BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
|
|
|
- Turgay Gökçe
- 9 yıl önce
- İzleme sayısı:
Transkript
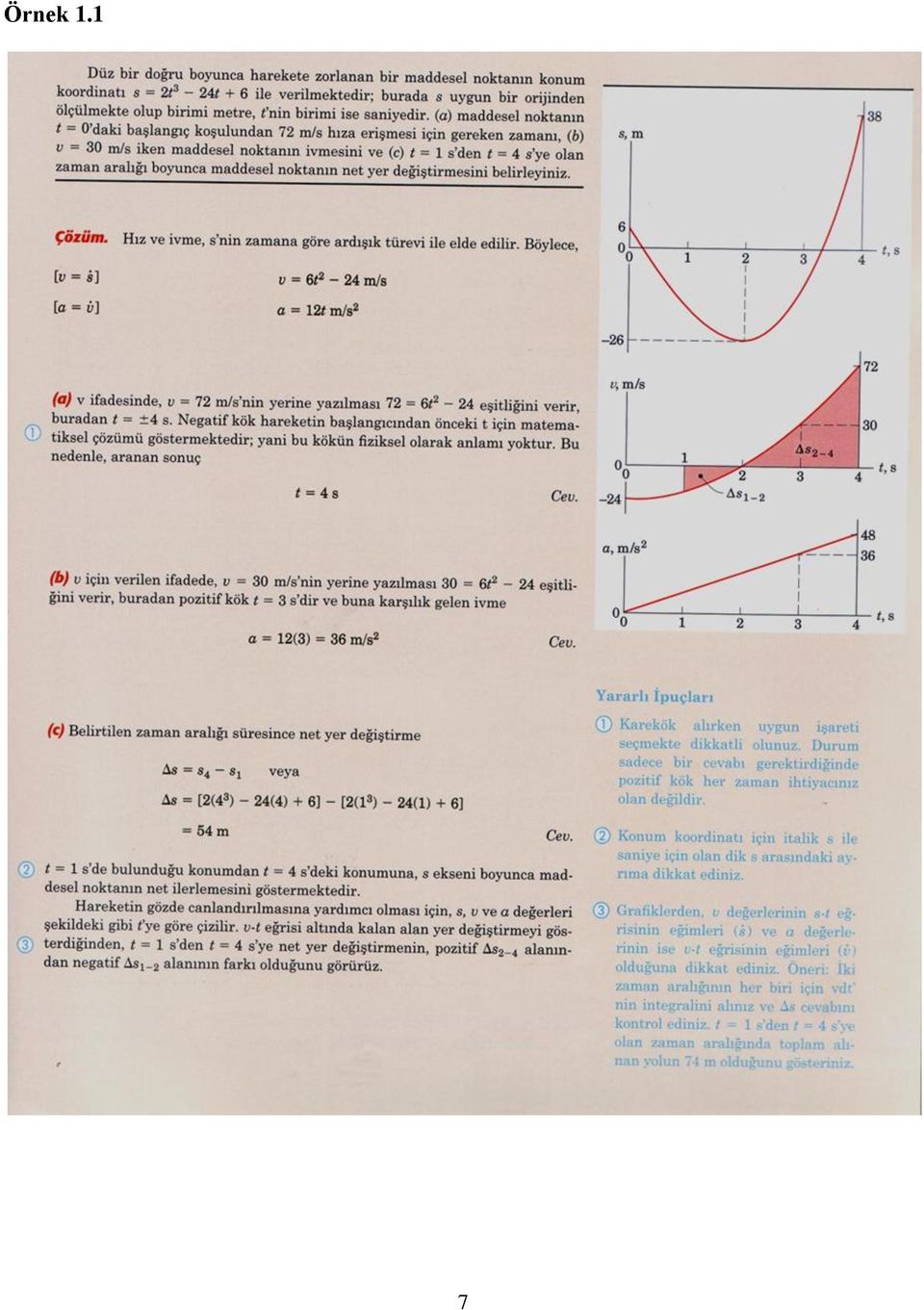
1 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini tanımlayan dinamiğin koludur. Bu nedenle, kinematik genellikle hareketin geometrisi olarak ifade edilir. Tam bir kinematik bilgisi hareket ve harekete sebep olan veya eşlik eden kuvvetler arasındaki ilişkilerin incelendiği kinetik için ön şarttır. Bir maddesel nokta, en genel halde, doğrusal ya da eğrisel bir yörünge üzerinde hareket edebilir. Bu bölümde, ilk olarak, maddesel nokta hareketi kinematiğine giriş için doğrusal hareket incelenecektir. Hareketin kinematiğini, maddesel noktanın verilen herhangi bir andaki konum, hız ve ivmesinin belirlenmesi olarak tanımlayabiliriz Doğrusal Hareket Şekil 1.1 de bir doğru boyunca hareket eden bir maddesel noktanın hareketini dikkate alalım. Bu maddesel nokta herhangi bir t anında P noktasında bulunsun. O halde bu parçacığın konumu aynı doğru üzerindeki uygun sabit bir O referans noktasından ölçülen s mesafesi ile belirlenebilir. t +Δt anında parçacığın P' noktasına hareket etmekte ve konumu s +Δs olmaktadır. Δt zamanı boyunca parçacığın konumundaki değişim Δs yer değişimi olarak adlandırılır. Maddesel nokta O referans noktasının soluna yani negatif s yönünde hareket ediyor ise yer değiştirme negatif olacaktır. - s t anı t +Δt anı O P P' + s s Δs Şekil 1.1 1

2 Hız Δt süresi boyunca parçacın ortalama hızı, yer değiştirmenin zaman aralığına bölümüdür yani v ort = Δs / Δt. Δt giderek sıfıra yaklaştığında ( ), cismin ortalama hızı cismin anlık hızına yaklaşır bunu aşağıdaki gibi ifade edebiliriz: Bundan dolayı hız, yer değiştirme koordinatı s nin zamana göre değişme oranıdır (yani zamana göre türevidir). İvme Δt süresi boyunca parçacın ortalama ivmesi, hızın zaman aralığına bölümüdür yani a ort = Δv/Δt. Δt azalıp limit sıfıra yaklaşırken ( ), cismin ortalama ivmesi cismin anlık ivmesine yaklaşır bunu aşağıdaki gibi ifade edebiliriz: İvme, hızın artmasına veya azalmasına bağlı olarak pozitif veya negatif değerler alabilir. Maddesel nokta yavaşlıyor ise ivmesi negatiftir. Ancak, maddesel noktanın azalmakta olan negatif hıza sahip olması durumunda, maddesel noktanın ivmesinin pozitif olacağına dikkat ediniz. Hız ve ivme, bir sonraki konuda ele alacağımız eğrisel harekette göreceğimiz gibi, aslında vektörel büyüklüklerdir. Ancak, doğrusal harekette, hareketin doğrultusun da herhangi bir değişimi söz konusu değildir yalnızca hız ve ivmenin büyüklüğü değişir, bu yüzden vektörel gösterime ihtiyaç yoktur ve yalnızca skaler olarak işlem yapılabilir. Hareket doğrultusunda meydana gelebilecek yön değişimleri eksi ve artı işaretleri ile tanımlanır. 1.1 ve 1.2 denklemleri arasında dt yok edilerek, yer değiştirme, hız ve ivme için diferansiyel bir denklem elde edebiliriz: 2
, cismin ortalama ivmesi cismin anlık ivmesine yaklaşır bunu aşağıdaki gibi ifade edebiliriz: İvme, hızın artmasına veya azalmasına bağlı olarak pozitif veya")
3 1.1, 1.2 ve 1.3 denklemleri maddesel noktanın doğrusal hareketini temsil eden diferansiyel denklemlerdir. Hareket değişkenlerindeki sonlu değişimleri içeren doğrusal hareket problemleri bu temel diferansiyel denklemlerin integrasyonu ile çözülür. Hatırlatma: Doğrusal hareketi temsil eden diferansiyel denklemler Doğrusal hareketi temsil eden diferansiyel denklemleri daha iyi yorumlayabilmek için konum, hız, ivme ve zaman arasındaki ilişkilerin grafik olarak gösteriminin verildiği Şekil 1.2 yi incelemek yaralı olacaktır. Şekil 1.2a da bir doğrusal hareketin konum-zaman (s - t) grafiği verilmiştir. Herhangi bir t anında s - t eğrisine teğet çizerek o andaki hızı elde edebiliriz. Bu şekilde hız, eğrinin bütün noktalarında belirlenebilir ve Şekil 1.2b de gösterildiği gibi zamana göre çizilebilir. Benzer şekilde, v - t eğrisinin herhangi bir anındaki eğimi o andaki a ivmeyi verir ve buna bağlı olarak a - t eğrisi Şekil 1.2c deki gibi çizilebilir. Şekil 1.3b de dt süresince v - t eğrisi altında kalan alanın ds yer değişimine eşit olduğunu gözlemleyebiliriz (Denklem 1.1 den, ). Benzer şekilde, Şekil 1.2c den dt süresince a-t eğrisini altındaki alanın dv ye eşit olduğunu görüyoruz (Denklem 1.1 den, ). 3
 grafiği verilmiştir.")
4 Bir diğer gözlemimiz ise, Şekil 1.2d de ds yer değiştirmesi süresince a-s eğrisinin altında kalsan alanın Denklem 1.3 den v dv ye eşit olduğudur. (a) (b) (c) (d) Şekil 1.2 4

5 Doğrusal Hareket Türleri İvme a; hız v, konum s ve zaman t arasında ilişki aşağıdaki şekillerde verilmiş olabilir: Sabit ivme (a = sabit) verilebilir. İvme zamanın fonksiyonu olarak a = f (t) verilebilir. İvme hızın fonksiyonu olarak a = f (v) verilebilir. İvme konumun fonksiyonu a = f (s) verilebilir. I. Sabit ivme, a = sabit a sabit olduğunda, 1.2 ve 1.3 denklemleri doğrudan integre edilebilir 1 : Denklem 1.4 Denklem 1.1 de yerine yazılıursa: bağıntısı elde edilir. 1 0 alt indisi başlangıç büyüklüğünü ifade etmektedir. 5

6 II. Zamanın fonksiyonu olarak verilen ivme, a = f (t) İvmenin zamanın fonksiyonu olması durumunda Denklem 1.2, şeklini alır. Zamanın fonksiyonu olarak integre edilen v (t) bağıntısı Denklem 1.1 de yerine yazılırsa s konum koordinatı için, elde edilir. III. Hızın fonksiyonu olarak verilen ivme, a = f (v) İvme hızın bir fonksiyonu olarak verilmiş ise a = f (v) fonksiyonu Denklem 1.3 de yerine yazılırsa s konum koordinatı için, elde edilir. Bu denklemin, t ile belirli bir ilgisi olmadan, v cinsinden s yi verdiğine dikkat ediniz. IV. Konumun fonksiyonu olarak verilen ivme, a = f (s) Bu durumda a = f (s) fonksiyonu Denklem 1.3 de yerine yazılırsa s konum koordinatı için, elde edilir. 6

7 Örnek 1.1 7
8 Örnek 1.2 8

9 Örnek 1.3 s 9

10 Örnek

11 1.3. Düzlemde Eğrisel Hareket Bu bölümde, maddesel noktanın, tek bir düzlemde yer alan eğrisel bir yörünge boyunca olan hareketini yani 2-Boyutlu eğrisel hareketi inceleyeceğiz. Mühendislik uygulamalarında karşılaşılan maddesel nokta hareketinin büyük bir çoğunluğu düzlemsel hareket olarak gösterilebilir. Hatırlatma Doğrusal hareket ile ilgili kinematik incelemelerde hareketin doğrultusunda herhangi bir değişim meydana gelmediği için yalnızca skalar büyüklükler kullanılabilir. Ancak, eğrisel harekette hareketin doğrultusunda değişim olduğu için hız ve ivmenin de doğrultusunda değişim meydana gelecektir. Bu yüzden eğrisel hareket ile ilgili yapılacak kinematik incelemelerde vektörel büyüklüklerin kullanılması zaruridir. A noktasında yer alan bir maddesel noktanın, yol fonksiyonu (veya yörüngesi) s ile tanımlanan düzlemsel eğri boyunca hareketini göz önüne alalım (Şekil 1.3a). O sabit noktasından ölçülen maddesel noktanın konumu, konum vektörü r = r ( t ) ile belirtilir. Maddesel noktanın konum vektörü, eğri üzerinde hareket ettikçe büyüklüğü ve yönü değiştiği için zamanın bir fonksiyonudur. Küçük bir Δt zaman aralığında maddesel noktanın eğri üzerinde Δs yolunu alarak konumu r' = r + Δr ile tanımlanan A' noktasına geldiğini varsayalım. Δr yer değiştirmesi, maddesl noktanın konumundaki değişimi gösterir ve vektör farkı ile belirlenir, yani Δr = r' - r dir. (a) (b) (c) Şekil

12 Hatırlatma Maddesel nokta yörünge boyunca, A konumundan A' konumuna hareket ederken kat ettiği gerçek mesafe, yörünge boyunca ölçülen skaler Δs uzunluğudur. Bu nedenle, Δr yer değiştirme vektörü ile skaler Δs mesafesi birbirinden farklıdır. Hız Maddesel noktanın A ve A' noktaları arasındaki ortalama hızı v ort = Δr / Δt olarak tanımlanır. Maddesel noktanın anlık hızı, Δt sıfıra yaklaşırken ortamla hızın limit değeri olarak tanımlanır. (1.11) Hatırlatma Bir vektörün türevi, hem şiddeti hemde doğrultusu olan yine bir vektördür. Şekil 1.3a da, Δt sıfıra yaklaşırken, Δr nin doğrultusunun yörüngenin A noktasındaki teğetine yaklaştığını kolaylıkla gözlemleyebiliriz. Bu nedenle (hızın doğrultusu, yer değişimi ile aynı olacağı için) hız her zaman yörüngeye teğettir. Hızın şiddeti olarak tanımlanan v nin büyüklüğü ( v = v ), Δr yer değiştirmesinin büyüklüğünün ( Δr = Δr ) A ile A' birleştiren doğru parçasının uzunluğu olduğuna dikkat ederek, elde edilebilir. Şekil 1.3a da, Δr uzunluğu Δt 0 iken Δs yay uzunluğuna yaklaştığını görüyoruz. O halde, sürat olarak adlandırılan hızın büyüklüğü için; (1.12) elde edilir. Böylece, hızın şiddeti (sürat), s yol fonksiyonu zaman göre elde edildiğini görüyoruz. 12

13 Hatırlatma Hız ( v ) Vektörel büyüklük Sürat ( v ) Skaler büyüklük Şekil 1.3b ve c incelediğimzde açık bir şekilde, Δt süresince hızda vektörel bir değişim bulunduğunu görebiliriz. A noktasındaki v hızı ile Δv değişiminin vektörel toplamı, A' noktasındaki hıza eşittir. Yine, Şekil 1.3c bize, Δv nin, v nin hem büyüklüğündeki hem de doğrultusundaki değişime bağlı olduğunu açıkça göstermektedir. İvme Maddesel nokta, t zamanında v hızına ve t + Δt zamanıda ise v' = v + Δv hızına sahip ise maddesel noktanın ortalama ivmesi a ort = Δv / Δt olarak tanımlanır. Maddesel noktanın anlık ivmesi ise, zaman aralığı sıfıra yaklaşırken ortamla ivmenin limit değeri olarak tanımlanmaktadır. (1.13) Δt aralığı çok küçülüp sıfıra yaklaşırken, Δv değişiminin doğrultusu dv diferansiyel değişiminin dolayısıyla da a nın doğrultusuna yaklaşır. Bu nedenle, a ivmesi v hızının hem büyüklüğündeki hem de doğrultusundaki değişim etkilerini içermektedir. Hatırlatma a ivme vektörü v hız vektörünün hem büyüklüğündeki hem de doğrultusundaki değişim etkilerini içerir. 13

14 (a) Şekil 1.4 (b) İvme ile hız arasındaki Denklem 1.13 ile ilişkiyi daha iyi anlayabilmek için, Şekil 1.4 de inceleyelim. Şekil 1.4a da maddesel noktanın yörüngesi üzerinde üç keyfi konuma karşılık gelen vektörleri ve her konum vektörüne karşılık gelen yörüngeye teğet hız vektörleri gösterilmiştir. Bu hız vektörlerini yönü ve doğrultusu değiştirilmeden herhangi bir C noktasına taşıyalım (Şekil 1.4b). Başlangıç noktası C olan bu hız vektörlerinin uçlarını kesen bir eğri çizelim. Hız vektörlerinin uçlarının geometrik yeri olarak tanımlayacağımız bu eğriye hodograf adı verilir ve hız vektörlerinin türevleri (yani ivme vektörleri) bu eğriye teğet olacaktır. Ayrıca, Şekil 1.4 den, hızın konum vektörü ile ivenin ise hız ile ilgili olduğunu da görmekteyiz. Hatırlatma Hız vektörü ( İvme vektörü ( ) her zaman yörüngeye teğettir. ) her zaman hodografa teğettir Kartezyen (Dik) Koordinatlar ( x y ) Bu koordinat sistemi, özellikle ivmenin x ve y bileşenlerinin birbirinden bağımsız olduğu atış (ya da mermi) hareketi gibi problemlerin tanımlanmasında oldukça kullanışlıdır. Ortaya çıkan eğrisel hareket, konum, hız ve ivme vektörlerinin x ve y bileşenlerinin vektörel toplamları ile elde edilir. 14
 her zaman yörüngeye teğettir. ) her zaman hodografa teğettir. 1.")
15 Şekil 1.5 Şekil 1.5 de, Maddesel Noktanın, r konum, v hız ve a ivme vektörleri x ve y bileşenleri cinsinden gösterilmiştir. i ve j birim vektörler olmak üzere konum, hız ve ivmeyi x ve y bileşenleri cinsinden (1.14a) (1.14b) (1.14c) şeklinde yazılabilir. Hatırlatma Üzeri noktalı ( gibi) ifadeler zamana göre türevi göstermek için kullanılır. Hatırlatma Kartezyen koordinatlarda, birim vektörlerin (i ve j) şiddetlerinin yanında yönleri de sabit kaldığı, değişmediği için, zamana göreve türevleri sıfırdır. Daha öncede vurgulandığı gibi, hızı doğrultusu yörüngeye daima teğettir ve Şekil 1.5 den de açıkça görüldüğü gibi, 15
 şiddetlerinin yanında yönleri de sabit kaldığı, değişmediği için, zamana göreve türevleri")
16 olmaktadır. Atış (Mermi) Hareketi Düzlemsel ( 2 - Boyutlu ) eğrisel hareketin en önemli uygulamalarından bir tanesi artış hareketidir. Atış hareketinde, ivme daima düşey doğrultuda olduğu için çoğunlukla dik bileşenler cinsinden yani kartezyen koordinatlarda inceleme yapılır. Kinematik analizde yer alan kavramları açıklamak için, yerçekimi ivmesinin sabit kabul edildiği, hava direncinin ihmal edildiği bir ortamda, bir merminin hareketini göz önüne alalım (Şekil 1.6). Hava direnci ihmal edildiğinde, mermiye etki eden tek kuvvet, merminin yaklaşık g = 9.81 m/s 2 lik aşağı yönlü sabit bir ivme kazanmasına neden olan ağırlığıdır. Buna göre ivme bileşenleri aşağıdaki gibidir; (1.15a) (1.15b) Şekil
. Hava direnci ihmal edildiğinde, mermiye etki eden tek kuvvet, merminin yaklaşık g = 9.")
17 Daha öncede belittiğimiz gibi, mermi hareketinin x ve y bileşenleri birbirinden bağımsız ve doğrusaldır. Bu nedenle, numaralı sabit ivme denklemleri uygulanabilir. Yatay Hareket (a x = 0) ( +) (1.16a) (1.16b) DüşeyHareket (a y = -g) ( +) (1.17a) (1.17b) (1.17c) v x ve v y bileşenleri elde edildikten sonra, yörüngeye daima teğet olan v bileşke hızı, v x ve v y hızlarının vektörel toplamına eşittir. 17
 v x ve v y bileşenleri elde edildikten sonra, yörüngeye daima teğet olan v bileşke hızı, v x ve v")
18 Örnek

19 Örnek

20 Örnek

21 Örnek
22 Normal ve Teğetsel Koordinatlar ( n - t ) 22
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
MIM 210 DİNAMİK DERSİ DERS NOTU
 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği:
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği:
DİNAMİK - 2. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu. Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Gök Mekaniği: Eğrisel Hareket in Kinematiği
 Gök Mekaniği: Eğrisel Hareket in Kinematiği Bundan bir önceki giriş yazımızda Kepler yasaları ve Newton ın hareket kanunlarını vermiş, bunlardan yola çıkarak gök mekaniklerini elde edeceğimizi söylemiştik.
Gök Mekaniği: Eğrisel Hareket in Kinematiği Bundan bir önceki giriş yazımızda Kepler yasaları ve Newton ın hareket kanunlarını vermiş, bunlardan yola çıkarak gök mekaniklerini elde edeceğimizi söylemiştik.
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
DİNAMİK MEKANİK. Şekil Değiştiren Cisimler Mekaniği. Mukavemet Elastisite Teorisi Sonlu Elemanlar Analizi PARÇACIĞIN KİNEMATİĞİ
 DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
HAREKET HAREKET KUVVET İLİŞKİSİ
 HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
DOÇ.DR. İBRAHİM SERKAN MISIR GÜZ
 DİNAMİK 1 DİNAMİK DOÇ.DR. İBRAHİM SERKAN MISIR Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ 2 Değerlendirme 1. Ara sınav (%25) 2. Ara sınav (%25) Final (%50) Dönem:26 Eylül 2016
DİNAMİK 1 DİNAMİK DOÇ.DR. İBRAHİM SERKAN MISIR Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ 2 Değerlendirme 1. Ara sınav (%25) 2. Ara sınav (%25) Final (%50) Dönem:26 Eylül 2016
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 12 Parçacık Kinematiği
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 12 Parçacık Kinematiği
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Öğr. Gör. Serkan AKSU
 Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017
 Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017") SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
EĞRİSEL HAREKET : Silindirik Bileşenler
 EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
Bölüm 4. İki boyutta hareket
 Bölüm 4 İki boyutta hareket İki boyutta Hareket Burada konum, hız ve ivmenin vektör karakteri daha öne çıkacaktır. İlk olarak sabit ivmeli hareketler göz önünde bulundurulacak. Düzgün dairesel hareket
Bölüm 4 İki boyutta hareket İki boyutta Hareket Burada konum, hız ve ivmenin vektör karakteri daha öne çıkacaktır. İlk olarak sabit ivmeli hareketler göz önünde bulundurulacak. Düzgün dairesel hareket
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
DİNAMİK. Ders_2. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_2 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ EĞRİSEL HAREKET: GENEL TANIM VE DİK BİLEŞENLER Bugünün hedefleri:
DİNAMİK Ders_2 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ EĞRİSEL HAREKET: GENEL TANIM VE DİK BİLEŞENLER Bugünün hedefleri:
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DENEY 1. İncelenmesi. Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi
 DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
HAREKETİN KİNEMATİK İNCELENMESİ
 HAREKETİN KİNEMATİK İNCELENMESİ Kinematik, cisimlerin hareketlerini, bu hareketlere neden olan ya da bu hareketler sonucunda oluşan kuvvetlerden bağımsız olarak inceleyen fizik dalıdır. Klasik mekaniğin
HAREKETİN KİNEMATİK İNCELENMESİ Kinematik, cisimlerin hareketlerini, bu hareketlere neden olan ya da bu hareketler sonucunda oluşan kuvvetlerden bağımsız olarak inceleyen fizik dalıdır. Klasik mekaniğin
GÜZ YARIYILI FİZİK 1 DERSİ
 2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) 1 Bölüm 3 İKİ BOYUTTA HAREKET 2 İçerik Yerdeğistirme,
2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) 1 Bölüm 3 İKİ BOYUTTA HAREKET 2 İçerik Yerdeğistirme,
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Doç.Dr. Cesim ATAŞ MEKANİK ŞEKİL DEĞİŞTİREN CİSİMLER MEKANİĞİ DİNAMİK
 STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
Bölüm 4: İki Boyutta Hareket
 Bölüm 4: İki Boyutta Hareket Kavrama Soruları 1- Yerden h yüksekliğinde, yere paralel tutulan bir silah ateşleniyor ve aynı anda silahın yanında başka bir kurşun aynı h yüksekliğinden serbest düşmeye bırakılıyor.
Bölüm 4: İki Boyutta Hareket Kavrama Soruları 1- Yerden h yüksekliğinde, yere paralel tutulan bir silah ateşleniyor ve aynı anda silahın yanında başka bir kurşun aynı h yüksekliğinden serbest düşmeye bırakılıyor.
KATI CİSMİN DÜZLEMSEL KİNETİĞİ
 KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
Elastisite Teorisi Düzlem Problemleri için Sonuç 1
 Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
Bir cismin iki konumu arasındaki vektörel uzaklıktır. Başka bir ifadeyle son konum (x 2 ) ile ilk konum
 ile ilk konum") DOĞRUSAL ve BAĞIL HAREKET Hareket Maddelerin zamanla yer değiştirmesine hareket denir. Fakat cisimlerin nereye göre yer değiştirdiği ve nereye göre hareket ettiği belirtilmelidir. Örneğin at üstünde giden
DOĞRUSAL ve BAĞIL HAREKET Hareket Maddelerin zamanla yer değiştirmesine hareket denir. Fakat cisimlerin nereye göre yer değiştirdiği ve nereye göre hareket ettiği belirtilmelidir. Örneğin at üstünde giden
Ankara Üniversitesi Fen Fakültesi Kimya Bölümü A Grubu 3. Bölüm (Doğrusal Hareket) Özet Aysuhan Ozansoy
 Özet Aysuhan Ozansoy") FİZ101 FİZİK-I Ankara Üniersitesi Fen Fakültesi Kimya Bölümü A Grubu 3. Bölüm (Doğrusal Hareket) Özet Aysuhan Ozansoy Bir şeyi basitçe açıklayamıyorsan onu tam olarak anlamamışsın demektir. Albert Einstein
FİZ101 FİZİK-I Ankara Üniersitesi Fen Fakültesi Kimya Bölümü A Grubu 3. Bölüm (Doğrusal Hareket) Özet Aysuhan Ozansoy Bir şeyi basitçe açıklayamıyorsan onu tam olarak anlamamışsın demektir. Albert Einstein
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s
![r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s](/thumbs/55/37178256.jpg "r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s") Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
KİNEMATİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 6 KİNEMATİK TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN ( HAREKET BİLGİSİ ) Mekaniğin hareketi açıklayan koluna KĠNEMATĠK denir. Hareket, konumun sürekli değiģimidir. Hareket eden cismi, Ģekil değiģikliği
6 KİNEMATİK TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN ( HAREKET BİLGİSİ ) Mekaniğin hareketi açıklayan koluna KĠNEMATĠK denir. Hareket, konumun sürekli değiģimidir. Hareket eden cismi, Ģekil değiģikliği
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Fizik 101-Fizik I 2013-2014. Nurdan Demirci Sankır Enerji Araştırmaları Laboratuarı- YDB Bodrum Kat Ofis: 325, Tel:4332. İçerik
 Fizik 101-Fizik I 2013-2014 İki Boyutta Hareket Nurdan Demirci Sankır Enerji Araştırmaları Laboratuarı- YDB Bodrum Kat Ofis: 325, Tel:4332 İçerik Yerdeğiştirme, hız ve ivme vektörleri Sabit ivmeli iki-boyutlu
Fizik 101-Fizik I 2013-2014 İki Boyutta Hareket Nurdan Demirci Sankır Enerji Araştırmaları Laboratuarı- YDB Bodrum Kat Ofis: 325, Tel:4332 İçerik Yerdeğiştirme, hız ve ivme vektörleri Sabit ivmeli iki-boyutlu
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Bölüm 9: Doğrusal momentum ve çarpışmalar
 Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ
 İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ 1.1. FİZİKTE ÖLÇME VE BİRİMLERİN ÖNEMİ... 2 1.2. BİRİMLER VE BİRİM SİSTEMLERİ... 2 1.3. TEMEL BİRİMLERİN TANIMLARI... 3 1.3.1. Uzunluğun
İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ 1.1. FİZİKTE ÖLÇME VE BİRİMLERİN ÖNEMİ... 2 1.2. BİRİMLER VE BİRİM SİSTEMLERİ... 2 1.3. TEMEL BİRİMLERİN TANIMLARI... 3 1.3.1. Uzunluğun
ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV. ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV
 Türev 2) Türev Uygulamaları TÜREV") - 1 - ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV Kazanım 1 : Türev Kavramını fiziksel ve geometrik uygulamalar yardımıyla açıklar, türevin tanımını
- 1 - ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV Kazanım 1 : Türev Kavramını fiziksel ve geometrik uygulamalar yardımıyla açıklar, türevin tanımını
DİNAMİK Ders_3. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
1)Aşağıdaki konum-zaman grafiğine göre bu hareketlinin 0-30 saniyeleri arasındaki ortalama hızı nedir?
Aşağıdaki konum-zaman grafiğine göre bu hareketlinin 0-30 saniyeleri arasındaki ortalama hızı nedir?") 1)Aşağıdaki konum-zaman grafiğine göre bu hareketlinin 0-30 saniyeleri arasındaki ortalama hızı nedir? A) -1/6 B) 1 C) 1/2 D) 1/5 E) 3 2) Durgun halden harekete geçen bir cismin konum-zaman grafiği şekildeki
1)Aşağıdaki konum-zaman grafiğine göre bu hareketlinin 0-30 saniyeleri arasındaki ortalama hızı nedir? A) -1/6 B) 1 C) 1/2 D) 1/5 E) 3 2) Durgun halden harekete geçen bir cismin konum-zaman grafiği şekildeki
DİNAMİK DERS NOTLARI. Doç.Dr. Cesim ATAŞ
 DİNMİK DERS NOTLRI Kaynaklar: Engineering Mechanics: Dynamics,, SI Version, 6th Edition, J. L. Meriam,, L. G. Kraige Vector Mechanics for Engineers: : Dynamics, Sith Edition, Beer and Johnston Doç.Dr.
DİNMİK DERS NOTLRI Kaynaklar: Engineering Mechanics: Dynamics,, SI Version, 6th Edition, J. L. Meriam,, L. G. Kraige Vector Mechanics for Engineers: : Dynamics, Sith Edition, Beer and Johnston Doç.Dr.
DİNAMİK (2.hafta) Yatay Hareket Formülleri: a x =0 olduğundan ilk hız ile yatay bileşende hareketine devam eder.
 Yatay Hareket Formülleri: a x =0 olduğundan ilk hız ile yatay bileşende hareketine devam eder.") EĞİK ATIŞ Bir merminin serbest uçuş hareketi iki dik bileşen şeklinde, yatay ve dikey hareket olarak incelenir. Bu harekette hava direnci ihmal edilerek çözüm yapılır. Hava direnci ihmal edilince yatay
EĞİK ATIŞ Bir merminin serbest uçuş hareketi iki dik bileşen şeklinde, yatay ve dikey hareket olarak incelenir. Bu harekette hava direnci ihmal edilerek çözüm yapılır. Hava direnci ihmal edilince yatay
3-1 Koordinat Sistemleri Bir cismin konumunu tanımlamak için bir yönteme gereksinim duyarız. Bu konum tanımlaması koordinat kullanımı ile sağlanır.
 Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
elde ederiz. Bu son ifade yeniden düzenlenirse,
 Deney No : M2 Deneyin Adı : İKİ BOYUTTA ESNEK ÇARPIŞMA Deneyin Amacı : İki boyutta esnek çarpışmada, enerji ve momentum korunum bağıntılarını incelemek, momentumun vektörel, enerjini skaler bir büyüklük
Deney No : M2 Deneyin Adı : İKİ BOYUTTA ESNEK ÇARPIŞMA Deneyin Amacı : İki boyutta esnek çarpışmada, enerji ve momentum korunum bağıntılarını incelemek, momentumun vektörel, enerjini skaler bir büyüklük
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Maden Mühendisliği Bölümü MDM 240 Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No:
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Maden Mühendisliği Bölümü MDM 240 Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No:
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ
 Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
TEMEL MEKANİK 5. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
STATİĞİN TEMEL PRENSİPLERİ
 1.1. Temel Kavramlar ve Tanımlar Mühendislik mekaniği: Kuvvet etkisi altındaki cisimlerin denge veya hareket koşullarını inceleyen bilim dalı Genel olarak mühendislik mekaniği Sert (rijit) katı cisimlerin
1.1. Temel Kavramlar ve Tanımlar Mühendislik mekaniği: Kuvvet etkisi altındaki cisimlerin denge veya hareket koşullarını inceleyen bilim dalı Genel olarak mühendislik mekaniği Sert (rijit) katı cisimlerin
Bir boyutta sabit ivmeli hareket..
 Bir boyutta sabit ivmeli hareket.. İvme sabit olduğunda, ortalama ivme ani ivmeye eşit olur. Hız hareketin başından sonuna kadar aynı oranda artar veya azalır. a x = v xf v xi t ; t i = 0 ve t f = t alınmıştır
Bir boyutta sabit ivmeli hareket.. İvme sabit olduğunda, ortalama ivme ani ivmeye eşit olur. Hız hareketin başından sonuna kadar aynı oranda artar veya azalır. a x = v xf v xi t ; t i = 0 ve t f = t alınmıştır
Bağıl hız ve bağıl ivme..
 Bağıl hız ve bağıl ivme.. Bağıl hareket, farklı referans sistemlerindeki farklı gözlemciler tarafından hareketlerin nasıl gözlemlendiğini ifade eder. Aynı hızla giden iki otomobilden birisinde bulunan
Bağıl hız ve bağıl ivme.. Bağıl hareket, farklı referans sistemlerindeki farklı gözlemciler tarafından hareketlerin nasıl gözlemlendiğini ifade eder. Aynı hızla giden iki otomobilden birisinde bulunan
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1. Y. Doç. Dr. Güray Doğan
 ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
ÇEV207 AKIŞKANLAR MEKANİĞİ KİNEMATİK-1 Y. Doç. Dr. Güray Doğan 1 Kinematik Kinematik: akışkanların hareketlerini tanımlar Kinematik harekete sebep olan kuvvetler ile ilgilenmez. Akışkanlar mekaniğinde
matematiksel eşitliğin her iki tarafındaki birim eşitliği kullanılarak a ve b sayılarına ulaşılır.
 Soru 1- Kuzey istikametinde 8m giden bir aracın, sonrasında 6m doğuya ve 10m güneye ilerlediği görülüyorsa, bu aracın hareketi boyunca aldığı toplam yol ve yerdeğiştirmesi kaç metredir? Cevap 1-8m Harekete
Soru 1- Kuzey istikametinde 8m giden bir aracın, sonrasında 6m doğuya ve 10m güneye ilerlediği görülüyorsa, bu aracın hareketi boyunca aldığı toplam yol ve yerdeğiştirmesi kaç metredir? Cevap 1-8m Harekete
Dik koordinat sisteminde yatay eksen x ekseni (apsis ekseni), düşey eksen ise y ekseni (ordinat ekseni) dir.
, düşey eksen ise y ekseni (ordinat ekseni) dir.") ANALĐTĐK GEOMETRĐ 1. Analitik Düzlem Bir düzlemde dik kesişen iki sayı doğrusunun oluşturduğu sisteme analitik düzlem denir. Analitik düzlem, dik koordinat sistemi veya dik koordinat düzlemi olarak da
ANALĐTĐK GEOMETRĐ 1. Analitik Düzlem Bir düzlemde dik kesişen iki sayı doğrusunun oluşturduğu sisteme analitik düzlem denir. Analitik düzlem, dik koordinat sistemi veya dik koordinat düzlemi olarak da
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1
 İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1") DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
Elektromanyetik Dalga Teorisi
 Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Dinamik. Fatih ALİBEYOĞLU -8-
 1 Dinamik Fatih ALİBEYOĞLU -8- Giriş 2 Önceki bölümlerde F=m.a nın maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini kullandık. Hız değişimlerinin yapılan
1 Dinamik Fatih ALİBEYOĞLU -8- Giriş 2 Önceki bölümlerde F=m.a nın maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini kullandık. Hız değişimlerinin yapılan
Doğrusal Demet Işıksallığı 2. Fatma Çağla Öztürk
 Doğrusal Demet Işıksallığı Fatma Çağla Öztürk İçerik Demet Yönlendirici Mıknatıslar Geleneksel Demir Baskın Mıknatıslar 3.07.01 HPFBU Toplantı, OZTURK F. C. Demet Yönlendirici Mıknatıslar Durgun mıknatıssal
Doğrusal Demet Işıksallığı Fatma Çağla Öztürk İçerik Demet Yönlendirici Mıknatıslar Geleneksel Demir Baskın Mıknatıslar 3.07.01 HPFBU Toplantı, OZTURK F. C. Demet Yönlendirici Mıknatıslar Durgun mıknatıssal
fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki olsun. Fonksiyonda meydana gelen artma miktarı
 10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) A-Polar Koordinatlarda (r,θ) Hareket Denkemleri
 EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) A-Polar Koordinatlarda (r,θ) Hareket Denkemleri") DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) Şekildeki gibi dönen bir çubuk üzerinde ilerleyen bilezik hem dönme hareketi hemde merkezden uzaklaşma hareketi yapar. Bu durumda
DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) Şekildeki gibi dönen bir çubuk üzerinde ilerleyen bilezik hem dönme hareketi hemde merkezden uzaklaşma hareketi yapar. Bu durumda
GÜZ YARIYILI FİZİK 1 DERSİ
 2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) Bölüm 2 DOĞRUSAL BĠR YOL BOYUNCA HAREKET (Bir
2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) Bölüm 2 DOĞRUSAL BĠR YOL BOYUNCA HAREKET (Bir
BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER
 BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Yrd. Doç. Dr. Beytullah EREN Çevre Mühendisliği Bölümü BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Atatürk Barajı (Şanlıurfa) BATMIŞ YÜZEYLERE ETKİYEN KUVVETLER
BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Yrd. Doç. Dr. Beytullah EREN Çevre Mühendisliği Bölümü BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Atatürk Barajı (Şanlıurfa) BATMIŞ YÜZEYLERE ETKİYEN KUVVETLER
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel