31 Mart 2017 Cuma 23:59 tek epostada tek epostada
|
|
|
- Emel Durak
- 6 yıl önce
- İzleme sayısı:
Transkript
1 ELE /17 BAHAR - ÖDEV 2 Aşağıdaki soruları çözerek en geç 31 Mart 2017 Cuma gunu saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması, hem de sizlere yol göstermesi bakımından çıkması bazı örnekler verilmiştir. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen aşağıdaki noktalara dikkat edin: Ödevlerdeki dosyalar zaman zaman yüksek boyutlara ulaşabiliyor ve okulun eposta kotaları çok düşük olduğu için bizim kotalarımızın dolmasına sebep olabiliyor. Onun için lütfen tüm dosyalarınızı tek bir zip veya rar dosyasında topladıktan sonra okul eposta adreslerimize değil gmail adreslerimize ( ve ) tek epostada gönderin; ayrı ayrı iki eposta atmayın, tek epostada ikimize de gönderin. rar veya zip dosyalarınızı Ad-Soyad-Numara seklinde isimlendirin. Dosya isimlerinde Türkçe karakter kullanmayın. Örneğin numaralı Övünç Elbir isimli öğrenci, Ovunc-Elbir rar veya Ovunc-Elbir zip isimli tek bir dosyayı tek epostada yukarıdaki iki adrese göndermelidir. İstenen dosyayı tek epostada göndermelisiniz, bana ve asistana iki ayrı eposta atılması halinde koordinasyon sorunları oluşabilir, ödeviniz kabul edilmeyebilir veya geç gönderilmiş gibi değerlendirilebilir. Ödevle ilgili sorularınızı da yine tek epostada hem bana hem dersin asistanına gönderin; sadece bana gönderilen veya ayrı ayrı gönderilen epostalar cevapsız kalabilir. Soru 1. Genel Bilgiler... 2 Soru 1A... 2 Soru 1B... 3 Soru 1C... 3 SORU 2. Genel Bilgiler... 4 SORU 2.A... 4 SORU 2.B... 4 SORU 2.C SORU 2.D SORU 2.E... 23
2 Soru 1. Genel Bilgiler Ters sarkaç için aşağıdaki türevsel denklemler verilmiştir: Burada kg ve kg kutleleri, sisteme uygulanacak kuvveti, sürtünme katsayısını, yer çekimi ivmesini, çubuğun uzunluğunu göstermektedir. Soru 1A terssarkaccoz.m isimli bir fonksiyon sirasiyla m, M, l, g, f, F, y0, Tfin argümanlarını alacak, y0 başlangıç koşulu etrafında sistemin durumlarını çözdürüp ( ) çizdirecektir. Çözümle ilgili zaman vektörü tt, çözülen durumlar da yy vektöründe çıkış olarak döndürülecektir. Örneğin; tfin=20; m=5; M=1; l=1; g=9.8; f=0.3;
3 y0=[0,0,0.2,0]; F=0; [tt,yy] = terssarkaccoz(m,m,l,g,f,f,y0,tfin); Bu soruyu farklı parametre değerleri ve başlangıç koşulları için tekrarlayın. Bunları kendiniz seçin ancak birbirinden farklı ve ilginç sonuçlar verecek şeyler seçmeye çalışın. En az 3 farklı durum için sonuçları ve yorumlarınızı raporunuza ekleyin. Soru 1B terssarkacmodel.slx isimli bir Simulink modeli oluşturun ve bir önceki şıkta elde ettiğiniz sonucu doğrulayın. Not: Bu şıkkı yaparken sistemi Simulink altında temel bloklar ile açık biçimde modellemeniz beklenmektedir. User-Defined Functions altındaki bloklar (MATLAB function, Fcn vs.) ve diğer başlıklar altındaki benzer bloklar kullanılmayacaktır. Soru 1C terssarkacpid.slx isimli bir model oluşturun ve önceki şıkta oluşturduğunuz model için değerini bir PID kontrolcü ile kontrol edin. Referans olarak 3 saniyede bir -0.1, 0.1 arasında değişen bir kare dalga kullanın. Kontrolcü sistemi çıkışı en geç 1 saniye içeresinde istenen değere getirmeli ve sistem girişini arasında tutmalıdır. Aşım konusunda herhangi bir kısıt bulunmamaktadır.
4 Modelinizde üç adet Scope bulunmalı ve şunları göstermelidir: 1. Giriş olarak uyguladığınız kuvvet 2. Verilen referansa ile çubuğun açısı arasındaki takip hatası 3. Tüm sistem durumları Kontrolcüyü nasıl tasarladığınızı ve istenilen şartların sağlandığını raporunuzda açıklayın. Farklı referans girişleri (en az 3 farklı referans) için kontrolcünüzü deneyin ve çıktıları yorumlayın. İlgili grafik ve diğer yorumları da raporunuza ekleyin. SORU 2. Genel Bilgiler Şekildeki elektrik devresini ele alalım. Sistemin türevsel denklemleri aşağıdaki gibidir. Sistemin durumları sırasıyla,, şeklindedir. Sistemin girişi, çıkışları da ve şeklindedir. (Bir girişli, iki çıkışlı bir sistem.) SORU 2.A Sistemin durum uzayı gösterimini elde edin ve raporunuza koyun. SORU 2.B Sistem parametrelerini nominal (varsayılan) değerleri şu şekilde olsun:
5 Pratikte modelleme, ölçüm hataları ve zamana bağlı aşınma, yıpranma etkileri sebebiyle gerçek devre parametreleri nominal parametrelerden farklılık gösterebilir. Bunu temsil etmek için rastgelesistem01.m isimli bir fonksiyon yazılacak. Fonksiyon giriş argümanı olarak sırasıyla C1nom (C1'in nominal değeri), C2nom (C2'nin nominal değeri), R1nom (R1'in nominal değeri), R2nom (R2'nin nomimal değeri), Lnom (L'nin nominal değeri) ve yuzde (nominal değerler üzerinde artı eksi en fazla yüzde kaçlık bir değişim olabileceği) isimli parametreler alacaktır. Fonksiyon çağrıldığında gerçek sistem parametrelerini, nominal parametrelerin etrafında istenilen yüzdelik bir değişim içerisinde rastgele belirleyecektir. Örneğin yuzde = 25 ise C1 parametresi aralığından rastgele seçilecektir. Tum parametreler için bu tekrarlanacaktır. Gerçek parametrelerle oluşturulan sistem, durumun uzayı formunda fonksiyonun ilk çıkış argümanı ( G ) içerisinde döndürülecektir. Fonksiyonun ikinci çıkış argümanı ( yuzdeort ) nominal parametreler büyük olarak ortalama ne kadarlık bir değişiklik yapıldığıdır. Büyüklüğe göre bakılacağından bu değer pozitif bir değer olmalıdır. Örneğin olarak seçildiyse olduğundan yuzdeort = 16 döndürülecektir. Fonksiyon rastgele çalıştığında her çağrılışında farklı sistemler vermelidir. Bazı kullanım örneklerine bakalım. Nominal parametreler şöyle olsun C1nom=1; C2nom=2; R1nom=1; R2nom=2; Lnom=1; Parametrelerde en fazla yüzde 10 değişim ile rastgele sistemler oluşturalım: yuzde = 10; [G,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) G = a = x1 x2 x3 x x x
6 b = u1 x1 0 x x c = x1 x2 x3 y y d = u1 y1 0 y2 0 Continuous-time state-space model. yuzdeort = [G,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) G = a = x1 x2 x3 x x x b = u1 x1 0 x x
7 c = x1 x2 x3 y y d = u1 y1 0 y2 0 Continuous-time state-space model. yuzdeort = [G,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) G = a = x1 x2 x3 x x x b = u1 x1 0 x x c = x1 x2 x3 y y d = u1
8 y1 0 y2 0 Continuous-time state-space model. yuzdeort = Bu sefer de parametrelerde yüzde 50'ye kadar değişim ile rastgele sistemler oluşturalım: yuzde = 50; [G,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) G = a = x1 x2 x3 x x x b = u1 x1 0 x x c = x1 x2 x3 y y d = u1 y1 0 y2 0 Continuous-time state-space model.
9 yuzdeort = [G,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) G = a = x1 x2 x3 x x x b = u1 x1 0 x x c = x1 x2 x3 y y d = u1 y1 0 y2 0 Continuous-time state-space model. yuzdeort =
10 [G,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) G = a = x1 x2 x3 x x x b = u1 x1 0 x x c = x1 x2 x3 y y d = u1 y1 0 y2 0 Continuous-time state-space model. yuzdeort = Sistemlerin birim dürtü, birim basamak vb. tepkilerine de bakılabilir. Örneğin son sistemin birim dürtü cevabı impulse(g); set(findobj(gcf,'type','line'),'linewidth',2); % Kalinliklari ayarla
11 Son sistemin birim basamak cevabı step(g); set(findobj(gcf,'type','line'),'linewidth',2); % Kalinliklari ayarla
12 Siz de fonksiyonu yukarıda verilen nominal parametreler için az, orta ve yüksek (%100'e yakın) parametre değişim yüzdeleri ile çağırıp sistemler oluşturun ve bunların birim basamak ve birim rampa cevaplarına bakın. En az 4 tane farklı durum inceleyin. Sistem cevaplarını raporunuza koyun ve yorumlayın. SORU 2.C Sisteme rastgele giriş üretmek üzere rastgelegiris01.m isimli bir fonksiyonu yazın. Fonksiyon giriş argümanı olarak maksimum zaman ( tmax ), maksimum frekans ( fmax ) ve mutlak genlik ( A ) argümanlarını alacaktır. Çıkış olarak [0,tMax] zamanı arasında, fmax'tan daha büyük frekans bileşeni içermeyen (teyit etmek için gözle veya FFT ile bakılabilir), aldığı maksimum değer +A, minimum değer -A olan rastgele bir giriş üreterek bunu u isimli bir çıkış argümanında döndürecektir. İlgili zaman vektörü de t isimli çıkış argümanında döndürülecektir. Fonksiyon rastgele çalıştığından her çağrılışında farklı bir giriş üretmelidir. Bazı örnek kullanımlar: tmax = 30; fmax = 1; gen = 1; [u,t] = rastgelegiris01(tmax,fmax,gen); plot(t,u,'linewidth',2); title('rastgele bir giriş'); xlabel('t (s)'); ylabel('genlik');
13 [u,t] = rastgelegiris01(tmax,fmax,gen); plot(t,u,'linewidth',2); title('rastgele bir giriş'); xlabel('t (s)'); ylabel('genlik');
14 tmax = 20; fmax = 0.5; gen = 2; [u,t] = rastgelegiris01(tmax,fmax,gen); plot(t,u,'linewidth',2); title('rastgele bir giriş'); xlabel('t (s)'); ylabel('genlik');
15 [u,t] = rastgelegiris01(tmax,fmax,gen); plot(t,u,'linewidth',2); title('rastgele bir giriş'); xlabel('t (s)'); ylabel('genlik');
16 [u,t] = rastgelegiris01(tmax,fmax,gen); plot(t,u,'linewidth',2); title('rastgele bir giriş'); xlabel('t (s)'); ylabel('genlik');
17 Siz de bazı örnek değerler için fonksiyonu çağırarak sonuçları çizdirin ve raporunuza koyun. En az 3 farklı sonuç koyun. Sonuçların verilen giriş argümanları ile tutarlı olduğu ile ilgili yorumlarınızı da rapora ekleyin. SORU 2.D Nominal sistem üzerinden rastgele Q ve R matrisleri ile Kalman filtresi oluşturan rastgelefiltre01.m isimli bir fonksiyon yazın. Fonksiyon giriş argümanı olarak nominal sistem ( G ), Q matrisinin büyüklüğünün seçileceği aralığı belirten bir vektör ( qaralik ) ve R matrisinin büyüklüğünün seçileceği aralığı belirten bir vektör ( raralik ) alacaktır. Örneğin qaralik = [1 1000] ve raralik = [1 100] ise arasında bir q sayısı ve arasında bir r sayısı rastgele seçilecek, ardından ve şeklinde Q ve R matrisleri oluşturacaktır. Burada I, uygun boyutlu birim matrisi temsil etmektedir. Bunun ardından G sistemi için bir Kalman filtresi oluşturulacak ve Kest çıkış argümanı olarak döndürülecektir. Fonksiyonu ayrıca q ve r sayılarını da döndürecektir. Bazı örnek kullanımlara bakalım. Önce nominal sistemi oluşturalım: yuzde = 0; [Gnom,yuzdeOrt] = rastgelesistem01(c1nom,c2nom,r1nom,r2nom,lnom,yuzde) Gnom =
18 a = x1 x2 x3 x x x b = u1 x1 0 x2 1 x3 0.5 c = x1 x2 x3 y y d = u1 y1 0 y2 0 Continuous-time state-space model. yuzdeort = 0 Ardından verilen araliklarda q ve r değerlerini rastgele seçerek Kalman filtreleri oluşturalım. qaralik = [1 1000]; raralik = [1 100]; [Kest,q,r] = rastgelefiltre01(gnom,qaralik,raralik) Kest = a = x1_e x2_e x3_e x1_e x2_e
19 x3_e b = u1 y1 y2 x1_e x2_e x3_e c = x1_e x2_e x3_e y1_e y2_e x1_e x2_e x3_e d = u1 y1 y2 y1_e y2_e x1_e x2_e x3_e Input groups: Name Channels KnownInput 1 Measurement 2,3 Output groups: Name Channels OutputEstimate 1,2 StateEstimate 3,4,5 Continuous-time state-space model. q =
20 r = [Kest,q,r] = rastgelefiltre01(gnom,qaralik,raralik) Kest = a = x1_e x2_e x3_e x1_e x2_e x3_e b = u1 y1 y2 x1_e e x2_e x3_e c = x1_e x2_e x3_e y1_e y2_e x1_e x2_e x3_e d = u1 y1 y2 y1_e y2_e x1_e x2_e x3_e Input groups: Name Channels KnownInput 1 Measurement 2,3
21 Output groups: Name Channels OutputEstimate 1,2 StateEstimate 3,4,5 Continuous-time state-space model. q = r = [Kest,q,r] = rastgelefiltre01(gnom,qaralik,raralik) Kest = a = x1_e x2_e x3_e x1_e x2_e x3_e b = u1 y1 y2 x1_e x2_e x3_e c = x1_e x2_e x3_e y1_e y2_e x1_e x2_e 0 1 0
22 x3_e d = u1 y1 y2 y1_e y2_e x1_e x2_e x3_e Input groups: Name Channels KnownInput 1 Measurement 2,3 Output groups: Name Channels OutputEstimate 1,2 StateEstimate 3,4,5 Continuous-time state-space model. q = r = Son oluşturulan filtreyi yukarıda oluşturulan rastgele sistem G ve yine yukarıda oluşturulan rastgele giriş u için deneyelim. Sistemin simülasyonunu yapalım: [y,t,x] = lsim(g,u,t); Giriş ve çıkışa biraz gürültü ekleyelim: u2 = u + 0.2*randn(size(u)); y2 = y + 0.2*randn(size(y));
23 Filtreyi çalıştıralım: [yxhat,that] = lsim(kest,[u2 y2],t); Sonuçları çizdirelim: plot(t,y,'-','linewidth',1); hold on; set(gca, 'ColorOrderIndex', 1); % Renkler aynı olsun plot(t, yxhat(:,1:2),':','linewidth',2.5); hold off; title('gerçek çıkışlar (noktalı) ve tahminler (düz)'); xlabel('t (s)'); ylabel('genlik'); Siz de bazı örnek kullanımlar (en az 4) ile fonksiyonun çalıştığını gösterin. Yukarıdaki örnekte gösterilen çıkış tahminlerine ek olarak durum tahminlerinin de çizdirin. İlgili çizimleri ve yorumları raporunuza ekleyin. SORU 2.E Bu aşamada rastgelesimulasyon01.m isimli bir fonksiyon yazılacaktır. Fonksiyonu önce rastgele Q ve R matrisleri ile Kalman filtresi oluşturacaktır. Sonra bunları parametreleri rastgele seçilen bir sistem üzerinde, rastgele giriş, rastgele giriş gürültüsü ve rastgele çıkış
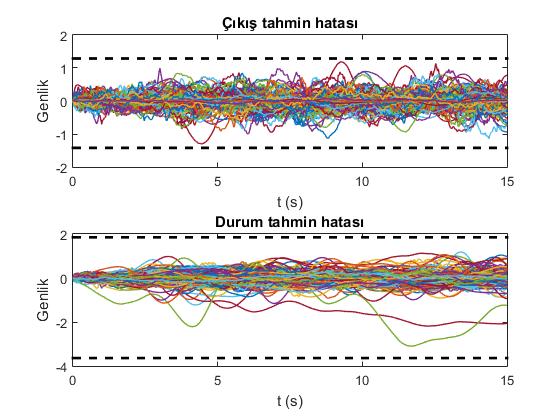
24 gürültüsü altında denemek üzere simülasyonlar yapacaktır. İstenilen sayıda simülasyon yaptıktan sonra en iyi ve en kötü sonuçları belirleyecek, bunları kullanılan parametreler ile birlikte çizdirecektir. Fonksiyonun giriş argümanları sırasıyla şu şekilde olacaktır: C1nom,C2nom,R1nom,R2nom,Lnom : Nominal sistem parametreleri. tmax : Maksimum zaman. fmax : Verilecek rastgele girişler için maksimum frekans içeriği (bant genişliği). genu : Verilecek rastgele girişler için mutlak genlik. Girişin minimum değeri -genu, maksimum değeri +genu olmalı. yuzdeparam : Parametrelerin seçileceği rastgele aralığın nominal değerlerin yüzde kaç etrafında olacağı. yuzdegenu : Rastgele giriş gürültüsünün standart sapmasının giriş gürültüsünün genliğinin yüzde kaçı olacağı. yuzdegeny : Rastgele giriş gürültüsünün standart sapmasının giriş gürültüsünün genliğinin yüzde kaçı olacağı. qaralik : Kalman filtresinin Q matrisinin büyüklüğünün (q) rastgele seçileceği aralık. raralik : Kalman filtresinin R matrisinin büyüklüğünün (r) rastgele seçileceği aralık. nsim : Yapılacak rastgele simülasyon sayısı. Fonksiyon herhangi bir çıkış döndürmeyecektir. Fonksiyonun kendi içinde yapması gerekenler ana hatlarıyla şu şekilde özetlenebilir: 1. Nominal sistemin yuzdeparam komşuluğunda (parametrelerinin nominal değerler rastgele biçimde seçerek) bir sistem oluşturulacak. Bu sistem gerçek sistemi temsil etmektedir. Gerçek hayatta bu sistemin tasarımcı tarafından bilinemeyeceği unutulmamalıdır, yalnızca tasarımları simülasyonda doğrulamak amacıyla oluşturulacaktır. 2. Sisteme verilmek üzere [0, tmax] aralığında fmax bant genişliğinde ve [-genu,+genu] aralığında değer alan rastgele bir giriş sinyali oluşturulacak. Bu sinyalin gerçek sisteme verilmesi ile çıkış sinyali elde edilecek. Bunlara temiz giriş ve temiz çıkış diyelim. 3. Giriş sinyalinin genliğinin yuzde olarak yuzdegenu kadarı büyüklükte standart sapmaya sahip giriş gürültüsü, temiz girişin üzerine binerek gerçek (kirli) girişi oluşturacak. 4. Çıkış sinyalinin genliğinin yuzde olarak yuzdegeny kadarı büyüklükte standart sapmaya sahip çıkış gürültüsü, temiz çıkışın üzerine binerek gerçek (kirli) çıkışı oluşturacak. 5. Kirli giriş ve çıkıştan, temiz çıkış ve durumları tahmin etmeye çalışacak bir Kalman filtresi, ve parametreleri ile oluşturulacak ( birim matris). q ve r, qaralik ve raralik aralıklarından rastgele seçilecek. Not: Kalman filtresinin gerçek sistem parametrelerini bilemeyeceği unutulmamalıdır. 6. Kalman filtresi kullanılarak, kirli giriş ve çıkış altında temiz durumlar ve temiz çıkışın tahmini yapılacak.
25 7. Bu adımlar nsim kere tekrar edilecek. Rastgele işlemler nedeniyle her adımda farklı sonuçlar çıkmalıdır. Fonksiyon ayrıca aşağıdaki grafikleri de çizdirmelidir: Tüm simülasyonların çıkış tahmin hatalarını, yani temiz çıkış ile Kalman filtresinin çıkışla ilgili tahminleri arasındaki farkı zamana karşı çizdiren bir grafik. Hatanın büyüklüğünü değerlendirilebilmesi için yapılan tüm simülasyonlar içinde çıkışın aldığı minimum ve maksimum değerler de kesikli çizgiler ile gösterilecektir. Yukarıdaki maddedeki grafiğin benzeri durumlar için de çizdirilecektir. Üst maddedeki grafik ile aynı şekil üzerinde farklı bir eksende yer alacaktır. Tüm simülasyonlar içerisinde en iyi tahminin yapıldığı senaryo için temiz çıkış ve Kalman filtresi tahminlerini içeren bir şekil. Ayrıca şeklin üstüne bu durum için ortalama parametre değişim yüzdesi, giriş ve çıkış gürültüsü için standart sapma, q ve r değerleri de yazdırılacaktır. Tahminin iyiliği kavramı farklı şekillerde tanımlanabilir, bunun için kriterin ne olabileceğini kendiniz düşünüp, anlamlı bir şey bulup ona göre karar vermelisiniz. Bu kritere göre fonksiyon otomatik olarak en iyi tahmini bulup çizmelidir. Yukarıdaki maddedeki grafiğin benzeri en kötü tahmin yapılan senaryo için de çizdirilecektir. Örnek bazı kullanımlara bakalım. Nominal parametreleri tanımlayalım: C1nom=1; C2nom=2; R1nom=1; R2nom=2; Lnom=1; Maksimum zaman, giriş bant genişliği ve giriş mutlak genliğini tanımlayalım: tmax = 15; fmax = 0.5; gen = 1; Rastgele simülasyonlar için nominal parametrelerden ne kadar farklı seçilebileceği, giriş ve çıkış gürültülerinin yüzde olarak giriş ve çıkış genliklerinin ne kadar büyüklüğünde standart sapmaya sahip olabileceğini tanımlayalım: yuzdeparam = 20; yuzdegenu = 30; yuzdegeny = 40; Kalman filtresinin Q ve R matrislerinin genlikleri q ve r'nin rastegele seçileceği aralıkları tanımlayalım: qaralik = [1 1e4]; raralik = [1 1e4]; Rastgele simülasyon sayısını tanımlayalım:
26 nsim = 100; Fonksiyonu çalıştıralım: rastgelesimulasyon01(c1nom,c2nom,r1nom,r2nom,lnom,tmax,fmax,gen,yuzd eparam,yuzdegenu,yuzdegeny,qaralik,raralik,nsim)
27 Bazı parametreleri değiştirerek çalıştıralım. Mesela daha yüksek parametre değişimi ve daha yüksek giriş, çıkış gürültülerine izin verelim:
28 yuzdeparam = 60; yuzdegenu = 50; yuzdegeny = 55; rastgelesimulasyon01(c1nom,c2nom,r1nom,r2nom,lnom,tmax,fmax,gen,yuzd eparam,yuzdegenu,yuzdegeny,qaralik,raralik,nsim)
29 Parametre değişimini maksimuma yakın (%99) yapalım. R, L, C eksi değerler alamayacağından bu değişim %100'ün altında olmalıdır. Giriş ve çıkış gürültüleri eksi değerler

30 alabilir, o nedenle %100'den fazla sapmaya sahip olmalarında sakınca yok, mesela onları da %200 alalım: yuzdeparam = 99; yuzdegenu = 200; yuzdegeny = 200; rastgelesimulasyon01(c1nom,c2nom,r1nom,r2nom,lnom,tmax,fmax,gen,yuzd eparam,yuzdegenu,yuzdegeny,qaralik,raralik,nsim)
31 Fonksiyonu aynı argümanlarla tekrar çalıştıralım.
32 rastgelesimulasyon01(c1nom,c2nom,r1nom,r2nom,lnom,tmax,fmax,gen,yuzd eparam,yuzdegenu,yuzdegeny,qaralik,raralik,nsim)
33 Simülasyonlarda her şey rastgele olduğu için her seferinde farklı sonuçlar çıktığına dikkat ediniz.
34 Fonksiyonu farklı durumları temsil ve ilginç sonuçlar veren argümanlar için çalıştırın (en az 4 kere yapın). Çıkan sonuçları yorumlayın, özellikle en iyi çalışan durumun neden iyi, en kötü çalışan durumun neden kötü çıktığına dair yorumlarınız önemli. Grafikleri ve yorumları raporunuza ekleyin. Published with MATLAB R2015a
Soru 1. Genel Bilgiler...1 Soru 1A...2 Soru 1B...2 Soru 1D...3 Soru 1C...3 Soru 2. Genel Bilgiler...3 Soru 2A...4
 ELE 515-2016/17 BAHAR DÖNEMİ - ÖDEV 1 Aşağıdaki soruları çözerek en geç 3 Mart 2017 Cuma günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması,
ELE 515-2016/17 BAHAR DÖNEMİ - ÖDEV 1 Aşağıdaki soruları çözerek en geç 3 Mart 2017 Cuma günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması,
ELE /16 BAHAR DÖNEMİ - ÖDEV
 ELE 515-2015/16 BAHAR DÖNEMİ - ÖDEV 1 Aşağıdaki soruları çözerek en geç 17 Şubat 2016 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların
ELE 515-2015/16 BAHAR DÖNEMİ - ÖDEV 1 Aşağıdaki soruları çözerek en geç 17 Şubat 2016 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların
girişli, çıkışlı ve durumlu doğrusal olmayan bir sistemin denklemleri aşağıdaki gibi ifade edilebilir:
 ÖDEV 2 Aşağıdaki soruları çözerek en geç 26 Mart 2014 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen
ÖDEV 2 Aşağıdaki soruları çözerek en geç 26 Mart 2014 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen
Bu soruda eğik şekilde belli bir hızda ve değişik açılarda atılan ve sonrasında yerden seken bir topun hareketini ifade eden kod yazılacaktır.
 ÖDEV 1 Aşağıdaki soruları çözerek en geç 23 Şubat 2014 Pazar günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması, hem de sizlere yol
ÖDEV 1 Aşağıdaki soruları çözerek en geç 23 Şubat 2014 Pazar günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması, hem de sizlere yol
Sensörlerin ölçümlerinde bir miktar hata payı olması. Ölçümlere gürültü karışması.
 Contents Kalman filtresi uygulamaları Kalman filtresinin temelleri DC motor modeli üzerinde Kalman filtresi Kalman filtresi için tümleşik sistem oluşturma Kalman filtresi için parametre seçimi Kalman filtresini
Contents Kalman filtresi uygulamaları Kalman filtresinin temelleri DC motor modeli üzerinde Kalman filtresi Kalman filtresi için tümleşik sistem oluşturma Kalman filtresi için parametre seçimi Kalman filtresini
BÖLÜM 1.A Bir sisteme belli frekanslar arasında rastgele bir gürültü karıştığını varsayalım. Örneğin
 ÖDEV 2 Aşağıdaki soruları çözerek en geç 8 Mart 2016 Salı günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen aşağıdaki
ÖDEV 2 Aşağıdaki soruları çözerek en geç 8 Mart 2016 Salı günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen aşağıdaki
Bu uygulama saatinde, dinamik sistemlerin simülasyonu (benzetimi) için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır.
 için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır.") Bu uygulama saatinde, dinamik sistemlerin simülasyonu (benzetimi) için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır. Simulink bir Grafik Kullanıcı Arayüzü (Graphical User
Bu uygulama saatinde, dinamik sistemlerin simülasyonu (benzetimi) için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır. Simulink bir Grafik Kullanıcı Arayüzü (Graphical User
Matlab da 2-boyutlu Grafik Çizimi. Arş. Gör. Mehmet Ali ÜSTÜNER
 Matlab da 2-boyutlu Grafik Çizimi Arş Gör Mehmet Ali ÜSTÜNER Manisa, 03122017 Arş Gör Mehmet Ali ÜSTÜNER 2 Dikdörtgen (x-y) Ve Kutupsal Eksenlerde Çizgi Grafikleri: En basit çizim, iki değişkeni olan çizimlerdir
Matlab da 2-boyutlu Grafik Çizimi Arş Gör Mehmet Ali ÜSTÜNER Manisa, 03122017 Arş Gör Mehmet Ali ÜSTÜNER 2 Dikdörtgen (x-y) Ve Kutupsal Eksenlerde Çizgi Grafikleri: En basit çizim, iki değişkeni olan çizimlerdir
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4B: DC MOTOR TRANSFER FONKSİYONU VE PARAMETRELERİNİN ELDE EDİLMESİ
 Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
DENEY 25 HARMONİK DİSTORSİYON VE FOURIER ANALİZİ Amaçlar :
 DENEY 5 HARMONİK DİSTORSİYON VE FOURIER ANALİZİ Amaçlar : Doğrusal olmayan (nonlineer) devre elemanlarının nasıl harmonik distorsiyonlara yol açtığını göstermek. Bir yükselteç devresinde toplam harmoniklerin
DENEY 5 HARMONİK DİSTORSİYON VE FOURIER ANALİZİ Amaçlar : Doğrusal olmayan (nonlineer) devre elemanlarının nasıl harmonik distorsiyonlara yol açtığını göstermek. Bir yükselteç devresinde toplam harmoniklerin
Contents. Doğrusal sistemler için kontrol tasarım yaklaşımları
 Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ MİKRODALGA TEKNİĞİ I DERSİ DÖNEM PROJESİ
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ MİKRODALGA TEKNİĞİ I DERSİ DÖNEM PROJESİ Yrd. Doç.Dr. Mehmet Fatih ÇAĞLAR Arş. Gör. Mahmut Ahmet GÖZEL Bahar
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ MİKRODALGA TEKNİĞİ I DERSİ DÖNEM PROJESİ Yrd. Doç.Dr. Mehmet Fatih ÇAĞLAR Arş. Gör. Mahmut Ahmet GÖZEL Bahar
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 3: ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ *
 KONTROL ELEMANLARININ İNCELENMESİ *") Deneyden sonra bir hafta içerisinde raporunuzu teslim ediniz. Geç teslim edilen raporlar değerlendirmeye alınmaz. ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 3: ORANSAL, TÜREVSEL VE İNTEGRAL (PID)
Deneyden sonra bir hafta içerisinde raporunuzu teslim ediniz. Geç teslim edilen raporlar değerlendirmeye alınmaz. ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 3: ORANSAL, TÜREVSEL VE İNTEGRAL (PID)
ELM 331 ELEKTRONİK II LABORATUAR DENEY FÖYÜ
 ELM 33 ELEKTRONİK II LABORATUAR DENEY ÖYÜ DENEY 2 Ortak Emitörlü Transistörlü Kuvvetlendiricinin rekans Cevabı. AMAÇ Bu deneyin amacı, ortak emitörlü (Common Emitter: CE) kuvvetlendiricinin tasarımını,
ELM 33 ELEKTRONİK II LABORATUAR DENEY ÖYÜ DENEY 2 Ortak Emitörlü Transistörlü Kuvvetlendiricinin rekans Cevabı. AMAÇ Bu deneyin amacı, ortak emitörlü (Common Emitter: CE) kuvvetlendiricinin tasarımını,
EHM381 ANALOG HABERLEŞME DÖNEM PROJESİ
 T.C. SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektronik ve Haberleşme Mühendisliği Bölümü EHM381 ANALOG HABERLEŞME DÖNEM PROJESİ MATLAB YARDIMIYLA ANALOG MODÜLASYONLU SİNYALLERİN ÜRETİLMESİ
T.C. SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektronik ve Haberleşme Mühendisliği Bölümü EHM381 ANALOG HABERLEŞME DÖNEM PROJESİ MATLAB YARDIMIYLA ANALOG MODÜLASYONLU SİNYALLERİN ÜRETİLMESİ
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Kinematik Modeller. Kesikli Hale Getirilmiş Sürekli Zaman Kinematik Modeller: Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder.
 1 Kinematik durum modelleri konumun belirli bir türevi sıfıra eşitlenerek elde edilir. Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder. Böyle modeller polinom modeller olarak ta bilinir
1 Kinematik durum modelleri konumun belirli bir türevi sıfıra eşitlenerek elde edilir. Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder. Böyle modeller polinom modeller olarak ta bilinir
1. LİNEER PCM KODLAMA
 1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
DENEY 2A: MOTOR ve TAKOJENERATÖR ÖZELLİKLERİ *
 ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 2A: MOTOR ve TAKOJENERATÖR ÖZELLİKLERİ * 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı Osiloskop 2. KAVRAM Motor ve takojeneratör
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 2A: MOTOR ve TAKOJENERATÖR ÖZELLİKLERİ * 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı Osiloskop 2. KAVRAM Motor ve takojeneratör
ELKE 405 Otomatik Kontrol Sistemleri
 ELK 304 Kontrol Sistemlerine Giriş Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü ELKE 405 Otomatik Kontrol Sistemleri Prof. Dr. İsmail H. ALTAŞ Son Teslim
ELK 304 Kontrol Sistemlerine Giriş Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü ELKE 405 Otomatik Kontrol Sistemleri Prof. Dr. İsmail H. ALTAŞ Son Teslim
ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU
 T.C. MARMARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU Mehmet SUCU (Teknik Öğretmen, BSc.)
T.C. MARMARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU Mehmet SUCU (Teknik Öğretmen, BSc.)
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU. Deney No: 3 PID KONTROLÜ
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2
 KONTROL ELEMANLARININ İNCELENMESİ 2") ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı
6. DENEY Alternatif Akım Kaynağı ve Osiloskop Cihazlarının Kullanımı
 6. DENEY Alternatif Akım Kaynağı ve Osiloskop Cihazlarının Kullanımı Deneyin Amacı: Osiloskop kullanarak alternatif gerilimlerin incelenmesi Deney Malzemeleri: Osiloskop Alternatif Akım Kaynağı Uyarı:
6. DENEY Alternatif Akım Kaynağı ve Osiloskop Cihazlarının Kullanımı Deneyin Amacı: Osiloskop kullanarak alternatif gerilimlerin incelenmesi Deney Malzemeleri: Osiloskop Alternatif Akım Kaynağı Uyarı:
MATLAB İLE PROGRAMLAMAYA GİRİŞ. Nedim TUTKUN Elektrik Elektronik Mühendisliği Bölümü
 MATLAB İLE PROGRAMLAMAYA GİRİŞ Nedim TUTKUN Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@gmail.com 1 5. Hafta Ders İçeriği Çizgi ve Yüzey Grafik Çizimleri plot Komutu plot (x,y) iki boyutlu grafik
MATLAB İLE PROGRAMLAMAYA GİRİŞ Nedim TUTKUN Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@gmail.com 1 5. Hafta Ders İçeriği Çizgi ve Yüzey Grafik Çizimleri plot Komutu plot (x,y) iki boyutlu grafik
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Algoritmalar ve Programlama. DERS - 4 Yrd. Doç. Dr. Ahmet SERBES
 Algoritmalar ve Programlama DERS - 4 Yrd. Doç. Dr. Ahmet SERBES Geçen Derste Değişken oluşturma Skaler Diziler, vektörler Matrisler Aritmetik işlemler Bazı fonksiyonların kullanımı Operatörler İlk değer
Algoritmalar ve Programlama DERS - 4 Yrd. Doç. Dr. Ahmet SERBES Geçen Derste Değişken oluşturma Skaler Diziler, vektörler Matrisler Aritmetik işlemler Bazı fonksiyonların kullanımı Operatörler İlk değer
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
SAYISAL KONTROL 2 PROJESİ
 SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
ALÇAK FREKANS GÜÇ YÜKSELTEÇLERİ VE ÇIKIŞ KATLARI
 ALÇAK FREKANS GÜÇ YÜKSELTEÇLERİ VE ÇIKIŞ KATLARI Deneyin Amacı: Alçak frekans güç yükselteçleri ve çıkış katlarının incelenip, çalışma mantıklarının kavranması Kullanılacak Materyaller: BD135 (npn Transistör)
ALÇAK FREKANS GÜÇ YÜKSELTEÇLERİ VE ÇIKIŞ KATLARI Deneyin Amacı: Alçak frekans güç yükselteçleri ve çıkış katlarının incelenip, çalışma mantıklarının kavranması Kullanılacak Materyaller: BD135 (npn Transistör)
KMU MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ELETRONİK LABORATUVARI DENEY 1 OSİLOSKOP KULLANIMI
 KMU MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ELETRONİK LABORATUVARI DENEY 1 OSİLOSKOP KULLANIMI DENEY 1 OSİLOSKOP KULLANIMI Deneyin Amaçları Osiloskop kullanımını öğrenmek, Osiloskop grafiklerini
KMU MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ELETRONİK LABORATUVARI DENEY 1 OSİLOSKOP KULLANIMI DENEY 1 OSİLOSKOP KULLANIMI Deneyin Amaçları Osiloskop kullanımını öğrenmek, Osiloskop grafiklerini
DENEY 5: FREKANS CEVABI VE BODE GRAFİĞİ
 DENEY 5: FREKANS CEVABI VE BODE GRAFİĞİ 1 AMAÇ Bu deneyin temel amacı; bant geçiren ve alçak geçiren seri RLC filtrelerin cevabını incelemektir. Ayrıca frekans cevabı deneyi neticesinde elde edilen verileri
DENEY 5: FREKANS CEVABI VE BODE GRAFİĞİ 1 AMAÇ Bu deneyin temel amacı; bant geçiren ve alçak geçiren seri RLC filtrelerin cevabını incelemektir. Ayrıca frekans cevabı deneyi neticesinde elde edilen verileri
Şekil 1. Geri beslemeli yükselteçlerin genel yapısı
 DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
Elemanter fonksiyonlarla yaklaşım ve hata
 Elemanter fonksiyonlarla yaklaşım ve hata Prof. Dr. Erhan Coşkun Karadeniz Teknik Üniversitesi, Fen Fakültesi Matematik Bölümü Kasım, 2018 e 5 Kasım, 2018 1 / 48 Elemanter fonksiyonlarla yaklaşım ve hata
Elemanter fonksiyonlarla yaklaşım ve hata Prof. Dr. Erhan Coşkun Karadeniz Teknik Üniversitesi, Fen Fakültesi Matematik Bölümü Kasım, 2018 e 5 Kasım, 2018 1 / 48 Elemanter fonksiyonlarla yaklaşım ve hata
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
MATLAB'dan doğrusal sistemlerin matematiksel modellemesi için transfer fonksiyonu, sıfırkutup-kazanç, durum uzayı vs. gösterimler kullanılabilir.
 Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
ADC Devrelerinde Pratik Düşünceler
 ADC Devrelerinde Pratik Düşünceler ADC nin belki de en önemli örneği çözünürlüğüdür. Çözünürlük dönüştürücü tarafından elde edilen ikili bitlerin sayısıdır. Çünkü ADC devreleri birçok kesikli adımdan birinin
ADC Devrelerinde Pratik Düşünceler ADC nin belki de en önemli örneği çözünürlüğüdür. Çözünürlük dönüştürücü tarafından elde edilen ikili bitlerin sayısıdır. Çünkü ADC devreleri birçok kesikli adımdan birinin
T.C. MARMARA ÜNĠVERSĠTESĠ TEKNĠK EĞĠTĠM FAKÜLTESĠ ELEKTRONĠK-BĠLGĠSAYAR EĞĠTĠMĠ BÖLÜMÜ VE ELEKTRĠK EĞĠTĠMĠ BÖLÜMÜ
 T.C. MARMARA ÜNĠVERSĠTESĠ TEKNĠK EĞĠTĠM FAKÜLTESĠ ELEKTRONĠK-BĠLGĠSAYAR EĞĠTĠMĠ BÖLÜMÜ VE ELEKTRĠK EĞĠTĠMĠ BÖLÜMÜ OTOMATĠK KONTROL DERSĠ LABORATUAR DENEYLERĠ DENEY ALIġTIRMA SORULARI (v.1010031044.otokontrol.foy.sorular)
T.C. MARMARA ÜNĠVERSĠTESĠ TEKNĠK EĞĠTĠM FAKÜLTESĠ ELEKTRONĠK-BĠLGĠSAYAR EĞĠTĠMĠ BÖLÜMÜ VE ELEKTRĠK EĞĠTĠMĠ BÖLÜMÜ OTOMATĠK KONTROL DERSĠ LABORATUAR DENEYLERĠ DENEY ALIġTIRMA SORULARI (v.1010031044.otokontrol.foy.sorular)
ALTERNATĐF AKIM (AC) I AC NĐN ELDE EDĐLMESĐ; KARE VE ÜÇGEN DALGALAR
 I AC NĐN ELDE EDĐLMESĐ; KARE VE ÜÇGEN DALGALAR") ALTERNATĐF AKIM (AC) I AC NĐN ELDE EDĐLMESĐ; KARE VE ÜÇGEN DALGALAR 1.1 Amaçlar AC nin Elde Edilmesi: Farklı ve değişken DC gerilimlerin anahtar ve potansiyometreler kullanılarak elde edilmesi. Kare dalga
ALTERNATĐF AKIM (AC) I AC NĐN ELDE EDĐLMESĐ; KARE VE ÜÇGEN DALGALAR 1.1 Amaçlar AC nin Elde Edilmesi: Farklı ve değişken DC gerilimlerin anahtar ve potansiyometreler kullanılarak elde edilmesi. Kare dalga
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ İLETİŞİM LABORATUARI SAYISAL FİLTRELER
 SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
Sayısal Modülasyon Deneyi
 Sayısal Modülasyon Deneyi Darbe Şekillendirme, Senkronizasyon ve ISI (BPSK, QPSK(4-QAM) Modülasyonları ) Sinyaller gerçek hayatta izin verilen bir band içinde yer alacak şekilde iletilmek zorundadır. Sinyalin
Sayısal Modülasyon Deneyi Darbe Şekillendirme, Senkronizasyon ve ISI (BPSK, QPSK(4-QAM) Modülasyonları ) Sinyaller gerçek hayatta izin verilen bir band içinde yer alacak şekilde iletilmek zorundadır. Sinyalin
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL)
") AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL) Ayrık-zamanda çalışırken sinyaller bütün zamanlar için değil, sadece belli zaman anları için tanımlıdır. Bu zaman anları arasındaki aralığa Ts diyelim. Örneğin
AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL) Ayrık-zamanda çalışırken sinyaller bütün zamanlar için değil, sadece belli zaman anları için tanımlıdır. Bu zaman anları arasındaki aralığa Ts diyelim. Örneğin
AKIŞKANLAR MEKANİĞİ-II
 AKIŞKANLAR MEKANİĞİ-II Şekil 1. Akışa bırakılan parçacıkların parçacık izlemeli hızölçer ile belirlenmiş cisim arkasındaki (iz bölgesi) yörüngeleri ve hızlarının zamana göre değişimi (renk skalası). Akış
AKIŞKANLAR MEKANİĞİ-II Şekil 1. Akışa bırakılan parçacıkların parçacık izlemeli hızölçer ile belirlenmiş cisim arkasındaki (iz bölgesi) yörüngeleri ve hızlarının zamana göre değişimi (renk skalası). Akış
Stokastik Süreçler. Bir stokastik süreç ya da rastgele süreç şöyle tanımlanabilir.
 Bir stokastik süreç ya da rastgele süreç şöyle tanımlanabilir. Zamanla değişen bir rastgele değişkendir. Rastgele değişkenin alacağı değer zamanla değişmektedir. Deney çıktılarına atanan rastgele bir zaman
Bir stokastik süreç ya da rastgele süreç şöyle tanımlanabilir. Zamanla değişen bir rastgele değişkendir. Rastgele değişkenin alacağı değer zamanla değişmektedir. Deney çıktılarına atanan rastgele bir zaman
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
Deney 21 PID Denetleyici (I)
") Deney 21 PID Denetleyici (I) DENEYİN AMACI 1. Ziegler ve Nichols ayarlama kuralı I i kullanarak PID enetleyici parametrelerini belirlemek. 2. PID enetleyici parametrelerinin ince ayarını yapmak. GENEL
Deney 21 PID Denetleyici (I) DENEYİN AMACI 1. Ziegler ve Nichols ayarlama kuralı I i kullanarak PID enetleyici parametrelerini belirlemek. 2. PID enetleyici parametrelerinin ince ayarını yapmak. GENEL
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI. Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
T.C. YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ESM 413 ENERJİ SİSTEMLERİ LABORATUVARI I
 T.C. YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ESM 413 ENERJİ SİSTEMLERİ LABORATUVARI I DENEY 6: DİYOT KARAKTERİSTİKLERİ VE AC-DC DOĞRULTUCU UYGULAMALARI Ad Soyad
T.C. YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ESM 413 ENERJİ SİSTEMLERİ LABORATUVARI I DENEY 6: DİYOT KARAKTERİSTİKLERİ VE AC-DC DOĞRULTUCU UYGULAMALARI Ad Soyad
DENEY 9- DOĞRU AKIM DA RC DEVRE ANALİZİ
 9.1. DENEYİN AMAÇLARI DENEY 9- DOĞRU AKIM DA RC DEVRE ANALİZİ RC devresinde kondansatörün şarj ve deşarj eğrilerini elde etmek Zaman sabiti kavramını öğrenmek Seri RC devresinin geçici cevaplarını incelemek
9.1. DENEYİN AMAÇLARI DENEY 9- DOĞRU AKIM DA RC DEVRE ANALİZİ RC devresinde kondansatörün şarj ve deşarj eğrilerini elde etmek Zaman sabiti kavramını öğrenmek Seri RC devresinin geçici cevaplarını incelemek
Makine Elemanları I. Toleranslar. Prof. Dr. İrfan KAYMAZ. Erzurum Teknik Üniversitesi. Mühendislik Fakültesi Makine Mühendisliği Bölümü
 Makine Elemanları I Prof. Dr. İrfan KAYMAZ Mühendislik Fakültesi Makine Mühendisliği Bölümü İçerik Toleransın tanımı Boyut Toleransı Geçme durumları Tolerans hesabı Yüzey pürüzlülüğü Örnekler Tolerans
Makine Elemanları I Prof. Dr. İrfan KAYMAZ Mühendislik Fakültesi Makine Mühendisliği Bölümü İçerik Toleransın tanımı Boyut Toleransı Geçme durumları Tolerans hesabı Yüzey pürüzlülüğü Örnekler Tolerans
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ
 KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ Amaç: Bu deneyde terslemeyen kuvvetlendirici, toplayıcı kuvvetlendirici ve karşılaştırıcı
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ Amaç: Bu deneyde terslemeyen kuvvetlendirici, toplayıcı kuvvetlendirici ve karşılaştırıcı
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
DENEY FÖYÜ 4: Alternatif Akım ve Osiloskop
 Deneyin Amacı: DENEY FÖYÜ 4: Alternatif Akım ve Osiloskop Osiloskop kullanarak alternatif gerilimlerin incelenmesi Deney Malzemeleri: 5 Adet 1kΩ, 5 adet 10kΩ, 5 Adet 2k2Ω, 1 Adet potansiyometre(1kω), 4
Deneyin Amacı: DENEY FÖYÜ 4: Alternatif Akım ve Osiloskop Osiloskop kullanarak alternatif gerilimlerin incelenmesi Deney Malzemeleri: 5 Adet 1kΩ, 5 adet 10kΩ, 5 Adet 2k2Ω, 1 Adet potansiyometre(1kω), 4
Internet Programming II. Elbistan Meslek Yüksek Okulu 2014 2015 Bahar Yarıyılı
 Internet Programming II Elbistan Meslek Yüksek Okulu 2014 2015 Bahar Yarıyılı Öğr. Gör. Murat KEÇECĠOĞLU 11-14 May. 2014 Form Form İşlemleri Tarayıcıdan bilgi alarak işlem gerçekleştirme FORM elemanları
Internet Programming II Elbistan Meslek Yüksek Okulu 2014 2015 Bahar Yarıyılı Öğr. Gör. Murat KEÇECĠOĞLU 11-14 May. 2014 Form Form İşlemleri Tarayıcıdan bilgi alarak işlem gerçekleştirme FORM elemanları
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
DENEY 2 Sistem Benzetimi
 DENEY Sistem Benzetimi DENEYİN AMACI. Diferansiyel denklem kullanarak, fiziksel bir sistemin nasıl tanımlanacağını öğrenmek.. Fiziksel sistemlerin karakteristiklerini anlamak amacıyla diferansiyel denklem
DENEY Sistem Benzetimi DENEYİN AMACI. Diferansiyel denklem kullanarak, fiziksel bir sistemin nasıl tanımlanacağını öğrenmek.. Fiziksel sistemlerin karakteristiklerini anlamak amacıyla diferansiyel denklem
SÜREKLĠ OLASILIK DAĞILIMLARI
 SÜREKLĠ OLASILIK DAĞILIMLARI Sayı ekseni üzerindeki tüm noktalarda değer alabilen değişkenler, sürekli değişkenler olarak tanımlanmaktadır. Bu bölümde, sürekli değişkenlere uygun olasılık dağılımları üzerinde
SÜREKLĠ OLASILIK DAĞILIMLARI Sayı ekseni üzerindeki tüm noktalarda değer alabilen değişkenler, sürekli değişkenler olarak tanımlanmaktadır. Bu bölümde, sürekli değişkenlere uygun olasılık dağılımları üzerinde
Elektriksel-Fiziksel Özellikler... 2 Kullanım... 3 Uygulama Örnekleri... 7
 FONKSİYON ÜRETECİ KULLANIM KILAVUZU (FUNCTION GENERATOR) İçindekiler Elektriksel-Fiziksel Özellikler... 2 Kullanım... 3 Uygulama Örnekleri... 7 Şekil Listesi Şekil 1 Fonksiyon üreteci... 2 Şekil 2 Fonksiyon
FONKSİYON ÜRETECİ KULLANIM KILAVUZU (FUNCTION GENERATOR) İçindekiler Elektriksel-Fiziksel Özellikler... 2 Kullanım... 3 Uygulama Örnekleri... 7 Şekil Listesi Şekil 1 Fonksiyon üreteci... 2 Şekil 2 Fonksiyon
GEBZE TEKNİK ÜNİVERSİTESİ
 GEBZE TEKNİK ÜNİVERSİTESİ ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELM222 DEVRE TEORİSİ II LABORATUVARI DENEY 3: SERİ VE PARALEL EMPEDANSLAR Öğrencinin Numarası : Adı Soyadı : Deney Arkadaşının Numarası : Adı Soyadı
GEBZE TEKNİK ÜNİVERSİTESİ ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELM222 DEVRE TEORİSİ II LABORATUVARI DENEY 3: SERİ VE PARALEL EMPEDANSLAR Öğrencinin Numarası : Adı Soyadı : Deney Arkadaşının Numarası : Adı Soyadı
ELEKTRİK TESİSLERİNDE HARMONİKLERİN PASİF FİLTRE KULLANILARAK AZALTILMASI VE SİMÜLASYONU. Sabir RÜSTEMLİ
 ELEKTRİK TESİSLERİNDE HARMONİKLERİN PASİF FİLTRE KULLANILARAK AZALTILMASI VE SİMÜLASYONU Sabir RÜSTEMLİ Elektrik tesislerinin güvenli ve arzu edilir bir biçimde çalışması için, tesisin tasarım ve işletim
ELEKTRİK TESİSLERİNDE HARMONİKLERİN PASİF FİLTRE KULLANILARAK AZALTILMASI VE SİMÜLASYONU Sabir RÜSTEMLİ Elektrik tesislerinin güvenli ve arzu edilir bir biçimde çalışması için, tesisin tasarım ve işletim
BM202 SAYISAL ÇÖZÜMLEME
 BM202 SAYISAL ÇÖZÜMLEME DOÇ.DR. CİHAN KARAKUZU DERS-2 1 Ders2-Sayısal Hesaplamalarda Gerek Duyulabilecek Matlab İşlemleri MATLAB, çok paradigmalı (bir şeyin nasıl üretileceği konusunda örnek, model) sayısal
BM202 SAYISAL ÇÖZÜMLEME DOÇ.DR. CİHAN KARAKUZU DERS-2 1 Ders2-Sayısal Hesaplamalarda Gerek Duyulabilecek Matlab İşlemleri MATLAB, çok paradigmalı (bir şeyin nasıl üretileceği konusunda örnek, model) sayısal
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ DİYOT KARAKTERİSTİKLERİ DENEYİ
 KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ DİYOT KARAKTERİSTİKLERİ DENEYİ Amaç: Bu deney, diyotların gerilim-akım eğrisinin elde edilmesi, diyotların temel kullanım
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ DİYOT KARAKTERİSTİKLERİ DENEYİ Amaç: Bu deney, diyotların gerilim-akım eğrisinin elde edilmesi, diyotların temel kullanım
FİZ209A OPTİK LABORATUVARI DENEY KILAVUZU
 T.C. GAZİ ÜNİVERSİTESİ GAZİ EĞİTİM FAKÜLTESİ ORTAÖĞRETİM FEN VE MATEMATİK ALANLARI EĞİTİMİ BÖLÜMÜ FİZİK EĞİTİMİ ANABİLİM DALI FİZ209A OPTİK LABORATUVARI DENEY KILAVUZU TÇ 2007 & ҰǓ 2012 Öğrencinin Adı
T.C. GAZİ ÜNİVERSİTESİ GAZİ EĞİTİM FAKÜLTESİ ORTAÖĞRETİM FEN VE MATEMATİK ALANLARI EĞİTİMİ BÖLÜMÜ FİZİK EĞİTİMİ ANABİLİM DALI FİZ209A OPTİK LABORATUVARI DENEY KILAVUZU TÇ 2007 & ҰǓ 2012 Öğrencinin Adı
DOĞRULTUCULAR VE REGÜLATÖRLER
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Elektronik Anabilim Dalı Elektronik I Dersi Laboratuvarı DOĞRULTUCULAR VE REGÜLATÖRLER 1. Deneyin Amacı Yarım
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Elektronik Anabilim Dalı Elektronik I Dersi Laboratuvarı DOĞRULTUCULAR VE REGÜLATÖRLER 1. Deneyin Amacı Yarım
TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü. Basit Harmonik Hareket Deneyi Deney Föyü. Edirne
 TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü Basit Harmonik Hareket Deneyi Deney Föyü Edirne 2016 İçindekiler: 1.Deney Hakkında Teorik Bilgi 1 1.a) Yaylar ve Mekanik Özellikleri
TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü Basit Harmonik Hareket Deneyi Deney Föyü Edirne 2016 İçindekiler: 1.Deney Hakkında Teorik Bilgi 1 1.a) Yaylar ve Mekanik Özellikleri
4. Sunum: AC Kalıcı Durum Analizi. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
DENEY 6 BASİT SARKAÇ
 DENEY 6 BASİT SARKAÇ AMAÇ: Bir basit sarkacın temel fiziksel özelliklerinin incelenmesi. TEORİ: Basit sarkaç şekilde görüldüğü gibi kütlesiz bir ip ve ucuna asılı noktasal bir kütleden ibarettir. Şekil
DENEY 6 BASİT SARKAÇ AMAÇ: Bir basit sarkacın temel fiziksel özelliklerinin incelenmesi. TEORİ: Basit sarkaç şekilde görüldüğü gibi kütlesiz bir ip ve ucuna asılı noktasal bir kütleden ibarettir. Şekil
RF MİKROELEKTRONİK GÜRÜLTÜ
 RF MİKROELEKTRONİK GÜRÜLTÜ RASTGELE BİR SİNYAL Gürültü rastgele bir sinyal olduğu için herhangi bir zamandaki değerini tahmin etmek imkansızdır. Bu sebeple tekrarlayan sinyallerde de kullandığımız ortalama
RF MİKROELEKTRONİK GÜRÜLTÜ RASTGELE BİR SİNYAL Gürültü rastgele bir sinyal olduğu için herhangi bir zamandaki değerini tahmin etmek imkansızdır. Bu sebeple tekrarlayan sinyallerde de kullandığımız ortalama
= 2 6 Türevsel denkleminin 1) denge değerlerinin bulunuz. 2) Bulmuş olduğunuz dengenin istikrarlı olup olmadığını tespit ediniz.
 denge değerlerinin bulunuz. 2) Bulmuş olduğunuz dengenin istikrarlı olup olmadığını tespit ediniz.") Siyasal Bilgiler Fakültesi İktisat Bölümü Matematiksel İktisat Ders Notu Prof. Dr. Hasan Şahin Faz Diyagramı Çizimi Açıklamarı = 2 6 Türevsel denkleminin 1) denge değerlerinin bulunuz. 2) Bulmuş olduğunuz
Siyasal Bilgiler Fakültesi İktisat Bölümü Matematiksel İktisat Ders Notu Prof. Dr. Hasan Şahin Faz Diyagramı Çizimi Açıklamarı = 2 6 Türevsel denkleminin 1) denge değerlerinin bulunuz. 2) Bulmuş olduğunuz
Space Cowboy (Android Studio da 2 boyutlu mobil oyun yazılımı eğitimi )
") Space Cowboy (Android Studio da 2 boyutlu mobil oyun yazılımı eğitimi ) İçindekiler: 1- Gereken kurulumlar, GitHub dan oyunun framework unun indirilmesi (NgdroidApp), update/draw metodunun çalıştırılarak
Space Cowboy (Android Studio da 2 boyutlu mobil oyun yazılımı eğitimi ) İçindekiler: 1- Gereken kurulumlar, GitHub dan oyunun framework unun indirilmesi (NgdroidApp), update/draw metodunun çalıştırılarak
DENEY 3 ATWOOD MAKİNASI
 DENEY 3 ATWOOD MAKİNASI AMAÇ Bu deney bir cismin hareketi ve hareketi doğuran sebepler arasındaki ilişkiyi inceler. Bu deneyde eğik hava masası üzerine kurulmuş Atwood makinesini kullanarak Newton un ikinci
DENEY 3 ATWOOD MAKİNASI AMAÇ Bu deney bir cismin hareketi ve hareketi doğuran sebepler arasındaki ilişkiyi inceler. Bu deneyde eğik hava masası üzerine kurulmuş Atwood makinesini kullanarak Newton un ikinci
Musa DEMİRCİ. KTO Karatay Üniversitesi. Konya - 2015
 Musa DEMİRCİ KTO Karatay Üniversitesi Konya - 2015 1/46 ANA HATLAR Temel Kavramlar Titreşim Çalışmalarının Önemi Otomatik Taşıma Sistemi Model İyileştirme Süreci Modal Analiz Deneysel Modal Analiz Sayısal
Musa DEMİRCİ KTO Karatay Üniversitesi Konya - 2015 1/46 ANA HATLAR Temel Kavramlar Titreşim Çalışmalarının Önemi Otomatik Taşıma Sistemi Model İyileştirme Süreci Modal Analiz Deneysel Modal Analiz Sayısal
İletişim Ağları Communication Networks
 İletişim Ağları Communication Networks Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, Behrouz A. Forouzan, Data Communications and Networking 4/E, McGraw-Hill,
İletişim Ağları Communication Networks Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, Behrouz A. Forouzan, Data Communications and Networking 4/E, McGraw-Hill,
Ders 5 : MATLAB ile Grafik Uygulamaları
 Ders 5 : MATLAB ile Grafik Uygulamaları Kapsam Polinomlar Enterpolasyon Grafikler 5.1. Polinomlar 5.1.1. Polinom Girişi Matlab de polinomlar katsayılarının vektörü ile tanımlanır. Örnek: P(x) = -6x 5 +4x
Ders 5 : MATLAB ile Grafik Uygulamaları Kapsam Polinomlar Enterpolasyon Grafikler 5.1. Polinomlar 5.1.1. Polinom Girişi Matlab de polinomlar katsayılarının vektörü ile tanımlanır. Örnek: P(x) = -6x 5 +4x
Otomatik Sıcaklık Kontrolü Otomatik Sıcaklık Kontrolü
 Otomatik Sıcaklık Kontrolü Otomatik Sıcaklık Kontrolü Bir çok pratik sistemde sıcaklığın belli bir değerde sabit tutulması gerekir. Oda sıcaklığı kontrolü, kimyasal reaksiyonlar ve standart ürün alınması
Otomatik Sıcaklık Kontrolü Otomatik Sıcaklık Kontrolü Bir çok pratik sistemde sıcaklığın belli bir değerde sabit tutulması gerekir. Oda sıcaklığı kontrolü, kimyasal reaksiyonlar ve standart ürün alınması
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ
 DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
ELE 311 ANALOG ELEKTRONİK DEVRELER FİNAL PROJE
 ELE 311 ANALOG ELEKTRONİK DEVRELER FİNAL PROJE Rapor Teslim ve PCB Demo Tarihi: 24 Nisan 2016 Saat 17:30 Asgari Tasarım Gereksinimleri Yüksek Eşik Frekansı: en az 20 khz DüşükEşik Frekansı: en fazla 10
ELE 311 ANALOG ELEKTRONİK DEVRELER FİNAL PROJE Rapor Teslim ve PCB Demo Tarihi: 24 Nisan 2016 Saat 17:30 Asgari Tasarım Gereksinimleri Yüksek Eşik Frekansı: en az 20 khz DüşükEşik Frekansı: en fazla 10
Şekil 1.1 Genliği kuvantalanmamış sürekli zamanlı işaret. İşaretin genliği sürekli değerler alır. Buna analog işaret de denir.
 İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
Kırım Filtresi ve Alt Örnekleme
 Kırım Filtresi ve Alt Örnekleme Örneklenmiş bir sinyalin örnek azaltma işleminde M değerleri arttıkça spektral örtüşme kaçınılmaz hale gelmektedir, bu spektral örtüşmeden kaynaklı veri kaybını yok edemeyiz
Kırım Filtresi ve Alt Örnekleme Örneklenmiş bir sinyalin örnek azaltma işleminde M değerleri arttıkça spektral örtüşme kaçınılmaz hale gelmektedir, bu spektral örtüşmeden kaynaklı veri kaybını yok edemeyiz
CAEeda TM OM6 KANADI MODELLEME. EDA Tasarım Analiz Mühendislik
 CAEeda TM OM6 KANADI MODELLEME EDA Tasarım Analiz Mühendislik 1. Kapsam Kanat Sınırlarını Çizme Taban Kanat Profilinin Hücum ve Firar Kenarları Sınırlarını Çizme Kanat Profilini Dosyadan (.txt) Okuma Geometrik
CAEeda TM OM6 KANADI MODELLEME EDA Tasarım Analiz Mühendislik 1. Kapsam Kanat Sınırlarını Çizme Taban Kanat Profilinin Hücum ve Firar Kenarları Sınırlarını Çizme Kanat Profilini Dosyadan (.txt) Okuma Geometrik
DENEY NO:2 BJT Yükselticinin Darbe Cevabı lineer kuvvetlendirme Yükselme Süresi Gecikme Çınlama Darbe üst eğilmesi
 DENEY NO:2 BJT Yükselticinin Darbe Cevabı Yükselticini girişine uygulanan işaretin şeklini bozmadan yapılan kuvvetlendirmeye lineer kuvvetlendirme denir. Başka bir deyişle lineer darbe kuvvetlendirmesi,
DENEY NO:2 BJT Yükselticinin Darbe Cevabı Yükselticini girişine uygulanan işaretin şeklini bozmadan yapılan kuvvetlendirmeye lineer kuvvetlendirme denir. Başka bir deyişle lineer darbe kuvvetlendirmesi,
MAKİNE ELEMANLARI DERS SLAYTLARI
 MAKİNE ELEMANLARI DERS SLAYTLARI TOLERANSLAR P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L I H O Ğ LU Tolerans Gereksinimi? Tasarım ve üretim
MAKİNE ELEMANLARI DERS SLAYTLARI TOLERANSLAR P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L I H O Ğ LU Tolerans Gereksinimi? Tasarım ve üretim
5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri
 Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
PSPICE AC SWEEP VE PARAMETRĐK ANALĐZ YÖNTEMLERĐ
 PSPICE AC SWEEP VE PARAMETRĐK ANALĐZ YÖNTEMLERĐ AC SWEEP ANALĐZĐ Bu AC analiz yöntemi ile; devrenin frekans cevabı çıkarılabilir, kaynak geriliminin, devredeki herhangi bir elemanın akımının, geriliminin,
PSPICE AC SWEEP VE PARAMETRĐK ANALĐZ YÖNTEMLERĐ AC SWEEP ANALĐZĐ Bu AC analiz yöntemi ile; devrenin frekans cevabı çıkarılabilir, kaynak geriliminin, devredeki herhangi bir elemanın akımının, geriliminin,
T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK LABORATUVARI-II DENEY RAPORU
 T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK LABORATUVARI-II DENEY RAPORU İŞLEMSEL KUVVETLENDİRİCİLER ADI SOYADI: ÖĞRENCİ NO: GRUBU: Deneyin
T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK LABORATUVARI-II DENEY RAPORU İŞLEMSEL KUVVETLENDİRİCİLER ADI SOYADI: ÖĞRENCİ NO: GRUBU: Deneyin
Örnek...4 : İlk iki sınavında 75 ve 82 alan bir öğrencinin bu dersin ortalamasını 5 yapabilmek için son sınavdan kaç alması gerekmektedir?
 İSTATİSTİK Bir sonuç çıkarmak ya da çözüme ulaşabilmek için gözlem, deney, araştırma gibi yöntemlerle toplanan bilgiye veri adı verilir. Örnek...4 : İlk iki sınavında 75 ve 82 alan bir öğrencinin bu dersin
İSTATİSTİK Bir sonuç çıkarmak ya da çözüme ulaşabilmek için gözlem, deney, araştırma gibi yöntemlerle toplanan bilgiye veri adı verilir. Örnek...4 : İlk iki sınavında 75 ve 82 alan bir öğrencinin bu dersin
DENEY FÖYÜ 7: Seri ve Paralel Rezonans Devreleri
 DENEY FÖYÜ 7: Seri ve Paralel Rezonans Devreleri Deneyin Amacı: Seri ve paralel rezonans devrelerini incelemek, devrelerin karakteristik parametrelerini hesaplamak ve ölçmek, rezonans eğrilerini çizmek.
DENEY FÖYÜ 7: Seri ve Paralel Rezonans Devreleri Deneyin Amacı: Seri ve paralel rezonans devrelerini incelemek, devrelerin karakteristik parametrelerini hesaplamak ve ölçmek, rezonans eğrilerini çizmek.