Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
|
|
|
- Ceren Seyfi
- 6 yıl önce
- İzleme sayısı:
Transkript
1 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş
2 Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
3 16 Rijit Cismin Düzlemsel Kinematiği Bu bölümde, düzlemsel kinematik veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme dişli ve kam gibi makine elemanlarında kullanılan mekanizmaların tasarımı için önemlidir. Bir rijit cisim öteleme, sabit bir eksen etrafında dönme ve genel düzlemsel hareket olmak üzere üç tip düzlemsek hareket yapabilir. Rijit cismin düzlemsel hareketi, cisim üzerindeki iki noktanın hareketi bilindiğinde tamamen belirlenebilir.
4 16.1 Rijit Cisim Hareketi Rijit cismin bütün parçacıkları sabit bir düzlemden eşit uzaklıktaki yörüngeler boyunca hareket ediyorsa, cisim düzlemsel hareket yapıyor denir. Üç tür düzlemsel hareket vardır: 1. Öteleme 2. Sabit bir eksen etrafında dönme 3. Genel düzlemsel hareket

5 16.1 Rijit Cisim Hareketi 1. Öteleme. Cisim üzerindeki herhangi bir çizgi elemanı hareket esnasında başlangıçtaki doğrultusuna paralel kalırsa oluşur. Herhangi iki parçacığın hareket yörüngesi eşit uzaklıklı doğrular ise harekete doğrusal öteleme, eşit uzaklıklı eğriler ise eğrisel öteleme denir. Doğrusal öteleme yörüngesi Eğrisel öteleme yörüngesi

6 16.1 Rijit Cisim Hareketi 2. Sabit bir eksen etrafında dönme. Dönme ekseni üzerinde bulunanlar dışında, cismin bütün parçacıkları dairesel yörüngeler boyunca hareket eder. Sabit bir eksen etrafında dönme

7 16.1 Rijit Cisim Hareketi 3. Genel düzlemsel hareket. Cismin hareketi, öteleme ve dönme hareketlerinin bileşimidir. Öteleme referans düzlemi içinde, dönme ise referans sistemine dik bir eksen etrafında gerçekleşir. Genel düzlemsel hareket

8 16.1 Rijit Cisim Hareketi Krank mekanizmasının hareketli parçaları, düzlemsel hareketlere örnek oluşturmaktadır. Genel düzlemsel hareket Eğrisel öteleme Doğrusal öteleme Sabit bir eksen etrafında dönme

9 16.1 Rijit Cisim Hareketi Bir eğrisel öteleme örneği. Araç dairesel bir yörüngede hareket etmesine rağmen hareket boyunca yatay düzleme paralel kalır.
10 16.2 Öteleme x-y düzleminde doğrusal veya eğrisel öteleme hareketi yapan bir rijit cismi ele alalım. Sabit koordinat sistemi Ötelenen koordinat sistemi Konum. A ve B noktalarının konumları, sabit x-y referans sisteminde r A ve r B konum vektörleri ile tanımlanır. Ötelenen x -y koordinat sistemi cisimde sabittir ve orijini taban noktası A da bulunmaktadır.
11 16.2 Öteleme x-y düzleminde doğrusal veya eğrisel öteleme hareketi yapan bir rijit cismi ele alalım. Hız. Konum denkleminin zamana göre türevi alınarak hızlar belirlenir. Ötelenen koordinat sistemi Sabit koordinat sistemi

12 16.2 Öteleme x-y düzleminde doğrusal veya eğrisel öteleme hareketi yapan bir rijit cismi ele alalım. Ötelenen koordinat sistemi İvme. Hız denkleminin zamana göre türevi alınarak A ve B nin anlık ivmeleri arasındaki bağıntı elde edilir. Sabit koordinat sistemi Eğrisel veya doğrusal öteleme yapan bir rijit cismin bütün noktaları aynı hız ve ivme ile hareket eder.
13 16.3 Sabit Bir Eksen Etrafında Dönme Bir cisim sabit bir eksen etrafında döndüğünde, cismin herhangi bir P noktası dairesel bir yol boyunca hareket eder. Bu hareket, cismin eksen etrafındaki açısal hareketine bağlıdır. Bu nedenle, öncelikle cismin açısal hareketinin özellikleri incelenecektir. Açısal Hareket. Nokta boyutsuz olduğu için sadece çizgiler ve cisimler açısal hareket yapar.
14 16.3 Sabit Bir Eksen Etrafında Dönme Açısal Konum. r nin açısal konumu, sabit bir referans ekseni ve r ekseni arasındaki θ açısıyla tanımlanır. Burada r, dönme eksenine dik doğrultudadır. Açısal Yer Değiştirme. Genellikle dθ ile ölçülen açısal konumdaki değişmeye açısal yer değiştirme denir. dθ nın yönü sağ el kuralı ile belirlenir.
15 16.3 Sabit Bir Eksen Etrafında Dönme Açısal Hız. Açısal konumun zamana göre değişim oranına denir, ω (omega) ile gösterilir. Bu vektörün büyüklüğü genellikle rad/s ile ölçülür.
16 16.3 Sabit Bir Eksen Etrafında Dönme Açısal İvme. Açısal hızın zamana göre değişim oranına denir, α (alfa) ile gösterilir.



17 16.3 Sabit Bir Eksen Etrafında Dönme Sabit Açısal İvme. α = α c ise, doğrusal harekettekine benzer olan, cismin açısal hızını, açısal konumunu ve zamanı birbirine bağlayan bir denklem takımı elde edilir. Sabit açısal ivme


18 16.3 Sabit Bir Eksen Etrafında Dönme P Noktasının Hareketi. P noktası O merkezli, r yarıçaplı bir dairesel yörüngede hareket eder. Konum. P nin konumu, O dan P ye uzanan r konum vektörü ile tanımlanır. Hız. ds nin zamana göre türevi ile belirenebilir.


19 16.3 Sabit Bir Eksen Etrafında Dönme İvme. İvme, normal ve teğetsel bileşenler cinsinden ifade edilecektir.

20 16.3 Sabit Bir Eksen Etrafında Dönme Bir vinçte kullanılan dişlilerin hepsi sabit eksenler etrafında döner. Mühendisler, dişli sistemini tasarlayabilmek için bunların açısal hareketleri arasındaki ilişkiyi belirlemelidir.
21 Örnek 16-1 Başlangıçta hareketsiz duran tekerlek etrafında bir ip sarılıdır. İpe, a = (4t) m/s 2 ivmesi veren bir kuvvet uygulandığına göre, (a) tekerleğin açısal hızını, (b) OP çizgisinin radyan cinsinden ölçülen açısal konumunu zamanın fonksiyonu olarak belirleyiniz.
")
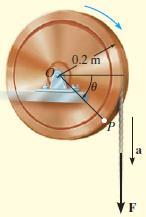
22 Örnek 16-1 (a) (b)
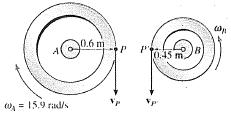
23 Örnek 16-2 A diski durağan halden başlayarak bir motor vasıtası ile α A = 2 rad/s 2 lik sabit bir açısal ivme ile döndürülüyor. Diskler arasında herhangi bir kayma olmadığına göre, A diski 10 devir yaptıktan hemen sonra B diskinin açısal hız ve açısal ivmesini belirleyiniz.

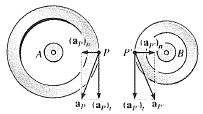
24 Örnek 16-2
25 16.4 Mutlak Genel Düzlemsel Hareket Analizi Genel düzlemsel hareket yapan bir cisim, aynı anda hem öteleme hem dönme hareketi yapar. Bu hareketi tanımlamanın bir yolu, yörüngesi boyunca bir noktanın konumunu belirlemek için s konum koordinatını ve çizginin yönelimini belirlemek için θ açısal konum koordinatlarını kullanmaktır. Daha sonra, problemin geometrisi kullanılarak bu koordinatlar arasında bağıntı kurulur. Zaman değişkenli v=ds/dt, a=dv/dt, ω=dθ/dt ve α=dω/dt nin uygulanması ile, noktanın hareketi ve çizginin açısal hareketi arasında bağıntı kurulabilir.

26 16.4 Mutlak Genel Düzlemsel Hareket Analizi Araç üzerindeki kova, A noktasından geçen sabit bir eksen etrafında dönmektedir. Hareket BC silindirinin uzaması ile sağlanmaktadır. Kovanın açısal konumu θ ile, C noktasının konumu s konum koordinatı ile belirlenebilir. a ve b uzunlukları sabit olduğundan, s ve θ arasında kosinüs kuralı yazılabilir: Bu denklemin zamana göre türevi, silindirin uzama hızı ile kovanın açısal hızını birbirine bağlar.
27 Örnek 16-3 R çubuğunun ucu bir yay vasıtasıyla kamla temasını sürdürmektedir. Kam, bir α açısal ivmesi ve ω açısal hızı ile O noktasından geçen bir eksen etrafında döndüğüne göre, kam keyfi bir θ konumunda iken, çubuğun hız ve ivmesini hesaplayınız.

28 Örnek 16-3 Konum-Koordinat Denklemi. Zamana Göre Türevler.
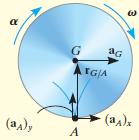
29 Örnek 16-4 r yarıçaplı silindir, verilen bir anda, ω açısal hızına ve α açısal ivmesine sahiptir. Silindir, kaymadan yuvarlandığına göre, G merkezinin hız ve ivmesini belirleyiniz.
30 Örnek 16-4 Konum-Koordinat Denklemi. Zamana Göre Türevler.
31 Örnek 16-5 Geniş bir pencere AB hidrolik silindiri kullanılarak açılmaktadır. Silindir, 0.5 m/s lik bir sabit hızla uzadığına göre, θ=30 olduğu anda pencerenin açısal hız ve açısal ivmesini belirleyiniz.

32 Örnek 16-5 Konum-Koordinat Denklemi. Zamana Göre Türevler.
33 16.5 Bağıl Hareket Analizi: Hız Rijit cismin genel düzlemsel hareketinin öteleme ve dönmenin bileşiminden oluştuğunu biliyoruz. Çoğu kez, bu hareketin bileşenlerini ayrı incelemek daha uygun olur. Bunun için iki eksen takımı ile bağıl hareket analizi yapılır. A ve B noktalarının mutlak konum, hız ve ivmeleri x-y referans sisteminden ölçülür. x'-y' sisteminin orijini, hareketi bilinen bir A taban noktasına yerleştirilir. x'-y' eksenleri x-y ye göre ötelenir ama cisimle birlikte dönme hareketi yapmaz. Sabit referans sistemi Ötelenen referans sistemi
34 16.5 Bağıl Hareket Analizi: Hız Konum. Yer Değiştirme. Ötelenen referans sistemi Sabit referans sistemi Genel düzlemsel hareket Öteleme Dönme
35 16.5 Bağıl Hareket Analizi: Hız Hız. Yer değiştirme denklemi dt ile bölünerek hız ifadesi elde edilebilir: v A ve v B, sabit x-y eksenlerinden ölçülür ve A ve B noktalarındaki mutlak hızları gösterir.
36 16.5 Bağıl Hareket Analizi: Hız Hız. A nın yörüngesi B nin yörüngesi Genel düzlemsel hareket Öteleme A taban noktası etrafında dönme


37 16.5 Bağıl Hareket Analizi: Hız Hız. Bu denklemler, mafsallı veya diğer rijit cisimlerle temas eden cisimlerin düzlemsel hareketini incelemek için kullanılabilir. A ve B noktaları genellikle mafsal noktaları veya hareketi bilinen noktalar olarak seçilmelidir.
38 Örnek 16-6 Şekildeki bağlantı, sabit oluklarda hareket eden A ve B deki iki blok tarafından hareket ettirilmektedir. A nın hızı aşağı doğru 2 m/s olduğuna göre, θ=45 olduğu anda B nin hızını belirleyiniz.
.")
39 Örnek 16-6 Çözüm (Vektörel Analiz).
40 Örnek 16-7 m 2 m/s Şekildeki silindir, 2 m/s hızla hareket eden bir taşıyıcı bandın üzerinde, kaymaksızın serbestçe yuvarlanmaktadır. Silindir, gösterilen anda ω=15 rad/s lik saat yönlü bir açısal hıza sahip olduğuna göre, A noktasının hızını belirleyiniz.
.")
41 Örnek 16-7 Çözüm (Vektörel Analiz). m 2 m/s m/s m/s m/s 2 m/s
42 Örnek 16-7 Çözüm (Skaler Analiz). m m m/s 2 m/s m/s m/s m/s m/s m
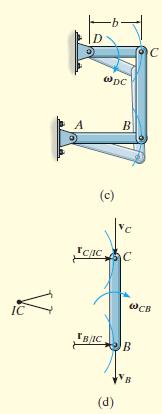
43 Örnek 16-8 Şekildeki C bileziği, 2 m/s hızla aşağı doğru hareket etmektedir. CB nin bu andaki açısal hızını belirleyiniz.


44 Örnek 16-8 Çözüm (Vektörel Analiz).
.")
45 Örnek 16-8 Çözüm (Skaler Analiz).

46 Örnek 16-9 AB çubuğu θ=60 olduğu anda 30 rad/s lik açısal hıza sahiptir. BC kolunun ve tekerleğin bu andaki açısal hızlarını belirleyiniz.

.")

47 Örnek 16-9 Çözüm (Vektörel Analiz). AB bağlantısı için: BC bağlantısı için: Tekerlek için:
 denir.")
48 16.6 Sıfır Hızlı Anlık Merkez Rijit cisim üzerindeki bir B noktasının hızı, A taban noktası verilen anda sıfır hıza sahip olan bir nokta olarak seçilirse, basit şekilde elde edilebilir. Genel düzlemsel hareket yapan bir cisimde bu A noktasına anlık dönme merkezi (DM) denir. Bu nokta, sıfır hızlı anlık eksen üzerinde yer alır.

49 16.6 Sıfır Hızlı Anlık Merkez DM nin Konumu. Konumu, DM den herhangi bir noktaya giden bağıl konum vektörünün daima bu noktanın hızına dik olduğu gerçeği kullanılarak belirlenebilir. Değişik olasılıklar vardır: Taban eğrisi 1. Cisim üzerindeki bir noktanın hızının ve cismin açısal hızının verilmesi durumu. DM

50 16.6 Sıfır Hızlı Anlık Merkez DM nin Konumu. 2. Paralel olmayan iki hızın etki çizgilerinin verilmesi durumu. Hızların etki çizgilerinden v A ve v B ye dik doğru parçalarının kesişme noktası DM yi verir.


51 16.6 Sıfır Hızlı Anlık Merkez DM nin Konumu. 3. İki paralel hızın büyüklük ve doğrultusunun verilmesi durumu. v A ve v B nin hızlarının bilinmesi durumunda, DM nin konumu, benzer üçgenlerden belirlenebilir.

52 Örnek Üst şekildeki BC krank mili ve alt şekildeki CB bağlantısı için, sıfır hızlı anlık dönme merkezinin nasıl belirleneceğini gösteriniz.

53 Örnek 16-10
54 Örnek Şekildeki D bloğu 3 m/s hızla hareket etmektedir. Gösterilen anda BD ve AB bağlantılarının açısal hızlarını ve B noktasının hızını belirleyiniz.

55 Örnek 16-11
56 Örnek Şekildeki silindir, E ve D hareketli plakaları arasında kaymadan yuvarlanmaktadır. Gösterilen anda silindirin açısal hızını ve merkezinin hızını belirleyiniz.

57 Örnek 16-12
58 16.7 Bağıl Hareket Analizi: İvme Genel düzlemsel hareket yapan bir rijit cisim üzerindeki iki noktanın ivmeleri, hız denkleminin zamana göre türevi alınarak belirlenebilir. A nın yörüngesi = + Genel düzlemsel hareket B nin yörüngesi Öteleme A taban noktası etrafında dönme
59 16.7 Bağıl Hareket Analizi: İvme
60 16.7 Bağıl Hareket Analizi: İvme
61 16.7 Bağıl Hareket Analizi: İvme B nin yörüngesi B nin izlediği yol hareket yörüngesi ile aynı olduğundan, mafsalla çakışan noktalar aynı ivmeye sahiptir.


62 16.7 Bağıl Hareket Analizi: İvme Temas noktalarının ivmelerinin teğetsel bileşenleri aynı olup normal bileşenleri birbirinden farklıdır.

63 16.7 Bağıl Hareket Analizi: İvme Şekilde bir pencere mekanizması görülmektedir. CA parçası C noktasından geçen bir eksen etrafında dönmektedir. AB ise genel düzlemsel hareket yapmaktadır. A noktası eğrisel bir yörünge izlediğinden ivmesinin iki bileşeni vardır. B noktası ise düz bir rayda hareket etmektedir ve ivmesinin doğrultusu belirlenmiştir.
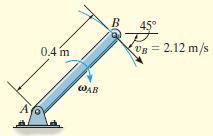
64 Örnek AB çubuğu, A ve B deki eğik düzlemler boyunca hareket edebilmektedir. A noktası, çubuk yatay konumda bulunduğu anda her ikisi de aşağı doğru yönlenmiş 3 m/s 2 lik bir ivmeye ve 2 m/s lik bir hıza sahip olduğuna göre, çubuğun bu andaki açısal ivmesini belirleyiniz.
.")
65 Örnek Çözüm (Vektörel Analiz). Çözüm (Skaler Bileşenler).
66 Örnek r yarıçaplı silindir, verilen bir anda ω açısal hızı ve α açısal ivmesine sahiptir. Silindir kaymadan yuvarlandığına göre, G merkezinin hız ve ivmesi ile A temas noktasının ivmesini belirleyiniz.

67 Örnek 16-14
68 Örnek Makara gösterilen anda 3 rad/s lik bir açısal hıza ve 4 rad/s 2 lik bir açısal ivmeye sahip olacak şekilde ipten çözülmektedir. B noktasının ivmesini belirleyiniz.
69 Örnek Çözüm (Vektörel Analiz).

70 Örnek Çözüm (Skaler Bileşenler).

71 Örnek C bileziği 1 m/s 2 lik bir ivmeyle aşağı doğru hareket etmektedir. Gösterilen anda CB ve AB nin açısal ivmelerini belirleyiniz.

72 Örnek 16-17

73 Örnek m m AB krank mili 20 rad/s 2 lik bir açısal ivmeyle saat yönünde dönmektedir. Gösterilen konumda pistonun ivmesini belirleyiniz.

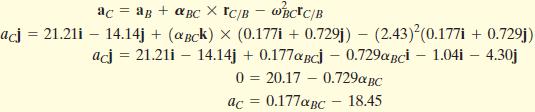
74 Örnek m m m m m/s 2 m m m/s 2
75 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Bazı rijit cisimler, bağlantılarda kayma olacak şekilde bir araya getirilmişlerdir. Bu durumda en iyi kinematik analiz, hem ötelenen hem dönen bir koordinat sistemi kullanılmasını gerektirir. Bu referans sistemi ayrıca, bir düzenekte aynı rijit cisim üzerinde bulunmayan iki noktanın hareketinin analizinde ve parçacığın dönen bir yörünge boyunca hareket etmesi halinde kinematiğini belirlemede kullanılabilir.
76 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Konum. A taban noktası, X, Y, Z sabit koordinat sistemine göre hem ötelenen hem dönen x, y, z koordinat sisteminin orijinini gösterir. Burada, bağıl konum vektörünün hareketli referans sistemine göre ölçüldüğü kabul edilecektir.
77 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Hız. İlk parantezdeki terimler (v B/A ) xyz, B noktasının hareketli sistemden ölçülen hız bileşenlerini verir. İkinci parantezdeki birim vektörlerin değişim hızı sabit sistemden ölçülür.
78 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Hız. di ve dj, dθ anlık dönmesinden ortaya çıkar.
79 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Hız.
80 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Hız.
81 16.8 Dönen Eksenlerde Bağıl Hareket Analizi Hız.
82 16.8 Dönen Eksenlerde Bağıl Hareket Analizi İvme. İlk parantezdeki terimler B noktasının hareketli sisteme göre ölçülen ivmesini gösterir (a B/A ) xyz.
83 16.8 Dönen Eksenlerde Bağıl Hareket Analizi İvme. İkinci parantezdeki terimler aşağıdaki gibi basitleştirilebilir:
84 16.8 Dönen Eksenlerde Bağıl Hareket Analizi İvme.
85 16.8 Dönen Eksenlerde Bağıl Hareket Analizi İvme. 2Ωx(v B/A ) xyz terimine Coriolis ivmesi denir. B nin dönmeyen ve dönen eksenlerden ölçülen ivmeleri arasındaki farkı gösterir. Roketler, uzun menzilli mermiler ve dünyanın dönmesinden fazla etkilenen hareketler yapan cisimler üzerine etkiyen ivme ve kuvvetler incelenirken ortaya çıkar.
86 16.8 Dönen Eksenlerde Bağıl Hareket Analizi İvme.
87 Örnek Verilen anda Coriolis ivmesi ile bileziğin hız ve ivmesini belirleyiniz.
88 Örnek Hareketli sistemin hareketi C nin hareketli sisteme göre hareketi



89 Örnek Hareketli sistemin hareketi C nin hareketli sisteme göre hareketi
90 Örnek Verilen anda DE çubuğunun hareketini belirleyiniz. C deki bilezik AB ye mafsallanmıştır ve DE çubuğu üzerinde kaymaktadır.

91 Örnek Hareketli sistemin hareketi C nin hareketli sisteme göre hareketi

92 Örnek 16-19
93 Örnek Uçaklar aynı yükseklikte uçmaktadır. A uçağının B nin pilotu tarafından ölçülen hız ve ivmesini belirleyiniz.

94 Örnek 16-20

95 Örnek 16-20
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
RÖLATİF HAREKET ANALİZİ: İVME
 RÖLATİF HAREKET ANALİZİ: İVME AMAÇLAR: 1. Rijit bir cisim üzerindeki noktanın ivmesini ötelenme ve dönme birleşenlerine ayırmak, 2. Rijit cisim üzerindeki bir noktanın ivmesini rölatif ivme analizi ile
RÖLATİF HAREKET ANALİZİ: İVME AMAÇLAR: 1. Rijit bir cisim üzerindeki noktanın ivmesini ötelenme ve dönme birleşenlerine ayırmak, 2. Rijit cisim üzerindeki bir noktanın ivmesini rölatif ivme analizi ile
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
DİNAMİK MEKANİK. Şekil Değiştiren Cisimler Mekaniği. Mukavemet Elastisite Teorisi Sonlu Elemanlar Analizi PARÇACIĞIN KİNEMATİĞİ
 DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KATI CİSMİN DÜZLEMSEL KİNETİĞİ
 KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 12 Parçacık Kinematiği
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 12 Parçacık Kinematiği
FIZ Uygulama Vektörler
 Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017
 Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017") SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Düzgün olmayan dairesel hareket
 Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
DİNAMİK Ders_3. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
DİNAMİK - 6. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 6. HAFTA Kapsam: Bağımlı hareket, Analiz prosedürü, Örnek problem
DİNAMİK - 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 6. HAFTA Kapsam: Bağımlı hareket, Analiz prosedürü, Örnek problem
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
EĞRİSEL HAREKET : Silindirik Bileşenler
 EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
KKKKK VERİLER. Yer çekimi ivmesi : g=10 m/s 2. Metrik Ön Takılar sin 45 = cos 45 = 0,7
 VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 6 Yapısal Analiz Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 6. Yapısal Analiz Şekilde görüldüğü
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 6 Yapısal Analiz Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 6. Yapısal Analiz Şekilde görüldüğü
Fizik-1 UYGULAMA-7. Katı bir cismin sabit bir eksen etrafında dönmesi
 Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
1 Rijit Cisimlerin Düzlemsel Kinematiği
 Şekil 1: Şekil 2: Katı (rijid) cismin düzlemsel hareket tipleri 1 Rijit Cisimlerin Düzlemsel Kinematiği 1.1 Giriş Dersin 2. bölümünde noktasal cismin kinematik bağıntılarını elde etmiştik. Aynı bağıntıları
Şekil 1: Şekil 2: Katı (rijid) cismin düzlemsel hareket tipleri 1 Rijit Cisimlerin Düzlemsel Kinematiği 1.1 Giriş Dersin 2. bölümünde noktasal cismin kinematik bağıntılarını elde etmiştik. Aynı bağıntıları
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DENEY 5 DÖNME HAREKETİ
 DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
ELK-301 ELEKTRİK MAKİNALARI-1
 ELK-301 ELEKTRİK MAKİNALARI-1 KAYNAKLAR 1. Prof. Dr. Güngör BAL, Elektrik Makinaları I, Seçkin Yayınevi, Ankara 2016 2. Stephen J. Chapman, Elektrik Makinalarının Temelleri, Çağlayan Kitabevi, 2007, Çeviren:
ELK-301 ELEKTRİK MAKİNALARI-1 KAYNAKLAR 1. Prof. Dr. Güngör BAL, Elektrik Makinaları I, Seçkin Yayınevi, Ankara 2016 2. Stephen J. Chapman, Elektrik Makinalarının Temelleri, Çağlayan Kitabevi, 2007, Çeviren:
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Fizik 101-Fizik I 2013-2014. Katı Bir Cismin Sabit Bir Eksen Etrafında Dönmesi
 -Fizik I 2013-2014 Katı Bir Cismin Sabit Bir Eksen Etrafında Dönmesi Nurdan Demirci Sankır Ofis: 325, Tel: 2924332 İçerik Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği Açısal ve Doğrusal Nicelikler
-Fizik I 2013-2014 Katı Bir Cismin Sabit Bir Eksen Etrafında Dönmesi Nurdan Demirci Sankır Ofis: 325, Tel: 2924332 İçerik Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği Açısal ve Doğrusal Nicelikler
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU
 RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ KÜTLE ATALET MOMENTİ Bugünün Hedefleri: 1. Rijit bir cismin
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ KÜTLE ATALET MOMENTİ Bugünün Hedefleri: 1. Rijit bir cismin
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Fizik 101: Ders 17 Ajanda
 izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
KKKKK. Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I
 Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I 1. Sınav süresi 10 dakikadır.. Bu sınavda eşit puanlı 0 adet soru vardır.. Elinizdeki soru kitapçığı K türü soru kitapçığıdır.. Yanıtlarınızı Yanıt Kağıdı
Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I 1. Sınav süresi 10 dakikadır.. Bu sınavda eşit puanlı 0 adet soru vardır.. Elinizdeki soru kitapçığı K türü soru kitapçığıdır.. Yanıtlarınızı Yanıt Kağıdı
Fizik 101: Ders 18 Ajanda
 Fizik 101: Ders 18 Ajanda Özet Çoklu parçacıkların dinamiği Makara örneği Yuvarlanma ve kayma örneği Verilen bir eksen etrafında dönme: hokey topu Eğik düzlemde aşağı yuvarlanma Bowling topu: kayan ve
Fizik 101: Ders 18 Ajanda Özet Çoklu parçacıkların dinamiği Makara örneği Yuvarlanma ve kayma örneği Verilen bir eksen etrafında dönme: hokey topu Eğik düzlemde aşağı yuvarlanma Bowling topu: kayan ve
HAREKET HAREKET KUVVET İLİŞKİSİ
 HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
DİNAMİK - 2. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu. Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
TEMEL MEKANİK 5. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1
 İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1") DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
TEKNOLOJİNİN BİLİMSEL İLKELERİ
 TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
TORK VE DENGE 01 Torkun Tanımı ve Yönü
 TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
MÜHENDİSLİK MEKANİĞİ (STATİK)
") MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
STATIK MUKAVEMET. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta)
") MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Maden Mühendisliği Bölümü MDM 240 Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No:
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Maden Mühendisliği Bölümü MDM 240 Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No:
TORK VE DENGE. İçindekiler TORK VE DENGE 01 TORK VE DENGE 02 TORK VE DENGE 03 TORK VE DENGE 04. Torkun Tanımı ve Yönü
 İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
4.1 denklemine yakından bakalım. Tanımdan α = dω/dt olduğu bilinmektedir (ω açısal hız). O hâlde eğer cisme etki eden tork sıfır ise;
. O hâlde eğer cisme etki eden tork sıfır ise;") Deney No : M3 Deneyin Adı : EYLEMSİZLİK MOMENTİ VE AÇISAL İVMELENME Deneyin Amacı : Dönme hareketinde eylemsizlik momentinin ne demek olduğunu ve nelere bağlı olduğunu deneysel olarak gözlemlemek. Teorik
Deney No : M3 Deneyin Adı : EYLEMSİZLİK MOMENTİ VE AÇISAL İVMELENME Deneyin Amacı : Dönme hareketinde eylemsizlik momentinin ne demek olduğunu ve nelere bağlı olduğunu deneysel olarak gözlemlemek. Teorik
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü
 Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Akışkan Statiğine Giriş Akışkan statiği (hidrostatik, aerostatik), durgun haldeki akışkanlarla
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Akışkan Statiğine Giriş Akışkan statiği (hidrostatik, aerostatik), durgun haldeki akışkanlarla
r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s
![r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s](/thumbs/55/37178256.jpg "r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s") Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
MIM 210 DİNAMİK DERSİ DERS NOTU
 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği:
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği:
DENEY 1. İncelenmesi. Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi
 DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
MOMENT. Momentin büyüklüğü, uygulanan kuvvet ile, kuvvetin sabit nokta ya da eksene olan dik uzaklığının çarpımına eşittir.
 MOMENT İki noktası ya da en az bir noktası sabit olan cisimlere uygulanan kuvvet cisme sabit bir nokta veya eksen etrafında dönme hareketi yaptırır. Kapı ve pencereleri açıp kapanması, musluğu açıp kapatmak,
MOMENT İki noktası ya da en az bir noktası sabit olan cisimlere uygulanan kuvvet cisme sabit bir nokta veya eksen etrafında dönme hareketi yaptırır. Kapı ve pencereleri açıp kapanması, musluğu açıp kapatmak,
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
Doç.Dr. Cesim ATAŞ MEKANİK ŞEKİL DEĞİŞTİREN CİSİMLER MEKANİĞİ DİNAMİK
 STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
ATALET MOMENTİ. Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması.
 ATALET MOMENTİ Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması. UYGULAMALAR Şekilde gösterilen çark büyük bir kesiciye bağlıdır. Çarkın kütlesi, kesici bıçağa
ATALET MOMENTİ Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması. UYGULAMALAR Şekilde gösterilen çark büyük bir kesiciye bağlıdır. Çarkın kütlesi, kesici bıçağa
HARRAN ÜNİVERSİTESİ 2016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ
 HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
Hareket Kanunları. Newton un Hareket Kanunları. Fiz 1011 Ders 5. Eylemsizlik - Newton un I. Yasası. Temel - Newton un II. Yasası
 Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu