Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
|
|
|
- Melek Uçar
- 5 yıl önce
- İzleme sayısı:
Transkript



1 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç.





2 Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Şekil No Tablo numarası Dikkat Doç. Bölüm 1 2
3 içerik: Diferansiyel denklemler Laplace Dönüşümü Laplace kullanılarak eşitliklerin çözümü Kesirlere ayırma yöntemi Cevap parametreleri ve kararlılık Transfer fonksiyonu Impuls ve pay dinamikleri Uygulama örnekleri MATLAB ile katsayı hesaplama MATLAB ile transfer fonksiyonu analizi 3
4 Giriş: Dinamik modeller, bir dinamik sistemi tanımlayan diferansiyel denklemlerdir. Bu bölümde mühendislik uygulamalarında sık kullanılan diferansiyel denklemlerin analitik çözümleri üzerinde durulacaktır. 4
5 2.1.Diferansiyel Denklemler: 5
6 ODE (ordinary differential equation) adi diferansiyel denklemler kısmi türevler içermeyen denklemlerdir. Çünkü sistem dinamikleri zamana bağlıdır. ODE lerin bağımsız değişkeni zaman (t) parametresi olacaktır. 6
7 Tanımlar: Tüm fonksiyonların bağımlı değişkenleri eşitliğin sol yanında ve tüm izole sabitler ve izole fonksiyonlar ise eşitliğin sağ yanında yer alır. Eşitliğin sağ yanına giriş yada zorlama fonksiyonu denir. Zamana bağlı bağımlı değişken çözüm yada yanıt (cevap) adını alır. Bağımlı değişken x(t): Yanıt veya çözüm Cevap veya giriş 7
8 Başlangıç koşulları: ODE Çözüm x(t) yi bulmak x(t)=ce -3t +0.5 C:sabit Herhangi bir anda x in özel bir değerini bilmiyor isek C bulunamaz. t 0 : t=0 anı (başlangıç zamanı) x 0 : başlangıç koşulu (t 0 anında x in değeri) 8
9 Diferansiyel denklemlerin sınıflandırılması: Diferansiyel denklemleri lineer ve nonlineer olarak sınıflandırabiliriz. Lineer dif. denklemde; bağımlı değişkenler ve bunların türevleri lineer fonksiyonlardır. Bağımsız değişkenin nonlineer fonksiyonu bir diferansiyel denklemi nonlineer yapmaz (aşağıdaki örneklerde t bağımsız değişken). Aşağıdaki denklemler lineerdir: 9
10 Diferansiyel denklemlerin sınıflandırılması: Aşağıdaki denklemler nonlineerdir. 10
11 Değişken ve sabit katsayılı dif. denklem: Değişken katsayılı dif. denklem Sabit katsayılı dif. denklem Sabit katsayılı dif. denklemleri çözerken başlangıç koşulları genelde 0 alınır. Bu çözümü basitleştirir. bağımlı değişkenin en yüksek dereceli türevinin derecesi denklemin derecesi kabul edilir. Aşağıda 2. derece bir dif. denklem verilmiştir. Bağlı (kuple=coupled) diferansiyel denklem 11

12 Direk integrasyon ile çözüm: 12
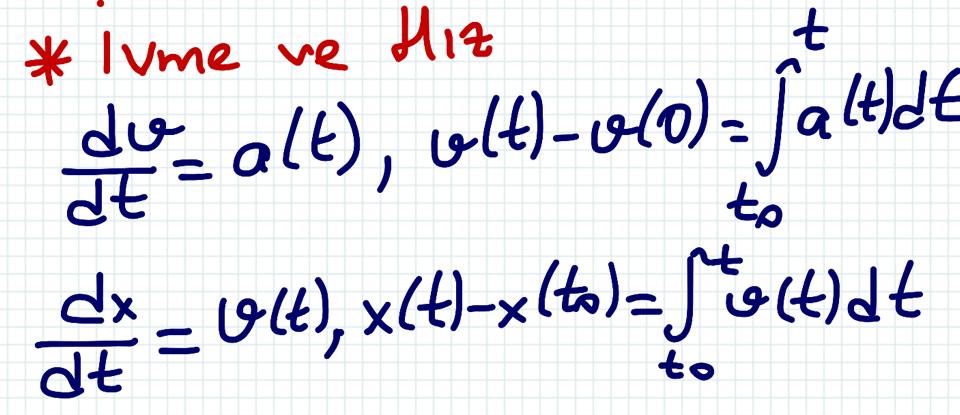
13 13

14 Değişkenlerin ayrılması: 14

15 Örnek
16 Şekil
17 Kökler ve Kompleks Sayılar: Tablo Kökler ve kompleks sayılar 17
18 Kökler ve Kompleks Sayılar: 18
19 Şekil Şekil
20 Tablo Eksponansiyel Fonksiyon 20
21 2.5. Cevap Parametreleri ve Kararlılık 21
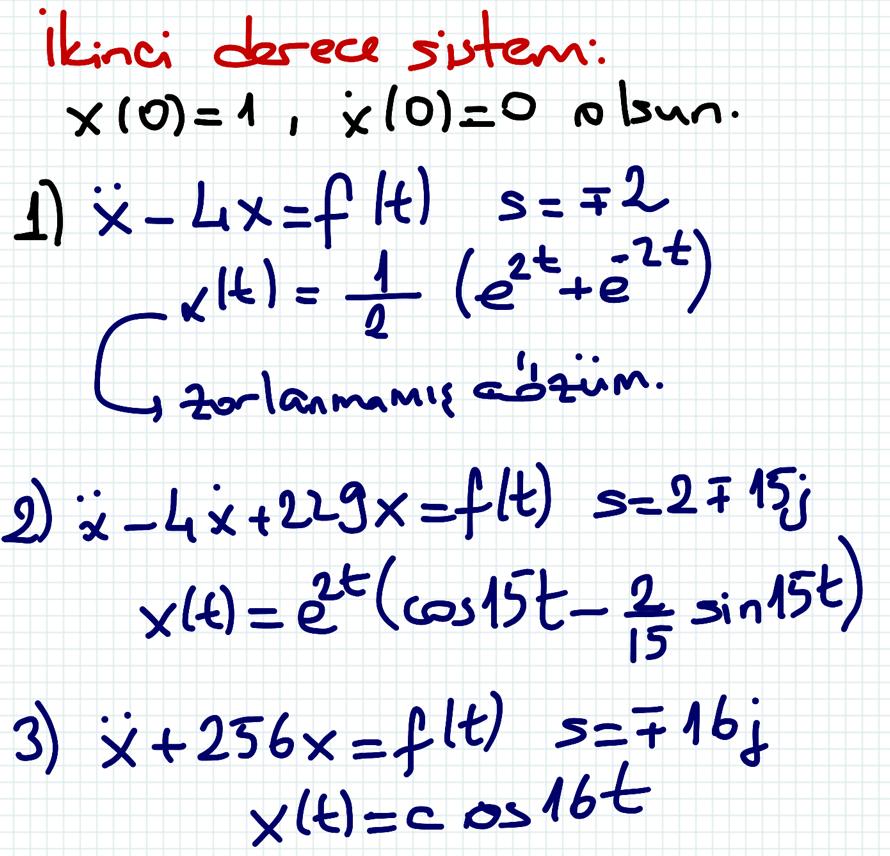
22 Giriş: Genel olarak sistem dinamiklerindeki diferansiyel denklemler lineer ve sabit katsayılıdır. Herbiri genel olarak sağ-yanlıdır. Temel olarak birinci derece ve ikinci derece olmak üzere iki tipte bulunur: Birinci derece: İkinci derece: 22
23 Tablo Sabit bir giriş için Çözüm Formları 23
24 Sistem davranışının (cevap veya çözüm=response) değerlendirilmesi: 24
25 Sistem cevabının yorumu: Osilasyon Eksponansiyel azalma Sonuç 25
26 26
27 Zaman Sabiti (Time Constant) 27
28 Birinci dereceden sistem cevabı: Aşağıdaki formda tekrar yazarsak: : zaman sabiti olmak üzere: Zaman sabiti, sistemin geçici durumu ve kalıcı hale ne zaman ulaşacağı konusunda bilgi verir. 28
29 Zaman Sabiti: 4 Şekil Sistem cevabı MKT3131 Sistem Dinamiği 29
30 Zaman sabiti: Zorlanmış fonksiyon sabit ise; 30
