OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
|
|
|
- Nergis Aydan
- 8 yıl önce
- İzleme sayısı:
Transkript
1 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI

2 BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2

3 BLOK DİYAGRAM İNDİRGEME KURALLARI 1) Ardışık Bağlı Bloklar 2) Paralel Bağlı Bloklar 3) Geri Beslemeli Bloklar 3
 Geri Beslemeli")
4 BLOK DİYAGRAM İNDİRGEME KURALLARI 4) Toplama noktasını bir bloğun önüne kaydırma 5) Toplama noktasını bir bloğun arkasına kaydırma 6) Ayrılma noktasını bir bloğun önüne kaydırma 4
 Ayrılma noktasını bir bloğun")
5 BLOK DİYAGRAM İNDİRGEME KURALLARI 7) Ayrılma noktasını bir bloğun arkasına kaydırma 8) Ayrılma noktasını bir toplama noktasının önüne kaydırma 9) Ayrılma noktasını bir toplama noktasının önüne kaydırma 5

6 BLOK DİYAGRAM İNDİRGEME KURALLARI 10) Toplama noktalarının yeniden düzenlenmesi 6

7 BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? Sırasıyla Kural 6, 1, 2 ve 7 uygulayalım. 7

8 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH

9 İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları ve ayrılma noktaları içeren blok diyagramların tersine, işaret akış diyagramları sadece sistemleri temsil eden dallar ve işaretleri temsil eden düğümler içerir. Bir sistem, üzerinde işaret akış yönünü gösteren ok bulunan bir dal ile temsil edilir. Dal üzerinde sistemin transfer fonksiyonu bulunur. Bir işaret ise bir düğümle temsil edilir ve ismi düğüm üzerine yazılır. Bir işaret akış diyagramı bir blok diyagramın basitleştirilmiş hali olarak düşünülebilir. İşaret akış diyagramı doğrusal sistemlerde cebirsel denklemlerin neden-etki ilişkisini gösterebilmek için S. J. Mason tarafından geliştirilmiştir. Blok diyagramları ile lineer sistemler kolaylıkla modellenebilir. S domenine geçildiğinde sistem diferansiyel denklemleri s in polinomları olan cebirsel sistemlere dönüşür. Karmaşık sistemlerde blok diyagramlarını indirgemek zor ve zaman alıcı olabilir. Ayrıca blok diyagramları arasındaki işaret akışı net olarak görülemeyebilir. İşaret akış diyagramları, blok diyagramları gibi sistemin neden sonuç ilişkisini gösteren ancak daha basit bir inceleme yöntemidir. 9

10 İŞARET AKIŞ DİYAGRAMLARININ ÖZELLİKLERİ Bir kol (dal) üzerinden işaret ancak ok yönünde geçer. Bir düğüm kendisine gelen tüm kolların (dalların) işaretlerini toplar ve kendinden ayrılan kola (dala) aktarır. Verilen bir sistem için işaret akış grafiği tek değildir. Farklı matematiksel ifadeler ile farklı akış diyagramları çizilebilir. İşaret Akış Diyagramlarının Avantajları : İşaretin girişi, işaretin akışı ve sistem çıkışı daha açık gösterilir. İndirgeme işlemi blok diyagramlarına göre daha kolaydır. 10 Çoğu zaman kazanç formülü kullanılarak diyagramı indirgemeden bile durum değişkenleri arasındaki bağıntı belirlenir.

11 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI Düğüm : Bir değişken veya işareti gösteren nokta, Geçiş fonksiyonu : İki düğüm arasındaki kazanç (Transfer fonksiyonu), Kol (Dal) : İki düğümü birleştiren yönlendirilmiş çizgi, Yol : Oklar yönünde gidilerek geçilen kolların grubu, Açık yol : Düğümlerden bir defadan fazla geçmeyen yol, Kapalı yol : Bağlandığı düğüme geri dönen veya diğer herhangi bir düğümden geçmeyen yol, Döngü : Kapalı bir yol, Bağımsız döngü : Ortak düğümlere sahip olmayan döngü, 11

12 12 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI

13 13 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI

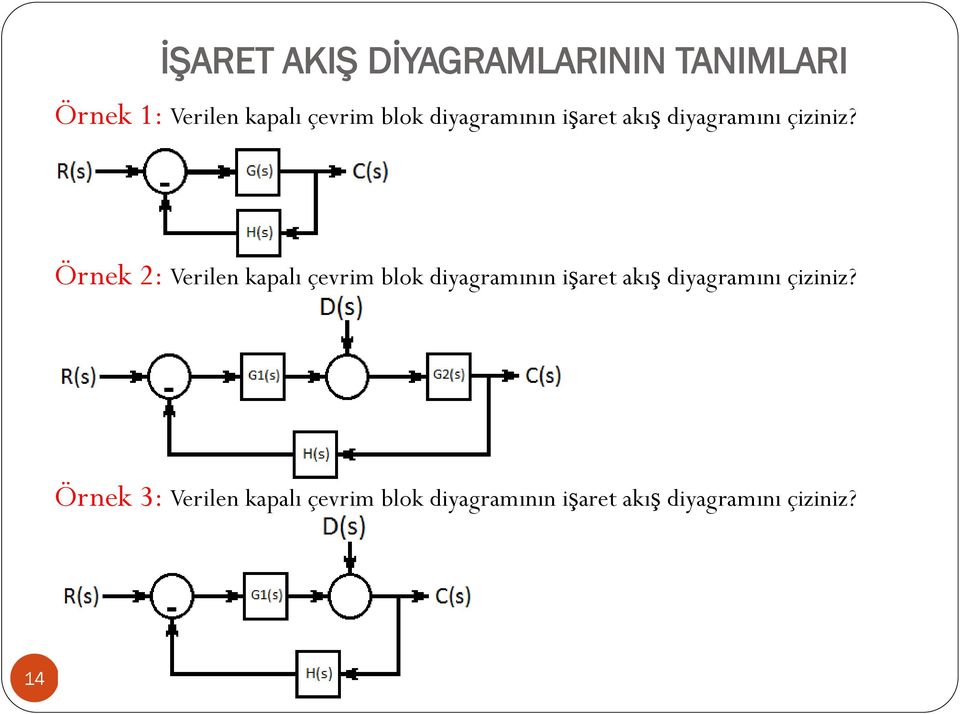
14 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI Örnek 1: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? Örnek 2: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? Örnek 3: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? 14
15 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Bir giriş düğümü ile bir çıkış düğümü arasındaki kazanç, bu iki düğüm arasındaki toplam kazanç ve toplam geçiş fonksiyonudur. Toplam kazanç için aşağıdaki Mason kazanç formülü uygulanabilir. N adet ileri yolu ve L adet döngüsü bulunan bir akış diyagramı verildiğinde R(s) giriş düğümü ile C(s) çıkış düğümü arasındaki kazanç yanda verilen formül ile bulunur. Bu formüle Mason kazanç formülü adı verilir. Burada, n : Toplam ileri yol sayısı, Pk : Giriş ile çıkış arasında var olan ileri yollardan k. sının ileri yol kazancı, T(s) : Giriş ile çıkış arasındaki toplam kazanç, : 1 ( Tüm farklı döngü kazançlarının toplamı ) + (Mümkün olabilen ikili temassız döngülerin = kazançları çarpımının toplamı) (Mümkün olabilen üçlü temassız döngülerin kazançları çarpımının toplamı) κ : k. Cı ileri yolun kaldırılması ile elde edilen diyagramın sı yada Pk nın kofaktörü.

16 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Örnek 1: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? İşaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? Örnek 2: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? İşaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? 16

OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Ders İçerik Bilgisi. Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Elastisite Teorisi Düzlem Problemleri için Sonuç 1
 Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
KST Lab. Manyetik Top Askı Sistemi Deney Föyü
 KST Lab. Manyetik Top Askı Sistemi Deney Föyü. Deney Düzeneği Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada
KST Lab. Manyetik Top Askı Sistemi Deney Föyü. Deney Düzeneği Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Chapter 9. Elektrik Devreleri. Principles of Electric Circuits, Conventional Flow, 9 th ed. Floyd
 Elektrik Devreleri Eşanlı Denklemler Bölüm 9 daki devre analizi yöntemleri eşanlı (paralel) denklem kullanımını gerektirmektedir. Eşanlı denklemlerin çözümünü basitleştirmek için, denklemler genelde standart
Elektrik Devreleri Eşanlı Denklemler Bölüm 9 daki devre analizi yöntemleri eşanlı (paralel) denklem kullanımını gerektirmektedir. Eşanlı denklemlerin çözümünü basitleştirmek için, denklemler genelde standart
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
CEVAP ANAHTARI 1-A 2-C 3-A 4-D 5-D 6-E 7-A 8-E 9-D 10-D 11-C 12-B 13-E 14-E 15-E 16-A 17-D 18-B
 1. BÖLÜM: TEMEL KAVRAMLAR - 3 1-A 2-C 3-A 4-D 5-D 6-E 7-A 8-E 9-D 10-D 11-C 12-B 13-E 14-E 15-E 16-A 17-D 18-B 1-D 2-B 3-B 4-E 5-C 6-D 7-C 8-E 9-B 10-A 11-C 12-E 13-C 14-D 15-E 16-D 1-A 2-B 3-A 4-E 5-A
1. BÖLÜM: TEMEL KAVRAMLAR - 3 1-A 2-C 3-A 4-D 5-D 6-E 7-A 8-E 9-D 10-D 11-C 12-B 13-E 14-E 15-E 16-A 17-D 18-B 1-D 2-B 3-B 4-E 5-C 6-D 7-C 8-E 9-B 10-A 11-C 12-E 13-C 14-D 15-E 16-D 1-A 2-B 3-A 4-E 5-A
Kontrol Sistemleri (EE 326) Ders Detayları
 Ders Detayları") Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
 değiştirdiğini gösterir. Marjinal Hasıla Bir malın satışından elde edilen toplam hasıla (TR), malın fiyatı (P) ile satılan mal miktarının (Q) çarpımına eşittir: Toplam hasıla fonksiyonu monopol piyasasında
değiştirdiğini gösterir. Marjinal Hasıla Bir malın satışından elde edilen toplam hasıla (TR), malın fiyatı (P) ile satılan mal miktarının (Q) çarpımına eşittir: Toplam hasıla fonksiyonu monopol piyasasında
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Koordinat sistemi. Eksenlere paralel doğrular: y eksenine paralel doğrular. Koordinat ekseninde doğrular. Çanta. Kalem. Doğru
 Koordinat sistemi Koordinat ekseninde doğrular Eksenlere paralel doğrular: y eksenine paralel doğrular Çanta Kalem Doğru Söylediğimiz somut nesnelerin resmini çizebildiğimiz gibi cebirsel ifadelerinde
Koordinat sistemi Koordinat ekseninde doğrular Eksenlere paralel doğrular: y eksenine paralel doğrular Çanta Kalem Doğru Söylediğimiz somut nesnelerin resmini çizebildiğimiz gibi cebirsel ifadelerinde
Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma TEST D 9. E 10. C 11. B 14. D 16. D 12. C 12. A 13. B 14.
 1. Ünite: Polinomlar Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Polinomlarda Bölme, Bölüm ve Kalan Bulma 1 1 1 1 1 1 1 1 1
1. Ünite: Polinomlar Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Polinomlarda Bölme, Bölüm ve Kalan Bulma 1 1 1 1 1 1 1 1 1
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
BÖLÜM III: Şebeke Modelleri. Şebeke Kavramları. Şebeke Kavramları. Şebeke Kavramları. Yönlü Şebeke (Directed Network) Dal / ok
 Dal / ok") 8.0.0 Şebeke Kavramları BÖLÜM III: Şebeke Modelleri Şebeke (Network) Sonlu sayıdaki düğümler kümesiyle, bunlarla bağlantılı oklar (veya dallar) kümesinin oluşturduğu yapı şeklinde tanımlanabilir ve (N,A)
8.0.0 Şebeke Kavramları BÖLÜM III: Şebeke Modelleri Şebeke (Network) Sonlu sayıdaki düğümler kümesiyle, bunlarla bağlantılı oklar (veya dallar) kümesinin oluşturduğu yapı şeklinde tanımlanabilir ve (N,A)
İÇİNDEKİLER. Bölüm 1 MATEMATİKSEL İKTİSADA GİRİŞ 11 1.1.İktisat Hakkında 12 1.2.İktisatta Grafik ve Matematik Kullanımı 13
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 MATEMATİKSEL İKTİSADA GİRİŞ 11 1.1.İktisat Hakkında 12 1.2.İktisatta Grafik ve Matematik Kullanımı 13 Bölüm 2 STATİK DENGE ANALİZİ 19 2.1 İktisatta Denge Kavramı 20 2.1.1.
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 MATEMATİKSEL İKTİSADA GİRİŞ 11 1.1.İktisat Hakkında 12 1.2.İktisatta Grafik ve Matematik Kullanımı 13 Bölüm 2 STATİK DENGE ANALİZİ 19 2.1 İktisatta Denge Kavramı 20 2.1.1.
Proje Adı: Sonlu Bir Aritmetik Dizinin Terimlerinin Kuvvetleri Toplamının İndirgeme Bağıntısıyla Bulunması.
 Proje Adı: Sonlu Bir Aritmetik Dizinin Terimlerinin Kuvvetleri Toplamının İndirgeme Bağıntısıyla Bulunması. Projenin Amacı: Aritmetik bir dizinin ilk n-teriminin belirli tam sayı kuvvetleri toplamının
Proje Adı: Sonlu Bir Aritmetik Dizinin Terimlerinin Kuvvetleri Toplamının İndirgeme Bağıntısıyla Bulunması. Projenin Amacı: Aritmetik bir dizinin ilk n-teriminin belirli tam sayı kuvvetleri toplamının
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma
 Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
4. Sunum: AC Kalıcı Durum Analizi. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
7. BÖLÜM BARA ADMİTANS VE BARA EMPEDANS MATRİSLERİ
 5 7. BÖLÜM ADMİTANS E EMPEDANS MATRİSLERİ 7.. Giriş İletim sistemlerinin analizlerinde, bara sayısı arttıkça artan karmaşıklıkları yenmek için sistemin matematiksel modellenmesinde kolaylık getirici bazı
5 7. BÖLÜM ADMİTANS E EMPEDANS MATRİSLERİ 7.. Giriş İletim sistemlerinin analizlerinde, bara sayısı arttıkça artan karmaşıklıkları yenmek için sistemin matematiksel modellenmesinde kolaylık getirici bazı
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") 1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Öğr. Gör. Serkan AKSU
 Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
İÇİNDEKİLER. Bölüm 2 CEBİR 43
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
İstatistik ve Olasılık
 İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
Lineer Programlama. Doğrusal terimi, hem amaç hem de kısıtları temsil eden matematiksel fonksiyonların doğrusal olduğunu gösterir.
 LİNEER PROGRAMLAMA Giriş Uygulamada karşılaşılan birçok optimizasyon problemi kısıtlar içerir. Yani optimizasyon probleminde amaç fonksiyonuna ilave olarak çözümü kısıtlayıcı ek denklemler mevcuttur. Bu
LİNEER PROGRAMLAMA Giriş Uygulamada karşılaşılan birçok optimizasyon problemi kısıtlar içerir. Yani optimizasyon probleminde amaç fonksiyonuna ilave olarak çözümü kısıtlayıcı ek denklemler mevcuttur. Bu
Alıştırmalar 1. 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.
 Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.") Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
Örnek. Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız.
 Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
MATLAB a GİRİŞ. Doç. Dr. Mehmet İTİK. Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü
 MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
SONLU FARKLAR GENEL DENKLEMLER
 SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
ÇOKLU ALT SİSTEMLERİN SADELEŞTİRİLMESİ
 73 BÖLÜM 5 ÇOKLU ALT SİSTEMLERİN SADELEŞTİRİLMESİ 5. Blok Diyagramları Blok diyagramları genellikle frekan domenindeki analizlerde kullanılır. Şekil 5. de çoklu alt-itemlerde kullanılan blok diyagramları
73 BÖLÜM 5 ÇOKLU ALT SİSTEMLERİN SADELEŞTİRİLMESİ 5. Blok Diyagramları Blok diyagramları genellikle frekan domenindeki analizlerde kullanılır. Şekil 5. de çoklu alt-itemlerde kullanılan blok diyagramları
Şekil 1. Geri beslemeli yükselteçlerin genel yapısı
 DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
BÖLÜNMÜŞ FARKLAR (DİVİDED DİFFERENCES)
") BÖLÜNMÜŞ FARKLAR (DİVİDED DİFFERENCES) Lagrange ve Neville yöntemlerinin bazı olumsuz yanları vardır: İşlem sayısı çok fazladır (bazı başka yöntemlere kıyasla) Data setinde bir nokta ilavesi veya çıkartılması
BÖLÜNMÜŞ FARKLAR (DİVİDED DİFFERENCES) Lagrange ve Neville yöntemlerinin bazı olumsuz yanları vardır: İşlem sayısı çok fazladır (bazı başka yöntemlere kıyasla) Data setinde bir nokta ilavesi veya çıkartılması
Anahtarlama Modlu DA-AA Evirici
 Anahtarlama Modlu DA-AA Evirici Giriş Anahtarlama modlu eviricilerde temel kavramlar Bir fazlı eviriciler Üç fazlı eviriciler Ölü zamanın PWM eviricinin çıkış gerilimine etkisi Diğer evirici anahtarlama
Anahtarlama Modlu DA-AA Evirici Giriş Anahtarlama modlu eviricilerde temel kavramlar Bir fazlı eviriciler Üç fazlı eviriciler Ölü zamanın PWM eviricinin çıkış gerilimine etkisi Diğer evirici anahtarlama
Jşaret Akışı Diyagramları ile Devrelerin Analizi UDK: 621.3.012 Necdet ŞEN Y. Müh. Mu. Ok.
 Jşaret Akışı Diyagramları ile Devrelerin Analizi UDK: 621.3.012 Necdet ŞEN Y. Müh. Mu. Ok. ÖZET : Bu yazıda işaret akısı diyagramlarının çizilmesi, basitleştirilmesi, elektrik devrelerine uygulanışı, Mason
Jşaret Akışı Diyagramları ile Devrelerin Analizi UDK: 621.3.012 Necdet ŞEN Y. Müh. Mu. Ok. ÖZET : Bu yazıda işaret akısı diyagramlarının çizilmesi, basitleştirilmesi, elektrik devrelerine uygulanışı, Mason
Genel Matematik (MATH 103) Ders Detayları
 Ders Detayları") Genel Matematik (MATH 103) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Genel Matematik MATH 103 Güz 3 2 0 4 6 Ön Koşul Ders(ler)i - Dersin Dili Dersin
Genel Matematik (MATH 103) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Genel Matematik MATH 103 Güz 3 2 0 4 6 Ön Koşul Ders(ler)i - Dersin Dili Dersin
Bir Doğrusal Programlama Modelinin Genel Yapısı
 Bir Doğrusal Programlama Modelinin Genel Yapısı Amaç Fonksiyonu Kısıtlar M i 1 N Z j 1 N j 1 a C j x j ij x j B i Karar Değişkenleri x j Pozitiflik Koşulu x j >= 0 Bu formülde kullanılan matematik notasyonların
Bir Doğrusal Programlama Modelinin Genel Yapısı Amaç Fonksiyonu Kısıtlar M i 1 N Z j 1 N j 1 a C j x j ij x j B i Karar Değişkenleri x j Pozitiflik Koşulu x j >= 0 Bu formülde kullanılan matematik notasyonların
Bölüm 4 KAPALI SİSTEMLERİN ENERJİ ANALİZİ. Bölüm 4: Kapalı Sistemlerin Enerji Analizi
 Bölüm 4 KAPALI SİSTEMLERİN ENERJİ ANALİZİ 1 Amaçlar Özellikle otomobil motoru ve kompresör gibi pistonlu makinelerde yaygın olarak karşılaşılan hareketli sınır işi veya PdV işi olmak üzere değişik iş biçimlerinin
Bölüm 4 KAPALI SİSTEMLERİN ENERJİ ANALİZİ 1 Amaçlar Özellikle otomobil motoru ve kompresör gibi pistonlu makinelerde yaygın olarak karşılaşılan hareketli sınır işi veya PdV işi olmak üzere değişik iş biçimlerinin
Bahar Yarıyılı D_IFERANS_IYEL DENKLEMLER II ARA SINAV 6 Nisan 2011 Süre: 90 dakika CEVAP ANAHTARI. y = c n x n+r. (n + r) c n x n+r 1 +
 c n x n+r 1 +") DÜZCE ÜN_IVERS_ITES_I FEN-EDEB_IYAT FAKÜLTES_I MATEMAT_IK BÖLÜMÜ 010-011 Bahar Yarıyılı D_IFERANS_IYEL DENKLEMLER II ARA SINAV 6 Nisan 011 Süre: 90 dakika CEVAP ANAHTARI 1. 0p x d y + dy + xy = 0 diferansiyel
DÜZCE ÜN_IVERS_ITES_I FEN-EDEB_IYAT FAKÜLTES_I MATEMAT_IK BÖLÜMÜ 010-011 Bahar Yarıyılı D_IFERANS_IYEL DENKLEMLER II ARA SINAV 6 Nisan 011 Süre: 90 dakika CEVAP ANAHTARI 1. 0p x d y + dy + xy = 0 diferansiyel
ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV. ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV
 Türev 2) Türev Uygulamaları TÜREV") - 1 - ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV Kazanım 1 : Türev Kavramını fiziksel ve geometrik uygulamalar yardımıyla açıklar, türevin tanımını
- 1 - ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV Kazanım 1 : Türev Kavramını fiziksel ve geometrik uygulamalar yardımıyla açıklar, türevin tanımını
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
DOĞRUSAL DENKLEMLER VE KOORDİNAT SİSTEMİ
 DOĞRUSAL DENKLEMLER VE KOORDİNAT SİSTEMİ Örnek : Taksi ile yapılan yolculukların ücreti taksimetre ile belirlenir Bir taksimetrenin açılış ücreti 2 TL, sonraki her kilometre başına 1 TL ücret ödendiğine
DOĞRUSAL DENKLEMLER VE KOORDİNAT SİSTEMİ Örnek : Taksi ile yapılan yolculukların ücreti taksimetre ile belirlenir Bir taksimetrenin açılış ücreti 2 TL, sonraki her kilometre başına 1 TL ücret ödendiğine
Çukurova Üniversitesi Biyomedikal Mühendisliği
 Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuarı Deney Föyü Deney#6 İşlemsel Kuvvetlendiriciler (OP-AMP) - 2 Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY
Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuarı Deney Föyü Deney#6 İşlemsel Kuvvetlendiriciler (OP-AMP) - 2 Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY
İkinci Mertebeden Lineer Diferansiyel Denklemler
 A(x)y + B(x)y + C(x)y = F (x) (5) Denklem (5) in sağ tarafında bulunan F (x) fonksiyonu, I aralığı üzerinde sıfıra özdeş ise, (5) denklemine lineer homogen; aksi taktirde lineer homogen olmayan denklem
A(x)y + B(x)y + C(x)y = F (x) (5) Denklem (5) in sağ tarafında bulunan F (x) fonksiyonu, I aralığı üzerinde sıfıra özdeş ise, (5) denklemine lineer homogen; aksi taktirde lineer homogen olmayan denklem
Çukurova Üniversitesi Biyomedikal Mühendisliği
 Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuvarı Deney Föyü Deney#10 Analog Aktif Filtre Tasarımı Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY 10 Analog
Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuvarı Deney Föyü Deney#10 Analog Aktif Filtre Tasarımı Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY 10 Analog
d) x - y = 0 e) 5x -3y = 0 f) 4x -2y = 0 g) 2x +5y = 0
 x - y = 0 e) 5x -3y = 0 f) 4x -2y = 0 g) 2x +5y = 0") Koordinat sistemi Orijinden geçen doğrular Aşağıda koordinat sisteminde orijinden geçen doğruyu inceleyelim. Tanım: Orijinden geçen doğrular eksenlere dokunmaz. Orijin bir nokta olduğu için sonsuz doğru
Koordinat sistemi Orijinden geçen doğrular Aşağıda koordinat sisteminde orijinden geçen doğruyu inceleyelim. Tanım: Orijinden geçen doğrular eksenlere dokunmaz. Orijin bir nokta olduğu için sonsuz doğru
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Öğr. Elemanı: Dr. Mustafa Cumhur AKBULUT
 Ünite 10: Regresyon Analizi Öğr. Elemanı: Dr. Mustafa Cumhur AKBULUT 10.Ünite Regresyon Analizi 2 Ünitede Ele Alınan Konular 10. Regresyon Analizi 10.1. Basit Doğrusal regresyon 10.2. Regresyon denklemi
Ünite 10: Regresyon Analizi Öğr. Elemanı: Dr. Mustafa Cumhur AKBULUT 10.Ünite Regresyon Analizi 2 Ünitede Ele Alınan Konular 10. Regresyon Analizi 10.1. Basit Doğrusal regresyon 10.2. Regresyon denklemi
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
Programlama Giriş. 17 Ekim 2015 Cumartesi Yrd. Doç. Dr. Mustafa YANARTAŞ 1
 17 Ekim 2015 Cumartesi Yrd. Doç. Dr. Mustafa YANARTAŞ 1 Ders Not Sistemi Vize : % 40 Final : % 60 Kaynaklar Kitap : Algoritma Geliştirme ve Programlama Giriş Yazar: Dr. Fahri VATANSEVER Konularla ilgili
17 Ekim 2015 Cumartesi Yrd. Doç. Dr. Mustafa YANARTAŞ 1 Ders Not Sistemi Vize : % 40 Final : % 60 Kaynaklar Kitap : Algoritma Geliştirme ve Programlama Giriş Yazar: Dr. Fahri VATANSEVER Konularla ilgili
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Doğrusal Ara Değer Hesabı Lagrance Polinom İnterpolasyonu
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Doğrusal Ara Değer Hesabı Lagrance Polinom İnterpolasyonu
 ç ç Ö Ç Ş Ç ç Ç ç ç ç Ö ç Ç Ş ç ç Ş Ç Ş Ö Ö Ş ç Ö ç ç ç ç Ş Ö Ç Ç Ş ç ç Ş Ş Ş Ö ç ç ç ç Ö Ş Ç Ö Ö ç «Ö ç Ş ç Ç «ÇŞ Ş Ö Ç ç Ö ç Ç Ş Ö Ö ç ç ç Ö Ş Ö ç Ö ç Ç Ş Ç «ç Ö Ç Ş ç ç ç «ç Ç Ş Ö Ö Ç ç ç Ş ç ç Ö ç
ç ç Ö Ç Ş Ç ç Ç ç ç ç Ö ç Ç Ş ç ç Ş Ç Ş Ö Ö Ş ç Ö ç ç ç ç Ş Ö Ç Ç Ş ç ç Ş Ş Ş Ö ç ç ç ç Ö Ş Ç Ö Ö ç «Ö ç Ş ç Ç «ÇŞ Ş Ö Ç ç Ö ç Ç Ş Ö Ö ç ç ç Ö Ş Ö ç Ö ç Ç Ş Ç «ç Ö Ç Ş ç ç ç «ç Ç Ş Ö Ö Ç ç ç Ş ç ç Ö ç
 Ğ Ğ ş ç ş ç ç ç ş ç ç Ş ç «ş ş Ö Ş Ş ş ş ç Ö Ş ş Ü ç ç ş ş ş ç Ş ş ç ç ç ş ç ş ş ş ç ç ç ş Ç ş ş ç ş ç ş ş Ş ş ç ş ç ç ş ç ş ç ç ş ç ç ş Ü ş çş ş ş Çş Ç Ü çş ş Ç çş ç ş Ş Ö Ö ş ç ç ç ş ç ç ç ş ş ç ç ş
Ğ Ğ ş ç ş ç ç ç ş ç ç Ş ç «ş ş Ö Ş Ş ş ş ç Ö Ş ş Ü ç ç ş ş ş ç Ş ş ç ç ç ş ç ş ş ş ç ç ç ş Ç ş ş ç ş ç ş ş Ş ş ç ş ç ç ş ç ş ç ç ş ç ç ş Ü ş çş ş ş Çş Ç Ü çş ş Ç çş ç ş Ş Ö Ö ş ç ç ç ş ç ç ç ş ş ç ç ş
Otomatik Kontrol. Blok Diyagramlar ve İşaret Akış Diyagramları. Prof.Dr.Galip Cansever. Ders #3. 26 February 2007 Otomatik Kontrol
 Der # Otomatik Kontrol Blok Diyagramlar ve İşaret Akış Diyagramları ProfDralip Canever 6 February 007 Otomatik Kontrol ProfDralip Canever Karmaşık itemler bir çok alt itemin bir araya gelmeiyle oluşmuştur
Der # Otomatik Kontrol Blok Diyagramlar ve İşaret Akış Diyagramları ProfDralip Canever 6 February 007 Otomatik Kontrol ProfDralip Canever Karmaşık itemler bir çok alt itemin bir araya gelmeiyle oluşmuştur
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (4. Hafta)
") KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss
 Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss Jordan Yöntemi ve Uygulaması Performans Ölçümü 2 Bu çalışmada,
Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss Jordan Yöntemi ve Uygulaması Performans Ölçümü 2 Bu çalışmada,
Karar Verme ve Oyun Teorisi
 Karar Problemlerinin Modellenmesinde Kullanılan raçlar Karar Verme ve Oyun Teorisi Karar Problemlerinin Modellenmesinde Kullanılan raçlar Karmaşık karar problemlerinin anlaşılmasını kolaylaştırmak amacıyla,
Karar Problemlerinin Modellenmesinde Kullanılan raçlar Karar Verme ve Oyun Teorisi Karar Problemlerinin Modellenmesinde Kullanılan raçlar Karmaşık karar problemlerinin anlaşılmasını kolaylaştırmak amacıyla,
BÖLÜM 3: AKIŞ DİYAGRAMLARI
 BÖLÜM 3: AKIŞ DİYAGRAMLARI Geliştirilecek olan yazılımın genel yapısının şematik gösterimine akış diyagramı (flowchart) adı verilir. Akış diyagramları, yazılımı oluşturacak program parçalarını ve bu parçaların
BÖLÜM 3: AKIŞ DİYAGRAMLARI Geliştirilecek olan yazılımın genel yapısının şematik gösterimine akış diyagramı (flowchart) adı verilir. Akış diyagramları, yazılımı oluşturacak program parçalarını ve bu parçaların
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOULU
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOULU BMT109 SAYISAL ELEKTRONİK Öğr.Gör.Uğur YEDEKÇİOğLU Boolean İfadesinden Sayısal Devrelerin Çizilmesi Örnek : D = B+AC ifadesini lojik kapıları kullanarak çiziniz.
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOULU BMT109 SAYISAL ELEKTRONİK Öğr.Gör.Uğur YEDEKÇİOğLU Boolean İfadesinden Sayısal Devrelerin Çizilmesi Örnek : D = B+AC ifadesini lojik kapıları kullanarak çiziniz.
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Elektrik Devre Temelleri
 Elektrik Devre Temelleri 2. TEMEL KANUNLAR Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi Bu bölümde Ohm Kanunu Düğüm, dal, çevre 2.1. Giriş Kirchhoff Kanunları Paralel
Elektrik Devre Temelleri 2. TEMEL KANUNLAR Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi Bu bölümde Ohm Kanunu Düğüm, dal, çevre 2.1. Giriş Kirchhoff Kanunları Paralel
Algoritma ve Akış Diyagramları
 Algoritma ve Akış Diyagramları Bir problemin çözümüne ulaşabilmek için izlenecek ardışık mantık ve işlem dizisine ALGORİTMA, algoritmanın çizimsel gösterimine ise AKIŞ DİYAGRAMI adı verilir. 1 Akış diyagramları
Algoritma ve Akış Diyagramları Bir problemin çözümüne ulaşabilmek için izlenecek ardışık mantık ve işlem dizisine ALGORİTMA, algoritmanın çizimsel gösterimine ise AKIŞ DİYAGRAMI adı verilir. 1 Akış diyagramları
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
8. HAFTA ZAMANA BAĞLI ISI İLETİMİ
 8. HAFTA ZAMANA BAĞLI ISI İLETİMİ Fiziksel öneminin anlaşılması için Fourier sayısı Fourier sayısı, cisim içerisinde iletilen ısının, depolanan ısıya oranının bir ölçütüdür. Büyük Fourier sayısı değeri,
8. HAFTA ZAMANA BAĞLI ISI İLETİMİ Fiziksel öneminin anlaşılması için Fourier sayısı Fourier sayısı, cisim içerisinde iletilen ısının, depolanan ısıya oranının bir ölçütüdür. Büyük Fourier sayısı değeri,
İzostatik Sistemlerin Hareketli Yüklere Göre Hesabı
 İzostatik Sistemlerin Hareketli Yüklere Göre Hesabı Hareketli Yük Çeşitleri: a) I. tip hareketli yük: Sistemin tümünü veya bir bölümünü kaplayan, boyu değişken düzgün yayılı hareketli yüklerdir (insan,
İzostatik Sistemlerin Hareketli Yüklere Göre Hesabı Hareketli Yük Çeşitleri: a) I. tip hareketli yük: Sistemin tümünü veya bir bölümünü kaplayan, boyu değişken düzgün yayılı hareketli yüklerdir (insan,
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.