«VftEK «EKAHlZrT/i.ıRINIH HAREKET KANUNLARI ÜZERİNE
|
|
|
- Sanaz Açık
- 6 yıl önce
- İzleme sayısı:
Transkript
1 «VftEK «EKAHlZrT/i.ıRINIH HAREKET KANUNLARI ÜZERİNE Profesör Doktor Mustafa KöSIOİLlf Yardımcı Doçent Doktor Yûksti YILMAZ 1, 6İRÎŞ Özellikle tekstil makinalarında hareket dönüştürücü mekanizmalar olarak yürek mekanizmaları oldukça çok kullanılmaktadır. Bu tür mekanizmaların her türlü hareketi gerçekleşebilire özellikleri vardır. Hareket kanunları önceden seçilirden, sistemde darbe ve silkintinin olmamasına özen gösterilmesi gerekir. Bunun için de Yürek mekanizmalarının hareket kanunlarının özelliklerinin bilinmesi gerekir. Bu çalışmada normlaştırılmış hareket kanunları ele alınmış ve özellikleri verilmiştir. 2. ESASLAR Yürek mekanizmalarında hareket kanunları tahrik uzvu (yürek) ile tahrik edilen uzuv (tij) arasındaki izafi hareketi belirleyen analitik fonksiyonlardır. Alışılmış hallerde yürek mekanizmaları tarafından gerçekleştifilecek olan bu hareket doğrusal yönlü yürek mekanizmalarında t zamanı göstermek üzere s(tj ve sarkaç kollu yürek mekanizmalarında ise >(tj ile gösterilip, her ikisi de ^( t ) tahrik hareketinin bağımlıdır, S ( t )» s [#(t)] ve *(t)«imvt>(t)] Şekil 1. Şekil 1, a) Doğrusal Yönlü Yürek Mekanizması b) Sarkaçkollu Yürek Mekanizması * ye göre türev (') ile ve zamana göre türev ( ) ile ifade edilirce harrt»* eîde n edîhr ana ^ türevieri alınarak tahrik edilen uzvun hız ve ivme bagınîüari 5Eğer Yürek düzgün dönüyorsa, bu özel hal için hız ve ivmeler*»" = «B ^**-a B = 0 olacağından - sabit ve
2 s"=s»<4 *- it-vw*» (2) olur, Aynı hareket kanunlarının sarkaç kollu yürek mekanizmaları için de geçerli olması nedeniyle aşağıda yalnızca doğrusal yönlü yürek mekanizmalarında hareket kanunları incelenecektir, Hareket kanunlarını ele almadan önce hareket planı ve hareket diyagramından söz etmek gerekir. Yürek mekanizmasında» tahrik edilen uzvun hareketi için ön şartlar, örneğin dönme açıları ve bu açılarla eşlenen, yükselmeler bir hareket planında tesbit edilir. Şekil 2'de böyle bir plan gösterilmiştir. Sakil 2, Hareketin planı Hesapları belirli bir düzen dahilinde yapabilmek amacıyla da bu plan istenen tmreketlerin sağlandığı kısımlara ayrılır, örneğin çıkış, Bekleme ve İniş gibi. Her hareket bölümü için sınır noktalar 0, 1, 2,.., gibi rakamlarla ve her hareket bölümünde, yüreğin o kısımla eşlenen dönme açısı <% ; t "0,1,2,,.,, 7.» 1,2,3,.- ile gösteri 1 irst % = fy - ^ ve tijin yükselmesi,-*$. olarak hesaplanacaktır, Ayrıca^ m ^y + ^ ve. f s- s^ + s f s bağıntıları Vardır, Hareket planında, herbir hareket göre tesbit edilmiş hareket kanunları yerieştirmek suretiyle, hareke planı hareket diyagramına dönüştürülmüş olur (Şekil 3), Şekil 3. Hareket Diyagramı
3 Hareket planında, hareketin herbir bölümüne ait sınır noktaları yüreğin dönme açısı ve tijin S stroku ile belirlendikten başka, bu noktalara ait hız ve ivmelerin tesbiti de gerekmektedir. Dört halle karşılaşılır; v=0, a-0 Bekleme(Bk vdq a=0 sabit hız (SH); v=0 s a^o, geri dönüş (SO), ve v/0, atû ivmeli hareket fîh), Herhangi iki sınır noktasında 16 değişik hareket problemiyle karşılaşılmaktadır. Bunlar Çizelge 1'de verilmiştir. Çizelge 1
4 z.. ^ JUL- (5) Aynı düşünce tij in S yolu için yapılırsa '*-4f- (e) Buradan normlaştırılmış hareket kanunu u =f ü <v - (7), -, olarak tanımlanmaktadır, bununda % 'ye göre 1., 2* ve 3. türevleri alınarak _U f 2. ve 3. mertebeden hareket kanunları elde edilir. Bu normlaştırılmış hareket kanundan da gerçek hareket kanunu, hız ve ivme doğrusal yönlü yürek mekanizmalarında bağıntılarından ve sarkaç kollu yürek mekanizmalarında ise bağıntılarından bulunur. S 1, S 1 \ ve S" ' 1., 2, ve 3. mertebeden hareket kanunları f, f M ve f M I ist 1,, -2. ve 3. mertebeden hareket fonksiyonları olarak isimlendirilmektedir, f f U),r f U)ve T"{2) normlaştırılmış hareket kanunları ili r(z).r{z) çarpımının maksimum değerleri, hareket kanunlarının kıyaslanması için bir kriter olmaktadır. W*>=!<v. *" (*)- K a, r,uu)- K d. f'izi-f'^u^ di) ile gösterilsin, Bu değerlerin herhangi bir hareket kanunu için en küçük olması gerekmektedir. 4, KLASİK NORMLAŞTIRILMIŞ HAREKET KANUNLARI Burada, Çizelge 1'de verilan olasılıklardan yalnızca B-B için normlaştırılmış hareket kanunları ele alınacaktır, Hareket kanunları simetrik veya simetrik olmayan türden olabilir* 4*1, B-B için Simetrik ve Ntormlaştırılmış Hareket Kanunları B-B de genelde silkinti ve darbenin olmaması istenir, Silkinti ivmenin birden* bire sonlu değerde, darbe ise sonsuz değerde sıçrama göstermesiyle ortaya çıkar, Doğru : O< '< 1.. f f a l f f =O (12) Yürek mekanizmaları için silkinti ve darbe özelliği nedeniyle tavsiye edilmemektedir.
5 Kuadratik Paraboİ^ 0 < Z < 0,5 fi = fj «4z 2 fj «= 4Z O,5.<Z<1 f as=1 _2(Z-i) f^-^z«!) f'=-4 Kuadradik parabolde K. pek büyük değil. Bu hareket kanunu üç silkintî1 idir* İvmedeki sıçrama, titreşiri?, gürültü, ve aşınma sebebiyle pek elverişli bir hareket kanunu değildir, kuvvet kapalı yürek mekanizmalarında daha kuvvetli yaylara ihtiyaç göstermektedir. Adi Sinoid: o<z<i -f =-1- [i-co$(?r2) ] f s*jl Sm{ïï Z) (13) f» = _ïï?_cos( ir Ä) 2 f " İ- Sin (?r ) 2 f,f ^JjÇ SIn(2tZ) (14) K yî K a ve K^ değerleri nisbeten küçük iki silkintin titreşim, gürültü ve a- pnmalıdır,b-b için uygun bir hareket kanunudur, Ş i 1 k i nt i s i z 5. Derece Po 1 i nornu ; 0 <Z < 1 f = 10z 3-15Z Z 5 f = 30Z 2-60Z 3 +, 30 Z 4 f'= 60Z -180Z 2 +12CB 3 f" = ^ ^2 (15) K y» K a? M m pek büyük değerlerde değil K d ise Âdi sinoide göre daha büyük Yüksek Sinoid: 0 <z < 1 f = z--l-s\n{2 v z) f 3 * 1-Cos(2ffZ) '., f f = 27rSin.(2-ir2) (16) f,f as Özellikle K^'nin küçük titreşim oldukça zayıf, yüksek devir sayılı yürek mekanizmaları için en uygun hareket kanunudur, TadilEdilmiş Tropez ivmeli Hareket Kanunu O ««L ±. È f Z fl = _ _ f [Z l_ Sm4itz] r l " 1^ T [ 1-C«4TTZ] ' f. = - 8. ^j^.sin^) j (4, ) S n rz (17) f " = -Ä! T- Coi4irZ f fi = ( îi-r> * t Sin 47T Z - J- Sin (Swz ) ]
6
7 4,2. B-B için Simetrik Olmayan ve Normlaştırılmış Hareket Kanunları Simetrik olmayan hareket kanunu bilinen simetrik hareket kanunu dönüm noktasının f(z)=z doğrusu üzerinde kaydırılmalıyla elde edilmektedir (Şekil 5), Böyle bir simetrik olmayan hareket kanunda pozitif ve negatif ivmelerin faz dağılımları farklılık gösterdiği göbi K,'da K ve K* olmak üzere iki değerlidir. Şekil 5, Normlaştırılmış ve simetrik hareket kanundan normlaştırılmış ve simetrik olmayan hareket kanunun elde edilmesi. Ö<Z<x vex<z<1 aralıklarına duruma göre küçültülmüş veya büyütülmüş simetrik ve normlaştırılmış hareket kanunu yerleştirilir. Eğer f(t) normlaştırılmış ve simetrik hareket kanunu olarak gösterilirse, normlaştırılmış ve simetrik olmayan hareket kanunu ve bunun türevleri aşağıdaki tarzda elde edilmektedir. O < Z < X aralığında f(z) = Z\ f( W) f ( Z ) = f ( W ) X < Z < 1 aralığında (22) f#( Z )m İr r ( r ] f(^) - X + 2(1-X)[f{r)-.0 i 5] r(sï -«rhr r(rï f " U ) S^2X4^ f" U ) (23) f(z ).r(z )-._J_-.;r(jT)-f ; (r ) Dönüm noktasının kaydırılması sebebiyle normlaştırılmış ve simetrik harektt kanununa ait K-, K-, K a, ve K^j değerleri ile normlaştırılmış ve simetrik olmayan hareket kanununa ait deflerler arasında \ = K- (değişmemektedir) O < Z < X aralımda, lc a-^- <K ı ; K d-^- K d % s -İ-% (241 X < Z < 1»iı ında» bağıntıları vardır.
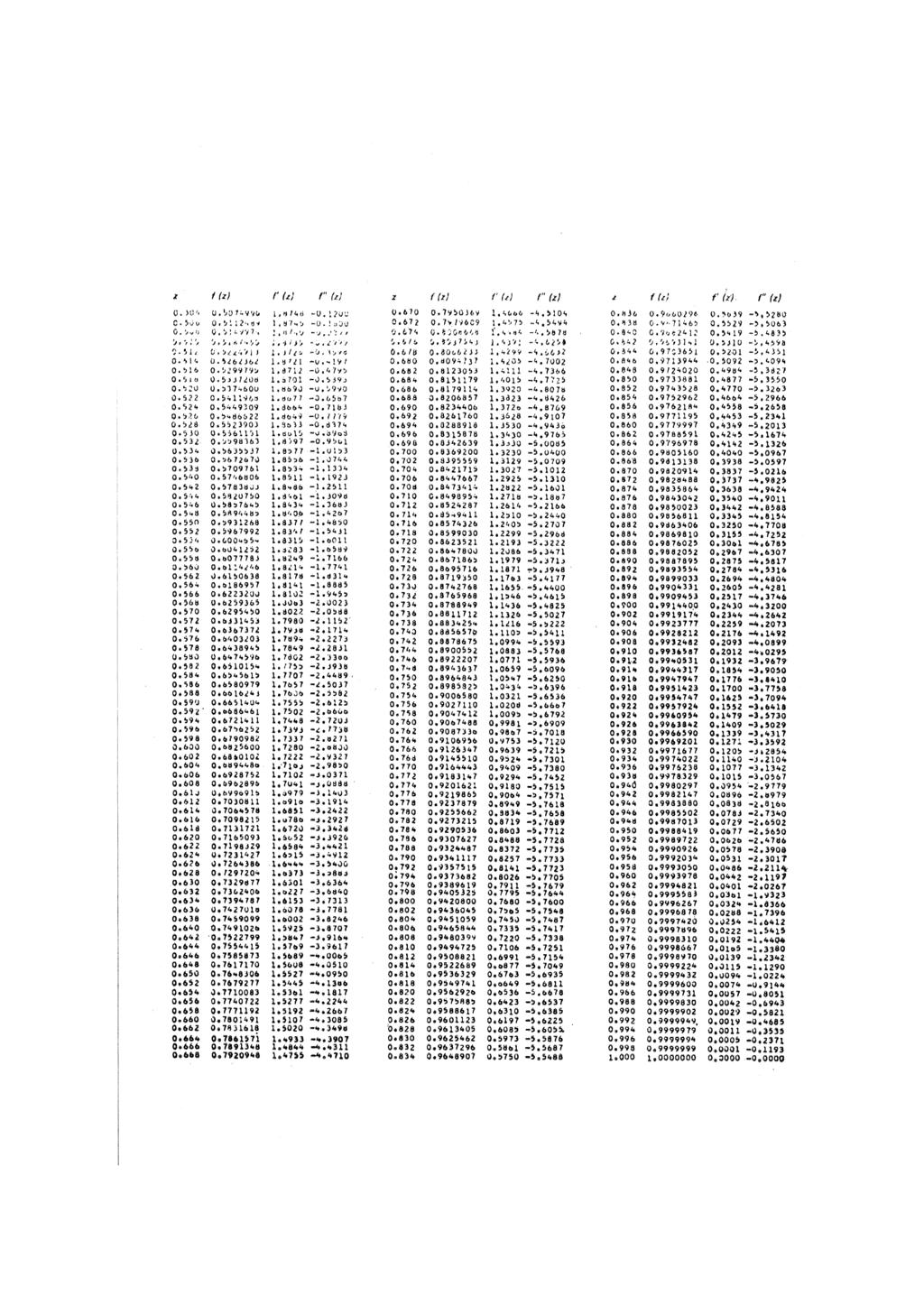
8 B-B için en çok kullanılan 5. derece polinomuna ve yüksek sînoide ait normlaştırılmış hareket kanunu ait değerler çizelgesi çalışmanın sonuna ilave edilmiştir, KAYNAKLAR 1- Dizioğlu. B, Getriebelehre, Band 2'Vieweg und John Braunschweig Köseoğlu M», Mekanizma Tekniği Ders notları, İTÜ. Makina Fakültesi, , Volmer, J., Getriebetechnik Veb. Verlag Technik, Volmer, J., Kurvengetriebe, Veb. Verlag Technik Berlin, Yılmaz, Y. t Yürek Mekanizmalarının imalat hatalarıyla birlikte Dinamik Anoliji İTÜ, Makina Fakültesi Ofset Atölyesi, 1979 İstanbul (Doktora Tezi)
9
10
11
12
13
DÜZLEM YÜREK MEKANİZMALARI
 DÜZLEM YÜREK MEKANİZMALARI Yüksek eleman çifti içeren mekanizmalardır. Hareket esnasında yürek ile tahrik edilen uzuv, doğrudan doğruya temasta olabilirler. Genellikle yürek ile tahrik edilen uzuv arasına
DÜZLEM YÜREK MEKANİZMALARI Yüksek eleman çifti içeren mekanizmalardır. Hareket esnasında yürek ile tahrik edilen uzuv, doğrudan doğruya temasta olabilirler. Genellikle yürek ile tahrik edilen uzuv arasına
ÜÇ ÇUBUK MEKANİZMASI
 ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
İşaret ve Sistemler. Ders 3: Periyodik İşaretlerin Frekans Spektrumu
 İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ
 İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ 1.1. FİZİKTE ÖLÇME VE BİRİMLERİN ÖNEMİ... 2 1.2. BİRİMLER VE BİRİM SİSTEMLERİ... 2 1.3. TEMEL BİRİMLERİN TANIMLARI... 3 1.3.1. Uzunluğun
İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ 1.1. FİZİKTE ÖLÇME VE BİRİMLERİN ÖNEMİ... 2 1.2. BİRİMLER VE BİRİM SİSTEMLERİ... 2 1.3. TEMEL BİRİMLERİN TANIMLARI... 3 1.3.1. Uzunluğun
RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK
 Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
2012 LYS MATEMATİK SORU VE ÇÖZÜMLERİ Niyazi Kurtoğlu
 .SORU 8 sayı tabanında verilen (5) 8 sayısının sayı tabanında yazılışı nedir?.soru 6 3 3 3 3 4 6 8? 3.SORU 3 ise 5? 5 4.SORU 4 5 olduğuna göre, ( )? 5.SORU (y z) z(y ) y z yz bulunuz. ifadesinin en sade
.SORU 8 sayı tabanında verilen (5) 8 sayısının sayı tabanında yazılışı nedir?.soru 6 3 3 3 3 4 6 8? 3.SORU 3 ise 5? 5 4.SORU 4 5 olduğuna göre, ( )? 5.SORU (y z) z(y ) y z yz bulunuz. ifadesinin en sade
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
MAK 308 MAKİNA DİNAMİĞİ
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Bu sunum, ders kitabına ek olarak Sayın Prof. Dr. Turgut Tümer in Temel Makina Dinamiği Eğitimi Çalıştayında yaptığı sunumdan yararlanılarak hazırlanmıştır.
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Bu sunum, ders kitabına ek olarak Sayın Prof. Dr. Turgut Tümer in Temel Makina Dinamiği Eğitimi Çalıştayında yaptığı sunumdan yararlanılarak hazırlanmıştır.
MALTA HAÇI MEKANİZMASININ KİNEMATİĞİ ÜZERİNE
 MALTA HAÇI MEKANİZMASININ KİNEMATİĞİ ÜZERİNE Yrdımcı Doçent Doktor Yılmz YÜKSEL 1. GİRİŞ Tekstil Mklnlrmd hmmddeyi mmul mdde hline getirirken çoğu kere bir çok teknik iş belirli bir sıry göre rdrd ypılmktdır.
MALTA HAÇI MEKANİZMASININ KİNEMATİĞİ ÜZERİNE Yrdımcı Doçent Doktor Yılmz YÜKSEL 1. GİRİŞ Tekstil Mklnlrmd hmmddeyi mmul mdde hline getirirken çoğu kere bir çok teknik iş belirli bir sıry göre rdrd ypılmktdır.
Makina Dinamiği. Yrd. Doç. Dr. Semih Sezer.
 Yrd. Doç. Dr. Semih Sezer Makina Dinamiği sezer@yildiz.edu.tr Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Yrd. Doç. Dr. Semih Sezer Makina Dinamiği sezer@yildiz.edu.tr Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Temel Kavramlar. (r) Sıfırdan farklı kompleks sayılar kümesi: C. (i) Rasyonel sayılar kümesi: Q = { a b
 Sıfırdan farklı kompleks sayılar kümesi: C. (i) Rasyonel sayılar kümesi: Q = { a b") Bölüm 1 Temel Kavramlar Bu bölümde bağıntı ve fonksiyon gibi bazı temel kavramlar üzerinde durulacak, tamsayıların bazı özellikleri ele alınacaktır. Bu çalışma boyunca kullanılacak bazı kümelerin gösterimleri
Bölüm 1 Temel Kavramlar Bu bölümde bağıntı ve fonksiyon gibi bazı temel kavramlar üzerinde durulacak, tamsayıların bazı özellikleri ele alınacaktır. Bu çalışma boyunca kullanılacak bazı kümelerin gösterimleri
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Zorlamalı Titreşim ş Testleri
 Zorlamalı Titreşim ş Testleri Prof. Dr. Uğurhan Akyüz SERAMAR Çalıştayı 01 Ekim 2010 Hatay, Türkiye Amaç 2 Yapı sistemlerinin deprem, rüzgar, vb. dinamik yüklere maruz kaldığında gösterdiği davranışı belirleyen
Zorlamalı Titreşim ş Testleri Prof. Dr. Uğurhan Akyüz SERAMAR Çalıştayı 01 Ekim 2010 Hatay, Türkiye Amaç 2 Yapı sistemlerinin deprem, rüzgar, vb. dinamik yüklere maruz kaldığında gösterdiği davranışı belirleyen
GÜÇ VE HAREKET ĠLETĠM ELEMANLARI
 GÜÇ VE HAREKET ĠLETĠM ELEMANLARI P=sbt n m? n iģmak Ġġ MAKĠNASI Yapı olarak motor, güc ve hareket iletim elemanları ve iģ makinası kısmından oluģan bir makinanın esas amacı baģka bir enerjiyi mekanik enerjiye
GÜÇ VE HAREKET ĠLETĠM ELEMANLARI P=sbt n m? n iģmak Ġġ MAKĠNASI Yapı olarak motor, güc ve hareket iletim elemanları ve iģ makinası kısmından oluģan bir makinanın esas amacı baģka bir enerjiyi mekanik enerjiye
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
HAREKET HAREKET KUVVET İLİŞKİSİ
 HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
BMT 206 Ayrık Matematik. Yük. Müh. Köksal GÜNDOĞDU 1
 BMT 206 Ayrık Matematik Yük. Müh. Köksal GÜNDOĞDU 1 Kümeler Yük. Müh. Köksal GÜNDOĞDU 2 Kümeler Kümeler Ayrık Matematiğin en temel konularından biridir Sayma problemleri için önemli Programlama dillerinin
BMT 206 Ayrık Matematik Yük. Müh. Köksal GÜNDOĞDU 1 Kümeler Yük. Müh. Köksal GÜNDOĞDU 2 Kümeler Kümeler Ayrık Matematiğin en temel konularından biridir Sayma problemleri için önemli Programlama dillerinin
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU -1-
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
Dairesel Temellerde Taban Gerilmelerinin ve Kesit Zorlarının Hesabı
 Prof. Dr. Günay Özmen İTÜ İnşaat Fakültesi (Emekli), İstanbul gunozmen@yahoo.com Dairesel Temellerde Taban Gerilmelerinin ve Kesit Zorlarının Hesabı 1. Giriş Zemin taşıma gücü yeter derecede yüksek ya
Prof. Dr. Günay Özmen İTÜ İnşaat Fakültesi (Emekli), İstanbul gunozmen@yahoo.com Dairesel Temellerde Taban Gerilmelerinin ve Kesit Zorlarının Hesabı 1. Giriş Zemin taşıma gücü yeter derecede yüksek ya
Diferensiyel denklemler sürekli sistemlerin hareketlerinin ifade edilmesinde kullanılan denklemlerdir.
 .. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
.. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
MAKİNE ELEMANLARI DERS SLAYTLARI
 MAKİNE ELEMANLARI DERS SLAYTLARI AKSLAR VE MİLLER P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L İ HOĞ LU Dönen parça veya elemanlar taşıyan
MAKİNE ELEMANLARI DERS SLAYTLARI AKSLAR VE MİLLER P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L İ HOĞ LU Dönen parça veya elemanlar taşıyan
VECTOR MECHANICS FOR ENGINEERS: STATICS
 Seventh Edition VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Ders Notu: Hayri ACAR İstanbul Teknik Üniveristesi Tel: 85 31 46 / 116 E-mail: acarh@itu.edu.tr Web: http://atlas.cc.itu.edu.tr/~acarh
Seventh Edition VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Ders Notu: Hayri ACAR İstanbul Teknik Üniveristesi Tel: 85 31 46 / 116 E-mail: acarh@itu.edu.tr Web: http://atlas.cc.itu.edu.tr/~acarh
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
PROJE ADI: Bir Koniğin Üzerindeki Veya Dışındaki Bir Noktadan Çizilen Teğetlerin Denklemlerini Matrisler Yardımıyla Bulma
 PROJE ADI: Bir Koniğin Üzerindeki Veya Dışındaki Bir oktadan Çizilen Teğetlerin Denklemlerini Matrisler Yardımıyla Bulma PROJEİ AMACI: Bu projede herhangi bir koniğin üzerindeki veya dışındaki bir noktadan
PROJE ADI: Bir Koniğin Üzerindeki Veya Dışındaki Bir oktadan Çizilen Teğetlerin Denklemlerini Matrisler Yardımıyla Bulma PROJEİ AMACI: Bu projede herhangi bir koniğin üzerindeki veya dışındaki bir noktadan
Temel bilgiler-flipped Classroom Akslar ve Miller
 Makine Elemanları I Prof. Dr. İrfan KAYMAZ Temel bilgiler-flipped Classroom Akslar ve Miller İçerik Aks ve milin tanımı Akslar ve millerin mukavemet hesabı Millerde titreşim hesabı Mil tasarımı için tavsiyeler
Makine Elemanları I Prof. Dr. İrfan KAYMAZ Temel bilgiler-flipped Classroom Akslar ve Miller İçerik Aks ve milin tanımı Akslar ve millerin mukavemet hesabı Millerde titreşim hesabı Mil tasarımı için tavsiyeler
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
HİTİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE MÜHENDİSLİĞİ LABORATUVARI I DERSİ STATİK DENGELEME DENEYİ FÖYÜ
 HİTİT ÜNİVESİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE MÜHENDİSLİĞİ LABOATUVAI I DESİ STATİK DENGELEME DENEYİ FÖYÜ 1. GİİŞ Dengeleme: İstenmeyen eylemsizlik kuvvetlerinin yok edilmesi
HİTİT ÜNİVESİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE MÜHENDİSLİĞİ LABOATUVAI I DESİ STATİK DENGELEME DENEYİ FÖYÜ 1. GİİŞ Dengeleme: İstenmeyen eylemsizlik kuvvetlerinin yok edilmesi
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
Saf Eğilme(Pure Bending)
") Saf Eğilme(Pure Bending) Saf Eğilme (Pure Bending) Bu bölümde doğrusal, prizmatik, homojen bir elemanın eğilme etkisi altındaki şekil değiştirmesini/ deformasyonları incelenecek. Burada çıkarılacak formüller
Saf Eğilme(Pure Bending) Saf Eğilme (Pure Bending) Bu bölümde doğrusal, prizmatik, homojen bir elemanın eğilme etkisi altındaki şekil değiştirmesini/ deformasyonları incelenecek. Burada çıkarılacak formüller
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
2 1 fonksiyonu veriliyor. olacak şekilde ortalama değer teoremini sağlayacak bir c sayısının var olup olmadığını araştırınız. Eğer var ise bulunuz.
 ANALİZ 1.) a) sgn. sgn( 1) = 1 denkleminin çözüm kümesini b) f ( ) 3 1 fonksiyonu veriliyor. olacak şekilde ortalama değer teoremini sağlayacak bir c sayısının var olup olmadığını araştırınız. Eğer var
ANALİZ 1.) a) sgn. sgn( 1) = 1 denkleminin çözüm kümesini b) f ( ) 3 1 fonksiyonu veriliyor. olacak şekilde ortalama değer teoremini sağlayacak bir c sayısının var olup olmadığını araştırınız. Eğer var
Örnek. Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız.
 Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
1203608-SIMÜLASYON DERS SORUMLUSU: DOÇ.DR. SAADETTIN ERHAN KESEN. Ders No:2 Simülasyon Örnekleri
 1203608-SIMÜLASYON DERS SORUMLUSU: DOÇ.DR. SAADETTIN ERHAN KESEN Ders No:2 GIRIŞ Bu derste elle ya da bir çalışma sayfası yardımıyla oluşturulacak bir simülasyon tablosunun kullanımıyla yapılabilecek simülasyon
1203608-SIMÜLASYON DERS SORUMLUSU: DOÇ.DR. SAADETTIN ERHAN KESEN Ders No:2 GIRIŞ Bu derste elle ya da bir çalışma sayfası yardımıyla oluşturulacak bir simülasyon tablosunun kullanımıyla yapılabilecek simülasyon
 LYS Y OĞRU MTMTİK TSTİ LYS-. u testte Matematik ile ilgili soru vardır.. evaplarınızı, cevap kâğıdının Matematik Testi için ayrılan kısmına işaretleyiniz.. u testteki süreniz 7 dakikadır.. a ve b asal
LYS Y OĞRU MTMTİK TSTİ LYS-. u testte Matematik ile ilgili soru vardır.. evaplarınızı, cevap kâğıdının Matematik Testi için ayrılan kısmına işaretleyiniz.. u testteki süreniz 7 dakikadır.. a ve b asal
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (3. Hafta)
") TAŞIYICI SİSTEMLER VE MESNET TEPKİLERİ STATİK (3. Hafta) Taşıyıcı Sistemler Bir yapıya etki eden çeşitli kuvvetleri güvenlik sınırları içinde taşıyan ve bu kuvvetleri zemine aktaran sistemlere taşıyıcı
TAŞIYICI SİSTEMLER VE MESNET TEPKİLERİ STATİK (3. Hafta) Taşıyıcı Sistemler Bir yapıya etki eden çeşitli kuvvetleri güvenlik sınırları içinde taşıyan ve bu kuvvetleri zemine aktaran sistemlere taşıyıcı
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Temel Kavramlar 1 Doğal sayılar: N = {0, 1, 2, 3,.,n, n+1,..} kümesinin her bir elamanına doğal sayı denir ve N ile gösterilir.
 Temel Kavramlar 1 Doğal sayılar: N = {0, 1, 2, 3,.,n, n+1,..} kümesinin her bir elamanına doğal sayı denir ve N ile gösterilir. a) Pozitif doğal sayılar: Sıfır olmayan doğal sayılar kümesine Pozitif Doğal
Temel Kavramlar 1 Doğal sayılar: N = {0, 1, 2, 3,.,n, n+1,..} kümesinin her bir elamanına doğal sayı denir ve N ile gösterilir. a) Pozitif doğal sayılar: Sıfır olmayan doğal sayılar kümesine Pozitif Doğal
KAM MEKANİZMASI İÇEREN KANCA TAHRİK MEKANİZMALARININ KİNEMATİK TASARIMI VE KANCA HAREKET EĞRİSİNİN ANALİZİ
 PAMUKKALE ÜNİ VERSİ TESİ MÜHENDİ SLİ K FAKÜLTESİ PAMUKKALE UNIVERSITY ENGINEERING COLLEGE MÜHENDİ SLİ K BİLİMLERİ DERGİ S İ JOURNAL OF ENGINEERING SCIENCES YIL CİLT SAYI SAYFA : 003 : 9 : : 53-6 KAM MEKANİZMASI
PAMUKKALE ÜNİ VERSİ TESİ MÜHENDİ SLİ K FAKÜLTESİ PAMUKKALE UNIVERSITY ENGINEERING COLLEGE MÜHENDİ SLİ K BİLİMLERİ DERGİ S İ JOURNAL OF ENGINEERING SCIENCES YIL CİLT SAYI SAYFA : 003 : 9 : : 53-6 KAM MEKANİZMASI
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Newton Kanunlarının Uygulaması
 BÖLÜM 5 Newton Kanunlarının Uygulaması Hedef Öğretiler Newton Birinci Kanunu uygulaması Newtonİkinci Kanunu uygulaması Sürtünme ve akışkan direnci Dairesel harekette kuvvetler Giriş Newton Kanunlarını
BÖLÜM 5 Newton Kanunlarının Uygulaması Hedef Öğretiler Newton Birinci Kanunu uygulaması Newtonİkinci Kanunu uygulaması Sürtünme ve akışkan direnci Dairesel harekette kuvvetler Giriş Newton Kanunlarını
Kısıtsız Optimizasyon OPTİMİZASYON Kısıtsız Optimizasyon
 OPTİMİZASYON Bu bölümde çok değişkenli kısıtsız optimizasyon problemlerinin çözüm yöntemleri incelenecektir. Bu bölümde anlatılacak yöntemler, kısıtlı optimizasyon problemlerini de çözebilmektedir. Bunun
OPTİMİZASYON Bu bölümde çok değişkenli kısıtsız optimizasyon problemlerinin çözüm yöntemleri incelenecektir. Bu bölümde anlatılacak yöntemler, kısıtlı optimizasyon problemlerini de çözebilmektedir. Bunun
YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50
 YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50 Toplam 100 1 Mukavemet ve Statiğin Önemi 2 Statiğin
YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50 Toplam 100 1 Mukavemet ve Statiğin Önemi 2 Statiğin
Makina Dinamiği MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ
 MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
TOU-S02 Akıllı Pompa Kontrol Ünitesi
 TOU-S02 Akıllı Pompa Kontrol Ünitesi TOU-S02 Akıllı kontrol ünitesi, 0.75-7.5KW (1-10 HP) güç aralığındaki direk kalkışlı üç fazlı ikili derin kuyu pompalarının, hidrofor pompalarının ve drenaj pompalarının
TOU-S02 Akıllı Pompa Kontrol Ünitesi TOU-S02 Akıllı kontrol ünitesi, 0.75-7.5KW (1-10 HP) güç aralığındaki direk kalkışlı üç fazlı ikili derin kuyu pompalarının, hidrofor pompalarının ve drenaj pompalarının
YUVARLAMALI YATAKLAR RULMAN TĐPLERĐ
 YUVARLAMALI YATAKLAR RULMAN TĐPLERĐ YUVARLAMALI YATAK ÖMRÜ Genelde rulman katalog ömrü L10 yada B 10 simgeleri ile gösterilir. Sabit bir hızda, dış bilezik sabit ve sabit yükte rulman üzerinde algılanabilir
YUVARLAMALI YATAKLAR RULMAN TĐPLERĐ YUVARLAMALI YATAK ÖMRÜ Genelde rulman katalog ömrü L10 yada B 10 simgeleri ile gösterilir. Sabit bir hızda, dış bilezik sabit ve sabit yükte rulman üzerinde algılanabilir
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 11 1.3 TAŞITLARIN SINIFLANDIRILMASI... 14 1.4 TAŞITA ETKİYEN KUVVETLER... 15 1.5
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 11 1.3 TAŞITLARIN SINIFLANDIRILMASI... 14 1.4 TAŞITA ETKİYEN KUVVETLER... 15 1.5
DİNAMİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
İÇ KUVVETLER. Amaçlar: Bir elemanda kesit yöntemiyle iç kuvvetlerin bulunması Kesme kuvveti ve moment diyagramlarının çizilmesi
 İÇ KUVVETLER maçlar: ir elemanda kesit yöntemiyle iç kuvvetlerin bulunması Kesme kuvveti ve moment diyagramlarının çizilmesi Yapısal elemanlarda oluşan iç kuvvetler ir yapısal veya mekanik elemanın tasarımı,
İÇ KUVVETLER maçlar: ir elemanda kesit yöntemiyle iç kuvvetlerin bulunması Kesme kuvveti ve moment diyagramlarının çizilmesi Yapısal elemanlarda oluşan iç kuvvetler ir yapısal veya mekanik elemanın tasarımı,
TRIGONOMETRI AÇI, YÖNLÜ AÇI, YÖNLÜ YAY
 TRIGONOMETRI AÇI, YÖNLÜ AÇI, YÖNLÜ YAY A. AÇI Başlangıç noktaları aynı olan iki ışının birleşim kümesine açı denir. Bu ışınlara açının kenarları, başlangıç noktasına ise açının köşesi denir. B. YÖNLÜ AÇI
TRIGONOMETRI AÇI, YÖNLÜ AÇI, YÖNLÜ YAY A. AÇI Başlangıç noktaları aynı olan iki ışının birleşim kümesine açı denir. Bu ışınlara açının kenarları, başlangıç noktasına ise açının köşesi denir. B. YÖNLÜ AÇI
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
6. HAFTA DERS NOTLARI İKTİSADİ MATEMATİK MİKRO EKONOMİK YAKLAŞIM. Yazan SAYIN SAN
 6. HAFTA DERS NOTLARI İKTİSADİ MATEMATİK MİKRO EKONOMİK YAKLAŞIM Yazan SAYIN SAN SAN / İKTİSADİ MATEMATİK / 2 A.5. Doğrusal olmayan fonksiyonların eğimi Doğrusal fonksiyonlarda eğim her noktada sabittir
6. HAFTA DERS NOTLARI İKTİSADİ MATEMATİK MİKRO EKONOMİK YAKLAŞIM Yazan SAYIN SAN SAN / İKTİSADİ MATEMATİK / 2 A.5. Doğrusal olmayan fonksiyonların eğimi Doğrusal fonksiyonlarda eğim her noktada sabittir
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ
 BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 12-15 HARMONİK OSİLATÖR
 BÖLÜM 12-15 HARMONİK OSİLATÖR Hemen hemen her sistem, dengeye yaklaşırken bir harmonik osilatör gibi davranabilir. Kuantum mekaniğinde sadece sayılı bir kaç problem kesin olarak çözülebilmektedir. Örnekler
BÖLÜM 12-15 HARMONİK OSİLATÖR Hemen hemen her sistem, dengeye yaklaşırken bir harmonik osilatör gibi davranabilir. Kuantum mekaniğinde sadece sayılı bir kaç problem kesin olarak çözülebilmektedir. Örnekler
Çözümlü Limit ve Süreklilik Problemleri
 Bölüm 5 Çözümlü Limit Süreklilik Problemleri. 2 fonksiyonunun tanım bölgesini = noktasındaki itini bulunuz. Paydanın 0 değerini aldığı = noktasında fonksiyon tanımlı değldir. Tanım bölgesini T (f ) ile
Bölüm 5 Çözümlü Limit Süreklilik Problemleri. 2 fonksiyonunun tanım bölgesini = noktasındaki itini bulunuz. Paydanın 0 değerini aldığı = noktasında fonksiyon tanımlı değldir. Tanım bölgesini T (f ) ile
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta)
") MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
Kalkülüs II (MATH 152) Ders Detayları
 Ders Detayları") Kalkülüs II (MATH 152) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kalkülüs II MATH 152 Güz 4 2 0 5 7.5 Ön Koşul Ders(ler)i Math 151 Kalkülüs I Dersin
Kalkülüs II (MATH 152) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kalkülüs II MATH 152 Güz 4 2 0 5 7.5 Ön Koşul Ders(ler)i Math 151 Kalkülüs I Dersin
Lineer Cebir. Doç. Dr. Niyazi ŞAHİN TOBB. İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler
 Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Şimdi de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor. teoreminini iki kere kullanarak
![Şimdi de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor. teoreminini iki kere kullanarak](/thumbs/17/146647.jpg "Şimdi de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor. teoreminini iki kere kullanarak") 10.Konu İç çarpım uzayları ve özellikleri 10.1. ve üzerinde uzunluk de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor teoreminden dir. 1.Ö.: [ ] ise ( ) ( ) ve ( ) noktaları gözönüne alalım.
10.Konu İç çarpım uzayları ve özellikleri 10.1. ve üzerinde uzunluk de [ ] vektörünün ile gösterilen boyu veya büyüklüğü Pisagor teoreminden dir. 1.Ö.: [ ] ise ( ) ( ) ve ( ) noktaları gözönüne alalım.
DİKKAT! SORU KİTAPÇIĞINIZIN TÜRÜNÜ A OLARAK CEVAP KÂĞIDINIZA İŞARETLEMEYİ UNUTMAYINIZ. MATEMATİK SINAVI MATEMATİK TESTİ
 DİKKAT! SORU KİTAPÇIĞINIZIN TÜRÜNÜ A OLARAK CEVAP KÂĞIDINIZA İŞARETLEMEYİ UNUTMAYINIZ. MATEMATİK SINAVI MATEMATİK TESTİ 1. Bu testte 50 soru vardır.. Cevaplarınızı, cevap kâğıdının Matematik Testi için
DİKKAT! SORU KİTAPÇIĞINIZIN TÜRÜNÜ A OLARAK CEVAP KÂĞIDINIZA İŞARETLEMEYİ UNUTMAYINIZ. MATEMATİK SINAVI MATEMATİK TESTİ 1. Bu testte 50 soru vardır.. Cevaplarınızı, cevap kâğıdının Matematik Testi için
V = g. t Y = ½ gt 2 V = 2gh. Serbest Düşme NOT:
 Havada serbest bırakılan cisimlerin aşağı doğru düşmesi etrafımızda her zaman gördüğümüz bir olaydır. Bu düşme hareketleri, cisimleri yerin merkezine doğru çeken bir kuvvetin varlığını gösterir. Daha önceki
Havada serbest bırakılan cisimlerin aşağı doğru düşmesi etrafımızda her zaman gördüğümüz bir olaydır. Bu düşme hareketleri, cisimleri yerin merkezine doğru çeken bir kuvvetin varlığını gösterir. Daha önceki
Gerilme Dönüşümü. Bölüm Hedefleri
 Gerilme Dönüşümü Bölüm Hedefleri Bu bölümde, belirli bir koordinat sisteminde tanımlı gerilme bileşenlerinin, farklı eğimlere sahip koordinat sistemlerine nasıl dönüştürüleceği üzerinde durulacaktır. Gerekli
Gerilme Dönüşümü Bölüm Hedefleri Bu bölümde, belirli bir koordinat sisteminde tanımlı gerilme bileşenlerinin, farklı eğimlere sahip koordinat sistemlerine nasıl dönüştürüleceği üzerinde durulacaktır. Gerekli
B ol um 5 ANALOG IS ARETLER IN SPEKTRUM ANAL IZ I
 Bölüm 5 ANALOG İŞARETLERİN SPEKTRUM ANALİZİ 10 Bölüm 5. Analog İşaretlerin Spektrum Analizi 5.1 Fourier Serisi Sınırlı (t 1, t 2 ) aralığında tanımlanan f(t) fonksiyonunun sonlu Fourier serisi açılımı
Bölüm 5 ANALOG İŞARETLERİN SPEKTRUM ANALİZİ 10 Bölüm 5. Analog İşaretlerin Spektrum Analizi 5.1 Fourier Serisi Sınırlı (t 1, t 2 ) aralığında tanımlanan f(t) fonksiyonunun sonlu Fourier serisi açılımı
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Hessien Matris-Quadratik Form Mutlak ve Bölgesel Maksimum-Minimum Noktalar Giriş Kısıtlı ve kısıtsız fonksiyonlar için
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Hessien Matris-Quadratik Form Mutlak ve Bölgesel Maksimum-Minimum Noktalar Giriş Kısıtlı ve kısıtsız fonksiyonlar için
Olasılık ve Normal Dağılım
 Olasılık ve Normal Dağılım P = 0 İmkansız P =.5 Yarı yarıya P = 1 Kesin Yazı-Tura 1.5 2 1.5 2.5.5.25 Para atışı 10 kere tekrarlandığında Yazı Sayısı f % 0 3 30 1 6 60 2 1 10 Toplam 10 100 Atış 1000 kere
Olasılık ve Normal Dağılım P = 0 İmkansız P =.5 Yarı yarıya P = 1 Kesin Yazı-Tura 1.5 2 1.5 2.5.5.25 Para atışı 10 kere tekrarlandığında Yazı Sayısı f % 0 3 30 1 6 60 2 1 10 Toplam 10 100 Atış 1000 kere
OTOMOTİV TEKNOLOJİLERİ
 OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde 1. Direnç a. Aerodinamik b. Dinamik, yuvarlanma c. Yokuş 2. Tekerlek tahrik
OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde 1. Direnç a. Aerodinamik b. Dinamik, yuvarlanma c. Yokuş 2. Tekerlek tahrik
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 9B - BURULMA DENEYİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 9B - BURULMA DENEYİ GİRİŞ Mekanik tasarım yaparken öncelikli olarak tasarımda kullanılması düşünülen malzemelerin
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 9B - BURULMA DENEYİ GİRİŞ Mekanik tasarım yaparken öncelikli olarak tasarımda kullanılması düşünülen malzemelerin
İÇİNDEKİLER ÖNSÖZ Bölüm 1 KÜMELER Bölüm 2 SAYILAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı. Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
2. SİMETRİK GRUPLAR. Tanım 2.1. X boş olmayan bir küme olmak üzere X den X e birebir örten fonksiyona permütasyon denir.
 2. SİMETRİK GRUPLAR Tanım 2.1. X boş olmayan bir küme olmak üzere X den X e birebir örten fonksiyona permütasyon denir. Tanım 2.2. X boş olmayan bir küme olsun. S X ile X den X e tüm birebir örten fonksiyonlar
2. SİMETRİK GRUPLAR Tanım 2.1. X boş olmayan bir küme olmak üzere X den X e birebir örten fonksiyona permütasyon denir. Tanım 2.2. X boş olmayan bir küme olsun. S X ile X den X e tüm birebir örten fonksiyonlar
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
MUKAVEMET HESAPLARI : ÇİFT KİRİŞLİ GEZER KÖPRÜLÜ VİNÇ
 MUKAVEMET HESAPLARI ÜRÜN KODU MAKİNA ADI : 20+5 TON : ÇİFT KİRİŞLİ GEZER KÖPRÜLÜ VİNÇ İÇİNDEKİLER ÇELİK YAPI ANALİZİ (VİNÇ KÖPRÜSÜ) TEKER HESAPLARI HALAT HESAPLARI KANCA BLOĞU HESABI TAMBUR HESAPLARI SAYFA
MUKAVEMET HESAPLARI ÜRÜN KODU MAKİNA ADI : 20+5 TON : ÇİFT KİRİŞLİ GEZER KÖPRÜLÜ VİNÇ İÇİNDEKİLER ÇELİK YAPI ANALİZİ (VİNÇ KÖPRÜSÜ) TEKER HESAPLARI HALAT HESAPLARI KANCA BLOĞU HESABI TAMBUR HESAPLARI SAYFA
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
GERİLME Cismin kesilmiş alanı üzerinde O
 GERİLME Cismin kesilmiş alanı üzerinde O ile tanımlı noktasına etki eden kuvvet ve momentin kesit alana etki eden gerçek yayılı yüklerin bileşke etkisini temsil ettiği ifade edilmişti. Cisimlerin mukavemeti
GERİLME Cismin kesilmiş alanı üzerinde O ile tanımlı noktasına etki eden kuvvet ve momentin kesit alana etki eden gerçek yayılı yüklerin bileşke etkisini temsil ettiği ifade edilmişti. Cisimlerin mukavemeti
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
DİŞLİ ÇARKLAR II: HESAPLAMA
 DİŞLİ ÇARLAR II: HESAPLAMA Prof. Dr. İrfan AYMAZ Atatürk Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Giriş Bu bölüm sonunda öğreneceğiniz konular: Dişli Çark uvvetleri Diş Dibi Gerilmeleri
DİŞLİ ÇARLAR II: HESAPLAMA Prof. Dr. İrfan AYMAZ Atatürk Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü Giriş Bu bölüm sonunda öğreneceğiniz konular: Dişli Çark uvvetleri Diş Dibi Gerilmeleri
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
İçindekiler. Ön Söz... xiii
 İçindekiler Ön Söz.................................................... xiii Bölüm 1 İstatistiğe Giriş....................................... 1 1.1 Giriş......................................................1
İçindekiler Ön Söz.................................................... xiii Bölüm 1 İstatistiğe Giriş....................................... 1 1.1 Giriş......................................................1