31 Zaman sabiti: t=4tao sürede %98 kararlı hale gelir, t=5tao sürede ise %99 kararlı hale gelir. Buradaki fark çok küçük olduğundan genellikle mühendislik problemlerinde 4Tao süre kararlı hale gelme süresi olarak tanımlanır. Diğer yandan x(t) fonksiyonu sonsuza kadar tam olarak kararlı hale oturmayacaktır. 31
32 Örnek 2.5.1: Tablo den 32
33 Baskın kök yaklaşımı (Dominant root approximation): 33
34 Dominant kutup ve dominant zaman sabiti: Örnek de iki adet geçici zaman yanıt terimi vardır. Bunlar e -2t ve e -5t dir. x(t) nin zaman yanıtı incelenir ise e -2t nin diğer terime göre daha geç 0 a gittiği görülür. Yani bu terim zaman yanıtını daha çok etkiler. Bu nedenle bu terime baskın kutup adı verilir. Aynı terimin zaman sabitine ise baskın zaman sabiti denir. Ancak unutulmaması gereken bu terimlerin C 1 ve C 2 katsayılarının birbirine göre durumlarının da dikkate alınması gerekliliğidir. Geçici durum yaklaşık olarak ne zaman tamamlanacaktır??? 4Tao sürede. t=4x(1/2)=2 sn 34
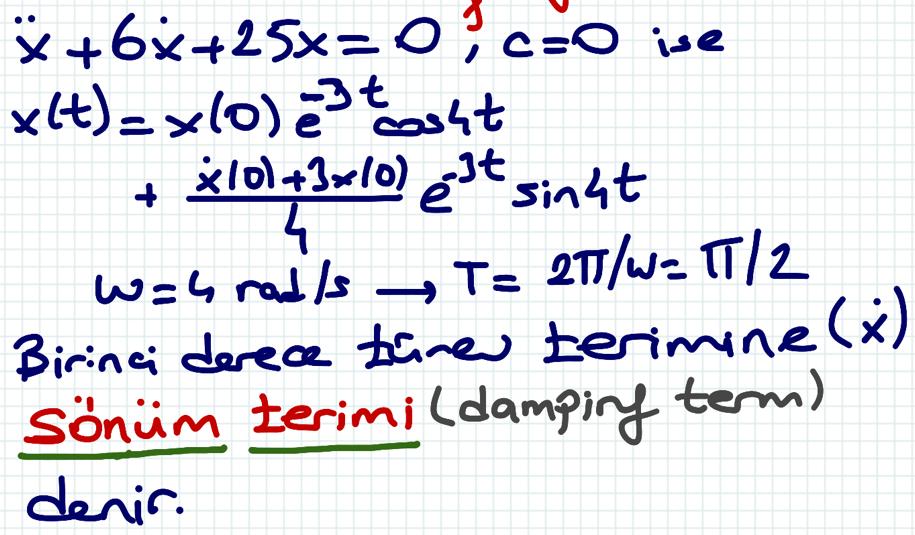
35 Örnek (3.2.3 for 2nd Ed.):İkinci derece sistem cevabı, Kompleks Kökler 35
36 Örnek için sistem cevabı: Örnek c=0, x(0)=10, dx(0)/dt=0 Kökün negatif gerçek kısmının etkisi 1,33 Her çift aynı zaman sabitine sahip 36
37 Zaman sabitleri ve Kompleks Kökler 37
38 Örnek: İkinci derece, İmajiner Kökler 38
39 Doğal Frekans (Natural Frequency): 39

