Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
|
|
|
- Eser Derviş
- 6 yıl önce
- İzleme sayısı:
Transkript
1 1 2 1
2 3 4 2
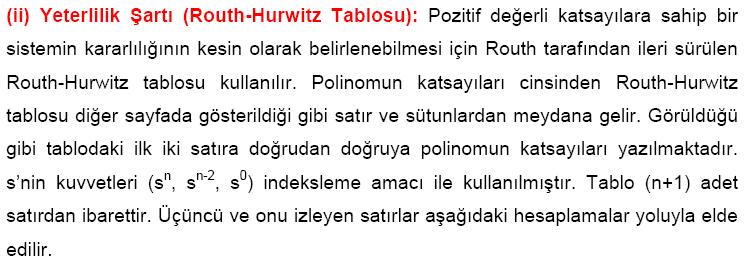
3 5 6 3
4 7 8 4
5 9 10 5
6
7 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7
8 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol Systems Engineering, 3/e 8
9 Örnek a. Kapalı çevrimli kontrole ait TF; b. eşdeğer Kapalı çevrimli sistemin TF Tamamlanmış Routh kararlılık tablosu 9
10 Table 6.4 Completed Routh table for Example , John Wiley & Sons, Inc. Nise/Control Systems Engineering, 3/e Table 6.5 Determining signs in first column of a Routh table with zero as first element in a row 2000, John Wiley & Sons, Inc. Nise/Control Systems Engineering, 3/e 10

11 Örnek
12

13 Örnek
14 27 Örnek 28 14
15

16 Örnek
17

18 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Transfer Fonksiyonu Modellerinin MATLAB ile Analizi s^3+3s^2+4 polinomunun kökleri roots komutu ile bulunur. Sonuçlar; r = i i Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Sistem transfer fonksiyonu tf komutu ile bulunur; Transfer fonksiyonu payı paydaya bölme, sonucu bölüm ve kalan olarak yazma işlemi değildir. Bir sistemin giriş/çıkış bağıntısını modelleyen sembolik bir gösterim biçimidir. Sonuçlar ; Transfer function: s^2 + 2 s + 5 Transfer function: s

19 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Art arda seri bağlı iki sistemin transfer fonksiyonlarının indirgenmesi, series komutuyla ya da * çarpım operatörüyle yapılır. Sonuç; Transfer function: s^3 + 3 s^2 + 7 s + 5 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Paralel bağlı iki sistem bloğunun indirgenmesi parallel komutu ya da + toplama operatörüyle yapılır. Sonuç; Transfer function: s^ s s^3 + 3 s^2 + 7 s
; burada işaret, geri bildirim negatif ise -1, pozitif ise +1 dir. işaret belirtilmediği takdirde negatif geri bildirime göre hesaplama yapılır.")
20 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Geri bildirim döngüsünün indirgenmesi feedback komutu ile yapılır. T=feedback (G,H,işaret); burada işaret, geri bildirim negatif ise -1, pozitif ise +1 dir. işaret belirtilmediği takdirde negatif geri bildirime göre hesaplama yapılır. Yukarıdaki gibi bir sistemde ileri yol G(s)= GD(s)*GDS(s), geri bildirim H(s), geri bildirimli sistemin transfer fonksiyonu T(s) dir. Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Sonuçlar; Transfer function: G= s s + 5 Kodu göster MatLab Transfer function: T= s^2 + 6 s s^4 + 7 s^ s^2 + 5 s

21 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Bir sistemin kutupları ve sıfırları sırasıyla pole ve zero komutlarıyla bulunur. Kutup ve sıfırları s karmaşık düzleminde çizdirmek için ise pzmap komutu kullanılır. Sonuçlar; sifirlar = i i kutuplar = Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu 42 21
22 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Kodu göster MatLab 43 Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri- MatLab) - Ders sorumlusu: Doç.Dr.Hilmi Kuşçu Kodu göster MatLab 44 22

23 Bitti 45 23
ELN3052 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - 2 TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI:
 ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
Bu uygulama saatinde, ders kapsamında şu ana kadar bahsedilen konulara ilişkin MATLAB fonksiyonları tanıtılacaktır.
 Bu uygulama saatinde, ders kapsamında şu ana kadar bahsedilen konulara ilişkin MATLAB fonksiyonları tanıtılacaktır. Polinomial Bir Fonksiyonun Tanıtılması P s s s şeklindeki bir fonksiyona ilişkin nesne,
Bu uygulama saatinde, ders kapsamında şu ana kadar bahsedilen konulara ilişkin MATLAB fonksiyonları tanıtılacaktır. Polinomial Bir Fonksiyonun Tanıtılması P s s s şeklindeki bir fonksiyona ilişkin nesne,
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
Kontrol Sistemleri (EE 326) Ders Detayları
 Ders Detayları") Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Mat-Lab ile Kök Yer Eğrileri
 Mat-Lab ile Kök Yer Eğrileri Prof.Dr. Galip Cansever 1 MatLab ile Kök yer eğrisi çiziminde num = = num 1 + K = 0 den ( s s m + z 1 b s 1 )( s m 1 z m formunu kullanacağız. )...( s +... + b m z m ) den
Mat-Lab ile Kök Yer Eğrileri Prof.Dr. Galip Cansever 1 MatLab ile Kök yer eğrisi çiziminde num = = num 1 + K = 0 den ( s s m + z 1 b s 1 )( s m 1 z m formunu kullanacağız. )...( s +... + b m z m ) den
Çözümlü Limit ve Süreklilik Problemleri
 Bölüm 5 Çözümlü Limit Süreklilik Problemleri. 2 fonksiyonunun tanım bölgesini = noktasındaki itini bulunuz. Paydanın 0 değerini aldığı = noktasında fonksiyon tanımlı değldir. Tanım bölgesini T (f ) ile
Bölüm 5 Çözümlü Limit Süreklilik Problemleri. 2 fonksiyonunun tanım bölgesini = noktasındaki itini bulunuz. Paydanın 0 değerini aldığı = noktasında fonksiyon tanımlı değldir. Tanım bölgesini T (f ) ile
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
Fizik I (Tek ve ki Boyutta Hareket) - Ders sorumlusu: Yrd.Doç.Dr.Hilmi Ku çu
 - Ders sorumlusu: Yrd.Doç.Dr.Hilmi Ku çu") 1 2 3 4 Otomatik Kontrol (Transfer Fonksiyonlar ) - Ders sorumlusu: Yrd.Doç.Dr.Hilmi Ku çu 5 6 Otomatik Kontrol (Transfer Fonksiyonlar ) - Ders sorumlusu: Yrd.Doç.Dr.Hilmi Ku çu 7 Otomatik Kontrol (Transfer
1 2 3 4 Otomatik Kontrol (Transfer Fonksiyonlar ) - Ders sorumlusu: Yrd.Doç.Dr.Hilmi Ku çu 5 6 Otomatik Kontrol (Transfer Fonksiyonlar ) - Ders sorumlusu: Yrd.Doç.Dr.Hilmi Ku çu 7 Otomatik Kontrol (Transfer
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
MATLAB'dan doğrusal sistemlerin matematiksel modellemesi için transfer fonksiyonu, sıfırkutup-kazanç, durum uzayı vs. gösterimler kullanılabilir.
 Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma TEST D 9. E 10. C 11. B 14. D 16. D 12. C 12. A 13. B 14.
 1. Ünite: Polinomlar Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Polinomlarda Bölme, Bölüm ve Kalan Bulma 1 1 1 1 1 1 1 1 1
1. Ünite: Polinomlar Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Polinomlarda Bölme, Bölüm ve Kalan Bulma 1 1 1 1 1 1 1 1 1
MATLAB a GİRİŞ. Doç. Dr. Mehmet İTİK. Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü
 MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI. Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Ders #9. Otomatik Kontrol. Kararlılık (Stability) Prof.Dr.Galip Cansever. 26 February 2007 Otomatik Kontrol. Prof.Dr.
 Prof.Dr.Galip Cansever. 26 February 2007 Otomatik Kontrol. Prof.Dr.") Der #9 Otomatik Kontrol Kararlılık (Stability) 1 Kararlılık, geçici rejim cevabı ve ürekli hal hataı gibi kontrol taarımcıının üç temel unurundan en önemli olanıdır. Lineer zamanla değişmeyen itemlerin
Der #9 Otomatik Kontrol Kararlılık (Stability) 1 Kararlılık, geçici rejim cevabı ve ürekli hal hataı gibi kontrol taarımcıının üç temel unurundan en önemli olanıdır. Lineer zamanla değişmeyen itemlerin
Dersin Yarıyılı. Kredisi. Prof. Dr. İbrahim YÜKSEL/ Öğr. Gör. Dr. Mesut ŞENGİRGİN/ Öğr. Gör. Dr. Gürsel ŞEFKAT/Öğr.Gör.Dr. Zeliha K.
 MAK3002 OTOMATİK KONTROL 2007-2008 YAZ OKULU Adı Otomatik Kontrol Dili Türü Ön Koşulu Koordinatörleri İçeriği Amacı Kodu MAK 3002 Türkçe Zorunlu Yok Yarıyılı 6 Kredisi Laboratuar (Saat/Hafta) Prof. Dr.
MAK3002 OTOMATİK KONTROL 2007-2008 YAZ OKULU Adı Otomatik Kontrol Dili Türü Ön Koşulu Koordinatörleri İçeriği Amacı Kodu MAK 3002 Türkçe Zorunlu Yok Yarıyılı 6 Kredisi Laboratuar (Saat/Hafta) Prof. Dr.
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Elektrik - Elektronik Fakültesi
 . Elektrik - Elektronik Fakültesi KON314 Kontrol Sistem Tasar m Ödev #1 Birol Çapa-4645 Doç. Dr. Mehmet Turan Söylemez 23.3.29 1 1.a.Amaç Transfer fonksiyonu ( n 1 ve n üzerine konulan bir kontrolör ile
. Elektrik - Elektronik Fakültesi KON314 Kontrol Sistem Tasar m Ödev #1 Birol Çapa-4645 Doç. Dr. Mehmet Turan Söylemez 23.3.29 1 1.a.Amaç Transfer fonksiyonu ( n 1 ve n üzerine konulan bir kontrolör ile
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında
![Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında](/thumbs/92/109134106.jpg "Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında") Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
MAK3002 OTOMATİK KONTROL 2008-2009 BAHAR. Ders Kitabı (Ders Notu)
") MAK3002 OTOMATİK KONTROL 2008-2009 BAHAR Dersin Adı Otomatik Kontrol Dersin Dili Dersin Türü Dersin Ön Koşulu Dersin Koordinatörleri Dersin İçeriği Dersin Amacı Dersin Kodu MAK 3002 Türkçe Zorunlu Yok
MAK3002 OTOMATİK KONTROL 2008-2009 BAHAR Dersin Adı Otomatik Kontrol Dersin Dili Dersin Türü Dersin Ön Koşulu Dersin Koordinatörleri Dersin İçeriği Dersin Amacı Dersin Kodu MAK 3002 Türkçe Zorunlu Yok
BM202 SAYISAL ÇÖZÜMLEME
 BM202 SAYISAL ÇÖZÜMLEME DOÇ.DR. CİHAN KARAKUZU DERS-2 1 Ders2-Sayısal Hesaplamalarda Gerek Duyulabilecek Matlab İşlemleri MATLAB, çok paradigmalı (bir şeyin nasıl üretileceği konusunda örnek, model) sayısal
BM202 SAYISAL ÇÖZÜMLEME DOÇ.DR. CİHAN KARAKUZU DERS-2 1 Ders2-Sayısal Hesaplamalarda Gerek Duyulabilecek Matlab İşlemleri MATLAB, çok paradigmalı (bir şeyin nasıl üretileceği konusunda örnek, model) sayısal
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı : Bilgisayar Mühendisliğinde Matematik Uygulamaları
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı : Bilgisayar Mühendisliğinde Matematik Uygulamaları
DENİZ HARP OKULU ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Otomatik Kontrol Sistemleri ELM-322 3 / VI 2+2+0 3 5 Dersin
DENİZ HARP OKULU ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS Otomatik Kontrol Sistemleri ELM-322 3 / VI 2+2+0 3 5 Dersin
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
ELN3052 OTOMATİK KONTROL 2008-2009 BAHAR
 ELN3052 OTOMATİK KONTROL 2008-2009 BAHAR Dersin Adı Dersin Kodu Dersin Yarıyılı Dersin Kredisi Ders Uygulama 3 0 Otomatik Kontrol ELN3052 6 3 Laboratuar (Saat/Hafta) 0 Dersin Dili Türkçe Dersin Türü Seçmeli
ELN3052 OTOMATİK KONTROL 2008-2009 BAHAR Dersin Adı Dersin Kodu Dersin Yarıyılı Dersin Kredisi Ders Uygulama 3 0 Otomatik Kontrol ELN3052 6 3 Laboratuar (Saat/Hafta) 0 Dersin Dili Türkçe Dersin Türü Seçmeli
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
HÜPP PYTHON I.HAFTA ALGORİTMA MANTIĞI, AKIŞ DİYAGRAMLARI VE PYTHON'A GİRİŞ
 HÜPP PYTHON I.HAFTA ALGORİTMA MANTIĞI, AKIŞ DİYAGRAMLARI VE PYTHON'A GİRİŞ PROGRAMLAMAYA GİRİŞ Herhangi bir program yazabilmemiz için öncelikle önümüzde bir problem, soru olması gerekir. Problemi belirledikten
HÜPP PYTHON I.HAFTA ALGORİTMA MANTIĞI, AKIŞ DİYAGRAMLARI VE PYTHON'A GİRİŞ PROGRAMLAMAYA GİRİŞ Herhangi bir program yazabilmemiz için öncelikle önümüzde bir problem, soru olması gerekir. Problemi belirledikten
Sayısal Kontrol - HAVA HARP OKULU
 Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları
 4. Operatörler İfade içerisindeki değişken ve diğer ifadelere uygulandığında yeni değerlerin elde edilmesini sağlayan ve kendilerine özel sembolik gösterimleri olan sözdizimleridir. mikroc derleyicisi
4. Operatörler İfade içerisindeki değişken ve diğer ifadelere uygulandığında yeni değerlerin elde edilmesini sağlayan ve kendilerine özel sembolik gösterimleri olan sözdizimleridir. mikroc derleyicisi
Sinyal Analizi ve Kontrol (AEE303) Ders Detayları
 Ders Detayları") Sinyal Analizi ve Kontrol (AEE303) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Sinyal Analizi ve Kontrol AEE303 Güz 3 2 2 4 7 Ön Koşul Ders(ler)i Dersin
Sinyal Analizi ve Kontrol (AEE303) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Sinyal Analizi ve Kontrol AEE303 Güz 3 2 2 4 7 Ön Koşul Ders(ler)i Dersin
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
BİLGİSAYAR PROGRAMLAMA MATLAB
 BİLGİSAYAR PROGRAMLAMA MATLAB Arş. Gör. Ahmet ARDAHANLI Kafkas Üniversitesi Mühendislik Fakültesi Ders Bilgileri Dersin Hocası: Araş. Gör. Ahmet Ardahanlı E-posta: ahmet.ardahanli@hotmail.com Oda: DZ-33
BİLGİSAYAR PROGRAMLAMA MATLAB Arş. Gör. Ahmet ARDAHANLI Kafkas Üniversitesi Mühendislik Fakültesi Ders Bilgileri Dersin Hocası: Araş. Gör. Ahmet Ardahanlı E-posta: ahmet.ardahanli@hotmail.com Oda: DZ-33
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Dinamik sistemlerin Kontrolü ve Modellemesi MK-413 4/Güz (3+0+0) 3 5
 3 5") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Dinamik sistemlerin Kontrolü ve Modellemesi MK-413 4/Güz (3+0+0) 3 5 Dersin Dili :
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Dinamik sistemlerin Kontrolü ve Modellemesi MK-413 4/Güz (3+0+0) 3 5 Dersin Dili :
Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS. Bilgisayarlı Kontrol Sistemleri BIL
 DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Bilgisayarlı Kontrol Sistemleri BIL311 5 3+0 3 5 Ön Koşul Dersleri Dersin Dili Dersin Seviyesi Dersin Türü Türkçe Lisans Zorunlu / Yüz
DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Bilgisayarlı Kontrol Sistemleri BIL311 5 3+0 3 5 Ön Koşul Dersleri Dersin Dili Dersin Seviyesi Dersin Türü Türkçe Lisans Zorunlu / Yüz

 ş ç ö ç ç ş ş ö ş ş ç ö ö ş ç ç ş ö ö ö ş ş ş ş ş ş ş ö ö ç ç ç ş ş ö ş ö ö ş ö ö ö ş ö ş Ö Ü Ç ö ö Ğ ş ş ö Ö ö ç Ğ ş ş ö Ö ş ş şş ö ş ç ç ö ö ç ş ç ç ç Ö ç ç Ö ç ç ş ş Ö ç ö ş Ö ş ç ç ö ş ö ö ş ö ç ç
ş ç ö ç ç ş ş ö ş ş ç ö ö ş ç ç ş ö ö ö ş ş ş ş ş ş ş ö ö ç ç ç ş ş ö ş ö ö ş ö ö ö ş ö ş Ö Ü Ç ö ö Ğ ş ş ö Ö ö ç Ğ ş ş ö Ö ş ş şş ö ş ç ç ö ö ç ş ç ç ç Ö ç ç Ö ç ç ş ş Ö ç ö ş Ö ş ç ç ö ş ö ö ş ö ç ç
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI
 EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI 23.02.2015 Yrd.Doç.Dr. Dilşad Engin PLC Ders Notları 2 PROGRAMLANABİLİR DENETLEYİCİLER NÜMERİK İŞLEME 23.02.2015 Yrd.Doç.Dr. Dilşad Engin PLC Ders Notları 3
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI 23.02.2015 Yrd.Doç.Dr. Dilşad Engin PLC Ders Notları 2 PROGRAMLANABİLİR DENETLEYİCİLER NÜMERİK İŞLEME 23.02.2015 Yrd.Doç.Dr. Dilşad Engin PLC Ders Notları 3
2. Sonsuz uzunluk kabul edilebilmesi için çubuklar ne kadar uzunlukta olmalıdır? Resim 1
 Örnek 3-9*: 5 mm çapında çok uzun bir çubuğun bir ucu T b =100 C sabit sıcaklıkta tutulmaktadır. Çubuğun yüzeyi T =25 C de ve ısı transfer katsayısı (h) 100 W/m 2 K olan çevresindeki hava (air) ile temastadır.
Örnek 3-9*: 5 mm çapında çok uzun bir çubuğun bir ucu T b =100 C sabit sıcaklıkta tutulmaktadır. Çubuğun yüzeyi T =25 C de ve ısı transfer katsayısı (h) 100 W/m 2 K olan çevresindeki hava (air) ile temastadır.
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Rakam : Sayıları yazmaya yarayan sembollere rakam denir.
 A. SAYILAR Rakam : Sayıları yazmaya yarayan sembollere rakam denir. Sayı : Rakamların çokluk belirten ifadesine sayı denir.abc sayısı a, b, c rakamlarından oluşmuştur.! Her rakam bir sayıdır. Fakat bazı
A. SAYILAR Rakam : Sayıları yazmaya yarayan sembollere rakam denir. Sayı : Rakamların çokluk belirten ifadesine sayı denir.abc sayısı a, b, c rakamlarından oluşmuştur.! Her rakam bir sayıdır. Fakat bazı
Şekil 1. Geri beslemeli yükselteçlerin genel yapısı
 DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
ELN3102 OTOMATİK KONTROL BAHAR
 ELN3102 OTOMATİK KONTROL 2011-2012 BAHAR Prof. Dr. İbrahim YÜKSEL Dr. Ekrem DÜVEN /Dr. Metin HATUN Uludağ Üniversitesi Prof. Dr. İbrahim YÜKSEL Dr. Ekrem DÜVEN Dr. Metin HATUN Dersin Adı Dersin Kodu Dersin
ELN3102 OTOMATİK KONTROL 2011-2012 BAHAR Prof. Dr. İbrahim YÜKSEL Dr. Ekrem DÜVEN /Dr. Metin HATUN Uludağ Üniversitesi Prof. Dr. İbrahim YÜKSEL Dr. Ekrem DÜVEN Dr. Metin HATUN Dersin Adı Dersin Kodu Dersin
T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
 T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ 5 EKSENLİ ROBOT KOLUNUN YÖRÜNGE PLANLAMASI ve DENEYSEL UYGULAMASI Kenan KILIÇASLAN DOKTORA SEMİNERİ MAKİNA MÜHENDİSLİĞİ ANABİLİM DALI YÖNETİCİ Yrd.Doç.Dr.
T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ 5 EKSENLİ ROBOT KOLUNUN YÖRÜNGE PLANLAMASI ve DENEYSEL UYGULAMASI Kenan KILIÇASLAN DOKTORA SEMİNERİ MAKİNA MÜHENDİSLİĞİ ANABİLİM DALI YÖNETİCİ Yrd.Doç.Dr.
Kalkülüs II (MATH 152) Ders Detayları
 Ders Detayları") Kalkülüs II (MATH 152) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kalkülüs II MATH 152 Güz 4 2 0 5 7.5 Ön Koşul Ders(ler)i Math 151 Kalkülüs I Dersin
Kalkülüs II (MATH 152) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kalkülüs II MATH 152 Güz 4 2 0 5 7.5 Ön Koşul Ders(ler)i Math 151 Kalkülüs I Dersin
DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ DEKANLIĞI DERS/MODÜL/BLOK TANITIM FORMU. Dersin Kodu: MAK 3026
 Dersi Veren Birim: Makina Mühendisliği Dersin Adı: KONTROL SİSTEMLERİ Dersin Düzeyi:(Ön lisans, Lisans, Yüksek Lisans, Doktora) Dersin Kodu: MAK 06 Dersin Öğretim Dili: Türkçe Formun Düzenleme / Yenilenme
Dersi Veren Birim: Makina Mühendisliği Dersin Adı: KONTROL SİSTEMLERİ Dersin Düzeyi:(Ön lisans, Lisans, Yüksek Lisans, Doktora) Dersin Kodu: MAK 06 Dersin Öğretim Dili: Türkçe Formun Düzenleme / Yenilenme
13.Konu Reel sayılar
 13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
KYM 202 TERMODİNAMİK
 KYM 0 ERMODİNAMİK AKIŞ PROSESLERİNİN ERMODİNAMİĞİ Kimya, petrol ve ilgili endüstrilerin bir çoğunda akışkan hareketi vardır. ermodinamiğin akış proseslerine uygulanması, kütlenin korunumu ile termodinamiğin
KYM 0 ERMODİNAMİK AKIŞ PROSESLERİNİN ERMODİNAMİĞİ Kimya, petrol ve ilgili endüstrilerin bir çoğunda akışkan hareketi vardır. ermodinamiğin akış proseslerine uygulanması, kütlenin korunumu ile termodinamiğin
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
k ise bir gerçek sayı olsun. Buna göre aşağıdaki işlemler Matlab da yapılabilir.
 MATRİS TRANSPOZU: Bir matrisin satırlarını sütun, sütunlarınıda satır yaparak elde edilen matrise transpoz matris denilir. Diğer bir değişle, eğer A matrisi aşağıdaki gibi tanımlandıysa bu matrisin transpoz
MATRİS TRANSPOZU: Bir matrisin satırlarını sütun, sütunlarınıda satır yaparak elde edilen matrise transpoz matris denilir. Diğer bir değişle, eğer A matrisi aşağıdaki gibi tanımlandıysa bu matrisin transpoz
30. HAZERFAN İHA nın UZUNLAMASINA HAREKET DİNAMİĞİ ve KONTROLÜ. Özet
 3. HAZERAN İHA nın UZUNLAMASINA HAREKET DİNAMİĞİ ve KONTROLÜ Özet Gelişen havacılık teknolojisiyle birlikte gelişimini sürdüren İHAları son zamanlarda üzerinde araştırmalar ve yatırımlar yapılan öncelikli
3. HAZERAN İHA nın UZUNLAMASINA HAREKET DİNAMİĞİ ve KONTROLÜ Özet Gelişen havacılık teknolojisiyle birlikte gelişimini sürdüren İHAları son zamanlarda üzerinde araştırmalar ve yatırımlar yapılan öncelikli
Ders İçerik Bilgisi. Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
Kalkülüs II (MATH 152) Ders Detayları
 Ders Detayları") Kalkülüs II (MATH 152) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kalkülüs II MATH 152 Güz 4 2 0 5 7.5 Ön Koşul Ders(ler)i Math 151 Kalkülüs I Dersin
Kalkülüs II (MATH 152) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kalkülüs II MATH 152 Güz 4 2 0 5 7.5 Ön Koşul Ders(ler)i Math 151 Kalkülüs I Dersin
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU
 METODU") ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
1. Fonksiyonlar Artan, Azalan ve Sabit Fonksiyon Alıştırmalar Çift ve Tek Fonksiyon
 İçindekiler Cebir 1. Fonksiyonlar....... 1.1 Fonksiyonların Tanım, Değer ve Görüntü Kümesi...... 1.1.1 Fonksiyon.. 1.1. Görüntü Kümesi... 1.1.3 Eşit Fonksiyonlar. 1.1.4 Fonksiyonun Gösterimi. 1.1.4.1 Liste
İçindekiler Cebir 1. Fonksiyonlar....... 1.1 Fonksiyonların Tanım, Değer ve Görüntü Kümesi...... 1.1.1 Fonksiyon.. 1.1. Görüntü Kümesi... 1.1.3 Eşit Fonksiyonlar. 1.1.4 Fonksiyonun Gösterimi. 1.1.4.1 Liste
 ş şşş ş ç ş şş ş ş çş Ç Ğ Ü Ü ş ç ç Ü ç ç ç Ü ç Ş Ü ş ç ş Ü Ş Ü ç ç ş Ş ş Ş Ü ş ş ş ş ş ş ş ş ş ç Ç Ş ş Ş ş ş Ü Ş ş ş ş Ü Ü ş ş Ü ş ş Ö ş ç ş ç Ç ç ç ş ş ç Ğ Ğ ş ç ş Ğ ş ş Ş Ğ ş ş ş ş ş ş ş ç Ç ç Ü ş ç
ş şşş ş ç ş şş ş ş çş Ç Ğ Ü Ü ş ç ç Ü ç ç ç Ü ç Ş Ü ş ç ş Ü Ş Ü ç ç ş Ş ş Ş Ü ş ş ş ş ş ş ş ş ş ç Ç Ş ş Ş ş ş Ü Ş ş ş ş Ü Ü ş ş Ü ş ş Ö ş ç ş ç Ç ç ç ş ş ç Ğ Ğ ş ç ş Ğ ş ş Ş Ğ ş ş ş ş ş ş ş ç Ç ç Ü ş ç
KON 314 KONTROL SİSTEM TASARIMI
 KON 34 KONTROL SİSTEM TASARIMI PROJE 2 Öğretim Üyesi: Doç. Dr. Mehmet Turan SÖYLEMEZ HAZIRLAYANLAR TAKIM 6 45437 Burak BEŞER 45442 Elif KÖKSAL 464 Muharrem ULU 4645 Birol ÇAPA Teslim Tarihi: 24.4.29 GİRİŞ
KON 34 KONTROL SİSTEM TASARIMI PROJE 2 Öğretim Üyesi: Doç. Dr. Mehmet Turan SÖYLEMEZ HAZIRLAYANLAR TAKIM 6 45437 Burak BEŞER 45442 Elif KÖKSAL 464 Muharrem ULU 4645 Birol ÇAPA Teslim Tarihi: 24.4.29 GİRİŞ
Altın Oran Arama Metodu(Golden Search)
") Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
BİLGİSAYAR PROGRAMLAMA DERSİ
 BİLGİSAYAR PROGRAMLAMA DERSİ 5. DERS NOTU Konu: Döngü Yapıları Hazırlayan: Yrd. Doç. Dr. Ahmet DUMLU DÖNGÜ YAPILARI Birçok uygulamada bazı işlemlerin tekrar tekrar gerçekleştirilmesi gerekir. Bizlere bu
BİLGİSAYAR PROGRAMLAMA DERSİ 5. DERS NOTU Konu: Döngü Yapıları Hazırlayan: Yrd. Doç. Dr. Ahmet DUMLU DÖNGÜ YAPILARI Birçok uygulamada bazı işlemlerin tekrar tekrar gerçekleştirilmesi gerekir. Bizlere bu
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
bir sonraki deneme değerinin tayin edilmesi için fonksiyonun X e göre türevi kullanılır. Aşağıdaki şekil X e karşı f(x) i göstermektedir.
 i göstermektedir.") 37 Newton-Raphson Yöntemi İle Çözüme Ulaşma Bu yöntem özellikle fonksiyonun türevinin analitik olarak elde edilebildiği durumlarda kullanışlıdır. Fonksiyonel ilişkinin ifade edilmesinde daha uygun bir
37 Newton-Raphson Yöntemi İle Çözüme Ulaşma Bu yöntem özellikle fonksiyonun türevinin analitik olarak elde edilebildiği durumlarda kullanışlıdır. Fonksiyonel ilişkinin ifade edilmesinde daha uygun bir
Kimya Mühendisliğinde Uygulamalı Matematik
 Fen Bilimleri Enstitüsü Kimya Mühendisliği Anabilim Dalı Kimya Mühendisliğinde Uygulamalı Matematik DERS BİLGİ FORMU DERS BİLGİLERİ Dersin Adı Kodu Yarıyıl Kimya Mühendisliğinde Uygulamalı Matematik T
Fen Bilimleri Enstitüsü Kimya Mühendisliği Anabilim Dalı Kimya Mühendisliğinde Uygulamalı Matematik DERS BİLGİ FORMU DERS BİLGİLERİ Dersin Adı Kodu Yarıyıl Kimya Mühendisliğinde Uygulamalı Matematik T
EEM 452 Sayısal Kontrol Sistemleri /
 EEM 452 Sayısal Kontrol Sistemleri / Yrd. Doç. Dr. Rıfat HACIOĞLU Bahar 2016 257 4010-1625, hacirif@beun.edu.tr EEM452 Sayısal Kontrol Sistemleri (3+0+3) Zamanda Ayrık Sistemlerine Giriş. Sinyal değiştirme,
EEM 452 Sayısal Kontrol Sistemleri / Yrd. Doç. Dr. Rıfat HACIOĞLU Bahar 2016 257 4010-1625, hacirif@beun.edu.tr EEM452 Sayısal Kontrol Sistemleri (3+0+3) Zamanda Ayrık Sistemlerine Giriş. Sinyal değiştirme,
Lambda, Map, Filter ve Dizi Tamamlama
 Lambda, Map, Filter ve Dizi Tamamlama Prof.Dr. Bahadır AKTUĞ JFM212 Python ile Mühendislik Uygulamaları *Kaynakça bölümünde verilen kaynaklardan derlenmiştir. Lambda Lambda fonksiyonu veya Lambda operatörü
Lambda, Map, Filter ve Dizi Tamamlama Prof.Dr. Bahadır AKTUĞ JFM212 Python ile Mühendislik Uygulamaları *Kaynakça bölümünde verilen kaynaklardan derlenmiştir. Lambda Lambda fonksiyonu veya Lambda operatörü
Algoritmanın Hazırlanması
 Algoritmanın Hazırlanması Algoritma, herhangi bir sorunun çözümü için izlenecek yol anlamına gelmektedir. Çözüm için yapılması gereken işlemler hiçbir alternatif yoruma izin vermeksizin sözel olarak ifade
Algoritmanın Hazırlanması Algoritma, herhangi bir sorunun çözümü için izlenecek yol anlamına gelmektedir. Çözüm için yapılması gereken işlemler hiçbir alternatif yoruma izin vermeksizin sözel olarak ifade
Kontrol Sistemlerinin Tasarımı
 Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım II PD Denetleyici ve Faz İlerletici Dengeleyici 1 Ardarda (Kaskat) bağlantı kullanılarak geri beslemeli sistemin geçici rejim cevabının iyileştirilmesi
Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım II PD Denetleyici ve Faz İlerletici Dengeleyici 1 Ardarda (Kaskat) bağlantı kullanılarak geri beslemeli sistemin geçici rejim cevabının iyileştirilmesi
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
Yaz Stajı II (IE 499) Ders Detayları
 Ders Detayları") Yaz Stajı II (IE 499) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Yaz Stajı II IE 499 Güz 0 0 0 0 6 Ön Koşul Ders(ler)i IE 399 Dersin Dili Dersin Türü
Yaz Stajı II (IE 499) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Yaz Stajı II IE 499 Güz 0 0 0 0 6 Ön Koşul Ders(ler)i IE 399 Dersin Dili Dersin Türü
MAK1010 MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI
 .. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
.. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
BMT 101 Algoritma ve Programlama I 7. Hafta. Yük. Müh. Köksal Gündoğdu 1
 BMT 101 Algoritma ve Programlama I 7. Hafta Yük. Müh. Köksal Gündoğdu 1 C++ Program Denetimi Yük. Müh. Köksal Gündoğdu 2 Program Denetimi Bir program, belirli deyim satırlarından oluşur ve genellikle bu
BMT 101 Algoritma ve Programlama I 7. Hafta Yük. Müh. Köksal Gündoğdu 1 C++ Program Denetimi Yük. Müh. Köksal Gündoğdu 2 Program Denetimi Bir program, belirli deyim satırlarından oluşur ve genellikle bu
GÖRSEL PROGRALAMA HAFTA 3 ALGORİTMA VE AKIŞ DİYAGRAMLARI
 GÖRSEL PROGRALAMA HAFTA 3 ALGORİTMA VE AKIŞ DİYAGRAMLARI DERS İÇERİĞİ Algoritma nedir? Akış Diyagramı nedir? Örnek Uygulama ALGORİTMA Algoritma sözcüğü Ebu Abdullah Muhammed İbn Musa el Harezmi adındaki
GÖRSEL PROGRALAMA HAFTA 3 ALGORİTMA VE AKIŞ DİYAGRAMLARI DERS İÇERİĞİ Algoritma nedir? Akış Diyagramı nedir? Örnek Uygulama ALGORİTMA Algoritma sözcüğü Ebu Abdullah Muhammed İbn Musa el Harezmi adındaki
biçimindeki ifadelere iki değişkenli polinomlar denir. Bu polinomda aynı terimdeki değişkenlerin üsleri toplamından en büyük olanına polinomun dereces
 TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ DEKANLIĞI DERS/MODÜL/BLOK TANITIM FORMU. Dersin Kodu: MME 1001
 Dersi Veren Birim: Metalurji ve Malzeme Mühendisliği Dersin Adı: INTRODUCTION TO MATERIALS ENGINEERING Dersin Düzeyi:(Ön lisans, Lisans, Yüksek Lisans, Doktora) Lisans Dersin Kodu: MME 00 Dersin Öğretim
Dersi Veren Birim: Metalurji ve Malzeme Mühendisliği Dersin Adı: INTRODUCTION TO MATERIALS ENGINEERING Dersin Düzeyi:(Ön lisans, Lisans, Yüksek Lisans, Doktora) Lisans Dersin Kodu: MME 00 Dersin Öğretim
T.C. Ölçme, Seçme ve Yerleştirme Merkezi
 T.C. Ölçme, Seçme ve Yerleştirme Merkezi LİSANS YERLEŞTİRME SINAVI-1 MATEMATİK TESTİ 11 HAZİRAN 2017 PAZAR Bu testlerin her hakkı saklıdır. Hangi amaçla olursa olsun, testlerin tamamının veya bir kısmının
T.C. Ölçme, Seçme ve Yerleştirme Merkezi LİSANS YERLEŞTİRME SINAVI-1 MATEMATİK TESTİ 11 HAZİRAN 2017 PAZAR Bu testlerin her hakkı saklıdır. Hangi amaçla olursa olsun, testlerin tamamının veya bir kısmının