Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında
|
|
|
- Aylin Aladağ
- 5 yıl önce
- İzleme sayısı:
Transkript
1 Z DÖNÜŞÜMÜ
2 Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde tanımlandığında sisteme x[n]=z n şeklinde giriş uygulandığında sistem çıkışı Şeklinde olmaktadır. Görüldüğü gibi sisteme üstel giriş uygulandığında çıkış aynı üstel girişin bir katsayı ile ölçeklenmiş hali olmaktadır. sistemin transfer fonksiyonudur.
3 y[n]=x[n-n 0 ], n 0 >0 sisteminin transfer fonksiyonu? a)sistem girişine x[n]=z n üsteli uygulanırsa y[n]=x[n-n 0 ]=z (n-n0) =z n z -n0 Transfer fonksiyonunun tanımına göre sisteme x[n]=z n şeklinde üstel uygulandığında sistem çıkışı H(z)z n şeklinde olmaktadır. Bu durumda bu sistemin transfer fonksiyonu H(z)=z -n0 b) Sisteme dürtü giriş uygulandığında dürtü cevabı h[n]=δ[n-n 0 ] elde edilir. Transfer fonksiyonunun matematiksel ifadesinden c) Bu sisteme x=0.5 n girişi uygulandığında çıkış? y[n]= 0.5 n 0.5 -n0= 0.5 (n-n0)
4 Z dönüşümü Burada z karmaşık değerli bir değişkendir. Sistemin dürtü yanıtının z dönüşümü transfer fonksiyonunu verir. x[n] işareti nedensel olduğunda Tek yanlı z dönüşümü
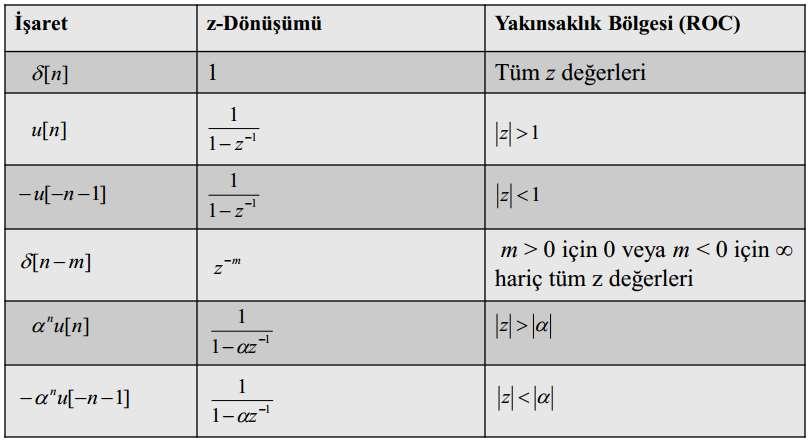
5 Birim dürtü işaretinin x[n]=δ[n] Z dönüşümü? Ötelenmiş biri dürtünün x[n]=δ[n-n 0 ] Z dönüşümü? Dürtü yanıtı olan sistemin transfer fonksiyonu? h[n]= H(z)=
6 Yakınsaklık bölgesi Belirli bir x[n] işaret için Z dönüşümünün hesaplanabildiği ve sonlu X(z) değerlerinin elde edildiği aralığa yakınsaklık bölgesi denir. ROC z >a ROC z <a ROC a< z <b ROC=region of convergence
7 Yakınsaklık bölgesinin özellikleri Yakınsaklık bölgesi halka veya disk şeklindedir. Yakınsaklık bölgesi kutupları kapsayamaz. x[n] sonlu uzunlukta bir dizi ise yakınsaklık bölgesi tüm z bölgesidir. x[n] sağ taraflı bir dizi ise yakınsaklık bölgesi en dıştaki kutuptan dışarı doğrudur. x[n] sol taraflı bir dizi ise yakınsaklık bölgesi en içteki kutuptan içeri doğrudur. x[n] çift taraflı bir dizi ise yakınsaklık bölgesi kutuplar ile sınırlandırılmış halka şeklindedir. Yakınsaklık bölgesi mutlaka bağlantılı olmalıdır.
8 X[n]=u[n] işaretinin z dönüşümü
9 işaretinin z dönüşümü
10 a n u[n] -a n u[-n-1] işaretleri farklı işaretler olmasına rağmen z dönüşümleri aynı çıkmıştır. Bundan dolayı z dönüşümü ile beraber mutlaka yakınsaklık bölgesinin verilmesi gerekmektedir.
11 Z dönüşümünün özellikleri işaretinin z dönüşümü Z dönüşümünün doğrusallık özelliği ile ROC: z >0.5 ROC: z >1 Yakınsaklık bölgesi her iki bölgenin kesişimi olmaktadır.
12 işaretinin Z dönüşümü? Bu işaret işaretinin zamanda ötelenmiş halidir. işaretinin Z dönüşümü
13 Yakınsaklık bölgesi ikisinin kesişimi x[n]= 0.9 n u[n], h[n]=δ[n-2] sistem çıkışı?
14
15 Sıfır kutup gösterimi Z dönüşümünün z değişkenine bağlı iki polinomun oranı olarak şeklinde yazıldığında, bu ifadeyi 0 yapan z değerleri X(z) nin sıfırları, sonsuz yapan z değerleri X(z) nin kutuplarıdır. Yakınsaklık bölgesi kutup içeremez.
16 Sıfır kutup grafiği? Sıfırlar 0.8, -0.8 kutuplar 0.4, Imaginary Part Real Part
17 Ters Z dönüşümü Basit bir ters Z dönüşümü ifadesi yoktur. Bundan dolayı ters z dönüşümü için genelde X(z) nin bilinen dönüşüm biçimleri haline getirilmesi amaçlanır. Kısmi kesirlere açılım paydanın derecesi büyük ise z=c 1 iken A 1 elde edilir.
18 Tabloya bakıldığında iki farklı dizinin aynı z dönüşümünü verdiği görülmektedir. Ters z dönüşümünü bulabilmek için yakınsaklık bölgesinin tanımlanması gerekir. X(z) nin kutupları z=1 ve z=2 dir. Kutuplar göz önünde bulundurularak üç farklı yakınsaklık bölgesi tanımlanabilir.
19 ROC z <1 için x[n]=u[-n-1]-2 2 n u[-n-1] ROC z <1 ROC 1< z <2 için x[n]=-u[n]-2 2 n u[-n-1] ROC 1< z <2 ROC z >2 için x[n]=-u[n]+2 2 n u[n] ROC z >2
20 paydanın derecesi büyük veya eşit ise
21 Seri açılımı Z dönüşümü şeklindedir. X(z) seri şeklinde açılırsa X(z)= x[-2]z 2 + x[-1]z 1 + x[0]z 0 + x[1]z -1 + x[2]z -2 + Bu ifadenin ters z dönüşümü x[n]= x[-2]δ[n+2]+x[-1]δ[n+1]+x[0]δ[n]+x[1]δ[n-1]+x[2]δ[n-2]+ Şeklinde ötelenmiş ve ölçeklenmiş birim dürtüler şeklinde olmaktadır.
22 z >2 olduğu için x[n] işareti sağ taraflı beklenmektedir. Bu nedenle bölme işlemi ile z nin negatif üsleri elde edilir. İşaretin kaç adet örnek değeri istenirse oraya kadar bölmeye devam edilir. Bölme işlemi sonsuza kadar devam ettirilemeyeceğinden dolayı bu yöntem tam sonuç vermemektedir. İşareti genel yapısı hakkında bilgi verir.
23 Z dönüşümünün uygulamaları Fark denklemlerinde kullanılması y[n]-0.2y[n-1]-0.03y[n-2]=0.2x[n]-0.3x[n-1] şeklinde tanımlanan sistemin x[n]=u[n] girişine cevabı?
24 Tek yanlı Z dönüşümünün kullanılması Fark denklemi çift yanlı Z dönüşümü ile bulunduğunda durağan başlangıç koşulları varsayılmaktadır. Fark denkleminin başlangıç koşulları varsa tek yanlı Z dönüşümü kullanılır. y[n]-0.2y[n-1]-0.03y[n-2]=0.2x[n]-0.3x[n-1], y[-2]=2 ve y[-1]=1 şeklinde tanımlanan sistemin x[n]=u[n] girişine cevabı?
25
26 Transfer fonksiyonunun bulunması y[n]-y[n-1]=x[n]+2x[n-1] transfer fonksiyonu? Sistemin transfer fonksiyonunun ters Z dönüşümü sistemin dürtü yanıtını vermektedir. Yakınsaklık bölgesi belirtilmediğinde birden fazla ters Z dönüşümü elde edilebilir. Sabit katsayılı fark denklemi tek başına dürtü yanıtını belirlemekte yeterli değildir. Yakınsaklık bölgesi bildirilmediğinde tek bilgi yakınsaklık bölgesinin kutup içermeyeceği ve sınırların kutuplar ile belirleneceğidir. Sistemin kararlılık ve nedensellik özelliği bilinirse yakınsaklık bölgesi bulunabilir. Nedensellik: h[n] sağ taraflı dizi olmalıdır. H(z) nin yakınsaklık bölgesi en dış kutuptan dışarı olmalıdır. Kararlılık: h[n] mutlak toplanabilir olmalıdır. H(z) nin yakınsaklık bölgesi birim çemberi kapsamalıdır. Nedensel ve kararlı sistemler: H(z) nin yakınsaklık bölgesi hem birim çemberi kapsamalıdır hem de en dış kutuptan dışarı olmalıdır. Dolayısıyla sistemin tüm kutupları birim çember içerisinde olmalıdır.
27 y[n]-4.5y[n-1]+2y[n-2]=x[n] sistemin transfer fonksiyonu? Sistemin z=0.5 ve z=4 te iki kutbu z=0 da iki sıfırı var Imaginary Part Real Part
28 Transfer fonksiyonunun birim çember dışında bir kutbu olduğu için sistem hem nedensel hem kararlı olamaz. Sistem nedensel olsa yakınsaklık bölgesi en dış kutuptan dışarı doğrudur. ROC: z >4 için dürtü yanıtı h[n]= n u[n] n u[n] Sistem kararlı olsa yakınsaklık bölgesi birim çemberi kapsar. ROC: 0.5< z <4 için dürtü yanıtı h[n]= n u[-n-1] n u[n]
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Sayısal Filtre Tasarımı
 Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
Ayrık-zamanlı sistemlerin analizi z-dönüşümünün kullanılmasıyla basitleşir. Gerçekten de fark-denklemleriyle gösterilen sistem modeli
 Bölüm 3 z-dönüşümü 6 Bölüm 3. z-dönüşümü 3.1 GİRİŞ Ayrık-zamanlı sistemlerin analizi z-dönüşümünün kullanılmasıyla basitleşir. Gerçekten de fark-denklemleriyle gösterilen sistem modeli z-dönüşümü ile üzerindeü-ze-rin-de
Bölüm 3 z-dönüşümü 6 Bölüm 3. z-dönüşümü 3.1 GİRİŞ Ayrık-zamanlı sistemlerin analizi z-dönüşümünün kullanılmasıyla basitleşir. Gerçekten de fark-denklemleriyle gösterilen sistem modeli z-dönüşümü ile üzerindeü-ze-rin-de
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
MATEMATİK ÖĞRETMENLİK ALAN BİLGİSİ - DENEME SINAVI DENEME. Diğer sayfaya geçiniz.
 MATEMATİK. DENEME ÖĞRETMENLİK ALAN BİLGİSİ - DENEME SINAVI. f : X tanımlı y = f() fonksiyonu için lim f ( ) = L ise aşağıdaki önermelerden kaç tanesi kesinlikle doğrudur? 0 I. X dir. 0 II. f() fonksiyonu
MATEMATİK. DENEME ÖĞRETMENLİK ALAN BİLGİSİ - DENEME SINAVI. f : X tanımlı y = f() fonksiyonu için lim f ( ) = L ise aşağıdaki önermelerden kaç tanesi kesinlikle doğrudur? 0 I. X dir. 0 II. f() fonksiyonu
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
biçimindeki ifadelere iki değişkenli polinomlar denir. Bu polinomda aynı terimdeki değişkenlerin üsleri toplamından en büyük olanına polinomun dereces
 TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
TANIM n bir doğal sayı ve a 0, a 1, a 2,..., a n 1, a n birer gerçel sayı olmak üzere, P(x) = a 0 + a 1 x + a 2 x 2 +... + a n 1 x n 1 +a n x n biçimindeki ifadelere x değişkenine bağlı, gerçel (reel)
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ayrık-Zaman Sistemler
 Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
Deney 5 : Ayrık Filtre Tasarımı. Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç
 İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
1.DERECEDEN DENKLEMLER. (Bu belgenin güncellenmiş halini bu adresten indirebilirsiniz)
") .DERECEDEN DENKLEMLER Rüstem YILMAZ 546 550 86 48 destek@sinavdestek.com www.sinavdestek.com (Bu belgenin güncellenmiş halini bu adresten indirebilirsiniz) JET Yayınları 8 Ağustos 07 0. Bir Bilinmeyenli
.DERECEDEN DENKLEMLER Rüstem YILMAZ 546 550 86 48 destek@sinavdestek.com www.sinavdestek.com (Bu belgenin güncellenmiş halini bu adresten indirebilirsiniz) JET Yayınları 8 Ağustos 07 0. Bir Bilinmeyenli
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ KAZANIM NO KAZANIMLAR
 2013-2014 PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 12 32173 Üslü İfadeler 2 13 42016 Rasyonel ifade kavramını örneklerle açıklar ve
2013-2014 PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 12 32173 Üslü İfadeler 2 13 42016 Rasyonel ifade kavramını örneklerle açıklar ve
EĞİTİM - ÖĞRETİM YILI 10. SINIF MATEMATİK DERSİ DESTEKLEME VE YETİŞTİRME KURSU KAZANIMLARI VE TESTLERİ
 EKİM 07-08 EĞİTİM - ÖĞRETİM YILI 0. SINIF MATEMATİK DERSİ 0... Olayların gerçekleşme sayısını toplama ve çarpma prensiplerini kullanarak hesaplar. 0... Sınırsız sayıda tekrarlayan nesnelerin dizilişlerini
EKİM 07-08 EĞİTİM - ÖĞRETİM YILI 0. SINIF MATEMATİK DERSİ 0... Olayların gerçekleşme sayısını toplama ve çarpma prensiplerini kullanarak hesaplar. 0... Sınırsız sayıda tekrarlayan nesnelerin dizilişlerini
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Örnek. Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız.
 Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
8. SINIF MATEMATiK KAREKÖKLÜ SAYILAR
 0 8. SINIF MATEMATiK KAREKÖKLÜ SAYILAR KAREKÖKLÜ SAYI KAVRAMI Karekök ile gösterilir. karekökünün içi negatif bir sayıya eşit olamaz. ÖR: Aşağıda verilen eşitliklere göre x lerin alabileceği değerleri
0 8. SINIF MATEMATiK KAREKÖKLÜ SAYILAR KAREKÖKLÜ SAYI KAVRAMI Karekök ile gösterilir. karekökünün içi negatif bir sayıya eşit olamaz. ÖR: Aşağıda verilen eşitliklere göre x lerin alabileceği değerleri
ANADOLU ÜNİVERSİTESİ AÇIKÖĞRETİM FAKÜLTESİ İLKÖĞRETİM ÖĞRETMENLİĞİ LİSANS TAMAMLAMA PROGRAMI. Analiz. Cilt 2. Ünite 8-14
 ANADOLU ÜNİVERSİTESİ AÇIKÖĞRETİM FAKÜLTESİ İLKÖĞRETİM ÖĞRETMENLİĞİ LİSANS TAMAMLAMA PROGRAMI Analiz Cilt 2 Ünite 8-14 T.C. ANADOLU ÜNİVERSİTESİ YAYINLARI NO: 1082 AÇIKÖĞRETİM FAKÜLTESİ YAYINLARI NO: 600
ANADOLU ÜNİVERSİTESİ AÇIKÖĞRETİM FAKÜLTESİ İLKÖĞRETİM ÖĞRETMENLİĞİ LİSANS TAMAMLAMA PROGRAMI Analiz Cilt 2 Ünite 8-14 T.C. ANADOLU ÜNİVERSİTESİ YAYINLARI NO: 1082 AÇIKÖĞRETİM FAKÜLTESİ YAYINLARI NO: 600
Ders 6: Sürekli Olasılık Dağılımları
 Ders 6: Sürekli Olasılık Dağılımları Normal Dağılım Standart Normal Dağılım Binom Dağılımına Normal Yaklaşım Düzgün (uniform) Dağılım Üstel Dağılım Dağılımlar arası ilişkiler Bir rastgele değişkenin, normal
Ders 6: Sürekli Olasılık Dağılımları Normal Dağılım Standart Normal Dağılım Binom Dağılımına Normal Yaklaşım Düzgün (uniform) Dağılım Üstel Dağılım Dağılımlar arası ilişkiler Bir rastgele değişkenin, normal
MAK1010 MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI
 .. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
.. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
13. 2x y + z = 3 E) 1. (Cevap B) 14. Dikdörtgen biçimindeki bir tarlanın boyu 10 metre, eni 5 metre. Çözüm Yayınları
 1. (Cevap B) 14. Dikdörtgen biçimindeki bir tarlanın boyu 10 metre, eni 5 metre. Çözüm Yayınları") Doğrusal Denklem Sistemlerinin Çözümleri BÖLÜM 04 Test 0. y = y = 6 denklem sisteminin çözüm kümesi aşağıdakilerden A) {(, 4)} B) {(, )} C) {(, 4)} D) {( 4, )} E) {(, )}./ y = / y = 6 5 = 5 = = için y
Doğrusal Denklem Sistemlerinin Çözümleri BÖLÜM 04 Test 0. y = y = 6 denklem sisteminin çözüm kümesi aşağıdakilerden A) {(, 4)} B) {(, )} C) {(, 4)} D) {( 4, )} E) {(, )}./ y = / y = 6 5 = 5 = = için y
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
7.2 Fonksiyon ve Fonksiyon Tanımları (I) Fonksiyon ve Fonksiyon Tanımları (II)
 Fonksiyon ve Fonksiyon Tanımları (II)") 7.2 Fonksiyon ve Fonksiyon Tanımları (I) Tanım kümesindeki her elemanın değer kümesinde bir ve yalnız bir görüntüsü varsa, tanım kümesinden değer kümesine olan bağıntıya fonksiyon denir. Fonksiyonu f ile
7.2 Fonksiyon ve Fonksiyon Tanımları (I) Tanım kümesindeki her elemanın değer kümesinde bir ve yalnız bir görüntüsü varsa, tanım kümesinden değer kümesine olan bağıntıya fonksiyon denir. Fonksiyonu f ile
13.Konu Reel sayılar
 13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
(m+2) +5<0. 7/m+3 + EŞİTSİZLİKLER A. TANIM
 +5<0. 7/m+3 + EŞİTSİZLİKLER A. TANIM") EŞİTSİZLİKLER A. TANIM f(x)>0, f(x) - eşitsizliğinin
EŞİTSİZLİKLER A. TANIM f(x)>0, f(x) - eşitsizliğinin
CEVAP ANAHTARI. Tempo Testi D 2-B 3-A 4-A 5-C 6-B 7-B 8-C 9-B 10-D 11-C 12-D 13-C 14-C
 01. BÖLÜM: FONKSİYONLARLA İLGİLİ UYGULAMALAR - 1 1-E 2-D 3-C 4-E 5-B 6-C 7-C 8-B 9-C 10-D 11-C - 2 1-D 2-E 3-C 4-D 5-E 6-E 7-C 8-D 9-E 10-B - 3 1-E 2-A 3-B 4-D 5-A 6-E 7-E 8-C 9-C 10-C 11-C 1-A 2-B 3-E
01. BÖLÜM: FONKSİYONLARLA İLGİLİ UYGULAMALAR - 1 1-E 2-D 3-C 4-E 5-B 6-C 7-C 8-B 9-C 10-D 11-C - 2 1-D 2-E 3-C 4-D 5-E 6-E 7-C 8-D 9-E 10-B - 3 1-E 2-A 3-B 4-D 5-A 6-E 7-E 8-C 9-C 10-C 11-C 1-A 2-B 3-E
28/04/2014 tarihli LYS-1 Matematik-Geometri Testi konu analizi SORU NO LYS 1 MATEMATİK TESTİ KAZANIM NO KAZANIMLAR 1 / 31
 SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 11 32159 Rasyonel sayı kavramını açıklar. 2 12 32151 İki ya da daha çok doğal sayının en büyük ortak bölenini ve en küçük ortak katını bulur.
SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 11 32159 Rasyonel sayı kavramını açıklar. 2 12 32151 İki ya da daha çok doğal sayının en büyük ortak bölenini ve en küçük ortak katını bulur.
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
1.BÖLÜM SORU SORU. (x 1) (x 3) = A + B. x 3 ise, d(p(x)) ve d(q(x)) polinomlar n derecelerini göstermek. A. B çarp m kaçt r?
 (x 3) = A + B. x 3 ise, d(p(x)) ve d(q(x)) polinomlar n derecelerini göstermek. A. B çarp m kaçt r?") 1.BÖLÜM MATEMAT K Derginin bu say s nda Polinomlar konusunda çözümlü sorular yer almaktad r. Bu konuda, ÖSS de ç kan sorular n çözümü için gerekli temel bilgileri ve pratik yollar, sorular m z n çözümü
1.BÖLÜM MATEMAT K Derginin bu say s nda Polinomlar konusunda çözümlü sorular yer almaktad r. Bu konuda, ÖSS de ç kan sorular n çözümü için gerekli temel bilgileri ve pratik yollar, sorular m z n çözümü
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") 1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A
 T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Çözümlü Limit ve Süreklilik Problemleri
 Bölüm 5 Çözümlü Limit Süreklilik Problemleri. 2 fonksiyonunun tanım bölgesini = noktasındaki itini bulunuz. Paydanın 0 değerini aldığı = noktasında fonksiyon tanımlı değldir. Tanım bölgesini T (f ) ile
Bölüm 5 Çözümlü Limit Süreklilik Problemleri. 2 fonksiyonunun tanım bölgesini = noktasındaki itini bulunuz. Paydanın 0 değerini aldığı = noktasında fonksiyon tanımlı değldir. Tanım bölgesini T (f ) ile
İÇİNDEKİLER BASİT EŞİTSİZLİKLER. HARFLİ İFADELER Harfli İfadeler ve Elemanları Eşitsizlik Sembolleri ve İşaretin Eşitsizlik İfadesi...
 İÇİNDEKİLER HARFLİ İFADELER Harfli İfadeler ve Elemanları... 1 Benzer Terim... Harfli İfadenin Terimlerini Toplayıp Çıkarma... Harfli İfadelerin Terimlerini Çarpma... Harfli İfadelerde Parantez Açma...
İÇİNDEKİLER HARFLİ İFADELER Harfli İfadeler ve Elemanları... 1 Benzer Terim... Harfli İfadenin Terimlerini Toplayıp Çıkarma... Harfli İfadelerin Terimlerini Çarpma... Harfli İfadelerde Parantez Açma...
Örnek...3 : Aşağıdaki ifadelerden hangileri bir dizinin genel terim i olabilir?
 DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler, değer kümelerine göre adlandırı - lırlar. Dizinin değer
DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler, değer kümelerine göre adlandırı - lırlar. Dizinin değer
( ) (0) ( ) (2 )... ( )...
 (0) ( ) (2 )... ( )...") Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ders 10: Düzlemde cebirsel eğriler
 Ders 10: Düzlemde cebirsel eğriler İzdüşümsel geometride bir doğruyu derecesi 1 olan homojen bir polinomun sıfırları kümesi olarak tarif ettik. Bir kuadrik, derecesi 2 olan homojen bir polinomla anlatılıyordu
Ders 10: Düzlemde cebirsel eğriler İzdüşümsel geometride bir doğruyu derecesi 1 olan homojen bir polinomun sıfırları kümesi olarak tarif ettik. Bir kuadrik, derecesi 2 olan homojen bir polinomla anlatılıyordu
Lineer Dönüşümler ÜNİTE. Amaçlar. İçindekiler. Yazar Öğr. Grv.Dr. Nevin ORHUN
 Lineer Dönüşümler Yazar Öğr. Grv.Dr. Nevin ORHUN ÜNİTE 7 Amaçlar Bu üniteyi çalıştıktan sonra; Vektör uzayları arasında tanımlanan belli fonksiyonları tanıyacak, özelliklerini öğrenecek, Bir dönüşümün,
Lineer Dönüşümler Yazar Öğr. Grv.Dr. Nevin ORHUN ÜNİTE 7 Amaçlar Bu üniteyi çalıştıktan sonra; Vektör uzayları arasında tanımlanan belli fonksiyonları tanıyacak, özelliklerini öğrenecek, Bir dönüşümün,
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
TEKİRDAĞ SOSYAL BİLİMLER LİSESİ 10. SINIF MATEMATİK DERSİ YILLIK PLANI
 9 Eylül- Eylül 0-07 TEKİRDAĞ SOSYAL BİLİMLER LİSESİ 0. SINIF MATEMATİK DERSİ YILLIK PLANI Veri, Sayma ve Sayma. Olayların gerçekleşme sayısını toplama ve çarpma prensiplerini kullanarak hesaplar. Sıralama
9 Eylül- Eylül 0-07 TEKİRDAĞ SOSYAL BİLİMLER LİSESİ 0. SINIF MATEMATİK DERSİ YILLIK PLANI Veri, Sayma ve Sayma. Olayların gerçekleşme sayısını toplama ve çarpma prensiplerini kullanarak hesaplar. Sıralama
Mustafa Özdemir İrtibat İçin : veya Altın Nokta Yayınevi
 2 Matematik Olimpiyatlarına Hazırlık 4 Mustafa Özdemir MATEMATİK OLİMPİYATLARINA HAZIRLIK 4 (336 sayfa) ANALİZ CEBİR 1 TANITIM DÖKÜMANI (Kitabın içeriği hakkında bir bilgi verilmesi amacıyla bu döküman
2 Matematik Olimpiyatlarına Hazırlık 4 Mustafa Özdemir MATEMATİK OLİMPİYATLARINA HAZIRLIK 4 (336 sayfa) ANALİZ CEBİR 1 TANITIM DÖKÜMANI (Kitabın içeriği hakkında bir bilgi verilmesi amacıyla bu döküman
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
12-A. Sayılar - 1 TEST
 -A TEST Sayılar -. Birbirinden farklı beş pozitif tam sayının toplamı 0 dur. Bu sayılardan sadece ikisi den büyüktür. Bu sayılardan üç tanesi çift sayıdır. Buna göre bu sayılardan en büyüğü en çok kaç
-A TEST Sayılar -. Birbirinden farklı beş pozitif tam sayının toplamı 0 dur. Bu sayılardan sadece ikisi den büyüktür. Bu sayılardan üç tanesi çift sayıdır. Buna göre bu sayılardan en büyüğü en çok kaç
Alıştırmalar 1. 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.
 Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz.") Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
Alıştırmalar 1 1) Aşağıdaki diferansiyel denklemlerin mertebesini ve derecesini bulunuz. Bağımlı ve bağımsız değişkenleri belirtiniz. Denklem Mertebe Derece a) 2 1 ( ) 4 6 c) 2 1 d) 2 2 e) 3 1 f) 2 4 g)
LĐMĐT ÖSS ÖYS YILLAR SAĞDAN VE SOLDAN LĐMĐT. ÇÖZÜM: x=2 f(x) de yerine yazılır cevap:7
 de yerine yazılır cevap:7") YILLAR 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 ÖSS ÖYS LĐMĐT Tanım : Bir x0 A = [ a,b ] alalım, f: A R ye veya f: A - { x 0 } R ye bir fonksiyon olsun. Terimleri A - { x 0 } kümesine ait ve x
YILLAR 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 ÖSS ÖYS LĐMĐT Tanım : Bir x0 A = [ a,b ] alalım, f: A R ye veya f: A - { x 0 } R ye bir fonksiyon olsun. Terimleri A - { x 0 } kümesine ait ve x
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
Cebir Notları. Gökhan DEMĐR, ÖRNEK : A ve A x A nın bir alt kümesinden A ya her fonksiyona
 , 2006 MC Cebir Notları Gökhan DEMĐR, gdemir23@yahoo.com.tr Đşlem ĐŞLEM A ve A x A nın bir alt kümesinden A ya her fonksiyona ikili işlem denir. Örneğin toplama, çıkarma, çarpma birer işlemdir. Đşlemler
, 2006 MC Cebir Notları Gökhan DEMĐR, gdemir23@yahoo.com.tr Đşlem ĐŞLEM A ve A x A nın bir alt kümesinden A ya her fonksiyona ikili işlem denir. Örneğin toplama, çıkarma, çarpma birer işlemdir. Đşlemler
Sunum ve Sistematik. Bu başlıklar altında uygulamalar yaparak öğrenciye yorum, analiz, sentez yetisinin geliştirilmesi hedeflenmiştir.
 Sunum ve Sistematik 1. BÖLÜM: POLİNOMLAR ALIŞTIRMALAR Bu başlık altında her bölüm kazanımlara ayrılmış, kazanımlar tek tek çözümlü temel alıştırmalar ve sorular ile taranmıştır. Özellikle bu kısmın sınıf
Sunum ve Sistematik 1. BÖLÜM: POLİNOMLAR ALIŞTIRMALAR Bu başlık altında her bölüm kazanımlara ayrılmış, kazanımlar tek tek çözümlü temel alıştırmalar ve sorular ile taranmıştır. Özellikle bu kısmın sınıf
Türev Uygulamaları ÜNİTE. Amaçlar. İçindekiler. Yazar Prof.Dr. Vakıf CAFEROV
 Türev Uygulamaları Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 10 Amaçlar Bu üniteyi çalıştıktan sonra; türev kavramı yardımı ile fonksiyonun monotonluğunu, ekstremum noktalarını, konvekslik ve konkavlığını, büküm
Türev Uygulamaları Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 10 Amaçlar Bu üniteyi çalıştıktan sonra; türev kavramı yardımı ile fonksiyonun monotonluğunu, ekstremum noktalarını, konvekslik ve konkavlığını, büküm
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
Değişken içeren ve değişkenlerin belli değerleri için doğru olan cebirsel eşitliklere denklem denir.
 1 DENKLEMLER: Değişken içeren ve değişkenlerin belli değerleri için doğru olan cebirsel eşitliklere denklem denir. Bir denklemde eşitliği sağlayan(doğrulayan) değerlere; verilen denklemin kökleri veya
1 DENKLEMLER: Değişken içeren ve değişkenlerin belli değerleri için doğru olan cebirsel eşitliklere denklem denir. Bir denklemde eşitliği sağlayan(doğrulayan) değerlere; verilen denklemin kökleri veya
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
SAYILAR SAYI KÜMELERİ
 SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif tamsayılar
SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif tamsayılar
SAYILAR SAYI KÜMELERİ
 1 SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif
1 SAYILAR SAYI KÜMELERİ 1.Sayma Sayıları Kümesi: S=N =1,2,3,... 2. Doğal Sayılar Kümesi : N=0,1,2,... 3. Tamsayılar Kümesi : Z=..., 2, 1,0,1,2,... Sıfırın sağında bulunan 1,2,3,. tamsayılarına pozitif
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
1. Fonksiyonlar Artan, Azalan ve Sabit Fonksiyon Alıştırmalar Çift ve Tek Fonksiyon
 İçindekiler Cebir 1. Fonksiyonlar....... 1.1 Fonksiyonların Tanım, Değer ve Görüntü Kümesi...... 1.1.1 Fonksiyon.. 1.1. Görüntü Kümesi... 1.1.3 Eşit Fonksiyonlar. 1.1.4 Fonksiyonun Gösterimi. 1.1.4.1 Liste
İçindekiler Cebir 1. Fonksiyonlar....... 1.1 Fonksiyonların Tanım, Değer ve Görüntü Kümesi...... 1.1.1 Fonksiyon.. 1.1. Görüntü Kümesi... 1.1.3 Eşit Fonksiyonlar. 1.1.4 Fonksiyonun Gösterimi. 1.1.4.1 Liste
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
Mustafa Sezer PEHLİVAN. Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü
 * Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü SAYILAR Doğal Sayılar, Tam Sayılar, Rasyonel Sayılar, N={0,1,2,3,,n, } Z={,-3,-2,-1,0,1,2,3, } Q={p/q: p,q Z ve q 0} İrrasyonel Sayılar, I= {p/q
* Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü SAYILAR Doğal Sayılar, Tam Sayılar, Rasyonel Sayılar, N={0,1,2,3,,n, } Z={,-3,-2,-1,0,1,2,3, } Q={p/q: p,q Z ve q 0} İrrasyonel Sayılar, I= {p/q
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Sayısal Kontrol - HAVA HARP OKULU
 Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ. Haftalık Ders Planı
 Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
FEN FAKÜLTESİ MATEMATİK BÖLÜMÜ YAZ OKULU DERS İÇERİGİ. Bölümü Dersin Kodu ve Adı T P K AKTS
 Bir Dönemde Okutulan Ders Saati MAT101 Genel I (Mühendislik Fakültesi Bütün Bölümler, Fen Fakültesi Kimya ve Astronomi Bölümleri) 1 Kümeler, reel sayılar, bir denklem veya eşitsizliğin grafiği 2 Fonksiyonlar,
Bir Dönemde Okutulan Ders Saati MAT101 Genel I (Mühendislik Fakültesi Bütün Bölümler, Fen Fakültesi Kimya ve Astronomi Bölümleri) 1 Kümeler, reel sayılar, bir denklem veya eşitsizliğin grafiği 2 Fonksiyonlar,
12-B. Polinomlar - 1 TEST. olduğuna göre P(x - 2, y + 4) polinomunun katsayılar toplamı kaçtır? olduğuna göre A B kaçtır? A) 78 B) 73 C) 62 D 58 E) 33
 polinomunun katsayılar toplamı kaçtır? olduğuna göre A B kaçtır? A) 78 B) 73 C) 62 D 58 E) 33") -B TEST Polinomlar -. Py _, i= y- y + 5y- olduğuna göre P( -, y + ) polinomunun katsayılar toplamı. - 6 = A - 5 + - + B - olduğuna göre A B 78 B) 7 6 D 58 E) B) D) - E) -. -a- b = _ + -5i_ -ci eşitliğine
-B TEST Polinomlar -. Py _, i= y- y + 5y- olduğuna göre P( -, y + ) polinomunun katsayılar toplamı. - 6 = A - 5 + - + B - olduğuna göre A B 78 B) 7 6 D 58 E) B) D) - E) -. -a- b = _ + -5i_ -ci eşitliğine
Örnek...3 : Aşağıdaki ifadelerden hangileri bir dizinin genel terim i olabilir? Örnek...4 : Genel terimi w n. Örnek...1 : Örnek...5 : Genel terimi r n
 DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler değer kümelerine göre adlandırılırlar. Dizinin değer kümesi
DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler değer kümelerine göre adlandırılırlar. Dizinin değer kümesi
Değişken Katsayılı Adi Diferensiyel Denklemler Katsayıları bağımsız(x) değişkene bağlı diferensiyel denklemlerdir. Genel ifadesi şöyledir.
 değişkene bağlı diferensiyel denklemlerdir. Genel ifadesi şöyledir.") 3. Yüksek Mertebeden Adi Diferansiyel Denklemler Geçmiş konularda şu ana kadar ele alınan 1.mertebe-1.dereceden adi diferensiyel denklemler ancak 1.mertebe seviyesindeki belirli problemleri ifade edebilmektedir.
3. Yüksek Mertebeden Adi Diferansiyel Denklemler Geçmiş konularda şu ana kadar ele alınan 1.mertebe-1.dereceden adi diferensiyel denklemler ancak 1.mertebe seviyesindeki belirli problemleri ifade edebilmektedir.
fonksiyonunun [-1,1] arasındaki grafiği hesaba katılırsa bulunan sonucun
![fonksiyonunun [-1,1] arasındaki grafiği hesaba katılırsa bulunan sonucun](/thumbs/31/15329792.jpg "fonksiyonunun [-1,1] arasındaki grafiği hesaba katılırsa bulunan sonucun") . UŞAK FEN EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ ANALİZ II FİNAL SORULARI ÇÖZÜMLERİ d belirli integralinin aşağıdaki çözümünün doğru olup olmadığını belirtiniz. Eğer çözüm yanlış ise sebebini açıklayınız.
. UŞAK FEN EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ ANALİZ II FİNAL SORULARI ÇÖZÜMLERİ d belirli integralinin aşağıdaki çözümünün doğru olup olmadığını belirtiniz. Eğer çözüm yanlış ise sebebini açıklayınız.
Üstel ve Logaritmik Fonksiyonlar
 Üstel ve Logaritmik Fonksiyonlar Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 5 Amaçlar Bu üniteyi çalıştıktan sonra; üstel ve logaritmik fonksiyonları tanıyacak, üstel ve logaritmik fonksiyonların grafiklerini
Üstel ve Logaritmik Fonksiyonlar Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 5 Amaçlar Bu üniteyi çalıştıktan sonra; üstel ve logaritmik fonksiyonları tanıyacak, üstel ve logaritmik fonksiyonların grafiklerini
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
POLİNOMLARIN TANIMI. ÖĞRENCİNİN ADI SOYADI: KONU: POLİNOMLAR NUMARASI: SINIFI:
 ÖĞRENCİNİN ADI SOYADI: Dersin Adı POLİNOMLARIN TANIMI 1. Aşağıdaki fonksiyonlardan polinom belirtir? I. Dersin Konusu 1 5. P x x n 1 7 x 4 n 5 ifadesi bir polinom belirttiğine göre, bu polinomun derecesi
ÖĞRENCİNİN ADI SOYADI: Dersin Adı POLİNOMLARIN TANIMI 1. Aşağıdaki fonksiyonlardan polinom belirtir? I. Dersin Konusu 1 5. P x x n 1 7 x 4 n 5 ifadesi bir polinom belirttiğine göre, bu polinomun derecesi
10 SINIF MATEMATİK. Polinomlar Çarpanlara Ayırma İkinci Dereceden Bir Bilinmeyenli Denklemler
 10 SINIF MATEMATİK Polinomlar Çarpanlara Ayırma İkinci Dereceden Bir Bilinmeyenli Denklemler YAYIN KOORDİNATÖRÜ Oğuz GÜMÜŞ EDİTÖR Hazal ÖZNAR - Uğurcan AYDIN DİZGİ Muhammed KARATAŞ SAYFA TASARIM - KAPAK
10 SINIF MATEMATİK Polinomlar Çarpanlara Ayırma İkinci Dereceden Bir Bilinmeyenli Denklemler YAYIN KOORDİNATÖRÜ Oğuz GÜMÜŞ EDİTÖR Hazal ÖZNAR - Uğurcan AYDIN DİZGİ Muhammed KARATAŞ SAYFA TASARIM - KAPAK
AYRIK-ZAMANLI DOĞRUSAL
 Bölüm 2 AYRIK-ZAMANLI DOĞRUSAL ZAMANLA-DEĞİŞMEYEN SİSTEMLER 4 Bölüm 2. Ayrık-Zamanlı Doğrusal Zamanla-Değişmeyen Sistemler Pek çok fiziksel sistem doğrusal zamanla-değişmeyen (Linear Time Invariant - DZD)
Bölüm 2 AYRIK-ZAMANLI DOĞRUSAL ZAMANLA-DEĞİŞMEYEN SİSTEMLER 4 Bölüm 2. Ayrık-Zamanlı Doğrusal Zamanla-Değişmeyen Sistemler Pek çok fiziksel sistem doğrusal zamanla-değişmeyen (Linear Time Invariant - DZD)
Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma TEST D 9. E 10. C 11. B 14. D 16. D 12. C 12. A 13. B 14.
 1. Ünite: Polinomlar Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Polinomlarda Bölme, Bölüm ve Kalan Bulma 1 1 1 1 1 1 1 1 1
1. Ünite: Polinomlar Polinomlar, Temel Kavramlar, Polinomlar Kümesinde Toplama, Çıkarma, Çarpma 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Polinomlarda Bölme, Bölüm ve Kalan Bulma 1 1 1 1 1 1 1 1 1
ÖSYM. 1. Bu testte 40 soru vardır. 2. Cevaplarınızı, cevap kâğıdının Matematik Testi için ayrılan kısmına işaretleyiniz AYT/Matematik
 MATEMATİK TESTİ 1. Bu testte 40 soru vardır. 2. Cevaplarınızı, cevap kâğıdının Matematik Testi için ayrılan kısmına işaretleyiniz. 1. 2. a bir gerçel sayı olmak üzere, karmaşık sayılarda eşitliği veriliyor.
MATEMATİK TESTİ 1. Bu testte 40 soru vardır. 2. Cevaplarınızı, cevap kâğıdının Matematik Testi için ayrılan kısmına işaretleyiniz. 1. 2. a bir gerçel sayı olmak üzere, karmaşık sayılarda eşitliği veriliyor.
Tanım: (1. Tip Üretken Fonksiyonlar) (a r ) = (a 1, a 2, a 3,,a r, ) sayı dizisi olmak üzere, (a r ) dizisinin 1. Tip üretken fonksiyonu
 (a r ) = (a 1, a 2, a 3,,a r, ) sayı dizisi olmak üzere, (a r ) dizisinin 1. Tip üretken fonksiyonu") Üretken Fonksiyonlar Ali İlker Bağrıaçık Üretken fonksiyonlar sayma problemlerinin çözümünde kullanılan önemli yöntemlerden biridir. Üretken fonksiyonların temeli Moivre nin 1720 yıllarındaki çalışmalarına
Üretken Fonksiyonlar Ali İlker Bağrıaçık Üretken fonksiyonlar sayma problemlerinin çözümünde kullanılan önemli yöntemlerden biridir. Üretken fonksiyonların temeli Moivre nin 1720 yıllarındaki çalışmalarına
Bekleme Hattı Teorisi
 Bekleme Hattı Teorisi Sürekli Parametreli Markov Zincirleri Tanım 1. * +, durum uzayı * +olan sürekli parametreli bir süreç olsun. Aşağıdaki özellik geçerli olduğunda bu sürece sürekli parametreli Markov
Bekleme Hattı Teorisi Sürekli Parametreli Markov Zincirleri Tanım 1. * +, durum uzayı * +olan sürekli parametreli bir süreç olsun. Aşağıdaki özellik geçerli olduğunda bu sürece sürekli parametreli Markov
EĞİTİM ÖĞRETİM YILI FEN LİSESİ 12.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLIK PLANI 12.SINIF KAZANIM VE SÜRE TABLOSU
 08-09 EĞİTİM ÖĞRETİM YILI FEN LİSESİ.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLIK PLANI.SINIF KAZANIM VE SÜRE TABLOSU No Konular Kazanım sayısı Ders Saati Ağırlık (%).. ÜSTEL VE LOGARİTMİK FONKSİYONLAR
08-09 EĞİTİM ÖĞRETİM YILI FEN LİSESİ.SINIF MATEMATİK DERSİ ÜNİTELENDİRİLMİŞ YILLIK PLANI.SINIF KAZANIM VE SÜRE TABLOSU No Konular Kazanım sayısı Ders Saati Ağırlık (%).. ÜSTEL VE LOGARİTMİK FONKSİYONLAR
LYS MATEMATİK DENEME - 1
 LYS MATEMATİK DENEME - BU SORULAR FİNAL EĞİTİM KURUMLARI TARAFINDAN SAĞLANMIŞTIR. İZİNSİZ KOPYALANMASI VE ÇOĞALTILMASI YASAKTIR, YAPILDIĞI TAKDİRDE CEZAİ İŞLEM UYGULANACAKTIR. LYS MATEMATİK TESTİ. Bu testte
LYS MATEMATİK DENEME - BU SORULAR FİNAL EĞİTİM KURUMLARI TARAFINDAN SAĞLANMIŞTIR. İZİNSİZ KOPYALANMASI VE ÇOĞALTILMASI YASAKTIR, YAPILDIĞI TAKDİRDE CEZAİ İŞLEM UYGULANACAKTIR. LYS MATEMATİK TESTİ. Bu testte
Ders İçerik Bilgisi. Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
ÖSS MATEMATİK TÜREV FASİKÜLÜ
 ÖSS MATEMATİK TÜREV FASİKÜLÜ GRAFİK ÇİZİMİ Bir fonksiyonun denklemi verilip grafiği istendiğinde aşağıdaki yolu izlemeliyiz. ) Fonksiyonun en geniş tanım kümesi bulunur. ) ± için fonksiyonun limiti bulunur.
ÖSS MATEMATİK TÜREV FASİKÜLÜ GRAFİK ÇİZİMİ Bir fonksiyonun denklemi verilip grafiği istendiğinde aşağıdaki yolu izlemeliyiz. ) Fonksiyonun en geniş tanım kümesi bulunur. ) ± için fonksiyonun limiti bulunur.
Türev Uygulamaları. 9.1 Ortalama Değer teoremi
 1 2 Bölüm 9 Türev Uygulamaları 9.1 Ortalama Değer teoremi Türevin çok farklı uygulamaları vardır. Bunlar arasında çok önemli olan bazılarını ele alacağız. Ortalama Değer Teoremi ni daha önce görmüştük.
1 2 Bölüm 9 Türev Uygulamaları 9.1 Ortalama Değer teoremi Türevin çok farklı uygulamaları vardır. Bunlar arasında çok önemli olan bazılarını ele alacağız. Ortalama Değer Teoremi ni daha önce görmüştük.
MUTLAK DEĞER Test -1
 MUTLAK DEĞER Test -. < x < olduğuna göre, x x ifadesinin eşiti aşağıdakilerden 7 B) 7 x C) x 7 D) x 7 E) 7 x 5. y < 0 < x olduğuna göre, y x x y x y ifadesinin eşiti aşağıdakilerden xy B) xy C) xy D) xy
MUTLAK DEĞER Test -. < x < olduğuna göre, x x ifadesinin eşiti aşağıdakilerden 7 B) 7 x C) x 7 D) x 7 E) 7 x 5. y < 0 < x olduğuna göre, y x x y x y ifadesinin eşiti aşağıdakilerden xy B) xy C) xy D) xy