Jeodezide Koordinat Sistemleri Ders Kodu:
|
|
|
- Bilge Engin
- 5 yıl önce
- İzleme sayısı:
Transkript
1 Jeodezide Koordinat Sistemleri Ders Kodu: (4. Yarıyıl) Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya
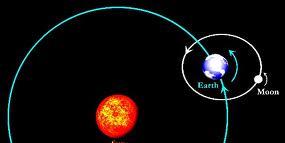
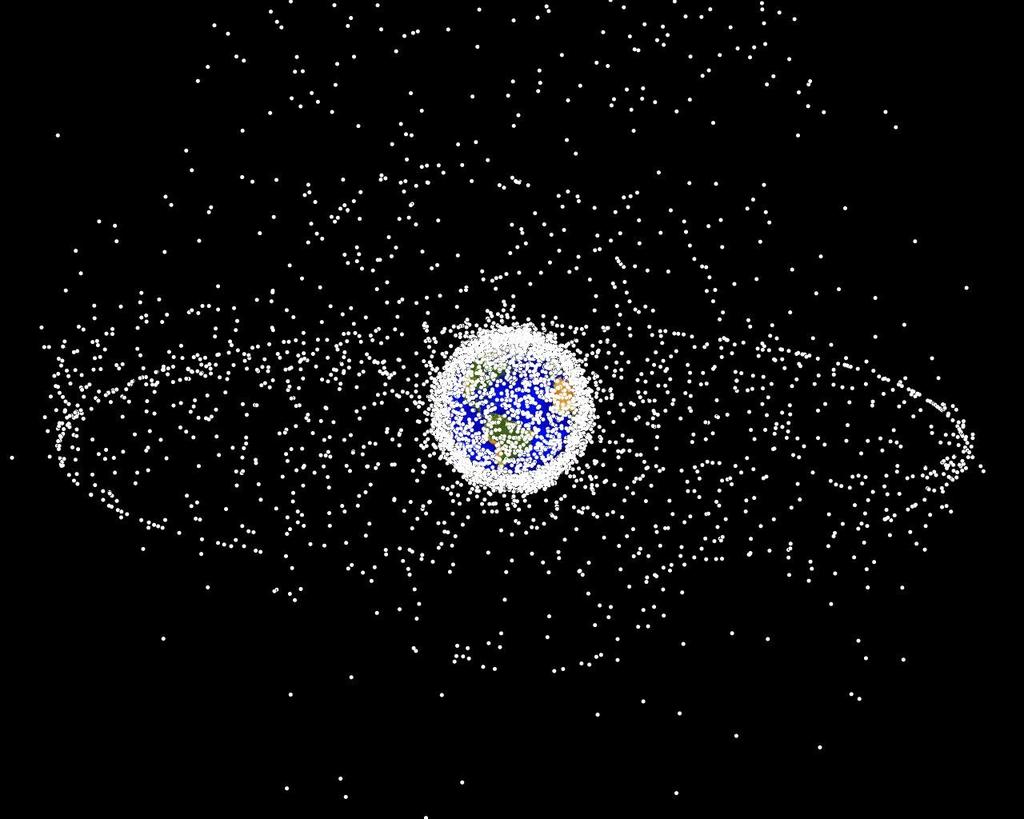
2 Giriş Bu bölümde; koordinat sistemlerinin tanımı, aralarındaki ilişkiler ve dönüşümler tartışılacaktır. Öncelikle, bir koordinat sistemini tanımlamak için gereken üç özellik bulunmaktadır. Bunlar: Başlangıç noktasının(orijin) konumu, Koordinat eksenlerinin yönelimleri/yönleri, Koordinat sistemine ait bir noktanın yerini belirlemeye yarayan parametreler olarak sıralanabilir. Yerküre uzayda iki farklı periyodik harekete sahiptir. Bunlardan ilki, kendi ekseni etrafında dönmesi(rotate), diğeri Güneş in etrafında dönmesidir(revolve). Bu hareketlerden başka üçüncü bir tür periyodik hareket olarak doğal uydumuz Ay ın ve uzayda bulunan çok sayıdaki yapay uydunun yerküre etrafındaki yörüngesel hareketi sayılabilir. Bu periyodik hareketler, koordinat ve zaman sistemlerinin tanımlanmasının temelini oluşturur. 2 2




3 Giriş 3 3



4 2/16/2015 Giriş S. Doğanalp Jeodezide Koordinat Sistemleri 4 4
5 Giriş Uzayda herhangi bir nokta x, y, z dikveya r, θ, λ kutupsal koordinatlarla gösterilir. Bir noktanın koordinat değerleri bu sistemlerden herhangi birinde verilmişse, aynı noktanın diğer sistemdeki değerleri hesaplanabilir. Dik ve kutupsal koordinatlar arasındaki ilişki; 5 5
6 Giriş Ayrıca başlangıç noktasının konumuna göre koordinat sistemlerini aşağıdaki şekilde sınıflandırmak mümkündür: Toposentrik(Başlangıç noktası gözlem yeri) Jeosentrik(Başlangıç noktası yerin merkezi) Helyosentrik(Başlangıç noktası Güneşin merkezi) Barisentrik(Başlangıcı bir grup gök cisminin ağırlık merkezi; örneğin güneş sistemi veya yeryuvarı-ay sistemi gibi) Galaktosentrik(Başlangıç noktası Samanyolu sisteminin merkezi) 6 6
7 Giriş Genel olarak, jeodezik açıdan bakıldığında çeşitli koordinat sistemleri kullanılır. Bu çeşitlilik, jeodezik problemlerin yapılarına uygun olarak artar. En genel anlamda koordinat sistemleri üç ana başlık altında toplanabilir: a) Yersel(Terrestrial) Koordinat Sistemleri(YKS) b) Göksel(Celestial) Koordinat Sistemleri(GKS) c) Yörüngesel(Orbital) Koordinat Sistemleri(OKS) Yersel koordinat sistemleri, yere göre sabit ve yerküre ile birlikte dönerler. Yeryüzü üzerindeki noktaların konumlarının ve hareketlerinin belirlenmesi için kullanılırlar. Jeosentrik ve Toposentrik sistem olarak sınıflandırılırlar. Göksel koordinat sistemleri, Güneş, yıldız gibi gök cisimlerinin koordinatlarının belirlenmesi için kullanılırlar. Ekliptik, Rektasansiyon, Saat Açısı ve Ufuk Sistemi olarak isimlendirilen 4 farklı GKS sistemi vardır. Yörünge koordinat sistemleri ise yerküre etrafındaki uydu yörüngelerinin koordinatlarının belirlenmesi için kullanılır. 7 7
8 Giriş YKS (Yersel Koordinat Sistemleri) GKS (Göksel Koordinat Sistemleri) OKS (Yörüngesel Koordinat Sistemleri) Jeosentrik Ortalama ve Anlık Yersel Sistemler (AverageTCS -ATve InstantaneousTCS -IT) Jeodezik (elipsoidal) Sistemler (Geodetic TCS - G) Toposentrik Lokal Astronomik (LocalAstronomicCS -LA) Lokal Jeodezik (LocalGeodeticCS -LG) Ekliptik (Ecliptic E) Rektasansiyon (Right Ascension RA) Saat Açısı (HourAngle HA) Ufuk Sistemi (Horizon H) 8 8
9 1. YERSEL KOORDİNAT SİSTEMLERİ (YKS) (Terrestrial Coordinate Systems) Bu koordinat sistemleri yere göre sabit olup yerküre ile birlikte dönerler. Yersel Koordinat Sistemleri (YKS), yeryüzü üzerindeki noktaların konumlarının belirlenmesinde kullanılır. Konumlar kutupsal veya kartezyen koordinatlarla ifade edilebilirler. Yersel sistemlerin iki çeşidi vardır. Bunlar aşağıdaki şekilde sınıflandırılır. Yersel Koordinat Sistemleri (YKS) Jeosentrik (yer merkezli) Ortalama ve Anlık Yersel Sistemler Jeodezik (elipsoidal) Sistemler (ϕ, λ, h) Toposentrik (nokta merkezli) Yerel Astronomik (v, A, r) Yerel Jeodezik (a, α, r) *Kartezyen (x,y,z) ise tüm sistemler için kullanılır. 9 9

10 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Ortalama yersel sistem (AT) ideal dünya jeodezik koordinat sistemidir. Bu temel koordinat sistemi Konvansiyonel Yersel Koordinat Sistemi veya Ortalama Dünya Dik Koordinat Sistemi gibi isimlerle de anılır. Sistemin genel özellikleri şu şekilde sıralanır: a) Orijini yerin ağırlık merkezidir, b) z ekseni, yeryuvarının ortalama dönme ekseni ile çakışıktır ve pozitif yönü kısaca CIO (Conventional International Origin) olarak gösterilen Ortalama Kutup a doğru yönelmiştir. c) x ekseni, Greenwich ortalama astronomik meridyen düzlemi ile ortalama ekvator düzleminin arakesitinde uzanır ve Z eksenine diktir, pozitif yönü 0 astronomik boylamı gösterir. d) y ekseni, pozitif yönü ekvator düzlemi içerisinde 90 doğu boylamına yönelir ve sistem bir sağ el sistemi olacak şekilde seçilmiştir
11 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Z Z O Y Y O X Sağ el koordinat sistemi Sol el koordinat sistemi X 11 11
12 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Hatırlatma: Astronomik enlem (Φ); astronomik meridyen düzleminde ekvator düzlemi ile noktadan geçen çekül doğrultusu arasındaki açıdır. Jeodezik enlem (ϕ); noktanın jeodezik meridyen düzleminde elipsoit normalinin ekvator düzlemi ile yaptığı açıdır. Jeosentrik enlem (ϕ ); noktadan yerin merkezine birleştirilen doğru ile ekvator düzlemi arasında kalan açıdır
13 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Hatırlatma: Astronomik boylam (Λ) ifadesi ise; ekvator düzleminde Greenwich astronomik meridyeni ile noktanın astronomik meridyeni arasındaki açıyı ifade eder. Ayrıca, çekül eğrisi boyunca jeoit ile nokta arasındaki uzaklık ortometrik yükseklik (H) olarak tanımlanır. Böylece astronomik koordinatlar, astronomik enlem (Φ), astronomik boylam (Λ) ve ortometrik yükseklik(h) ile tanımlanır
14 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Hatırlatma: Jeodezik boylam (λ) ifadesi ise; ekvator düzleminde başlangıç meridyeni ile noktanın jeodezik meridyeni arasındaki açıyı ifade eder. Ayrıca, nokta ile noktanın elipsoit yüzeyine izdüşüm yeri arasındaki uzaklık elipsoidal yükseklik(h) olarak tanımlanır. Böylece jeodezik koordinatlar, jeodezik enlem (ϕ), jeodezik boylam (λ) ve elipsoidal yükseklik (h) ile tanımlanır
15 2/16/ JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Böylece Ortalama Yersel Sistemde (Konvansiyonel Yersel Koordinat Sistemi veya Ortalama Dünya Dik Koordinat Sisteminde) bir noktanın konumu x,y,z dik koordinatları ile tanımlanabileceği gibi astronomik enlem (Φ), astronomik boylam (Λ) ve ortometrik yükseklik (H) şeklinde eğri koordinatları ile de tanımlanabilir. S. Doğanalp Jeodezide Koordinat Sistemleri 15 15
16 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama Yersel Sistemler (AT) (Average Terrestrial Systems) Dünya sabit bir eksen etrafında dönmediği, dönme ekseni sürekli değiştiği için kutup noktaları da katı yeryuvarına göre sürekli yer değiştirir. Bu olay kutup hareketi veya kutup gezinmesi olarak adlandırılır. Sabit bir koordinat sisteminin yani Konvansiyonel Yersel Sistem in tanımlanabilmesi için değişmez bir kutup noktasına ihtiyaç vardır. Bu Ortalama Yersel Kutup (Convantional Terrestrial Pole, CTP) ve ekvator üzerinde bir sıfır boylamı (Greenwich Ortalama Gözlemevi - Greenwich Mean Observatory - GMO) yardımı ile tanımlanabilir. Kutup hareketini ve yer dönme parametrelerini belirlemek için kurulan uluslararası kuruluşlar çeşitli isimler altında faaliyet göstermişlerdir. Günümüzde bu faaliyetler 1 Ocak 1988 den beri Uluslararası Yeryuvarı Dönme Servisi (International Earth Rotation Service- IERS) tarafından kısaca ITRF olarak adlandırılan (IERS Terrestrial Reference Frame) referans ağına dayalı olarak sürdürülmektedir. Ayrıca günümüzde CTP olarak tanımlanan IERS Referans kutbunu gösterir ve 1967 yılında CIO nun (Conventional International Origin) yerini almıştır. CIO genel olarak yılları arasında yer dönüklük ekseninin ortalama yönü ile tanımlanmıştır
17 1.1. JEOSENTRİK Koordinat Sistemleri Anlık Yersel Sistemler (IT) (Instantaneous Terrestrial Systems) Yerin katı yapısına göre yerin dönme ekseninin değiştiği bilinmektedir. Her bir t anı için yerin gerçek kutbu değişmektedir. Gerçek kutup ile tanımlanan kutup arasındaki bağlantının kurulması gerekir. Yeryüzünde yapılan gözlemler (örneğin astronomik gözlemler, uydu ölçmeleri) yeryuvarının gözlem anındaki gerçek dönme eksenine göredir. Dönme ekseninin konumu katı yeryuvarına göre zamanla değiştiğinden her gözlem anında bir dönme ekseni ve bu eksene ve yerin ağırlık merkezine göre bir koordinat sistemi oluşur. Bu sistemlerin her biri Anlık Yersel Koordinat Sistemi olarak adlandırılır
18 1.1. JEOSENTRİK Koordinat Sistemleri Anlık Yersel Sistemler (IT) (Instantaneous Terrestrial Systems) Anlık Yersel Koordinat Sistemi; Başlangıcı dünyanın ağırlık merkezindedir (ortalama sistemle aynı). z ekseni dünyanın anlık dönme ekseni ile çakışıktır ve pozitif yönü anlık kutup noktasına yönelir. x ekseni dünyanın gerçek dönme eksenini ve ortalama Greenwich gözlemevini içerisine alan düzlemle anlık ekvator düzleminin arakesitinde yer alır. y ekseni sistem bir sağ el koordinat sistemi olacak şekilde anlık ekvator düzleminde yer alır. Bu sistemde bir noktanın konumu anlık x, y, z dik koordinatları ile veya anlık astronomik enlem (Φ) ve anlık astronomik boylam(λ) ve ortometrik yükseklik(h) ile belirlenir
19 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama ve Anlık Yersel Sistemler (AT-IT) (Average-Instantaneous Terrestrial Systems) Bu iki sistemin temel özelliği başlangıç noktalarının aynı olması ve dünyanın ağırlık merkezinde bulunması ve z eksenlerinin dünyanın anlık ve ortalama dönme eksenleri olmasıdır. Bir noktanın anlık yersel sistemdeki koordinatları gözlem anındaki kutup hareketi parametreleri x P, y P bilindiğine göre rotasyon matrisleri yardımıyla ortalama sisteme dönüştürülür
20 1.1. JEOSENTRİK Koordinat Sistemleri Anlık Yersel Sistemler (IT) (Instantaneous Terrestrial Systems) 90 o batı boylamı Y X Z Anlık 0 o boylamı Z CIO Ortalama Kutup 90 o batı boylamı Y X P CIO Greenwich Y Anlık O Y P T anındaki gerçek kutup Y P X X X Anlık 0 o boylamı Greenwich 20 20
21 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama ve Anlık Yersel Sistemler (AT-IT) (Average-Instantaneous Terrestrial Systems) 21 21
22 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama ve Anlık Yersel Sistemler (AT-IT) (Average-Instantaneous Terrestrial Systems) Kutup hareketi parametreleri (x P,y P ) IERS in yayınladığı Bülten-B de derece saniyesi biriminde verilmektedir. Rotasyon matrisleri; şeklinde elde edilir. Kutup noktasının koordinatları x P, y P derece saniyesi biriminde küçük değerlerdir. Bu nedenle dönüşüm diferansiyel dönüşüm olarak düşünülebilir
23 JEOSENTRİK Koordinat Sistemleri Ortalama ve Anlık Yersel Sistemler (AT-IT) (Average-Instantaneous Terrestrial Systems) Bu durumda dönüşüm işlemi; matrislerinin çarpımı şeklinde yazılırsa eşitlik sadeleştirilir ve böylece aşağıdakisonuçeşitliğieldeedilir.hesaplamalardax P,y P radyanbirimindealınmalıdır. = = ) ( ) ( 1 2 P P P P P P P P P P y x y x y y x x y R x R 23
24 1.1. JEOSENTRİK Koordinat Sistemleri Ortalama ve Anlık Yersel Sistemler (AT-IT) (Average-Instantaneous Terrestrial Systems) Benzer şekilde tersi dönüşüm de yapılabilir. Yani Ortalama Yersel sistemden (AT) Anlık sisteme (IT) dönüşüm işlemi için; 24 24
25 1.1. JEOSENTRİK Koordinat Sistemleri Jeodezik (elipsoidal) Sistemler (G) (Geodetic Terrestrial Systems) Jeodezik (elipsoidal) Sistemin başlangıcı elipsoidin merkezindedir, z ekseni elipsoidin küçük ekseni ile çakışıktır, x ekseni Greenwich jeodezik meridyen düzlemi ile ekvator düzleminin arakesitindedir, y ekseni bir sağ el sistemi oluşturacak şekilde seçilmiştir. Bu sistemde bir P yer noktasının konumu x, y, z dik koordinatları ile veya ϕ, λ, h elipsoidal eğri koordinatları ile belirlenir. ϕ elipsoidal (jeodezik) enlem, λ elipsoidal boylam ve h elipsoidal yükseklik olarak adlandırılır
26 1.1. JEOSENTRİK Koordinat Sistemleri Jeodezik (elipsoidal) Sistemler (G) (Geodetic Terrestrial Systems) Elipsoidal eğri koordinatlardan elipsoidal dik koordinatlara geçiş şu şekilde gerçekleştirilir. Eşitliklerde N meridyene dik doğrultudaki normal kesit eğrilik yarıçapı, a ve b sırasıyla elipsoidin büyük ve küçük yarı eksen uzunluklarıdır. x y = = (N (N + + h) h) cos cos φ cos φ sin b 2 z = N + h sin φ = (1 e 2 )N + h sin φ 2 a a 2 c = b 2 e a 2 b 2 = a 2 λ λ a b e = b 2 N = c V = c 1 + e 2 cos 2 φ N = a W = a 1 e 2 sin 2 φ 26 26
27 1.1. JEOSENTRİK Koordinat Sistemleri Jeodezik (elipsoidal) Sistemler (G) (Geodetic Terrestrial Systems) Tam tersi dönüşüm işlemi ise yani elipsoidal dik koordinatlardan elipsoidal eğri koordinatlarına dönüşüm işlemi önceki slayt sayfa aralığında verilen Jeodezik Dik Koord. >>> Jeodezik Eğri Koord.Dönüşüm (X,Y,Z >>> φ, λ, h) işlemine benzer şekilde yapılabilmektedir. ve 27 27
28 1.2. TOPOSENTRİK Koordinat Sistemleri Yersel Koordinat Sistemlerinin ikinci bölümünü Toposentrik Sistemler oluşturur. Yeryüzü üzerindeki her nokta için ayrı bir toposentrik sistem tanımlanır. Bunların en belirgin özelliği başlangıç noktasının durulan noktada olmasıdır. Daha öncede söz edildiği gibi iki çeşit toposentrik sistem tanımlanabilir: Yerel astronomik sistem(la) Yerel jeodezik sistem(lg) 28 28
29 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Astronomik Sistem (LA) (Local Astronomic System) Yeryüzünde yapılan bütün ölçmeler bu sisteme göre yapılır. Örneğin bir P noktasına kurulan teodolit bu noktadan geçen jeopotansiyel yüzeye göre tesviye edilir ve aletin asal ekseni çekül doğrultusu ile yani z ekseni ile çakıştırılır. x ekseninin doğrultusu astronomik gözlemlerle belirlenir. Bir yerel astronomik sistem şu şekilde tanımlanabilir: sistemin başlangıcı fiziksel yeryüzü üzerinde durulan nokta olup aslında gözlem istasyonuna karşılık gelmektedir. z ekseni (Up-u) durulan noktadan (gözlem istasyonu) geçen eş potansiyelli yüzeyin normali (çekül eğrisinin teğeti, çekül doğrultusu) ile çakışır ve pozitif yönü astronomik başucuna yönelmiştir. x ekseni (North-n) durulan noktadaki jeopotansiyel yüzeye teğet düzlem içerisindedir ve ortalama kutup noktası CIO ya yönelmiştir. x ekseninin yönü astronomik kuzey olarak adlandırılır. y ekseni (East-e) bir sol el sistemi oluşturacak şekilde teğet düzlem içerisinde doğuya yönelmiştir
30 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Astronomik Sistem (LA) (Local Astronomic System) v A Z sveyar kl Düşey açıyı Astronomik azimutu S noktasının zenituzaklığını S noktası ile istasyonnoktası arasındaki toposentrik uzaklığı gösterir. Şekilden; bir k noktasından l noktasına A astronomik azimutu, v düşey açısı ve s veya r kl kenarı ölçülebilir. Bunlar k noktasının kutupsal koordinatlarıdır. Bu kutupsal koordinatlar ile x, y, z lokal astronomik dik koordinatlar arasında şu ilişki kurulabilir: = r kl sin sin Z Z kl kl cos cos sin A Z kl A kl kl 30 30
31 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Astronomik Sistem (LA) (Local Astronomic System) Yerel Astronomik koordinat sistemiyle Ortalama Yersel sistem arasındaki dönüşüm işlemi astronomik boylam, astronomik enlem değerleriyle yapılabilir: EşitliktengörüleceğigibiR 2,R 3 dönüşüm matrislerininhesaplanması gereklidir. Ayrıca P 2 matrisinin bilinmesi gerekir. P 2 matrisi, yansıma matrisi olarak adlandırılır. Bu matrisin kullanım amacı; AT sistemi sağ-el sistemine dayalı iken LA sistemi sol-el sistemine dayalıdır. Bu yansıma matrisi kullanılarak LA sistemi önce sağ-el sistemine dönüştürülür ve sonra dönüşüm matrisleri yardımıyla AT sistemine dönüştürülür
32 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Astronomik Sistem (LA) (Local Astronomic System) Dönüşüm matrisleri şu şekilde hesaplanabilir: Tersi dönüşüm işleminin de yapılması olanaklıdır. Bunun için dönüşüm formülü aşağıdaki biçimde uygulanır: 32 32
33 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Jeodezik Sistem (LG) (Local Geodetic System) Bir yerel jeodezik sistemde başlangıç gözleme istasyonundan geçen elipsoid normali üstündedir. Prensip olarak başlangıç noktasının elipsoid normali boyunca herhangi bir yerde olabileceğine dikkat etmek gerekir. Uygulamada; başlangıç noktası gözleme istasyonunda (örneğin GPS alıcı anteninin üzerine kurulduğu nokta), elipsoid yüzünde veya elipsoid normali ile jeoidin kesiştiği yerde seçilir. z (Up-u) ekseni elipsoid normali ile çakışır ve pozitif yönü jeodezik başucuna yönelmiştir. x (North-n) ekseni başlangıç noktasında elipsoid normaline dik olan (teğet) düzlem içerisindedir ve elipsoidin dönme eksenine yani jeodezik kuzeye (CIO,CTP) yönelmiştir. y (East-e) ekseni bir sol el sistemi oluşturacak şekilde jeodezik doğuya yönelmiştir
34 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Jeodezik Sistem (LG) (Local Geodetic System) Bu kutupsal koordinatlar ile x, y, z yerel jeodezik dik koordinatlar arasında şu ilişki kurulabilir: a Snotasının yükseklik açısını α Jeodezik azimutu z S noktasının zenituzaklığını (z +a=90 0 ) sveyar kl S noktası ile istasyonnoktası arasındaki toposentrik uzaklığı gösterir. α z a = r kl sin sin z' z' kl kl cos cos sin z' kl α α kl kl 34 34
35 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Jeodezik Sistem (LG) (Local Geodetic System) Yerel jeodezik sistemin yönlendirilmesi jeodezik enlem ve boylama göre yapılmaktadır. Buna göre, Yerel Jeodezik(LG) koordinatlardan Jeodezik(G) koordinatlara dönüşüm şu şekilde ele alınabilir: Buradaki dönüşüm matrisleri, LA sistemine benzer şekilde oluşturulur. Tam tersi dönüşüm işlemini de yapmak yani jeodezik koordinatlardan yerel jeodezik koordinatlara dönüşüm işlemi aşağıdaki eşitlik kullanılır: 35 35
36 1.2. TOPOSENTRİK Koordinat Sistemleri Yerel Jeodezik Sistem (LG) (Local Geodetic System) LG sistemi, GPS anten yüksekliklerinin jeodezik ölçü noktasına indirgenmesinde, baz vektörlerinin yatay ve düşey bileşenler şeklinde ifade edilmesinde ve eğer varsa ölçü noktasındaki merkez dışı (eksantirisite) değerlerinin hesaplanmasında kullanılmaktadır. Yerel Astronomik Koordinat Sistemi (LA) ile Yerel Jeodezik Koordinat Sistemi (LG) karşılaştırılırsa; tanımlamaları aynı olup aradaki en önemli fark LA sisteminin u-ekseni elipsoit normali yerine noktadan geçen çekül eğrisi (doğrultusu) ile tanımlanmaktadır. Diğer iki eksen olan n ve e eksenleri LG sistemindeki eksenlerle aynı şekilde tanımlanırlar. Diğer yandan, hesaplamalarda kullanılan eşitliklere bakıldığında; LG sisteminde jeodezik koordinatlar (jeodezik enlem (ϕ), jeodezik boylam (λ)) yerine LA sisteminde noktanın astronomik koordinatları (astronomik enlem (φ) ve astronomik boylam (Λ)) ifadeleri kullanılır
37 1.2. TOPOSENTRİK Koordinat Sistemleri Lokal Jeodezik Sistem (LG) (Local Geodetic System) 37 37
38 38 38
39 ULUSLARARASI YERSEL REFERANS SİSTEMİ Jeodezinin en önemli görevlerinden birisi de yeryüzü noktalarının 3 boyutlu koordinatlarının belirlenmesidir. Söz konusu koordinatlar belirli bir koordinat sistemine göre belirlenmektedir. Ölçme sistemleri geliştikçe ve elde edilen doğruluklar arttıkça koordinat sistemlerinin tanımlamalarında da önemli değişiklikler meydana gelmektedir. Genel olarak günümüzde, iki farklı koordinat sistemi kullanılmaktadır. Bunlar uzay sabit (inertial, space-fixed) ve yer sabit(earth-fixed) sistemlerdir. Uluslararası Yer Dönüklük ve Referans Sistemleri Servisi IERS bu sistemlerin tanım ve gerçekleşmesini uluslararası bir standart olarak kullanıcılara duyurur. IERS analiz merkezleri VLBI, SLR, LLR, GPS, DORIS gibi uzay jeodezik tekniklerden gelen verileri birleştirerek sonuçları, yer dönme parametreleri, Uluslararası Göksel Referans Sistemi (ICRF- International Celestical Reference Frame), Uluslararası Yersel Referans Sistemi (ITRF-International Terrestrial Reference Frame) olarak yayımlar
40 ULUSLARARASI YERSEL REFERANS SİSTEMİ Uzay sabit koordinat sistemi inersiyal bir koordinat sistemi olup uydu hareketlerinin tanımlanması için kullanılır. Yer sabit sistem ise uydu jeodezisinden elde edilen sonuçların tanımlanması ve gözlem istasyonlarının konumları için gereklidir. İnersiyal referans sistemi için hareketsiz bir koordinat sistemi veya herhangi bir ivmelenmeden dolayı hareketini aynı tarzda, değişmeden sürdüren bir sistem tanımı yapılabilir. Yer Merkezli İnersiyal (ECI; Earth-Centered Inertial) Koordinat Sistemi yıldızlara göre sabit inersiyal bir koordinat sistemi olup uydu yörüngelerinin ve dolayısıyla uydu koordinatlarının hesaplanmasında kullanılmaktadır. Bu sistemlerin yıldızlara göre sabit olmasının anlamı, yeryüzü ile birlikte dönmemesi (non-rotating) demektir. Diğer taraftan üzerinde ölçü yapılan nokta koordinatları yeryüzü ile birlikte dönen bir koordinat sisteminde tanımlanmalıdır. Bu koordinat sistemine Yer Merkezli Yer Sabit (ECEF ; Earth-Centered Earth-Fixed) Koordinat Sistemi denmektedir
41 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI koordinat sisteminde, X ve Y eksenleri yer ile birlikte dönmekte, böylece uzayda sabit doğrultular tanımlamamaktadırlar. Diğer taraftan, yeryüzündeki sabit bir noktanın ECEF sistemindeki koordinatları sürekli sabit olacaktır. ECEF koordinat sisteminin temel amacı, zamana bağlı koordinat elde eden kullanıcının ulaşabileceği uygun bir referans sistemi oluşturmaktır
42 ULUSLARARASI YERSEL REFERANS SİSTEMİ Yer Merkezli İnersiyal Koordinat Sistemi (ECI; Earth-Centered Inertial Coordinate System) Kartezyen koordinatlarla tanımlı bu sistemin başlangıç noktası yeryuvarının kitle ağırlık merkezidir. Sistemin +Z ekseni yerin dönüş ekseni doğrultusunda kuzey yönünü, +X ekseni ekliptik ile ekvatorun arakesit doğrultusunda ilkbahar noktası yönünü, +Y ekseni sağ el koordinat sistemini oluşturacak ekseni tanımlar. ECI 42 42
43 ULUSLARARASI YERSEL REFERANS SİSTEMİ Yer Merkezli İnersiyal Koordinat Sistemi (ECI; Earth-Centered Inertial Coordinate System) Sistem yerin güneş etrafındaki düzensiz hareketi, presesyon ve nutasyondan dolayı tam anlamıyla inersiyal değildir. Bu sorunun çözümü için koordinat sisteminin eksenlerini belirli bir epoğa göre tanımlamak gereklidir. Bu epok 01 Ocak 2000 tarihli 12:00 UTC zamanındaki J olarak adlandırılan epoktur. Bu şekilde tanımlanan koordinat sistemine Ortalama Gök Referans Sistemi (MCRS-Mean Celestial Reference System) veya Geleneksel Gök Referans Sistemi (CCRS-Conventional Celestial Reference System) adı verilir. Eğer koordinat eksenleri; J epoğu yerine herhangi bir t anı için (örneğin gözlem anı) tanımlanırsa bu durumda elde edilen anlık koordinat sistemine Gerçek Gök Referans Sistemi (TCRS- True Celestial Reference System) adı verilir. ECI 43 43

44 Hatırlatma: Yeryuvarının yörünge elipsinin içinde bulunduğu düzleme yörünge düzlemi, Eğer yer küresi sonsuza genişletilirse oluşan küre gök küresi (celestial sphere) adını alır. Yörünge düzleminin gök küresi ile arakesitine ise ekliptik dairesi adı verilir. Gök küresinin merkezinden geçen ve yeryuvarının dönme eksenine merkezde dik düzlemin gök küresi ile arakesitine gök ekvatoru(celestial equator) denir. Ekvator ve ekliptik daireleri iki noktada kesişirler: ilkbahar noktası (ϒ) ve sonbahar noktası(ω) dır. Dünyanın dönme ekseni gök küresini kuzey ve güney gök kutuplarında keser (NCP: North Celestial Pole, SCP: South Celestial Pole). İlkbahar ekinoksu (vernal equinox) güneşin ilkbaharda güneyden kuzeye geçişindeki kesişme noktasıdır. Gök ekvatoru ile ekliptik arasındaki dar açı ekliptik eğikliği olarak adlandırılır. Yaklaşık değerindedir
45 ULUSLARARASI YERSEL REFERANS SİSTEMİ Yer Merkezli Yer Sabit Koordinat Sistemi (ECEF;Earth-Centered Earth-Fixed Coordinate System) ECI koordinat sistemi daha öncede söz edildiği gibi uydu yörüngelerinin, koordinatlarının hesaplanmasında kullanılan yıldızlara göre sabit inersiyal bir sistemdir. Bu ifade, koordinat sisteminin yeryüzü ile birlikte dönmemesi anlamı taşır. Bundan dolayı, ölçü yapılan nokta koordinatlarının tanımlanabilmesi için yeryüzü ile birlikte hareket eden bir koordinat sistemine ihtiyaç duyulur. Bu koordinat sistemine Yer Merkezli Yer Sabit (ECEF; Earth Centered Earth Fixed) veya CTRS (Conventional Terrestrial Reference System) adı verilir. ECEF 45 45
46 ULUSLARARASI YERSEL REFERANS SİSTEMİ Yer Merkezli Yer Sabit Koordinat Sistemi (ECEF;Earth-Centered Earth-Fixed Coordinate System) ECEF koordinat sisteminin temel amacı, yeryüzünde ölçü yapan ve bunun sonucunda zamana bağlı koordinat elde eden kullanıcının ulaşabileceği uygun bir referans sistemi oluşturmaktır. CTRS ifadesi ise gerçekte soyut bir kavram olup bunun gerçekleşmesi CTRF (Conventional Terrestrial Reference Frame) olarak karşımıza çıkar. CTRF, yeryüzünde tesis edilmiş ve sabit (referans) fiziksel nokta olarak bilinen çok sayıda yer kontrol noktasında yapılan ölçüler sonucunda belirlenmiş jeosentrik koordinatlar ile tanımlanmıştır. Uluslararası Yer Dönüklük ve Referans Sistemleri Servisi IERS bu sistemlerin tanım ve gerçekleşmesini uluslararası bir standart olarak kullanıcılara duyurur. IERS analiz merkezleri VLBI, SLR, LLR, GPS, DORIS gibi uzay jeodezik tekniklerden gelen verileri birleştirerek sonuçları, yer dönme parametreleri, Uluslararası Göksel Referans Sistemi (ICRF- International Celestical Reference Frame), Uluslararası Yersel Referans Sistemi (ITRF-International Terrestrial Reference Frame) olarak yayımlar
47 ULUSLARARASI YERSEL REFERANS SİSTEMİ Yer Merkezli Yer Sabit Koordinat Sistemi (ECEF;Earth-Centered Earth-Fixed Coordinate System) ECI koordinat sistemindeki gibi, ECEF de kartezyen koordinatlarla tanımlı olup sistemin başlangıç noktası yerin kitle merkezindedir. +Z ekseni coğrafi kuzey kutbunu gösterir ve 1900 ile 1905 yılları arasındaki yer dönme ekseninin ortalama konumu (CIO) ile çakışıktır. +X ekseni ortalama Greenwich meridyeni ve ortalama ekvatorun arakesiti ile çakışık olup sıfır derece boylamı doğrultusunda konum alır. +Y ekseni ise sağ el koordinat sistemini oluşturur. ECEF sisteminin gerçekleşmesi yeryüzüne global anlamda dağılmış nokta dizilerine bağlıdır. Bu gerçekleşmeler sonucunda oluşan koordinat sistemlerinden birisi de WGS84 sistemidir. ECEF 47 47
48 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ ECI ve ECEF arasında kaba bir dönüşüm için temel olarak Greenwich ortalama yıldız zamanı-gmst (Greenwih Mean Sideral Time) veya Greenwich görünen yıldız zamanı-gast (Greenwich Apparent Sidereal Time) ve kutup hareket bileşenleri (x p,y p )gereklidir. Kesin dönüşüm içinse bu parametrelerin yanında, yerin dönme eksenini belirli periyotlarla devinime zorlayan presesyon ve nutasyon etkilerinin göz önüne alınmasıyla sağlanır
49 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ Bu açıklamalar doğrultusunda, ICRF(veya ECI) sisteminde verilen bir konum vektörünün ITRF(veya ECEF) sistemindeki karşılığını bütün etkilerin içinde yer aldığı T(t) dönüşüm matrisi yardımıyla tanımlamak mümkün olur. Dönüşüm matrisi 3x3 boyutlu zaman değişkenli ortogonal bir matris özelliğindedir. Sistemler arasındaki dönüşüm ve zamana bağlı olarak koordinat eksenlerinin uzaydaki konumunu tanımlayan dönüşüm matrisi, W(t) : kutup hareketi, R(t) : yer dönüklük, N(t) :nutasyonve P(t) : presesyon etkilerini düzenleyen alt matrisler oluşturur. Dönüşümde kullanılan matrisleri kısaca açıklamak ve matematiksel eşitlikleri vermek yerinde olacaktır
50 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi Presesyon, yeryuvarının dönme ekseninin ekliptik eksen etrafındaki devinim hareketi olup peryodu yıldır. Presesyon, ilkbahar noktasını (ekinoks) ekliptik yörüngesi boyunca yılda 50.3 lik hızla devinime zorlar, buna ekinoks presesyonu veya kısaca presesyon denir. Presesyon hareketini doğuran etkenleri: yeryuvarının dönme ekseninin yörünge düzlemine dik olmaması, yeryuvarının kutuplardan basıklığı olarak sıralayabiliriz
51 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi IAU76 presesyon modeline göre presesyon elemanları aşağıdaki şekilde üç açı ile tanımlanır: Buradaki zaman değişimi(yüzyıllık), eşitliğinden hesaplanır. Eşitlikte geçen J (1 Ocak 2000, 12 h ) başlangıç anından itibaren geçen Jülyen günüdür ve değerine karşılık gelir. Yukarıdaki dönüklük elemanlarının her biri bağımsız bir koordinat dönüşümünü işaret eder. Sırasıyla, x,y ve z eksenlerine uygulanacak dönüklük sonucunda 51 51
52 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi Julian Günü (Juliandate-JD) Hesabı : yıl için Y, ay için M, gün için Dve saat için UT kısaltmaları kullanılırsa; y = Y-1 ve m = M+12 eğer M 2 y = Y ve m = M eğer M > 2 JD=INT [365.25*y] + INT [ * (m+1)] + D + UT/ formülasyonu ile hesaplanabilir
53 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi Eğer Jülyen gününden tarih hesaplanmak istenirse aşağıdaki adımlar kullanılabilir : a = INT [JD + 0.5] b = a Sivil Tarih Jülyen Tarihi c = INT [(b-122.1)/365.25] d = INT [365.25* c ] 6 Ocak :00 UT GPS Standart Epoğu e = INT [(b d)/ ] D = b d INT[ *e] M = e 1 12*INT [e/14] Y = c 4715 INT[(7 + M)/10 ] Saat = JD+0.5-INT(JD+0.5) Haftanın gününü hesaplamak için mod7 ye göre aşağıdaki formül kullanılabilir : N = modulo(int[jd ], 7 ) GPS haftası ise aşağıdaki bağıntı ile elde edilebilir : HAFTA = INT [(JD )/7] Modified Julian Date MJD = JD Ocak :00 UT Günümüzde kullanılan standart epok (J ) 53 53

54 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi Örnek: Günümüzde kullanılan standart epok 1 Ocak :00 UTC tarihinin Jülyen gününü hesap edelim: 54 54
 DÖNÜŞÜMÜ PRESESYON")

55 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi Örnek: Jülyen gününe ait takvim zamanını hesaplayınız
56 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ PRESESYON P(t) matrisi toplam presesyon etkisini ifade eden matris ortaya çıkar. Presesyon matrisi ICRF sisteminin J2000 anındaki ortalama eksen doğrultularını t gözlem epoğuna taşır
57 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ NUTASYON N(t) matrisi Gök kutbunun ekliptik kutup etrafındaki hareketi ekliptik düzlemine paralel ve güneşin çekim doğrultusuna dik yönde gerçekleşir. Güneş yıl içerisinde değişik konumlar aldığından hareketin yönü de zamanla değişir ve periyodik bir görünüm sergiler. Bu periyodik harekete nutasyon adı verilir. Ortalama gün (mean-of-date) sisteminden gerçek gün (true-of-date) sistemine dönüşüm nutasyona bağlıdır. Burada dört açı kullanılır. Bunlar ekliptiğin ortalama eğiklik açısı ϵ m, ekliptiğin gerçek eğiklik açısı ε t, boylamdaki nutasyon açısı ΔѰ ve ekliptik eğiklikteki nutasyon açısı Δε'dır. Bu açılar yardımıyla nutasyon matrisi; ile gösterilir
58 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ NUTASYON N(t) matrisi Ekliptik eğiminin ortalama ve gerçek değerleri eşitliklerinden türetilir
59 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ YER DÖNÜKLÜK - R(t) matrisi Yerin günlük dönmesi, GMST (Greenwich Mean Sideral Time) olarak bilinen Greenwich ortalama yıldız zamanıaçısına(α G )bağlıdır.buradan R(t)matrisisadecezeksenietrafındaki dönüklüketkisiyle tanımlanır. Bazı durumlarda özellikle ECEF sisteminin dönüklüğüne göre uydu hız vektörü gerekli olduğunda, dönüşüm matrisinin her bir elemanının zamana göre türevi gerekli olacaktır. Bununla beraber R(t) matrisinin zamana göre türevi sonuçlar üzerinde çok etkili olduğundan uygulamada önem teşkil etmektedir. R(t) matrisinin zamana (α G ) göre türevi alındığında alındığında aşağıdaki eşitlik elde edilir
60 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ YER DÖNÜKLÜK - R(t) matrisi Burada yerin dönüklük değişimi başka bir deyişle açısal hızıdır. Yüksek duyarlık gerektiren uygulamalar için bu hız değeri hesaba dahil edilmelidir. IERS ye göre ortalama hız rad/s'dir. Öte yandan GMST değeri(radyan biriminde) eşitliğinden bulunur. Burada ΔT=UT1-J2000.0; J2000.0'dan itibaren jülyen günüdür. Yer dönüklük matrisini oluşturmak için bu denkleme ekinoks denklemi olarak bilinen ek düzeltme uygulanmalıdır. Yüksek doğruluk için birkaç milisaniyelik inceliğe kadar inilmelidir. Sonuç olarak ekinoks denkleminin eklenmesiyle eşitliği elde edilir
61 ULUSLARARASI YERSEL REFERANS SİSTEMİ ECI-ECEF (ICRF-ITRF) DÖNÜŞÜMÜ KUTUP HAREKET - W(t) matrisi Yerin dönme ekseni sabit değildir ve iki açı x P,y P ECEF sistemine göre dönme ekseninin konumunu tanımlamak için kullanılır. Kutup hareketi bileşenlerinin küçük açılar olması sayesinde dönüşüm matrisi aşağıdaki matris ile ifade edilebilir. x P,y P radyan biriminde verilir. Yandaki şekilde tarihinden tarihine kadar kutup hareket matrisini oluşturan kutup gezinmesi bileşenlerinin değişimi görülmektedir
62 62 62
63 Kaynaklar Kaynaklar: Bu kaynak Necmettin Erbakan Üniversitesi ve Selçuk Üniversitesi Harita Mühendisliği Bölümünde okutulan Jeodezide Koordinat Sistemleri dersine ait yardımcı DERS NOTU olarak hazırlanmıştır. Bu ders notunda anlatılan bilgiler çeşitli kitap, internet bilgileri(kaynakları) ve makaleler derlenerek elde edilmiştir. Hiçbir ticari kaygı taşımamaktadır. İçeriğinde olabilecek/var olan hataları ve her türlü eleştirinin bildirilmesi için lütfen adresine geri dönüş yapınız. Kaynaklarından yararlandığım tüm bilim insanlarına teşekkür ederim!!! Serkan Doğanalp 63 63
64 Kaynaklar Kaynaklar: Krakiwsky, E.J., Wells, D.E., Coordinate Systems in Geodesy, Lecture Notes:16, Department of Geodesy and Geomatics Engineering, University of New Brunswick. Jekeli, C., Geometric Reference Systems in Geodesy, Division of Geodesy and Geospatial Science, School of Earth Sciences, Ohio State University. Dilaver, A., Jeodezide Temel Koordinat Sistemleri, KTÜ Mühendislik Mimarlık Fakültesi, Trabzon. Bildirici, İ.Ö., Datum, Projeksiyon, Koordinat Sistemleri, Konya-Karaman İllerindeki Harita Mühendislerinin Uydu Teknikleri Alanındaki Mesleki Eğitim ve Uygulamaları Eğitim Projesi, Konya. BÖHHY, Büyük Ölçekli Harita ve Harita Bilgileri Üretim Yönetmeliği. BÜ KRDAE, Jeodezi Anabilim Dalı. Jeodezi, Datum, Koordinat Sistemleri, Harita Projeksiyonları,
65 Kaynaklar Kaynaklar: internet kaynağı. Jeodezik Koordinatlar ve Datum,(datum.pdf ve datum.ppt). Doğanalp, S., Gravite Alanı Belirleme Amaçlı Yakın Yer Uyduları İçin Duyarlı Yörünge Belirleme Teknikleri, Selçuk Üniversitesi, FBE, Doktora tezi, Konya. Ulsoy, E., Jeodezide Kullanılan Koordinatlar, Bunların Birbirlerine Dönüşümleri ve Projeksiyon, HKM Jeodezi, Jeoinformasyon Ve Arazi Yönetimi Dergisi sayı: 26. Dennis D. McCarthy (ed.): IERS Conventions (1996). (IERS Technical Note ; 21) Paris: Central Bureau ofiers-observatoiredeparis,1996.[ii],ii,97p. IERS Conventions (2003). Dennis D. McCarthy and Gérard Petit. (IERS Technical Note ; 32) Frankfurt am Main: Verlag des Bundesamts für Kartographie und Geodäsie, pp., paperback, ISBN (print version)
66 Kaynaklar Kaynaklar: Z. Altamimi, X. Collilieux, and L. Métivier: Analysis and results of ITRF2008. (IERS Technical Note ; 37) Frankfurt am Main: Verlag des Bundesamts für Kartographie und Geodäsie, pp., ISBN (print version), in print Stanaway, R., GDA94, ITRF & WGS84 What s the difference?, Working with Dynamic Datums, Spatial Sciences Institute Biennial International Conference SSC2007, May 2007, Hobart, Tasmania, Australia. Şanlıoğlu, İ., İnal, C., ITRF2000 nin Tanıtımı ve ITRF2000 ile Diğer Referans Ağları Arasındaki Dönüşüme Alternatif Bir Yaklaşım, Deprem Sempzyumu, Kocaeli, pp Dawson, J., Steed, J., International Terrestrial Reference Frame (ITRF) to GDA94 Coordinate Transformations, Australian Goverment, Geoscience Australia
67 Kaynaklar Kaynaklar: Demirkol, E.Ö., Gürdal, M.A., Yıldırım, A. Avrupa Datumu 1950 (European Datum 1950: ED-50) ile Dünya Jeodezik Sistemi 1984 (World Geodetıc System 1984: WGS84) Arasında Datum (koordinat) Dönüşümü ve Askeri Uygulamaları, Kahar, J., Lecture Note on Geodesy, Research Center for Seismology, Volcanology, and Disaster Mitigation at Graduate School of Environmental Studies, Nagoya University. Kahveci, M., Yıldız, F., GPS/GNSS Uydularla Konum Belirleme Sistemleri, Teori ve Uygulama, 5. Basım, Nobel Akademik Yayıncılık Eğitim Danışmanlık Tic. Ltd. Şti., 225 sayfa. Eriksson, H., Geodetic reference systems and Map projections, Lund University. Calais, E., Terrestrial Reference System and Frame, Datum Transformations, Purdue University EAS Department, Civil
68 Kaynaklar Kaynaklar: Ay, İ., Teknolojinin Bilimsel İlkeleri(Ders Notları). Yıldız, H., Yükseklik Modernizasyonu Yaklaşımı: Türkiye İçin Bir İnceleme, Harita Dergisi, sayı:147,pp Demir, C., Cingöz, A., Türkiye Ulusal Düşey Kontrol Ağı (TUDKA-99), Üstün, A., Jeodezik Astronomi Ders Notları, S.Ü. Müh. Fak. Har. Müh. Bölümü. Üstün, A., Uydu Jeodezisi Ders Notları, S.Ü. Müh. Fak. Har. Müh. Bölümü. Arslan, E., Ülke Ölçmeleri ve Jeodezi Ders Notları,
JEODEZİK ÖLÇMELER DERSİ. Yrd. Doç. Dr. Hakan AKÇIN Yrd. Doç. Dr. Hüseyin KEMALDERE
 JEODEZİK ÖLÇMELER DERSİ Yrd. Doç. Dr. Hakan AKÇIN Yrd. Doç. Dr. Hüseyin KEMALDERE REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM 1. Hafta Ders Notları REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM Referans (Koordinat)
JEODEZİK ÖLÇMELER DERSİ Yrd. Doç. Dr. Hakan AKÇIN Yrd. Doç. Dr. Hüseyin KEMALDERE REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM 1. Hafta Ders Notları REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM Referans (Koordinat)
Harita Projeksiyonları
 Harita Projeksiyonları Bölüm Prof.Dr. İ. Öztuğ BİLDİRİCİ Amaç ve Kapsam Harita projeksiyonlarının amacı, yeryüzü için tanımlanmış bir referans yüzeyi üzerinde belli bir koordinat sistemine göre tanımlı
Harita Projeksiyonları Bölüm Prof.Dr. İ. Öztuğ BİLDİRİCİ Amaç ve Kapsam Harita projeksiyonlarının amacı, yeryüzü için tanımlanmış bir referans yüzeyi üzerinde belli bir koordinat sistemine göre tanımlı
Jeodezi
 1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
Dünyanın dönmesi: Yer sabit -> gök sistemleri arasındaki dönüşüm r gök = Qr yer-sabit Neden dünyanın dönmesi ile ilgileniyoruz?
 Dünyanın Dönmesi Dünyanın dönmesi: Yer sabit -> gök sistemleri arasındaki dönüşüm r gök = Qr yer-sabit Neden dünyanın dönmesi ile ilgileniyoruz? yer sistemi ve gök sistemini ilişkilendirmek istiyoruz quasarlar
Dünyanın Dönmesi Dünyanın dönmesi: Yer sabit -> gök sistemleri arasındaki dönüşüm r gök = Qr yer-sabit Neden dünyanın dönmesi ile ilgileniyoruz? yer sistemi ve gök sistemini ilişkilendirmek istiyoruz quasarlar
EKVATORAL KOORDİNAT SİSTEMİ
 EKVATORAL KOORDİNAT SİSTEMİ Dünya nın yüzeyi üzerindeki bir noktayı belirlemek için enlem ve boylam sistemini kullanıyoruz. Gök küresi üzerinde de Dünya nın kutuplarına ve ekvatoruna dayandırılan ekvatoral
EKVATORAL KOORDİNAT SİSTEMİ Dünya nın yüzeyi üzerindeki bir noktayı belirlemek için enlem ve boylam sistemini kullanıyoruz. Gök küresi üzerinde de Dünya nın kutuplarına ve ekvatoruna dayandırılan ekvatoral
GÜNEY YARIM KÜRESİ İÇİN ŞEKİL
 GÜNEY YARIM KÜRESİ İÇİN ŞEKİL Bu şekilde, gözlemcinin zeniti bundan önceki şekillerdeki gibi yerleştirilir. Bu halde gök ufku şekildeki gibi olur. Güney yarım kürede Q güney kutbu ufkun üzerindedir. O
GÜNEY YARIM KÜRESİ İÇİN ŞEKİL Bu şekilde, gözlemcinin zeniti bundan önceki şekillerdeki gibi yerleştirilir. Bu halde gök ufku şekildeki gibi olur. Güney yarım kürede Q güney kutbu ufkun üzerindedir. O
ARAZİ ÖLÇMELERİ. Koordinat sistemleri. Kartezyen koordinat sistemi
 Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
TOPOĞRAFYA Temel Ödevler / Poligonasyon
 TOPOĞRAFYA Temel Ödevler / Poligonasyon Yrd. Doç. Dr. Aycan M. MARANGOZ ÇEVRE MÜHENDİSLİĞİ BÖLÜMÜ JDF 264/270 TOPOĞRAFYA DERSİ NOTLARI http://geomatik.beun.edu.tr/marangoz http://jeodezi.karaelmas.edu.tr/linkler/akademik/marangoz/marangoz.htm
TOPOĞRAFYA Temel Ödevler / Poligonasyon Yrd. Doç. Dr. Aycan M. MARANGOZ ÇEVRE MÜHENDİSLİĞİ BÖLÜMÜ JDF 264/270 TOPOĞRAFYA DERSİ NOTLARI http://geomatik.beun.edu.tr/marangoz http://jeodezi.karaelmas.edu.tr/linkler/akademik/marangoz/marangoz.htm
Harita Projeksiyonları ve Koordinat Sistemleri. Doç. Dr. Senem KOZAMAN
 Harita Projeksiyonları ve Koordinat Sistemleri Doç. Dr. Senem KOZAMAN Yeryüzü şekilleri ve ayrıntılarının düz bir yüzey üzerinde, belli bir ölçek ve semboller kullanarak, bir referans sisteme göre ifade
Harita Projeksiyonları ve Koordinat Sistemleri Doç. Dr. Senem KOZAMAN Yeryüzü şekilleri ve ayrıntılarının düz bir yüzey üzerinde, belli bir ölçek ve semboller kullanarak, bir referans sisteme göre ifade
ARAZİ ÖLÇMELERİ. Koordinat sistemleri. Kartezyen koordinat sistemi
 Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Astronomik Zaman Sistemleri
 Astronomik Zaman Sistemleri Astronomik Zaman Sistemleri İki türlüdür Dünyanın kendi etrafında dönüşüne bağlı olarak tanımlanan zamanlar Atom saatleri ile (yani atomik salınımlarınfrekansı) ile yürütülen
Astronomik Zaman Sistemleri Astronomik Zaman Sistemleri İki türlüdür Dünyanın kendi etrafında dönüşüne bağlı olarak tanımlanan zamanlar Atom saatleri ile (yani atomik salınımlarınfrekansı) ile yürütülen
Elipsoid Yüzünde Jeodezik Dik Koordinatlar (Soldner Koordinatları) ve Temel Ödev Hesapları
 ve Temel Ödev Hesapları") JEODEZİ8 1 Elipsoid Yüzünde Jeodezik Dik Koordinatlar (Soldner Koordinatları) ve Temel Ödev Hesapları Jeodezik dik koordinatları tanımlamak için önce bir meridyen x ekseni olarak alınır. Bunun üzerinde
JEODEZİ8 1 Elipsoid Yüzünde Jeodezik Dik Koordinatlar (Soldner Koordinatları) ve Temel Ödev Hesapları Jeodezik dik koordinatları tanımlamak için önce bir meridyen x ekseni olarak alınır. Bunun üzerinde
CEV 361 CBS ve UA. Koordinat ve Projeksiyon Sistemleri. Yrd. Doç. Dr. Özgür ZEYDAN Yerin Şekli
 CEV 361 CBS ve UA Koordinat ve Projeksiyon Sistemleri Yrd. Doç. Dr. Özgür ZEYDAN http://cevre.beun.edu.tr/zeydan/ Yerin Şekli 1 Yerin Şekli Ekvator çapı: 12756 km Kuzey kutuptan güney kutuba çap: 12714
CEV 361 CBS ve UA Koordinat ve Projeksiyon Sistemleri Yrd. Doç. Dr. Özgür ZEYDAN http://cevre.beun.edu.tr/zeydan/ Yerin Şekli 1 Yerin Şekli Ekvator çapı: 12756 km Kuzey kutuptan güney kutuba çap: 12714
EKVATORAL KOORDİNAT SİSTEMİ_devam. Serap Ak
 EKVATORAL KOORDİNAT SİSTEMİ_devam http://star-www.st-and.ac.uk/~fv/webnotes/chapter5.htm http://star-www.st-and.ac.uk/~fv/webnotes/chapter4.htm Gök küresinde bulunan önemli yıldızların ekvatoral koordinatları
EKVATORAL KOORDİNAT SİSTEMİ_devam http://star-www.st-and.ac.uk/~fv/webnotes/chapter5.htm http://star-www.st-and.ac.uk/~fv/webnotes/chapter4.htm Gök küresinde bulunan önemli yıldızların ekvatoral koordinatları
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
BÜLENT ECEVİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT SİSTEMLERİ. Prof.Dr.Rasim Deniz
 BÜLENT ECEVİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT SİSTEMLERİ Prof.Dr.Rasim Deniz Zonguldak, 2014 YERSEL KOORDİNAT SİSTEMLERİ 1-Genel Yer üzerindeki konumların belirlenmesi
BÜLENT ECEVİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT SİSTEMLERİ Prof.Dr.Rasim Deniz Zonguldak, 2014 YERSEL KOORDİNAT SİSTEMLERİ 1-Genel Yer üzerindeki konumların belirlenmesi
AST404 GÖZLEMSEL ASTRONOMİ HAFTALIK UYGULAMA DÖKÜMANI
 AST404 GÖZLEMSEL ASTRONOMİ HAFTALIK UYGULAMA DÖKÜMANI Öğrenci Numarası: I. / II. Öğretim: Adı Soyadı: İmza: HAFTA 02 1. KONU: KOORDİNAT SİSTEMLERİ 2. İÇERİK Küresel Koordinat Sistemleri Coğrafi Koordinat
AST404 GÖZLEMSEL ASTRONOMİ HAFTALIK UYGULAMA DÖKÜMANI Öğrenci Numarası: I. / II. Öğretim: Adı Soyadı: İmza: HAFTA 02 1. KONU: KOORDİNAT SİSTEMLERİ 2. İÇERİK Küresel Koordinat Sistemleri Coğrafi Koordinat
31.10.2014. CEV 361 CBS ve UA. Koordinat ve Projeksiyon Sistemleri. Öğr. Gör. Özgür ZEYDAN http://cevre.beun.edu.tr/zeydan/ Yerin Şekli
 CEV 361 CBS ve UA Koordinat ve Projeksiyon Sistemleri Öğr. Gör. Özgür ZEYDAN http://cevre.beun.edu.tr/zeydan/ Yerin Şekli 1 Yerin Şekli Ekvator çapı: 12756 km Kuzey kutuptan güney kutuba çap: 12714 km
CEV 361 CBS ve UA Koordinat ve Projeksiyon Sistemleri Öğr. Gör. Özgür ZEYDAN http://cevre.beun.edu.tr/zeydan/ Yerin Şekli 1 Yerin Şekli Ekvator çapı: 12756 km Kuzey kutuptan güney kutuba çap: 12714 km
Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü TOPOGRAFYA (HRT3351) Yrd. Doç. Dr. Ercenk ATA
 Yrd. Doç. Dr. Ercenk ATA") Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü 4. HAFTA KOORDİNAT SİSTEMLERİ VE HARİTA PROJEKSİYONLARI Coğrafi Koordinat Sistemi Yeryüzü üzerindeki bir noktanın konumunun enlem
Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü 4. HAFTA KOORDİNAT SİSTEMLERİ VE HARİTA PROJEKSİYONLARI Coğrafi Koordinat Sistemi Yeryüzü üzerindeki bir noktanın konumunun enlem
JDF 242 JEODEZİK ÖLÇMELER 2. HAFTA DERS SUNUSU. Yrd. Doç. Dr. Hüseyin KEMALDERE
 JDF 242 JEODEZİK ÖLÇMELER 2. HAFTA DERS SUNUSU Yrd. Doç. Dr. Hüseyin KEMALDERE 3 boyutlu uzayda Jeoit Z Y X Dünyaya en uygun elipsoid modeli ve yer merkezli dik koordinat sistemi Ülkemizde 2005
JDF 242 JEODEZİK ÖLÇMELER 2. HAFTA DERS SUNUSU Yrd. Doç. Dr. Hüseyin KEMALDERE 3 boyutlu uzayda Jeoit Z Y X Dünyaya en uygun elipsoid modeli ve yer merkezli dik koordinat sistemi Ülkemizde 2005
Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi
 JEODEZİ 6 1 Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi Jeodezik gözlemler, hesaplamalarda kullanılmadan önce, referans elipsoidin yüzeyine indirgenir. Bu işlem, arazide yapılan gözlemler l jeoidin
JEODEZİ 6 1 Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi Jeodezik gözlemler, hesaplamalarda kullanılmadan önce, referans elipsoidin yüzeyine indirgenir. Bu işlem, arazide yapılan gözlemler l jeoidin
JEOİD ve JEOİD BELİRLEME
 JEOİD ve JEOİD BELİRLEME İÇİNDEKİLER GİRİŞ JEODEZİDE YÜKSEKLİK SİSTEMLERİ Jeopotansiyel Yükseklikler (C) Dinamik Yükseklikler (H D ) Normal Yükseklik (H N ) Elipsoidal Yükseklik Ortometrik Yükseklik Atmosferik
JEOİD ve JEOİD BELİRLEME İÇİNDEKİLER GİRİŞ JEODEZİDE YÜKSEKLİK SİSTEMLERİ Jeopotansiyel Yükseklikler (C) Dinamik Yükseklikler (H D ) Normal Yükseklik (H N ) Elipsoidal Yükseklik Ortometrik Yükseklik Atmosferik
GDM 417 ASTRONOMİ. Gökyüzünde Hareketler
 GDM 417 ASTRONOMİ Gökyüzünde Hareketler Günlük Hareket ve Gökyüzü Gökküresi: Dünyamız dışındaki bütün gökcisimlerinin üzerinde yer aldığını, üzerinde hareket ettiklerini varsaydığımız, merkezinde Yer in
GDM 417 ASTRONOMİ Gökyüzünde Hareketler Günlük Hareket ve Gökyüzü Gökküresi: Dünyamız dışındaki bütün gökcisimlerinin üzerinde yer aldığını, üzerinde hareket ettiklerini varsaydığımız, merkezinde Yer in
CBS. Projeksiyon. CBS Projeksiyon. Prof.Dr. Emin Zeki BAŞKENT. Karadeniz Teknik Üniversitesi Orman Fakültesi 2010, EZB
 Prof.Dr. Emin Zeki BAŞKENT Karadeniz Teknik Üniversitesi Orman Fakültesi Elipsoid şeklindeki dünyanın bir düzlem üzerine indirilmesi ve koordinatlarının matematiksel dönüşümleridir. Harita üç şekilde projeksiyonu
Prof.Dr. Emin Zeki BAŞKENT Karadeniz Teknik Üniversitesi Orman Fakültesi Elipsoid şeklindeki dünyanın bir düzlem üzerine indirilmesi ve koordinatlarının matematiksel dönüşümleridir. Harita üç şekilde projeksiyonu
HARİTA PROJEKSİYONLARI
 1 HARİTA PROJEKSİYONLARI Haritacılık mesleğinin faaliyetlerinden birisi, yeryüzünün bütününün ya da bir parçasının haritasını yapmaktır. Harita denilen şey ise, basit anlamıyla, kapsadığı alandaki çeşitli
1 HARİTA PROJEKSİYONLARI Haritacılık mesleğinin faaliyetlerinden birisi, yeryüzünün bütününün ya da bir parçasının haritasını yapmaktır. Harita denilen şey ise, basit anlamıyla, kapsadığı alandaki çeşitli
Sistemin Bileşenleri
 International Terrestrial Reference System (ITRS) International Terrestrial Reference Frame (ITRF) Sistemin Bileşenleri International Terrestrial Reference System International Terrestrial Reference Frame
International Terrestrial Reference System (ITRS) International Terrestrial Reference Frame (ITRF) Sistemin Bileşenleri International Terrestrial Reference System International Terrestrial Reference Frame
JEODEZİ. Şekil1: Yerin şekli YERİN ŞEKLİ JEOİD
 JEODEZİ Jeodezi, üç boyutlu ve zaman değişkenli uzayda, çekim alanı ile birlikte, yeryuvarının ve öteki gök cisimlerinin ölçülmesi ve haritaya aktarılması ile uğraşan bilim dalıdır. Şekil1: Yerin şekli
JEODEZİ Jeodezi, üç boyutlu ve zaman değişkenli uzayda, çekim alanı ile birlikte, yeryuvarının ve öteki gök cisimlerinin ölçülmesi ve haritaya aktarılması ile uğraşan bilim dalıdır. Şekil1: Yerin şekli
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
Küre Küre Üzerinde Hesap. Ders Sorumlusu Prof. Dr. Mualla YALÇINKAYA 2018
 Küre Küre Üzerinde Hesap Ders Sorumlusu Prof. Dr. Mualla YALÇINKAYA 2018 Küre ve Küre ile İlgili Tanımlar Küre: «Merkez» adı verilen bir noktaya eşit uzaklıktaki noktaların bir araya getirilmesiyle, ya
Küre Küre Üzerinde Hesap Ders Sorumlusu Prof. Dr. Mualla YALÇINKAYA 2018 Küre ve Küre ile İlgili Tanımlar Küre: «Merkez» adı verilen bir noktaya eşit uzaklıktaki noktaların bir araya getirilmesiyle, ya
KÜRESEL VE ELİPSOİDAL KOORDİNATLARIN KARŞİLAŞTİRİLMASİ
 KÜRESEL VE ELİPSOİDAL KOORDİNATLARIN KARŞİLAŞTİRİLMASİ Doç. Dr. İsmail Hakkı GÜNEŞ İstanbul Teknik Üniversitesi ÖZET Küresel ve Elipsoidal koordinatların.karşılaştırılması amacı ile bir noktasında astronomik
KÜRESEL VE ELİPSOİDAL KOORDİNATLARIN KARŞİLAŞTİRİLMASİ Doç. Dr. İsmail Hakkı GÜNEŞ İstanbul Teknik Üniversitesi ÖZET Küresel ve Elipsoidal koordinatların.karşılaştırılması amacı ile bir noktasında astronomik
HARİTA DAİRESİ BAŞKANLIĞI. İSTANBUL TKBM HİZMET İÇİ EĞİTİM Temel Jeodezi ve GNSS
 HİZMET İÇİ EĞİTİM MART 2015 İSTANBUL TAPU VE KADASTRO II.BÖLGE MÜDÜRLÜĞÜ SUNUM PLANI 1- Jeodezi 2- Koordinat sistemleri 3- GNSS 3 JEODEZİ Jeodezi; Yeryuvarının şekil, boyut, ve gravite alanı ile zamana
HİZMET İÇİ EĞİTİM MART 2015 İSTANBUL TAPU VE KADASTRO II.BÖLGE MÜDÜRLÜĞÜ SUNUM PLANI 1- Jeodezi 2- Koordinat sistemleri 3- GNSS 3 JEODEZİ Jeodezi; Yeryuvarının şekil, boyut, ve gravite alanı ile zamana
Genel Olarak Bir Yüzeyin Diğer Bir Yüzeye Projeksiyonu
 JEODEZİ9 1 Genel Olarak Bir Yüzeyin Diğer Bir Yüzeye Projeksiyonu u ve v Gauss parametrelerine bağlı olarak r r ( u, v) yer vektörü ile verilmiş bir Ω yüzeyinin, u*, v* Gauss parametreleri ile verilmiş
JEODEZİ9 1 Genel Olarak Bir Yüzeyin Diğer Bir Yüzeye Projeksiyonu u ve v Gauss parametrelerine bağlı olarak r r ( u, v) yer vektörü ile verilmiş bir Ω yüzeyinin, u*, v* Gauss parametreleri ile verilmiş
Haritası yapılan bölge (dilim) Orta meridyen λ. Kuzey Kutbu. Güney Kutbu. Transversal silindir (projeksiyon yüzeyi) Yerin dönme ekseni
 Orta meridyen λ. Kuzey Kutbu. Güney Kutbu. Transversal silindir (projeksiyon yüzeyi) Yerin dönme ekseni") 1205321/1206321 Türkiye de Topografik Harita Yapımı Ölçek Büyük Ölçekli Haritalar 1:1000,1:5000 2005 tarihli BÖHHBYY ne göre değişik kamu kurumlarınca üretilirler. Datum: GRS80 Projeksiyon: Transverse
1205321/1206321 Türkiye de Topografik Harita Yapımı Ölçek Büyük Ölçekli Haritalar 1:1000,1:5000 2005 tarihli BÖHHBYY ne göre değişik kamu kurumlarınca üretilirler. Datum: GRS80 Projeksiyon: Transverse
Harita Projeksiyonları
 Harita Projeksiyonları Bölüm : Azimutal Projeksiyonlar Prof.Dr. İ. Öztuğ BİLDİRİCİ Azimutal Projeksiyonlar Projeksiyon yüzeyi düzlemdir. Normal, transversal ve eğik konumlu olarak uygulanan azimutal projeksiyonlar,
Harita Projeksiyonları Bölüm : Azimutal Projeksiyonlar Prof.Dr. İ. Öztuğ BİLDİRİCİ Azimutal Projeksiyonlar Projeksiyon yüzeyi düzlemdir. Normal, transversal ve eğik konumlu olarak uygulanan azimutal projeksiyonlar,
Kuzey Kutbu. Yerin dönme ekseni
 1205321/1206321 Türkiye de Topoğrafik Harita Yapımı Ölçek Büyük Ölçekli Haritalar 1:1000,1:5000 2005 tarihli BÖHHBYY ne göre değişik kamu kurumlarınca üretilirler. Datum: GRS80 Projeksiyon: Transverse
1205321/1206321 Türkiye de Topoğrafik Harita Yapımı Ölçek Büyük Ölçekli Haritalar 1:1000,1:5000 2005 tarihli BÖHHBYY ne göre değişik kamu kurumlarınca üretilirler. Datum: GRS80 Projeksiyon: Transverse
Uydu Jeodezisi. Lisans Ders Notları. Yrd. Doç. Dr. Aydın ÜSTÜN. Konya, 2010. Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi
 Uydu Jeodezisi Lisans Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi Harita Mühendisliği Bölümü Konya, 2010 A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.02.11.10)
Uydu Jeodezisi Lisans Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi Harita Mühendisliği Bölümü Konya, 2010 A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.02.11.10)
Projeksiyon Kavramı. Meridyenler ve paraleller eşitliklere göre düzleme aktarılır. 1) m : harita üzerinde paralelleri çizen yarıçap
 m : harita üzerinde paralelleri çizen yarıçap") Projeksiyon Kavramı Meridyenler ve paraleller eşitliklere göre düzleme aktarılır. 1) m : harita üzerinde paralelleri çizen yarıçap ) α: harita üzerinde meridyenler arasındaki açıyı ifade eder. m = α =
Projeksiyon Kavramı Meridyenler ve paraleller eşitliklere göre düzleme aktarılır. 1) m : harita üzerinde paralelleri çizen yarıçap ) α: harita üzerinde meridyenler arasındaki açıyı ifade eder. m = α =
ULUSAL STANDART TOPOGRAFİK HARİTA PROJEKSİYONLARI
 ULUSAL STANDART TOPOGRAFİK HARİTA PROJEKSİYONLARI Doç.Dr. Türkay GÖKGÖZ http://www.yarbis.yildiz.edu.tr/gokgoz İnşaat Fakültesi Harita Mühendisliği Bölümü Kartografya Anabilim Dalı BÜYÜK ÖLÇEKLİ HARİTA
ULUSAL STANDART TOPOGRAFİK HARİTA PROJEKSİYONLARI Doç.Dr. Türkay GÖKGÖZ http://www.yarbis.yildiz.edu.tr/gokgoz İnşaat Fakültesi Harita Mühendisliği Bölümü Kartografya Anabilim Dalı BÜYÜK ÖLÇEKLİ HARİTA
Uzaktan Algılama ve Coğrafi Bilgi Sistemlerinde Jeodezik Kavramlar
 Uzaktan Algılama ve Coğrafi Bilgi Sistemlerinde Jeodezik Kavramlar TASLAK DERS NOTU Doç.Dr. Niyazi Arslan Çukurova Üniversitesi, Harita Mühendisliği Bölümü, Ceyhan, Adana, 2014 İçindekiler Giriş Referans
Uzaktan Algılama ve Coğrafi Bilgi Sistemlerinde Jeodezik Kavramlar TASLAK DERS NOTU Doç.Dr. Niyazi Arslan Çukurova Üniversitesi, Harita Mühendisliği Bölümü, Ceyhan, Adana, 2014 İçindekiler Giriş Referans
Harita Projeksiyonları
 Özellikler Harita Projeksiyonları Bölüm 3: Silindirik Projeksiyonlar İzdüşüm yüzeyi, küreyi saran ya da kesen bir silindir seçilir. Silindirik projeksiyonlar genellikle normal konumda ekvator bölgesinde
Özellikler Harita Projeksiyonları Bölüm 3: Silindirik Projeksiyonlar İzdüşüm yüzeyi, küreyi saran ya da kesen bir silindir seçilir. Silindirik projeksiyonlar genellikle normal konumda ekvator bölgesinde
2011-2012 GÜZ DÖNEMİ UYDU JEODEZİSİ DERS NOTLARI
 YILDIZ TEKNİK ÜNİVERSİTESİ İNŞT FKÜLTESİ HRİT MÜHENDİSLİĞİ BÖLÜMÜ 011-01 GÜZ DÖNEMİ UYDU JEODEZİSİ DERS NOTLRI Lisans: Yıldız Teknik Üniversitesi Harita Mühendisliği Yüksek Lisans: Yıldız Teknik Üniversitesi
YILDIZ TEKNİK ÜNİVERSİTESİ İNŞT FKÜLTESİ HRİT MÜHENDİSLİĞİ BÖLÜMÜ 011-01 GÜZ DÖNEMİ UYDU JEODEZİSİ DERS NOTLRI Lisans: Yıldız Teknik Üniversitesi Harita Mühendisliği Yüksek Lisans: Yıldız Teknik Üniversitesi
Astronomi Aletleri A105. Serdar Evren
 Astronomi Aletleri A105 Serdar Evren Bölüm 1 GÖKYÜZÜNDE HAREKET Takvim Terimleri Gün Yer in kendi ekseni etrafında bir tam dönüş zamanı Yıl Yer in Güneş etrafında bir tam dolanım zamanı Ay Ay ın Yer etrafında
Astronomi Aletleri A105 Serdar Evren Bölüm 1 GÖKYÜZÜNDE HAREKET Takvim Terimleri Gün Yer in kendi ekseni etrafında bir tam dönüş zamanı Yıl Yer in Güneş etrafında bir tam dolanım zamanı Ay Ay ın Yer etrafında
YILDIZ TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ DATUM DÖNÜŞÜMLERİ. Jeo. ve Fot. Müh. Aydın ÜSTÜN
 YILDIZ TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ DATUM DÖNÜŞÜMLERİ Jeo. ve Fot. Müh. Aydın ÜSTÜN F.B.E. Jeodezi ve Fotogrametri Mühendisliği Anabilim Dalında hazırlanan YÜKSEK LİSANS TEZİ Tez Danışmanı
YILDIZ TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ DATUM DÖNÜŞÜMLERİ Jeo. ve Fot. Müh. Aydın ÜSTÜN F.B.E. Jeodezi ve Fotogrametri Mühendisliği Anabilim Dalında hazırlanan YÜKSEK LİSANS TEZİ Tez Danışmanı
JEODEZİDE KULLANILAN KOORDİNATLAR, BUNLARIN BİRBİRLERİNE DÖNÜŞÜMLERİ ve PROJEKSİYON
 JEODEZİDE KULLANILAN KOORDİNATLAR, BUNLARIN BİRBİRLERİNE DÖNÜŞÜMLERİ ve PROJEKSİYON Ekrem ULSOY (İstanbul) I KOORDİNATLAR. Jeodezide koordinatlar, yer yüzündeki noktaların belirlenmesinde kullanılır. Bu
JEODEZİDE KULLANILAN KOORDİNATLAR, BUNLARIN BİRBİRLERİNE DÖNÜŞÜMLERİ ve PROJEKSİYON Ekrem ULSOY (İstanbul) I KOORDİNATLAR. Jeodezide koordinatlar, yer yüzündeki noktaların belirlenmesinde kullanılır. Bu
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
AVRASYA ÜNİVERSİTESİ
 Ders Tanıtım Formu Dersin Adı Öğretim Dili MATEMATİK JEODEZİ Türkçe Dersin Verildiği Düzey Ön Lisans ( ) Lisans (x) Yüksek Lisans( ) Doktora( ) Eğitim Öğretim Sistemi Örgün Öğretim (x) Uzaktan Öğretim(
Ders Tanıtım Formu Dersin Adı Öğretim Dili MATEMATİK JEODEZİ Türkçe Dersin Verildiği Düzey Ön Lisans ( ) Lisans (x) Yüksek Lisans( ) Doktora( ) Eğitim Öğretim Sistemi Örgün Öğretim (x) Uzaktan Öğretim(
JEODEZİ DATUM KOORDİNAT SİSTEMLERİ HARİTA PROJEKSİYONLARI
 JEODEZİ DATUM KOORDİAT SİSTEMLERİ HARİTA PROJEKSİYOLARI Yer yüzeyi eredeyim? Deniz Elipsoid Geoid BÜ KRDAE JEODEZİ AABİLİM DALI Jeodezi; Yeryuvarının şekil, boyut, ve gravite alanı ile zamana bağlı değişimlerinin
JEODEZİ DATUM KOORDİAT SİSTEMLERİ HARİTA PROJEKSİYOLARI Yer yüzeyi eredeyim? Deniz Elipsoid Geoid BÜ KRDAE JEODEZİ AABİLİM DALI Jeodezi; Yeryuvarının şekil, boyut, ve gravite alanı ile zamana bağlı değişimlerinin
HRT 105 HARİTA MÜHENDİSLİĞİNE GİRİŞ
 HRT 105 HARİTA MÜHENDİSLİĞİNE GİRİŞ Temel Haritacılık Konuları_Ders# 5 Yrd.Doç.Dr. H.Ebru ÇOLAK KTÜ. Mühendislik Fakültesi Harita Mühendisliği Bölümü TEMEL HARİTA BİLGİLERİ JEODEZİ Yeryuvarının şekil,
HRT 105 HARİTA MÜHENDİSLİĞİNE GİRİŞ Temel Haritacılık Konuları_Ders# 5 Yrd.Doç.Dr. H.Ebru ÇOLAK KTÜ. Mühendislik Fakültesi Harita Mühendisliği Bölümü TEMEL HARİTA BİLGİLERİ JEODEZİ Yeryuvarının şekil,
Kış Vaktinde Yaz Saati ve Astronomik Zaman Ölçümleri
 Kış Vaktinde Yaz Saati ve Astronomik Zaman Ölçümleri Yaz saati, kış saati, saatler ileri geri derken, ülkemizde son yıllarda, büyükten küçüğe herkes aslında astronomik bir olguyu konuşuyor. Saat dilimimizin
Kış Vaktinde Yaz Saati ve Astronomik Zaman Ölçümleri Yaz saati, kış saati, saatler ileri geri derken, ülkemizde son yıllarda, büyükten küçüğe herkes aslında astronomik bir olguyu konuşuyor. Saat dilimimizin
küresel astronominin konusu zaman ve uydu konumlama sistemleri (gps- glonass)
") küresel astronominin konusu zaman ve uydu konumlama sistemleri (gps- glonass) ÖZET Doç. Dr. Burhan C. IŞIK (YTÜ Öğretim Üyesi) Bu yazıda küresel astronominin konusu olan zaman için Dünya Zamanı UT, Astronomik
küresel astronominin konusu zaman ve uydu konumlama sistemleri (gps- glonass) ÖZET Doç. Dr. Burhan C. IŞIK (YTÜ Öğretim Üyesi) Bu yazıda küresel astronominin konusu olan zaman için Dünya Zamanı UT, Astronomik
GÜNEŞ YÖRÜNGESİ TEMEL ÇİZİMLERİ
 GÜNEŞ YÖRÜNGESİ TEMEL ÇİZİMLERİ için ÖNSÖZ Yeryüzünün herhangi bir noktasında ve yılın herhangi bir gününün istenen bir zamanında, güneşin gökyüzündeki yeri, bilgisayar programları ile elde edilebilmektedir.
GÜNEŞ YÖRÜNGESİ TEMEL ÇİZİMLERİ için ÖNSÖZ Yeryüzünün herhangi bir noktasında ve yılın herhangi bir gününün istenen bir zamanında, güneşin gökyüzündeki yeri, bilgisayar programları ile elde edilebilmektedir.
Parametrik doğru denklemleri 1
 Parametrik doğru denklemleri 1 A noktasından geçen, doğrultman (doğrultu) vektörü w olan d doğrusunun, k parametresine göre parametrik denklemi: AP k w P A k w P A k w P A k W (P değişken nokta) A w P
Parametrik doğru denklemleri 1 A noktasından geçen, doğrultman (doğrultu) vektörü w olan d doğrusunun, k parametresine göre parametrik denklemi: AP k w P A k w P A k w P A k W (P değişken nokta) A w P
Coğrafi Bilgi Sistemlerine Giriş. Ünite 3 - Coğrafi Konumlandırma
 Coğrafi Bilgi Sistemlerine Giriş Ünite 3 - Coğrafi Konumlandırma İçerik Giriş Yerkürenin matematiksel modeli Yerküre üzerinde haritalanacak bölgenin matematiksel modeli (datum) GİRİŞ Yeryüzündeki bir mekanın
Coğrafi Bilgi Sistemlerine Giriş Ünite 3 - Coğrafi Konumlandırma İçerik Giriş Yerkürenin matematiksel modeli Yerküre üzerinde haritalanacak bölgenin matematiksel modeli (datum) GİRİŞ Yeryüzündeki bir mekanın
GÖKYÜZÜNDE HARKET. Ünal Ertan Sabancı Üniversitesi. DAY - Galileo Öğretmenler Ağı Çalıştayı Ağustos 2009
 GÖKYÜZÜNDE HARKET Ünal Ertan Sabancı Üniversitesi DAY - Galileo Öğretmenler Ağı Çalıştayı Ağustos 2009 GÖKYÜZÜ YIL BOYUNCA NASIL DEĞİ İYOR? Sakarya 1 OCAK 2008 22:00 Sakarya 1 UBAT 2008 22:00 Sakarya 1
GÖKYÜZÜNDE HARKET Ünal Ertan Sabancı Üniversitesi DAY - Galileo Öğretmenler Ağı Çalıştayı Ağustos 2009 GÖKYÜZÜ YIL BOYUNCA NASIL DEĞİ İYOR? Sakarya 1 OCAK 2008 22:00 Sakarya 1 UBAT 2008 22:00 Sakarya 1
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
Yrd. Doç. Dr. Aycan M. MARANGOZ. BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF329 FOTOGRAMETRİ I DERSi NOTLARI
 FOTOGRAMETRİ I GEOMETRİK ve MATEMATİK TEMELLER Yrd. Doç. Dr. Aycan M. MARANGOZ BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF329 FOTOGRAMETRİ I DERSi NOTLARI http://geomatik.beun.edu.tr/marangoz/
FOTOGRAMETRİ I GEOMETRİK ve MATEMATİK TEMELLER Yrd. Doç. Dr. Aycan M. MARANGOZ BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF329 FOTOGRAMETRİ I DERSi NOTLARI http://geomatik.beun.edu.tr/marangoz/
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Dünya nın şekli. Küre?
 Dünya nın şekli Küre? Dünya nın şekli Elipsoid? Aslında dünyanın şekli tam olarak bunlardan hiçbiri değildir. Biz ilkokulda ve lisede ilk önce yuvarlak olduğunu sonra ortadan basık olduğunu sonrada elipsoid
Dünya nın şekli Küre? Dünya nın şekli Elipsoid? Aslında dünyanın şekli tam olarak bunlardan hiçbiri değildir. Biz ilkokulda ve lisede ilk önce yuvarlak olduğunu sonra ortadan basık olduğunu sonrada elipsoid
İTÜ DERS KATALOG FORMU (COURSE CATALOGUE FORM)
") İTÜ DERS KATALOG FORMU (COURSE CATALOGUE FORM) Dersin Adı Jeodezide Koordinat Sistemleri Course Name Coordinate Systems in Geodesy Kodu (Code) Yarıyılı (Semester) Kredisi (Local Credits) AKTS Kredisi (ECTS
İTÜ DERS KATALOG FORMU (COURSE CATALOGUE FORM) Dersin Adı Jeodezide Koordinat Sistemleri Course Name Coordinate Systems in Geodesy Kodu (Code) Yarıyılı (Semester) Kredisi (Local Credits) AKTS Kredisi (ECTS
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Fotogrametrinin Optik ve Matematik Temelleri
 Fotogrametrinin Optik ve Matematik Temelleri Resim düzlemi O : İzdüşüm (projeksiyon ) merkezi P : Arazi noktası H : Asal nokta N : Nadir noktası c : Asal uzaklık H OH : Asal eksen (Alım ekseni) P OP :
Fotogrametrinin Optik ve Matematik Temelleri Resim düzlemi O : İzdüşüm (projeksiyon ) merkezi P : Arazi noktası H : Asal nokta N : Nadir noktası c : Asal uzaklık H OH : Asal eksen (Alım ekseni) P OP :
Dünya nın Şekli ve Hareketleri
 Dünya nın Şekli ve Hareketleri YGS Coğrafya 1 Dünya nın Şekli ve Hareketleri Dünya nın Şekli ve Hareketleri başlıklı hazırladığımız bu yazıda, dünyanın şeklinin getirdiği sonuçları; enlem, boylam ve meridyenlerin
Dünya nın Şekli ve Hareketleri YGS Coğrafya 1 Dünya nın Şekli ve Hareketleri Dünya nın Şekli ve Hareketleri başlıklı hazırladığımız bu yazıda, dünyanın şeklinin getirdiği sonuçları; enlem, boylam ve meridyenlerin
Yrd. Doç. Dr. Aycan M. MARANGOZ. BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF329 FOTOGRAMETRİ I DERSi NOTLARI
 FOTOGRAMETRİ I GEOMETRİK ve MATEMATİK TEMELLER Yrd. Doç. Dr. Aycan M. MARANGOZ BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF329 FOTOGRAMETRİ I DERSi NOTLARI http://geomatik.beun.edu.tr/marangoz/
FOTOGRAMETRİ I GEOMETRİK ve MATEMATİK TEMELLER Yrd. Doç. Dr. Aycan M. MARANGOZ BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF329 FOTOGRAMETRİ I DERSi NOTLARI http://geomatik.beun.edu.tr/marangoz/
Dr. Fatih AY. Tel:
 Dr. Fatih AY Tel: 0 388 225 22 55 ayfatih@nigde.edu.tr Güneş Sabiti (The Solar Constant) ve Atmosfer Dışı Işınımın Değişimi Güneş Açıları Atmosfer Dışında Yatay Düzleme Gelen Güneş Işınımı 2 Bu bölümde
Dr. Fatih AY Tel: 0 388 225 22 55 ayfatih@nigde.edu.tr Güneş Sabiti (The Solar Constant) ve Atmosfer Dışı Işınımın Değişimi Güneş Açıları Atmosfer Dışında Yatay Düzleme Gelen Güneş Işınımı 2 Bu bölümde
Gravite alanı belirlemede modern yaklaşımlar
 Gravite alanı belirlemede modern yaklaşımlar Lisansüstü Ders Notları Aydın ÜSTÜN Selçuk Üniversitesi Harita Mühendisliği austun@selcuk.edu.tr Konya, 2016 A. Üstün (Selçuk Üniversitesi) Gravite alanı belirleme
Gravite alanı belirlemede modern yaklaşımlar Lisansüstü Ders Notları Aydın ÜSTÜN Selçuk Üniversitesi Harita Mühendisliği austun@selcuk.edu.tr Konya, 2016 A. Üstün (Selçuk Üniversitesi) Gravite alanı belirleme
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
Koordinat Dönüşümleri (V )
") KOORDİNAT DÖNÜŞÜMLERİ ve FARKLI KOORDİNAT SİSTEMLERİ İLE ÇALIŞMA FieldGenius ile birden fazla koordinat sistemi arasında geçiş yaparak çalışmak mümkündür. Yaygın olarak kullanılan masaüstü harita ve CAD
KOORDİNAT DÖNÜŞÜMLERİ ve FARKLI KOORDİNAT SİSTEMLERİ İLE ÇALIŞMA FieldGenius ile birden fazla koordinat sistemi arasında geçiş yaparak çalışmak mümkündür. Yaygın olarak kullanılan masaüstü harita ve CAD
GPŞ Sistemi İle Şehir Nirengi Ağlarının Analizi
 GPŞ Sistemi İle Şehir Nirengi Ağlarının Analizi Nihat ERSOY* ÖZET Şehir nirengi ağlarının değerlendirilmesinde, 1987 yılında klasik ölçme yöntemleri ile ülke nirengi ağına dayalı 3. derece bir yatay kontrol
GPŞ Sistemi İle Şehir Nirengi Ağlarının Analizi Nihat ERSOY* ÖZET Şehir nirengi ağlarının değerlendirilmesinde, 1987 yılında klasik ölçme yöntemleri ile ülke nirengi ağına dayalı 3. derece bir yatay kontrol
T] = (a- A) cotgş (6) şeklindedir. (1) ve (6) formüllerinin bir araya getirilmesi ile (a A) = (X L) sincp (7) Laplace denklemi elde edilir.
![T] = (a- A) cotgş (6) şeklindedir. (1) ve (6) formüllerinin bir araya getirilmesi ile (a A) = (X L) sincp (7) Laplace denklemi elde edilir.](/thumbs/55/35591809.jpg "T] = (a- A) cotgş (6) şeklindedir. (1) ve (6) formüllerinin bir araya getirilmesi ile (a A) = (X L) sincp (7) Laplace denklemi elde edilir.") * = 2 + rf (3) \ cos AQ, r\ % sin A o (4) \ cos A o + IQ sin A o = % (5) bağıntılarıda yazılabilir. (1) eşitliğine göre elde edilen r\ doğu-batı bileşeni astronomik ve leşenleri elde edilmiş oldu. MZ A
* = 2 + rf (3) \ cos AQ, r\ % sin A o (4) \ cos A o + IQ sin A o = % (5) bağıntılarıda yazılabilir. (1) eşitliğine göre elde edilen r\ doğu-batı bileşeni astronomik ve leşenleri elde edilmiş oldu. MZ A
1.Standart Referans Sistemleri, Gridler ve Ölçü Birimleri
 1.Standart Referans Sistemleri, Gridler ve Ölçü Birimleri Tema ayrımlı özel durumlar ve / veya ek gereksinimler, Bölüm 1.2 'de tanımlanan referans sistemleri, alt bölümde yer alan ölçü birimleri ve coğrafi
1.Standart Referans Sistemleri, Gridler ve Ölçü Birimleri Tema ayrımlı özel durumlar ve / veya ek gereksinimler, Bölüm 1.2 'de tanımlanan referans sistemleri, alt bölümde yer alan ölçü birimleri ve coğrafi
Elipsoid Üçgenlerinin Hesaplanması Yedek Hesap Yüzeyi olarak Küre
 Jeodezi 7 1 Elipsoid Üçgenlerinin Hesaplanması Yedek Hesap Yüzeyi olarak Küre Elipsoid yüzeyinin küçük parçalarında oluşan küçük üçgenlerin (kenarları 50-60 km den küçük) hesaplanmasında klasik jeodezide
Jeodezi 7 1 Elipsoid Üçgenlerinin Hesaplanması Yedek Hesap Yüzeyi olarak Küre Elipsoid yüzeyinin küçük parçalarında oluşan küçük üçgenlerin (kenarları 50-60 km den küçük) hesaplanmasında klasik jeodezide
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
YERSEL YÖNTEMLERLE ÖLÇÜLEN JEODEZİK AĞLARIN ÜÇ BOYUTLU DENGELENMESİ
 23 YERSEL YÖNTEMLERLE ÖLÇÜLEN JEODEZİK AĞLARIN ÜÇ BOYUTLU DENGELENMESİ Veysel ATASOY İ, GİRİŞ Jeodezinin günümüzdeki tanımı, üç boyutlu ve zaman değişkenli bir uzayda yerin çekim alanını da kapsamak koşuluyla
23 YERSEL YÖNTEMLERLE ÖLÇÜLEN JEODEZİK AĞLARIN ÜÇ BOYUTLU DENGELENMESİ Veysel ATASOY İ, GİRİŞ Jeodezinin günümüzdeki tanımı, üç boyutlu ve zaman değişkenli bir uzayda yerin çekim alanını da kapsamak koşuluyla
Ünite 3 - Konumlandırma
 Uzaktan Algılamaya Giriş Ünite 3 - Konumlandırma UA Verisi ve Coğrafi Konumlandırma Uzaktan Algılama ile elde edilen görüntü verileri coğrafi koordinatlar ile gelmektedir. Bu veriler her hücrenin orta
Uzaktan Algılamaya Giriş Ünite 3 - Konumlandırma UA Verisi ve Coğrafi Konumlandırma Uzaktan Algılama ile elde edilen görüntü verileri coğrafi koordinatlar ile gelmektedir. Bu veriler her hücrenin orta
UYDU JEODEZISI: ÖLÇME YÖNTEM VE TEKNIKLERI
 UYDU JEODEZISI: ÖLÇME YÖNTEM VE TEKNIKLERI Gözlem noktasına baglı yöntemler: Yerden uyduya Uydudan yer noktasına Uydudan uyduya Ölçünün cinsine baglı yöntemler: Dogrultu ölçmeleri (geometrik yöntem) Çift
UYDU JEODEZISI: ÖLÇME YÖNTEM VE TEKNIKLERI Gözlem noktasına baglı yöntemler: Yerden uyduya Uydudan yer noktasına Uydudan uyduya Ölçünün cinsine baglı yöntemler: Dogrultu ölçmeleri (geometrik yöntem) Çift
İÇİNDEKİLER. Ön Söz...2. Noktanın Analitik İncelenmesi...3. Doğrunun Analitiği Analitik Düzlemde Simetri...25
 İÇİNDEKİLER Ön Söz...2 Noktanın Analitik İncelenmesi...3 Doğrunun Analitiği...11 Analitik Düzlemde Simetri...25 Analitik Sistemde Eşitsizlikler...34 Çemberin Analitik İncelenmesi...40 Elips...58 Hiperbol...70
İÇİNDEKİLER Ön Söz...2 Noktanın Analitik İncelenmesi...3 Doğrunun Analitiği...11 Analitik Düzlemde Simetri...25 Analitik Sistemde Eşitsizlikler...34 Çemberin Analitik İncelenmesi...40 Elips...58 Hiperbol...70
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
T.C. MİLLİ SAVUNMA BAKANLIĞI HARİTA GENEL KOMUTANLIĞI HARİTA YÜKSEK TEKNİK OKULU KOMUTANLIĞI ANKARA
 T.C. MİLLİ SAVUNMA BAKANLIĞI HARİTA GENEL KOMUTANLIĞI HARİTA YÜKSEK TEKNİK OKULU KOMUTANLIĞI ANKARA ÇİFT STANDART DAİRELİ KONFORM LAMBERT PROJEKSİYONUNDA TÜRKİYE HARİTASININ YAPILMASI Hrt. Tğm. Soner ÖZDEMİR
T.C. MİLLİ SAVUNMA BAKANLIĞI HARİTA GENEL KOMUTANLIĞI HARİTA YÜKSEK TEKNİK OKULU KOMUTANLIĞI ANKARA ÇİFT STANDART DAİRELİ KONFORM LAMBERT PROJEKSİYONUNDA TÜRKİYE HARİTASININ YAPILMASI Hrt. Tğm. Soner ÖZDEMİR
DÜNYA NIN ŞEKLİ VE HAREKETLERİ
 DÜNYA NIN ŞEKLİ VE HAREKETLERİ YERKÜRE NİN ŞEKLİ Bilim ve teknolojik seviyeye bağlı olarak, İlk Çağ da Dünya mızın şekli, değişik biçimlerde tahmin ediliyordu. Dünya nın çevresi günümüzden yaklaşık 2.200
DÜNYA NIN ŞEKLİ VE HAREKETLERİ YERKÜRE NİN ŞEKLİ Bilim ve teknolojik seviyeye bağlı olarak, İlk Çağ da Dünya mızın şekli, değişik biçimlerde tahmin ediliyordu. Dünya nın çevresi günümüzden yaklaşık 2.200
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
JEODEZİK AĞLARIN TASARIMI (JEODEZİK AĞLARIN SINIFLANDIRILMASI, TÜRKİYE ULUSAL JEODEZİK AĞLARI)
") JEODEZİK AĞLARIN TASARIMI (JEODEZİK AĞLARIN SINIFLANDIRILMASI, TÜRKİYE ULUSAL JEODEZİK AĞLARI) 3.hafta, Ders 2 Prof. Dr. Mualla YALÇINKAYA, 2007 Yrd. Doç. Dr. Emine TANIR KAYIKÇI, 2017 Yeryüzünün bütününün
JEODEZİK AĞLARIN TASARIMI (JEODEZİK AĞLARIN SINIFLANDIRILMASI, TÜRKİYE ULUSAL JEODEZİK AĞLARI) 3.hafta, Ders 2 Prof. Dr. Mualla YALÇINKAYA, 2007 Yrd. Doç. Dr. Emine TANIR KAYIKÇI, 2017 Yeryüzünün bütününün
Fotogrametrinin Optik ve Matematik Temelleri
 Fotogrametrinin Optik ve Matematik Temelleri Resim düzlemi O : İzdüşüm (projeksiyon ) merkezi P : Arazi noktası H : Asal nokta N : Nadir noktası c : Asal uzaklık H OH : Asal eksen (Alım ekseni) P OP :
Fotogrametrinin Optik ve Matematik Temelleri Resim düzlemi O : İzdüşüm (projeksiyon ) merkezi P : Arazi noktası H : Asal nokta N : Nadir noktası c : Asal uzaklık H OH : Asal eksen (Alım ekseni) P OP :
Hakan AKÇIN* SUNU Ali ihsan ŞEKERTEKİN
 AÇIK İŞLETME MADENCİLİĞİ UYGULAMALARINDA GNSS ÖLÇÜLERİNDEN YÜKSEKLİK FARKLARININ GEOMETRİK NİVELMAN ÖLÇMELERİNDEN YÜKSEKLİK FARKLARI YERİNE KULLANIMI ÜZERİNE DENEYSEL BİR ARAŞTIRMA Hakan AKÇIN* SUNU Ali
AÇIK İŞLETME MADENCİLİĞİ UYGULAMALARINDA GNSS ÖLÇÜLERİNDEN YÜKSEKLİK FARKLARININ GEOMETRİK NİVELMAN ÖLÇMELERİNDEN YÜKSEKLİK FARKLARI YERİNE KULLANIMI ÜZERİNE DENEYSEL BİR ARAŞTIRMA Hakan AKÇIN* SUNU Ali
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok
 Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
Üç Boyutlu Uzayda Koordinat sistemi
 Üç Boyutlu Uzayda Koordinat sistemi Uzayda bir noktayı ifade edebilmek için ilk önce O noktasını (başlangıç noktası) ve bu noktadan geçen ve birbirine dik olan üç yönlü doğruyu seçerek sabitlememiz gerekir.
Üç Boyutlu Uzayda Koordinat sistemi Uzayda bir noktayı ifade edebilmek için ilk önce O noktasını (başlangıç noktası) ve bu noktadan geçen ve birbirine dik olan üç yönlü doğruyu seçerek sabitlememiz gerekir.
Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur.
 Üç Boyutlu Geometri Nokta (Point,Vertex) Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur. Kartezyen Koordinat Sistemi Uzayda bir noktayı tanımlamak
Üç Boyutlu Geometri Nokta (Point,Vertex) Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur. Kartezyen Koordinat Sistemi Uzayda bir noktayı tanımlamak
r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s
![r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s](/thumbs/55/37178256.jpg "r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s") Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
ARAZİ ÖLÇMELERİ Z P. O α X P. α = yatay açı. ω = düşey açı. µ =eğim açısı. ω + µ = 100 g
 Trigonometrik Fonksiyonlar Z Z P P ω µ P O α α = yatay açı P P ω = düşey açı µ =eğim açısı ω + µ = 100 g Şekil 9 üç Boyutlu koordinat sisteminde açı tiplerinin tasviri. Trigonometrik kavramlara geçmeden
Trigonometrik Fonksiyonlar Z Z P P ω µ P O α α = yatay açı P P ω = düşey açı µ =eğim açısı ω + µ = 100 g Şekil 9 üç Boyutlu koordinat sisteminde açı tiplerinin tasviri. Trigonometrik kavramlara geçmeden
Fotogrametride işlem adımları
 Fotogrametride işlem adımları Uçuş planının hazırlanması Arazide yer kontrol noktalarının tesisi Resim çekimi Değerlendirme Analitik değerlendirme Dijital değerlendirme Değerlendirme Analog değerlendirme
Fotogrametride işlem adımları Uçuş planının hazırlanması Arazide yer kontrol noktalarının tesisi Resim çekimi Değerlendirme Analitik değerlendirme Dijital değerlendirme Değerlendirme Analog değerlendirme
BÖLÜM 3: MATEMATİKSEL KARTOGRAFYA - TANIMLAR
 BÖLÜM 3: MATEMATİKEL KARTOGRAFYA - TANIMLAR Türkay Gökgöz (www.yildiz.edu.tr/~gokgoz) 3 İÇİNDEKİLER 3. Bir Haritanın Matematiksel Çatısı... 3-3 3.. Ölçek. 3-3 3... Kesir ölçek 3-3 3... Grafik ölçek.. 3-4
BÖLÜM 3: MATEMATİKEL KARTOGRAFYA - TANIMLAR Türkay Gökgöz (www.yildiz.edu.tr/~gokgoz) 3 İÇİNDEKİLER 3. Bir Haritanın Matematiksel Çatısı... 3-3 3.. Ölçek. 3-3 3... Kesir ölçek 3-3 3... Grafik ölçek.. 3-4
Prof. Dr. Ceyhun GÖL. Çankırı Karatekin Üniversitesi Orman Fakültesi Havza Yönetimi Anabilim Dalı
 Jeoloji Prof. Dr. Ceyhun GÖL Çankırı Karatekin Üniversitesi Orman Fakültesi Havza Yönetimi Anabilim Dalı Ders Konuları Jeolojinin tanımı ve tarihçesi Mineraller Güneş sistemi Dünyanın şekli ve hareketleri
Jeoloji Prof. Dr. Ceyhun GÖL Çankırı Karatekin Üniversitesi Orman Fakültesi Havza Yönetimi Anabilim Dalı Ders Konuları Jeolojinin tanımı ve tarihçesi Mineraller Güneş sistemi Dünyanın şekli ve hareketleri
Öğretim Yöntemi: Ders Başarı Ölçme Yöntemi: Ders Sunusu için:
 Dersin Amacı vs Ders Kodu: 179 (4. Yarıyıl) Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Öğretim Yöntemi: Yüz yüze, teorik ders anlatımı, pratik uyulamalar. Ders
Dersin Amacı vs Ders Kodu: 179 (4. Yarıyıl) Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Öğretim Yöntemi: Yüz yüze, teorik ders anlatımı, pratik uyulamalar. Ders
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
ORMAN VE SU İŞLERİ BAKANLIĞI Su Yönetimi Genel Müdürlüğü Taşkın ve Kuraklık Yönetimi Planlaması Dairesi Başkanlığı. Temel Harita Bilgisi
 ORMAN VE SU İŞLERİ BAKANLIĞI Su Yönetimi Genel Müdürlüğü Taşkın ve Kuraklık Yönetimi Planlaması Dairesi Başkanlığı Temel Harita Bilgisi Harita, yeryüzünün ölçeklendirilmiş ve düzleme aktarılmış bir sunumudur.
ORMAN VE SU İŞLERİ BAKANLIĞI Su Yönetimi Genel Müdürlüğü Taşkın ve Kuraklık Yönetimi Planlaması Dairesi Başkanlığı Temel Harita Bilgisi Harita, yeryüzünün ölçeklendirilmiş ve düzleme aktarılmış bir sunumudur.
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Yatay Eksen: Dürbünün etrafında döndüğü eksendir. Asal Eksen: Çekül doğrultusundaki eksen Düzeç Ekseni: Düzecin üzerinde bulunduğueksen Yöneltme
 Teodolit Yatay Eksen: Dürbünün etrafında döndüğü eksendir. Asal Eksen: Çekül doğrultusundaki eksen Düzeç Ekseni: Düzecin üzerinde bulunduğueksen Yöneltme Ekseni: Kıllar şebekesinin kesim noktası ile objektifin
Teodolit Yatay Eksen: Dürbünün etrafında döndüğü eksendir. Asal Eksen: Çekül doğrultusundaki eksen Düzeç Ekseni: Düzecin üzerinde bulunduğueksen Yöneltme Ekseni: Kıllar şebekesinin kesim noktası ile objektifin
TEMEL MEKANİK 5. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ
 HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ Öğr. Gör. RECEP KÖKÇAN Tel: +90 312 267 30 20 http://yunus.hacettepe.edu.tr/~rkokcan/ E-mail_1: rkokcan@hacettepe.edu.tr
HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ Öğr. Gör. RECEP KÖKÇAN Tel: +90 312 267 30 20 http://yunus.hacettepe.edu.tr/~rkokcan/ E-mail_1: rkokcan@hacettepe.edu.tr