KANAT ÖN KANAT ETKİLEŞİMİ EN-İYİLEŞTİRMESİ BİTİRME ÇALIŞMASI. Tunahan ULU. Uçak Mühendisliği. Tez Danışmanı: Prof. Dr. M.
|
|
|
- Nilüfer Ceren Uygun
- 5 yıl önce
- İzleme sayısı:
Transkript
1 İSTANBUL TEKNİK ÜNİVERSİTESİ UÇAK VE UZAY BİLİMLERİ FAKÜLTESİ KANAT ÖN KANAT ETKİLEŞİMİ EN-İYİLEŞTİRMESİ BİTİRME ÇALIŞMASI Tunahan ULU Uçak Mühendisliği Tez Danışmanı: Prof. Dr. M. Adil YÜKSELEN HAZİRAN 2018
2
3 İSTANBUL TEKNİK ÜNİVERSİTESİ UÇAK VE UZAY BİLİMLERİ FAKÜLTESİ KANAT ÖN KANAT ETKİLEŞİMİ EN-İYİLEŞTİRMESİ BİTİRME ÇALIŞMASI Tunahan ULU ( ) Uçak Mühendisliği Tez Danışmanı: Prof. Dr. M. Adil YÜKSELEN HAZİRAN 2018
4
5 İTÜ, Uçak ve Uzay Bilimleri Fakültesinin numaralı öğrencisi Tunahan ULU ilgili yönetmeliklerin belirlediği gerekli tüm şartları yerine getirdikten sonra hazırladığı KANAT ÖN KANAT ETKİLEŞİMİ EN-İYİLEŞTİRİLMESİ başlıklı tezini aşağıda imzaları olan jüri önünde başarı ile sunmuştur. Tez Danışmanı : Prof. Dr. M. Adil YÜKSELEN İstanbul Teknik Üniversitesi Jüri Üyeleri : Prof. Dr. Gökhan İNALHAN İstanbul Teknik Üniversitesi Dr. Öğr. Üye. Hayri ACAR İstanbul Teknik Üniversitesi Teslim Tarihi : 28 Mayıs 2018 Savunma Tarihi : 11 Haziran 2018 iii
6
7 Zordur, İstemesen de bazı anlar tek başına kalmak Öylece çekilip köşene beklemek Sabretmek bazen, ne yapacağından emin olmadan Zordur, Uzun uzun düşünüp bir sonuca varamamak Ne yapıyorum, ne yapmalıyım Sorularla kalmak bazen, ne yapacağından emin olmadan Zordur, Nasıl büyük adam olacağını bilmek Hedefini kendi mutluluğun için seçmek Zamanını tüketmek bazen, ne yapacağından emin olmadan Zordur, En ufak bir bilgiye ulaşmak Emek harcamak, ben başarmalıyım demek Kendine güvenmek bazen, ne yapacağından emin olmadan Tüm zorlukların aslında kolaylıklar olduğunu öğreten; Aileme, v
8
9 ÖNSÖZ Geniş bilgi birikimi ve tecrübesiyle çalışmam süresince benden desteğini ve yardımını esirgemeyen, sayın hocam Prof. Dr. M. Adil Yükselen e ve üniversite eğitimimde her zaman bana yol gösteren sayın hocam Dr.Öğr.Üye. Özge Özdemir e sonsuz saygı ve şükranlarımı sunarım. Beni her zaman destekleyen arkadaşlarıma ve kıymetli hocalarıma teşekkürü bir borç bilirim. Haziran 2018 Tunahan ULU vii
10
11 İÇİNDEKİLER ÖNSÖZ... vii İÇİNDEKİLER... ix KISALTMALAR... xiii TABLO LİSTESİ... xvii ŞEKİL LİSTESİ... xix ÖZET... xxv SUMMARY... xxvii 1. GİRİŞ UÇAKLARDA TAŞIMA Sonlu Kanat İncelemeleri Girdapların Sonlu Kanat Üzerinde Etkileri Yüksek Açıklık Oranlı Düz Kanat Düşük Açıklık Oranlı Düz Kanat GİRDAP KAFES YÖNTEMİ UYGULAMALARI Doğrusal Girdap Kafes Yöntemi (DGKY) Gerekli Parametrelerin Tanımlanması Geometrinin Oluşturulması Paneller Üzerine Girdapların Yerleştirilmesi İz Bölgesinin Elde Edilmesi Girdap Kafes Yöntemi Kontrol Noktalarının Seçilmesi Girdap Kafes Yöntemi Matematiksel Modelleme Doğrusal Girdap Kafes Yöntemi Çözümlemesi Doğrusal Girdap Kafes Yöntemi Aerodinamik Katsayıların Hesaplanması Doğrusal Girdap Kafes Yöntemi Sonuçlar ve Karşılaştırmalar Doğrusal Olmayan Girdap Kafes Yöntemi (DOGKY) İz Bölgesinin Yeniden Düzenlenmesi Doğrusal Olmayan Girdap Kafes Yöntemi (DOGKY) Doğrusal Olmayan Girdap Kafes Yöntemi Yakınsama Testi Doğrusal Olmayan Girdap Kafes Sonuçların Karşılaştırılması KANARD-KANAT ETKİLEŞİMİ Kanat-Kanard Etkileşimi Karşılaştırma Kanat-Kanard Etkileşimi Sonuçların Değerlendirilmesi ix
12
13 Değişen Kanard AR Değişen Ok Açısı Değişen Düşey Konum Değişen Yatay Konum SONUÇLARIN DEĞERLENDİRİLMESİ KAYNAKLAR xi
14
15 KISALTMALAR AR : Açıklık oranı (Aspect Ratio) b : Kanat açıklığı (Wing span) S : Kanat üst görünüm alanı (Wing planform area) c : Ortalama veter (Mean chord) c r : Kök veter (Root chord) c t : Uç veter (Tip chord) Λ : Ok açısı (Sweep angle) λ : Sivrilme oranı (Taper ratio) γ : Dihedral açısı (Dihedral angle) α : Hücum açısı (Angle of attack) a i : İndüklenmiş hücum açısı (Induced angle of attack) a eff : Efektif hücum açısı (Effective angle of attack) V : Serbest akış hızı (Free stream velocity) u, v, w : Hız vektörü bileşenleri (Velocity vector components) x, y, z : Kartezyen koordinatlar (Cartesian coordinates) NI : Veter boyunca panel sayısı (Panel number along the chord) NJ : Açıklık boyunca panel sayısı (Panel number along the span) NW : İz bölgesi girdap sayısı (Number of free wake vortices) Γ : Sirkülasyon şiddeti (Circulation stregth) ρ : Yoğunluk (Density) t : Zaman parametresi (Time parameter) n : Birim normal vektörü (Normal vector) xiii
16
17 ζ : Yüzey dik vektörü (Surface normal vector) L : Taşıma kuvveti (Lift force) D i : İndüklenmiş sürükleme kuvveti (İnduced drag force) P : Basınç kuvveti (Pressure force) F : Toplam kuvvet (Total force) C l : Taşıma katsayısı (Lift coefficient) Cd i : İndüklenmiş sürükleme katsayısı (Induced drag coefficient) C p : Basınç katsayısı (Pressure coefficient) C F : Kuvvet katsayısı (Force coefficient) ε : Tekillik sınırı (Epsilon) Re : Reynolds sayısı (Reynolds number) q : Dinamik basınç (Dinamic pressure) : Potansiyel fonksiyonu (Potential function) DGKY : Doğrusal girdap kafes yöntemi (Linear vortex lattice method) DOGKY : Doğrusal olmayan girdap kafes yöntemi (Non-linear vortex lattice method) PLL : Prandtl taşıyıcı çizgi (Prandtl Lifting Line ) nwing : Taşıyıcı yüzey sayısı (Number of wings) xh : x-yönünde öteleme (Transition at x-direction) yh : y-yönünde öteleme (Transition at y-direction) zh : z-yönünde öteleme (Transition at z-direction) a inc : Kanard konum açısı (Canard incidence) a inw : Kanat konum açısı (Wing incidence) xv
18
19 TABLO LİSTESİ Tablo 1.1: Yaklaşma karakteristikleri [9]... 1 Tablo 3.1: Köşe noktaları dağılımı Tablo 3.2: MAYwing ve ULU-Multivortex program giriş parametreleri Tablo 3.3: MAYwing ve ULU-Multivortex sonuçların karşılaştırılması Tablo 3.4: ULU-MultiVortex giriş parametreleri Tablo 3.5: XFLR5-ULU Karşılaştırma parametreleri Tablo 3.6: XFLR5-ULU Karşılaştırma sonuçları Tablo 3.7: Karışık geometri karşılaştırma parametreleri Tablo 4.1: ULU-Multivortex giriş parametreleri Tablo 4.2: Aerodinamik katsayıların değişimi Tablo 4.3: Elde edilen kanat-kanard geometri giriş parametreleri Tablo 4.4: Başlangıç geometri giriş parametreleri Tablo 5.1: Elde edilen kanard ve kanat geometrisi program giriş parametreleri xvii
20
21 ŞEKİL LİSTESİ Şekil 1.1: Doğrusal olmayan girdap teorileri [12]... 2 Şekil 1.2: Model-B aerodinamik katsayıların hücum açısına göre değişimi [12]... 3 Şekil 2.1: Profil karakteristik parametreleri [15]... 4 Şekil 2.2: Açıklık boyunca basınç farklından kaynaklı ikincil akımlar... 5 Şekil 2.3: Kanat ucu girdapları oluşumu... 5 Şekil 2.4: Fluid Motion (Dyke. M.V.) albümünden alınanan düşük hızda sonlu kanat üzerinden geçen akım görüntüleri [2]... 6 Şekil 2.5: Kanat ucu girdapları görünümü [18]... 6 Şekil 2.6: Lanchester girdap sistemi [7]... 7 Şekil 2.7: PLL Teoremi girdap yerleşimi [15]... 8 Şekil 2.8: Açıklık Boyunca atnalı girdap yerleşimi [15]... 9 Şekil 2.9: Sonlu kanat geometrisi... 9 Şekil 2.10: Farklı açıklık oranına göre taşıma dağılımı [4] Şekil 2.11: Taşıyı çizgi ve panel yöntemi fakları [4] Şekil 2.12: Dikdörtgensel kanatta taşıma eğrisi [4] Şekil 2.13: Ok açısı ve dihedral açısı Şekil 2.14: Panel metotları ve taşıyıcı çizgi teoremi karşılaştırması Şekil 3.1: Doğrusal girdap kafes yöntemi akış diyagramı Şekil 3.2: Kanat üst görünümü Şekil 3.3: Panellerin oluşturulması Şekil 3.4: Girdap köşe noktalarının gösterimi Şekil 3.5: İz bölgesi girdap gösterimi Şekil 3.6: İz bölgesi girdap köşe noktalarının gösterimi Şekil 3.7: Panel normal vektörleri gösterimi Şekil 3.8: Kontrol noktası gösterimi Şekil 3.9: Ağ yapısı atnalı girdap yerleşimi [15] Şekil 3.10: Biot-Savart yasası [16] Şekil 3.11: Biot-Savart yasası girdap uygulaması [15] Şekil 3.12: Bir doğrusal girdap parçasının indüklemesi [15] Şekil 3.13: Atnalı modeli [8] Şekil 3.14: Atnalı girdabı gösterimi [15] Şekil 3.15: Atnalı girdapları çakışması [15] Şekil 3.16: Girdap parçaları düzeni [15] Şekil 3.17: Girdapların yeniden düzenlenmesi Şekil 3.18: Dikey basınç bileşeni gösterimi [3] Şekil 3.19: Aerodinamik kuvvetler gösterimi Şekil 3.20: Doğrusal girdap kafes yöntemi bilgisayar programı çalışma prensibi Şekil 3.21: Geliştirilen programdan alınan görüntü (10 o hücum açısı) Şekil 3.22: MAYwing (10 o hücum açısı) Şekil 3.23: Giriş parametrelerine göre elde edilen yapı Şekil 3.24: Program ara yüzünden alınan girdi parametreleri ve aerodinamik katsayılar Şekil 3.25: Doğrusal olmayan girdap kafes yöntemi akış diyagramı [12] Şekil 3.26: Serbest iz bölgesi tanımlanması Şekil 3.27: Kontrol noktasında indüklenen hız Şekil 3.28: Yeni girdap köşe noktasının hesaplanması xix
22
23 Şekil 3.29: Geride kalan iz bölgesinin yeniden düzenlenmesi Şekil 3.30: Yeni girdap köşe noktalarının hesaplanması Şekil 3.31: Doğrusal olmayan ULU-Multivortex yazılımı akış diyagramı Şekil 3.32: Kanat ucu girdapları sarmalanması yakınsama Şekil 3.33: Kanat ucu sarmalanması yakınsama Şekil 3.34: Kanat ucu sarmalanması Şekil 3.35: NACA0010 ve düz levha gösterimi Şekil 3.36: XFLR5 2-D analiz Şekil 3.37: XFLR5 3-D analiz Şekil 3.38: XFLR5 ve ULU-Multivortex panel gösterimi Şekil 3.39: ULU-Multivortex girdap dolanması gösterimi (α=15 o ) Şekil 3.40: XFLR5 ve ULU-Multivortex girdap gösterimi Şekil 3.41: Cl-Alfa grafik karşılaştırması Şekil 3.42: Cdi-Alfa grafik karşılaştırması Şekil 3.43: Karışık geometri karşılaştırması Şekil 3.44: Karışık geometri gösterimi Şekil 4.1: Birden fazla taşıyıcı yüzeyde çözüm ağı kurgusu Şekil 4.2: Doğrusal girdap gösterimi (Adım 2) Şekil 4.3: Kanat geometrisi (Adım 1) Şekil 4.4:Doğrusal olmayan girdap gösterimi (Adım 3) Şekil 4.5: Kanat-kanard gösterimi (Adım 4) Şekil 4.6: Doğrusal girdap gösterimi (Adım 5) Şekil 4.7: Kanat-kanard doğrusal olmayan girdap gösterimi (Adım 6) Şekil 4.8: Kanat üzerinde yük dağılımı değişimi Şekil 4.9: Delta kanat-kanard geometri boyutlandırılması [9] Şekil 4.10: ULU-Multivotex üzerinde elde edilen geometri Şekil 4.11: Kanard girdap etkileşim incelemesi [9] Şekil 4.12: Kanard-kanat etkileşiminin kanard normal kuvveti üzerinde etkisi Şekil 4.13: Kanard-kanat etkileşiminin kanard normal kuvveti üzerinde etkisi Şekil 4.14: Kanard-kanat etkileşiminin kanard normal kuvveti üzerinde etkisi Şekil 4.15: Kanardın taşıma katsayısı üzerinde etkisi [9] Şekil 4.16: Kanard konumuna göre Cl değişimi [9] Şekil 4.17: Kanard konum parametreleri geometri gösterimi Şekil 4.18: Taşıma katsayısının kanard geometrisine göre değişimi Şekil 4.19: Sürükleme katsayısının kanard geometrisine göre değişimi Şekil 4.20: Verimin kanard geometrisine göre değişimi Şekil 4.21: Değişen kanard geometrisine göre kanat ve kanard üzerinde yük dağılımları Şekil 4.22: Değişen kanard ok açsının geometrik gösterimi Şekil 4.23: Değişen ok açının taşıma üzerinde etkisi Şekil 4.24: Değişen ok açısının sürükleme üzerinde etkisi Şekil 4.25: Değişen ok açısının verim üzerinde etkisi Şekil 4.26: Değişen düşey konumun taşıma üzerinde etkisi Şekil 4.27: Değişen düşey konumun sürükleme üzerinde etkisi Şekil 4.28: Değişen düşey konumun verim üzerinde etkisi Şekil 4.29: Değişen düşey konumun kanat yük dağılımı üzerinde etkisi Şekil 4.30: Değişen kanard yatay konumunun geometrik gösterimi Şekil 4.31: Değişen yatay konumun taşıma üzerinde etkisi xxi
24
25 Şekil 4.32: Değişen yatay konumun sürükleme üzerinde etkisi Şekil 4.33: Elde edilen kanard-kanat geometrisi Şekil 5.1: Kanardın toplam taşıma katsayısı üzerinde etkisi Şekil 5.2: Kanardın toplam indüklenmiş sürükleme katsayısı üzerinde etkisi Şekil 5.3: 10 o hücum açısında programdan alınan önden görünüm (kanard konum açısı=10 o ) Şekil 5.4: 10 o hücum açısında programdan alınan arkadan görünüm (kanard konum açısı=10 o ). 81 Şekil 5.5: 10 o hücum açısında programdan alınan üstten görünüm (kanard konum açısı=10 o ) Şekil 5.6: Programdan alınan aerodinamik katsayılar xxiii
26
27 KANAT ÖN KANAT ETKİLEŞİMİ EN-İYİLEŞTİRİLMESİ ÖZET Serbest akış içerisine yerleştirilen bir taşıyıcı yüzey sahip olduğu geometriden kaynaklı akımda sapmalara sebep olmaktadır. Özellikle kanat geometrileri taşıma elde etmesi hedeflenerek tasarlanmaktadır. Bir kanat tarafından elde edilecek taşıma ve indüklenmiş sürükleme kuvvetlerini hesaplama aşamasında girdap kafes yöntemi kullanılan modellemelerdendir. Bu modelleme kanadı açıklık ve veter boyunca farklı sayıda panel sayılarında ayırmaktadır. Ardından her bir panel üzerine atnalı girdap sistemleri yerleştirilir. Bir taşıyıcı yüzey için aerodinamik katsayıların hesaplanması aşamasında atnalı girdapları firar kenarından serbest akım doğrultusunda doğrusal olarak serbest bırakılıp işlem yapılabilir. Firar kenarından doğrusal olarak serbest bırakılan girdap sistemi iz bölgesinde kanat ucu ve kaçma girdaplarının modellenmesinde eksik kaldığı için iz bölgesinin yeniden düzenlenmesi gerekmektedir. İz bölgesini yeniden düzenlemek için kullanılan zaman adımı yöntemi akımın serbest akım hızına göre sabit bir zaman adım katsayısı ile bir adım sonraki konumunu hesaplamak için kullanılan bir yöntemdir. Zaman adımı yöntemi ile firar kenarına ek olarak hücum kenarından serbest bırakılan girdapların da birbirleri üzerlerinde sarmalanmalarını bu sayede doğrusal olmayan bir değişimi incelemek mümkündür. Bir taşıyıcı yüzey için tasarlanan girdap kafes yöntemi birden fazla yüzey için kullanılabilir hale getirilebilmektedir. Bu sayede kanat-kuyruk, kanat-ön kanat ya da birden fazla yüzeyle oluşturulmuş bir tasarımın incelenmesine olanak sağlamaktadır. Bu çalışmada birden fazla taşıyıcı yüzeyi modelleyecek şekilde doğrusal olmayan girdap kafes sistemi programı kurgulanmış ve MATLAB programı ile görselleştirilmiştir. Bu girdap kafes sistemi ile özellikle kanard yapıları üzerine incelemeler yapılmıştır. Özellikle kanardın geometrik ve konum parametrelerinin kanat aerodinamik katsayılarında ve toplam aerodinamik katsayılarda etkisinin ne olacağı incelenmiştir. Bu çerçevede farklı açıklık oranı, ok açısı ve yatay-düşey konuma sahip kanardların etkileri incelenmiştir. Kanard yapıları kanada göre serbest akım ile ilk karşılaşan ve akımda ilk bozuntuya sahip olan yapılardır. Kanardın düşey konumuna göre firar kenarından ayrılan girdaplar taşıma katsayısını artırıcı ya da yüksek hücum açılarına çıkıldığında azaltıcı bir etki göstermektedir. Ek olarak kanardın açıklık oranına ve uzunlamasına konumuna bağlı olarak kanat üzerinde oluşan yük dağılımları değişim göstermektedir. Bu yük dağılımlarının toplam taşıma ve sürükleme katsayısı üzerinde etkili olduğu görülmektedir. xxv
28
29 OPTIMIZATION OF WING-FORWARDWING INTERACTION SUMMARY When a lifting plane was placed in a flow field, the stream is redirected because of the geometry of plane and it is concluded deflection. Especially, the wings are designed to achieve the lift using the geometry. Vortex lattice method is a method to calculate the produced lift and induced drag due to the wing geometry. In this method, the geometry is allocated the panels along both the chord and span. After that, the horseshoe vortex systems are placed on the wing surface using the potential flow function. The magnitudes of the vortex are obtained after the systematic solution on the control points. The solution can be done using the linear vortex system, which is replaced from trailing edge to calculate the aerodynamic coefficients. The wake region have to be rearranged because of the fact that the vortex system released from trailing edge is deficient to model the wing tip vortex. The time step method is used to rearrange the wake region. The method predicts the next positon of vortex using the flow conditions and time step coefficient. The time step method allows the arranging of all vortex geometry and after the leading edge vortex is released with trailing edge vortex, the nonlinear variation is examined. The nonlinear vortex lattice method can be developed to observe the complex configurations, for instance canard-wing and wing-tail. In this project, the non-linear vortex lattice method has been developed using the MATLAB to examine the lifting surface more than one, especially canard wing interaction. The effect of geometry and location parameters of canard has been analyzed to observe the changing on the wing aerodynamic and total aerodynamic coefficients. When considering the main parameters, the effects of aspect ratio, sweep angle, vertical and horizontal location of canard have been analyzed. Canard is a surface that encounters the flow firstly, and it changes the direction of flow. The vortexes separated the canard according to the its vertical position, affects the aerodynamic coefficients positively or negatively depends on the high angle of attack. In addition to this, the lift distribution on the wing changes depends on the aspect ratio and horizontal location of canard. It is observed that these changes have powerful effects on the lift and induced drag coefficient. xxvii
30
31 1. GİRİŞ Kanatlar bir uçağın uçması için gerekli olan taşımanın elde edildiği ana yapılardır. Uçağın görevine ve uçuş koşullarına göre farklı kanat tasarımları mevcuttur. Uçak tasarımlarında daha iyi aerodinamik özellikler elde etmek için farklı eklentiler kullanılmaktadır. Bir savağı uçağı tasarımda düşük hızlarda yüksek taşıma elde etmeye ve yüksek hücum açılarına çıkmaya yönelik tasarlanan kanard yapıları buna bir örnektir. Kanard, bir uçağın kontrol ve aerodinamik karakteristiklerinin artırılması için kullanılan bir ön eklentidir. Uçak tarihinde araştırmalar yapıldığında Wright kardeşlerin kanardı yatay dengeleyici olarak kullanıldığı bir ayrıntı olarak karşımıza çıkmaktadır. Kanardların, kanat konumuna yakınlık ve sahip oldukları açıklık oranına göre kanat üzerinde serbest akımın yönün saptırılması şeklinde etkileşimleri söz konusudur. Kanard manevra kabiliyetine ve moment düzeltme gereksinimlerine yardımcı olmaktadır, ayrıca kanat üzerinde etkileşimleri, kanadın taşımasını artırıcı ve düzeltme (trim) sürüklemesini azaltıcı yönde olmaktadır (Samimi, Davari ve Soltani, 2013). Tablo 1.1 üzerinde üç farklı uçak tipi için, ilki geleneksel kanat-kuyruk, ikincisi sadece delta kanat ve üçüncüsü kanard kanat, taşıma katsayıları incelenmiştir. Tablo 1.1: Yaklaşma karakteristikleri [9] Ayrıca kanard yapıları kısa mesafede iniş kalkış yapmak ve yüksek hücum açılarında tutunma karakteristiğini artırmak için kullanılmaktadır. Kanard ve kanat arasında oluşan etkileşim hem kanadın hem de kanardın sahip olduğu aerodinamik özellikleri değiştirmektedir. 1
32 Bitirme çalışması kapsamında kanardın kanat üzerinde etkileşimi ile aerodinamik katsayılar üzerinde sahip olduğu etkinin incelenmesi hedeflenmiştir. Bu incelemeyi yapmak için ilk bölüm bir sonlu kanadın sahip olduğu karakteristikler ve girdap etkileri ardından diğer bölümler sırasıyla inceleme yapmak için kullanılacak olan yöntemin tasarlanma adımları ve birden fazla taşıyıcı yüzey ile etkileşim sonuçlarının elde edilmesi şeklinde sıralanmıştır. Taşıyıcı yüzeylerde aerodinamik katsayılarının elde edilmesi için ayrıntılı analiz programlarına ihtiyaç duyulmaktadır. Bilgisayar tabanlı akışkan dinamiğinin, sonlu hacimler yöntemleri ile ayrıntılı çözümlemelerin elde edilmesinde uzun süreler gerekmektedir. Tez kapsamında panel yöntemleri kullanılarak bir yaklaşım ile herhangi bir aracın ön tasarım aşamasında tekrarlanabilir, hızlı ve aktif kullanım için bir inceleme yapılması amaçlanmıştır. Zaman faktörü göz önüne alındığında bu hesaplamaların ses altı hızlarda yapılması aşamasında panel yöntemlerinin kullanılması hız açısından daha etkilidir. Bu çerçevede panel yöntemlerinde doğrusal modeller firar kenarı girdap etkileşimlerini anlamamıza yardımcı olabilmektedir. Fakat bu teoriler hücum kenarından ayrılan girdapları modellemede eksik kalmaktadır. Girdap kafes yönteminde hücum kenarı girdaplarını serbest bırakmak yerine akımın yüzeyi takip edip, firar kenarından ayrıldığı kabulü yapılmaktadır. Özellikle taşıyıcı yüzeyin açıklık oranına bağlı olarak akımda meydana gelen girdaplar kısa mesafelerde sarmalanma hareketine başlar ve akımda sapmalara sebep olur. Bu aşamada doğrusal olmayan girdap kafes yöntemi kullanarak yüzey üzerinden serbest bırakılan girdapların etkisi incelenebilmektedir. Artan hücum açısına bağlı olarak kanat ucu ve firar kenarı girdaplarının sarmalanmaya başlaması ve akımda oluşturduğu sapma miktarları değişmektedir. Bu sayede doğrusal olmayan bir dağılım elde edilebilmektedir. Şekil 1.1: Doğrusal olmayan girdap teorileri [12] 2
33 Josef ROM un 1990 yılında doğrusal olmayan girdap kafes yöntemi ile yaptığı bir çalışmasında kanard-kanat etkileşimi ve aerodinamik katsayılar üzerindeki etkileri deneysel verilerle karşılaştırmıştır. Şekil 1.2 de ifade edilen kanat-kanard verileri δc=0 için European model B üzerinde elde edilmiştir. Şekil 1.2: Model-B aerodinamik katsayıların hücum açısına göre değişimi [12] Girdapların doğrusal olmayan girdap kafes yöntemi ile elde edilmesinin sonucunda birbirleri üzerinde etkileşimleri ve aerodinamik katsayılara etkisi incelenebilmektedir. Bu çalışmayı kontrollü bir biçimde ilerletebilmek için öncelikle dikdörtgensel üst görünümlü bir taşıyıcı yüzey ele alıp bunun üzerinde değişim ve girdap oluşumlarının incelenmesi doğru sonuca ulaşmak için bir ara adım olarak görülmektedir. Ardından yüksek ok açılı uçaklar için incelemeler yapılabilmektedir. Bitirme çalışması kapsamında kanat ucu ve hücum kenarından ayrılan girdapların kanat, kuyruk ve diğer eklentiler üzerinde etkisi incelenecektir. Bu kapsamda doğrusal olmayan girdap kafes yöntemi alt tabanlı bir program geliştirilecektir. Bu çalışma kapsamında viskozite etkileri göz ardı edilecek ve potansiyel akım yaklaşımları kullanılacaktır. 3
34 2. UÇAKLARDA TAŞIMA 2.1. Sonlu Kanat İncelemeleri Uçaklarda taşımanın ana prensibi kanadın alt yüzeyi ve üst yüzeyi arasında basınç farkı üretmektir. Bu basınç farkı, kanadın sahip olduğu geometrinin bir sonucudur. Bernoulli prensibi gereğince bir akışkanın hızı arttıkça basıncı düşer. Bu prensipten yola çıkarak kanadın üst yüzeyi akışkanı hızlandıracak, alt yüzeyi ise üst yüzeyle karşılaştırıldığında akışın daha yavaş hareket etmesini sağlayacak şekilde tasarlanmalıdır. Basıncın istenilen şekilde elde edilmesi için tasarlanmış su damlasına benzer yapısıyla kanat kesitinde kullanılan geometriye profil adı verilmiştir. Profiller tasarlanan uçağın hedeflenen uçuş koşullarına göre farklı tasarımlar içermektedir. Bir profilde aerodinamik katsayıları etkileyen iki ana parametre profil kalınlığı ve profil kamburluğudur. Şekil 2.1: Profil karakteristik parametreleri [15] Serbest akımın kanat ile ilk etkileşimi hücum kenarında olmaktadır. Ardından geometriye bağlı olarak akım çizgileri alt ve üst yüzeyi takip eder ve firar kenarında tekrar karşılaşırlar. Kutta- Joukowski teoremi (1902) bir kanat profili etrafındaki akımın firar kenarını düzgün ve eşit hızlarda terk edeceğini ifade etmektedir. Teorik olarak iki boyutlu incelemelerde kanat sonsuz uzunluktadır ve kanat üst yüzeyi ile alt yüzeyi arasında kanadın açıklık ekseni boyunca aynı durum gözlemlenmektedir. Basınç sadece kanadın veteri boyunca değişmektedir. İki boyutlu bir kanat incelemesinin ardından gerçekte olan yani sonlu kanatları düşündüğümüzde kanat için bazı parametreler tanımlanmıştır. Özelikle aerodinamik katsayılar üzerinde etkisi olan açıklık oranı (AR) ifadesi kanat açıklığının (b) sol kanadın uç noktası ve sağ kanadın uç noktası arasındaki mesafe, kanat ortalama veterine (c ) bölünmesi ile elde edilir. AR, karışık geometriler için kanat açıklığının karesinin kanat üst görünüm alanına (S) bölünmesi şeklinde geliştirilmiştir. 4

35 AR = b c = b2 S Açıklık oranı (1) Pozitif taşıma elde etmek için kanat kesitinde üst yüzeyde basıncın alta yüzeye göre düşük olduğu ifade edilmiştir. Akışkanlar prensip olarak basıncın yüksek olduğu konumdan düşük olduğu konuma hareket eder. Bu durumda kanadın alt yüzeyinden üst yüzeyine bir akım oluşmaktadır. Bu akım kanat ucundan kaçma akımı şeklinde olacaktır. Şekil 2.2: Açıklık boyunca basınç farklından kaynaklı ikincil akımlar Üç boyutlu bir düzlemde kanat açıklığı Y, kanat veter yönü X ve yükseklik Z ekseni ile ifade edilir ise iki boyutlu akışın aksine kanat ucundan kaçan akım Y yönünde bir akıma sebep olur. Üst ve alt kanattaki akımda meydana gelen bu sapmalar firar kenarından ayrıldıktan sonra serbest akım yönünde sarmal hareket yapacaktır (Bramesfeld, 2006). Ayrıca akımda meydana gelen bu zıt yönlü sapma oluşturduğu hız farkları ile firar kenarı boyunca girdaplar oluşturur. Bu girdaplar kaçış girdapları olarak adlandırılır. Açıklık boyunca oluşan kaçma girdapları kanattan uzaklaştıkça sarmal hale geçer ve bu sarmallar iki büyük girdap haline gelir. Bu girdaplar kanat ucu girdapları olarak adlandırılır. Şekil 2.3: Kanat ucu girdapları oluşumu 5
 albümünden alınanan düşük hızda sonlu kanat üzerinden geçen akım görüntüleri [2] Prandtl taşıyıcı bir yüzeyin açıklık oranının aerodinamik özellikleri üzerinde büyük etkileri")
. Şekil 2.")
36 Van Dyke nin akışkan Fluid Motion albümünden alınan Şekil 2.4 açıklık boyunca kanat ucu girdaplarının ve kaçış girdaplarının iz bölgesini göstermektedir (Cantwell, 2015). Şekil 2.4: Fluid Motion (Dyke. M.V.) albümünden alınanan düşük hızda sonlu kanat üzerinden geçen akım görüntüleri [2] Prandtl taşıyıcı bir yüzeyin açıklık oranının aerodinamik özellikleri üzerinde büyük etkileri olduğunu belirtmiştir. Eşit hücum açısına sahip iki kanat için kanat uçlarına doğru ilerledikçe taşıma yoğunluğu küçük açıklık oranına sahip olanda daha fazla azalacaktır. Ayrıca girdapların etkisinin hesaba katılmasının gerekliliğinin serbest bir akış incelemesinde rahatlıkla görülebileceğini belirtmiştir (Jones, 1979 ). Şekil 2.5: Kanat ucu girdapları görünümü [18] 6
37 2.2. Girdapların Sonlu Kanat Üzerinde Etkileri Lanchester girdapların sonlu kanatlar üzerinde etkilerini ayrıntılı inceleyen isimler arasındadır. Hareket eden bir kanat varsa etrafında hava dolaşımı (sirkülasyon) oluşturur. Lanchester, girdap davranışı gösteren bu oluşuma peripteral motion adını vermiştir. Bu hava hareketi açıklık boyunca bir girdap parçasının yapacağı gibi akış alanı içerisinde hız indükler. Kanat üzerine açıklık boyunca bir girdap konulduğunda bu girdaba bağlı girdap ismi verilir. Bağlı teriminin kullanılmasının sebebi bu girdap parçasının akım ile hareket etmediğini ifade etmektir. Ek olarak Helmotz girdap yasalarına göre uzayda bir girdap başlayıp bitemez. Girdap duvarda sonlanmalı ya da kapalı bir döngü oluşturmalıdır (Karman, 1963). Bu doğrultuda Lanchester bağlı girdabın kanat uçlarında sonlanacağını ve girdabın devamının serbest girdap parçaları şekilde akım yönünde ilerleyeceğini ifade etmiştir. Şekil 2.6 Lanchester ın kanat etrafında oluşacak girdap sistemi modelini göstermektedir. Şekil 2.6: Lanchester girdap sistemi [7] Kanat ucu girdapları, kanadın ön ve arkasındaki akış alanında sapmalara sebep olur. Kanat uçları arasında bu sapma aşağı yönde iken kanat dışında yukarı yöndedir. Firar kenarı yakınlarında akış yönünde aşağı doğru olan girdap indüklemeleri, serbest akım hızlarında yerel olarak değişen aşağı sapma (w) hızlarının oluşmasına neden olur. Kanat açıklığı boyunca kanat üst görünümü ve yük dağılımına bağlı olarak aşağı sapma hızları değişmektedir. Ayrıca aşağı sapma hızları serbest akımın doğrultusunda ve taşıma kuvvetinin doğrultusunda sapma meydana getirir. Akımda meydana gelen bu sapmalar sonucunda taşıma kuvvetinin bir bileşeni sürüklemeye sebep olur. Bu sürükleme kuvvetine indüklenmiş sürükleme adı verilir. Prandtl eliptik bir yük dağılımı için aşağı sapma hızlarının sabit olduğunu elde etmiştir. Bu durum diğer yük dağılımları ile kıyaslandığı zaman indüklenmiş sürükleme kuvveti için en ideal durumdur (Ira, Albert 1949) 7
38 2.3. Yüksek Açıklık Oranlı Düz Kanat Farklı kanat açıklık oranına göre kanat ucu girdaplarının şiddeti ve etkisi değişir. Yüksek açıklık oranına AR > 4 sahip uçakların kanat üst görünümüne göre modellemek için Prandtl (1921) birinci dünya savaşı zamanları çalışmalarını yapmıştır. Sonlu bir kanat için aerodinamik katsayıları hesaplamak için geliştirdiği modele Prandtl Taşıyı Çizgi Teoremi (PLL) adını vermiştir. (Anderson, 1999). Şekil 2.7: PLL Teoremi girdap yerleşimi [15] Helmotz un (1858) geliştirdiği girdap teoremleri (Helmotz Teorem) Prandtl ın çalışmalarının temelini oluşturur. Helmotz birinci girdap yasası uzayda girdap şiddetlerinin korunmasına, ikinci yasası da zamanın korunmasına (time conservation) yöneliktir (Wu, 2018). Birinci teorem akışkanın genel hareketiyle ilgilidir ve bu hareketin lineer hız, ani bükülme gibi olaylarından bazılarını veya hepsini birden içerebileceğini belirtir. İkinci yasa zaman korunması ifadesi, girdabın akışkanın içinde son bulamayacağını ya kapalı bir halka oluşturmak, ya da bir katı yüzeyi ile son bulmak zorunda olduğunu ifade eder. Helmotzun geliştirdiği girdap yasaları gereğince Prandtl geliştirdiği modellemede kanat açıklık doğrultusunda çeyrek veter konumunu referans alarak bir bağlı girdap ve bu girdapların uzantısından atnalı şeklinde ilerleyen bir girdap yapısı kullanmıştır. Bu girdap yapısına atnalı girdabı denir. Kanat üzerine yerleştirilen bağlı girdap taşımayı, atnalı girdapları da kanat ucu girdaplarını temsil etmektedir. Öncelikle Helmholtz girdap yasaları gereği bir girdabın uçları akım alanı içerisinde sonlanamayacağı için serbest kaçma girdapları bağlı girdaptan uzak bir mesafede birleşmektedir. Modellemede ele aldığımız sonlu kanat tek bir atnalı girdabı ile modellenmek istendiğinde, kanat açıklığı boyunca sirkülasyon şiddeti sabit olduğu için taşıma dağılımı modellenemez. Ayrıca firar kenarı kaçma girdapları da modellenemeyeceği için teorem bu şekilde yetersiz kalmaktadır. Ele alınan sonlu kanat tek bir atnalı girdabı yerine açıklık boyunca farklı şiddetlerdeki atnalı girdaplarının iç içe yerleştirilmesi 8

39 sonucunda taşıma dağılımı modellenmiş olur. Ayrıca kaçma girdapları yardımı ile bölgesel olarak aşağı sapma açıları ve efektif hücum açıları saptanmış olur. Şekil 2.8: Açıklık Boyunca atnalı girdap yerleşimi [15] Prandtlın geliştirdiği taşıyıcı çizgi teoremi ile sonlu bir kanat için taşıma kuvveti grafik eğimini tahmin etme şansımız bulunmaktadır. Yüksek açıklık oranlı bir kanat için taşıma eğrisi eğimi denklem (2) yardımı ile elde edilir (Anderson, 1999). a = a 1+ a πare Taşıma eğrisi eğimi (2) Burada a sonlu kanat için taşıma eğrisi eğimini, "a " da iki boyutlu profil eğrisi eğimini radyan olarak tanımlıyor. e ifadesi açıklık oranını ve sivrilme oranını (kanat uç veter uzunluğunun (C t ) kanat kök veter uzunluğuna (C r ) bölünmesi ) içeren geometriye bağlı sabit bir katsayıyı ifade ediyor. Bu katsayı genel olarak mertebelerinde alınır. Şekil 2.9: Sonlu kanat geometrisi 9
40 Denklem (2) e göre AR arttıkça taşıma eğrisi eğimi artmaktadır. Bu sonuca bakarak açıklık oranının artırılmasının kanat ucu girdaplarının etkisini azalttığı yorumu yapılabilmektedir. Anderson ın uçak performansı ve tasarımı kitabında alınan Şekil 2.10 farklı açıklık oranına göre taşıma eğiminin değişiminin deneysel incelemesini göstermektedir. Bu deneysel veriler aynı profilde fakat farklı sivrilme oranlarından kaynaklı farklı açıklık oranlarında elde edilmiştir (Ira, 1949). Şekil 2.10: Farklı açıklık oranına göre taşıma dağılımı [4] 2.4. Düşük Açıklık Oranlı Düz Kanat AR < 4 olduğu durum için denklem (2) taşıma eğrisi eğimini tahmin etmek için çok doğru bir yaklaşım olmamaktadır. Prensip olarak taşıyıcı çizgi teoremi kanat boyunca birden fazla girdaplar ile modelleme yapsa da kanat veter boyunca modellemede bulunmamaktadır. Fakat açıklık oranı küçük olan kanatlar için veter boyunca taşıma dağılımının etkisi yüksek olmaktadır. Bu durumda taşıyıcı çizgi teoremi eksik kalmaktadır. Kanatta potansiyel, sıkıştırılamaz bir akış için veter boyunca taşımayı da incelemenin bir diğer yolu da panel yöntemidir. Panel yöntemleri prensip olarak kanadı açıklık ve veter boyunca faklı sayılarda panellere ayırır ve her panelden faklı tekniklerle bırakılan girdaplar ile taşıma dağılımı her iki yönde elde eder. Açıklık oranı küçük 10
41 kanatlar için panel yöntemleri ile daha doğru sonuç almış oluruz. Şekil 2.11 iki modelleme arasındaki farklı göstermektedir (Anderson, 1999). Şekil 2.11: Taşıyı çizgi ve panel yöntemi fakları [4] Eliptik düz bir kanatta düşük açıklık oranında taşıma eğrisi eğimi için yaklaşık bağıntıyı 1942 yılında H.B.Helmbold elde etmiştir (Anderson, 1999). a = a 1+[ a 0 πar ]2 + a 0 πar Helmbold denklemi (3) Helmblod un denklemi incelediğinde denklem (2) e ek olarak paydada açıklık oranının kökü ile bağıntılı bir ifadenin daha yer aldığını görülmektedir. Açıklık oranının 4 ten küçük olduğu durumda denklem (3) Prantl taşıyıcı çizgi teoremine göre daha doğru sonuç vermektedir. Şekil 2.12 dikdörtgensel bir kanat üzerinde iki yöntemin açıklık oranına bağlı olarak deneysel verilerle karşılaştırılmasını göstermektedir. 11

42 Şekil 2.12: Dikdörtgensel kanatta taşıma eğrisi [4] Dikdörtgensel kanat üzerinde Prantl ve Helmbold yöntemleri incelendiği zaman, düşük açıklık oranları için deneysel veriler ve Prantl teoremi arasında farkların arttığını görmekteyiz. Örneğin 1 açıklık oranına sahip verileri incelediğimizde taşıma eğrisi eğiminde %25 e varan farklılıklar söz konusudur. Sonlu kanat incelemeleri kısmında Prandtl taşıyıcı çizgi teoremi ayrıntılı olarak incelendi. Açıklık oranı düşük olan kanatlarda doğru bir yaklaşım yapmak için bu teoremin daha farklı uygulamalarının yapılması gerekmektedir. Ayrıca teorem veter boyunca bağlı girdaplar ele aldığı için ok açısı ve dihedral açısı gibi kanat görünüm değişikliklerinde doğru bir yaklaşım değildir. Şekil 2.13 kanat üzerinde parametreleri göstermektedir. Şekil 2.13: Ok açısı ve dihedral açısı 12

43 Ok açısı verilmiş bir kanat için taşıyıcı çizgi teoremi ile inceleme yapmak istediğimiz zaman Şekil 2.14 de sağ üstte gösterilen bir şekilde girdap dağılımını incelemiş oluyoruz. Yaklaşım olarak panel yöntemleri taşıyıcı yüzeyi açıklık ve veter boyunca farklı sayıda panellere bölüp her panel için inceleme yapmaktadır. Bu sayede ok açısı ve dihedral açısı verilmiş bir kanadı inceleme fırsatı buluyoruz. Şekil 2.14: Panel metotları ve taşıyıcı çizgi teoremi karşılaştırması Bu çerçevede hem açıklık hem veter boyunca yük dağılımını karışık bir geometride elde etmek için panel yöntemleri kullanılabilir aktif yöntemlerdir. Panel yöntemlerinde girdap dağılımları, kaynak dağılımları ve double akım dağılımları kullanarak faklı yüzeylerde inceleme yapmak mümkündür. Kaynak ve double akımlarının kullanımına gövde ve kalınlığa sahip yüzeylerde karşılaşmaktayız. Bu incelemede düz bir levha üzerinde çalışmalar hedeflenmiş ve bu doğrultuda sadece girdap yöntemlerini kullanarak aerodinamik katsayıları ve yük dağılımlarını bulmaya yönelik çalışılmıştır. Girdap kafes yöntemleri incelemeleri için önce doğrusal ardından doğrusal olmayan yöntem ve son olarak doğrusal olmayan girdap kafes yönteminin birden fazla yüzey üzerinde çalışma prensibi anlatılmıştır. 13
44 3. GİRDAP KAFES YÖNTEMİ UYGULAMALARI 3.1. Doğrusal Girdap Kafes Yöntemi (DGKY) Bu çalışmada girdap kafes yöntemi ile bir yazılım geliştirilip inceleme yapılacaktır. Bu yöntem kanadı hem veter hem açıklık boyunca farklı panellere ayırır. Matematik modelde her bir panel üzerinde bir atnalı girdabı oluşturulur. Atnalı girdabının kolları yüzeyi terk ettikten sonra serbest akım doğrultusunda sonsuza gitmektedir. Yüzeyi terk eden girdaplar için farklı yöntemler mevcuttur. Birinci yöntem taşıyıcı yüzeyden ayrılan atnalı girdapları tek bir girdaptır ve serbest akım doğrultusunda sonsuza ilerlemektedir. İkinci yöntemde ise yüzeyden ayrılan atnalı girdapları birden fazla parça halinde akım doğrultusunda serbest bırakılır. Bunu yapmaktaki amaç ilk hesaplamanın ardından girdap uç noktalarındaki hızlara göre tekrarlı olarak en doğruya yaklaşmaktır. Buna ek olarak akım doğrultusunda serbest bırakılan girdaplar Lanchesterın girdap sisteminde ifade edildiği gibi birbirleri üzerinde sarmalanma gösterecektir. Açıklık oranı yüksek olan uçaklar için kanat ucu girdaplarının sarmalanması ile elde edilen çözümlemenin doğrusala yakın olması beklenebilir fakat daha düşük açıklık oranlarında ve farklı hücum açılarında elde edilen girdap şiddetleri ve sarmalanmalardaki değişiklikler ile doğrusal olmayan bir etki gözlemleme fırsatı olacaktır. Ayrıca kanattan ayrılan girdapların kuyruk üzerinde ya da kanadın önünde bulunan bir yüzeyin oluşturduğu girdapların etkisini incelemede doğrusal olmayan girdap kafes yöntemi daha doğru sonuç verecektir. Girdap kafes yöntemi çalışmasında doğrusal olmayan girdap kafes yönteminin, doğrusal girdap kafes yöntemine göre farkı girdapların birbiri üzerine sarmalanması ve akımda oluşturdukları etkilerden kaynaklanmaktadır. Bu aşamada öncelikle doğrusal girdap kafes yöntemi (DGKY) ile çözümlemeler yapılıp ardından doğrusal olmayan girdap kafes yöntemi (DOGKY) ile çözümlemeler yapılacaktır. Bir bilgisayar programı ile inceleme yapmak için yöntemin matematiksel modelinin ve çalışma mantığının kurgulanması gerekmektedir. Bir kanat üzerinde inceleme yapmak için geometri ve potansiyel akım çözümlemesinde gerekli sınır koşullarına ihtiyaç vardır. Matematiksel modellemede tek bir çözüm ağı kurgulanabileceği gibi farklı bölümlere ayırıp her bölümü kendi içinde ayrı kurgulamakta mümkündür. Şekil 3.1 doğrusal girdap yöntemi için kullanılan akış diyagramını göstermektedir. 14
45 ANA PROGRAM Gerekli Parametreler Geometri Hesaplamaları Panellerin Oluşturulması İz Bölgesinin Oluşturulması Çözümlemenin Yapılması Aerodinamik Katsayıların Hesaplanması Şekil 3.1: Doğrusal girdap kafes yöntemi akış diyagramı Gerekli Parametrelerin Tanımlanması Uzayda bir eksen takımına bağlı olarak bir taşıyıcı yüzey (kanat) tanımlanmak için en az iki parametre gerekmektedir. İki parametre ile dikdörtgensel üst görünümlü bir kanat tanımlamak mümkündür. Fakat kanada değişimler ve farklı üst görünümler vermek için parametre sayısının artırılması gerekir. Kanat üst görünümüne bağlı olarak, bir kanat için kanat açıklık oranı (AR), kanat planform alanı (S), ok açısı (Λ), sivrilme oranı (λ), dihedral açısı (γ), kanat uç veter (c t ) ve kanat kök veter (c r ) parametreleri ile ifade edilir. Denklem (1) de AR nin belirlenmesinde kullanılan ortalama veter (c ) değeri kanat uç veteri ile kanat kök veterinin ortalaması şeklinde hesaplanır. Eksen takımından bağımsız serbest akış hızı (V ) ve hücum açısı (a) ile ifade edilir. Her bir parametre kanat açıklık boyunca faklı değişimler gösterebilir. Bir kanat tasarımında birden fazla ok açısı, sivrilme oranı ve dihedral açısı kullanmak mümkündür. Girdap kafes yöntemi çalışmasında kalınlığı olmayan taşıyıcı yüzeyler ele alınmıştır, bu anlamda profil girdilerine ihtiyaç yoktur. 15
 ve (NJ) ile ifade edilir.")

46 Şekil 3.2: Kanat üst görünümü Geometrinin Oluşturulması Bir kanadın elde edilmesi için gerekli parametrelerin girdi olarak girilmesinin ardından girdap kafes yöntemi için geometrinin oluşturulması gerekmektedir. Dikdörtgensel üst görünümlü bir kanat ele alındığı zaman burada x ve y yönünde panel sayıları sırası ile (NI) ve (NJ) ile ifade edilir. Panel köşe noktaları (P) şeklinde bir vektör ile tanımlanır ise bu vektör uzayda x, y ve z bileşenlerine sahip olacaktır. Üç boyutlu düzlemde z ekseni yüksekliği xy düzlemi ise kanat üst görünümünü ifade edecek şekilde seçilir. Ayrıca x ve y eksenleri yönünde P noktaları için bir düzen oluşturulur. Bu düzende P noktaları bir matris şeklinde ifade edilebilir. Şekil 3.3, x yönünde 2 ve y yönünde 5 panel seçilerek oluşturulan geometri için P noktalarının matris düzenini göstermektedir. Şekil 3.3: Panellerin oluşturulması 16

47 Panel köşe noktalarının tanımlanmasında kullanılan P matrisinin elemanları da birer matris olarak tanımlanmıştır. Burada 10 birim açıklığa ve 1 birim vetere sahip bir kanat için ele alınan P matrisi Tablo 3.1 üzerinde ayrıntılı olarak görülmektedir. [0-5 0] [0-3 0] [0-1 0] [0 1 0] [0 3 0] [0 5 0] [ ] [ ] [ ] [ ] [ ] [ ] [1-5 0] [1-3 0] [1-1 0] [1 1 0] [1 3 0] [1 5 0] Tablo 3.1: Köşe noktaları dağılımı Paneller Üzerine Girdapların Yerleştirilmesi Prandtl taşıyıcı çizgi teoreminde bağlı girdabın çeyrek veter noktasında olması gerektiğini ifade etmiştir. Girdap kafes yönteminde de x yönünde birden fazla panele ayırılan kanat üzerinde her bir panelin çeyrek veterine bir bağlı girdap yerleştirilir. Burada her bir panelde bir bağlı ve iki kaçma girdabı oluşturulur. Bu kaçma girdapları yüzeyi takip edip kanadı firar kenarından serbest akım doğrultusunda terk eder. Oluşturulan paneller üzerinde girdap köşe noktaları (G) olarak tanımlanır. G noktaları yüzey üzerinde bir matris oluşturur. Ayrıca firar kenarını terk eden kaçma girdapları istenilen sayıda parçalara ayrıldıktan sonra matrisin devamına eklenir. Y x Şekil 3.4: Girdap köşe noktalarının gösterimi 17
48 İz Bölgesinin Elde Edilmesi Paneller üzerinde girdap köşe noktalarının tanımlanmasının ardından iz bölgesi oluşturulur. İz bölgesi doğrusal girdap kafes yöntemi için tek bir doğrusal girdap ile ifade edilebileceği gibi girdap parçaları halinde de ifade edilebilir. İz bölgesinin girdap parçaları halinde tanımlanmasının amacı, doğrusal olmayan girdap kafes yöntemine geçildiği zaman aynı iz bölgesi üzerinde çalışmaya devam edebilmektir. İz bölgesi girdaplarının sonsuzda birleştiği kabulü yapılır. Sonsuz ifadesini kafes yönteminde kullanmak için iz bölgesinin uzunluğunu tanımlayan (Lwake) parametresi tanımlanır. Bu parametre kanat açıklığının bir katsayı ile çarpımı (Lwake = b Lk) şeklinde ifade edilirse iz bölgesinin kanattan yeterince uzakta olması gerekmektedir. Daha önce yapılan çalışmalar göstermektedir ki iz bölgesi uzunluğunun, açıklığın 10 katı seçilmesi yeterli bir parametredir. Bu çalışmada Lk = 10 seçilmiştir ve bunun üzerinden işlemler yapılmıştır. Lwake = b Lk İz bölgesi uzunluğu (4) Şekil 3.5: İz bölgesi girdap gösterimi 18
49 Şekil 3.5, 10 birim açıklık ve 1 birim vetere sahip dikdörtgensel üst görünümlü kanatta 10 o hücum açısı için firar kenarından ayrılan iz bölgesinde girdap yönelimini ve iz bölgesi uzunluğunu göstermektedir. İz bölgesinin uzunluğunun tanımlanmasını ardından, iz bölgesinin kaç girdap parçasından oluşacağı (NW) parametresi ile tanımlanır. NW parametresi doğrusal girdap kafes yönteminde 1 seçilmiştir fakat bu parametre daha sonra iz bölgesinin düzenlenmesi adımında doğrusal olmayan girdap kafes yönteminde kullanılacaktır. Şekil 3.6 da firar kenarından ayrılan kaçma girdaplarının 10 o hücum açısına sahip serbest akım doğrultusunda 10 parçaya ayrılarak elde edilen girdap parçaları köşe noktaları gösterilmiştir. Kanat açıklığı ve iz bölgesi arasında bulunan bu mesafe farkından dolayı kanat sanki bir çizgi görünümünde kalmaktadır. Şekil 3.6: İz bölgesi girdap köşe noktalarının gösterimi Girdap Kafes Yöntemi Kontrol Noktalarının Seçilmesi Çeyrek veter noktasına yerleştirilen bağlı girdaplar ve her bir bağlı girdabın devamında uzanan girdap parçaları bir atnalı girdabını oluşturur. Her bir atnalı girdabı yüzey üzerinde hız indükler. Viskozitesiz, irrotasyonel ve sürekli sıkıştırılamaz bir akım için yüzeyde oluşan dik hız bileşeni (n s ) sıfır olmalıdır ve yüzeyden ayrılan serbest girdap çizgilerinde (free vortex wake) ani basınç değişimleri olmamalıdır (Rom, 1992). C pw = 0 2 φ = 0 Laplace Denklemi (5) n s + V. n s = 0 n w + V. n w = 0 n s : normal vektörü (s, surface ifadesi için alt indis) 0 r n w : normal vektörü (w, wake ifadesi için alt indis) 19

. Sınır koşulunu uygulamak için seçilen nokta kontrol noktası olarak adlandırılır ve (C) ile ifade edilir.")
50 Şekil 3.7: Panel normal vektörleri gösterimi Yüzey dik bileşeni sıfır olma sınır şartını uygularken aynı zamanda Kutta şartı tüm keskin kenarlarda sağlanmalıdır. Bunun sebebi kenarlarda ani basınç değişimlerinin olmamasını sağlamaktır. Yapılan incelemeler sonucunda yüzeye dik hız bileşenin sıfır olması sınır koşulunun üççeyrek veter noktasında uygulanması halinde Kutta şartının kendiliğinden sağlandığı görülmüştür (Houghton ve Carpenter, 2003). Sınır koşulunu uygulamak için seçilen nokta kontrol noktası olarak adlandırılır ve (C) ile ifade edilir. Her bir panelin x yönünde üççeyrek ve y yönünde bağlı girdap köşe noktalarının ortası şeklinde seçilir. Şekil 3.8 dikdörtgensel üst görünümlü kanat için kontrol noktalarının dağılımını göstermektedir. Şekil 3.8: Kontrol noktası gösterimi C i,j = 0.5 (P i,j + P i,j+1 ) [0.5 (P i+1,j + P i+1,j+1 ) 0.5 (P i,j + P i,j+1 )] 20
, girdap köşe noktaları (G) ve panel kontrol noktaları (C) oluşturulur.")
51 Girdap Kafes Yöntemi Matematiksel Modelleme Ana program yapısına uygun olarak geometrinin elde edilmesinin ardından çözüm ağı oluşturmak gerekmektedir. İlk olarak daha önce belirtildiği gibi panel köşe noktaları (P), girdap köşe noktaları (G) ve panel kontrol noktaları (C) oluşturulur. Ağ yapısının kurgulanmasının ardından girdap şiddetlerinin elde edilmesi aşamasında serbest akımın ve tüm atnalı girdaplarının kontrol noktasında indükledikleri toplam hızların yüzeye dik bileşenleri sıfır olmalıdır. Her bir kontrol noktası için sınır koşulu uygulandığında bir denklem takımı elde edilir. Bu denklem takımının çözümlenmesi ile girdap şiddetleri edilir [15]. Denklem (6) da girdap şiddeti (Γ),yüzey dik vektörü (ζ ) ve denklem takımı (A) ile ifade edilmiştir. Veter doğrultusundaki paneller (i), açıklık doğrusundaki paneller (j) indisleri ile atnalı girdabı (G) ve kontrol noktası (C) alt indisleri ile ifade edilmiştir. NI NJ j G =1 i G =1 A (ic,j C) (i G,j G )Γ (ig,j G ) = V. ζ (ic,j C ) Genel denklem Sistemi (6) Şekil 3.9: Ağ yapısı atnalı girdap yerleşimi [15] Burada (A (ic,j C )(i G,j G )) büyüklüğü (i G, j G ) indisli atnalı girdabının (i C, j C ) indisli kontrol noktasında birim girdap şiddeti başına indüklediği hızın normal bileşenini ifade etmektedir. Bir atnalı girdabının indüklediği hız birim girdap şiddeti başına indüklediği hız (v) ile girdap şiddetinin 21
52 çarpımı ile elde edilir. Denklem (6) ve (7) düzenlendiği zaman birim girdap şiddeti başına oluşturulan denklem takımı elde edilir. V (ic,j C )(i G,j G ) = v (ic,j C )(i G,j G )Γ (ig,j G ) Atnalı girdabı hız indüklemesi (7) A (ic,j C) (i G,j G ) = v (ic,j C )(i G,j G )ζ (ic,j C ) Denklem takımı (8) ζ i = (R 1 R 2 ) R 1 R 2 Yüzey dik vektörü (9) R 1 = (P i+1,j+1 P i,j ) R 2 = (P i,j+1 P i+1,j ) Denklem takımının elde edilmesinde birim girdap şiddeti başına bir atnalı girdabının indüklediği hızı bulmak için Biot-Savart yasası kullanılır. Biot-Savart yasası bir elektrik alan tarafından üretilen manyetik alanı ifade eden bir denklem sistemidir. Akımın şiddetine bağlı olarak oluşan manyetik alan kuvvetinin belirlenmesinde kullanılır (Houghton ve Carpenter, 2003). Şekil 3.10: Biot-Savart yasası [16] Biot-Savart yasasından yararlanarak bir girdabın uzayda bir noktada indüklediği hızı bulmak için denklemde elektrik akım şiddeti ve girdap parçası sirkülasyon şiddeti arasında benzerlik kurulur. 22
53 Şekil 3.11: Biot-Savart yasası girdap uygulaması [15] Şekil 3.11 ile ifade edilen doğrusal girdaplar için Biot-Savar yasasının uygulanması denklem (10) da gösterilmiştir (Katz, Plotkin 1991). v = Γ 4πh (cosβ + cosα) (10) Kafes girdap yönteminde bir atnalı girdabı oluşturmak için bir bağlı girdap ve birden fazla kaçma girdabı sistemi kullanılmıştır. Bu sistemde girdaplar, girdap parçalarına ayrılmıştır ve Biot-Savart yasası kullanılarak her bir girdap parçasının uzayda indüklediği diferansiyel hızı ( V ) veren ifade denklem (11) de gösterilmiştir (Katz, Plotkin 1991). Şekil 3.12: Bir doğrusal girdap parçasının indüklemesi [15] V = Γ (r 1 r 2 ) r 4π r 1 r 2 0. ( r 1 r 2 ) Biot-Savart Yasası (11) r 1 r 2 r 0 = (P 2 P 1 ) r 1 = (P P 1 ) r 2 = (P P 2 ) 23
54 Uzayda indüklenen diferansiyel hız vektörü ( V ) x-yönüne (u), y-yönüde (v) ve z- yönünde (w) hızlarını içerir. İndüklenen hızları bulma aşamasında ok açısı ve sivrilme oranı gibi parametrelerden kaynaklı olarak kontrol noktaları başka bir girdap parçası üzerinde denk gelebilir. Şekil 3.12 de ifade edilen parametrelerden P noktası girdap çizgisi üzerinde ise tekillik ile karşılaşılır. Tekillik girdap merkezinde indüklenen hızın sonsuz olmasıdır. Denklem (11) ile hız indüklemeleri hesaplanırken kontrol noktalarının tekillik oluşturmaması için ek tanımlamalar gerekmektedir. Kontrol noktası ve girdap köşe noktaları arasındaki mesafe epsilon (ε) ile ifade edilir. Bu durumda kontrol noktaları girdap üzerinde ya da çok yakın ise indüklenen hız sıfır 0 kabul edilir. Girdap kafes yöntemi çalışma kapsamında epsilon (ε) değeri olarak seçilmiştir. r 1 < ε, r 2 < ε, r 1 r 2 < ε u = v = w = 0 Doğrusal girdap kafes yönteminde denklem takımının elde edilmesi için Biot-Savart yasası kullanılarak her bir kontrol noktasında birim girdap şiddeti başına her bir atnalının indüklediği hız hesaplanır. Kafes yönteminde atnalı girdabı bir bağlı ve iki kaçma girdabı şeklinde paneller üzerine yerleştirilir. Panel çeyrek veter noktalarına yerleştirilen bağlı girdabın taşıma üretebilmesi için serbest akım yönüne bağlı olarak kanat üst yüzeyinde akımı hızlandırıcı ve alt yüzeyinde akımı yavaşlatacağı prensibince girdap yönü belirlenir. Atnalı girdabı bir kapalı döngü içerisinde devam ettiği için bağlı girdabın yönüne bağlı olarak atnalının sol kolu saat ibreleri yönünde ve sağ kolu saat ibreleri tersine yönelim göstermektedir. Taşıyıcı kanat için bir atnalı girdabını modellenmesi Şekil 3.13 te gösterilmiştir (Katz, Plotkin 1991). Şekil 3.13: Atnalı modeli [8] 24
 atnalı girdabının indüklediği hızın hesaplanmasını göstermektedir.")
55 Atnalı girdabının sol kolu (L), sağ kolu (R) ve bağlı girdap (B) ile ifade edilir. Şekil 3.16 panel üzerinde bir atnalı girdabını ve denklem (12) atnalı girdabının indüklediği hızın hesaplanmasını göstermektedir. v (ic,j C )(i G,j G ) vektörü (i G, j G ) atnalı girdabının (i C, j C ) kontrol noktasında birim girdap şiddeti başına indüklediği hızı, v L atnalı girdabının sol kolunun, v R atnalı girdabının sağ kolunun ve v B atnalı girdabının bağlı kısmının indüklemelerini göstermektedir (Yükselen, 2017). Şekil 3.14: Atnalı girdabı gösterimi [15] v (ic,j C )(i G,j G ) = v L + v R + v B Atnalı girdabı indüklemesi (12) Atnalı girdaplarının birim girdap şiddeti başına indüklemelerinin hesaplanması sırasında x yönünde bulunan paneller üzerinde kaçma girdap kolları üst üste gelmektedir. Ayrıca y yönünde ilerleyen panellerde atnalı girdaplarının sol kolları ile sağ kolları çakışmaktadır. Her bir atnalı girdabını kollarında bulunan girdap parçalarının ayrı ayrı hesaplanması yerine bir düzen halinde hesaplanması programın çalışmasını kolaylaştıracak ve tekrarlı hesaplamalardan kaçınılmasına yardımcı olacaktır (Yukselen 2017). Şekil 3.15 x-yönünde sıralanan atnalı girdap kollarını çakışmasını göstermektedir. Atnalı girdaplarının toplam indüklemelerinin hesaplanması için bağlı girdapların ve kaçma girdaplarının toplam indüklemelerinin ayrı hesaplanması gerekmektedir. Bu aşamada atnalı girdabını bir kolunun girdap parçalarının toplam indüklemesi v T ifade edilir. 25
![Şekil 3.15: Atnalı girdapları çakışması [15] v (ic,j C )(i G,i G ) = v T (i C,j C )(i G,j G ) + v B (i C,j C )(i G,j G ) + v T (i C,j C )(i G,j G +1) (13) (i G = 1,2,. NI) (j G = 1,2,.](/docs-images/91/105068105/images/56-0.jpg "NJ) Yükselen (2017) girdap parçalarının toplam indüklemelerini hesaplamak için v T ifadesini, jg indisli kenar üzerinde (ig, jg) noktasından başlayan kaçma girdabının (ic, jc) kontrol noktasında")
56 Şekil 3.15: Atnalı girdapları çakışması [15] v (ic,j C )(i G,i G ) = v T (i C,j C )(i G,j G ) + v B (i C,j C )(i G,j G ) + v T (i C,j C )(i G,j G +1) (13) (i G = 1,2,. NI) (j G = 1,2,. NJ) Yükselen (2017) girdap parçalarının toplam indüklemelerini hesaplamak için v T ifadesini, jg indisli kenar üzerinde (ig, jg) noktasından başlayan kaçma girdabının (ic, jc) kontrol noktasında birim girdap şiddeti başına parçalara ayırmış ve bunların toplanması şeklinde düzenlemiştir. Denklem (14) girdap parçalarının toplanmasını ve Şekil 3.16 girdap parçalarının düzenini göstermektedir. v T NI+NW+1 (i C,j C )(i G,i G ) = k=i ( v T G (i C,j C )(k,i G )) (14) (i G = 1,2,. NI + NW + 1) (j G = 1,2,. NJ + 1) 26
![Şekil 3.16: Girdap parçaları düzeni [15] 3.1.7. Doğrusal Girdap Kafes Yöntemi Çözümlemesi Geometri ve panel parametrelerinin tanımlanmasının ardından denklem takımı elde edilir.](/docs-images/91/105068105/images/57-0.jpg "Girdap şiddetlerinin elde edilmesi için gerekli katsayılar matrisinin oluşturulması gerekmektedir.")
57 Şekil 3.16: Girdap parçaları düzeni [15] Doğrusal Girdap Kafes Yöntemi Çözümlemesi Geometri ve panel parametrelerinin tanımlanmasının ardından denklem takımı elde edilir. Girdap şiddetlerinin elde edilmesi için gerekli katsayılar matrisinin oluşturulması gerekmektedir. Denklem (8) de yer alan katsayılar matrisi (A) yeniden düzenlendiğinde denklem (15) de verilen matris formu elde edilir (Katz, Plotkin 1991). 27
58 Katsayılar matrisinin boyutu x-yönünde ve y-yönünde bulunan panel sayılarının çarpımı olacaktır. Denklem (16) da RHS vektörü serbest akım vektörü ile kontrol panelinin yüzey dik vektörünün sayısal (scalar) çarpılması ile elde edilen ifadeyi göstermektedir. Katsayılar matrisi (A) ve (RHS) matrisinin oluşturulmasının ardında denklem takımı çözülür ve girdap şiddetleri Gamma (Γ) elde edilir. Denklem (15) ile ifade edilen şekilde çözümlemenin yapılması ile elde edilen girdap şiddetleri (1, NIxNJ) boyutlarına sahip bir vektör olacaktır. Girdap kafes yönteminde kontrol noktaları bir matris şeklinde kurgulanacağı ifade edilmişti. Çözümlemenin ardından elde edilen girdap şiddetleri bu matris yapısına uygun hale getirilir. Şekil 3.17 NI = 2 ve NJ = 5 alınarak elde edilecek bir çözümleme için girdap şiddetlerinin düzenlenmesini göstermektedir. Şekil 3.17: Girdapların yeniden düzenlenmesi Doğrusal Girdap Kafes Yöntemi Aerodinamik Katsayıların Hesaplanması Aerodinamik katsayıların hesaplanması aşamasında denklem takımının çözümlenmesi ile elde edilen girdap şiddetleri ve panel özellikleri kullanılır. Uzayda bir girdap üzerine akış gelmesi durumunda akışın yönüne ve girdabın yönüne bağlı olarak yüzeyler arasında bir basınç farkı oluşacaktır. Houghton ve Carpenter (2003) girdap yönüne bağlı olarak oluşacak basınç farkını Şekil 3.18 de gösterildiği gibi ifade etmiştir. Kutta-Joukowski teoremi gereğince sonlu bir kanat için birim açıklık başına oluşan taşıma kuvveti (l),akışkanın yoğunluğu (ρ), hızı (V) ve girdap şiddetinin (Γ) çarpımı şeklinde ifade edilir ve denklem (17) ile gösterilir (Houghton ve Carpenter, 2003). 28
59 Şekil 3.18: Dikey basınç bileşeni gösterimi [3] l = ρ V Γ Kutta-Joukowski Teoremi (17) Girdap kafes yöntemi çalışmasında birim açıklık başına taşıma kuvveti hesabı yapıldıktan sonra sürükleme hesabı yapmak için dikey hız indüklemelerinin de hesaplanması gerekmektedir. İki farklı hız indüklemesinin hesaplamak yerine denklem (17) yeniden düzenleyerek sonlu kanat üzerinde bir kuvvet (F) hesaplamak mümkündür. Kuvvetin serbest akım doğrultusu yönünde oluşturduğu bileşen sürükleme (D) ve serbest akım doğrultusuna dik yönde oluşturduğu bileşen taşıma (L) olacaktır. Denklem (18) Kutta-Joukowski teoreminden yola çıkarak elde edilen kuvvet denklemini göstermektedir ve Şekil 3.19 ile görsel olarak ifade edilmiştir. Şekil 3.19: Aerodinamik kuvvetler gösterimi 29
60 Denklemlerde gözüken "V " parametresi 1 seçilmiştir. Serbest akış hız parametresi girdap şiddetleri bulma aşamasında (RHS) vektöründe kullanılıyor olup etkisi hız indüklemelerinde ve diğer kuvvet hesaplarında ortaya çıkacaktır. Programdan daha hızlı cevap almak için bu parametre 1 olarak sabitlenmiş ve girdiler arasından çıkarılmıştır. Aerodinamik katsayıların hesaplanması sırasında elde edilecek kuvvetin dinamik basınç ile birimsizleştirilmesinin ardından denklemler "V " dan bağımsız hale gelecektir. F = ρ V Γ. ds (V = V + V i ) Aerodinamik kuvvet hesabı (18) ( s = G i,j+1 G i,j ) F 0.5 ρ V 2 S = ρ V Γ. s 0.5 ρ V 2 S CF = 2 V i,j Γ S V i,j. s Cdi = CF. ed Cl = CF. el ed = V. [cos(a), 0, sin(a)] el = V. [ sin(a), 0, cos(a)] Doğrusal Girdap Kafes Yöntemi Sonuçlar ve Karşılaştırmalar Doğrusal girdap kafes yöntemi akış diyagramı Şekil 3.1 de ifade edilmiştir. Gerekli giriş parametrelerinin tanımlanmasının ardından sırasıyla panel hesaplamaları, denklem takımı oluşturulması, girdap şiddetlerinin elde edilmesi ve aerodinamik katsayıların hesabı gelmektedir. Bu adımlar kullanılarak MATLAB programı üzerinde bir yazılım geliştirilmiştir. Giriş parametrelerine ve tercihlere bağlı olarak doğrusal ya da doğrusal olmayan girdap kafes yöntemi ile birden fazla taşıyıcı yüzey ile işlem yapması düşünülerek geliştirilen yazılıma ULU-Multivortex adı verilmiştir. Şekil 3.20 doğrusal girdap kafes yöntemi için geliştirilen yazılımın çalışma mantığını ve adımları ayrıntılı göstermektedir. Bu adımlar arasında NW parametresi 1 olarak sabitlenmiş ve G noktaları bunun üzerinden hesaplanmıştır. 30
 tarafından geliştirilen Prandtl taşıyıcı çizgi teoremi alt tabanlı MAYwing Prandtl s Lifting Line Model for 3D Low-Speed Wings")
61 Şekil 3.20: Doğrusal girdap kafes yöntemi bilgisayar programı çalışma prensibi Girdap kafes yönteminin oluşturulmasının ardından dikdörtgensel üst görünümlü bir kanat için sonuçlar elde edilmiştir. Öncelikle veter yönünde panel sayısı bir seçilerek Yükselen (2017) tarafından geliştirilen Prandtl taşıyıcı çizgi teoremi alt tabanlı MAYwing Prandtl s Lifting Line Model for 3D Low-Speed Wings programı ile belirli hücum açıları için sonuçlar karşılaştırılmıştır. 31

