI 2 (1-13) DÖRT ROTORLU
DOI 10.7603/s40690-014-0010-4 Dört-Rotorlu Bir İnsansız Hava Aracının Geri-Adımlama Yöntemi İle Yol Takibi Kontrolü HAVACILIK VE UZAY TEKNOLOJİLERİ DERGİSİ TEMMUZ 2014 CİLT 7 SAYI 2 (1-13) DÖRT ROTORLU
Döner Kanat İnsansız Hava Aracının Dinamik Modellenmesi ve Benzetimi
 Döner Kanat İnsansız Hava Aracının Dinamik Modellenmesi ve Benzetimi İrfan Ökten 1, Hakan Üçgün 1, Uğur Yüzgeç 1, Metin Kesler 1 1 Bilecik Şeyh Edebali Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği
Döner Kanat İnsansız Hava Aracının Dinamik Modellenmesi ve Benzetimi İrfan Ökten 1, Hakan Üçgün 1, Uğur Yüzgeç 1, Metin Kesler 1 1 Bilecik Şeyh Edebali Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği
DÖRT ROTORLU HAVA ARACI İÇİN GERÇEK ZAMANDA YAPAY SİNİR AĞLARI İLE KONTROLÖR TASARIMI
 HAVACILIK VE UZAY TEKNOLOJİLERİ DERGİSİ TEMMUZ 2013 CİLT 6 SAYI 2 (1-7) DÖRT ROTORLU HAVA ARACI İÇİN GERÇEK ZAMANDA YAPAY SİNİR AĞLARI İLE KONTROLÖR TASARIMI Mustafa ALBAYRAK * Hava Harp Okulu HUTEN, Elektronik
HAVACILIK VE UZAY TEKNOLOJİLERİ DERGİSİ TEMMUZ 2013 CİLT 6 SAYI 2 (1-7) DÖRT ROTORLU HAVA ARACI İÇİN GERÇEK ZAMANDA YAPAY SİNİR AĞLARI İLE KONTROLÖR TASARIMI Mustafa ALBAYRAK * Hava Harp Okulu HUTEN, Elektronik
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
Dört Rotorlu Hava Aracının (Quadrotor) Durum Kontrolü İçin Donanımlı Simülatör Düzeneği Kurulması
 Durum Kontrolü İçin Donanımlı Simülatör Düzeneği Kurulması") Dört Rotorlu Hava Aracının (Quadrotor) Durum Kontrolü İçin Donanımlı Simülatör Düzeneği Kurulması M.Kemal Bayrakçeken, Aydemir Arısoy Elektronik Mühendisliği Bölümü, Hava Harp Okulu, Yeşilyurt İstanbul
Dört Rotorlu Hava Aracının (Quadrotor) Durum Kontrolü İçin Donanımlı Simülatör Düzeneği Kurulması M.Kemal Bayrakçeken, Aydemir Arısoy Elektronik Mühendisliği Bölümü, Hava Harp Okulu, Yeşilyurt İstanbul
MAK 305 MAKİNE ELEMANLARI-1
 MAK 305 MAKİNE ELEMANLARI-1 Toleranslar ve Yüzey Kalitesi Doç. Dr. Ali Rıza Yıldız 1 BU DERS SUNUMUNDAN EDİNİLMESİ BEKLENEN BİLGİLER Tolerans kavramının anlaşılması ISO Tolerans Sistemi Geçmeler Toleransın
MAK 305 MAKİNE ELEMANLARI-1 Toleranslar ve Yüzey Kalitesi Doç. Dr. Ali Rıza Yıldız 1 BU DERS SUNUMUNDAN EDİNİLMESİ BEKLENEN BİLGİLER Tolerans kavramının anlaşılması ISO Tolerans Sistemi Geçmeler Toleransın
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
QUANTILE REGRESYON * Quantile Regression
 QUANTILE REGRESYON * Quantile Regression Fikriye KURTOĞLU İstatistik Anabilim Dalı Olcay ARSLAN İstatistik Anabilim Dalı ÖZET Bu çalışmada, Lineer Regresyon analizinde kullanılan en küçük kareler yöntemine
QUANTILE REGRESYON * Quantile Regression Fikriye KURTOĞLU İstatistik Anabilim Dalı Olcay ARSLAN İstatistik Anabilim Dalı ÖZET Bu çalışmada, Lineer Regresyon analizinde kullanılan en küçük kareler yöntemine
Dört Rotorlu bir İHA nın Geri Adımlamalı Kontrolcü ile Gerçek Zamanlı Yörünge Kontrolü
 Araştırma Makalesi / Research Article Iğdır Üni. Fen Bilimleri Enst. Der. / Iğdır Univ. J. Inst. Sci. & Tech. 6(3): 77-85, 6 Iğdır Üniversitesi Fen Bilimleri Enstitüsü Dergisi Iğdır University Journal
Araştırma Makalesi / Research Article Iğdır Üni. Fen Bilimleri Enst. Der. / Iğdır Univ. J. Inst. Sci. & Tech. 6(3): 77-85, 6 Iğdır Üniversitesi Fen Bilimleri Enstitüsü Dergisi Iğdır University Journal
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Altın Oran (Golden Section Search) Arama Metodu Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Altın Oran (Golden Section Search) Arama Metodu Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f
Sabit Kanatlı İHA için Çevik Kontrolcü Tasarımı ve Uçuş Denemeleri Controller Design for Agile Maneuvering Fixed-Wing UAV and Flight Tests
 Sabit Kanatlı İHA için Çevik Kontrolcü Tasarımı ve Uçuş Denemeleri Controller Design for Agile Maneuvering Fixed-Wing UAV and Flight Tests Ferit ÇAKICI 1, M. Kemal Leblebicioğlu 2 1 Elektrik-Elektronik
Sabit Kanatlı İHA için Çevik Kontrolcü Tasarımı ve Uçuş Denemeleri Controller Design for Agile Maneuvering Fixed-Wing UAV and Flight Tests Ferit ÇAKICI 1, M. Kemal Leblebicioğlu 2 1 Elektrik-Elektronik
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
ÇOKLU MODEL GEÇİŞ TABANLI ABS TASARIMI: 1. KISIM KONTROLCÜ TASARIMI
 OTEKON 1 7. Otomotiv Teknolojileri Kongresi 2 27 Mayıs 21, BURSA ÇOKLU MODEL GEÇİŞ TABANLI ABS TASARIMI: 1. KISIM KONTROLCÜ TASARIMI Morteza Dousti, S.Çağlar Başlamışlı Hacettepe Üniversitesi, Mühendislik
OTEKON 1 7. Otomotiv Teknolojileri Kongresi 2 27 Mayıs 21, BURSA ÇOKLU MODEL GEÇİŞ TABANLI ABS TASARIMI: 1. KISIM KONTROLCÜ TASARIMI Morteza Dousti, S.Çağlar Başlamışlı Hacettepe Üniversitesi, Mühendislik
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI
 HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI Emre SERT Anadolu Isuzu Otomotiv A.Ş 1. Giriş Özet Ticari araç kazalarının çoğu devrilme ile sonuçlanmaktadır bu nedenle devrilme
HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI Emre SERT Anadolu Isuzu Otomotiv A.Ş 1. Giriş Özet Ticari araç kazalarının çoğu devrilme ile sonuçlanmaktadır bu nedenle devrilme
DENEY 2 Sistem Benzetimi
 DENEY Sistem Benzetimi DENEYİN AMACI. Diferansiyel denklem kullanarak, fiziksel bir sistemin nasıl tanımlanacağını öğrenmek.. Fiziksel sistemlerin karakteristiklerini anlamak amacıyla diferansiyel denklem
DENEY Sistem Benzetimi DENEYİN AMACI. Diferansiyel denklem kullanarak, fiziksel bir sistemin nasıl tanımlanacağını öğrenmek.. Fiziksel sistemlerin karakteristiklerini anlamak amacıyla diferansiyel denklem
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU
 METODU") ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
Hayriye Tuğba Sekban, Kaan Can, Abdullah Başçi. Elektrik-Elektronik Mühendisliği Bölümü Atatürk Üniversitesi, Erzurum
 İkili Tank Sıvı-Seviye Sisteminin PI ve Geri Adımlamalı Kontrol Yöntemleri ile Kontrolü ve Performans Analizi The Performance Analyze and Control of a Coupled Tank Liquid-Level System via PI & Backstepping
İkili Tank Sıvı-Seviye Sisteminin PI ve Geri Adımlamalı Kontrol Yöntemleri ile Kontrolü ve Performans Analizi The Performance Analyze and Control of a Coupled Tank Liquid-Level System via PI & Backstepping
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU
 RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
Altın Oran Arama Metodu(Golden Search)
") Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
POSITION DETERMINATION BY USING IMAGE PROCESSING METHOD IN INVERTED PENDULUM
 POSITION DETERMINATION BY USING IMAGE PROCESSING METHOD IN INVERTED PENDULUM Melih KUNCAN Siirt Üniversitesi, Mühendislik-Mimarlık Fakültesi, Mekatronik Mühendisliği Bölümü, Siirt, TÜRKIYE melihkuncan@siirt.edu.tr
POSITION DETERMINATION BY USING IMAGE PROCESSING METHOD IN INVERTED PENDULUM Melih KUNCAN Siirt Üniversitesi, Mühendislik-Mimarlık Fakültesi, Mekatronik Mühendisliği Bölümü, Siirt, TÜRKIYE melihkuncan@siirt.edu.tr
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Sistem Dinamiği ve Simülasyon
 Sistem Dinamiği ve Simülasyon Yrd.Doç.Dr. Meral BAYRAKTAR Makine Teorisi Sistem Dinamiği ve Kontrol Anabilim Dalı 1 DERS DÜZEND ZENİ Ders Sorumlusu Ders Saati : Yrd.Doç.Dr. Meral Bayraktar : Persembe 14:00-16:00
Sistem Dinamiği ve Simülasyon Yrd.Doç.Dr. Meral BAYRAKTAR Makine Teorisi Sistem Dinamiği ve Kontrol Anabilim Dalı 1 DERS DÜZEND ZENİ Ders Sorumlusu Ders Saati : Yrd.Doç.Dr. Meral Bayraktar : Persembe 14:00-16:00
AKTĐF KÜTLE SÖNÜMLEYĐCĐLĐ ÇOK SERBESTLĐK DERECELĐ BĐR YAPININ DEPREME KARŞI LQR KONTROLÜ
 AKTĐF KÜTLE SÖNÜMLEYĐCĐLĐ ÇOK SERBESTLĐK DERECELĐ BĐR YAPININ DEPREME KARŞI LQR KONTROLÜ Nurkan Yağız*, Rahmi GÜÇLÜ** ve Đsmail YÜKSEK** *Đstanbul Üniversitesi, Makine Mühendisliği Bölümü, Avcılar, Đstanbul
AKTĐF KÜTLE SÖNÜMLEYĐCĐLĐ ÇOK SERBESTLĐK DERECELĐ BĐR YAPININ DEPREME KARŞI LQR KONTROLÜ Nurkan Yağız*, Rahmi GÜÇLÜ** ve Đsmail YÜKSEK** *Đstanbul Üniversitesi, Makine Mühendisliği Bölümü, Avcılar, Đstanbul
İnsansız Hava Araçları için Çift Telli Sarkaç Kullanarak Atalet Momentlerinin Hesaplanması ve Otopilot Tasarımı
 İnsansız Hava Araçları için Çift Telli Sarkaç Kullanarak Atalet Momentlerinin Hesaplanması ve Otopilot Tasarımı Şeyma Akyürek 1, Anıl Güçlü 2, Ünver Kaynak 3, Coşku Kasnakoğlu 4 1 Elektrik-Elektronik Mühendisliği
İnsansız Hava Araçları için Çift Telli Sarkaç Kullanarak Atalet Momentlerinin Hesaplanması ve Otopilot Tasarımı Şeyma Akyürek 1, Anıl Güçlü 2, Ünver Kaynak 3, Coşku Kasnakoğlu 4 1 Elektrik-Elektronik Mühendisliği
BELĐRLĐ BĐR SIKMA KUVVETĐ ETKĐSĐNDE BĐSĐKLET FREN KOLU KUVVET ANALĐZĐNĐN YAPILMASI
 tasarım BELĐRLĐ BĐR SIKMA KUVVETĐ ETKĐSĐNDE BĐSĐKLET FREN KOLU KUVVET ANALĐZĐNĐN YAPILMASI Nihat GEMALMAYAN, Hüseyin ĐNCEÇAM Gazi Üniversitesi, Makina Mühendisliği Bölümü GĐRĐŞ Đlk bisikletlerde fren sistemi
tasarım BELĐRLĐ BĐR SIKMA KUVVETĐ ETKĐSĐNDE BĐSĐKLET FREN KOLU KUVVET ANALĐZĐNĐN YAPILMASI Nihat GEMALMAYAN, Hüseyin ĐNCEÇAM Gazi Üniversitesi, Makina Mühendisliği Bölümü GĐRĐŞ Đlk bisikletlerde fren sistemi
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
DÖRT ROTORLU İHA İÇİN H LOOP SHAPE YÖNTEMİ İLE DENGELEYİCİ OTOPİLOT TASARIMI
 DÖRT ROTORLU İHA İÇİN H LOOP SHAPE YÖNTEMİ İLE DENGELEYİCİ OTOPİLOT TASARIMI Övünç Elir 1, Hüseyin Yıldız 1,2, Coşku Kasnakoğlu 1 1 Elektrik ve Elektronik Mühendisliği Bölümü TOBB Ekonomi ve Teknoloji
DÖRT ROTORLU İHA İÇİN H LOOP SHAPE YÖNTEMİ İLE DENGELEYİCİ OTOPİLOT TASARIMI Övünç Elir 1, Hüseyin Yıldız 1,2, Coşku Kasnakoğlu 1 1 Elektrik ve Elektronik Mühendisliği Bölümü TOBB Ekonomi ve Teknoloji
Sabit Kanatlı İnsansız Hava Araçları için Döngüde Donanımsal Benzetim Tasarımı ve Gerçeklenme Sonuçları
 Sabit Kanatlı İnsansız Hava Araçları için Döngüde Donanımsal Benzetim Tasarımı ve Gerçeklenme Sonuçları Design of a Hardware-in-the-Loop Test Platform for a Fixed Wing Unmanned Aerial Vehicle and Simulation
Sabit Kanatlı İnsansız Hava Araçları için Döngüde Donanımsal Benzetim Tasarımı ve Gerçeklenme Sonuçları Design of a Hardware-in-the-Loop Test Platform for a Fixed Wing Unmanned Aerial Vehicle and Simulation
DİKEY İNİŞ-KALKIŞ YAPABİLEN DÖRT ROTORLU HAVA ARACININ(QUADROTOR) UÇUŞ KONTROLÜ
 UÇUŞ KONTROLÜ") HAVACILIK VE ZAY TEKNOLOJİLERİ DERGİSİ OCAK CİLT 4 SAYI (-4) DİKEY İNİŞ-KALKIŞ YAPABİLEN DÖRT ROTORL HAVA ARACININ(QADROTOR) ÇŞ KONTROLÜ Hv.Plt. Ütğm. İ. Can DİKMEN* HHO Havacılık ve zay Teknolojileri
HAVACILIK VE ZAY TEKNOLOJİLERİ DERGİSİ OCAK CİLT 4 SAYI (-4) DİKEY İNİŞ-KALKIŞ YAPABİLEN DÖRT ROTORL HAVA ARACININ(QADROTOR) ÇŞ KONTROLÜ Hv.Plt. Ütğm. İ. Can DİKMEN* HHO Havacılık ve zay Teknolojileri
DENEY 2 KESME HIZININ YÜZEY PÜRÜZLÜLÜĞÜNE ETKİSİNİN İNCELENMESİ
 Kesme Hızının Yüzey Pürüzlülüğüne Etkisinin İncelenmesi 1/5 DENEY 2 KESME HIZININ YÜZEY PÜRÜZLÜLÜĞÜNE ETKİSİNİN İNCELENMESİ 1. AMAÇ Bu deneyin amacı; üretilen parçaların yüzey pürüzlülüğünü belirlemek
Kesme Hızının Yüzey Pürüzlülüğüne Etkisinin İncelenmesi 1/5 DENEY 2 KESME HIZININ YÜZEY PÜRÜZLÜLÜĞÜNE ETKİSİNİN İNCELENMESİ 1. AMAÇ Bu deneyin amacı; üretilen parçaların yüzey pürüzlülüğünü belirlemek
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
Eleco 2014 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, Kasım 2014, Bursa
 Sürekli Mıknatıslı Senkron Motorun İkinci Dereceden Kayan Kip Gözlemleyici İle Sensörsüz Kontrolü Second Order Sliding Mode Observer Sensorless Control Of Permanent Magnet Synchronous Motor Fuat KILIÇ
Sürekli Mıknatıslı Senkron Motorun İkinci Dereceden Kayan Kip Gözlemleyici İle Sensörsüz Kontrolü Second Order Sliding Mode Observer Sensorless Control Of Permanent Magnet Synchronous Motor Fuat KILIÇ
MD9 electricity ELEKTİRİKLİ OTOBÜS PROJESİ
 II. AR-GE MERKEZLERİ İYİ UYGULAMA ÖRNEKLERİ ZİRVESİ KAMU-ÜNİVERSİTE -SANAYİ İŞBİRLİĞİ MD9 electricity ELEKTİRİKLİ OTOBÜS PROJESİ TEMSA ULAŞIM ARAÇLARI SAN. VE TİC. A.Ş. ÜNİVERSİTE-SANAYİ İŞBİRLİĞİ DESTEKLİ
II. AR-GE MERKEZLERİ İYİ UYGULAMA ÖRNEKLERİ ZİRVESİ KAMU-ÜNİVERSİTE -SANAYİ İŞBİRLİĞİ MD9 electricity ELEKTİRİKLİ OTOBÜS PROJESİ TEMSA ULAŞIM ARAÇLARI SAN. VE TİC. A.Ş. ÜNİVERSİTE-SANAYİ İŞBİRLİĞİ DESTEKLİ
KAYMA KİPLİ KONTROLÖRLERDE KAYMA YÜZEYİ TASARIMI YÖNTEMLERİNİN İNCELENMESİ VE SINIFLANDIRILMASI
 KAYMA KİPLİ KONTROLÖRLERDE KAYMA YÜZEYİ TASARIMI YÖNTEMLERİNİN İNCELENMESİ VE SINIFLANDIRILMASI Pamukkale Üniversitesi Fen Bilimleri Enstitüsü Yüksek Lisans Tezi Bilgisayar Mühendisliği Ana Bilim Dalı
KAYMA KİPLİ KONTROLÖRLERDE KAYMA YÜZEYİ TASARIMI YÖNTEMLERİNİN İNCELENMESİ VE SINIFLANDIRILMASI Pamukkale Üniversitesi Fen Bilimleri Enstitüsü Yüksek Lisans Tezi Bilgisayar Mühendisliği Ana Bilim Dalı
FLAP TİPİNDEKİ DENETİM YÜZEYLERİ İÇİN ANTAGONİSTİK TİP ŞEKİL BELLEKLİ ALAŞIMLI BİR EYLETİCİ TASARIMI
 III. ULUSAL HAVACILIK VE UZAY KONFERANSI 16-18 Eylül 21, Anadolu Üniversitesi, Eskişehir FLAP TİPİNDEKİ DENETİM YÜZEYLERİ İÇİN ANTAGONİSTİK TİP ŞEKİL BELLEKLİ ALAŞIMLI BİR EYLETİCİ TASARIMI Burcu DÖNMEZ
III. ULUSAL HAVACILIK VE UZAY KONFERANSI 16-18 Eylül 21, Anadolu Üniversitesi, Eskişehir FLAP TİPİNDEKİ DENETİM YÜZEYLERİ İÇİN ANTAGONİSTİK TİP ŞEKİL BELLEKLİ ALAŞIMLI BİR EYLETİCİ TASARIMI Burcu DÖNMEZ
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
Bulanık Mantık Tabanlı Uçak Modeli Tespiti
 Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
Öğrenci No Ad ve Soyad İmza DENEY 3. Tümleşik Devre Ortak Source Yükselteci
 Öğrenci No Ad ve Soyad İmza Masa No DENEY 3 Tümleşik Devre Ortak Source Yükselteci Not: Solda gösterilen devre Temel Yarı İletken Elemanlar dersi laboratuvarında yaptığınız 5. deneye ilişkin devre olup,
Öğrenci No Ad ve Soyad İmza Masa No DENEY 3 Tümleşik Devre Ortak Source Yükselteci Not: Solda gösterilen devre Temel Yarı İletken Elemanlar dersi laboratuvarında yaptığınız 5. deneye ilişkin devre olup,
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
DÖRT ROTORLU BİR İNSANSIZ HAVA ARACININ İRTİFA KESTİRİMİ
 VI. ULUSAL HAVACILIK VE UZAY KONFERANSI 28-30 Eylül 2016, Kocaeli Üniversitesi, Kocaeli DÖRT ROTORLU BİR İNSANSIZ HAVA ARACININ İRTİFA KESTİRİMİ İlkay Gümüşboğa 1 Anadolu Üniversitesi Havacılık ve Uzay
VI. ULUSAL HAVACILIK VE UZAY KONFERANSI 28-30 Eylül 2016, Kocaeli Üniversitesi, Kocaeli DÖRT ROTORLU BİR İNSANSIZ HAVA ARACININ İRTİFA KESTİRİMİ İlkay Gümüşboğa 1 Anadolu Üniversitesi Havacılık ve Uzay
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
PİEZOELEKTRİK YAMALARIN AKILLI BİR KİRİŞİN TİTREŞİM ÖZELLİKLERİNİN BULUNMASINDA ALGILAYICI OLARAK KULLANILMASI ABSTRACT
 PİEZOELEKTRİK YAMALARIN AKILLI BİR KİRİŞİN TİTREŞİM ÖZELLİKLERİNİN BULUNMASINDA ALGILAYICI OLARAK KULLANILMASI Uğur Arıdoğan (a), Melin Şahin (b), Volkan Nalbantoğlu (c), Yavuz Yaman (d) (a) HAVELSAN A.Ş.,
PİEZOELEKTRİK YAMALARIN AKILLI BİR KİRİŞİN TİTREŞİM ÖZELLİKLERİNİN BULUNMASINDA ALGILAYICI OLARAK KULLANILMASI Uğur Arıdoğan (a), Melin Şahin (b), Volkan Nalbantoğlu (c), Yavuz Yaman (d) (a) HAVELSAN A.Ş.,
Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok
 Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
Plazma İletiminin Optimal Kontrolü Üzerine
 Plazma İletiminin Optimal Kontrolü Üzerine 1 Yalçın Yılmaz, 2 İsmail Küçük ve 3 Faruk Uygul *1 Faculty of Arts and Sciences, Dept. of Mathematics, Sakaya University, Sakarya, Turkey 2 Faculty of Chemical
Plazma İletiminin Optimal Kontrolü Üzerine 1 Yalçın Yılmaz, 2 İsmail Küçük ve 3 Faruk Uygul *1 Faculty of Arts and Sciences, Dept. of Mathematics, Sakaya University, Sakarya, Turkey 2 Faculty of Chemical
BOŞTA HAREKET DOĞRUSALSIZLIĞI BULUNAN, GÖREVE UYUMLU KONTROL YÜZEYLERİNİN ÇIRPMA YÖNÜNDEN İNCELENMESİ
 16. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU Atatürk Üniversitesi, Mühendislik Fakültesi, 12-13 Eylül, 2013 BOŞTA HAREKET DOĞRUSALSIZLIĞI BULUNAN, GÖREVE UYUMLU KONTROL YÜZEYLERİNİN ÇIRPMA YÖNÜNDEN İNCELENMESİ
16. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU Atatürk Üniversitesi, Mühendislik Fakültesi, 12-13 Eylül, 2013 BOŞTA HAREKET DOĞRUSALSIZLIĞI BULUNAN, GÖREVE UYUMLU KONTROL YÜZEYLERİNİN ÇIRPMA YÖNÜNDEN İNCELENMESİ
Sigma 32, 97-108, 2014 Research Article / Araştırma Makalesi FUZZY CONTROL AND SLİDİNG MODE FUZZY CONTROL OF DC MOTOR
 Journal of Engineering and Natural Sciences Mühendislik ve Fen Bilimleri Dergisi Sigma 32, 97-18, 214 Research Article / Araştırma Makalesi FUZZY CONTROL AND SLİDİNG MODE FUZZY CONTROL OF DC MOTOR Basri
Journal of Engineering and Natural Sciences Mühendislik ve Fen Bilimleri Dergisi Sigma 32, 97-18, 214 Research Article / Araştırma Makalesi FUZZY CONTROL AND SLİDİNG MODE FUZZY CONTROL OF DC MOTOR Basri
Örnek. Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız.
 Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
YORULMA ANALİZLERİNDE ARAÇ DİNAMİĞİ MODELLERİNİN KULLANIMI
 OTEKON 2010 5. Otomotiv Teknolojileri Kongresi 07 08 Haziran 2010, BURSA YORULMA ANALİZLERİNDE ARAÇ DİNAMİĞİ MODELLERİNİN KULLANIMI Anıl Yılmaz, Namık Kılıç Otokar Otomotiv ve Savunma Sanayi A.Ş., SAKARYA
OTEKON 2010 5. Otomotiv Teknolojileri Kongresi 07 08 Haziran 2010, BURSA YORULMA ANALİZLERİNDE ARAÇ DİNAMİĞİ MODELLERİNİN KULLANIMI Anıl Yılmaz, Namık Kılıç Otokar Otomotiv ve Savunma Sanayi A.Ş., SAKARYA
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
AERODİNAMİK KUVVETLER
 AERODİNAMİK KUVVETLER Prof.Dr. Mustafa Cavcar Anadolu Üniversitesi, Sivil Havacılık Yüksekokulu, 26470 Eskişehir Bir uçak üzerinde meydana gelen aerodinamik kuvvetlerin bileşkesi ( ); uçağın etrafından
AERODİNAMİK KUVVETLER Prof.Dr. Mustafa Cavcar Anadolu Üniversitesi, Sivil Havacılık Yüksekokulu, 26470 Eskişehir Bir uçak üzerinde meydana gelen aerodinamik kuvvetlerin bileşkesi ( ); uçağın etrafından
11. Sunum: İki Kapılı Devreler. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 11. Sunum: İki Kapılı Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş İki kapılı devreler giriş akımları ve gerilimleri ve çıkış akımları
11. Sunum: İki Kapılı Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş İki kapılı devreler giriş akımları ve gerilimleri ve çıkış akımları
LİNEER DALGA TEORİSİ. Page 1
 LİNEER DALGA TEORİSİ Giriş Dalgalar, gerçekte viskoz akışkan içinde, irregüler ve değişken geçirgenliğe sahip bir taban üzerinde ilerlerler. Ancak, çoğu zaman akışkan hareketi neredeyse irrotasyoneldir.
LİNEER DALGA TEORİSİ Giriş Dalgalar, gerçekte viskoz akışkan içinde, irregüler ve değişken geçirgenliğe sahip bir taban üzerinde ilerlerler. Ancak, çoğu zaman akışkan hareketi neredeyse irrotasyoneldir.
Mühendislik ve Fen Bilimleri Dergisi Journal of Engineering and Natural Sciences
 Mühendislik ve Fen Bilimleri Dergisi Journal of Engineering and Natural Sciences Sigma 5 39-50, 03 Araştırma Makalesi / Research Article YAPAY SİNİR AĞLI KAYAN KİPLİ KONTROLÜN DÖNEL TERS SARKAÇ SİSTEMİNE
Mühendislik ve Fen Bilimleri Dergisi Journal of Engineering and Natural Sciences Sigma 5 39-50, 03 Araştırma Makalesi / Research Article YAPAY SİNİR AĞLI KAYAN KİPLİ KONTROLÜN DÖNEL TERS SARKAÇ SİSTEMİNE
SES-ÜSTÜ KANARD KONTROLLÜ FÜZELER İÇİN SERBEST DÖNEN KUYRUĞUN ŞEKİL OPTİMİZASYONU
 VI. ULUSAL HAVACILIK VE UZAY KONFERANSI 28-30 Eylül 2016, Kocaeli Üniversitesi, Kocaeli UHUK-2016-116 SES-ÜSTÜ KANARD KONTROLLÜ FÜZELER İÇİN SERBEST DÖNEN KUYRUĞUN ŞEKİL OPTİMİZASYONU Erhan Feyzioğlu 1
VI. ULUSAL HAVACILIK VE UZAY KONFERANSI 28-30 Eylül 2016, Kocaeli Üniversitesi, Kocaeli UHUK-2016-116 SES-ÜSTÜ KANARD KONTROLLÜ FÜZELER İÇİN SERBEST DÖNEN KUYRUĞUN ŞEKİL OPTİMİZASYONU Erhan Feyzioğlu 1
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
SAYISAL KONTROL 2 PROJESİ
 SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
Dört Rotorlu Döner Kanat İnsansız Hava Aracı Test Düzeneği Geliştirilmesi
 Dört Rotorlu Döner Kanat İnsansız Hava Aracı Test Düzeneği Geliştirilmesi Hakan Üçgün 1, İrfan Ökten 1, Uğur Yüzgeç 1, Metin Kesler 1 1 Bilecik Şeyh Edebali Üniversitesi, Mühendislik Fakültesi, Bilgisayar
Dört Rotorlu Döner Kanat İnsansız Hava Aracı Test Düzeneği Geliştirilmesi Hakan Üçgün 1, İrfan Ökten 1, Uğur Yüzgeç 1, Metin Kesler 1 1 Bilecik Şeyh Edebali Üniversitesi, Mühendislik Fakültesi, Bilgisayar
İNSANSIZ HAVA ARACI PERVANELERİNİN TASARIM, ANALİZ VE TEST YETENEKLERİNİN GELİŞTİRİLMESİ
 IV. ULUSAL HAVACILIK VE UZAY KONFERANSI 12-14 Eylül 212, Hava Harp Okulu, İstanbul İNSANSIZ HAVA ARACI PERVANELERİNİN TASARIM, ANALİZ VE TEST YETENEKLERİNİN GELİŞTİRİLMESİ Oğuz Kaan ONAY *, Javid KHALILOV,
IV. ULUSAL HAVACILIK VE UZAY KONFERANSI 12-14 Eylül 212, Hava Harp Okulu, İstanbul İNSANSIZ HAVA ARACI PERVANELERİNİN TASARIM, ANALİZ VE TEST YETENEKLERİNİN GELİŞTİRİLMESİ Oğuz Kaan ONAY *, Javid KHALILOV,
KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM
 KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM M.Ali Akcayol Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü (Yüksek Lisans Tezinden Bir Bölüm) Şekil 1'
KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM M.Ali Akcayol Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü (Yüksek Lisans Tezinden Bir Bölüm) Şekil 1'
Kontrol Sistemlerinin Tasarımı
 Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım II PD Denetleyici ve Faz İlerletici Dengeleyici 1 Ardarda (Kaskat) bağlantı kullanılarak geri beslemeli sistemin geçici rejim cevabının iyileştirilmesi
Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım II PD Denetleyici ve Faz İlerletici Dengeleyici 1 Ardarda (Kaskat) bağlantı kullanılarak geri beslemeli sistemin geçici rejim cevabının iyileştirilmesi
T.C. İZMİR KÂTİP ÇELEBİ ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ KOORDİNASYON BİRİMİ
 T.C. İZMİR KÂTİP ÇELEBİ ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ KOORDİNASYON BİRİMİ PROJE BAŞLIĞI Mühendislik Problemlerinin Bilgisayar Destekli Çözümleri Proje No:2013-2-FMBP-73 Proje Türü ÖNAP SONUÇ
T.C. İZMİR KÂTİP ÇELEBİ ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ KOORDİNASYON BİRİMİ PROJE BAŞLIĞI Mühendislik Problemlerinin Bilgisayar Destekli Çözümleri Proje No:2013-2-FMBP-73 Proje Türü ÖNAP SONUÇ
Aktif Titreşim Kontrolü için Bir Yapının Sonlu Elemanlar Yöntemi ile Modelinin Elde Edilmesi ve PID, PPF Kontrolcü Tasarımları
 Uluslararası Katılımlı 17. Makina Teorisi Sempozyumu, İzmir, 1-17 Haziran 15 Aktif Titreşim Kontrolü için Bir Yapının Sonlu Elemanlar Yöntemi ile Modelinin Elde Edilmesi ve PID, PPF Kontrolcü Tasarımları
Uluslararası Katılımlı 17. Makina Teorisi Sempozyumu, İzmir, 1-17 Haziran 15 Aktif Titreşim Kontrolü için Bir Yapının Sonlu Elemanlar Yöntemi ile Modelinin Elde Edilmesi ve PID, PPF Kontrolcü Tasarımları
3. V, R 3 ün açık bir altkümesi olmak üzere, c R. p noktasında yüzeye dik olduğunu gösteriniz.(10
 Diferenisyel Geometri 2 Yazokulu 2010 AdıSoyadı: No : 1. ϕ (u, v) = ( u + 2v, v + 2u, u 2 v ) parametrizasyonu ile verilen M kümesinin bir regüler yüzey olduğunu gösteriniz. (15 puan) 3. V, R 3 ün açık
Diferenisyel Geometri 2 Yazokulu 2010 AdıSoyadı: No : 1. ϕ (u, v) = ( u + 2v, v + 2u, u 2 v ) parametrizasyonu ile verilen M kümesinin bir regüler yüzey olduğunu gösteriniz. (15 puan) 3. V, R 3 ün açık
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
DENEY 2. Statik Sürtünme Katsayısının Belirlenmesi. Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi
 DENEY 2 Statik Sürtünme Katsayısının Belirlenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta-2018 Amaç 1. Kuru yüzeler arasındaki sürtünme kuvveti ve sürtünme katsayısı kavramlarının
DENEY 2 Statik Sürtünme Katsayısının Belirlenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta-2018 Amaç 1. Kuru yüzeler arasındaki sürtünme kuvveti ve sürtünme katsayısı kavramlarının
Normallik Varsayımı ve Ençok Olabilirlik Yöntemi
 Normallik Varsayımı ve Ençok Olabilirlik Yöntemi EO Açıklayıcı Örnekler Ekonometri 1 Konu 14 Sürüm 2,0 (Ekim 2011) UADMK Açık Lisans Bilgisi İşbu belge, Creative Commons Attribution-Non-Commercial ShareAlike
Normallik Varsayımı ve Ençok Olabilirlik Yöntemi EO Açıklayıcı Örnekler Ekonometri 1 Konu 14 Sürüm 2,0 (Ekim 2011) UADMK Açık Lisans Bilgisi İşbu belge, Creative Commons Attribution-Non-Commercial ShareAlike
Gökhan Göl 2. MULTİKOPTER SİSTEMLERİ VE UÇMA PRENSİPLERİ
 1. GİRİŞ İnsansız hava aracı (İHA) hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen yerden kumanda edilen ya da otonom yani belli bir uçuş planı üzerinden otomatik hareket eden, uçuş için içerisinde
1. GİRİŞ İnsansız hava aracı (İHA) hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen yerden kumanda edilen ya da otonom yani belli bir uçuş planı üzerinden otomatik hareket eden, uçuş için içerisinde
Eşanlı Denklem Modelleri
 Eşanlı Denklem Modelleri Eşanlı Denklem Yöntemleri Ekonometri 2 Konu 23 Sürüm 2,0 (Ekim 2011) UADMK Açık Lisans Bilgisi İşbu belge, Creative Commons Attribution-Non-Commercial ShareAlike 3.0 Unported (CC
Eşanlı Denklem Modelleri Eşanlı Denklem Yöntemleri Ekonometri 2 Konu 23 Sürüm 2,0 (Ekim 2011) UADMK Açık Lisans Bilgisi İşbu belge, Creative Commons Attribution-Non-Commercial ShareAlike 3.0 Unported (CC
GEMİLERDE KULLANILAN KLASİK VE MODERN OTOPİLOT SİSTEMLERİNİN TARİHSEL GELİŞİMİ
 Gemi Mühendisliği ve Sanayimiz Sempozyumu, 24-25 Aralık 2004 GEMİLERDE KULLANILAN KLASİK VE MODERN OTOPİLOT SİSTEMLERİNİN TARİHSEL GELİŞİMİ Ar. Gör. Fuat ALARÇİN 1 ÖZET Son yıllarda klasik ve modern otomatik
Gemi Mühendisliği ve Sanayimiz Sempozyumu, 24-25 Aralık 2004 GEMİLERDE KULLANILAN KLASİK VE MODERN OTOPİLOT SİSTEMLERİNİN TARİHSEL GELİŞİMİ Ar. Gör. Fuat ALARÇİN 1 ÖZET Son yıllarda klasik ve modern otomatik
Pamukkale Üniversitesi Mühendislik Bilimleri Dergisi Pamukkale University Journal of Engineering Sciences
 Pamukkale Univ Muh Bilim Derg, 3(), 13, 17 Pamukkale Üniversitesi Mühendislik Bilimleri Dergisi Pamukkale University Journal of Engineering Sciences Sabit mıknatıslı senkron generatörlü değişken hızlı
Pamukkale Univ Muh Bilim Derg, 3(), 13, 17 Pamukkale Üniversitesi Mühendislik Bilimleri Dergisi Pamukkale University Journal of Engineering Sciences Sabit mıknatıslı senkron generatörlü değişken hızlı
WEEK 4 BLM323 NUMERIC ANALYSIS. Okt. Yasin ORTAKCI.
 WEEK 4 BLM33 NUMERIC ANALYSIS Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
WEEK 4 BLM33 NUMERIC ANALYSIS Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Çukurova Üniversitesi Biyomedikal Mühendisliği
 Çukurova Üniversitesi Biyomedikal Mühendisliği BMM212 Elektronik-1 Laboratuvarı Deney Föyü Deney#8 Alan Etkili Transistör (FET) Karakteristikleri Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA,
Çukurova Üniversitesi Biyomedikal Mühendisliği BMM212 Elektronik-1 Laboratuvarı Deney Föyü Deney#8 Alan Etkili Transistör (FET) Karakteristikleri Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA,
Soru 1: Şekil-1 de görülen düzlem gerilme hali için: b) elemanın saat yönünde 30 0 döndürülmesi ile elde edilen yeni durum için elemana tesir
 elemanın saat yönünde 30 0 döndürülmesi ile elde edilen yeni durum için elemana tesir") Soru 1: Şekil-1 de görülen düzlem gerilme hali için: a) elemanın saat yönünde 30 0 döndürülmesi ile elde edilen yeni durum için elemana tesir eden gerilme bileşenlerini, gerilme dönüşüm denklemlerini kullanarak
Soru 1: Şekil-1 de görülen düzlem gerilme hali için: a) elemanın saat yönünde 30 0 döndürülmesi ile elde edilen yeni durum için elemana tesir eden gerilme bileşenlerini, gerilme dönüşüm denklemlerini kullanarak
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
İstatistik ve Olasılık
 İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
Otonom Bir Traktörün Yörünge Kontrolü
 Fırat Üni. Müh. Bil. Dergisi Science and Eng. J of Fırat Uni. 8 () 4-45 6 8 () 4-45 6 Otonom Bir Traktörün Yörünge Kontrolü Özet İkbal ESKİ Erciyes Üniersitesi Mühendislik Fakültesi Mekatronik Mühendisliği
Fırat Üni. Müh. Bil. Dergisi Science and Eng. J of Fırat Uni. 8 () 4-45 6 8 () 4-45 6 Otonom Bir Traktörün Yörünge Kontrolü Özet İkbal ESKİ Erciyes Üniersitesi Mühendislik Fakültesi Mekatronik Mühendisliği
idecad Çelik 8 TS EN Rüzgar Etkileri
 idecad Çelik 8 TS EN 1991-1-4 Rüzgar Etkileri Hazırlayan: Oğuzcan HADİM www.idecad.com.tr TS EN 1991-1-4 Rüzgar Etkileri ve idecad 8 webinar sunumu Konu başlıkları I. TS EN 1991-1-4 Rüzgar Etkileri Yönetmeliğine
idecad Çelik 8 TS EN 1991-1-4 Rüzgar Etkileri Hazırlayan: Oğuzcan HADİM www.idecad.com.tr TS EN 1991-1-4 Rüzgar Etkileri ve idecad 8 webinar sunumu Konu başlıkları I. TS EN 1991-1-4 Rüzgar Etkileri Yönetmeliğine
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ
 BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
İki Serbestlik Dereceli Dört Rotor Sisteminin Tasarımı, Modellenmesi ve Kontrolü
 07 Published in 5th International Symposium on Innovative Technologies in Engineering and Science 9-0 September 07 (ISITES07 Baku - Azerbaijan) İki Serbestlik Dereceli Dört Rotor Sisteminin Tasarımı, Modellenmesi
07 Published in 5th International Symposium on Innovative Technologies in Engineering and Science 9-0 September 07 (ISITES07 Baku - Azerbaijan) İki Serbestlik Dereceli Dört Rotor Sisteminin Tasarımı, Modellenmesi
Mukavemet-I. Yrd.Doç.Dr. Akın Ataş
 Mukavemet-I Yrd.Doç.Dr. Akın Ataş Bölüm 5 Eğilmede Kirişlerin Analizi ve Tasarımı Kaynak: Cisimlerin Mukavemeti, F.P. Beer, E.R. Johnston, J.T. DeWolf, D.F. Mazurek, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mukavemet-I Yrd.Doç.Dr. Akın Ataş Bölüm 5 Eğilmede Kirişlerin Analizi ve Tasarımı Kaynak: Cisimlerin Mukavemeti, F.P. Beer, E.R. Johnston, J.T. DeWolf, D.F. Mazurek, Çevirenler: A. Soyuçok, Ö. Soyuçok.
ALTERNATİF AKIMIN TEMEL ESASLARI
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
İki Boyutlu Eliptik Tipi Diferansiyel Sınır Değer Problemleri İçin MathCAD Kullanılımı
 İki Boyutlu Eliptik Tipi Diferansiyel Sınır Değer Problemleri İçin MathCAD Kullanılımı Vahid Ferecov Rafet Akdeniz Namık Kemal Üniversitesi, Çorlu Mühendislik Fakültesi Elektronik ve Haberleşme Mühendisliği
İki Boyutlu Eliptik Tipi Diferansiyel Sınır Değer Problemleri İçin MathCAD Kullanılımı Vahid Ferecov Rafet Akdeniz Namık Kemal Üniversitesi, Çorlu Mühendislik Fakültesi Elektronik ve Haberleşme Mühendisliği
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
A UNIFIED APPROACH IN GPS ACCURACY DETERMINATION STUDIES
 A UNIFIED APPROACH IN GPS ACCURACY DETERMINATION STUDIES by Didem Öztürk B.S., Geodesy and Photogrammetry Department Yildiz Technical University, 2005 Submitted to the Kandilli Observatory and Earthquake
A UNIFIED APPROACH IN GPS ACCURACY DETERMINATION STUDIES by Didem Öztürk B.S., Geodesy and Photogrammetry Department Yildiz Technical University, 2005 Submitted to the Kandilli Observatory and Earthquake
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin