BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
|
|
|
- Aygül Ağçay
- 10 yıl önce
- İzleme sayısı:
Transkript
1 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
2 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s;
] olarak gösterilir.")
3 ÇÖZÜM: a)
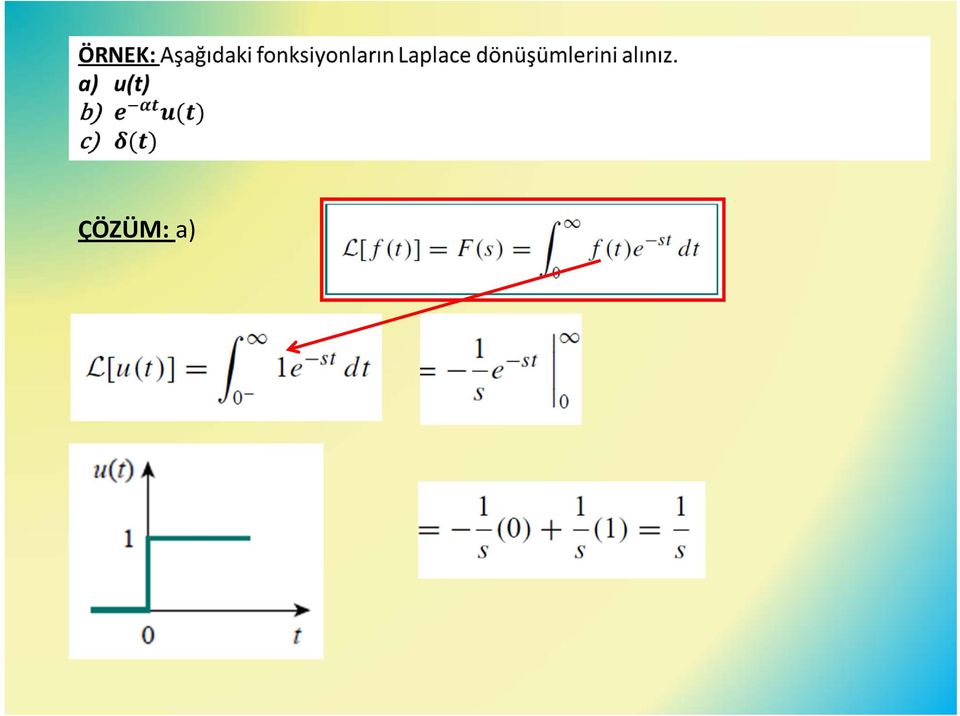
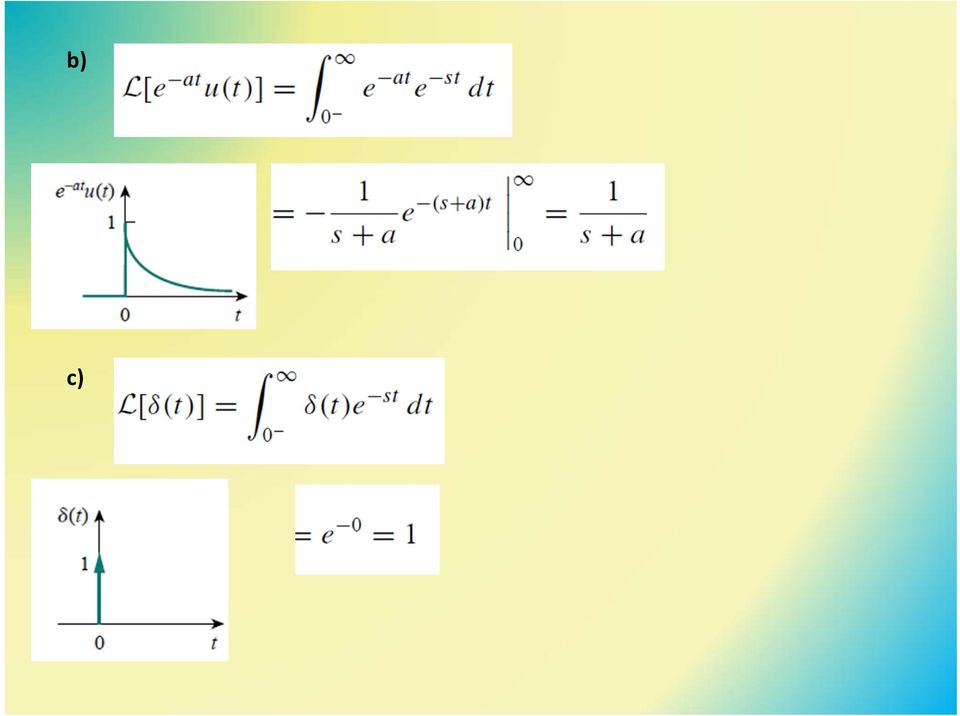
4 b) c)
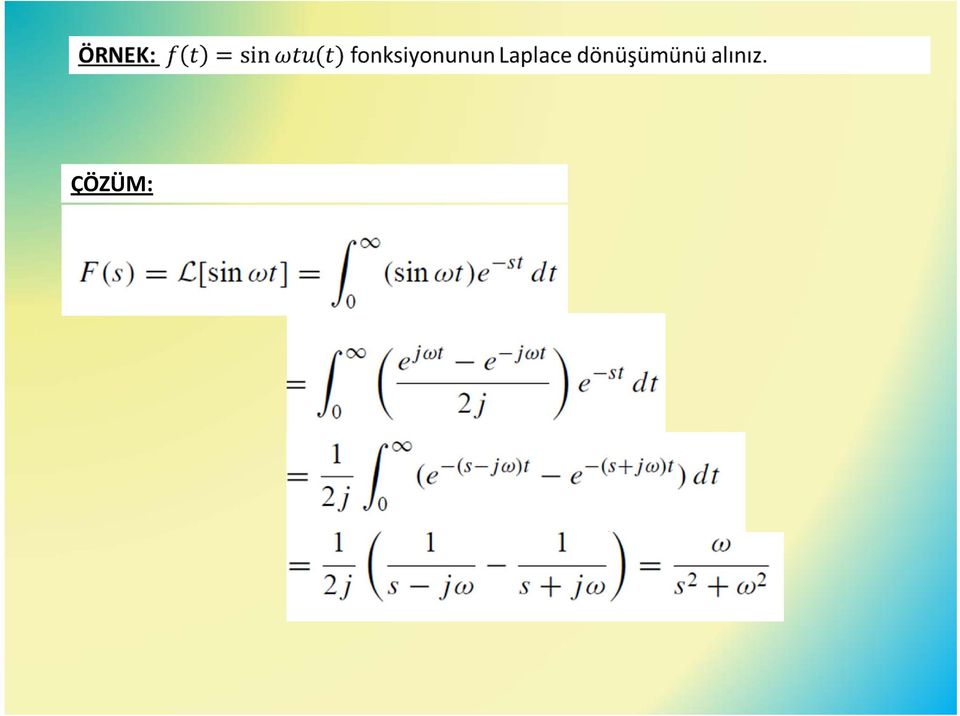
5 ÇÖZÜM:
6 6.3. Laplace Dönüşümün Özellikleri 1. Doğrusallık Bilindiğine göre;

7 6.3. Laplace Dönüşümün Özellikleri 2. Ölçeklendirme a bir sabit ve a>0 ise ; x= at ve dx=a.dt olduğuna göre;

8 3. Zamanda Öteleme f(t) fonksiyonun Laplace dönüşümü F[s] ise;

9 Eğer; x=t a olarak tanımlarsak, dx=dt ve t=x+a olur.

10 ÖRNEĞİN; Olduğu biliniyor.? Özelliği kullanılarak;

11 4. Frekansta Kaydırma f(t) fonksiyonun Laplace dönüşümü F[s] ise;

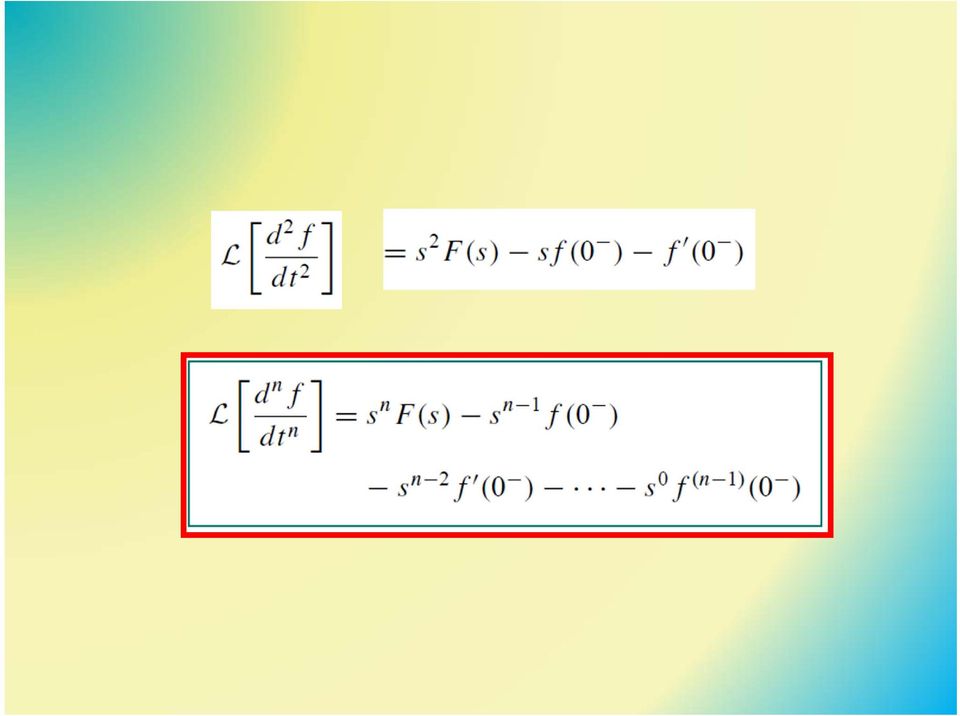
12 4. Diferansiyelini Almak
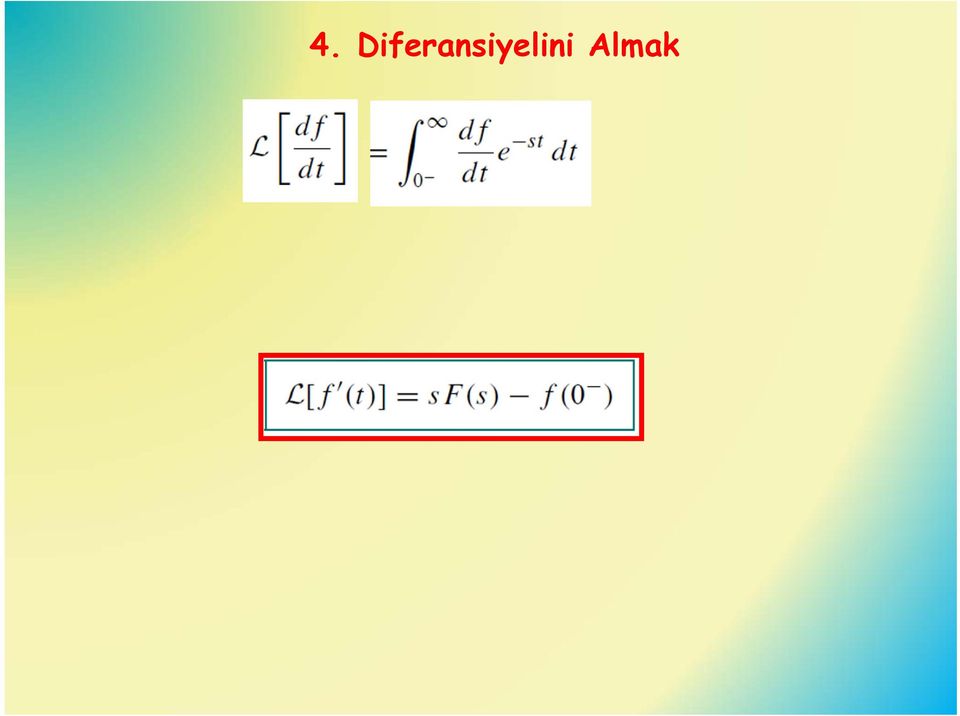
13
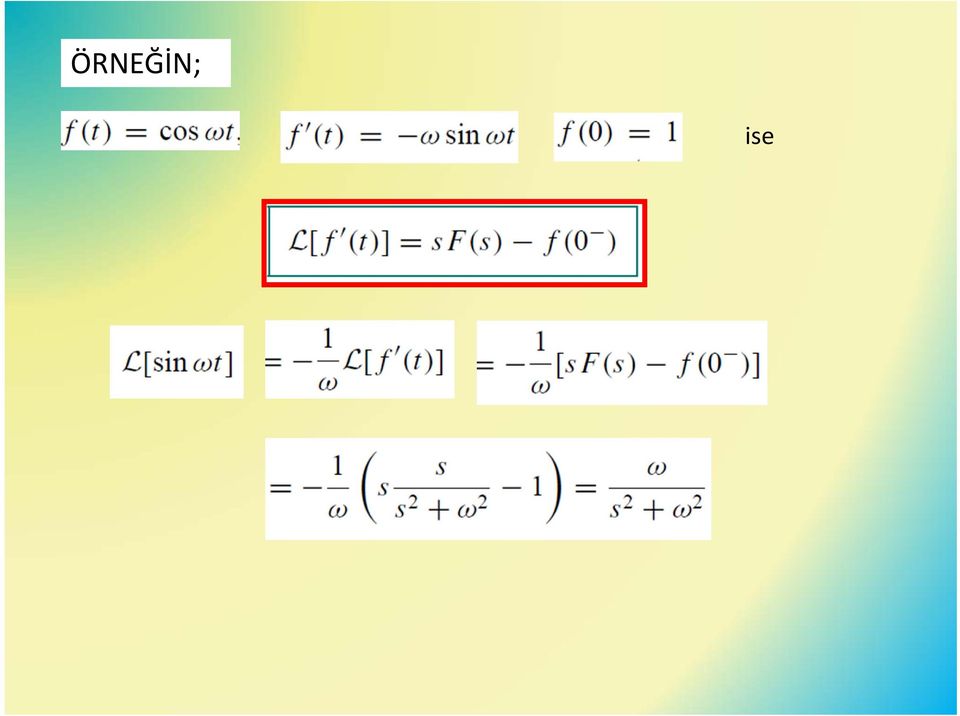
14 ÖRNEĞİN; ise
15 5. İntegralini Almak

16 ÖRNEĞİN; f(t)=u(t) iken laplace alınırsa F[s]=1/s olur.

17 6. Frekans Düzleminde Türevini Almak f(t) fonksiyonun Laplace dönüşümü F[s] ise; s düzleminde türevi alınırsa;

18 ÖRNEĞİN; Bilindiğine göre; 7. Zamanda Periyodiklik

19 Her bir terimin Laplace Dönüşümü alınırsa;

20 8. Başlangıç ve Son Değerler Başlangıç değeri için; ÖRNEĞİN; Olduğu biliniyor

21 Son değeri için; ÖRNEĞİN; Olduğu biliniyor
22 ÖRNEĞİN; Dikkat Sonuç hatalı!!!! NOT: SAYFA 656 daki Tablolar incelenecek!!!!!
23 ÖRNEK: Aşağıdaki fonksiyonun Laplace Dönüşümünü elde ediniz. ÇÖZÜM: Her bir ifadenin ayrı ayrı laplace dönüşümü alınıp, toplanır.
24 ÖRNEK: Aşağıdaki fonksiyonun Laplace Dönüşümünü elde ediniz. ÇÖZÜM: Olduğu biliniyor ise; Frekansta türevini alma özelliği kullanılır.
25 ÖRNEK: Yandaki grafiği veren fonksiyonun Laplace dönüşümünü bulunuz.
26 ÖRNEK: Yandaki grafiği veren fonksiyonun Laplace dönüşümünü bulunuz. Fonksiyonun periyodu T=2 Laplace Dönüşümü uygulanır
27 Özelliği kullanılarak;
28 ÖRNEK: Aşağıda Laplace Dönüşümü verilen fonksiyonun başlangıç ve son değerlerini elde ediniz. Başlangıç değeri için;
29 Son değeri için önce teoremin uygulanabilir olup olmadığına bakılmalıdır. Bunun için kutupların bulunduğu yerler tespit edilir. Kutupları s= 3 ile s= 4±j3 de; yani s düzleminin sol yarısında yer alır. Teorem uygulanabilir!
30
31 6.4. Ters Laplace Dönüşümleri Elimizde bulunan s düzlemindeki fonksiyon pay ve payda olarak ifade edilebilir. Ters Laplace dönüşümü elde edebilmek için; 1. Fonksiyonun pay ve paydası çarpanlara ayrılır, 2. Her bir terimin Ters laplace bulunur.
32 Basit Kutuplar Denklemin kutupları Denklemde N(s) in derecesinin D(s) den az olduğu kabul edilerek; 1. Kutuptaki sabiti bulmak için;
33 Basit Kutuplar değeri için Herhangi bir değeri için Sonuç itibari ile F(s) fonksiyonunun ters laplace dönüşümü;
34 Tekrarlanan Kutuplar F(s) fonksiyonunun n tane tekrarlanan kutbunun olduğunu varsayalım; değeri için değeri için değeri için
35 Tekrarlanan Kutuplar
36 Kompleks Kutuplar kompleks kutupları içeren kompleks kutbu olmayan Kompleks kutbu olmayan kısmı için basit veya tekrarlanan kutuplardaki gibi işlem yapılır; Kompleks kutbu olanlar için ise kendi kutup değeri haricinde özel değerler verilerek bulunur.
37 ÖRNEK: Aşağıdaki fonksiyonun ters laplace ifadesini bulunuz. ÇÖZÜM: Ters Laplace ifadesi her bir terimin ayrı ayrı dönüşümüm alınarak bulunabilir.
38 ÖRNEK: Aşağıdaki fonksiyonun ters laplace ifadesini bulunuz. ÇÖZÜM: Öncelikli olarak çarpanlara ayırarak fonksiyon ayrıştırılır. Bu fonksiyon basit kutup ifadelerine sahiptir.
39 1. YOL:
40 2. YOL: s' in kuvvetlerine göre denklem katsayılarını eşitlersek;
41 ÖRNEK: Aşağıdaki verilen V(S) fonksiyonundan v(t) ifadesini bulunuz.
42 ÇÖZÜM: Bir önceki örneğin tersine bu fonksiyon tekrarlanan kutup ifadelerine sahiptir.
43 1. YOL:
44 2. YOL: Denklemin her iki tarafı İle çarpılır.
45 ÖRNEK: Aşağıdaki verilen H(S) fonksiyonundan h(t) ifadesini bulunuz. ÇÖZÜM: Bu örnekte fonksiyon kompleks kutba sahiptir. (s= 4±3j)
46 1. YOL: Kompleks olmayan Kompleks B ve C için bu yönteme devam edilebilir ama kompleks köklerden kaynaklanan kompleks işlemler meydana gelir. Bu işlemlerden kaçınmak için, H(s) fonksiyonuna kutup değerleri hariç özel s değerleri (s=0 ve s=1) verilir.
47 2. YOL: Denklemin her iki tarafı İle çarpılır.
48 Ters Laplace Dönüşümü yapılırsa;
49 6.5. Devre Uygulamaları Laplace dönüşümünü devrelere uygulamak için; 1. Devre zaman düzleminden s düzlemine çevrilir. 2. Devre uygun bir devre analiz yöntemi ile çözülür (Düğüm gerilimleri, K.A.K, süperpozisyon v.b.) 3. Çıkan sonuç ters laplace dönüşümü yapılarak zaman düzlemine çevrilir. Devre elemanları nasıl s düzlemine çevrilir? Zaman düzleminde direnç için akım gerilim ilişkisi; Laplace dön. alındığında;
50 Endüktör için; Laplace dön. alındığında; veya Kapasite için; Laplace dön. alındığında; veya
51 Eğer başlangıç değerleri sıfır kabul edilirse; ÖRNEK: Şekildeki devre için başlangıç koşullarının sıfır olduğu kabul edilerek (t) gerilimini bulunuz.
52
53 ÖRNEK: Şekildeki devre için 0 5 ise (t) gerilimini bulunuz.
54 K.A.K. uygulanırsa; Denklem düzenlenip 10 ile çarpılırsa; Denklemi kutuplarına göre çarpanlarına ayıralım;
55 ÖRNEK: Şekildeki devrede anahtar a konumundan b konumuna t=0 da geçmektedir. t>0 için i(t) ifadesini bulunuz. Endüktörün başlangıç akım değeri Çevre analizini yaparsak;
56 Kutuplarına göre çarpanlarına ayrılır. Son değeri;
57 6.6. Transfer Fonksiyonu Eğer; veya Bu durumdaki cevaba birim dürtü cevabı denir;
58 ÖRNEK: Devrenin çıkışı; Girişi; Sistemin transfer fonksiyonunu ve birim dürtü yanıtını bulunuz. ÇÖZÜM: Önce x(t) ve y(t) ifadelerinin Laplace dönüşümleri bulunur. h(t) yi elde edebilmek için bir takım değişiklikler yapılır.
59 ÖRNEK: Yandaki devrenin transfer fonksiyonunu H(s)= / bulunuz. 1. YOL: Akım bölmeden;
60 2. YOL: Ladder (merdiven) yöntemi uygulanabilir. =1V olarak kabul edelim. Bu durumda ; 2+1/2s empedansının üzerindeki gerilim; gerilimi s+4 empedansı üzerindeki gerilimle aynıdır.
61
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
DENEY 5 SÜPERPOZİSYON VE MAKSİMUM GÜÇ AKTARIMI
 DENEY 5 SÜPERPOZİSYON VE MAKSİMUM GÜÇ AKTARIMI 5.1. DENEYİN AMACI Deneyin amacı, Süperposizyon Teoreminin ve Maksimum Güç Transferi için gerekli kuşulların öğrenilmesi ve laboratuvar ortamında test edilerek
DENEY 5 SÜPERPOZİSYON VE MAKSİMUM GÜÇ AKTARIMI 5.1. DENEYİN AMACI Deneyin amacı, Süperposizyon Teoreminin ve Maksimum Güç Transferi için gerekli kuşulların öğrenilmesi ve laboratuvar ortamında test edilerek
Bölüm 1. Elektriksel Büyüklükler ve Elektrik Devre Elemanları
 Bölüm Elektriksel Büyüklükler ve Elektrik Devre Elemanları. Temel Elektriksel Büyüklükler: Akım, Gerilim, Güç, Enerji. Güç Polaritesi.3 Akım ve Gerilim Kaynakları F.Ü. Teknoloji Fak. EEM M.G. .. Temel
Bölüm Elektriksel Büyüklükler ve Elektrik Devre Elemanları. Temel Elektriksel Büyüklükler: Akım, Gerilim, Güç, Enerji. Güç Polaritesi.3 Akım ve Gerilim Kaynakları F.Ü. Teknoloji Fak. EEM M.G. .. Temel
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
DİĞER ANALİZ TEKNİKLERİ
 DİĞER ANALİZ TEKNİKLERİ İÇERİK EŞDEĞERLİK DOĞRUSALLIK KAYNAK DÖNÜŞÜMÜ SUPERPOZİSYONUN UYGULANMASI THEVENIN VE NORTON TEOREMLERİ ENFAZLA GÜÇ AKTARIMI EE-201, Ö.F.BAY 1 DİĞER ANALİZ TEKNİKLERİ ÖĞRENME HEDEFLERİ
DİĞER ANALİZ TEKNİKLERİ İÇERİK EŞDEĞERLİK DOĞRUSALLIK KAYNAK DÖNÜŞÜMÜ SUPERPOZİSYONUN UYGULANMASI THEVENIN VE NORTON TEOREMLERİ ENFAZLA GÜÇ AKTARIMI EE-201, Ö.F.BAY 1 DİĞER ANALİZ TEKNİKLERİ ÖĞRENME HEDEFLERİ
DENEY-6 THEVENİN TEOREMİNİN İNCELENMESİ MAKSİMUM GÜÇ TRANSFERİ
 DENEY-6 THEVENİN TEOREMİNİN İNCELENMESİ MAKSİMUM GÜÇ TRANSFERİ Deneyin Amacı : Thevenin teoreminin geçerliliğinin deneysel olarak gözlemlenmesi. Maksimum güç transferi teoreminin geçerliliğinin deneysel
DENEY-6 THEVENİN TEOREMİNİN İNCELENMESİ MAKSİMUM GÜÇ TRANSFERİ Deneyin Amacı : Thevenin teoreminin geçerliliğinin deneysel olarak gözlemlenmesi. Maksimum güç transferi teoreminin geçerliliğinin deneysel
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında
![Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında](/thumbs/92/109134106.jpg "Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında") Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
( ) (0) ( ) (2 )... ( )...
 (0) ( ) (2 )... ( )...") Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
f(t)e st dt s > 0 Cebirsel denklem s- tanım bölgesi L 1 Unutulmamalıdır ki, farklı türden tanım ve değer uzayları arasında
e st dt s > 0 Cebirsel denklem s- tanım bölgesi L 1 Unutulmamalıdır ki, farklı türden tanım ve değer uzayları arasında") Bölüm #2 Laplace Dönüşümü F (s) = f(t)e st dt s > şeklinde tanımlanan dönüşüme LAPLACE dönüşümü adı verilir ve kısaca L{f(t)} ile sembolize edilir. Diferansiyel denklemlerin Çözümünde Laplace dönüşümü
Bölüm #2 Laplace Dönüşümü F (s) = f(t)e st dt s > şeklinde tanımlanan dönüşüme LAPLACE dönüşümü adı verilir ve kısaca L{f(t)} ile sembolize edilir. Diferansiyel denklemlerin Çözümünde Laplace dönüşümü
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Diferansiyel denklemler uygulama soruları
 . Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
. Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
OTOMATİK KONTROL DERS NOTLARI. DERLEYEN: Doç. Dr. Hüseyin BULGURCU. Kasım 2014. BAU MMF Makine Müh. Bölümü
 1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin
1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
Elektrik Devre Temelleri
 Elektrik Devre Temelleri 3. TEMEL KANUNLAR-2 Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi ÖRNEK 2.5 v 1 ve v 2 gerilimlerini bulun. (KGK) 1 PROBLEM 2.5 v 1 ve v 2
Elektrik Devre Temelleri 3. TEMEL KANUNLAR-2 Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi ÖRNEK 2.5 v 1 ve v 2 gerilimlerini bulun. (KGK) 1 PROBLEM 2.5 v 1 ve v 2
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Elektrik Devre Temelleri 3
 Elektrik Devre Temelleri 3 TEMEL KANUNLAR-2 Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi ÖRNEK 2.5 v 1 ve v 2 gerilimlerini bulun. (KGK) PROBLEM 2.5 v 1 ve v 2 gerilimlerini
Elektrik Devre Temelleri 3 TEMEL KANUNLAR-2 Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi ÖRNEK 2.5 v 1 ve v 2 gerilimlerini bulun. (KGK) PROBLEM 2.5 v 1 ve v 2 gerilimlerini
Bir özvektörün sıfırdan farklı herhangi bri sabitle çarpımı yine bir özvektördür.
 ÖZDEĞER VE ÖZVEKTÖRLER A n n tipinde bir matris olsun. AX = λx (1.1) olmak üzere n 1 tipinde bileşenleri sıfırdan farklı bir X matrisi için λ sayıları için bu denklemi sağlayan bileşenleri sıfırdan farklı
ÖZDEĞER VE ÖZVEKTÖRLER A n n tipinde bir matris olsun. AX = λx (1.1) olmak üzere n 1 tipinde bileşenleri sıfırdan farklı bir X matrisi için λ sayıları için bu denklemi sağlayan bileşenleri sıfırdan farklı
ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ÖLÇME VE DEVRE LABORATUVARI DENEY 2
 ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ÖLÇME VE DEVRE LABORATUVARI DENEY 2 2.1. ÇEVRE AKIMLAR YÖNTEMİ Elektrik devrelerinin çözümünde kullanılan en basit ve en kolay yöntemlerden biri çevre akımları yöntemidir.
ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ÖLÇME VE DEVRE LABORATUVARI DENEY 2 2.1. ÇEVRE AKIMLAR YÖNTEMİ Elektrik devrelerinin çözümünde kullanılan en basit ve en kolay yöntemlerden biri çevre akımları yöntemidir.
Bekleme Hattı Teorisi
 Bekleme Hattı Teorisi Sürekli Parametreli Markov Zincirleri Tanım 1. * +, durum uzayı * +olan sürekli parametreli bir süreç olsun. Aşağıdaki özellik geçerli olduğunda bu sürece sürekli parametreli Markov
Bekleme Hattı Teorisi Sürekli Parametreli Markov Zincirleri Tanım 1. * +, durum uzayı * +olan sürekli parametreli bir süreç olsun. Aşağıdaki özellik geçerli olduğunda bu sürece sürekli parametreli Markov
EEM 307 Güç Elektroniği
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Kontrol Sistemleri Tasarımı
 Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ BÖLÜMÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ MM306 EEM304 SİSTEM KONTROL DİNAMİĞİ SİSTEMLERİNE GİRİŞ Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ MM306 EEM304 SİSTEM KONTROL DİNAMİĞİ SİSTEMLERİNE GİRİŞ Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu
Mustafa Sezer PEHLİVAN. Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü
 * Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü SAYILAR Doğal Sayılar, Tam Sayılar, Rasyonel Sayılar, N={0,1,2,3,,n, } Z={,-3,-2,-1,0,1,2,3, } Q={p/q: p,q Z ve q 0} İrrasyonel Sayılar, I= {p/q
* Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü SAYILAR Doğal Sayılar, Tam Sayılar, Rasyonel Sayılar, N={0,1,2,3,,n, } Z={,-3,-2,-1,0,1,2,3, } Q={p/q: p,q Z ve q 0} İrrasyonel Sayılar, I= {p/q
fonksiyonu aralığında sürekli bir fonksiyon ve için ise olur. Eğer bu aralıktaki bütün x ler için ise bu fonksiyonun noktasında bir minimumu vardır.
 TÜREV UYGULAMALARI Bölüm içinde maksimum, minimum, artan ve azalan fonksiyonlar, büküm noktası, teğet, normal ve belirsizliğin türev yardımıyla giderilmesi işlenmektedir. 11.1 Maksimum ve Minimum (Ekstremum)
TÜREV UYGULAMALARI Bölüm içinde maksimum, minimum, artan ve azalan fonksiyonlar, büküm noktası, teğet, normal ve belirsizliğin türev yardımıyla giderilmesi işlenmektedir. 11.1 Maksimum ve Minimum (Ekstremum)
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders # Otomatik Kontrol Laplas Dönüşümü Pierre-Simon Laplace, 749-87 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ Zamanla değişen bir f(t)
Ders # Otomatik Kontrol Laplas Dönüşümü Pierre-Simon Laplace, 749-87 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ Zamanla değişen bir f(t)
Bölüm 2. İşaretler ve Doğrusal Sistemler
 Bölüm 2 İşaretler ve Doğrusal Sistemler 2.1 TEMEL KAVRAMLAR 2.1.1 İşaret Üzerinde Temel İşlemler 2.1.2.İşaretlerin Sınıflandırılması 2.1.3 Bazı Önemli İşaretler ve Özellikleri 2.1.4. Sistemlerin Sınıflandırılması
Bölüm 2 İşaretler ve Doğrusal Sistemler 2.1 TEMEL KAVRAMLAR 2.1.1 İşaret Üzerinde Temel İşlemler 2.1.2.İşaretlerin Sınıflandırılması 2.1.3 Bazı Önemli İşaretler ve Özellikleri 2.1.4. Sistemlerin Sınıflandırılması
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Bu uygulama saatinde, ders kapsamında şu ana kadar bahsedilen konulara ilişkin MATLAB fonksiyonları tanıtılacaktır.
 Bu uygulama saatinde, ders kapsamında şu ana kadar bahsedilen konulara ilişkin MATLAB fonksiyonları tanıtılacaktır. Polinomial Bir Fonksiyonun Tanıtılması P s s s şeklindeki bir fonksiyona ilişkin nesne,
Bu uygulama saatinde, ders kapsamında şu ana kadar bahsedilen konulara ilişkin MATLAB fonksiyonları tanıtılacaktır. Polinomial Bir Fonksiyonun Tanıtılması P s s s şeklindeki bir fonksiyona ilişkin nesne,
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A
 T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
R 1 R 2 R L R 3 R 4. Şekil 1
 DENEY #4 THEVENİN TEOREMİNİN İNCELENMESİ ve MAKSİMUM GÜÇ TRANSFERİ Deneyin Amacı : Thevenin teoreminin geçerliliğinin deneysel olarak gözlemlenmesi Kullanılan Alet ve Malzemeler: 1) DC Güç Kaynağı 2) Avometre
DENEY #4 THEVENİN TEOREMİNİN İNCELENMESİ ve MAKSİMUM GÜÇ TRANSFERİ Deneyin Amacı : Thevenin teoreminin geçerliliğinin deneysel olarak gözlemlenmesi Kullanılan Alet ve Malzemeler: 1) DC Güç Kaynağı 2) Avometre
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri
 Kontrol Sistemleri") Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
SAYILAR SAYI KÜMELERİ
 SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif tamsayılar
SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif tamsayılar
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
biçimindeki ifadelere iki değişkenli polinomlar denir. Bu polinomda aynı terimdeki değişkenlerin üsleri toplamından en büyük olanına polinomun dereces
 TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
SAYILAR SAYI KÜMELERİ
 1 SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif
1 SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
İşaret ve Sistemler. Ders 3: Periyodik İşaretlerin Frekans Spektrumu
 İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
2. Sunum: Birinci ve İkinci Mertebeden Geçici Devreler
 2. Sunum: Birinci ve İkinci Mertebeden Geçici Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN- R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Geçici analizden kastedilen bir anahtarın
2. Sunum: Birinci ve İkinci Mertebeden Geçici Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN- R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Geçici analizden kastedilen bir anahtarın
10.Konu Tam sayıların inşası
 10.Konu Tam sayıların inşası 1. Tam sayılar kümesi 2. Tam sayılar kümesinde toplama ve çarpma 3. Pozitif ve negatif tam sayılar 4. Tam sayılar kümesinde çıkarma 5. Tam sayılar kümesinde sıralama 6. Bir
10.Konu Tam sayıların inşası 1. Tam sayılar kümesi 2. Tam sayılar kümesinde toplama ve çarpma 3. Pozitif ve negatif tam sayılar 4. Tam sayılar kümesinde çıkarma 5. Tam sayılar kümesinde sıralama 6. Bir
Elektrik Devre Temelleri
 Elektrik Devre Temelleri 2. TEMEL KANUNLAR Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi Bu bölümde Ohm Kanunu Düğüm, dal, çevre 2.1. Giriş Kirchhoff Kanunları Paralel
Elektrik Devre Temelleri 2. TEMEL KANUNLAR Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi Bu bölümde Ohm Kanunu Düğüm, dal, çevre 2.1. Giriş Kirchhoff Kanunları Paralel
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
Elektrik Devre Temelleri
 Elektrik Devre Temelleri Yrd. Doç. Dr. Sibel ÇİMEN Elektronik ve Haberleşeme Mühendisliği Kocaeli Üniversitesi Ders Kitabı Fundamentals of Electric Circuits, by Charles K. Alexander and Matthew N. O. Sadiku,
Elektrik Devre Temelleri Yrd. Doç. Dr. Sibel ÇİMEN Elektronik ve Haberleşeme Mühendisliği Kocaeli Üniversitesi Ders Kitabı Fundamentals of Electric Circuits, by Charles K. Alexander and Matthew N. O. Sadiku,
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI THEVENIN VE NORTON TEOREMLERİNİN UYGULANMASI DENEY SORUMLUSU Arş. Gör. Sertaç SAVAŞ MART
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI THEVENIN VE NORTON TEOREMLERİNİN UYGULANMASI DENEY SORUMLUSU Arş. Gör. Sertaç SAVAŞ MART
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu Elektriksel Sistemlerin Transfer Fonksiyonu Mekanik Sistemlerin Transfer Fonksiyonu Elektromekanik Sistemlerin Transfer Fonksiyonu Doğrusalsızlıklar
Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu Elektriksel Sistemlerin Transfer Fonksiyonu Mekanik Sistemlerin Transfer Fonksiyonu Elektromekanik Sistemlerin Transfer Fonksiyonu Doğrusalsızlıklar
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
DİĞER ANALİZ TEKNİKLERİ
 DİĞER ANALİZ TEKNİKLERİ ÖĞRENME HEDEFLERİ DOĞRUSALLIK SUPERPOZİSYON KAYNAK DÖNÜŞÜMÜ THEVENIN VE NORTON TEOREMLERİ ENFAZLA GÜÇ AKTARIMI EBE-215, Ö.F.BAY 1 BAZI EŞDEĞER DEVRELER EBE-215, Ö.F.BAY 2 DOĞRUSALLIK
DİĞER ANALİZ TEKNİKLERİ ÖĞRENME HEDEFLERİ DOĞRUSALLIK SUPERPOZİSYON KAYNAK DÖNÜŞÜMÜ THEVENIN VE NORTON TEOREMLERİ ENFAZLA GÜÇ AKTARIMI EBE-215, Ö.F.BAY 1 BAZI EŞDEĞER DEVRELER EBE-215, Ö.F.BAY 2 DOĞRUSALLIK
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
6. Sunum: Manye-k Bağlaşımlı Devreler. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 6. Sunum: Manye-k Bağlaşımlı Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Bu ders kapsamında ilgilendiğimiz bütün devre elamanlarının ideal
6. Sunum: Manye-k Bağlaşımlı Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Bu ders kapsamında ilgilendiğimiz bütün devre elamanlarının ideal
FEM ile, Hapsolmuş Kuantum Mekaniksel Sistemlerin Çözümü
 FEM ile, Hapsolmuş Kuantum Mekaniksel Sistemlerin Çözümü Yöntem 8-Mayıs-24 (9-Mayıs-24) Bir boyutlu bir problem için ölçeklenmiş (boyutsuz) niceliklerle yazılmış Schrodinger denklemi ve Hamiltoniyen Hψ(z)
FEM ile, Hapsolmuş Kuantum Mekaniksel Sistemlerin Çözümü Yöntem 8-Mayıs-24 (9-Mayıs-24) Bir boyutlu bir problem için ölçeklenmiş (boyutsuz) niceliklerle yazılmış Schrodinger denklemi ve Hamiltoniyen Hψ(z)
GEÇİCİ OLAYLARIN İNCELENMESİ
 KTÜ, lektrik lektronik Müh. Böl. Temel lektrik Laboratuarı I GÇİİ OLAYLARIN İNLNMSİ Sistemlerin bir sürekli rumdan ikinci bir sürekli ruma geçerken gösterdikleri davranışlara geçici olaylar denilmektedir.
KTÜ, lektrik lektronik Müh. Böl. Temel lektrik Laboratuarı I GÇİİ OLAYLARIN İNLNMSİ Sistemlerin bir sürekli rumdan ikinci bir sürekli ruma geçerken gösterdikleri davranışlara geçici olaylar denilmektedir.
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ RLC DEVRELERİ DR GÖRKEM SERBES Paralel RLC Devresi Paralel RLC Devresi Seri RLC Devresi Seri RLC Devresi Seri & Paralel RLC: Çözüm RLC Çözümü : Aşırı-Sönümlü (Over-damped) ÖRNEK 92
BLM1612 DEVRE TEORİSİ RLC DEVRELERİ DR GÖRKEM SERBES Paralel RLC Devresi Paralel RLC Devresi Seri RLC Devresi Seri RLC Devresi Seri & Paralel RLC: Çözüm RLC Çözümü : Aşırı-Sönümlü (Over-damped) ÖRNEK 92
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Alıştırmalar 1. 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.
 Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.") Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
Yeşilköy Anadolu Lisesi
 Yeşilköy Anadolu Lisesi TANIM (KONUYA GİRİŞ) a, b, c gerçel sayı ve a ¹ 0 olmak üzere, ax 2 + bx + c = 0 biçimindeki her açık önermeye ikinci dereceden bir bilinmeyenli denklem denir. Bu açık önermeyi
Yeşilköy Anadolu Lisesi TANIM (KONUYA GİRİŞ) a, b, c gerçel sayı ve a ¹ 0 olmak üzere, ax 2 + bx + c = 0 biçimindeki her açık önermeye ikinci dereceden bir bilinmeyenli denklem denir. Bu açık önermeyi
Elektrik Devre Temelleri 11
 Elektrik Devre Temelleri 11 KAPASİTÖR VE ENDÜKTÖR Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi 6.1. Giriş Bu bölümde doğrusal iki devre elemanı olan kapasitör (capacitor)
Elektrik Devre Temelleri 11 KAPASİTÖR VE ENDÜKTÖR Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi 6.1. Giriş Bu bölümde doğrusal iki devre elemanı olan kapasitör (capacitor)
DC DEVRE ÇÖZÜM YÖNTEMLERİ
 DC DEVRE ÇÖZÜM YÖNTEMLERİ Elektrik devresi, kaynak ve yük gibi çeşitli devre elemanlarının herhangi bir şekilde bağlantısından meydana gelir. Bu gibi devrelerin çözümünde genellikle, seri-paralel devrelerin
DC DEVRE ÇÖZÜM YÖNTEMLERİ Elektrik devresi, kaynak ve yük gibi çeşitli devre elemanlarının herhangi bir şekilde bağlantısından meydana gelir. Bu gibi devrelerin çözümünde genellikle, seri-paralel devrelerin
Şeklinde ifade edilir. Çift yan bant modülasyonlu işaret ise aşağıdaki biçimdedir. ile çarpılırsa frekans alanında bu sinyal w o kadar kayar.
 GENLİK MODÜLASYONU Mesaj sinyali m(t) nin taşıyıcı sinyal olan c(t) nin genliğini modüle etmesine genlik modülasyonu (GM) denir. Çeşitli genlik modülasyonu türleri vardır, bunlar: Çift yan bant modülasyonu,
GENLİK MODÜLASYONU Mesaj sinyali m(t) nin taşıyıcı sinyal olan c(t) nin genliğini modüle etmesine genlik modülasyonu (GM) denir. Çeşitli genlik modülasyonu türleri vardır, bunlar: Çift yan bant modülasyonu,
İÇİNDEKİLER BASİT EŞİTSİZLİKLER. HARFLİ İFADELER Harfli İfadeler ve Elemanları Eşitsizlik Sembolleri ve İşaretin Eşitsizlik İfadesi...
 İÇİNDEKİLER HARFLİ İFADELER Harfli İfadeler ve Elemanları... 1 Benzer Terim... Harfli İfadenin Terimlerini Toplayıp Çıkarma... Harfli İfadelerin Terimlerini Çarpma... Harfli İfadelerde Parantez Açma...
İÇİNDEKİLER HARFLİ İFADELER Harfli İfadeler ve Elemanları... 1 Benzer Terim... Harfli İfadenin Terimlerini Toplayıp Çıkarma... Harfli İfadelerin Terimlerini Çarpma... Harfli İfadelerde Parantez Açma...
Chapter 5. Elektrik Devreleri. Principles of Electric Circuits, Conventional Flow, 9 th ed. Floyd
 Elektrik Devreleri Summary Özet Seri devreler Tüm devreler üç ortak özelliğe sahiptir. Bunlar: 1. Gerilim kaynağı. 2. Yük (load). 3. Kapalı yol. Seri bir devrede yalnızca tek bir akım yolu vardır. R 1
Elektrik Devreleri Summary Özet Seri devreler Tüm devreler üç ortak özelliğe sahiptir. Bunlar: 1. Gerilim kaynağı. 2. Yük (load). 3. Kapalı yol. Seri bir devrede yalnızca tek bir akım yolu vardır. R 1
Atatürk Anadolu. Temel Kavramlar Üzerine Kısa Çalışmalar
 Atatürk Anadolu Lisesi M A T E M A T İ K Temel Kavramlar Üzerine Kısa Çalışmalar KONYA \ SELÇUKLU 01 MATEMATİK 1. TEMEL KAVRAMLAR 1.1. RAKAM Sayıların yazılmasında kullanılan sembollere rakam denir. Onluk
Atatürk Anadolu Lisesi M A T E M A T İ K Temel Kavramlar Üzerine Kısa Çalışmalar KONYA \ SELÇUKLU 01 MATEMATİK 1. TEMEL KAVRAMLAR 1.1. RAKAM Sayıların yazılmasında kullanılan sembollere rakam denir. Onluk
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
12.Konu Rasyonel sayılar
 12.Konu Rasyonel sayılar 1. Rasyonel sayılar 2. Rasyonel sayılar kümesinde toplama ve çarpma 3. Rasyonel sayılar kümesinde çıkarma ve bölme 4. Tam rayonel sayılar 5. Rasyonel sayılar kümesinde sıralama
12.Konu Rasyonel sayılar 1. Rasyonel sayılar 2. Rasyonel sayılar kümesinde toplama ve çarpma 3. Rasyonel sayılar kümesinde çıkarma ve bölme 4. Tam rayonel sayılar 5. Rasyonel sayılar kümesinde sıralama
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
Enerji Sistemleri Mühendisliği Bölümü
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
Hiperstatik sistemlerin çözümünde, yer değiştirmelerin küçük olduğu ve gerilme - şekil değiştirme bağıntılarının lineer olduğu kabul edilmektedir.
 1. HİPERSTATİK SİSTEMLER 1.1. Giriş Bir sistemin hesabının amacı, dış etkilerden meydana gelen kesit tesirlerini, şekil değiştirmelerini ve yer değiştirmelerini belirlemektir. İzostatik sistemlerde, yalnız
1. HİPERSTATİK SİSTEMLER 1.1. Giriş Bir sistemin hesabının amacı, dış etkilerden meydana gelen kesit tesirlerini, şekil değiştirmelerini ve yer değiştirmelerini belirlemektir. İzostatik sistemlerde, yalnız
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
B: Bu şekildeki her bir nokta dikdörtgenin noktalarını temsil eder.
 2. ÇOK KATLI İNTEGRALLER, DİFERENSİYEL DENKLEMLERE GİRİŞ 2.1. Çok Katlı İntegraller 2.1.1. İki Katlı İntegraller Fonksiyonu bir B bölgesinde sınırlı yani için olsun. B bölgesi alt bölgelere ayrılırsa;
2. ÇOK KATLI İNTEGRALLER, DİFERENSİYEL DENKLEMLERE GİRİŞ 2.1. Çok Katlı İntegraller 2.1.1. İki Katlı İntegraller Fonksiyonu bir B bölgesinde sınırlı yani için olsun. B bölgesi alt bölgelere ayrılırsa;
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
Problemler: Devre Analizi-II
 Problemler: Devre Analizi-II P.7.1 Grafiği verilen sinüsoidalin hem sinüs hem de kosinüs cinsinden ifadesini yazınız. v(t) 5 4 3 2 1 0-1 t(saniye) -2-3 -4-5 0 1 2 3 4 5 6 7 8 9 10 P.7.2 v1(t) 60Cos( 100
Problemler: Devre Analizi-II P.7.1 Grafiği verilen sinüsoidalin hem sinüs hem de kosinüs cinsinden ifadesini yazınız. v(t) 5 4 3 2 1 0-1 t(saniye) -2-3 -4-5 0 1 2 3 4 5 6 7 8 9 10 P.7.2 v1(t) 60Cos( 100
5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri
 Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
Örneğin bir önceki soruda verilen rüzgâr santralinin kapasite faktörünü bulmak istersek
 KAPASİTE FAKTÖRÜ VE ENERJİ TAHMİNİ Kapasite faktörü (KF) bir santralin ne kadar verimli kullanıldığını gösteren bir parametredir. Santralin nominal gücü ile yıllık sağladığı enerji miktarı arasında ilişki
KAPASİTE FAKTÖRÜ VE ENERJİ TAHMİNİ Kapasite faktörü (KF) bir santralin ne kadar verimli kullanıldığını gösteren bir parametredir. Santralin nominal gücü ile yıllık sağladığı enerji miktarı arasında ilişki