62 Şekil 3.21: Geliştirilen programdan alınan görüntü (10 o hücum açısı) Şekil 3.22: MAYwing (10 o hücum açısı) 32
63 Giriş parametreleri ULU-MultiVortex MAYwing NI 1 - NJ AR c 1 1 Λ 0 o - λ 1 1 γ 0 o - Tablo 3.2: MAYwing ve ULU-Multivortex program giriş parametreleri ULU-MultiVortex MAYwing Alfa (α) ( o ) Cl Cdi Cl Cdi Cl-Fark Cdi-Fark E E-05 Tablo 3.3: MAYwing ve ULU-Multivortex sonuçların karşılaştırılması Doğrusal girdap kafes yöntemi ile taşıyıcı çizgi teoremi arasında karşılaştırma yapmak için ULU-Multivortex programında NI parametresi 1 seçilmiştir. Tablo 3.2 ve Tablo 3.3 de yer alan (-) sembolü taşıyıcı çizgi teoreminden kaynaklı MAYwing programında bu parametrelerin girilmeyeceğini ifade eder. Tablo 3.3 incelendiği zaman 10 açıklık oranına sahip bir kanat için elde edilen aerodinamik katsayılar arasındaki farkın 0.01 mertebelerinde olduğu gözlemlenmiştir. Girdap kafes ve taşıyıcı çizgi teorisinin NI = 1 için benzer aerodinamik katsayılar verdiği sonucuna ulaşılabilir. Aynı kanat üzerinde ULU-Multivortex programında NI = 3 ve NJ = 15 seçilerek yeniden alınan çözümlemede 10 o hücum açısında taşıma katsayısı (Cl = ) elde edilmiştir. Tablo 3.3 deki değerler ile karşılaştırma yapıldığında farkın arttığı gözlemlenmektedir. Veter yönünde taşımanın da modellenmesinden kaynaklı farkın artması beklenen bir durumdur. Bu aşamada program sadece PLL teorisi ile karşılaştırılıp doğru çözüm alıp almadığı ve iki teori arasındaki farklar test edilmiştir. Karşılaştırmaların ardından ULU-Multivortex programına ok açısı, dihedral açısı ve sivrilme oranı eklenerek analiz yapılmıştır. Tablo 3.4 girilen parametreleri ve Şekil 3.23 programdan alınan geometrileri göstermektedir. 33

64 ULU-MultiVortex NI 5 NJ 40 AR 8 c 0.75 Λ 10 λ 0.5 γ 10 α 10 Tablo 3.4: ULU-MultiVortex giriş parametreleri Şekil 3.23: Giriş parametrelerine göre elde edilen yapı Şekil 3.24: Program ara yüzünden alınan girdi parametreleri ve aerodinamik katsayılar 34
65 3.2. Doğrusal Olmayan Girdap Kafes Yöntemi (DOGKY) Doğrusal girdap kafes yönteminde firar kenarından ayrılan atnalı girdapları serbest akım doğrultusunda yüzeyi terk etmektedir. Doğrusal olmayan girdap kafes yönteminde firar kenarından ayrılan girdapların tekrarlı olarak yeni konumları hesaplanır ve hesaplanan yeni konumlar kullanılarak yeniden girdap şiddetleri ve aerodinamik katsayılar hesaplanır. DGKY de iz bölgesi girdapları sabit bir girdap çizgisi oluşturmakta iken DOGKY ile kanat ucu girdaplarının sarmal hareket yapmasını gözlemlemek mümkün olacaktır. DOGKY çalışma mantığı olarak daha önce kurgulanan DGKY üzerinde firar kenarını terk eden girdap köşe noktalarının yeniden hesaplanması ilave edilerek aynı kurgu üzerinden ilerleyecektir ve ULU-Multivortex yazılımı yeniden düzenlenecektir. Şekil 3.25 de Rom, Zorea ve Gordon tarafından 1974 yılında doğrusal olmayan girdap kafes yöntemi için oluşturulan akış diyagramı verilmiştir (Rom, 1992). Bu çalışmada kalınlığı olmayan (flat plate) kanatlar inceleneceği için referans alınan akış diyagramında gerekli değişiklikler yapılmıştır. Akış diyagramı üzerinde kalınlığın etkisini incelemek için verilen kaynak dağılımları ve bunların tekrarlı incelenmesi kısımları çıkarılmıştır. Şekil 3.25: Doğrusal olmayan girdap kafes yöntemi akış diyagramı [12] 35
66 İz Bölgesinin Yeniden Düzenlenmesi Firar kenarı terk eden girdapların oluşturduğu iz bölgesini tahmin etmek için Katz ve Plotkin, öngörülmüş iz şekli, İz gevşetme ve Zaman-adımı yöntemlerinin kullanımından bahsetmişlerdir (Katz ve Plotkin, 1991). İz bölgesinin yeniden düzenlenmesi için zaman adımı metodu firar kenarını terk eden girdap parçalarının her seferinde girdap köşe noktalarında indüklenen hızlardan kaynaklı aslında olması gereken konumunun değişmesini ve yapay zaman parametresi kullanarak girdap parçasının ilerleyerek yeni formunu almasını ifade etmektedir. İz bölgesinin yeni formunun elde edilmesi için zaman adımı metodu kullanılmıştır. İz bölgesinin yeniden düzenlemesini 6 adıma ayırarak incelemek metodun kolaylaştırılması için daha uygundur. Bu adımlar sırasıyla, serbest iz bölgesinin tanımlanması, yapay zaman parametresinin hesaplanması, indüklenen hızların hesaplanması, girdap köşe noktasının hareket ettirilmesi, geride kalan iz bölgesinin düzenlenmesi ve yöntemin tekrarlanması şeklindedir. 1- Serbest iz bölgesinin tanımlanması: Doğrusal olmayan girdap kafes yöntemi çalışmasında iz bölgesi oluşturulması adımında firar kenarını terk eden girdaplarının girdap parçaları şeklinde tasarlanması ifade edilmiştir. Bu aşamada doğrusal girdap kafes yönteminde sabitlenen (NW) parametresi girdiler arasına eklenmelidir. Ardından DGKY de belirtildiği şekilde iz bölgesi girdap noktaları elde edilmelidir. İz bölgesi girdap noktaları elde edilirken firar kenarına yakın girdap parçalarının uzunluklarının daha kısa, firar kenarından uzaklaştıkça daha uzun seçilmesi firar kenarında daha hassas çözüm için yardımcı olacaktır. Bu çalışmada iz bölgesi girdap parçaları matematiksel modelin daha kolay kurgulanması için eşit seçilmiştir. Şekil 3.26: Serbest iz bölgesi tanımlanması G i+1,j = G i,j + dr. (Lwake/NW) (i: NI + 1, NI + 2, (NI + NW + 1)) 36
67 2- Yapay zaman parametresinin hesaplanması: Yapay zaman parametresi ( t) girdap parçaları aralarında geçen süreyi ifade etmektedir. Her bir girdap parçasının uzunluğuna ve serbest akışa bağlı olan bu parametre denklem (19) ile gösterilmiştir. t K ( lwake V ) (19) Katz ve Plotkin (1991), denklem (19) da yer alan K parametresinin 0.5 ile 5 arasında değerler alabileceğini belirtilmektedir. Çalışma boyunca bu parametre 1 olarak tercih edilmiştir. Ayrıca "lwake" parametresi girdap parçasının uzunluğunu ifade etmektedir ve her iterasyon sonucunda değişen bir değere sahiptir. Bu parametre ele alınan girdap parçası için köşe noktaları arasındaki farkın X ekseni üzerinde iz düşümü şeklinde düşünülmüştür ve denklem (19) yeniden düzenlenerek ULU-Multivortex yazılımı üzerine denklem (20) de gösterildiği şekilde ilave edilmiştir. t (i,j) K ( G (i+1,j) G (i,j) x bileşeni V ) Yapay zaman parametresi (20) (i: NI + 1, NI + 2, (NI + NW + 1)) (j: 1,2, (NJ + 1)) 3- İndüklenen hızların hesaplanması: Girdap serbest iz bölgesinin ve zaman adımının tanımlanmasının ardından denklem (7) ile ifade edilen atnalı girdabı hız indüklemesi formülü kullanılarak iz bölgesinde yer alan girdap köşe noktaları için indüklenen hızlar hesaplanır. Denklem (7) de ifade edilen alt indislerden kontrol noktalarının girdap köşe noktaları seçilmesi indüklenen hızların hesaplanması için yeterlidir. V ind (i,j) = [u (i,j), v (i,j), w (i,j) ] Şekil 3.27: Kontrol noktasında indüklenen hız 37
68 4- Girdap köşe noktasının hareket ettirilmesi: Yöntemin uygulanması aşamasında, kontrol noktasında indüklenen hızlara serbest akış parametresi eklenerek girdap parçasında toplam hız tespit edilir. Daha önceden mesafeye ve serbest akışa bağlı tanımlanan yapay zaman adımı ile toplam hız çarpıldığında bir sonraki kontrol noktası yani girdap parçasının bir köşe noktası tespit edilmiş olur. Şekil 3.28: Yeni girdap köşe noktasının hesaplanması G (i+1,j) = G (i,j) + [V + V ind (i,j) ] t (i,j) V = V [cos(a), 0, sin (a)] 5- Geride kalan iz bölgesinin düzenlenmesi: Adım 4 te açıklandığı şekilde bir sonraki girdap noktası tahmin edildikten sonra bu hesaplama açıklık boyunca tüm girdaplar için tekrarlanır. Bu sayede tüm (j) alt indisleri için G (i+1,j) noktaları hesaplanmış olur. Ardından aynı işlemi bir sonraki adımda yapmadan önce geride kalan iz bölgesi yeni hesaplanan G (i+1,j) noktasına göre denklem (21) de gösterildiği şekilde yeniden düzenlenir. Şekil 3.29 iz bölgesinde 50 girdap parçası (NW = 50) alındığında 5. girdap parçasından sonra iz bölgesinin yeniden düzenlenmesi ile geride kalan iz bölgesinin nasıl şekilleneceğini göstermektedir. 38

69 Şekil 3.29: Geride kalan iz bölgesinin yeniden düzenlenmesi 6- Yöntemin tekrarlanması: Sırasıyla tüm adımlar yapıldıktan sonra ilk elde edilen girdap şiddetlerine göre iz bölgesi şekillenmiş olur. Ardından bir iterasyon eklenerek bu adımlar iz bölgesi için tekrarlanır. İz bölgesinde tekrarlama yapıldıktan sonra elde edilen yeni girdap köşe noktaları kullanılarak yeniden girdap şiddetleri hesaplanır ve yeni hesaplanan girdap şiddetlerine iz bölgesinin yeniden düzenlenmesi adımları tekrarlanır. İz bölgesinin yeniden düzenlenmesi için ULU-Multivortex yazılımına uygun kurgulanması gereken yazılımın mantığı Şekil 3.30 da gösterilmiştir. Şekil 3.30: Yeni girdap köşe noktalarının hesaplanması Doğrusal girdap kafes yönteminin ardından, doğrusal olmayan girdap kafes yöntemi için gerekli aşama tamamlanmış ve daha önce yazılan yazılıma iz bölgesinin yeniden düzenlenmesi kısmı eklenmiştir. 39

70 Doğrusal Olmayan Girdap Kafes Yöntemi (DOGKY) Girdap kafes yöntemlerinin doğrusal ve doğrusal olmayan durumları ve kurgulanması daha önceki bölümlerde açıklanmıştır. Bu aşamada doğrusal olmayan girdap kafes yöntemi için yeniden düzenlenen ULU-Multivortex yazılımının çalışma mantığı ve adımları Şekil 3.31 üzerinde paylaşılmıştır. Şekil 3.31: Doğrusal olmayan ULU-Multivortex yazılımı akış diyagramı 40
71 Doğrusal Olmayan Girdap Kafes Yöntemi Yakınsama Testi Doğrusal olmayan girdap kafes yöntemi çalışmasında geliştirilen yazılım üzerinde iterasyon sayılarının girdi olarak ya da bir kararlılık şartı eklenerek elde edilmesi gerekmektedir. İki farklı adımda yer alan iterasyon sayısının belirlenmesi için kanat ucu girdaplarının birbirleri üzerinde sarmalanma hareketlerinin yakınsamasının yapılması daha önce bu alanda geliştirilen yazılımlarda karşımıza çıkan bir seçenektir. Bu anlamda iz bölgesinin ve tekrarlı girdap şiddetlerinin bulunması için gerekli iteraston sayısı yakınsama testi yapılarak belirlenmiştir. İki farklı iterasyon olması sebebi ile yakınsama testi yapmak için öncelikle tekrarlı girdap şiddetlerini belirleme iterasyonu sabit tutulup iz bölgesinin tekrarlanma iterasyonu başlatılmıştır. Şekil 3.32 dikdörtgensel üst görünümlü bir kanat için b = 10, c = 1, NI = 2, NJ = 50 ve NW = 30 a = 10 o girdilerini kullanarak iz bölgesinde açıklığın 10 katı mesafede girdap sarmalanmaları gösterilmiştir. Burada sınır 5 iterasyon seçilmiştir ve 2. iterasyondan sonra girdap sarmalanma hareketenin yakınsadığı görülmektedir. Şekil 3.32: Kanat ucu girdapları sarmalanması yakınsama 1 41
72 İz bölgesi iterasyonunun yakınsamasının ardından bu değer sabit tutularak aynı geometri için tekrarlı girdap şiddetlerini belirleme iterasyonu için yakınsama testi yapılmıştır. Şekil 3.33: Kanat ucu sarmalanması yakınsama 2 Şekil 3.33 incelendiği zaman kanat ucu girdaplarının 2. tekrardan sonra yakınsadığı görülmektedir. Şekil 3.32 ve Şekil 3.33 beraber düşünüldüğünde programın bundan sonraki adımları için her iki iterasyon sayısı 2 olarak seçilmiş ve işlemler bu iterasyon sayısı üzerinden yapılmıştır. Yakınsama testinde kullanılan geometri için a = 15 o, NJ=60 ve NW=50 olarak değiştirilip seçilen iterasyon sayılarının ardından kanat ucu sarmalanmaları elde edilmiştir. Şekil 3.34: Kanat ucu sarmalanması 42

73 Doğrusal Olmayan Girdap Kafes Sonuçların Karşılaştırılması Geliştirilen yazılım için gerekli tüm parametreler ve girdiler tanımlanmıştır. Yakınsama testinin ardından geliştirilen yazılımın daha önce test edilmiş bir yazılım ile karşılaştırılması gerekmektedir. Karşılaştırmada genel kullanım için yayınlanmış XFLR5 programı kullanılmıştır. Program prensip olarak sonlu kanat için analiz yapmadan önce iki boyutlu kanat analizlerin yapılmasını şart koşmaktadır. İki boyut analiz kısmında panel yöntemleri kullanan XFLR5 programında kanat profili ve Re sayısının girdileri gerekmektedir. Geliştirilen ULU-Multivortex yazılımı viskozitenin etkisini hesaplamalara katmadığı için Re sayısı kullanmamaktadır. İki program arasında karşılaştırma yapmak için XFLR5 programına yüksek Re sayıları girdi olarak girilmiştir. İkinci olarak geliştirilen yazılım düz levha için tasarlanmıştır ve XFLR5 programı üzerinde düz levha ile analizler yapıldığında değişen hücum açılarında yakınsamaların yapılamadığı gözlemlenmiştir. Analizlerin düzgün alınabilmesi için düz levhaya uygun olarak simetrik bir profilin seçilmesinin uygun olacağı görülmüştür. Ek olarak seçilen simetrik profilin kalınlığı aerodinamik katsayılar üzerinde etkili olacağı için ince bir profilin seçilmesi daha doğru karşılaştırma olacaktır. Düşük kalınlıktaki profiller ile analizler yapılmak istendiğinde sonlu kanat analizlerinde sorunlar ile karşılaşılmaktadır. Birkaç farklı kalınlıktaki profilin test edilmesinin ardından düz levhaya uygun bir kanat kesit geometrisi olarak NACA0010 tercih edilmiştir. XFLR5 programından alınan Şekil 3.35 NACA0010 ve düz levhanın görünümünü göstermektedir. Şekil 3.35: NACA0010 ve düz levha gösterimi Profil seçiminin ardından yapılması gereken analiz tipinin ve Re aralığının belirlenmesi gerekmektedir. Şekil 3.36, XFLR5 programı ara yüzünü göstermektedir. Şekil üzerinde seçilen profil, Re sayıları ve hücum açısı aralıkları görülmektedir. Re sayısı ve , profil NACA0010 ve hücum açısı -15 derece ile +15 derece aralığı seçilmiştir. 43

74 Ayrıca program üzerinde sarı dikdörtgen işareti ile gösterilmiş kısım, program başlatıldığında analizde ıraksamalar ile karşılaşıldığında sınır tabaka şartının başlatılmasını ifade etmektedir ve analiz sırasında bu kısım işaretlenmiştir Şekil 3.36: XFLR5 2-D analiz Sonlu kanat analizi yapmak için gerekli adımlar program üzerinde tamamlanmıştır. Sonlu kanat analizleri yapmak için XFLR5 programı üzerinde analiz tipinin belirlenmesi gerekmektedir. Sabit hızda analiz almak için girdiler arasında serbest akış hızının tanımlanması gerekmektedir. Serbest akış hızı belirlenirken iki boyutta analiz yapılan Re aralığına uygun veter uzunluğu ve hız parametresinin seçilmesi gerekmektedir. Seçilen hız ile kanat üzerinde hesaplama başlatıldığında analizleri tamamlanan Re sayısı aralığına denk gelmeyen noktalar için program sonuç vermeyecektir. Doğrusal olmayan girdap kafes yönteminde yakınsama testleri 1 birim veter ve 10 birim açıklığa sahip dikdörtgensel üst görünümlü bir kanat için yapılmıştır. Benzer geometriyi kullanarak karşılaştırma yapmak için 1 m veter ve 10 m açıklık girdileri XFLR5 programında geometrinin oluşturulması için kullanılmıştır. 2 boyut analizlerinin ve Re aralığında yapıldığı göz önüne alınarak serbest akış hızı 20 m/s seçilmiştir. 44

75 Şekil 3.37: XFLR5 3-D analiz Sonlu kanat için programın ara yüzü Şekil 3.37 de gösterilmiştir. Şekil üzerinde analiz tipi ve serbest akış girdisinin ardından atnalı girdap yöntemi seçilmiştir. ULU-Multivortex yazılımı ve XFLR5 programı aynı yöntem ile analiz yapmaktadır. Program üzerinde viskozitenin etkisinin eklenmesi seçenek olarak verilmiştir. ULU-Multivortex yazılımı çalışma prensibi düşünülerek viskozite seçeneği eklenmemiştir. Tablo 3.5 üzerinde her iki program için girdiler ve yöntemler ayrıntılı açıklanmıştır. 45
76 2D Geometri 3D XFLR5 ULU-Multivortex Profil Naca0010 Düz levha Re aralığı Sınır tabaka yaklaşımı Var Yok NI 3 3 NJ NW - 50 AR c 1 1 Λ o 0 0 λ 1 1 γ o 0 0 Yöntem Atnalı girdap Atnalı girdap Viskozite (işaretlenmedi) - Serbest akış hızı 20 m/s 1 Tablo 3.5: XFLR5-ULU Karşılaştırma parametreleri XFLR5 ULU-Multivortex Fark α o Cl Cdi Cl Cdi Cl Cdi E E Tablo 3.6: XFLR5-ULU Karşılaştırma sonuçları Tablolarda dikkat edilmesi gereken incelemelerden bir tanesi her iki program zıt işaretli benzer hücum açılarında taşıma katsayısı için negatif hücum açısında negatif, pozitif hücum açısında pozitif olacak şekilde aynı büyüklükte sonuçlar vermektedir. Bu sonuç simetrik profiller ve düz levha için beklenen bir durumdur. Programlar karşılaştırıldığı zaman aynı panel parametrelerindeki sonuçlar birbirine çok yakındır. Programlar arasındaki farklar 0.01 mertebelerindedir. XFLR5 programının profil kalınlığını hesaplamalara kattığı düşünüldüğünde bu mertebede bir hatanın ortaya çıkması beklenmektedir. Benzer şekilde artan hücum açısına bağlı olarak aerodinamik katsayılar arasındaki farklar artmaktadır. Burada XFLR5 programı ve ULU- Multivortex yazılımının firar kenarı girdaplarını modelleme yöntemlerinin farklı olduğu göz önüne alınır ise yüksek hücum açılarında farkların ortaya çıkması da beklenmektedir. 46

77 Şekil 3.38: XFLR5 ve ULU-Multivortex panel gösterimi 47
78 Şekil 3.39: ULU-Multivortex girdap dolanması gösterimi (α=15 o ) 48
79 Şekil 3.40: XFLR5 ve ULU-Multivortex girdap gösterimi (Not: XFLR5 programı normal analizlerinde açıklık boyunca kosinüs dağılımı kullanmaktadır, benzer parametreler girildiğinde kanat ucu girdaplarının modellenesinde iz bölgesi mesafe farkından kaynaklı görsel farklılık görülebilmektedir.) 49
80 Cdi Cl Şekil 3.40 karşılaştırma için Tablo 3.5 te verilen geometri parametreleri ile 15 o hücum açısında iki program için girdap gösterimini ifade etmektedir. Şekil 3.41 ve Şekil 3.42 ise aynı kanat için aerodinamik katsayıların grafik üzerinde karşılaştırılmasını göstermektedir. (Alfa=hücum açısı) CL-alfa XFLR5 ULU-Multivortex Alfa ( o ) Şekil 3.41: Cl-Alfa grafik karşılaştırması Cdi-alfa XFLR5 ULU-Multivortex Alfa Şekil 3.42: Cdi-Alfa grafik karşılaştırması 50

81 Dikdörtgensel üst görünümlü bir geometrinin karşılaştırılmasının ardından daha karışık bir geometri ile karşılaştırma yapmak için Tablo 3.5 te kullanılan parametreler yeniden düzenlenmiştir. 2D Geometri 3D XFLR5 ULU-Multivortex Profil Naca0010 Düz levha Re aralığı Sınır tabaka yaklaşımı Var Yok NI 3 3 NJ NW - 50 AR 6 6 c Λ o λ 0 0 γ o Yöntem Atnalı girdap Atnalı girdap Viskozite (işaretlenmedi) - Serbest akış hızı 20 m/s 1 Tablo 3.7: Karışık geometri karşılaştırma parametreleri Şekil 3.43: Karışık geometri karşılaştırması Tablo 3.7 kullanılarak elde edilen geometrinin ardında Şekil 3.43 her iki programdan alınan girdi parametrelerini ve aerodinamik sonuçları göstermektedir. XFLR5 programında yer alan MAC ortalama aerodinamik veteri ifade etmektedir. Girdi parametreleri arasında yer alan (c ) parametresi ise ortalama geometrik veteri ifade etmektedir. Ayrıca programda yer alan kök-uç ok açısı 12 o olarak görülmektedir. ULU-Multivortex yazılımı ok açısı için hücum kenarı ile y- 51

82 ekseni arasını referans alırken XFLR5 programına ok açısı, uç veterin ötelenme parametresi ile girilmektedir. 15 o için öteleme işlemi yapıldığında program 12 o kök-uç ok açısı ifadesini vermektedir. Bu ifade kanat kök çeyrek veter ve uç çeyrek veter arasındaki çizginin y-ekseni ile yaptığı açıdır. Aynı geometrinin elde edilmesinin ardından benzer panel özellikleri ile 10 o hücum açısında alınan aerodinamik sonuçlar: Cl=0.732 (XFLR5) Cdi=0.028 (XFLR5) Cl=0.731 (ULU-Multivortex) Cdi=0.026 (ULU-Multivortex) Cl Fark= Cdi Fark= Taşıma katsayısı ve indüklenmiş sürükleme katsayısı için karışık geometri ile her iki programın benzer sonuçlar verdiği görülmektedir. Şekil 3.44: Karışık geometri gösterimi XFLR5 programı kullanılarak farklı geometriler ile elde edilen sonuçlar ULU-Multivortex yazılımı ile karşılaştırılmıştır. Doğrusal ve doğrusal olmayan girdap kafes yöntemi için geliştirilen yazılımın daha önce kabul görmüş bir yazılım ile benzer sonuçlar verdiği ve viskozitesiz bir akış incelemesi yapılmak istendiğinde ULU-Multivortex yazılımının tutarlı sonuçlar vereceği yorumuna ulaşılabilmektedir. 52
83 4. KANARD-KANAT ETKİLEŞİMİ Bitirme çalışması kapsamında ULU-Multivortex yazılımı geliştirilmiştir. Bu yazılım -15 derece ve +20 derece arasında viskozitesiz bir akış için girdap yönelimlerini ve etkilerini incelemek için ilk aşamada hızlı ve aktif kullanılabilir bir çalışmadır. Limitler kesin olmamakla beraber bir limit olmasının sebebi yüksek hücum açılarında viskoziteye bağlı olarak taşıma kaybından stall kaynaklı bölgenin incelenemiyor olmasıdır. Ayrıca yazılım üzerinde, girdap parçaları firar kenarından itibaren serbest bırakılmaktadır. Rom (1992) taşıyıcı yüzey üzerinde girdapların birbiri üzerine dolanmaya başlayacağı konumu hesaplamak için geometriye bağlı denklem (21) de verilen bağıntıyı ifade etmiştir. e/c = K(AR/C L )(b/c) Firar kenarı girdap mesafesi (21) Denklem (21) de gösterilen K değeri açıklık boyunca eliptik bir yük dağılımı için 0.28 olarak hesaplanmıştır (Kaden, 1931). Denklemde yer alan (e) ifadesi girdabın dolanmaya başlayacağı konumu göstermektedir. Denklem (21) üzerinde AR, açıklık ve veter uzunlukları görülmektedir. Basit bir inceleme yapıldığı zaman delta bir kanat için düşük açıklık oranlarında girdabın 1 veter uzunluğundan daha önce dolanmaya başlayacağına ulaşılabilmektedir. Bu anlamda geliştirilen ULU-Multivortex yazılımı firar kenarından sonra girdap dolanmalarını başlatmaktadır ve açıklık oranının çok küçük (AR< 2) olduğu durumlar için bir hata payı olacaktır. Bu hata payını azaltmak için verilen parametreler arasında G ile tanımlanan girdap köşe noktaları için ek bir düzenleme yapılmıştır. Bu düzenleme ile panellerin oluşturulması adımında veter boyunca ilk sırada bulunan atnalı girdapları hücum kenarından serbest bırakılmıştır. Kanat-ön kanat etkileşimini incelemek için firar kenarından çıkan girdapların düşük açıklık oranlarında veterden ayrıldıktan sonra kısa bir mesafede dolanmaya başladığı düşünüldüğünde bu çalışma için hücum ve firar kenarı girdapları yeterli olacaktır. Ek olarak tek bir kanat ile inceleme yapılırken geometride kanada konum açısı vermek yerine hücum açısı vermek inceleme için yeterli olsa da birden fazla kanat ile işlem yapmak için hücum açısının yanında kanatların konum açılarının (a in ) eklenmesi gerekmektedir. Bu çerçevede P noktaları konum açıları için yeniden düzenlenmiş ve yazılımının son hali elde edilmiştir. İncelemelere başlamak için ULU-Multivortex yazılımının birden fazla taşıyıcı yüzey ile işlem yapabilmesi için gerekli denklem takımlarının eklenmesi gerekmektedir. İlk olarak Şekil 3.31 de DOGKY için verilen akış diyagramında giriş parametreleri arasına eklenmesi gereken parametreler: 53
84 - Taşıyıcı yüzey sayısı (nwing) - Taşıyıcı yüzeylerin x yönünde ötelenmesi (xh) - Taşıyıcı yüzeylerin y yönünde ötelenmesi (yh) - Taşıyıcı yüzeylerin z yönünde ötelenmesi (zh) Taşıyıcı yüzeyin birden fazla olması durumunda (NI), (NJ), (NW) parametreleri her yüzey için ayrı tanımlanabilir. Bu çalışmada bu parametreler tüm taşıyıcı yüzeyler için eşit kabul edilmiş ve bunun üzerinden işlemler yapılmıştır. Çalışma prensibi tamamen aynı olmasına rağmen denklem takımının (A) elde edilmesi aşamasında birden fazla yüzey kullanıldığı durum için tüm yüzeylerde indüklenmiş hızların hesaplanması adımına dikkat edilmelidir. Çözüm ağı farklı yüzeyler için ayrı ayrı denklem takımı kurgulayıp çözüm elde etmek yerine tek bir denklem takımı kurulması üzerine kurgulanmalıdır. Girdap şiddetleri elde edilmesi aşamasında kurgulanması gereken katsayılar matrisi (A) ve sağ yan vektörü (RHS) için gerekli programlama prensibi Şekil 4.1 üzerinde ayrıntılı gösterilmiştir. Şekil 4.1: Birden fazla taşıyıcı yüzeyde çözüm ağı kurgusu 54
85 Denklem takımının çözümlenmesinin ardından girdap şiddetleri elde edilmiş olur. Katsayılar matrisinin çözümünde elde ettiğimiz girdap şiddetleri bir vektör şeklinde olacaktır. Şekil 3.17 de girdap şiddetlerinin yeniden düzenlenmesi ifade edilmiştir. Bu aşamada çözümün yapılmasından sonra taşıyıcı yüzey parametresinde eklenerek yeniden girdap şiddetlerinin panellere dağıtılması gerekmektedir. Şekil 4.1 de ifade edildiği gibi bir kurgulama yapıldığında taşıyıcı yüzeylerin tanımlanma sırasına göre elde edilen girdap şiddetlerinin sırası da aynı olacaktır. Örneğin bir kanard-kanat tasarımında parametreleri ilk girilen kanard ise çözüm sonucunda girdap şiddetleri kanardın açıklık boyunca dağıtılmaya ardından veter boyunca bir alt sıraya geçip açıklık boyunca tekrarlanması şeklinde yapılır. Geliştirilen yazılım birden fazla taşıyıcı yüzey için yeniden düzenlenmiştir. Programın son halinin elde edilmesi ile kanadın önünde bulunan bir yüzeyin oluşturduğu girdapların kanat üzerinde etkilerini incelemek mümkün olacaktır. Geliştirilen ULU- Multivortex yazılımının çalışma prensibi ve kanat-ön kanat etkileşimi için elde edilen görüntüler şekiller yardımı ile adım adım ayrıntılı olarak verilmiştir. Doğrusal girdap kafes yöntemi ve doğrusal olmayan girdap kafes yöntemi için verilen adımlarda taşıma ve indüklenmiş sürükleme katsayısı hesaplanmış ve Tablo 4.2 üzerinde verilmiştir. Kanard Kanat NI 3 3 NJ NW AR 6 3 c 1 1 Λ o 0 0 λ 1 1 γ o 0 0 a o xh -3 0 yh 0 0 zh 0 0 a in 0 0 Tablo 4.1: ULU-Multivortex giriş parametreleri -Adım 1: Kanat geometrisi gösterimi -Adım 2: Kanat geometrisi doğrusal girdap gösterimi -Adım 3: Kanat geometrisi doğrusal olmayan girdap gösterimi -Adım 4: Kanat-kanard geometrisi gösterimi -Adım 5: Kanat-kanard geometrisi doğrusal girdap gösterimi -Adım 6: Kanat-kanard geometrisi doğrusal olmayan girdap gösterimi 55
 2: Doğrusal")
86 Şekil 4.3: Kanat geometrisi (Adım 1) Şekil 4.2: Doğrusal girdap gösterimi (Adım 2) 56
87 Şekil 4.4:Doğrusal olmayan girdap gösterimi (Adım 3) 57
88 Şekil 4.5: Kanat-kanard gösterimi (Adım 4) Şekil 4.6: Doğrusal girdap gösterimi (Adım 5) 58

89 Şekil 4.7: Kanat-kanard doğrusal olmayan girdap gösterimi (Adım 6) 59
90 Girdap şiddetleri ULU-Multivortex Cl Cdi Doğrusal girdap kafes yöntemi (Sadece kanat) Doğrusal olmayan girdap kafes yöntemi (Sadece kanat) Doğrusal girdap kafes yöntemi (Kanat-Kanard) Doğrusal olmayan girdap kafes yöntemi (Kanat-Kanard) Tablo 4.2: Aerodinamik katsayıların değişimi Açıklık ve veter boyunca yük dağılımı Kanat-Kanard Sadece kanat Açıklık boyunca paneller Şekil 4.8: Kanat üzerinde yük dağılımı değişimi Taşıma ve indüklenmiş sürükleme katsayılarının hesaplanması aşamasında sadece kanat üzerinde elde edilen girdap şiddetleri kullanılmıştır. Tablo 4.2 ile verilen aerodinamik katsayılar sadece kanadın sahip olduğu katsayılardır. Şekil 4.8 üzerinde ULU-Multivortex yazılımının en son kanat-kanard etkileşiminde girdap şiddetleri dağılımı gösterilmiştir. Verilen verilerde veter boyunca 3 panel seçilmiştir ve şekilde kanat-kanard ve sadece kanat yük dağılımında görülen 3 farklı sütun sırasıyla, yüksek girdap şiddeti olan sütun hücum kenarına yakın, en küçük olan ise firar kenarına yakın paneli gösterecek şekilde veter boyunca dağılımı temsil etmektedir. Şekil incelendiğinde kanard etkisi olmadığı durum için yük dağılımı açıklık boyunca sağ ve sol kanat ucundan merkeze doğru gidildiğinde hep artan yönde olduğu fakat kanard eklendiğinde kanat köküne ilerledikçe önce artan ardından azalan bir etki olduğu görülmektedir. Bu çerçevede kanard üzerinden ayrılan girdapların kanat üzerinde etkili olduğu ve yük dağılımını değiştirdiği sonucuna ulaşılabilir. 60

91 4.1. Kanat-Kanard Etkileşimi Karşılaştırma Bu bölümde geliştirilen yazılımın kanat-kanard etkileşimi üzerine incelemeleri yapılmıştır. İlk olarak belirli bir delta kanat parametresi seçilip kanardın bu kanat üzerinde etkileri incelenmiştir. İlk verileri elde etmek için Lacey (1970) tarafından incelenen kanard-kanat görünümü CATIA programı üzerinde boyutlandırılmıştır. Ardından elde edilen boyutlar SAAB 37 Vigen uçağının bilinen kanat açıklığına göre belirli oranda küçültülmüş ve programa girilmiştir. Şekil 4.9: Delta kanat-kanard geometri boyutlandırılması [9] Şekil 4.10: ULU-Multivotex üzerinde elde edilen geometri SAAB-37 (Vigen)Kanat açıklığı = 10.6 m CATIA üzerinde kanat açıklığı=68.95 Gerekli küçültme oranı = (10.6/68.95)= ULU-Multivortex giriş parametreleri Kanard Kanat NI 3 3 NJ NW Cr b Λ o λ 0 0 γ o 0 0 xh yh 0 0 zh 0 0 Tablo 4.3: Elde edilen kanat-kanard geometri giriş parametreleri 61
92 Cn (Kanard normal kuvvet katsayısı) Şekil 4.11: Kanard girdap etkileşim incelemesi [9] Şekil 4.11 SAAB raporundan alınan verileri göstermektedir (Lacey, 1970). Bu uçakta kullanılan profil bilinmemektedir fakat uçuş Mach sayıları düşünüldüğünde kritik üstü bir profil olduğu yorumlanabilir. Şekil 4.11 ile verilen grafik önce bir program aracılığı ile verilere dönüştürülmüş ardından ULU-Multivortex yazılımından elde edilen veriler grafikler üzerinde karşılaştırılmıştır. ( ac kanard konum açısını, a hücum açısını temsil etmektedir.) Cn-alfa Toplam hücum açısı (αc+α) ac=1 (Lacey 1970) ac=1 (ULU-Multivotex) Şekil 4.12: Kanard-kanat etkileşiminin kanard normal kuvveti üzerinde etkisi 62
93 Cn (Kanard) Cn (Kanard) Cn-alfa ac=10 (Lacey 1970) ac=10 (ULU-Multivortex) Toplam hücum açısı (αc+α) Şekil 4.13: Kanard-kanat etkileşiminin kanard normal kuvveti üzerinde etkisi Cn-alfa 2.5 sadece kanard (Lacey 1970) Toplam hücum açısı (αc+α) Şekil 4.14: Kanard-kanat etkileşiminin kanard normal kuvveti üzerinde etkisi (Not: Şekil 4.12 ve 4.13 grafiklerinde yer alan hesaplamalarda ULU-Multivortex yazılımına kanard zh değeri 0.1 girilmiştir.) Öncelikle grafiklerde karşılaştırmalar yapılırken dikkat edilmesi gereken en önemli husus geometrinin ve profil girdilerinin tam bilinmemesidir. Bu karşılaştırmayı yapmanın asıl amacı kanard etkileşimi için yazılan ULU-Multivortex yazılımının daha önce yapılan bir çalışma ile aynı yönelimleri gösterip göstermediğini test etmektir. Ayrıca viskozitenin etkisinden kaynaklı akım ayrımları modellenmediği için yüksek hücum açılarında gerçek değerdeki değişimlerin elde edilememesi beklenen bir durumdur. 63
94 4.2. Kanat-Kanard Etkileşimi Sonuçların Değerlendirilmesi Statik dengeye sahip bir uçak tasarımında kanadın arkasında olacak şekilde geleneksel bir yatay kuyruk negatif taşıma üretmektedir. Diğer yandan önde kullanılan kanard pozitif taşıma üretmektedir. Bu sayede toplam taşımayı artırıcı bir özellik göstermektedir. Taşıma katsayısının öncelikli fonksiyonu (kanard alanı/kanat alanı) ve kanard konumu ile ifade edilebilir (Lacey, 1970). Ayrıca kullanılan kanardın düşey konumu akımdaki sapmalarda önemli bir parametredir. Şekil 4.15 kanat konumuna göre yerleştiren farklı yüzeylerin taşımaya etkisini göstermektedir. Şekil 4.15: Kanardın taşıma katsayısı üzerinde etkisi [9] 64
95 Şekil 4.16: Kanard konumuna göre Cl değişimi [9] Şekil 4.16 kanardın düşey konumuna göre taşıma katsayısına etkisini göstermektedir. Şekil incelendiğinde 0 o konum açısında kanat konumuna göre üste konumlandırılan kanardın taşıma katsayısını artırdığı, alta konumlandıranın ise taşıma katsayında çok az bir değişime sebep olduğu yorumu çıkarılmaktadır. Bir diğer yorum ise kanarda 10 o bir konum açısı verildiğinde 12 o hücum açısından sonra alt konumda olan kanardın taşıma katsayısında düşüşe sebep olduğudur. Bu aşamada bitirme çalışması kapsamında SAAB uçağına ait Tablo 4.3 üzerinde verilen bilgilerden kanata ait olanlar sabit tutulup kanard konumu, kanard konum açısı ve kanard açıklığı değiştirilerek ideal durum yakalanmaya çalışılmıştır. Bu çerçevede hücum açısı 10 o de sabitlenmiş, aerodinamik katsayılar ve program görüntüleri bu açı üzerinden elde edilmiştir. Ardından elde edilen en ideal durum için aerodinamik katsayıların hücum açısına göre değişimi incelenmiştir. Başlangıçta sabit bir hücum açısında veri alınmasının sebebi sürecin tekrarlı olmasından kaynaklı hızlı veri elde etmektir. Tablo 4.4 ilk incelenen ve en ideal yapılmaya çalışılan geometriyi göstermektedir. Tablo üzerinde sarı işaretli bölümler değiştirilmesi hedeflenen değerlerdir. Yapılan çalışma 4 farklı adımda incelenmiştir. İlk adım kanardın AR değerinin değiştirilmesi, ikinci adım ok açısı, üçüncü adım düşey konumun ve son adım yatay konumun değiştirilmesi olarak bölünmüştür. 65
96 Şekil 4.17: Kanard konum parametreleri geometri gösterimi ULU-Multivortex giriş parametreleri Kanard Kanat NI 3 3 NJ NW Cr b Λ o λ 0 0 γ o 0 0 xh yh 0 0 zh 0 0 Tablo 4.4: Başlangıç geometri giriş parametreleri Kanat-kanard ikilisinde toplam kanard ve kanat üzerinde girdap şiddetleri ayrı ayrı bulunmuştur. Bu girdap şiddetleri kullanılarak kanard ve kanat için ayrı ayrı Cl ve Cdi katsayıları hesaplanmıştır. Ek olarak toplam Cl ve Cdi katsayılarının elde edilmesinde referans alan kanat alanı seçilmiştir ve denklem (22) de formüle edildiği şekilde toplam Cl ve Cdi hesaplanmıştır. Cl toplam = Cl kanat + Cl kanard (S kanard /S kanat ) (22) Cdi toplam = Cdi kanat + Cdi kanard (S kanard /S kanat ) L = q Cl toplam S kanat Di = q Cdi toplam S kanat 66
97 Değişen Kanard AR 67
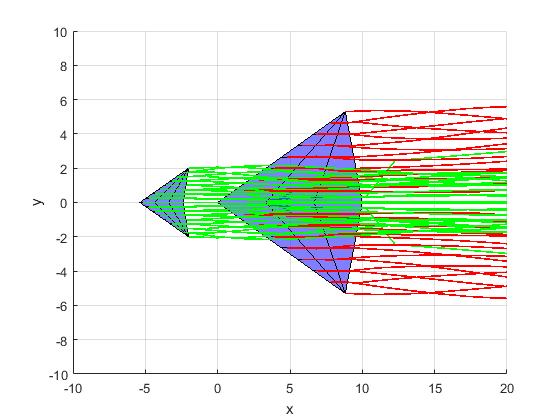
98 68
99 Toplam Cdi Toplam Cl Kanard AR'a göre dağılım Skanard/Skanat AR=7 AR=6 AR=5 AR=3.33 AR=2.67 AR=1.5 Şekil 4.18: Taşıma katsayısının kanard geometrisine göre değişimi Kanard AR'a göre dağılım 0.03 AR=7 AR=6 AR= AR=3.33 AR=2.67 AR= Skanard/Skanat Şekil 4.19: Sürükleme katsayısının kanard geometrisine göre değişimi Grafikler yardımı ile kanard-kanat alan oranının ve kanard AR taşıma ve sürükleme katsayısı üzerinde etkisi görülmektedir. İlk inceleme kanard-kanat alanının artırılması taşımayı artırıcı bir etki göstermektedir. Aynı kanard-kanat alan oranına sahip verileri incelediğimizde kanard AR nın artırılması taşımayı artırıcı etki yapmaktadır. Kanardın ortalama veter ve açıklığı seçilirken hem kanard alanının hem de AR nın toplam taşıma üzerinde etkili olduğu görülmektedir. Diğer yandan verim açısından (Cl/Cdi) inceleme yapıldığında, Şekil 4.20 üzerinde artan AR a göre verimin artığı gözlemlenmiştir. 69
100 Girdap şiddeti Cl/Cdi Kanard AR'a göre dağılım Skanard/Skanat AR=7 AR=6 AR=5 AR=3.33 AR=2.67 AR=1.5 Şekil 4.20: Verimin kanard geometrisine göre değişimi Yük dağılımı Kanard ve kanat açıklığı Kanat Kanard AR=7 AR=6 AR=5 AR=3.33 AR=2.67 AR=1.5 Şekil 4.21: Değişen kanard geometrisine göre kanat ve kanard üzerinde yük dağılımları Şekil 4.21 üzerinde farklı kanard açıklık oranına göre yük dağılımları incelenmiştir. Kanard açıklık oranına bağlı olarak kanard tarafından üretilen girdap şiddetleri değişkenlik göstermektedir. AR küçüldükçe daha şiddetli girdapların ortaya çıktığını ve kanard açıklığına göre kanadın yük dağılımında etkili olduğu görülmektedir. Kanard tasarımı yapılırken iz bölgesinde kalan diğer parçaların örneğin dikey kuyruk, kanard kaynaklı girdaplar tarafından etkileneceği ve yüksek hücum açılarında bir titreşime maruz kalacağı yorumu çıkarılmaktadır. 70

101 Toplam Cl Değişen Ok Açısı AR değişimine göre yapılan incelemelerde verilen toplam taşıma katsayısı grafiğinde en yüksek taşımayı AR=7 olduğu durum için elde etmekteyiz. Fakat yapısal olarak düşünüldüğünde düşük AR da yüksek Cl elde etmek daha ideal durum olacaktır. Bu çerçevede SAAB 37 uçağının ilk geometrisi de düşünülerek kanard geometrisi ilk incelemenin ardında AR=3.33 şekilde sabitlenmiştir Şekil 4.22: Değişen kanard ok açsının geometrik gösterimi Ok açısı değişimi Kanard ok açısı Şekil 4.23: Değişen ok açının taşıma üzerinde etkisi 71
102 Cl/Cdi Toplam Cdi Ok açısı değişimi Kanard ok açısı Şekil 4.24: Değişen ok açısının sürükleme üzerinde etkisi Ok açısı değişimi Kanard ok açısı Şekil 4.25: Değişen ok açısının verim üzerinde etkisi Kanard için artan ok açısına bağlı olarak aerodinamik katsayılar ok açısı aralığına göre 50 o ok açısına kadar azalan ve ardından artan-azalan etki göstermektedir. Bu çerçevede tasarlanan uçağın görevine göre seçilmesi gereken ok açısı farklılık göstermektedir. Örneğin kısa mesafede kalkış yapması planlanan bir uçak için yüksek taşıma katsayısı için düşük ok açıları tercih edilebilir. Bu çalışmada kanat ön kanat etkileşimi en iyileştirilmesi için değiştirilen parametrelerden en ideal durumlar elde edilmek istenmektedir. Değişen ok açısına bağlı olarak grafik 8 üzerinde verim incelendiğinde en yüksek verimin 70 o ve 50 o ok açılarında elde edildiği gözlemlenmiştir. 70 o bir geometri için yüksek bir ok açısıdır. Bu çalışmada ilk incelemede belirlenen geometrinin ardından ikinci inceleme ile 50 o ok açısı seçilmiş ve bundan sonraki kanardın konum parametreleri bu açı üzerinden incelenmiştir. 72
103 Değişen Düşey Konum 73
104 74
105 Cl/Cdi Toplam Cdi Toplam Cl Değişen düşey konum Düşey konum (* birim) Şekil 4.26: Değişen düşey konumun taşıma üzerinde etkisi Değişen düşey konum Düşey konum (* birim) Şekil 4.27: Değişen düşey konumun sürükleme üzerinde etkisi Değişen düşey konum Düşey konum (* birim) Şekil 4.28: Değişen düşey konumun verim üzerinde etkisi 75
106 Girdap şiddetleri Açıklık boyunca kanat yük dağılımı Kanat açıklığı Kanard zh= -1.2 Kanard zh= -0.6 Kanard zh= 0 Kanard zh= 0.6 Kanard zh= 1.2 Kanard zh= 1.5 Şekil 4.29: Değişen düşey konumun kanat yük dağılımı üzerinde etkisi Düşey konum incelemelerinde hücum açısı sabit 10 o olarak seçilmiştir. Farklı hücum açılarında düşey konumun aerodinamik katsayılar üzerinde etkisi farklılık gösterebilir. Yapılan yaklaşım bir uçağın 10 derece hücum açısında piste yaklaştığı bir durumu elde etmek üzerine kurgulanmıştır. Grafikler incelendiğinde düşey konumun kanada göre üst konuma yerleştirildiği durumda taşıma katsayısının arttığı görülmektedir. Kanada göre alt konuma yerleştirilen kanard yapısından elde edilen görsel veri incelendiğinde girdabın kanadın üst ve alt yüzeyinden geçtiği görülmektedir. Kanardtan ayrılan girdaplar kanat üzerinde belirli bölgelerde emme etkisi göstermekte ve kanat üzerinde basınç farkını artırmaktadır. Analizler sonucunda elde edilen genel yargı, kanard düşey olarak konumlandırılırken kanada göre yukarıya konumlandırılması pozitif hücum açısında taşımayı artırmaktadır ve incelenen hücum açısında aralığında artan mesafe taşımaya belirgin etki göstermemektedir. Bu çerçevede düşey konum etkisinin uçuş hücum açısına bağlı olduğu ve büyük etki gösterdiği söylenebilir. Diğer yandan 5 birim açıklığa ve 3 birim kök veter uzunluğuna sahip bir kanat için verim incelemesi yapıldığında, yapılan analiz sayısına bağlı olarak elde edilen verilerden verimin 0.2 birim yükseklikten sonra küçük değişiklikler yaptığı gözlemlenmiştir. Bu çerçevede düşey konumlandırma 0.2 birim değeri tercih edilmiş ve son inceleme olarak yatay konumlandırmadan önce bu değer sabitlenmiştir. 76
107 Toplam Cl Değişen Yatay Konum Şekil 4.30: Değişen kanard yatay konumunun geometrik gösterimi 0.6 Değişen yatay konum Yatay eksen konum (*birim) Şekil 4.31: Değişen yatay konumun taşıma üzerinde etkisi 77
108 Toplam Cdi 0.06 Değişen yatay konum Yatay eksen konum (*birim) Şekil 4.32: Değişen yatay konumun sürükleme üzerinde etkisi Değiştirilen yatay konuma göre aerodinamik katsayılar incelendiğinde kanattan 9 birim ve 4 birim uzaklıkta bulunan bir kanard toplam aerodinamik kuvvetler üzerinde %1-2 mertebelerinde bir değişikliğe neden olmaktadır. Elde edilen grafikler incelendiğinde kanard-kanat arasındaki mesafe arttıkça toplam taşıma kuvveti küçükte olsa artmaktadır. Bu çerçevede düşey konumlandırma için SAAB verilerinde ilk kullanılan xh = 5.38 verisi değiştirilmemiştir. 4 farklı incelemenin ardından tek bir hücum açısına odaklanarak sabit bir kanat geometrisi üzerinden bir kanardın ideal durumları elde edilmeye çalışılmıştır ve grafik yardımı ile incelemelerin ardından Şekil 4.33 üzerinde verilen geometri elde edilmiştir. Elde edilen son geometri Başlangıçta ele alınan geometri Şekil 4.33: Elde edilen kanard-kanat geometrisi 78
109 5. SONUÇLARIN DEĞERLENDİRİLMESİ Bitirme çalışması kapsamında tarafımdan ilk kez doğrusal olmayan girdap kafes yöntemleri deneyimlenmiştir. Bu çalışmada ilk olarak bir kanadın aerodinamik katsayılarının doğrusal ardından doğrusal olmayan yöntemlerle incelemesi yapılmıştır. Bu incelemeler sonucunda ilk olarak hücum ve firar kenarında ayrılan girdapların AR etkisi anlaşılmaya çalışılmıştır. Yüksek AR sahip bir kanat için kanat ucu girdap sarmalanmaları çok fazla etki göstermemektedir. AR küçüldükçe girdapların etkisi artmaktadır ve aerodinamik katsayılar üzerinde değişen hücum açısına bağlı olarak doğrusal olmayan bir etki göstermektedir. Bir diğer inceleme de geliştirilen doğrusal olmayan girdap kafes yöntemi tabanlı yazılım yardımı ile kanard yapılarının kanat-kanard ikilisinde toplam oluşturulan aerodinamik kuvvetler üzerinedir. Bu incelemede ele alınan 4 farklı parametreden yatay konum parametresi aerodinamik katsayılar üzerinde baskın bir karakteristik özellik göstermemektedir. Ok açısı, kanard düşey konumu ve kanard geometrisi parametreleri kanat yük dağılımını ve toplam taşıma ve indüklenmiş sürükleme kuvvetini etkileyen baskın parametrelerdir. Yapılan incelemelerin ardından ULU-Multivotex yazılımı üzerinde en son elde edilen idealleştirilmiş kanard geometrisi için hücum açısına bağlı aerodinamik kuvvetler için ayrıntılı bir hesaplama yapılmıştır. ULU-Multivortex giriş parametreleri Kanard Kanat NI 3 3 NJ NW Cr 3 10 b Λ o λ 0 0 γ o 0 0 xh yh 0 0 zh Tablo 5.1: Elde edilen kanard ve kanat geometrisi program giriş parametreleri 79
110 Cdi Cl Cl-Alfa Kanard konum açısı= 0 (derece) Kanard konum açısı= 10 (derece) Sadece kanat Alfa Şekil 5.1: Kanardın toplam taşıma katsayısı üzerinde etkisi Cdi-Alfa Kanard konum açısı=0 (derece) Kanard konum açısı= 10 (derece) Sadece kanat Alfa Şekil 5.2: Kanardın toplam indüklenmiş sürükleme katsayısı üzerinde etkisi 80
111 Şekil 5.3: 10 o hücum açısında programdan alınan önden görünüm (kanard konum açısı=10 o ) Şekil 5.4: 10 o hücum açısında programdan alınan arkadan görünüm (kanard konum açısı=10 o ) (Not: Görüntüler 2-D eksenden alınmak yerine yaklaşık arkadan ve önden görünüm elde edilecek şekilde 3-D görselden alınmıştır.) 81

112 Şekil 5.5: 10 o hücum açısında programdan alınan üstten görünüm (kanard konum açısı=10 o ) Şekil 5.6: Programdan alınan aerodinamik katsayılar Geliştirilen yazılım kanat ön kanat etkileşimi için girdap etkilerini incelemeye yardımcı olmaktadır. Bu yazılımın eksiği viskozitenin hesaplamalara katılmamasıdır. Yazılım, deneysel verileri ya da sınır tabaka denklemlerini kullanarak viskozitenin eklenmesine açıktır. Bu çalışmada hesaplamalara katılmayan kanat kalınlığı da yazılıma eklenebilmektedir. Bir profil girdisi kullanarak girdap etkileri incelenmek istendiğinde yazılımda yapılan değişiklikler buna olanak sağlayacaktır. 82
AERODİNAMİK KUVVETLER
 AERODİNAMİK KUVVETLER Prof.Dr. Mustafa Cavcar Anadolu Üniversitesi, Sivil Havacılık Yüksekokulu, 26470 Eskişehir Bir uçak üzerinde meydana gelen aerodinamik kuvvetlerin bileşkesi ( ); uçağın etrafından
AERODİNAMİK KUVVETLER Prof.Dr. Mustafa Cavcar Anadolu Üniversitesi, Sivil Havacılık Yüksekokulu, 26470 Eskişehir Bir uçak üzerinde meydana gelen aerodinamik kuvvetlerin bileşkesi ( ); uçağın etrafından
SES-ÜSTÜ KANARD KONTROLLÜ FÜZELER İÇİN SERBEST DÖNEN KUYRUĞUN ŞEKİL OPTİMİZASYONU
 VI. ULUSAL HAVACILIK VE UZAY KONFERANSI 28-30 Eylül 2016, Kocaeli Üniversitesi, Kocaeli UHUK-2016-116 SES-ÜSTÜ KANARD KONTROLLÜ FÜZELER İÇİN SERBEST DÖNEN KUYRUĞUN ŞEKİL OPTİMİZASYONU Erhan Feyzioğlu 1
VI. ULUSAL HAVACILIK VE UZAY KONFERANSI 28-30 Eylül 2016, Kocaeli Üniversitesi, Kocaeli UHUK-2016-116 SES-ÜSTÜ KANARD KONTROLLÜ FÜZELER İÇİN SERBEST DÖNEN KUYRUĞUN ŞEKİL OPTİMİZASYONU Erhan Feyzioğlu 1
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
KANAT PROFİLİ ETRAFINDAKİ SIKIŞTIRILAMAZ AKIŞ
 KANAT PROFİLİ ETRAFINDAKİ SIKIŞTIRILAMAZ AKIŞ Uçağı havada tutan kanadın oluşturduğu taşıma kuvvetidir. Taşıma kuvvetinin hesaplanması, hangi parametrelere bağlı olarak değiştiğinin belirlenmesi önemlidir.
KANAT PROFİLİ ETRAFINDAKİ SIKIŞTIRILAMAZ AKIŞ Uçağı havada tutan kanadın oluşturduğu taşıma kuvvetidir. Taşıma kuvvetinin hesaplanması, hangi parametrelere bağlı olarak değiştiğinin belirlenmesi önemlidir.
Şekil 1:Havacılık tarihinin farklı dönemlerinde geliştirilmiş kanat profilleri
 TEORİ Şekil 1:Havacılık tarihinin farklı dönemlerinde geliştirilmiş kanat profilleri İlk motorlu uçuşun yolunu açan ihtiyaç duyulan taşımayı sağlayacak kanat profillerinin geliştirilmesi doğrultusunda
TEORİ Şekil 1:Havacılık tarihinin farklı dönemlerinde geliştirilmiş kanat profilleri İlk motorlu uçuşun yolunu açan ihtiyaç duyulan taşımayı sağlayacak kanat profillerinin geliştirilmesi doğrultusunda
BÜYÜK ORANDA ŞEKİL DEĞİŞTİREBİLEN KANATLARIN ÖN TASARIM SÜRECİNDE AERODİNAMİK VE YAPISAL ANALİZLERİNİN EŞLENMESİ
 IV. ULUSAL HAVACILIK VE UZAY KONFERANSI 12-14 Eylül 2012, Hava Harp Okulu, İstanbul BÜYÜK ORANDA ŞEKİL DEĞİŞTİREBİLEN KANATLARIN ÖN TASARIM SÜRECİNDE AERODİNAMİK VE YAPISAL ANALİZLERİNİN EŞLENMESİ D. Sinan
IV. ULUSAL HAVACILIK VE UZAY KONFERANSI 12-14 Eylül 2012, Hava Harp Okulu, İstanbul BÜYÜK ORANDA ŞEKİL DEĞİŞTİREBİLEN KANATLARIN ÖN TASARIM SÜRECİNDE AERODİNAMİK VE YAPISAL ANALİZLERİNİN EŞLENMESİ D. Sinan
AERODİNAMİK KUVVETLER
 AERODİNAMİK KUVVETLER Hazırlayan Prof. Dr. Mustafa Cavcar Aerodinamik Kuvvet Bir uçak üzerinde meydana gelen aerodinamik kuvvetlerin bileşkesi ( ); uçağın havayagörehızının () karesi, havanın yoğunluğu
AERODİNAMİK KUVVETLER Hazırlayan Prof. Dr. Mustafa Cavcar Aerodinamik Kuvvet Bir uçak üzerinde meydana gelen aerodinamik kuvvetlerin bileşkesi ( ); uçağın havayagörehızının () karesi, havanın yoğunluğu
AKIŞKANLAR MEKANİĞİ-II
 AKIŞKANLAR MEKANİĞİ-II Şekil 1. Akışa bırakılan parçacıkların parçacık izlemeli hızölçer ile belirlenmiş cisim arkasındaki (iz bölgesi) yörüngeleri ve hızlarının zamana göre değişimi (renk skalası). Akış
AKIŞKANLAR MEKANİĞİ-II Şekil 1. Akışa bırakılan parçacıkların parçacık izlemeli hızölçer ile belirlenmiş cisim arkasındaki (iz bölgesi) yörüngeleri ve hızlarının zamana göre değişimi (renk skalası). Akış
TAŞIYICI YÜZEYLERİN HALKA GİRDAP YÖNTEMİ İLE ANALİZİ VE GENETİK ALGORİTMA ARACILIĞIYLA ENİYİLEMESİ BİTİRME ÇALIŞMASI.
 İSTANBUL TEKNİK ÜNİVERSİTESİ UÇAK VE UZAY BİLİMLERİ FAKÜLTESİ TAŞIYICI YÜZEYLERİN HALKA GİRDAP YÖNTEMİ İLE ANALİZİ VE GENETİK ALGORİTMA ARACILIĞIYLA ENİYİLEMESİ BİTİRME ÇALIŞMASI Şıhmehmet YILDIZ Uçak
İSTANBUL TEKNİK ÜNİVERSİTESİ UÇAK VE UZAY BİLİMLERİ FAKÜLTESİ TAŞIYICI YÜZEYLERİN HALKA GİRDAP YÖNTEMİ İLE ANALİZİ VE GENETİK ALGORİTMA ARACILIĞIYLA ENİYİLEMESİ BİTİRME ÇALIŞMASI Şıhmehmet YILDIZ Uçak
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Şekil 2: Kanat profili geometrisi
 Kanat Profili ve Seçimi Şekil 1: İki boyutlu akım modeli Herhangi bir kanat, uçuş doğrultusuna paralel olarak (gövde doğrultusunda) kesildiğinde şekil 1 olduğu gibi bir görüntü elde edilir. Şekil 2: Kanat
Kanat Profili ve Seçimi Şekil 1: İki boyutlu akım modeli Herhangi bir kanat, uçuş doğrultusuna paralel olarak (gövde doğrultusunda) kesildiğinde şekil 1 olduğu gibi bir görüntü elde edilir. Şekil 2: Kanat
İ çindekiler. xvii GİRİŞ 1 TEMEL AKIŞKANLAR DİNAMİĞİ BERNOULLİ DENKLEMİ 68 AKIŞKANLAR STATİĞİ 32. xvii
 Last A Head xvii İ çindekiler 1 GİRİŞ 1 1.1 Akışkanların Bazı Karakteristikleri 3 1.2 Boyutlar, Boyutsal Homojenlik ve Birimler 3 1.2.1 Birim Sistemleri 6 1.3 Akışkan Davranışı Analizi 9 1.4 Akışkan Kütle
Last A Head xvii İ çindekiler 1 GİRİŞ 1 1.1 Akışkanların Bazı Karakteristikleri 3 1.2 Boyutlar, Boyutsal Homojenlik ve Birimler 3 1.2.1 Birim Sistemleri 6 1.3 Akışkan Davranışı Analizi 9 1.4 Akışkan Kütle
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1. Y. Doç. Dr. Güray Doğan
 ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
Elektromanyetik Dalga Teorisi
 Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
2-MANYETIK ALANLAR İÇİN GAUSS YASASI
 2-MANYETIK ALANLAR İÇİN GAUSS YASASI Elektrik yükleri yani pozitif ve negatif yükler birbirlerinden ayrı ve izole halde düşünülebilirler. Bu durum, Kuzey ve güney manyetik kutuplar için de söz konusu olabilir
2-MANYETIK ALANLAR İÇİN GAUSS YASASI Elektrik yükleri yani pozitif ve negatif yükler birbirlerinden ayrı ve izole halde düşünülebilirler. Bu durum, Kuzey ve güney manyetik kutuplar için de söz konusu olabilir
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
MAK4061 BİLGİSAYAR DESTEKLİ TASARIM
 MAK4061 BİLGİSAYAR DESTEKLİ TASARIM (Shell Mesh, Bearing Load,, Elastic Support, Tasarım Senaryosunda Link Value Kullanımı, Remote Load, Restraint/Reference Geometry) Shell Mesh ve Analiz: Kalınlığı az
MAK4061 BİLGİSAYAR DESTEKLİ TASARIM (Shell Mesh, Bearing Load,, Elastic Support, Tasarım Senaryosunda Link Value Kullanımı, Remote Load, Restraint/Reference Geometry) Shell Mesh ve Analiz: Kalınlığı az
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
DÜZ FLAPLI POZİTİF KAMBURA SAHİP NACA 4412 KANAT PROFİLİNİN AERODİNAMİK PERFORMANSININ BİLGİSAYAR DESTEKLİ ANALİZİ
 2. Ulusal Tasarım İmalat ve Analiz Kongresi 11-12 Kasım 2010- Balıkesir DÜZ FLAPLI POZİTİF KAMBURA SAHİP NACA 4412 KANAT PROFİLİNİN AERODİNAMİK PERFORMANSININ BİLGİSAYAR DESTEKLİ ANALİZİ Barış ÖNEN*, Ali
2. Ulusal Tasarım İmalat ve Analiz Kongresi 11-12 Kasım 2010- Balıkesir DÜZ FLAPLI POZİTİF KAMBURA SAHİP NACA 4412 KANAT PROFİLİNİN AERODİNAMİK PERFORMANSININ BİLGİSAYAR DESTEKLİ ANALİZİ Barış ÖNEN*, Ali
ELEKTROMANYETIK ALAN TEORISI
 ELEKTROMANYETIK ALAN TEORISI kaynaklar: 1) Electromagnetic Field Theory Fundamentals Guru&Hiziroglu 2) A Student s Guide to Maxwell s Equations Daniel Fleisch 3) Mühendislik Elektromanyetiğinin Temelleri
ELEKTROMANYETIK ALAN TEORISI kaynaklar: 1) Electromagnetic Field Theory Fundamentals Guru&Hiziroglu 2) A Student s Guide to Maxwell s Equations Daniel Fleisch 3) Mühendislik Elektromanyetiğinin Temelleri
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü
 Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 kışkan Statiğine Giriş kışkan statiği (hidrostatik, aerostatik), durgun haldeki akışkanlarla
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 kışkan Statiğine Giriş kışkan statiği (hidrostatik, aerostatik), durgun haldeki akışkanlarla
Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok
 Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
DENEYİN AMACI Akım uygulanan dairesel iletken bir telin manyetik alanı ölçülerek Biot-Savart kanunu
 DENEY 9 DENEYİN ADI BIOT-SAVART YASASI DENEYİN AMACI Akım uygulanan dairesel iletken bir telin manyetik alanı ölçülerek Biot-Savart kanunu deneysel olarak incelemek ve bobinde meydana gelen manyetik alan
DENEY 9 DENEYİN ADI BIOT-SAVART YASASI DENEYİN AMACI Akım uygulanan dairesel iletken bir telin manyetik alanı ölçülerek Biot-Savart kanunu deneysel olarak incelemek ve bobinde meydana gelen manyetik alan
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1. Y. Doç. Dr. Güray Doğan
 ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
Pervane 10. PERVANE TEORİLERİ. P 2 v 2. P 1 v 1. Gemi İlerleme Yönü P 0 = P 2. Geliştirilmiş pervane teorileri aşağıdaki gibi sıralanabilir:
 . PEVANE TEOİLEİ Geliştirilmiş perane teorileri aşağıdaki gibi sıralanabilir:. Momentum Teorisi. Kanat Elemanı Teorisi 3. Sirkülasyon (Girdap) Teorisi. Momentum Teorisi Momentum teorisinde aşağıdaki kabuller
. PEVANE TEOİLEİ Geliştirilmiş perane teorileri aşağıdaki gibi sıralanabilir:. Momentum Teorisi. Kanat Elemanı Teorisi 3. Sirkülasyon (Girdap) Teorisi. Momentum Teorisi Momentum teorisinde aşağıdaki kabuller
ÇEV-220 Hidrolik. Çukurova Üniversitesi Çevre Mühendisliği Bölümü Yrd. Doç. Dr. Demet KALAT
 ÇEV-220 Hidrolik Çukurova Üniversitesi Çevre Mühendisliği Bölümü Yrd. Doç. Dr. Demet KALAT Borularda Türbülanslı Akış Mühendislik uygulamalarında akışların çoğu türbülanslıdır ve bu yüzden türbülansın
ÇEV-220 Hidrolik Çukurova Üniversitesi Çevre Mühendisliği Bölümü Yrd. Doç. Dr. Demet KALAT Borularda Türbülanslı Akış Mühendislik uygulamalarında akışların çoğu türbülanslıdır ve bu yüzden türbülansın
KLİMA SANTRALLERİNDEKİ BOŞ HÜCRELER İÇİN TASARLANAN BİR ANEMOSTAT TİP DİFÜZÖRÜN AKIŞ ANALİZİ
 KLİMA SANTRALLERİNDEKİ BOŞ HÜCRELER İÇİN TASARLANAN BİR ANEMOSTAT TİP DİFÜZÖRÜN AKIŞ ANALİZİ Ahmet KAYA Muhammed Safa KAMER Kerim SÖNMEZ Ahmet Vakkas VAKKASOĞLU Kahramanmaraş Sütçü İmam Üniversitesi Mühendislik
KLİMA SANTRALLERİNDEKİ BOŞ HÜCRELER İÇİN TASARLANAN BİR ANEMOSTAT TİP DİFÜZÖRÜN AKIŞ ANALİZİ Ahmet KAYA Muhammed Safa KAMER Kerim SÖNMEZ Ahmet Vakkas VAKKASOĞLU Kahramanmaraş Sütçü İmam Üniversitesi Mühendislik
Uluslararası Yavuz Tüneli
 Uluslararası Yavuz Tüneli (International Yavuz Tunnel) Tünele rüzgar kaynaklı etkiyen aerodinamik kuvvetler ve bu kuvvetlerin oluşturduğu kesme kuvveti ve moment diyagramları (Aerodinamic Forces Acting
Uluslararası Yavuz Tüneli (International Yavuz Tunnel) Tünele rüzgar kaynaklı etkiyen aerodinamik kuvvetler ve bu kuvvetlerin oluşturduğu kesme kuvveti ve moment diyagramları (Aerodinamic Forces Acting
ÇATI MAKASINA GELEN YÜKLER
 ÇATI MAKASINA GELEN YÜKLER Bir yapıyı dış etkilere karşı koruyan taşıyıcı sisteme çatı denir. Belirli aralıklarla yerleştirilen çatı makaslarının, yatay taşıyıcı eleman olan aşıklarla birleştirilmesi ile
ÇATI MAKASINA GELEN YÜKLER Bir yapıyı dış etkilere karşı koruyan taşıyıcı sisteme çatı denir. Belirli aralıklarla yerleştirilen çatı makaslarının, yatay taşıyıcı eleman olan aşıklarla birleştirilmesi ile
ARAZİ ÖLÇMELERİ. Koordinat sistemleri. Kartezyen koordinat sistemi
 Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ISI TRANSFERİ LABORATUARI
 ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ISI TRANSFERİ LABORATUARI DENEY FÖYÜ DENEY ADI ZORLANMIŞ TAŞINIM DERSİN ÖĞRETİM ÜYESİ DENEYİ YAPTIRAN ÖĞRETİM ELEMANI DENEY
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ISI TRANSFERİ LABORATUARI DENEY FÖYÜ DENEY ADI ZORLANMIŞ TAŞINIM DERSİN ÖĞRETİM ÜYESİ DENEYİ YAPTIRAN ÖĞRETİM ELEMANI DENEY
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
EMAT ÇALIŞMA SORULARI
 EMAT ÇALIŞMA SORULARI 1) A = 4. ı x 2. ı y ı z ve B = ı x + 4. ı y 4. ı z vektörlerinin dik olduğunu gösteriniz. İki vektörün skaler çarpımlarının sıfır olması gerekir. A. B = 4.1 + ( 2). 4 + ( 1). ( 4)
EMAT ÇALIŞMA SORULARI 1) A = 4. ı x 2. ı y ı z ve B = ı x + 4. ı y 4. ı z vektörlerinin dik olduğunu gösteriniz. İki vektörün skaler çarpımlarının sıfır olması gerekir. A. B = 4.1 + ( 2). 4 + ( 1). ( 4)
Saf Eğilme(Pure Bending)
") Saf Eğilme(Pure Bending) Saf Eğilme (Pure Bending) Bu bölümde doğrusal, prizmatik, homojen bir elemanın eğilme etkisi altındaki şekil değiştirmesini/ deformasyonları incelenecek. Burada çıkarılacak formüller
Saf Eğilme(Pure Bending) Saf Eğilme (Pure Bending) Bu bölümde doğrusal, prizmatik, homojen bir elemanın eğilme etkisi altındaki şekil değiştirmesini/ deformasyonları incelenecek. Burada çıkarılacak formüller
YAVAŞ DEĞİŞEN ÜNİFORM OLMAYAN AKIM
 YAVAŞ DEĞİŞEN ÜNİFORM OLMAYAN AKIM Yavaş değişen akımların analizinde kullanılacak genel denklem bir kanal kesitindeki toplam enerji yüksekliği: H = V g + h + z x e göre türevi alınırsa: dh d V = dx dx
YAVAŞ DEĞİŞEN ÜNİFORM OLMAYAN AKIM Yavaş değişen akımların analizinde kullanılacak genel denklem bir kanal kesitindeki toplam enerji yüksekliği: H = V g + h + z x e göre türevi alınırsa: dh d V = dx dx
Yapısal Analiz Programı SAP2000 Bilgi Aktarımı ve Kullanımı. Doç.Dr. Bilge Doran
 Yapısal Analiz Programı SAP2000 Bilgi Aktarımı ve Kullanımı Dersin Adı : Yapı Mühendisliğinde Bilgisayar Uygulamaları Koordinatörü : Doç.Dr.Bilge DORAN Öğretim Üyeleri/Elemanları: Dr. Sema NOYAN ALACALI,
Yapısal Analiz Programı SAP2000 Bilgi Aktarımı ve Kullanımı Dersin Adı : Yapı Mühendisliğinde Bilgisayar Uygulamaları Koordinatörü : Doç.Dr.Bilge DORAN Öğretim Üyeleri/Elemanları: Dr. Sema NOYAN ALACALI,
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü. Ders içeriği
 ANTENLER Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü Ders içeriği BÖLÜM 1: Antenler BÖLÜM 2: Antenlerin Temel Parametreleri BÖLÜM 3: Lineer Tel Antenler BÖLÜM 4: Halka Antenler
ANTENLER Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü Ders içeriği BÖLÜM 1: Antenler BÖLÜM 2: Antenlerin Temel Parametreleri BÖLÜM 3: Lineer Tel Antenler BÖLÜM 4: Halka Antenler
2013 2014 EĞİTİM ÖĞRETİM YILI 8. SINIF MATEMATİK DERSİ KONULARININ ÇALIŞMA TAKVİMİNE GÖRE DAĞILIM ÇİZELGESİ ALT ÖĞRENME. Örüntü ve Süslemeler
 2013 2014 EĞİTİM ÖĞRETİM YILI 8. SINIF MATEMATİK DERSİ KONULARININ ÇALIŞMA TAKVİMİNE GÖRE DAĞILIM ÇİZELGESİ SÜRE ÖĞRENME Ay Hafta D.Saati ALANI EYLÜL 2 Geometri 2 3 Geometri 2 Geometri 2 Olasılıkve ALT
2013 2014 EĞİTİM ÖĞRETİM YILI 8. SINIF MATEMATİK DERSİ KONULARININ ÇALIŞMA TAKVİMİNE GÖRE DAĞILIM ÇİZELGESİ SÜRE ÖĞRENME Ay Hafta D.Saati ALANI EYLÜL 2 Geometri 2 3 Geometri 2 Geometri 2 Olasılıkve ALT
GEMİ DİRENCİ ve SEVKİ
 GEMİ DİRENCİ ve SEVKİ 1. GEMİ DİRENCİNE GİRİŞ Geminin istenen bir hızda seyredebilmesi için, ana makine gücünün doğru bir şekilde seçilmesi gerekir. Bu da gemiye etkiyen su ve hava dirençlerini yenebilecek
GEMİ DİRENCİ ve SEVKİ 1. GEMİ DİRENCİNE GİRİŞ Geminin istenen bir hızda seyredebilmesi için, ana makine gücünün doğru bir şekilde seçilmesi gerekir. Bu da gemiye etkiyen su ve hava dirençlerini yenebilecek
FLUID MECHANICS PRESSURE AND MOMENTUM FORCES A-PRESSURE FORCES. Example
 A-PRESSURE FORCES FLUID MECHANICS PRESSURE AND MOMENTUM FORCES Consider a duct as shown in figure. First identify the control volume on which to conduct a force balance. The inner passage is filled with
A-PRESSURE FORCES FLUID MECHANICS PRESSURE AND MOMENTUM FORCES Consider a duct as shown in figure. First identify the control volume on which to conduct a force balance. The inner passage is filled with
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
BÖLÜM 04. Çalışma Unsurları
 BÖLÜM 04 Çalışma Unsurları Autodesk Inventor 2008 Tanıtma ve Kullanma Kılavuzu SAYISAL GRAFİK Çalışma Unsurları Parça ya da montaj tasarımı sırasında, örneğin bir eskiz düzlemi tanımlarken, parçanın düzlemlerinden
BÖLÜM 04 Çalışma Unsurları Autodesk Inventor 2008 Tanıtma ve Kullanma Kılavuzu SAYISAL GRAFİK Çalışma Unsurları Parça ya da montaj tasarımı sırasında, örneğin bir eskiz düzlemi tanımlarken, parçanın düzlemlerinden
EŞANJÖR (ISI DEĞİŞTİRİCİSİ) DENEYİ FÖYÜ
 DENEYİ FÖYÜ") EŞANJÖR (ISI DEĞİŞTİRİCİSİ) DENEYİ FÖYÜ Giriş Isı değiştiricileri (eşanjör) değişik tiplerde olup farklı sıcaklıktaki iki akışkan arasında ısı alışverişini temin ederler. Isı değiştiricileri başlıca yüzeyli
EŞANJÖR (ISI DEĞİŞTİRİCİSİ) DENEYİ FÖYÜ Giriş Isı değiştiricileri (eşanjör) değişik tiplerde olup farklı sıcaklıktaki iki akışkan arasında ısı alışverişini temin ederler. Isı değiştiricileri başlıca yüzeyli
Bölüm 2: Kuvvet Vektörleri. Mühendislik Mekaniği: Statik
 Bölüm 2: Kuvvet Vektörleri Mühendislik Mekaniği: Statik Hedefler Kuvvetleri toplama, bileşenlerini ve bileşke kuvvetlerini Paralelogram Kuralı kullanarak belirleme. Diktörtgen (Cartesian) koordinat sistemi
Bölüm 2: Kuvvet Vektörleri Mühendislik Mekaniği: Statik Hedefler Kuvvetleri toplama, bileşenlerini ve bileşke kuvvetlerini Paralelogram Kuralı kullanarak belirleme. Diktörtgen (Cartesian) koordinat sistemi
Yığma yapı elemanları ve bu elemanlardan temel taşıyıcı olan yığma duvarlar ve malzeme karakteristiklerinin araştırılması
 Yığma yapı elemanları ve bu elemanlardan temel taşıyıcı olan yığma duvarlar ve malzeme karakteristiklerinin araştırılması Farklı sonlu eleman tipleri ve farklı modelleme teknikleri kullanılarak yığma duvarların
Yığma yapı elemanları ve bu elemanlardan temel taşıyıcı olan yığma duvarlar ve malzeme karakteristiklerinin araştırılması Farklı sonlu eleman tipleri ve farklı modelleme teknikleri kullanılarak yığma duvarların
CAEeda TM OM6 KANADI MODELLEME. EDA Tasarım Analiz Mühendislik
 CAEeda TM OM6 KANADI MODELLEME EDA Tasarım Analiz Mühendislik 1. Kapsam Kanat Sınırlarını Çizme Taban Kanat Profilinin Hücum ve Firar Kenarları Sınırlarını Çizme Kanat Profilini Dosyadan (.txt) Okuma Geometrik
CAEeda TM OM6 KANADI MODELLEME EDA Tasarım Analiz Mühendislik 1. Kapsam Kanat Sınırlarını Çizme Taban Kanat Profilinin Hücum ve Firar Kenarları Sınırlarını Çizme Kanat Profilini Dosyadan (.txt) Okuma Geometrik
L KESİTLİ KİRİŞTE KAYMA MERKEZİNİN ANSYS İLE VE DENEYSEL YOLLA BULUNMASI
 T.C DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ L KESİTLİ KİRİŞTE KAYMA MERKEZİNİN ANSYS İLE VE DENEYSEL YOLLA BULUNMASI BİTİRME PROJESİ KADİR BOZDEMİR PROJEYİ YÖNETEN PROF.
T.C DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ L KESİTLİ KİRİŞTE KAYMA MERKEZİNİN ANSYS İLE VE DENEYSEL YOLLA BULUNMASI BİTİRME PROJESİ KADİR BOZDEMİR PROJEYİ YÖNETEN PROF.
RÜZGAR YÜKÜNÜN BİR TİCARİ ARAÇ SERVİS KAPISINA OLAN ETKİLERİNİN İNCELENMESİ
 RÜZGAR YÜKÜNÜN BİR TİCARİ ARAÇ SERVİS KAPISINA OLAN ETKİLERİNİN İNCELENMESİ Melih Tuğrul, Serkan Er Hexagon Studio Araç Mühendisliği Bölümü OTEKON 2010 5. Otomotiv Teknolojileri Kongresi 07 08 Haziran
RÜZGAR YÜKÜNÜN BİR TİCARİ ARAÇ SERVİS KAPISINA OLAN ETKİLERİNİN İNCELENMESİ Melih Tuğrul, Serkan Er Hexagon Studio Araç Mühendisliği Bölümü OTEKON 2010 5. Otomotiv Teknolojileri Kongresi 07 08 Haziran
BİR OFİS İÇİN TERMAL KONFOR ANALİZİNİN HESAPLAMALI AKIŞKANLAR DİNAMİĞİ YÖNTEMİ İLE MODELLENMESİ VE SAYISAL ÇÖZÜMÜ
 BİR OFİS İÇİN TERMAL KONFOR ANALİZİNİN HESAPLAMALI AKIŞKANLAR DİNAMİĞİ YÖNTEMİ İLE MODELLENMESİ VE SAYISAL ÇÖZÜMÜ Hazırlayan : Kadir ÖZDEMİR No : 4510910013 Tarih : 25.11.2014 KONULAR 1. ÖZET...2 2. GİRİŞ.........3
BİR OFİS İÇİN TERMAL KONFOR ANALİZİNİN HESAPLAMALI AKIŞKANLAR DİNAMİĞİ YÖNTEMİ İLE MODELLENMESİ VE SAYISAL ÇÖZÜMÜ Hazırlayan : Kadir ÖZDEMİR No : 4510910013 Tarih : 25.11.2014 KONULAR 1. ÖZET...2 2. GİRİŞ.........3
ARAZİ ÖLÇMELERİ. Temel Ödev I: Koordinatları belirli iki nokta arasında ki yatay mesafenin
 Temel ödevler Temel ödevler, konum değerlerinin bulunması ve aplikasyon işlemlerine dair matematiksel ve geometrik hesaplamaları içeren yöntemlerdir. öntemlerin isimleri genelde temel ödev olarak isimlendirilir.
Temel ödevler Temel ödevler, konum değerlerinin bulunması ve aplikasyon işlemlerine dair matematiksel ve geometrik hesaplamaları içeren yöntemlerdir. öntemlerin isimleri genelde temel ödev olarak isimlendirilir.
MUKAVEMET Öğr. Gör. Fatih KURTULUŞ
 www.sakarya.edu.tr MUKAVEMET Öğr. Gör. Fatih KURTULUŞ www.sakarya.edu.tr 1. DÜŞEY YÜKLÜ KİRİŞLER Cisimlerin mukavemeti konusunun esas problemi, herhangi bir yapıya uygulanan bir kuvvetin oluşturacağı gerilme
www.sakarya.edu.tr MUKAVEMET Öğr. Gör. Fatih KURTULUŞ www.sakarya.edu.tr 1. DÜŞEY YÜKLÜ KİRİŞLER Cisimlerin mukavemeti konusunun esas problemi, herhangi bir yapıya uygulanan bir kuvvetin oluşturacağı gerilme
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
YER HİZMETLERİ VE RAMP - I. Öğr. Gör. Gülaçtı ŞEN
 YER HİZMETLERİ VE RAMP - I Öğr. Gör. Gülaçtı ŞEN Kokpit daha çok uçan araçların olmakla birlikte genelde bir aracın sürücüsünün bulunduğu bölüme verilen isimdir. Bu bölüm çoğunlukla aracın ön kısmında
YER HİZMETLERİ VE RAMP - I Öğr. Gör. Gülaçtı ŞEN Kokpit daha çok uçan araçların olmakla birlikte genelde bir aracın sürücüsünün bulunduğu bölüme verilen isimdir. Bu bölüm çoğunlukla aracın ön kısmında
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
ANOVA MÜHENDİSLİK LTD. ŞTİ.
 ÇOK KADEMELİ POMPA PERFORMANSININ CFD YÖNTEMİYLE BELİRLENMESİ Ahmet AÇIKGÖZ Mustafa GELİŞLİ Emre ÖZTÜRK ANOVA MÜHENDİSLİK LTD. ŞTİ. KISA ÖZET Bu çalışmada dört kademeli bir pompanın performansı Hesaplamalı
ÇOK KADEMELİ POMPA PERFORMANSININ CFD YÖNTEMİYLE BELİRLENMESİ Ahmet AÇIKGÖZ Mustafa GELİŞLİ Emre ÖZTÜRK ANOVA MÜHENDİSLİK LTD. ŞTİ. KISA ÖZET Bu çalışmada dört kademeli bir pompanın performansı Hesaplamalı
4. Çok büyük ve çok küçük pozitif sayıları bilimsel gösterimle ifade eder.
 LENDİRME ŞEMASI ÜNİTE Üslü 1. Bir tam sayının negatif kuvvetini belirler ve rasyonel sayı olarak ifade eder.. Ondalık kesirlerin veya rasyonel sayıların kendileriyle tekrarlı çarpımını üslü sayı olarak
LENDİRME ŞEMASI ÜNİTE Üslü 1. Bir tam sayının negatif kuvvetini belirler ve rasyonel sayı olarak ifade eder.. Ondalık kesirlerin veya rasyonel sayıların kendileriyle tekrarlı çarpımını üslü sayı olarak
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
YAPILARDA BURULMA DÜZENSİZLİĞİ
 YAPILARDA BURULMA DÜZENSİZLİĞİ M. Sami DÖNDÜREN a Adnan KARADUMAN a M. Tolga ÇÖĞÜRCÜ a Mustafa ALTIN b a Selçuk Üniversitesi Mühendislik Mimarlık Fakültesi İnşaat Mühendisliği Bölümü Konya b Selçuk Üniversitesi
YAPILARDA BURULMA DÜZENSİZLİĞİ M. Sami DÖNDÜREN a Adnan KARADUMAN a M. Tolga ÇÖĞÜRCÜ a Mustafa ALTIN b a Selçuk Üniversitesi Mühendislik Mimarlık Fakültesi İnşaat Mühendisliği Bölümü Konya b Selçuk Üniversitesi
2. KUVVET SİSTEMLERİ 2.1 Giriş
 2. KUVVET SİSTEMLERİ 2.1 Giriş Kuvvet: Şiddet (P), doğrultu (θ) ve uygulama noktası (A) ile karakterize edilen ve bir cismin diğerine uyguladığı itme veya çekme olarak tanımlanabilir. Bu parametrelerden
2. KUVVET SİSTEMLERİ 2.1 Giriş Kuvvet: Şiddet (P), doğrultu (θ) ve uygulama noktası (A) ile karakterize edilen ve bir cismin diğerine uyguladığı itme veya çekme olarak tanımlanabilir. Bu parametrelerden
Doç. Dr. Bilge DORAN
 Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
SONLU FARKLAR GENEL DENKLEMLER
 SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
ARAZİ ÖLÇMELERİ. Koordinat sistemleri. Kartezyen koordinat sistemi
 Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
MANYETİK ALAN KAYNAKLARI Biot Savart Yasası
 Fiz 1012 Ders 6 MANYETİK ALAN KAYNAKLARI Biot Savart Yasası Hareket Eden Parçacığın Manyetik Alanı Akım Taşıyan İletkenin Manyetik Alanı Ampère Yasası Manyetik Akı Gauss Yasası Yerdeğiştirme Akımı (Ampère
Fiz 1012 Ders 6 MANYETİK ALAN KAYNAKLARI Biot Savart Yasası Hareket Eden Parçacığın Manyetik Alanı Akım Taşıyan İletkenin Manyetik Alanı Ampère Yasası Manyetik Akı Gauss Yasası Yerdeğiştirme Akımı (Ampère
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
İTKİLİ MOTORLU UÇAĞIN YATAY UÇUŞ HIZI
 İTKİLİ MOTORLU UÇAĞIN YATAY UÇUŞ HIZI Mustafa Cavcar Anadolu Üniversitesi Havacılık ve Uzay Bilimleri Fakültesi 26470 Eskişehir Yatay uçuş sabit uçuş irtifaında yeryüzüne paralel olarak yapılan uçuştur.
İTKİLİ MOTORLU UÇAĞIN YATAY UÇUŞ HIZI Mustafa Cavcar Anadolu Üniversitesi Havacılık ve Uzay Bilimleri Fakültesi 26470 Eskişehir Yatay uçuş sabit uçuş irtifaında yeryüzüne paralel olarak yapılan uçuştur.
Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü. Ders içeriği
 ANTENLER Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü Ders içeriği BÖLÜM 1: Antenler BÖLÜM 2: Antenlerin Temel Parametreleri BÖLÜM 3: Lineer Tel Antenler BÖLÜM 4: Halka Antenler
ANTENLER Doç. Dr. Sabri KAYA Erciyes Üni. Müh. Fak. Elektrik-Elektronik Müh. Bölümü Ders içeriği BÖLÜM 1: Antenler BÖLÜM 2: Antenlerin Temel Parametreleri BÖLÜM 3: Lineer Tel Antenler BÖLÜM 4: Halka Antenler
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ
 BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI Tanım
 2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI 2.1. Tanım Regresyon analizi, bir değişkenin başka bir veya daha fazla değişkene olan bağımlılığını inceler. Amaç, bağımlı değişkenin kitle ortalamasını, açıklayıcı
2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI 2.1. Tanım Regresyon analizi, bir değişkenin başka bir veya daha fazla değişkene olan bağımlılığını inceler. Amaç, bağımlı değişkenin kitle ortalamasını, açıklayıcı
HİDROLİK. Yrd. Doç. Dr. Fatih TOSUNOĞLU
 HİDROLİK Yrd. Doç. Dr. Fatih TOSUNOĞLU Ders Hakkında Genel Bilgiler Görüşme Saatleri:---------- Tavsiye edilen kitaplar: 1-Hidrolik (Prof. Dr. B. Mutlu SÜMER, Prof. Dr. İstemi ÜNSAL. ) 2-Akışkanlar Mekaniği
HİDROLİK Yrd. Doç. Dr. Fatih TOSUNOĞLU Ders Hakkında Genel Bilgiler Görüşme Saatleri:---------- Tavsiye edilen kitaplar: 1-Hidrolik (Prof. Dr. B. Mutlu SÜMER, Prof. Dr. İstemi ÜNSAL. ) 2-Akışkanlar Mekaniği
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ
 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ MÜHENDİSLİKTE DENEYSEL METOTLAR II ZAMANA BAĞLI ISI İLETİMİ 1.Deneyin Adı: Zamana bağlı ısı iletimi. 2. Deneyin
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ MÜHENDİSLİKTE DENEYSEL METOTLAR II ZAMANA BAĞLI ISI İLETİMİ 1.Deneyin Adı: Zamana bağlı ısı iletimi. 2. Deneyin
1. HAFTA. Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler.
 1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
Okut. Yüksel YURTAY. İletişim : (264) Sayısal Analiz. Giriş.
 Sayısal Analiz. Giriş.") Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
LİNEER DALGA TEORİSİ. Page 1
 LİNEER DALGA TEORİSİ Giriş Dalgalar, gerçekte viskoz akışkan içinde, irregüler ve değişken geçirgenliğe sahip bir taban üzerinde ilerlerler. Ancak, çoğu zaman akışkan hareketi neredeyse irrotasyoneldir.
LİNEER DALGA TEORİSİ Giriş Dalgalar, gerçekte viskoz akışkan içinde, irregüler ve değişken geçirgenliğe sahip bir taban üzerinde ilerlerler. Ancak, çoğu zaman akışkan hareketi neredeyse irrotasyoneldir.
RÜZGAR ETKİLERİ (YÜKLERİ) (W)
 (W)") RÜZGAR ETKİLERİ (YÜKLERİ) (W) Çatılara etkiyen rüzgar yükleri TS EN 1991-1-4 den yararlanarak belirlenir. Rüzgar etkileri, yapı tipine, geometrisine ve yüksekliğine bağlı olarak önemli farklılıklar göstermektedir.
RÜZGAR ETKİLERİ (YÜKLERİ) (W) Çatılara etkiyen rüzgar yükleri TS EN 1991-1-4 den yararlanarak belirlenir. Rüzgar etkileri, yapı tipine, geometrisine ve yüksekliğine bağlı olarak önemli farklılıklar göstermektedir.
FLOWING FLUIDS and PRESSURE VARIATION
 4. FLOWING FLUIDS and PRESSURE VARIATION Akışkan Kinematiği Akışkan kinematiği, harekete neden olan kuvvet ve momentleri dikkate almaksızın, akışkan hareketinin tanımlanmasını konu alır. Yapı üzerindeki
4. FLOWING FLUIDS and PRESSURE VARIATION Akışkan Kinematiği Akışkan kinematiği, harekete neden olan kuvvet ve momentleri dikkate almaksızın, akışkan hareketinin tanımlanmasını konu alır. Yapı üzerindeki
6.12 Örnekler PROBLEMLER
 6.1 6. 6.3 6.4 6.5 6.6 6.7 Çok Parçalı Taşıyıcı Sistemler Kafes Sistemler Kafes Köprüler Kafes Çatılar Tam, Eksik ve Fazla Bağlı Kafes Sistemler Kafes Sistemler İçin Çözüm Yöntemleri Kafes Sistemlerde
6.1 6. 6.3 6.4 6.5 6.6 6.7 Çok Parçalı Taşıyıcı Sistemler Kafes Sistemler Kafes Köprüler Kafes Çatılar Tam, Eksik ve Fazla Bağlı Kafes Sistemler Kafes Sistemler İçin Çözüm Yöntemleri Kafes Sistemlerde
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
İÇİNDEKİLER. BÖLÜM 1 Değişkenler ve Grafikler 1. BÖLÜM 2 Frekans Dağılımları 37
 İÇİNDEKİLER BÖLÜM 1 Değişkenler ve Grafikler 1 İstatistik 1 Yığın ve Örnek; Tümevarımcı ve Betimleyici İstatistik 1 Değişkenler: Kesikli ve Sürekli 1 Verilerin Yuvarlanması Bilimsel Gösterim Anlamlı Rakamlar
İÇİNDEKİLER BÖLÜM 1 Değişkenler ve Grafikler 1 İstatistik 1 Yığın ve Örnek; Tümevarımcı ve Betimleyici İstatistik 1 Değişkenler: Kesikli ve Sürekli 1 Verilerin Yuvarlanması Bilimsel Gösterim Anlamlı Rakamlar
Dik koordinat sisteminde yatay eksen x ekseni (apsis ekseni), düşey eksen ise y ekseni (ordinat ekseni) dir.
, düşey eksen ise y ekseni (ordinat ekseni) dir.") ANALĐTĐK GEOMETRĐ 1. Analitik Düzlem Bir düzlemde dik kesişen iki sayı doğrusunun oluşturduğu sisteme analitik düzlem denir. Analitik düzlem, dik koordinat sistemi veya dik koordinat düzlemi olarak da
ANALĐTĐK GEOMETRĐ 1. Analitik Düzlem Bir düzlemde dik kesişen iki sayı doğrusunun oluşturduğu sisteme analitik düzlem denir. Analitik düzlem, dik koordinat sistemi veya dik koordinat düzlemi olarak da
5. Bölüm Uçuşun Esasları Kanatlar, Kuyruk Yüzeyleri
 5. Bölüm Uçuşun Esasları Kanatlar, Kuyruk Yüzeyleri 5.1- Uçağa etki eden temel kuvvetler 5.- Uçak Kanatlarının Tipik Geometrisi 5.3- Taşımanın Oluşumu 5.4- Taşıma Katsayısı 5.5- Yerel taşıma. Veter ve
5. Bölüm Uçuşun Esasları Kanatlar, Kuyruk Yüzeyleri 5.1- Uçağa etki eden temel kuvvetler 5.- Uçak Kanatlarının Tipik Geometrisi 5.3- Taşımanın Oluşumu 5.4- Taşıma Katsayısı 5.5- Yerel taşıma. Veter ve
Elektrik ve Magnetizma
 Elektrik ve Magnetizma 1.1. Biot-Sawart yasası Üzerinden akım geçen, herhangi bir biçime sahip iletken bir tel tarafından bir P noktasında üretilen magnetik alan şiddeti H iletkeni oluşturan herbir parçanın
Elektrik ve Magnetizma 1.1. Biot-Sawart yasası Üzerinden akım geçen, herhangi bir biçime sahip iletken bir tel tarafından bir P noktasında üretilen magnetik alan şiddeti H iletkeni oluşturan herbir parçanın
INM 305 Zemin Mekaniği
 Hafta_8 INM 305 Zemin Mekaniği Zeminlerde Gerilme ve Dağılışı Yrd.Doç.Dr. İnan KESKİN inankeskin@karabuk.edu.tr, inankeskin@gmail.com Haftalık Konular Hafta 1: Zeminlerin Oluşumu Hafta 2: Hafta 3: Hafta
Hafta_8 INM 305 Zemin Mekaniği Zeminlerde Gerilme ve Dağılışı Yrd.Doç.Dr. İnan KESKİN inankeskin@karabuk.edu.tr, inankeskin@gmail.com Haftalık Konular Hafta 1: Zeminlerin Oluşumu Hafta 2: Hafta 3: Hafta
MAKİNE ELEMANLARI DERS SLAYTLARI
 MAKİNE ELEMANLARI DERS SLAYTLARI YORULMA P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L İ HOĞ LU Aloha Havayolları Uçuş 243: Hilo dan Honolulu
MAKİNE ELEMANLARI DERS SLAYTLARI YORULMA P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L İ HOĞ LU Aloha Havayolları Uçuş 243: Hilo dan Honolulu
SÜRÜKLEME DENEYİ TEORİ
 SÜRÜKLEME DENEYİ TEORİ Sürükleme kuvveti akışa maruz kalan cismin akışkan ile etkileşimi ve teması sonucu oluşan akış yönündeki kuvvettir.sürükleme kuvveti yüzey sürtünmesi,basınç ve taşıma kuvvetinden
SÜRÜKLEME DENEYİ TEORİ Sürükleme kuvveti akışa maruz kalan cismin akışkan ile etkileşimi ve teması sonucu oluşan akış yönündeki kuvvettir.sürükleme kuvveti yüzey sürtünmesi,basınç ve taşıma kuvvetinden
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
23. Sistem denge denklemlerinin direkt kurulması
 . Sistem denge denklemlerinin direkt kurulması. Sistem denge denklemlerinin direkt kurulması Sonlu elemanlar metodu el hesapları için değil, bilgisayarda yazılımlar ile kullanılması için geliştirilmiştir.
. Sistem denge denklemlerinin direkt kurulması. Sistem denge denklemlerinin direkt kurulması Sonlu elemanlar metodu el hesapları için değil, bilgisayarda yazılımlar ile kullanılması için geliştirilmiştir.
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
7. BÖLÜM İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI .= 1 1 + + Genel: Vektörler bölümünde vektörel iç çarpım;
 İÇ ÇARPIM UZAYLARI 7. BÖLÜM İÇ ÇARPIM UZAYLARI Genel: Vektörler bölümünde vektörel iç çarpım;.= 1 1 + + Açıklanmış ve bu konu uzunluk ve uzaklık kavramlarını açıklamak için kullanılmıştır. Bu bölümde öklit
İÇ ÇARPIM UZAYLARI 7. BÖLÜM İÇ ÇARPIM UZAYLARI Genel: Vektörler bölümünde vektörel iç çarpım;.= 1 1 + + Açıklanmış ve bu konu uzunluk ve uzaklık kavramlarını açıklamak için kullanılmıştır. Bu bölümde öklit