40 Doğal Frekans Tanımı: 40
41 Doğal frekans tanımının yorumu: Sistem cevabı sabit genlikli bir osilasyon sinyalidir. Genlik başlangıç koşullarına bağlıdır. Osilasyon frekansı ve periyot başlangıç koşullarından bağımsızdır. 41

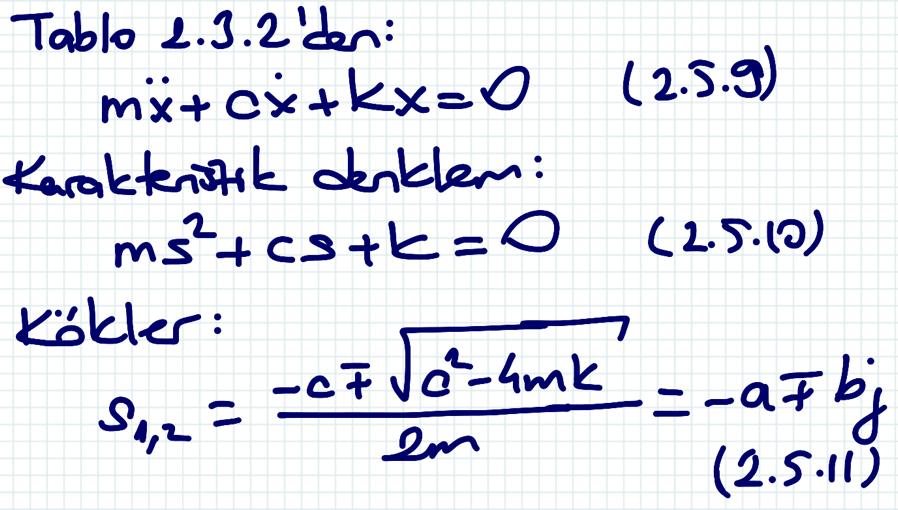
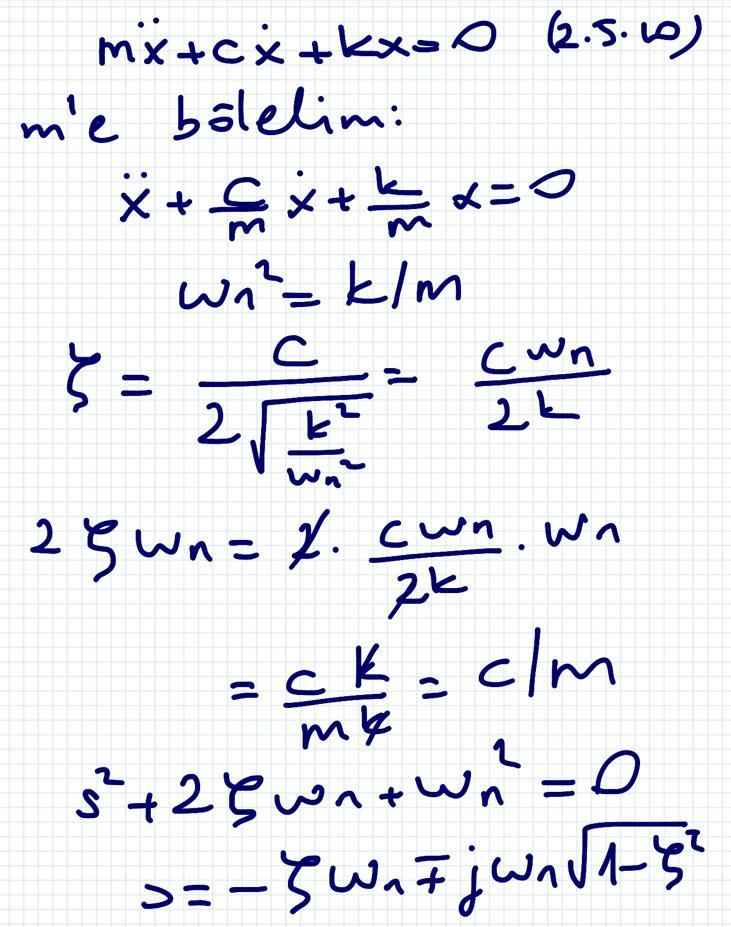
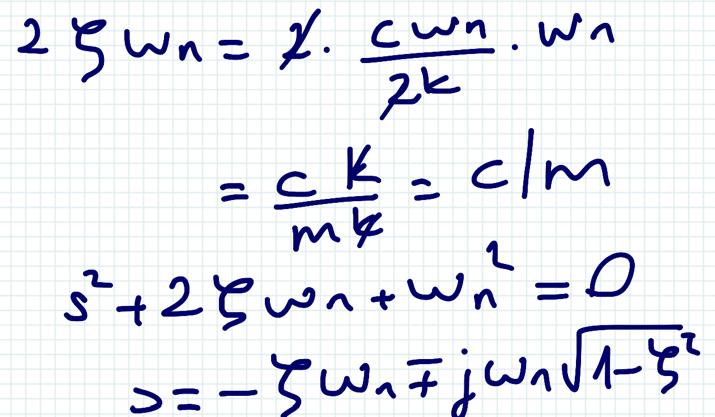
42 Sönümlü(bastırılmış) doğal frekans (damped natural frequency) 42
43 43
44 44

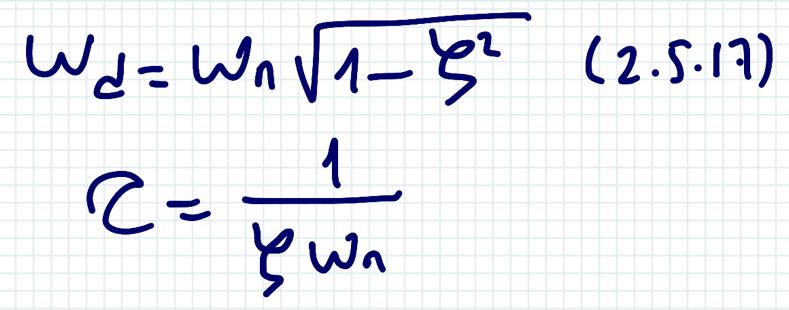
45 Sönümlü doğal frekans 45

46 46
47 Sönümlü doğal frekansın yorumu: En büyük osilasyon frekansı c=0 da mümkündür. Bu durumda w n =w d olur. Eğer c yeterince büyük ise w d sıfır veya imajinerdir. Kökler reeldir ve osilasyon yoktur. w d =0 ve kökler reel ve birbirine eşit ise bu değer kritik sönüm değeri olarak adlandırılır. Eğer c>2sqrt(mk) ise cevap eksponansiyel Eğer c<2sqrt(mk) ise cevap osilasyon yapan bir sinyaldir. 47
48 2.5.7 Sönüm Oranı (Damping Ratio): 48

49 Sönüm oranı: Eğer iki kökte negatif veya negatif gerçek kısıma sahip ise 2. derece sistemin zorlanmamış cevabı sönüm oranı tarafından karakterize edilir. Bazen sönüm faktörü olarak da adlandırılabilir. 49
50 Sönüm oranı: Sönüm oranı bize sistem cevabının karakterini kolayca yorumlamamıza yardım eder. 50
51 51
52 52
53 53

54 Tablo İkinci derece modellerin cevap parametreleri: 54

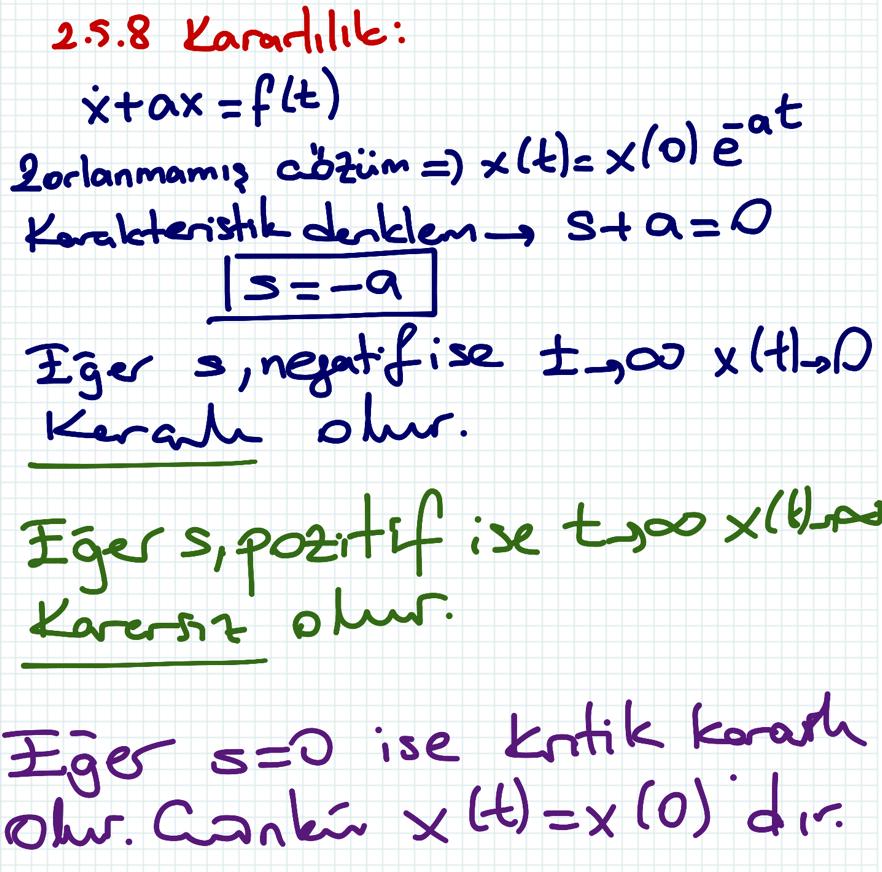
55 2.5.8 Kararlılık (Stability): 55
56 Kararlılık ile ilgili kavramlar: Kararsız (unstable): Bir sistemin zorlanmamış cevabı, zaman sonsuza gittikçe sonsuza gidiyor ise o sistem kararsızdır. Kararlı (stable): (asimptotik kararlı da denir) Bir sistemin zorlanmamış cevabı, zaman sonsuza gittikçe 0 a yaklaşıyor ise o sistem kararlıdır. 56
57 Kararlılık ile ilgili kavramlar: Kritik kararlı (critically stable=neutral stability): Sistemin zorlanmamış cevabı kararlılık ve kararsızlık sınırında ise sistem kritik kararlıdır. Sistemin zorlanmamış çözümü sonsuza veya 0 a yaklaşmaz. 57
58 Bir sistemin kararlılığı karakteristik denklemin kökleri incelenerek tespit edilir. 58
59 59
60 60
61 2. derece sistem yorumları: Şekil
62 Lineer sabit katsayılı modellerin kararlılık testi: Bir modelin herhangi bir kökü pozitif reel kısma sahip ise kararsızdır. Bir model sadece ve sadece karakteristik denkleminin tüm kökleri negatif reel kısma sahip ise kararlılıdır. Bir modelin gerçek kısımları sıfır olmak üzere imajiner eksen üzerinde en az bir katsız kök bulunması ancak katlı kök bulunmaması ve sağ yarı düzlemde hiçbir kökün bulunmaması durumunda kritik kararlıdır. 62
63 Sarkaç örneği: 63
64 Sarkaç hareketinin kararlılık açısından yorumu: Sürtünme yok ise kritik kararlı dır. Sürtünme var ise sistem başlangıç pozisyonuna döner. Kararlıdır. Şekil
65 Routh-Hurwitz Durumu: 65
66 Routh-Hurwitz Kriteri: Karakteristik denklemi ms 2 +cs+k=0 formunda olan sistemler için m, c ve k katsayılarının işaretleri aynı ise sistem kararlıdır. 66
67 Kararlılık ve denge (equilibrium) 67
68 Değişiklik olmama durumuna denge denir. Sarkaç eğer menzili teta=pi ise teta=0 derece konumunda dengededir. Teta=0 da dengede kararlıdır. Teta=pi denge konumunda ise kararsızdır. Bu durum bize farklı denge durumlarında kararlılığın değişebildiğini göstermektedir. Dolayısı ile sistemin tek başına fiziksel özelliklerine göre değil dengede bulunduğu yerlere göre kararlılık yorumlanmalıdır. 68
69 Lokal ve global kararlılık: Vadi denge Tepe denge Vadinin alt ucunda sürtünme yok ise top sonsuza kadar salınır. Kritik kararlı. Eğer sürtünme var ise vadi tabanında durur. Kararlı. Sürtünme var ise vadi dengesi lokal kararlı fakat global kararsız. Çünkü büyük bir kuvvet ile biz vadiden topu dışarı gönderirsek asla dönmeyecektir. Bir dengenin global kararlı olması için sistemin başlangıç koşullarına dönüş şarttır. Tepe noktada ise denge global kararsızdır. Lineer modeller için kararlılık analizi karakteristik denklemin kökleri kullanılarak global anlamda yapılabilir. Ancak nonlineer sistemler bu inceleme lokal kararlılığı verilen bir denge noktası civarında yapılabilir. 69
70 2.6. TRANSFER FONKSİYONU 70
71 Transfer fonksiyonu: dx/dt+ax=f(t) (2.6.1) x(0)=0 kabul edelim. sx(s)+ax(s)=f(s) T(s)=X(s)/F(s) T(s): Transfer fonksiyonu Transfer fonksiyonunun paydası karakteristik denklemdir. Sistem kararlılığı buradan analiz edilir. Birden fazla giriş ve çıkış olan sistemlerde (MIMO) transfer fonksiyonları girişler için ayrı ayrı elde edilir. Sadece bir giriş aktif edilerek çıkışlar bulunur. Daha sonra süperpozisyon yaklaşımı uygulanır. 71

72 Örnek

73 Çözüm 2.6.2: 73

74 Çözüm 2.6.2: 74

75 Çözüm 2.6.2: 75
76 2.7. Impuls ve pay dinamikleri: 76
77 2.7.1 Impuls Şekil Darbenin kuvveti L Hospital Limit Kuralı: Eğer A= 1 ise birim impuls adını alır. Dirac delta olarak da adlandırılır ve dinamik sistem analizinde sık kullanılır. 77
78 Pay dinamikleri: Giriş (g(t)) nin türevi transfer fonksiyonunun payına bir s terimi ekledi. Bu tip modellere pay dinamiklerine sahiptir denir. Eğer g(t), u s (t) ise 78
79 2.8. Ek örnekler: Örnek Örnek Örnek Örnek Örnek Örnek Örnek
80 Örnek

81 Örnek
82 nin özeti: 82
83 Diferansiyel denklemler ve Laplace transformasyonu Zorlanmamış, zorlanmış, geçici hal ve kalıcı hal yanıtları İmpuls giriş ve girişin türevlerinin sistem cevabına etkileri Doğal frekans, sönüm oranı, zaman sabiti Kararlılık 83


84 Referans: System Dynamics, William Palm III, McGraw-Hill Education; 3 edition (March 19, 2013)
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Sistem Dinamiği. Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem
Sistem Dinamiği Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
Sistem Dinamiği. Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Ders #9. Otomatik Kontrol. Kararlılık (Stability) Prof.Dr.Galip Cansever. 26 February 2007 Otomatik Kontrol. Prof.Dr.
 Prof.Dr.Galip Cansever. 26 February 2007 Otomatik Kontrol. Prof.Dr.") Der #9 Otomatik Kontrol Kararlılık (Stability) 1 Kararlılık, geçici rejim cevabı ve ürekli hal hataı gibi kontrol taarımcıının üç temel unurundan en önemli olanıdır. Lineer zamanla değişmeyen itemlerin
Der #9 Otomatik Kontrol Kararlılık (Stability) 1 Kararlılık, geçici rejim cevabı ve ürekli hal hataı gibi kontrol taarımcıının üç temel unurundan en önemli olanıdır. Lineer zamanla değişmeyen itemlerin
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
biçimindeki ifadelere iki değişkenli polinomlar denir. Bu polinomda aynı terimdeki değişkenlerin üsleri toplamından en büyük olanına polinomun dereces
 TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER
 İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER 1.1. Fiziksel Kanunlar ve Diferensiyel Denklemler Arasındaki İlişki... 1 1.2. Diferensiyel Denklemlerin Sınıflandırılması ve Terminoloji...
İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER 1.1. Fiziksel Kanunlar ve Diferensiyel Denklemler Arasındaki İlişki... 1 1.2. Diferensiyel Denklemlerin Sınıflandırılması ve Terminoloji...
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında
![Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında](/thumbs/92/109134106.jpg "Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında") Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI. Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Alıştırmalar 1. 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.
 Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.") Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
PID SÜREKLİ KONTROL ORGANI:
 PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
Ç NDEK LER II. C LT KONULAR Sayfa Öz De er Öz Vektör.. 2. Lineer Cebir ve Sistem Analizi...
 ÇNDEKLER II. CLT KONULAR 1. Öz Deer Öz Vektör.. 1 Kare Matrisin Öz Deeri ve Öz Vektörleri... 21 Matrisin Karakteristik Denklemi : Cayley Hamilton Teoremi.. 26 Öz Deer - Öz Vektör ve Lineer Transformasyon
ÇNDEKLER II. CLT KONULAR 1. Öz Deer Öz Vektör.. 1 Kare Matrisin Öz Deeri ve Öz Vektörleri... 21 Matrisin Karakteristik Denklemi : Cayley Hamilton Teoremi.. 26 Öz Deer - Öz Vektör ve Lineer Transformasyon
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
Şeklinde çok sayıda diferansiyel denklemden oluşan denklem sistemleridir. Denklem sayısı = bağımlı değişken eşitliği sağlanmasıdır.
 5. Diferansiyel Denklem Sistemleri ve Çözüm Yöntemleri X=bağımsız, Y, Z, W = bağımlı değişkenler olmak üzere; Y= (X, Y, Y, Y,, Z, Z, Z,, W, W, W, ) Z= (X, Y, Y, Y,, Z, Z, Z,, W, W, W, ) W= (X, Y, Y, Y,,
5. Diferansiyel Denklem Sistemleri ve Çözüm Yöntemleri X=bağımsız, Y, Z, W = bağımlı değişkenler olmak üzere; Y= (X, Y, Y, Y,, Z, Z, Z,, W, W, W, ) Z= (X, Y, Y, Y,, Z, Z, Z,, W, W, W, ) W= (X, Y, Y, Y,,
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Analog Alçak Geçiren Filtre Karakteristikleri
 Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Diferansiyel Denklemler (MATH 276) Ders Detayları
 Ders Detayları") Diferansiyel Denklemler (MATH 276) Ders Detayları Ders Adı Diferansiyel Denklemler Ders Kodu MATH 276 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 4 0 0 4 6 Ön Koşul Ders(ler)i Math
Diferansiyel Denklemler (MATH 276) Ders Detayları Ders Adı Diferansiyel Denklemler Ders Kodu MATH 276 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 4 0 0 4 6 Ön Koşul Ders(ler)i Math
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS DİFERANSİYEL DENKLEMLER FEB-211 2/ 1.YY 3+0+0 3 3 Dersin Dili Dersin Seviyesi
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS DİFERANSİYEL DENKLEMLER FEB-211 2/ 1.YY 3+0+0 3 3 Dersin Dili Dersin Seviyesi
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
SAYISAL KARARLILIK. Zaman Uzayı Sonlu Farklar Yöntemi
 Dr. Serkan Aksoy SAYISAL KARARLILIK Sayısal çözümlerin kararlı olması zorunludur. Buna göre ZUSF çözümleri de uzay ve zamanda ayrıklaştırma kapsamında kararlı olması için kararlılık koşullarını sağlaması
Dr. Serkan Aksoy SAYISAL KARARLILIK Sayısal çözümlerin kararlı olması zorunludur. Buna göre ZUSF çözümleri de uzay ve zamanda ayrıklaştırma kapsamında kararlı olması için kararlılık koşullarını sağlaması
Diferansiyel Denklemler (MATH 276) Ders Detayları
 Ders Detayları") Diferansiyel Denklemler (MATH 276) Ders Detayları Ders Adı Diferansiyel Denklemler Ders Kodu MATH 276 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 4 0 0 4 6 Ön Koşul Ders(ler)i Math
Diferansiyel Denklemler (MATH 276) Ders Detayları Ders Adı Diferansiyel Denklemler Ders Kodu MATH 276 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 4 0 0 4 6 Ön Koşul Ders(ler)i Math
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
Sistem Dinamiği. Bölüm 1- Sistem Dinamiğine Giriş. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Sistem Dinamiğine Giriş Doç.Dr. Erhan AKDOĞAN Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil
Sistem Dinamiği - Sistem Dinamiğine Giriş Doç.Dr. Erhan AKDOĞAN Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Bir özvektörün sıfırdan farklı herhangi bri sabitle çarpımı yine bir özvektördür.
 ÖZDEĞER VE ÖZVEKTÖRLER A n n tipinde bir matris olsun. AX = λx (1.1) olmak üzere n 1 tipinde bileşenleri sıfırdan farklı bir X matrisi için λ sayıları için bu denklemi sağlayan bileşenleri sıfırdan farklı
ÖZDEĞER VE ÖZVEKTÖRLER A n n tipinde bir matris olsun. AX = λx (1.1) olmak üzere n 1 tipinde bileşenleri sıfırdan farklı bir X matrisi için λ sayıları için bu denklemi sağlayan bileşenleri sıfırdan farklı
Fizik 101: Ders 23 Gündem
 Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
FİZ217 TİTREŞİMLER VE DALGALAR DERSİNİN 2. ARA SINAV SORU CEVAPLARI
 1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Sistem Dinamiği. Bölüm 6. Elektrik ve Elektromekanik Sistemler. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
İÇİNDEKİLER. Ön Söz...2. Adi Diferansiyel Denklemler...3. Birinci Mertebeden ve Birinci Dereceden. Diferansiyel Denklemler...9
 İÇİNDEKİLER Ön Söz... Adi Diferansiyel Denklemler... Birinci Mertebeden ve Birinci Dereceden Diferansiyel Denklemler...9 Homojen Diferansiyel Denklemler...15 Tam Diferansiyel Denklemler...19 Birinci Mertebeden
İÇİNDEKİLER Ön Söz... Adi Diferansiyel Denklemler... Birinci Mertebeden ve Birinci Dereceden Diferansiyel Denklemler...9 Homojen Diferansiyel Denklemler...15 Tam Diferansiyel Denklemler...19 Birinci Mertebeden
ÜNİTE. MATEMATİK-1 Doç.Dr.Erdal KARADUMAN İÇİNDEKİLER HEDEFLER ÖZDEŞLİKLER, DENKLEMLER VE EŞİTSİZLİKLER
 HEDEFLER İÇİNDEKİLER ÖZDEŞLİKLER, DENKLEMLER VE EŞİTSİZLİKLER Özdeşlikler Birinci Dereceden Bir Bilinmeyenli Denklemler İkinci Dereceden Bir Bilinmeyenli Denklemler Yüksek Dereceden Denklemler Eşitsizlikler
HEDEFLER İÇİNDEKİLER ÖZDEŞLİKLER, DENKLEMLER VE EŞİTSİZLİKLER Özdeşlikler Birinci Dereceden Bir Bilinmeyenli Denklemler İkinci Dereceden Bir Bilinmeyenli Denklemler Yüksek Dereceden Denklemler Eşitsizlikler
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
Matematikte karşılaştığınız güçlükler için endişe etmeyin. Emin olun benim karşılaştıklarım sizinkilerden daha büyüktür.
 - 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
- 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
Diferansiyel Denklemler (MATH 276) Ders Detayları
 Ders Detayları") Diferansiyel Denklemler (MATH 276) Ders Detayları Ders Adı Diferansiyel Denklemler Ders Kodu MATH 276 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 4 0 0 4 6 Ön Koşul Ders(ler)i Math
Diferansiyel Denklemler (MATH 276) Ders Detayları Ders Adı Diferansiyel Denklemler Ders Kodu MATH 276 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 4 0 0 4 6 Ön Koşul Ders(ler)i Math
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
2. Sunum: Birinci ve İkinci Mertebeden Geçici Devreler
 2. Sunum: Birinci ve İkinci Mertebeden Geçici Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN- R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Geçici analizden kastedilen bir anahtarın
2. Sunum: Birinci ve İkinci Mertebeden Geçici Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN- R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Geçici analizden kastedilen bir anahtarın
EEM 307 Güç Elektroniği
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
İstatistik ve Olasılık
 İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
GÜZ DÖNEMİ ARASINAV SORULARI. 1. Sayısal çözümleme ve fonksiyonu tanımlayarak kullanıldığı alanları kısaca açıklayınız?
 MAK 05 SAYISAL ÇÖZÜMLEME S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ K F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A şubesi B
MAK 05 SAYISAL ÇÖZÜMLEME S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ K F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A şubesi B
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS. Diferansiyel Denklemler EEE
 DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Diferansiyel Denklemler EEE209 3 4+0 4 6 Ön Koşul Dersleri Dersin Dili Dersin Seviyesi Dersin Türü İnigilizce Lisans Zorunlu / Yüz Yüze
DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Diferansiyel Denklemler EEE209 3 4+0 4 6 Ön Koşul Dersleri Dersin Dili Dersin Seviyesi Dersin Türü İnigilizce Lisans Zorunlu / Yüz Yüze
Elektromanyetik Dalga Teorisi
 Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
8.04 Kuantum Fiziği Ders XII
 Enerji ölçümünden sonra Sonucu E i olan enerji ölçümünden sonra parçacık enerji özdurumu u i de olacak ve daha sonraki ardışık tüm enerji ölçümleri E i enerjisini verecektir. Ölçüm yapılmadan önce enerji
Enerji ölçümünden sonra Sonucu E i olan enerji ölçümünden sonra parçacık enerji özdurumu u i de olacak ve daha sonraki ardışık tüm enerji ölçümleri E i enerjisini verecektir. Ölçüm yapılmadan önce enerji
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
DERS ÖĞRETİM PROGRAMI FORMU
 DERS ÖĞRETİM PROGRAMI FORMU Dersin Adı Kodu Normal Kredisi ECTS Ders 4 Yarıyılı Kredisi uygulama 0 Diferansiyel Denklemler 0252311 3 4 6 Laboratuvar 0 (Saat/Hafta) Dersin Dili Türkçe Dersin Türü Zorunlu
DERS ÖĞRETİM PROGRAMI FORMU Dersin Adı Kodu Normal Kredisi ECTS Ders 4 Yarıyılı Kredisi uygulama 0 Diferansiyel Denklemler 0252311 3 4 6 Laboratuvar 0 (Saat/Hafta) Dersin Dili Türkçe Dersin Türü Zorunlu
İÇİNDEKİLER ÖNSÖZ Bölüm 1 KÜMELER Bölüm 2 SAYILAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
İÇİNDEKİLER. Bölüm 2 CEBİR 43
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel