PID SÜREKLİ KONTROL ORGANI:
|
|
|
- Ilkin Cavus
- 6 yıl önce
- İzleme sayısı:
Transkript
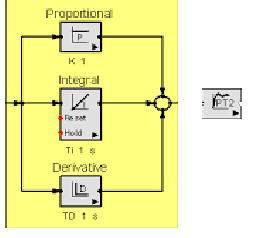
1 PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra, kontrol parametreleri yardımıyla son kontrol elemanına komut göndererek sürekli bir şekilde ayar değişkenini ihtiyaç duyulan miktarı kadar ayarlar. Bu tip kontrol sistemine sürekli kontrol veya PID kontrol Organı denir. Sürekli kontrol organı kontrol parametresi elemanına göre sınıflandırılır. Bunlar 6 çeşittir. a) P- KONTROL, Orantı kontrol (Proportional) b) I- KONTROL, İntegral kontrol (Entegral) c) D KONTROL, Türev Kontrol ( Derivative) d) PI- KONTROL ( Oranti + İntegral ) e) PD KONTROL ( Oranti + Türev ) f) PID KONTROL (Oranti + İntegral+Türev ) I-Kontrol ve D-Kontrol tek başına kullanılmaz. Çünkü hata sinyalinin sıfır olması durumunda ; INTEGRAL (I- Kontrol) ve TÜREV (D-Kontrol) de sıfır olacağından son kontrol elemanına sıfır değerli bir sinyal gönderme durumu söz konusu olacaktır. Bu da her hangi bir kontrol olmaz aksine kontrolsüzlük olur. Bu nedenle tek başlarına kullanılmazlar. P-Kontrol ile birlikte kullanılmaktadırlar. a)p KONTROL( Proportional Control-Orantı Kontrol) P Kontrol (Orantı Kontrol) en basit sürekli kontrol organıdır. Kontrol organının çıkış sinyali olan kontrol eden değişken(o(t)) sürekli bir şekilde hata sinyalinin (E(t)) sabit bir KAZANÇ (K) değeriyle çarpılması sonucunda elde edilen sinyal, son kontrol elemanına gönderilir ve böylece ayar değişkeni arzu edilen miktarda ayarlanır. Kazanç (K) ne kadar büyük ise yani bant ne kadar küçük(dar) ise kazanç o kadar iyidir. Ancak çok dar bantlar oluşturulduğun da kontrol edilen değişken de osilasyon meydana gelir. Çünkü çok dar bantlar P Kontrolünün ideal ON/OFF kontrolüne yakınlaştırır. Bu nedenle kazanç istenildiği kadar büyütülemez yani çok dar bant aralığı seçilemez normal durumlarda P Kontrolün de bir kalıcı hata oluşur(off SET hatası) bunu önlemek için İntegral Kontrolü ile birlikte kullanılması halinde kalıcı hata ortadan kalkar.
2
3
4 P KONTROLÜN ÖZELLİKLERİ 1) Basit bir sistemdir. 2) Uygun bant arlığında oldukça kararlıdır. 3) Bant değeri kolayca ayarlanır. 4) Kalıcı hatası vardır.
5 b) I KONTROL (İNTEGRAL KONTROL) Hata sinyalinin integralini alarak son kontrol elemanına kontrol eden işaretini göndermek suretiyle işlem yapılır. I KONTROL tek başına kullanılmaz. P KONTROL ile birlikte kullanıldığında P-kontrol sisteminde oluşan kalıcı hatayı telafi eder, bu sisteme PI KONTROL sistemi olarak adlandırılır.
6
7 c) D KONTROL (TÜREV KONTROL) Kontrol organın çıkışı(kontrol eden değişken) ; O(t) Hata sinyalinin türevini almak suretiyle elde edilir, bu sinyal son kontrol elemanına iletilerek ayar değişkeni ayarlanır. Türev kontrol tek başına kullanılmaz, çünkü hatanın sıfır olması durumunda türevide sıfır olur. Hatanın sabit olarak değişmesi durumunda türev başta Diac (Delta) fonksiyonu olur sonra türevi sıfır olur. Delta(Diac) fonksiyonu son kontrol elemanına darbe olarak iletilir. Bu durum, çok küçük sabit fonksiyonlarda (gürültülerde) kontrol edilen değişkeninde osilasyon olur. D- KONTROL ileri fazda çalışır, bu nedenle geri fazda çalışan I-Kontrol ile birlikte kullanıldığında I- Kontrol da oluşan geçikme telafi edilmiş olur. Gürültülü sistemlerde Türev kontrol kullanılmaz.
8
9
10
11 PI KONTROLÜN ÖZELLİKLERİ 1) Kalıcı hatası yoktur 2) Geri fazda çalıştığı için yavaş sistemlerde kararsızlık oluşabilir. 3) Çok gürültülü sistemlerde kararlılığı sağlar. 4) Çok yavaş değişen sistemlerde asla kullanılmaz.(sistemi daha da yavaşlatacağından kararsızlık
12
13 PD Kontrolün Özellikleri 1) Kararlılık durumu iyidir. 2) Orantı Kontrol e (P) nazaran çok az bir kalıcı hatası vardır 3) İleri fazda çalıştığında gecikmeli sistemlerde kullanılmaktadır. 4) Gürültülü sistemlerde asla kullanılmaz. Sistemi karasızlığa götürür.
14
15
16
17
18
KONTROL ORGANI VE SİSTEMLERİ:
 KONTROL ORGANI VE SİSTEMLERİ: Open and Closed Loop Control(Açık ve kapalı Çevrim) KONTROL SİSTEMLERİ : 1) Açık çevrim Kontrol sistemleri 2) Kapalı Çevrim Kontrol Sistemleri Kontrol Sistemlerin kullanılması
KONTROL ORGANI VE SİSTEMLERİ: Open and Closed Loop Control(Açık ve kapalı Çevrim) KONTROL SİSTEMLERİ : 1) Açık çevrim Kontrol sistemleri 2) Kapalı Çevrim Kontrol Sistemleri Kontrol Sistemlerin kullanılması
MEB YÖK MESLEK YÜKSEKOKULLARI PROGRAM GELĐŞTĐRME PROJESĐ. 1. Endüstride kullanılan Otomatik Kontrolun temel kavramlarını açıklayabilme.
 PROGRAMIN ADI DERSĐN ADI DERSĐN ĐŞLENECEĞĐ YARIYIL HAFTALIK DERS SAATĐ DERSĐN SÜRESĐ ENDÜSTRĐYEL OTOMASYON SÜREÇ KONTROL 2. Yıl III. Yarıyıl 4 (Teori: 3, Uygulama: 1, Kredi:4) 56 Saat AMAÇLAR 1. Endüstride
PROGRAMIN ADI DERSĐN ADI DERSĐN ĐŞLENECEĞĐ YARIYIL HAFTALIK DERS SAATĐ DERSĐN SÜRESĐ ENDÜSTRĐYEL OTOMASYON SÜREÇ KONTROL 2. Yıl III. Yarıyıl 4 (Teori: 3, Uygulama: 1, Kredi:4) 56 Saat AMAÇLAR 1. Endüstride
BÖLÜM 5 OTOMATİK KONTROL FORMLARI 5.1 AÇIK KAPALI KONTROL (ON-OFF) BİLGİSAYARLI KONTROL
 BİLGİSAYARLI KONTROL") BÖLÜM 5 OTOMATİK KONTROL FORMLARI Otomatik kontrolda, kontrol edici cihazın, set değeri etrafında gereken hassasiyetle çalışırken, hatayı gereken oranda minimuma indirecek çeşitli kontrol formları vardır.
BÖLÜM 5 OTOMATİK KONTROL FORMLARI Otomatik kontrolda, kontrol edici cihazın, set değeri etrafında gereken hassasiyetle çalışırken, hatayı gereken oranda minimuma indirecek çeşitli kontrol formları vardır.
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU. Deney No: 3 PID KONTROLÜ
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ
 MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
AMASYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü
 AMASYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü Denetim Sistemleri Laboratuvarı Deney Föyü Öğr.Gör.Cenk GEZEGİN Arş.Gör.Birsen BOYLU AYVAZ DENEY 3-RAPOR PİD DENETİM Öğrencinin
AMASYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü Denetim Sistemleri Laboratuvarı Deney Föyü Öğr.Gör.Cenk GEZEGİN Arş.Gör.Birsen BOYLU AYVAZ DENEY 3-RAPOR PİD DENETİM Öğrencinin
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Robot Bilimi. Robot Kontrol Sistemleri
 Robot Bilimi Robot Kontrol Sistemleri Öğr. Gör. M. Ozan AKI r1.0 Robot Kontrol Yapısı Robotlar (Aynı zamanda insanlarda); Çevrelerini Algılarlar Karar verirler (Amaçları, Görevleri v.s.) Çevrelerine Tepki
Robot Bilimi Robot Kontrol Sistemleri Öğr. Gör. M. Ozan AKI r1.0 Robot Kontrol Yapısı Robotlar (Aynı zamanda insanlarda); Çevrelerini Algılarlar Karar verirler (Amaçları, Görevleri v.s.) Çevrelerine Tepki
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI
 EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
OTOMATİK KONTROL FORMLARI
 OTOMATİK KONTROL FORMLARI Otomatik kontrol döngüsünde kontrol edici blok yerine yerleştirilecek herhangi bir kontrol cihazı set değeri etrafında çalışması gereken hassasiyette sistemi kontrol etmelidir.
OTOMATİK KONTROL FORMLARI Otomatik kontrol döngüsünde kontrol edici blok yerine yerleştirilecek herhangi bir kontrol cihazı set değeri etrafında çalışması gereken hassasiyette sistemi kontrol etmelidir.
GEFRAN PID KONTROL CİHAZLARI
 GEFRAN PID KONTROL CİHAZLARI GENEL KONTROL YÖNTEMLERİ: ON - OFF (AÇIK-KAPALI) KONTROL SİSTEMLERİ: Bu eknik en basi konrol ekniğidir. Ölçülen değer (), se değerinin () üzerinde olduğunda çıkış sinyali açılır,
GEFRAN PID KONTROL CİHAZLARI GENEL KONTROL YÖNTEMLERİ: ON - OFF (AÇIK-KAPALI) KONTROL SİSTEMLERİ: Bu eknik en basi konrol ekniğidir. Ölçülen değer (), se değerinin () üzerinde olduğunda çıkış sinyali açılır,
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
ANALOG FİLTRELEME DENEYİ
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG FİLTRELEME DENEYİ Ölçme ve telekomünikasyon tekniğinde sık sık belirli frekans bağımlılıkları olan devreler gereklidir. Genellikle belirli bir frekans bandının
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG FİLTRELEME DENEYİ Ölçme ve telekomünikasyon tekniğinde sık sık belirli frekans bağımlılıkları olan devreler gereklidir. Genellikle belirli bir frekans bandının
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2
 KONTROL ELEMANLARININ İNCELENMESİ 2") ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
RASGELE SÜREÇLER İ.Ü. ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ İLETİŞİM LABORATUVARI ARALIK, 2007
 RASGELE SÜREÇLER İ.Ü. ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ İLETİŞİM LABORATUVARI ARALIK, 007 1 Tekdüze Dağılım Bir X rasgele değişkenin, a ve b arasında tekdüze dağılımlı olabilmesi için olasılık yoğunluk
RASGELE SÜREÇLER İ.Ü. ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ İLETİŞİM LABORATUVARI ARALIK, 007 1 Tekdüze Dağılım Bir X rasgele değişkenin, a ve b arasında tekdüze dağılımlı olabilmesi için olasılık yoğunluk
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
PROSES KONTROL DENEY FÖYÜ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
İÇİNDEKİLER 1. GİRİŞ.3 2. OTOMATİK KONTROL 3 3. TESİSLERDE PROSES KONTROLÜNÜN GEREKLİLİĞİ.3 4. KONTROL SİSTEMLERİNİN TÜRLERİ
 PROSES KONTROLÜ İÇİNDEKİLER 1. GİRİŞ...3 2. OTOMATİK KONTROL 3 3. TESİSLERDE PROSES KONTROLÜNÜN GEREKLİLİĞİ...3 4. KONTROL SİSTEMLERİNİN TÜRLERİ....4 4.1. AÇIK ÇEVRİM KONTROL SİSTEMLERİ..... 4 4.2. KAPALI
PROSES KONTROLÜ İÇİNDEKİLER 1. GİRİŞ...3 2. OTOMATİK KONTROL 3 3. TESİSLERDE PROSES KONTROLÜNÜN GEREKLİLİĞİ...3 4. KONTROL SİSTEMLERİNİN TÜRLERİ....4 4.1. AÇIK ÇEVRİM KONTROL SİSTEMLERİ..... 4 4.2. KAPALI
Otomatik Kontrol. Kontrol Sistemlerin Temel Özellikleri
 Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
NJ Kontrolcüler için PIDAT Uygulaması. PIDAT Fonksiyon Bloğu PIDAT Fonk. Bloğu Değişkenleri SSR Çıkışı
 NJ Kontrolcüler için PIDAT Uygulaması PIDAT Fonksiyon Bloğu PIDAT Fonk. Bloğu Değişkenleri SSR Çıkışı PIDAT Fonksiyon Bloğu PID kontrol aşağıdaki blok şemada gösterildiği gibi ortam değerini ulaşılmak
NJ Kontrolcüler için PIDAT Uygulaması PIDAT Fonksiyon Bloğu PIDAT Fonk. Bloğu Değişkenleri SSR Çıkışı PIDAT Fonksiyon Bloğu PID kontrol aşağıdaki blok şemada gösterildiği gibi ortam değerini ulaşılmak
Deney 3: Opamp. Opamp ın (işlemsel yükselteç) çalışma mantığının ve kullanım alanlarının öğrenilmesi, uygulamalarla pratik bilginin pekiştirilmesi.
 çalışma mantığının ve kullanım alanlarının öğrenilmesi, uygulamalarla pratik bilginin pekiştirilmesi.") Deneyin Amacı: Deney 3: Opamp Opamp ın (işlemsel yükselteç) çalışma mantığının ve kullanım alanlarının öğrenilmesi, uygulamalarla pratik bilginin pekiştirilmesi. A.ÖNBİLGİ İdeal bir opamp (operational-amplifier)
Deneyin Amacı: Deney 3: Opamp Opamp ın (işlemsel yükselteç) çalışma mantığının ve kullanım alanlarının öğrenilmesi, uygulamalarla pratik bilginin pekiştirilmesi. A.ÖNBİLGİ İdeal bir opamp (operational-amplifier)
SÜREKLİ OLASILIK DAĞILIŞLARI
 SÜREKLİ OLASILIK DAĞILIŞLARI Sürekli verilerin göstermiş olduğu dağılışa sürekli olasılık dağılışı denir. Sürekli olasılık dağılışlarının fonksiyonlarına yoğunluk fonksiyonu denilmekte ve bu dağılışlarla
SÜREKLİ OLASILIK DAĞILIŞLARI Sürekli verilerin göstermiş olduğu dağılışa sürekli olasılık dağılışı denir. Sürekli olasılık dağılışlarının fonksiyonlarına yoğunluk fonksiyonu denilmekte ve bu dağılışlarla
SERVOMOTOR HIZ VE POZİSYON KONTROLÜ
 SERVOMOTOR HIZ VE POZİSYON KONTROLÜ Deneye Hazırlık: Deneye gelmeden önce DC servo motor çalışması ve kontrolü ile ilgili bilgi toplayınız. 1.1.Giriş 1. KAPALI ÇEVRİM HIZ KONTROLÜ DC motorlar çok fazla
SERVOMOTOR HIZ VE POZİSYON KONTROLÜ Deneye Hazırlık: Deneye gelmeden önce DC servo motor çalışması ve kontrolü ile ilgili bilgi toplayınız. 1.1.Giriş 1. KAPALI ÇEVRİM HIZ KONTROLÜ DC motorlar çok fazla
Op-Amp Uygulama Devreleri
 Op-Amp Uygulama Devreleri Tipik Op-amp devre yapıları şunları içerir: Birim Kazanç Arabelleği (Gerilim İzleyici) Evirici Yükselteç Evirmeyen Yükselteç Toplayan Yükselteç İntegral Alıcı Türev Alıcı Karşılaştırıcı
Op-Amp Uygulama Devreleri Tipik Op-amp devre yapıları şunları içerir: Birim Kazanç Arabelleği (Gerilim İzleyici) Evirici Yükselteç Evirmeyen Yükselteç Toplayan Yükselteç İntegral Alıcı Türev Alıcı Karşılaştırıcı
Kontrol Sistemlerinin Analizi
 Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Algılayıcılar (Sensors)
") Algılayıcılar (Sensors) Sayısal işlem ve ölçmeler sadece elektriksel büyüklüklerle yapılmaktadır. Genelde teknik ve fiziksel büyüklükler (sıcaklık, ağırlık kuvveti ve basınç gibi) elektrik dalından olmayan
Algılayıcılar (Sensors) Sayısal işlem ve ölçmeler sadece elektriksel büyüklüklerle yapılmaktadır. Genelde teknik ve fiziksel büyüklükler (sıcaklık, ağırlık kuvveti ve basınç gibi) elektrik dalından olmayan
Feedback sinyal (Geribeslem sinyali): Hitachi inverterlerine analog giriş gerilim(10v max.) ve akım(20ma max) olarak verilir..
: Hitachi inverterlerine analog giriş gerilim(10v max.) ve akım(20ma max) olarak verilir..") PID KONTROL 1 GENEL BAKIŞ Hitachi inverterler standart olarak PID kontrol özelliğine sahiptir. Hava veya sıvı akışkan kontrollü için fan ve pompa uygulamalarında akışkan değerini sabit tutmak PID kontrol
PID KONTROL 1 GENEL BAKIŞ Hitachi inverterler standart olarak PID kontrol özelliğine sahiptir. Hava veya sıvı akışkan kontrollü için fan ve pompa uygulamalarında akışkan değerini sabit tutmak PID kontrol
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
Otomatik kontrol, özellikle mühendislik sistemlerinde giderek daha çok önem kazanmaktadır. Bunun nedenleri şöyle sıralanabilir :
 GİRİŞ Kontrol işlemlerine günlük hayatın hemen her anında rastlanır. Bilinçli ya da bilinçsiz olarak kontrol işlemleri uygular, kontrol işlemleri içinde davranırız. Kontrol işlemlerinin birçoğu otomatik
GİRİŞ Kontrol işlemlerine günlük hayatın hemen her anında rastlanır. Bilinçli ya da bilinçsiz olarak kontrol işlemleri uygular, kontrol işlemleri içinde davranırız. Kontrol işlemlerinin birçoğu otomatik
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1. BASINÇ, AKIŞ ve SEVİYE KONTROL DENEYLERİ
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 BASINÇ, AKIŞ ve SEVİYE KONTROL DENEYLERİ DENEY SORUMLUSU Arş.Gör. Şaban ULUS Haziran 2012 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 BASINÇ, AKIŞ ve SEVİYE KONTROL DENEYLERİ DENEY SORUMLUSU Arş.Gör. Şaban ULUS Haziran 2012 KAYSERİ
Şekil 1. Geri beslemeli yükselteçlerin genel yapısı
 DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
KONTROL SİSTEMLERİNE GİRİŞ. Hazırlayan Dr.Birol Arifoğlu
 KONTROL SİSTEMLERİNE GİRİŞ Hazırlayan Dr.Birol Arifoğlu Temel Kavramlar ve Tanımlar Açık Çevrim Kontrol Sistemleri Kapalı Çevrim (Geri Beslemeli) Kontrol Sistemleri İleri Beslemeli Kontrol Sistemleri Otomatik
KONTROL SİSTEMLERİNE GİRİŞ Hazırlayan Dr.Birol Arifoğlu Temel Kavramlar ve Tanımlar Açık Çevrim Kontrol Sistemleri Kapalı Çevrim (Geri Beslemeli) Kontrol Sistemleri İleri Beslemeli Kontrol Sistemleri Otomatik
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
KABLOSUZ İLETİŞİM
 KABLOSUZ İLETİŞİM 805540 MODÜLASYON TEKNİKLERİ FREKANS MODÜLASYONU İçerik 3 Açı modülasyonu Frekans Modülasyonu Faz Modülasyonu Frekans Modülasyonu Açı Modülasyonu 4 Açı modülasyonu Frekans Modülasyonu
KABLOSUZ İLETİŞİM 805540 MODÜLASYON TEKNİKLERİ FREKANS MODÜLASYONU İçerik 3 Açı modülasyonu Frekans Modülasyonu Faz Modülasyonu Frekans Modülasyonu Açı Modülasyonu 4 Açı modülasyonu Frekans Modülasyonu
DERSİN ADI DENEY ADI DENEYİN SORUMLUSU DENEYİN YAPILDIĞI LABORATUAR
 ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERSİN ADI MAK 4119- MAKİNE TASARIM LABORATUARI DENEY ADI BİR SÜREÇ DENETİM SİSTEMİNİN İNCELENMESİ DENEYİN SORUMLUSU ÖĞR. GÖR.
ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERSİN ADI MAK 4119- MAKİNE TASARIM LABORATUARI DENEY ADI BİR SÜREÇ DENETİM SİSTEMİNİN İNCELENMESİ DENEYİN SORUMLUSU ÖĞR. GÖR.
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 6
 FIRT ÜNİERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ EMÜ-419 OTOMTİK KONTROL LORTURI DENEY 6 NLOG PID KONTROLÖRÜN HIZ KONTROL SİSTEMLERİNDE UYGULNMSI E KRKTERİSTİKLERİ 1. macı:
FIRT ÜNİERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ EMÜ-419 OTOMTİK KONTROL LORTURI DENEY 6 NLOG PID KONTROLÖRÜN HIZ KONTROL SİSTEMLERİNDE UYGULNMSI E KRKTERİSTİKLERİ 1. macı:
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4B: DC MOTOR TRANSFER FONKSİYONU VE PARAMETRELERİNİN ELDE EDİLMESİ
 Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
BÖLÜM 9 Kök-yer Eğrisiyle Tasarım
 BÖLÜM 9 Kök-yer Eğrisiyle Tasarım GİRİŞ Kök-yer eğrisi bize grafik olarak sistemin geçici hal cevabı ve kararlılığı ile ilgili bilgi verir. Sistemin geçici hal cevabı ve kararlılığı ile ilgili bilgi almak
BÖLÜM 9 Kök-yer Eğrisiyle Tasarım GİRİŞ Kök-yer eğrisi bize grafik olarak sistemin geçici hal cevabı ve kararlılığı ile ilgili bilgi verir. Sistemin geçici hal cevabı ve kararlılığı ile ilgili bilgi almak
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
Genetik Algoritmalar. Bölüm 1. Optimizasyon. Yrd. Doç. Dr. Adem Tuncer E-posta:
 Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
RF MİKROELEKTRONİK GÜRÜLTÜ
 RF MİKROELEKTRONİK GÜRÜLTÜ RASTGELE BİR SİNYAL Gürültü rastgele bir sinyal olduğu için herhangi bir zamandaki değerini tahmin etmek imkansızdır. Bu sebeple tekrarlayan sinyallerde de kullandığımız ortalama
RF MİKROELEKTRONİK GÜRÜLTÜ RASTGELE BİR SİNYAL Gürültü rastgele bir sinyal olduğu için herhangi bir zamandaki değerini tahmin etmek imkansızdır. Bu sebeple tekrarlayan sinyallerde de kullandığımız ortalama
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
Kontrol Sistemleri Tasarımı. Açık ve Kapalı Çevrim Kontrol
 Kontrol Sistemleri Tasarımı Açık ve Kapalı Çevrim Kontrol Prof. Dr. Bülent E. Platin Kontrol Eilecek Sistem D Sistem U C C : kontrol eilecek çıktı U : kontrol girisi D : bozc etken C = U D Prof. Dr. Bülent
Kontrol Sistemleri Tasarımı Açık ve Kapalı Çevrim Kontrol Prof. Dr. Bülent E. Platin Kontrol Eilecek Sistem D Sistem U C C : kontrol eilecek çıktı U : kontrol girisi D : bozc etken C = U D Prof. Dr. Bülent
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Bölüm 4 Ardışıl Lojik Devre Deneyleri
 Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
Şekil 1.1 Genliği kuvantalanmamış sürekli zamanlı işaret. İşaretin genliği sürekli değerler alır. Buna analog işaret de denir.
 İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
AREL ÜNİVERSİTESİ DEVRE ANALİZİ
 AREL ÜNİVERSİTESİ DEVRE ANALİZİ İŞLEMSEL KUVVETLENDİRİCİLER DR. GÖRKEM SERBES İŞLEMSEL KUVVETLENDİRİCİ İşlemsel kuvvetlendirici (Op-Amp); farksal girişi ve tek uçlu çıkışı olan DC kuplajlı, yüksek kazançlı
AREL ÜNİVERSİTESİ DEVRE ANALİZİ İŞLEMSEL KUVVETLENDİRİCİLER DR. GÖRKEM SERBES İŞLEMSEL KUVVETLENDİRİCİ İşlemsel kuvvetlendirici (Op-Amp); farksal girişi ve tek uçlu çıkışı olan DC kuplajlı, yüksek kazançlı
ERCİYES ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ SİVİL HAVACILIK ANABİLİM DALI YENİ DERS ÖNERİSİ/ DERS GÜNCELLEME
 / DERS GÜNCELLEME Dersin Kodu SHA 615 Dersin Adı İSTATİSTİKSEL SİNYAL İŞLEME Yarıyılı GÜZ Dersin İçeriği: Olasılık ve olasılıksal süreçlerin gözden geçirilmesi. Bayes kestirim kuramı. Büyük olabilirlik
/ DERS GÜNCELLEME Dersin Kodu SHA 615 Dersin Adı İSTATİSTİKSEL SİNYAL İŞLEME Yarıyılı GÜZ Dersin İçeriği: Olasılık ve olasılıksal süreçlerin gözden geçirilmesi. Bayes kestirim kuramı. Büyük olabilirlik
OTOMASYON SİSTEMLERİ. Hazırlayan Yrd.Doç.Dr.Birol Arifoğlu
 OTOMASYON SİSTEMLERİ Hazırlayan Yrd.Doç.Dr.Birol Arifoğlu Temel Kavramlar ve Tanımlar Açık Çevrim Kontrol Sistemleri Kapalı Çevrim (Geri Beslemeli) Kontrol Sistemleri İleri Beslemeli Kontrol Sistemleri
OTOMASYON SİSTEMLERİ Hazırlayan Yrd.Doç.Dr.Birol Arifoğlu Temel Kavramlar ve Tanımlar Açık Çevrim Kontrol Sistemleri Kapalı Çevrim (Geri Beslemeli) Kontrol Sistemleri İleri Beslemeli Kontrol Sistemleri
DENEY: 1.1 EVİREN YÜKSELTECİN DC DA ÇALIŞMASININ İNCELENMESİ
 DENEY: 1.1 EVİREN YÜKSELTECİN DC DA ÇALIŞMASININ İNCELENMESİ HAZIRLIK BİLGİLERİ: Şekil 1.1 de işlemsel yükseltecin eviren yükselteç olarak çalışması görülmektedir. İşlemsel yükselteçler iyi bir DC yükseltecidir.
DENEY: 1.1 EVİREN YÜKSELTECİN DC DA ÇALIŞMASININ İNCELENMESİ HAZIRLIK BİLGİLERİ: Şekil 1.1 de işlemsel yükseltecin eviren yükselteç olarak çalışması görülmektedir. İşlemsel yükselteçler iyi bir DC yükseltecidir.
SAYISAL KONTROL 2 PROJESİ
 SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
MIT OpenCourseWare Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009
 MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
Ontrol E110 KONTROL PANELİ MÜHENDİSLİK KILAVUZU KP0048
 Ontrol E0 KONTROL PANELİ MÜHENDİSLİK KILAVUZU KP0048 GİRİŞ E0 Kontrol Paneli, bir dizi parametre ayarına dayanan basit konfigürasyon olanağıyla, çok geniş bir yelpazede kapsamlı otomatik kontrol çözümleri
Ontrol E0 KONTROL PANELİ MÜHENDİSLİK KILAVUZU KP0048 GİRİŞ E0 Kontrol Paneli, bir dizi parametre ayarına dayanan basit konfigürasyon olanağıyla, çok geniş bir yelpazede kapsamlı otomatik kontrol çözümleri
PROSES KONTROL. Şekil B de yük değişkeni (8) nolu okla, yük elemanı ise (7) nolu blok ile gösterilmiştir.
 nolu okla, yük elemanı ise (7) nolu blok ile gösterilmiştir.") PROSES KONTROL Prosesler, normal şartlarda çalışırken bütün değişkenleri zamana göre değişmeyerek belli sabit değerlerdedir ve sistem yatışkın haldedir. Ancak işletim esnasında bir takım etkiler çıkış
PROSES KONTROL Prosesler, normal şartlarda çalışırken bütün değişkenleri zamana göre değişmeyerek belli sabit değerlerdedir ve sistem yatışkın haldedir. Ancak işletim esnasında bir takım etkiler çıkış
Elektronik Terazi KULLANMA KĐTABI ACS Z SERĐSĐ ĐÇĐNDEKĐLER. 3 Kg - 6 Kg 15 Kg - 30 Kg
 ĐÇĐNDEKĐLER Elektronik Terazi KULLANMA KĐTABI ACS Z SERĐSĐ Özellikler Tuş Takımı Çalıştırma - Cihazı açma kapama - Alarm ayarları - Tartım Fonksiyonu - Sayıcı Fonksiyonu - Yüzdeleme Fonksiyonu Hata Mesajları
ĐÇĐNDEKĐLER Elektronik Terazi KULLANMA KĐTABI ACS Z SERĐSĐ Özellikler Tuş Takımı Çalıştırma - Cihazı açma kapama - Alarm ayarları - Tartım Fonksiyonu - Sayıcı Fonksiyonu - Yüzdeleme Fonksiyonu Hata Mesajları
TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI
 Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Sıtkı KOCAOĞLU 1, Hilmi KUŞÇU 2. Kırklareli Üniversitesi, Kırklareli sitki.kocaoglu@kirklareli.edu.tr. Trakya Üniversitesi, Edirne hilmi@trakya.edu.
 PIC İLE DC MOTORLARIN HIZ VE KONUM KONTROLÜ İÇİN GEREKLİ PID PARAMETRELERİNİN BELİRLENMESİ VE BİR UYGULAMA Sıtkı KOCAOĞLU 1, Hilmi KUŞÇU 2 1 Elektronik Teknolojisi Bölümü Kırklareli Üniversitesi, Kırklareli
PIC İLE DC MOTORLARIN HIZ VE KONUM KONTROLÜ İÇİN GEREKLİ PID PARAMETRELERİNİN BELİRLENMESİ VE BİR UYGULAMA Sıtkı KOCAOĞLU 1, Hilmi KUŞÇU 2 1 Elektronik Teknolojisi Bölümü Kırklareli Üniversitesi, Kırklareli
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-I
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-I DENEY -8- PID KONTROL İLE DC MOTOR KONTROLÜ HAZIRLIK SORULARI: Arama motoruna PID
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-I DENEY -8- PID KONTROL İLE DC MOTOR KONTROLÜ HAZIRLIK SORULARI: Arama motoruna PID
Şekil 7.1 Bir tankta sıvı birikimi
 6 7. DİFERENSİYEL DENKLEMLERİN SAYISAL ÇÖZÜMLERİ Diferensiyel denklemlerin sayısal integrasyonunda kullanılabilecek bir çok yöntem vardır. Tecrübeler dördüncü mertebe (Runge-Kutta) yönteminin hemen hemen
6 7. DİFERENSİYEL DENKLEMLERİN SAYISAL ÇÖZÜMLERİ Diferensiyel denklemlerin sayısal integrasyonunda kullanılabilecek bir çok yöntem vardır. Tecrübeler dördüncü mertebe (Runge-Kutta) yönteminin hemen hemen
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
KONTROL ORGANI VE S STEMLER :
 KONTROL ORGANI VE S STEMLER : Open and Closed Loop Control(Aç k ve kapal Çevrim) KONTROL STEMLER : 1) Aç k çevrim Kontrol sistemleri 2) Kapal Çevrim Kontrol Sistemleri Kontrol Sistemlerin kullan lmas ve
KONTROL ORGANI VE S STEMLER : Open and Closed Loop Control(Aç k ve kapal Çevrim) KONTROL STEMLER : 1) Aç k çevrim Kontrol sistemleri 2) Kapal Çevrim Kontrol Sistemleri Kontrol Sistemlerin kullan lmas ve
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
kirciemre.wordpress.com İçindekiler
 İçindekiler ÖZET... 1 1.TEORİ... 3 1.1.Oransal Kontrol (P Kontrol)... 4 1.2.Oransal İntegral Kontrol (PI Kontrol)... 6 1.3.Oransal İntegral Türevsel Kontrol (PID Kontrol)... 7 2.DENEYSEL... 8 2.1.Deneyin
İçindekiler ÖZET... 1 1.TEORİ... 3 1.1.Oransal Kontrol (P Kontrol)... 4 1.2.Oransal İntegral Kontrol (PI Kontrol)... 6 1.3.Oransal İntegral Türevsel Kontrol (PID Kontrol)... 7 2.DENEYSEL... 8 2.1.Deneyin
KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU
 KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU B. HACIBEKİROĞLU, Y. GÖKÇE, S. ERTUNÇ, B. AKAY Ankara Üniversitesi, Mühendislik
KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU B. HACIBEKİROĞLU, Y. GÖKÇE, S. ERTUNÇ, B. AKAY Ankara Üniversitesi, Mühendislik
ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER. -Örnek Giriş Şeması- SON = 01 (SERVO ON)
") ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER -Örnek Giriş Şeması- SON = 01 (SERVO ON) Servo sürücünün dijital girişlerinden (P2-10 P2-15) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER -Örnek Giriş Şeması- SON = 01 (SERVO ON) Servo sürücünün dijital girişlerinden (P2-10 P2-15) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
YAPAY SİNİR AĞLARI. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
TEMEL OTOMATİK KONTROL NOTLARI. ORASS OTOMASYON TEKNOLOJİK SİSTEMLER SAN.ve TİC.LTD.ŞTİ.
 TEMEL OTOMATİK KONTROL NOTLARI İÇİNDEKİLER Sayfa GİRİŞ 3 OTOMATİK KONTROL TÜRLERİ 4 İKİ KONUMLU KONTROL 4 YÜZER KONTROL 5 ORANSAL KONROL 7 ORANSAL + İNTEGRAL KONTROL 9 ORANSAL + TÜREVSEL KONTROL 10 ORANSAL
TEMEL OTOMATİK KONTROL NOTLARI İÇİNDEKİLER Sayfa GİRİŞ 3 OTOMATİK KONTROL TÜRLERİ 4 İKİ KONUMLU KONTROL 4 YÜZER KONTROL 5 ORANSAL KONROL 7 ORANSAL + İNTEGRAL KONTROL 9 ORANSAL + TÜREVSEL KONTROL 10 ORANSAL
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
Kontrol Sistemlerinin Tasarımı
 Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım IV Geribesleme Üzerinden Denetim ve Fiziksel Gerçekleme Prof.Dr.Galip Cansever 2 3 Denetleyiciyi veya dengeleyiciyi geribesleme hattı üzerine
Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım IV Geribesleme Üzerinden Denetim ve Fiziksel Gerçekleme Prof.Dr.Galip Cansever 2 3 Denetleyiciyi veya dengeleyiciyi geribesleme hattı üzerine
1. LİNEER PCM KODLAMA
 1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
ANALOG HABERLEŞME (GM)
") ANALOG HABERLEŞME (GM) Taşıyıcı sinyalin sinüsoidal olduğu haberleşme sistemidir. Sinüs işareti formül olarak; V. sin(2 F ) ya da i I. sin(2 F ) dır. Formülde; - Zamana bağlı değişen ani gerilim (Volt)
ANALOG HABERLEŞME (GM) Taşıyıcı sinyalin sinüsoidal olduğu haberleşme sistemidir. Sinüs işareti formül olarak; V. sin(2 F ) ya da i I. sin(2 F ) dır. Formülde; - Zamana bağlı değişen ani gerilim (Volt)
DC MOTORUN HIZ PERFORMANS EĞRİSİ KULLANILARAK KAZANÇ PARAMETRELERİNİN (P,I,D) BULUNMASI. Hakan TERZİOĞLU YÜKSEK LİSANS TEZİ ELEKTRİK EĞİTİMİ
 BULUNMASI. Hakan TERZİOĞLU YÜKSEK LİSANS TEZİ ELEKTRİK EĞİTİMİ") i DC MOTORUN HIZ PERFORMANS EĞRİSİ KULLANILARAK KAZANÇ PARAMETRELERİNİN (P,I,D) BULUNMASI Hakan TERZİOĞLU YÜKSEK LİSANS TEZİ ELEKTRİK EĞİTİMİ GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ HAZİRAN 2008 ANKARA
i DC MOTORUN HIZ PERFORMANS EĞRİSİ KULLANILARAK KAZANÇ PARAMETRELERİNİN (P,I,D) BULUNMASI Hakan TERZİOĞLU YÜKSEK LİSANS TEZİ ELEKTRİK EĞİTİMİ GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ HAZİRAN 2008 ANKARA
Bölüm 9. Altprogramlar ISBN
 Bölüm 9 Altprogramlar ISBN 0-321-49362-1 Giriş Bu bölümde, programlarda sıkça kullanılan işlemlerin bir araya gruplanması ile oluşturulan altprogramlar incelenecektir. Altprogramlar sayesinde bir programda
Bölüm 9 Altprogramlar ISBN 0-321-49362-1 Giriş Bu bölümde, programlarda sıkça kullanılan işlemlerin bir araya gruplanması ile oluşturulan altprogramlar incelenecektir. Altprogramlar sayesinde bir programda
ZM-2H606 İki Faz Step. Motor Sürücüsü. Özet
 ZM-2H606 İki Faz Step Motor Sürücüsü Özet ZM-2H606 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
ZM-2H606 İki Faz Step Motor Sürücüsü Özet ZM-2H606 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ
 SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
ideal Sistem Tester Kullanım Klavuzu
 1- Sistem Modülüne Giriş ideal Sistem Tester Kullanım Klavuzu Herhangi bir Grafik penceresinin başlığındaki S harfine basılarak açılan menüden yapılabilen seçimlerle kullanılmaya başlanır. Bu menüden,
1- Sistem Modülüne Giriş ideal Sistem Tester Kullanım Klavuzu Herhangi bir Grafik penceresinin başlığındaki S harfine basılarak açılan menüden yapılabilen seçimlerle kullanılmaya başlanır. Bu menüden,
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU
 FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU KONTEK OTOMASYON A.Ş. BEYİT SOK. NO:27 YUKARI DUDULLU ÜMRANİYE / İSTANBUL 0216 466 47 00 (T) 0216 466 21 20 (F) www.kontekotomasyon.com.tr Sayfa 1 / 7 TUŞ FONKSİYONLARI
FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU KONTEK OTOMASYON A.Ş. BEYİT SOK. NO:27 YUKARI DUDULLU ÜMRANİYE / İSTANBUL 0216 466 47 00 (T) 0216 466 21 20 (F) www.kontekotomasyon.com.tr Sayfa 1 / 7 TUŞ FONKSİYONLARI
BTEP243 Ders 3. class Yazım Kuralı:
 BTEP243 Ders 3 Sınıflar ve Nesneler Nesne tabanlı programlamada, programlamanın temeli sınıflardır (class). Nesnelerin yaratılmasında taslak (blueprint) görevi görür. Sınıflar; o Nesnelerin özelliklerinin
BTEP243 Ders 3 Sınıflar ve Nesneler Nesne tabanlı programlamada, programlamanın temeli sınıflardır (class). Nesnelerin yaratılmasında taslak (blueprint) görevi görür. Sınıflar; o Nesnelerin özelliklerinin
KAĞIT HAMURU HAZIRLAMA SÜRECİ OTOMASYONU. YÜKSEK LİSANS TEZİ Elk. Müh. Kerem ÖLMEZ. Anabilim Dalı : ELEKTRİK MÜHENDİSLİĞİ
 İSTANBUL TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ KAĞIT HAMURU HAZIRLAMA SÜRECİ OTOMASYONU YÜKSEK LİSANS TEZİ Elk. Müh. Kerem ÖLMEZ Anabilim Dalı : ELEKTRİK MÜHENDİSLİĞİ Programı : KONTROL ve OTOMASYON
İSTANBUL TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ KAĞIT HAMURU HAZIRLAMA SÜRECİ OTOMASYONU YÜKSEK LİSANS TEZİ Elk. Müh. Kerem ÖLMEZ Anabilim Dalı : ELEKTRİK MÜHENDİSLİĞİ Programı : KONTROL ve OTOMASYON
M20R PH Kullanma Talimatı
 M20R PH Kullanma Talimatı 10.2010.R01 Kutunun içeriği Ölçüm cihazı, kullanma talimatı, montaj aksesuarları, sigorta. Genel özellikler Ölçüm aralığı 0-14 ph İşlevler Ölçüm, kontrol ve ph regülasyonu Çözünürlük
M20R PH Kullanma Talimatı 10.2010.R01 Kutunun içeriği Ölçüm cihazı, kullanma talimatı, montaj aksesuarları, sigorta. Genel özellikler Ölçüm aralığı 0-14 ph İşlevler Ölçüm, kontrol ve ph regülasyonu Çözünürlük
SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ
 SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ Fan yükleri, uygulama ihtiyaçları ve bu uygulamayı motor hız kontrol cihazları ile çözerken, uygulamanın özel ihtiyaçlarının neler olabileceğine daha yakından
SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ Fan yükleri, uygulama ihtiyaçları ve bu uygulamayı motor hız kontrol cihazları ile çözerken, uygulamanın özel ihtiyaçlarının neler olabileceğine daha yakından
L300P GÜÇ BAĞLANTISI BAĞLANTI TERMİNALLERİ
 L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak