Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
|
|
|
- Gonca Doğu
- 7 yıl önce
- İzleme sayısı:
Transkript
1 Ders # Otomatik Kontrol Laplas Dönüşümü

2 Pierre-Simon Laplace, Matematiçi ve Astronomdur.
3 LAPLAS DÖNÜŞÜMÜ Zamanla değişen bir f(t) fonksiyonunun Laplas dönüşümü İle elde edilir ve gösterimi:
4 Laplas dönüşümü, diferansiyel denklemlerin cebirsel ifadelere dönüştürülerek çözümlerinin kolayca elde eldilmesi amcıyla kullanılır. İspat: Bu dönüşümün lineer olamsı için linner olma şartlarını sağlaması gerekir; ) )
5 Lineer olmanın her iki şartını da sağladığı için Laplas dönüşümü lineer bir dönüşümdür. Bazı Önemli Fonksiyonların Laplas Dönüşümleri Örnek: İse f(t) nin Laplas dönüşümü nedir?
6 Örnek: e at f(t) nin Laplas dönüşümü nedir? (Bu ifadeye üstel öteleme de adı verilir.) Sonuç: Eğer e at f(t) nin Laplas dönüşümünü bulmak istiyorsak f(t) nin Laplas dönüşümünü alıp s yerine s-a yazmak yeterli olur. Örnek: e at nin Laplas dönüşümü nedir?
7 Örnek: e (ajb)t nin Laplas dönüşümü nedir? Örnek: Cos(at) nin Laplas dönüşümü nedir? Cos(at) nin euler dönüşümü: Benzer şekilde sin(at) nin Laplas dönüşümü: s a a s > 0
8 Adi Diferansiyel Denklemlerin Fonksiyonların Laplas Dönüşümleri ve Çözümleri
9 Örnek: İfadesinin ters Laplas dönüşümünü bulunuz.
10 Bizim örneğimizde s in yerini s- almıştır. O halde fonksiyonumuz F(s-) dir.( ) Bir fonksiyonu zaman ekseni üzerinde kaydırırsak, o fonksiyonun ötelenmiş halini elde ederiz. Fonkisyonların negatif bölgedeki değişimleri bilinmiyor olabilir.
11 Bu durumda f(t) fonksiyonunu pozitif zaman ekseni üzerinde c kadar kaydırdığımızda f(t) nin negatif zaman ekseni üzerinde c kadar davranışına ihtiyacımız ortaya çıkar. Bu kısmı bilmediğimiz için kaydırılımış fonksiyonun ilk c birimlik süresi sıfır olmalıdır. Dolayısyla bunu oluşturabilmek için f(t) fonksiyonu c kadar ötelenmiş birim basamak fonksiyonu ile çarpmamız gerekir.
12 Teorem: İspat: Örnek: İfadesinin ters Laplas dönüşümünü bulunuz.
13 NOT: 0 arasında tanımlanmış sint fonksiyonunu ele alalım. Bu fonksiyonu π/ kadar zaman ekseninde sağa doğru itelersek, Laplas değeri: Değildir. Örnek: İfadesinin Laplas dönüşümünü bulunuz.
14 Sıçramalı Fonksiyonların Laplas Dönüşümleri
15 Örnek: Fonksiyonunu çiziniz. Örnek:
16 Örnek: t n İfadesinin Laplas dönüşümünü bulunuz. Dikkat edilecek olursa t sonsuza giderken son kesirli ifadenin payı ve paydası sonsuza gitmektedir. Bu durumda L hospital kuralı uygulanırsa kesirli ifadenin payı n adımda sıfıra giderken payda sabit kalmaktadır. Sonuç sıfır olur.
17 Ters Laplas Dönüşümleri Örnek: şeklinde sembolize edilir. Kısmi kesirlere ayırma yöntemi kullanılır, böylece karmaşık ifadeler sadeleştirilerek Laplas dönüşümü bilinen ifadeler haline dönüştürülür. ifadesinin ters Laplas dönüşümünü bulunuz. Terimlerin ayrı ayrı ters dönüşümlerini alacak olursak;
18 Örnek: ifadesinin ters Laplas dönüşümünü bulunuz. Eşitliğin her iki tarafı s in bütün değerleri için eşit ise s=0 içinde eşittir. Bu durumda;
19 Örnek: ifadesinin ters Laplas dönüşümünü bulunuz. Ters Laplas Dönüşümü Hatırlama:
20 Yüksek Mertebeden Türevlerin Hesaplanması şeklinde yazılabilir. = s F( s) sf (0) f ' (0) = = 0 0 ise
21 Darbe (İmpuls) Fonksiyonu Darbe fonksiyonu sistemelerin davranışları hakkında bilgi edinmek için kullanılır. Darbe fonksiyonu, kuvvetin, gerilimin veya benzer fonksiyonların sisteme çok kısa süre içersinde çok büyük değerler alacak şekilde uygulanması ile oluşturulur. Istaka ile bilardo topuna vurmak buna örnek olabilir. Bu vuruş sonrası topun dinamik davranışı, ilk değerleri sıfır kabul edilen bir sistemin darbe yanıtı şeklinde ele alınabilir. Futbolda ise verilen bir pasa veya ortaya şut çekilmesi, vole vurulması sonrası topun dinamik davranışı, ilk değerleri sıfır olmayan bir sistemin darbe yanıtı şeklinde ele alınabilir.
22
23

24 τ 0 giderken, grafik:
25
26
27 Örnek:
28 Periyodik Fonksiyonların Laplas Dönüşümleri
29
30
31
32 Örnek: Aşağıdaki şekildeki fonksiyonun Laplas dönüşümünü bulunuz. Şekildeki fonksiyonun periyodu dir, T=.
33 Örnek:Aşağıdaki fonksiyonun ters Laplas dönüşümünü hesaplayınız
34 ve olduğundan elde edilir.
35 Ders #4 Otomatik Kontrol Fiziksel Sistemlerin Modellenmesi Elektriksel Sistemeler Mekaniksel Sistemler 6 February 007 Otomatik Kontrol
36 Kontrol sistemlerinin analizinde ve tasarımında en önemli noktalardan bir tanesi sistemlerin matematiksel ifade edilmesidir. Transfer fonksiyonu metodu ve durum değişkenleri metodu en çok kullanılan modelleme yöntemleridir.( Transfer fonksiyonu metodu sadece lineer sistemlere uygulanabilir.) 6 February 007 Otomatik Kontrol
37 6 February 007 Otomatik Kontrol 3 Başlangıç koşulları sıfır kabul edilerek bir sistemin cevap fonksiyunu (çıkışı) ile sürücü fonksiyonu (giriş) arasındaki Laplas transformasyonları oranına transfer fonksiyonu denir. Transfer Fonksiyonu: Transfer fonksiyonu sistemin dinamik karakteristiklerini tanımlar. Sistem özelliğidir. Sistemin fiziksel yapısı hakkında bilgi vermez, farklı fiziksel sistemlerin transfer fonksiyonları aynı olabilir. )... ( )... ( ) ( ) ( ) ( 0 0 a s b s a b s b s b s G s R s C n n n n m m m m = =
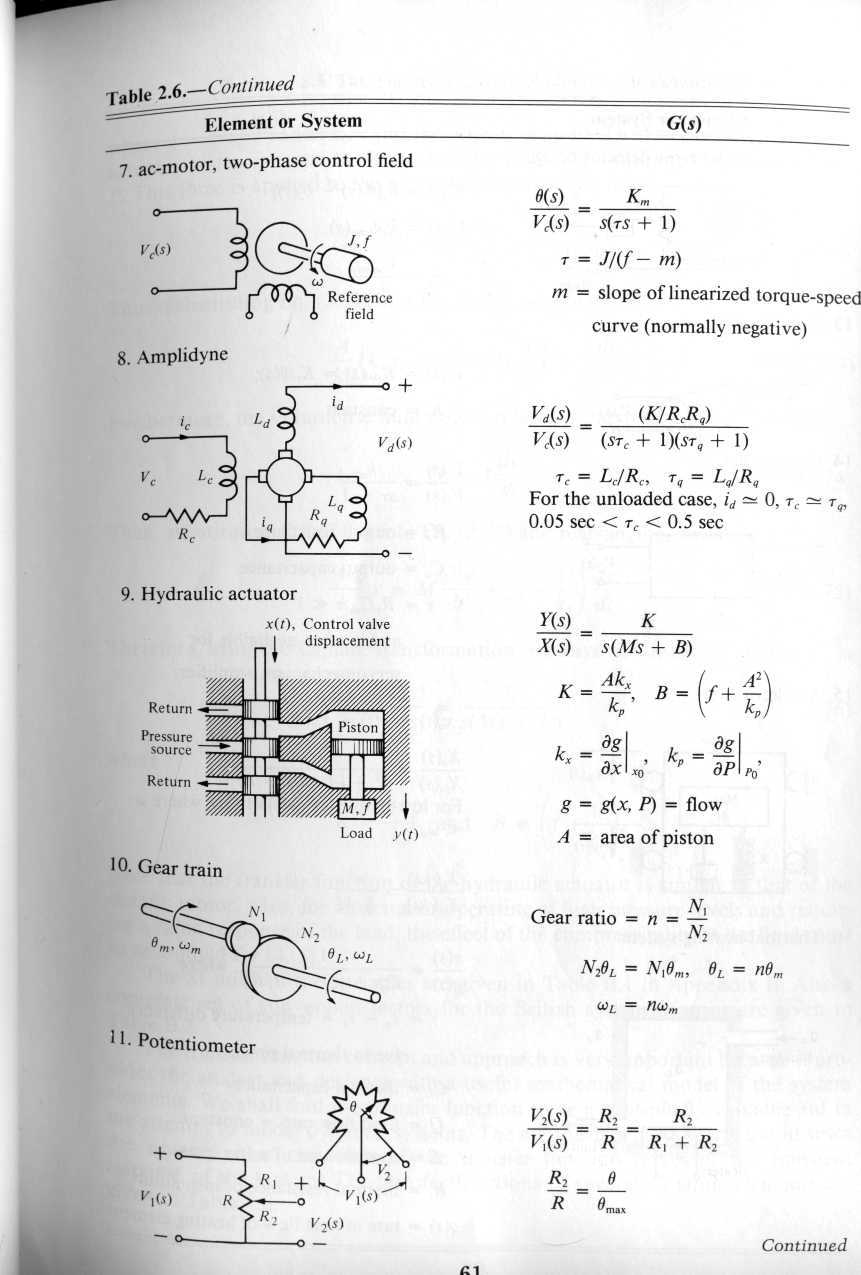
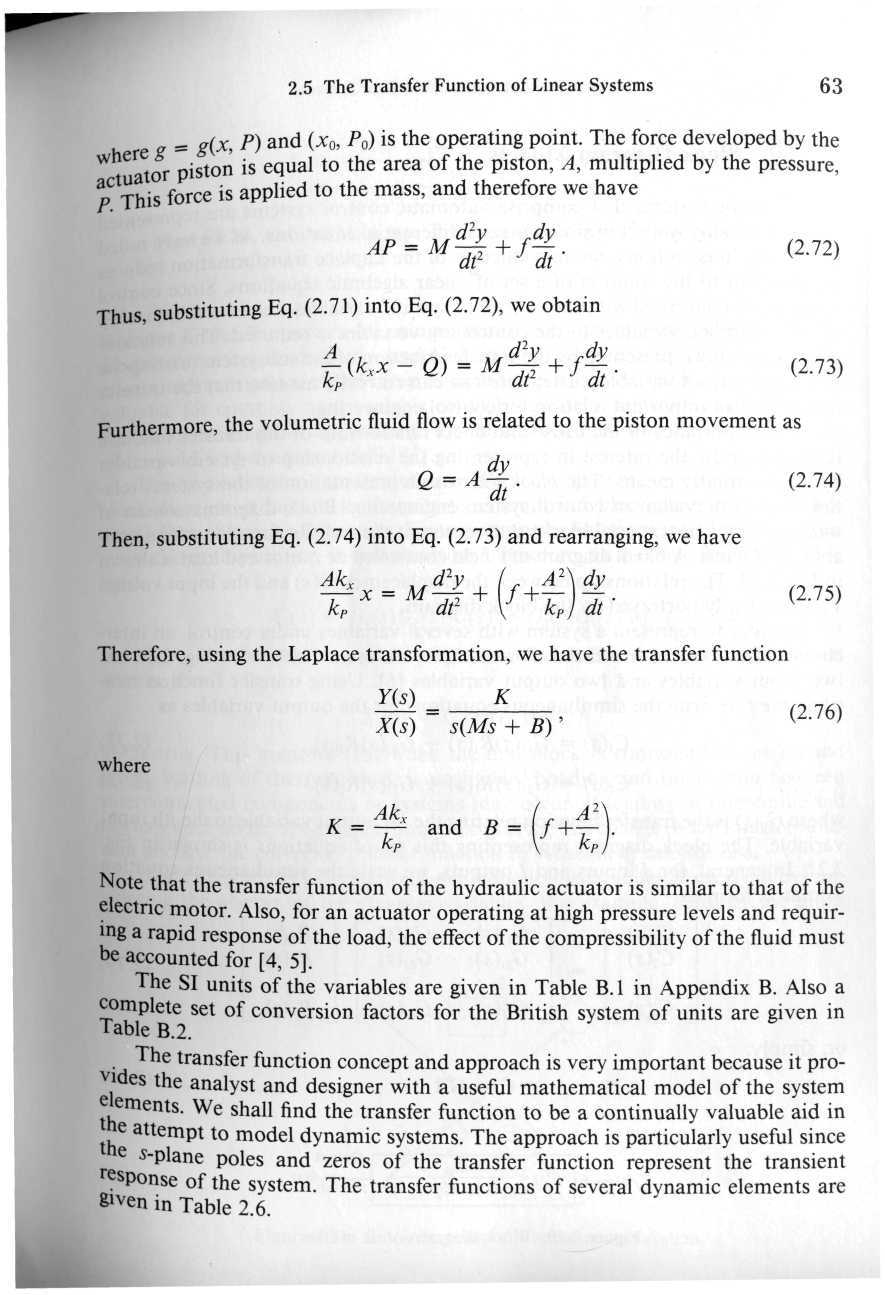
38 dx dt Örnek: x = r( t) için transfer fonksiyonunu oluşturunuz. Başlangıç koşullarını 0 kabul ederek iki tarafın Laplas dönüşümünü alalım: sx ( s) X ( s) = R( s) G ( s) = X ( s) R( s) = s 6 February 007 Otomatik Kontrol 4
39 Elektriksel Sistemlerin Transfer Fonksiyonları Elektriksel sistemlerin modellenmesinde linneer ve pasif üç devre elemanı yaygın olarak kullanılır. Direnç, Endüktans ve Kapasitans 6 February 007 Otomatik Kontrol 5
40 Kapasitör için: V ( s) = I( s) Cs Direnç için: V ( s) = RI( s) Endüktör için: V ( s) = LsI ( s) Transfer fonksiyonu tanımlayacak olursak: V ( s) I( s) = Z( s) 6 February 007 Otomatik Kontrol 6
41 Elektriksel devrelerin matematiksel modellenmesinde Kirşof yasalarından faydalanılır: Bir kapalı çevrimde gerilimlerin sıfırdır. Bir noktaya gelen ve noktadan çıkan akımların sıfırdır. Bu ilişkiler kurulduktan sonra devre için diferansiyel denklemler yazılır. Daha sonra Laplas dönüşümü yapılır ve transfer fonksiyonu elde edilir. 6 February 007 Otomatik Kontrol 7
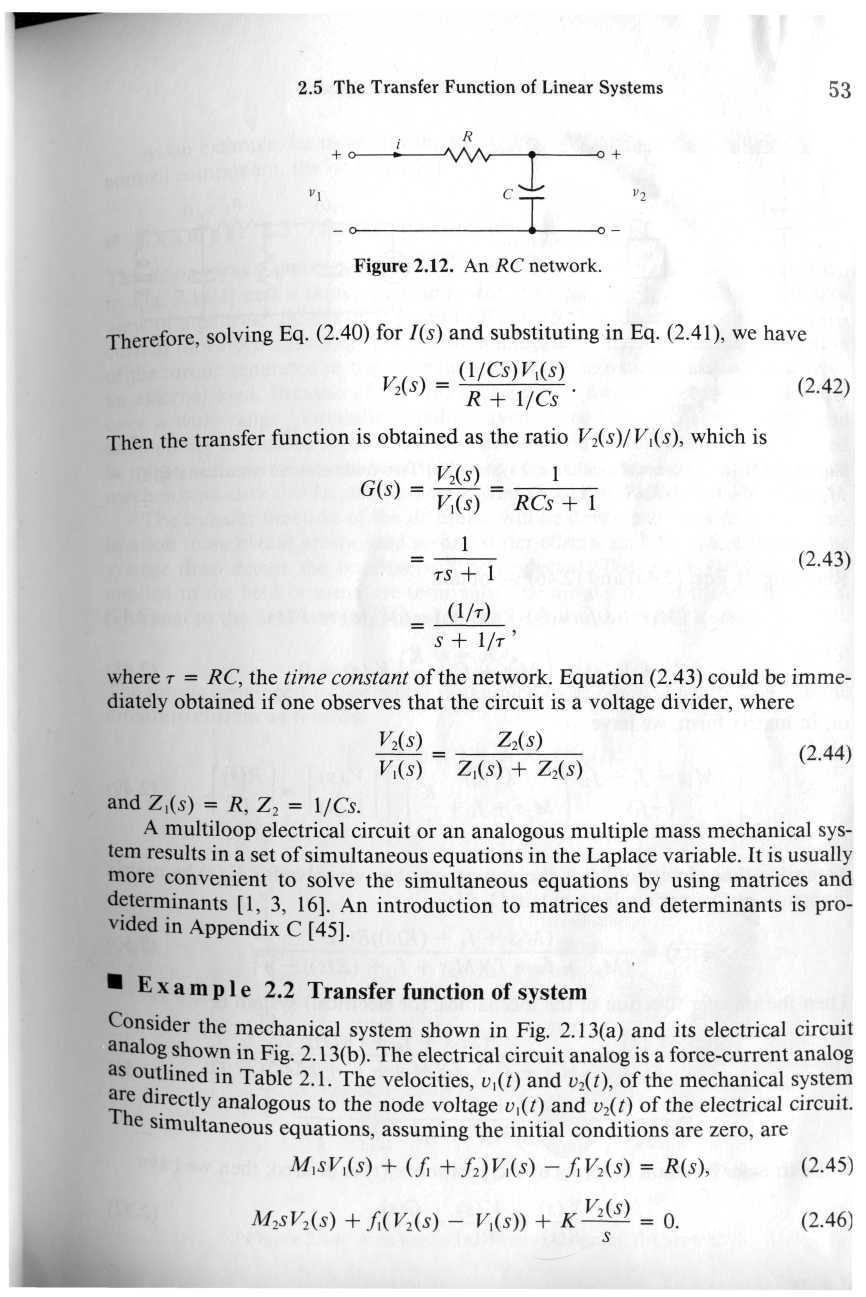
42 Örnek: Aşağıdaki devrede kapasitör gerilimi V c (s) ve giriş gerilimi V(s) yi ilişklendiren transfer fonksiyonunu yazınız. Kontrol tasarımcısı ilk önce giriş ve çıkışı belirlemelidir. Ancak bu örnekte giriş ve çıkış bize verilmiştir. Giriş ugulanan V(t) gerilimi çıkış ise kapasitör gerilimi, V c (t). 6 February 007 Otomatik Kontrol 8
43 . Yöntem Kirşof Gerilimler Yasası: di( t) Ri( t) L i( τ ) dτ = v( τ ) dt C t 0 Başlangıç koşullarını sıfır kabul ederek Laplas dönüşümünü yapalım: RI ( s) LsI ( s) I( s) = V ( s) Cs Denklemi düzenleyecek olursak: V ( s) = ( R Ls ) I( s) Cs Dikkat edilecek olursa uygulanan gerilim; çevrimdeki devre elemanlarının empedansları çarpı devre akımıdır. 6 February 007 Otomatik Kontrol 9
44 V ( s) I( s) = ( R Ls ) Cs V c ( s) i elde etmeye çalışıyoruz. V ( s) V c ( s) = I( s) Cs V V ( s) ( s) = V ( s) c Cs c = ( R Ls ) V ( s) Cs RCs LCs Cs ( ) Cs V c ( s) = LC V ( s) R s s L LC 6 February 007 Otomatik Kontrol 0
45 Aslında devreyi çözmeye başlamadan devre elemanlarının devre üzerinde empedans değerlerini yazabiliriz. 6 February 007 Otomatik Kontrol
46 . Yöntem Kirşof Akımlar Yasası: Bir noktadan çıkan akımları pozitif, noktaya gelen akımları negatif kabul edeceğiz. Bizim devremizde akımlar; kapasitör içinden geçen akım ve seri bağlı direnç ve endüktörden geçen akımdır. Vc ( s) Cs V c ( s) V ( s) R Ls = 0 6 February 007 Otomatik Kontrol Çözecek olursak: V c ( s) = LC V ( s) R s s L LC
47 3. Yöntem Gerilim Bölücü: Kapasitör uçlarındaki gerilim uygulanan gerilimin bir kısmıdır. Dolayısıyla kapasitör empedansını toplam empedansa bölerek de kapasitör gerilimini bulabiliriz. V ( ) Cs c s = V ( s) R Ls Cs Bu örnekte tek çevreli bir elektriksel devremiz vardı, fakat çoğu elektriksel devreler birden çok döngü içerirler. Çok çevreli devrelerin transfer fonksiyonlarını elde edebilmek için:. Devre elemanlarının empedans değerleri yazılır. Çevrede akımın yönü seçilir 3. Çevrede Kirşof gerilimler yasası uygulanır 4. Çıkışı elde etmek için denklemler sırasıyla çözülür 5. Transfer fonksiyonu oluşturulur 6 February 007 Otomatik Kontrol 3
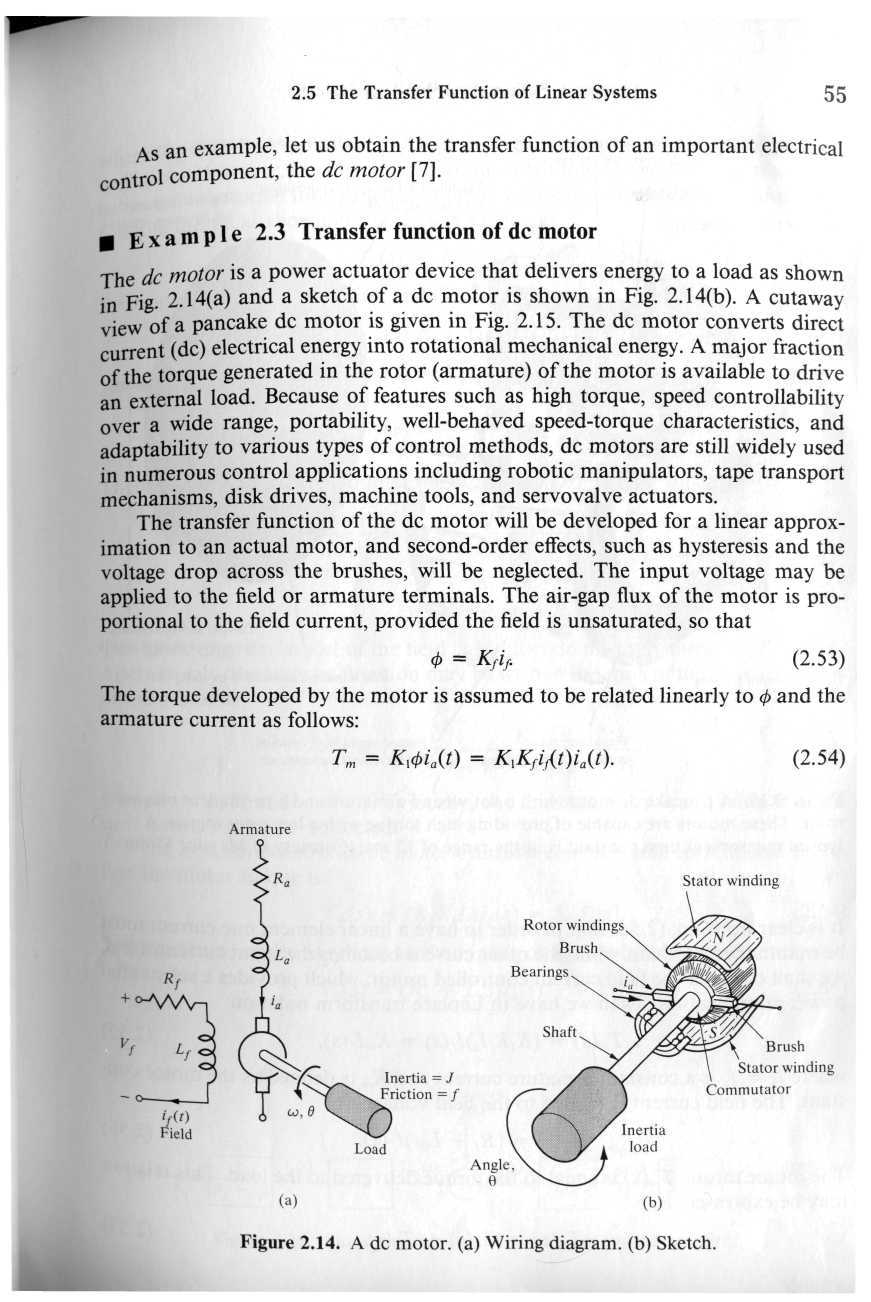
48 Örnek: Aşağıdaki devrede I (s)/v (s) transfer fonksiyonunu yazınız. Basşlangıç koşullarını sıfır varsayarak devre elemanlarının empedanslarını yazalım 6 February 007 Otomatik Kontrol 4
49 . Çevrimde R I( s) LsI( s) LsI ( s) = V ( s) Cs. Çevrimde LsI s) R I ( s) I ( s) LsI ( s) 0 ( = I (s) ve I (s) li terimleri birlikte yazacak olursak; ( R Ls) I( s) LsI ( s) = V ( s) LsI ( s) ( Ls R ) I( s) Cs = I (s) i Çözmek için kramer yasasını kullanacak olursak; 0 Δ = ( R Ls) Ls ( Ls Ls R ) Cs 6 February 007 Otomatik Kontrol 5
50 6 February 007 Otomatik Kontrol 6 Δ = 0 ) ( ) ( ) ( Ls s V Ls R s I Δ = LsV (s) Transfer Fonksiyonu: ) ( ) ( ) ( s V s I s G = Δ = Δ = Ls s V s LsV s G ) ( ) ( ) ( ) ( ) ( R s L R R C LCs R R LCs =
51 6 February 007 Otomatik Kontrol 7
52 6 February 007 Otomatik Kontrol 8
53 . Çevrimdeki empedansları n Ortak empedansların I I - =. Çevrimde uygulanan Gerilimlerin - Ortak empedansların. Çevrimdeki empedansların I I =. Çevrimde uygulanan Gerilimlerin Çoğu zaman transfer fonksiyonunun bulunması için en kolay yöntem çevre gerilimleri değil, nod akımları yöntemidir. Diferansiyel denklemlerin sayısı gerilimleri bilinmeyen nod ların sayısı kadardır. Nod denklemlerini yazarken devre elemanlarını admitans olarak göstermek kolaylık sağlar. Admitans : Empedansın çarpmaya göre tersidir ve Y(s) ile gösterilir; Y ( s) = = Z( s) I( s) V ( s) 6 February 007 Otomatik Kontrol 9
54 Nod akımları ile transfer fonksiyonunu elde edeceksek:. Devre elemanlarının admitans değerleri yazılır. Gerilim kaynakları akım kaynakları cinsinden yazılır (Eğer kolaylık sağlayacaksa) 3. Nod da Kirşof akımlar yasası uygulanır 4. Çıkışı elde etmek için denklemler sırasıyla çözülür 5. Transfer fonksiyonu oluşturulur 6 February 007 Otomatik Kontrol 0
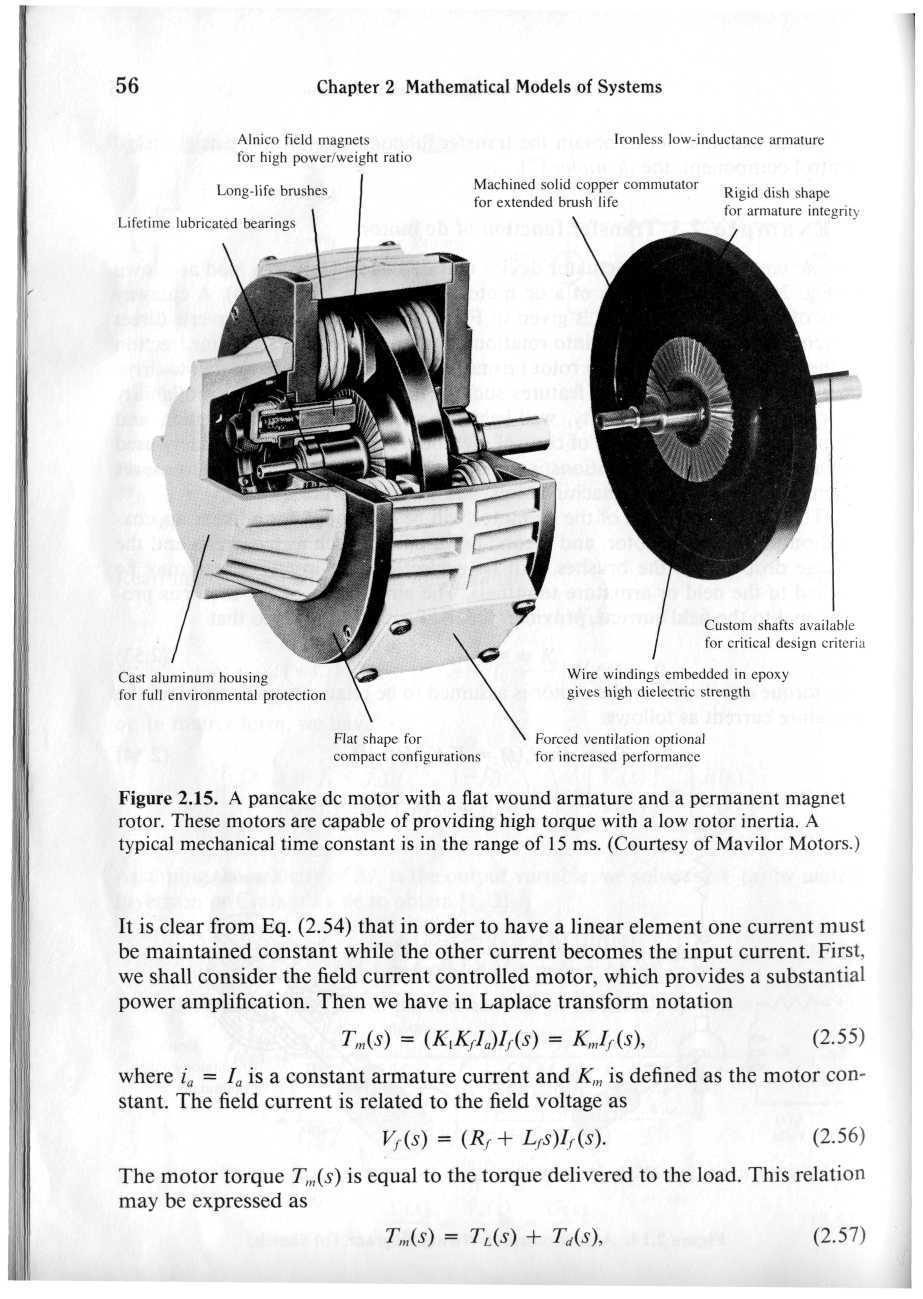
55 Örnek: Aşağıdaki devrede V c (s)/v(s) transfer fonksiyonunu nod akımlarını kullanarak yazınız. Gerilim kaynağını, akım kaynağına empedansları admitanslara dönüştürelim. 6 February 007 Otomatik Kontrol
56 I ( s) = Y ( s) V ( s) G ( G Ls VL s) VL ( s) G[ VL ( s) VC ( s)] = V ( s) Vc(s) nod undaki akımların : CsV V L (S) ve V C (s) leri düzenleyelim: G C ( s) G [ V ( s) V ( s)] = Ls s) C G VL ( s) GVC ( s) = V ( s) G L 0 ( G Cs) V ( s) 0 VL ( C = G 6 February 007 Otomatik Kontrol
57 Sırayla çözdüğümüzde transfer fonksiyonu: V c ( s) V ( s) = ( G G ) s GG s C GG L C LC s G LC. Nod a bağlı admitansların V L - Ortak admitansların V C =. Nod da uygulanan akımların - Ortak admitansların V L. Nod a bağlı admitansların V C =. Nod da uygulanan akımların 6 February 007 Otomatik Kontrol 3
58 Örnek: Aşağıdaki devrede çevre denklemlerini yazınız. 6 February 007 Otomatik Kontrol 4
59 . Çevredeki empedansların. ve. Çevredeki ortak empedansların I - I. ve 3. Çevredeki ortak empedansların - I 3 =. Çevrede uygulanan Gerilimlerin -. ve. Çevredeki ortak empedansların. Çevredeki empedansların I I. ve 3. Çevredeki ortak empedansların - I 3 =. Çevrede uygulanan Gerilimlerin -. ve 3. Çevredeki ortak empedansların. ve 3. Çevredeki ortak empedansların I - I ( s ) I ( s ) ( s ) ( s ) I ( s ) ( 9 s ) I ( s ) 4 si ( s ) 3. Çevredeki empedansların I 3 4 s ( s ) 6 February 007 Otomatik Kontrol I I ( s ) s I 3 = ( s ) 4 si I 3 3 ( s ) 3. Çevrede uygulanan Gerilimlerin = V ( s ) = ( s ) = 0 0 5
60 Mekaniksel Sistemlerin Transfer Fonksiyonları (Düzlemsel Hareket) 6 February 007 Otomatik Kontrol 6
61 Mekaniksel sistemler ile elekriksel sistemler arasında analoji oluşturmamız mümkündür. Örneğin, uygulanan kuvvet, uygulanan gerilimin; hız, akımın; yer değiştirme de yük ün karşılığıdır. Mekaniksel Empedans: Z M ( s) = F( s) X ( s) Yay elemanı: Sönüm elemanı: F ( s) = KX ( s) F( s) = f sx ( s) v Kütle: F ( s) = Ms X ( s) 6 February 007 Otomatik Kontrol 7
62 Örnek: X(s)/F(s) transfer fonksiyonunu bulunuz. RLC devresine benziyor, mekaniksel sistemelerde diferansiyel denklem hareket denklemi ile yazılır ve bu mekaniksel sistemi tanımlar. Elektriksel devrelerde akımın yönünü biz seçtiğimiz gibi mekaniksel sistemlerde de hareketin pozitif yönünü belirleriz ve serbest cisim diyagramını çizeriz. Serbest cisim diyagramında cisme etkiyen tüm kuvvetler ve pozitif hareket yönü gösterilir. Kuvvetler zaman tanım aralığında veya Laplas dönüşümü ile(sıfır başlangıç koşulu varsayılarak) gösterilebilir. Newton yasası uygulanarak, kuvvetler toplanır ve sıfıra eşitlenir. 6 February 007 Otomatik Kontrol 8
63 Kx(t) dx( t) f v dt d x( t) M dt Kuvvetleri toplayıp sıfıra eşitleyecek olursak; Ms X ( s) fv sx ( s) KX ( s) = F( s) G( s) X ( s) = = F( s) Ms ( Ms f ) v s K X ( s) = F( s) fv s K 6 February 007 Otomatik Kontrol 9
64 Çoğu mekaniksel sistemler, çok çevrimli çok nod lu elektriksel devrelere benzemektedir ve sistemi tanımlamak için birden fazla diferansiyel denklem gerekir. Mekaniksel sistemlerde gerekli olan hareket denklemlerinin sayısı, lineer olarak bağımsız hareketlerin sayısına eşittir. Lineer bağımsızlığın manası hareket noktasının diğer hareket noktaları sabitlendiği halde hareket edebilmesidir. Lineer bağımsızlığın bir diğer manası serbestlik derecesidir. Eletriksel sistemlerden örnek verecek olursdak; iki çevreli bir devrede her bir akım diğer çevrenin akımının etkisi altındadır. Eğer çevrelerden birini açık devre yaparsak, diğer çevrede gerilim kaynağı varsa o çevrede akım akmaya devam eder. 6 February 007 Otomatik Kontrol 30
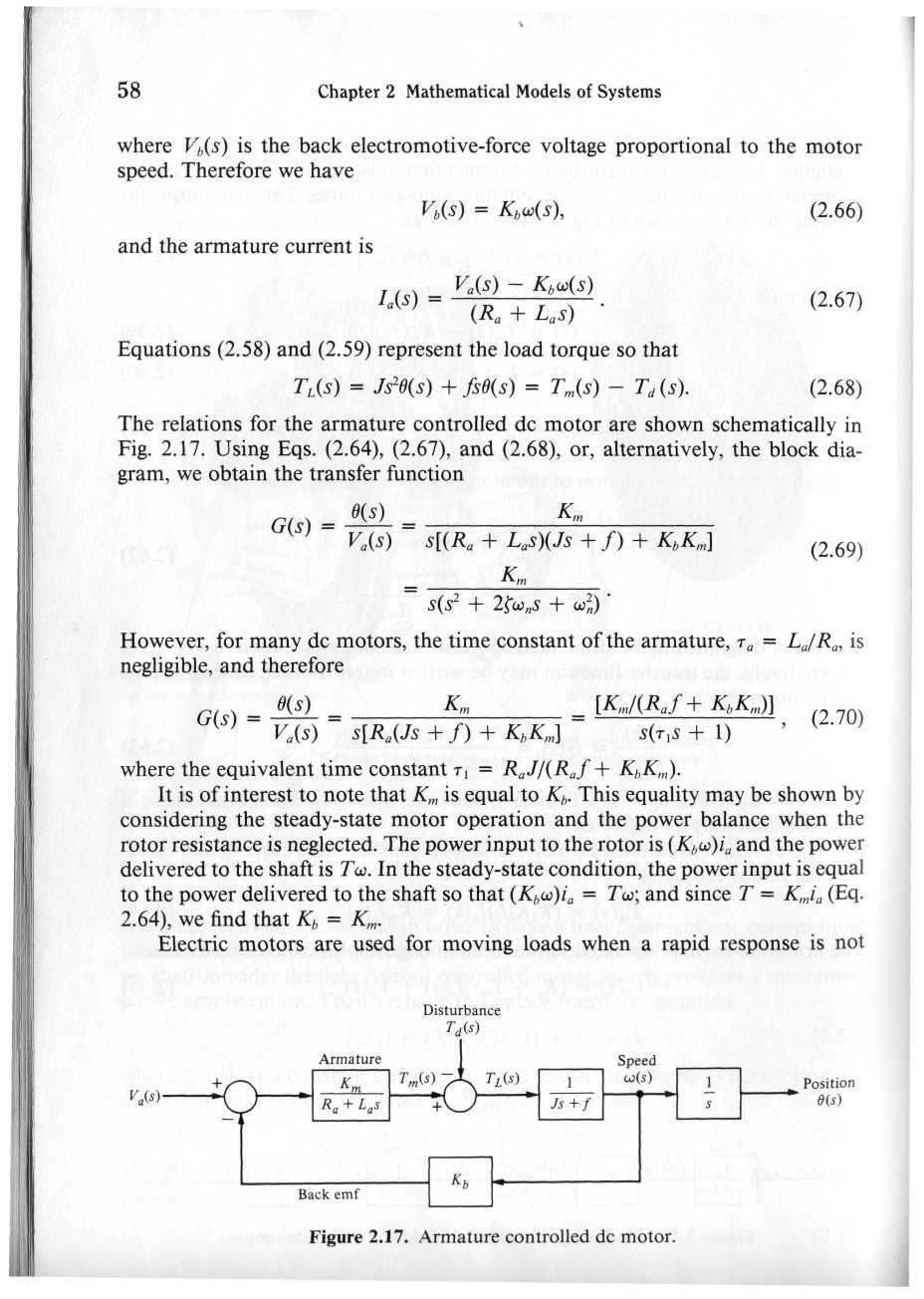
65 Örnek: X(s)/F(s) transfer fonksiyonunu bulunuz. Her iki kütle yatay doğrultuda biri sabit iken hareket ettirilebileceği için sistemin serbestlik derecesi ikidir. İki denklem iki kütlenin serbest cisim diyagramından elde edilecektir. Eğer M yi sabit tutup M i sağa doğru hareket ettirecek olursak 6 February 007 Otomatik Kontrol 3
66 Eğer M yi sabit tutup M i sağa doğru hareket ettirecek olursak M üzerine süperpozisyon uygulanacak olursa: 6 February 007 Otomatik Kontrol 3
67 Aynı işlemleri M için yapalım: Eğer M yi sabit tutup M i sağa doğru hareket ettirecek olursak Eğer M yi sabit tutup M i sağa doğru hareket ettirecek olursak M üzerine süperpozisyon uygulanacak olursa: 6 February 007 Otomatik Kontrol 33
68 6 February 007 Otomatik Kontrol 34 ( ) ( ) [ ] ( ) ) ( ) ( ) ( 3 3 s F s X K s f s X K K s f f s M v v v = ( ) ( ) ( ) [ ] 0 ) ( ) ( = s X K K s f f M s s X K s f v v v Δ = = ) ( ) ( ) ( ) ( 3 K s f s G s F s X v ( ) ( ) ( ) ( ) ( ) ( ) Δ= K K s f f M s K s f K s f K K s f f Ms v v v v v v
69 X deki harekete bağlı empedansların X ve X deki ortak empedansların X - X = X e uygulanan Kuvveterin - X ve X deki ortak empedansların X X deki harekete bağlı X empedansların = X e uygulanan Kuvveterin 6 February 007 Otomatik Kontrol 35
70 Örnek: Yukarıdaki mekaniksel sistemin hareket denklemlerini direk yazınız. [ ( ) ( )] M s f f s K K X s) K X ( s) f sx ( s) 0 v v3 ( v3 3 = [ ( ) ] M s f f s K X ( s) f sx ( s) F( ) KX( s) v v4 v4 3 = s f v [ ( ) ] M s f f s X ( s) f sx ( s) 0 3 sx( s) fv4sx( s) 3 v3 v4 3 v4 3 = 6 February 007 Otomatik Kontrol 36
71 Mekaniksel Sistemlerin Transfer Fonksiyonları (Dairesel Hareket) 6 February 007 Otomatik Kontrol 37
72 Dairesel hareket eden mekaniksel sistemler düzlemsel hareket eden mekaniksel sistemler gibi ele alınır. Kuvvet in yerini tork, düzlemsel yer değiştirmenin yerini açısal yer değiştirme alır. Ayrıca kütle yerine atalet ifadesi kullanılır. Serbestlik derecesi ise düzlemsel harekette yer değiştirme ile belirlenirken dairesel harekette dönebilme ile belirlenir. Önce, hareket noktalarını sabit tutularak cismi döndürürüz ve oluşacak torkları serbest cisim diyagramı üzerinde gösteririz. Sonra cismi sabitleyip sırasıyla bitişik hareket noktaları döndürülerek oluşacak torklar serbest cisim diyagramında gösterilir. Her bir hareket noktası için bu işlemi tekrarlanır. Tüm serbest cisim diyagramlarında tork lar toplanır ve sıfıra eşitlenir. 6 February 007 Otomatik Kontrol 38
73 Örnek: Sistemin, θ (s)/t(s) transfer fonksiyonunu yazınız. Çubuk her iki taraftan yataklanmışıtır ve burulmaya maruz kalmaktadır. Sağ tarafa tork uygulanırken yer değişrtirme sol taraftan ölçülmektedir. Burada çubuğun burulmasını iki atalet arasında bulunan yay gibi düşünebiliriz. 6 February 007 Otomatik Kontrol 39
74 J üzerindeki J nın hareketiyle oluşan Torklar J üzerindeki J nın hareketiyle oluşan Torklar J üzerindeki oluşan toplam Torklar J üzerindeki J nın hareketiyle oluşan Torklar J üzerindeki J nın hareketiyle oluşan Torklar 6 February 007 Otomatik Kontrol J üzerindeki oluşan toplam Torklar 40
75 Her iki ataletteki torkları topladığımızda, hareket denklemini elde ederiz: ( J s D s K ) θ s) Kθ ( s) = T ( ) ( s ( J s D s K ) θ ( s) 0 Kθ ( s) = θ ( s) T ( s) = K Δ Δ = ( J s D s K ) K K ( ) J s Ds K 6 February 007 Otomatik Kontrol 4
76 θ deki harekete bağlı empedansların θ ve θ deki ortak empedansların θ - θ = θ e uygulanan Torkların - θ ve θ deki ortak empedansların θ θ deki harekete bağlı θ empedansların = θ e uygulanan Torkların 6 February 007 Otomatik Kontrol 4
77 Örnek: Hareket denklemlerini direk yazınız. θ deki harekete bağlı empedansların θ ve θ deki ortak empedansların θ - θ - θ ve θ 3 deki ortak empedansların θ 3 = θ e uygulanan Torkların - θ ve θ deki ortak empedansların θ θ deki harekete bağlı empedansların θ ve θ 3 deki ortak θ - empedansların θ 3 = θ e uygulanan Torkların - θ ve θ 3 deki θ ve θ 3 deki ortak ortak θ empedansların empedansların θ 3 deki harekete bağlı empedansların - θ = 6 February 007 Otomatik Kontrol θ 3 θ 3 e uygulanan Torkların 43
78 ( J s D s K ) θ s) Kθ ( s) 0θ ( s) = T ( ) ( 3 s ( J s D s K ) θ ( s) D sθ ( s) 0 Kθ ( s) 3 = ( J s D s D s) θ ( s) 0 0θ ( s) Dsθ ( s) = 6 February 007 Otomatik Kontrol 44

79
80
81
82
83

84
85

86
87
88
89
90
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Otomatik Kontrol. Fiziksel Sistemlerin Modellenmesi. Prof.Dr.Galip Cansever. Elektriksel Sistemeler Mekaniksel Sistemler. Ders #4
 Der #4 Otomatik Kontrol Fizikel Sitemlerin Modellenmei Elektrikel Sitemeler Mekanikel Sitemler 6 February 007 Otomatik Kontrol Kontrol itemlerinin analizinde ve taarımında en önemli noktalardan bir tanei
Der #4 Otomatik Kontrol Fizikel Sitemlerin Modellenmei Elektrikel Sitemeler Mekanikel Sitemler 6 February 007 Otomatik Kontrol Kontrol itemlerinin analizinde ve taarımında en önemli noktalardan bir tanei
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
f(t)e st dt s > 0 Cebirsel denklem s- tanım bölgesi L 1 Unutulmamalıdır ki, farklı türden tanım ve değer uzayları arasında
e st dt s > 0 Cebirsel denklem s- tanım bölgesi L 1 Unutulmamalıdır ki, farklı türden tanım ve değer uzayları arasında") Bölüm #2 Laplace Dönüşümü F (s) = f(t)e st dt s > şeklinde tanımlanan dönüşüme LAPLACE dönüşümü adı verilir ve kısaca L{f(t)} ile sembolize edilir. Diferansiyel denklemlerin Çözümünde Laplace dönüşümü
Bölüm #2 Laplace Dönüşümü F (s) = f(t)e st dt s > şeklinde tanımlanan dönüşüme LAPLACE dönüşümü adı verilir ve kısaca L{f(t)} ile sembolize edilir. Diferansiyel denklemlerin Çözümünde Laplace dönüşümü
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri
 Kontrol Sistemleri") Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma
 Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu Elektriksel Sistemlerin Transfer Fonksiyonu Mekanik Sistemlerin Transfer Fonksiyonu Elektromekanik Sistemlerin Transfer Fonksiyonu Doğrusalsızlıklar
Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu Elektriksel Sistemlerin Transfer Fonksiyonu Mekanik Sistemlerin Transfer Fonksiyonu Elektromekanik Sistemlerin Transfer Fonksiyonu Doğrusalsızlıklar
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ BÖLÜMÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ MM306 EEM304 SİSTEM KONTROL DİNAMİĞİ SİSTEMLERİNE GİRİŞ Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ MM306 EEM304 SİSTEM KONTROL DİNAMİĞİ SİSTEMLERİNE GİRİŞ Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU
 RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Burulma (Torsion) Amaçlar
 Amaçlar") (Torsion) Amaçlar Bu bölümde şaftlara etkiyen burulma kuvvetlerinin etkisi incelenecek. Analiz dairesel kesitli şaftlar için yapılacak. Eleman en kesitinde oluşan gerilme dağılımı ve elemanda oluşan burulma
(Torsion) Amaçlar Bu bölümde şaftlara etkiyen burulma kuvvetlerinin etkisi incelenecek. Analiz dairesel kesitli şaftlar için yapılacak. Eleman en kesitinde oluşan gerilme dağılımı ve elemanda oluşan burulma
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Chapter 9. Elektrik Devreleri. Principles of Electric Circuits, Conventional Flow, 9 th ed. Floyd
 Elektrik Devreleri Eşanlı Denklemler Bölüm 9 daki devre analizi yöntemleri eşanlı (paralel) denklem kullanımını gerektirmektedir. Eşanlı denklemlerin çözümünü basitleştirmek için, denklemler genelde standart
Elektrik Devreleri Eşanlı Denklemler Bölüm 9 daki devre analizi yöntemleri eşanlı (paralel) denklem kullanımını gerektirmektedir. Eşanlı denklemlerin çözümünü basitleştirmek için, denklemler genelde standart
EEM 307 Güç Elektroniği
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ÖLÇME VE DEVRE LABORATUVARI DENEY 2
 ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ÖLÇME VE DEVRE LABORATUVARI DENEY 2 2.1. ÇEVRE AKIMLAR YÖNTEMİ Elektrik devrelerinin çözümünde kullanılan en basit ve en kolay yöntemlerden biri çevre akımları yöntemidir.
ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ÖLÇME VE DEVRE LABORATUVARI DENEY 2 2.1. ÇEVRE AKIMLAR YÖNTEMİ Elektrik devrelerinin çözümünde kullanılan en basit ve en kolay yöntemlerden biri çevre akımları yöntemidir.
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
4. Sunum: AC Kalıcı Durum Analizi. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Diferansiyel denklemler uygulama soruları
 . Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
. Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
Bölüm 1. Elektriksel Büyüklükler ve Elektrik Devre Elemanları
 Bölüm Elektriksel Büyüklükler ve Elektrik Devre Elemanları. Temel Elektriksel Büyüklükler: Akım, Gerilim, Güç, Enerji. Güç Polaritesi.3 Akım ve Gerilim Kaynakları F.Ü. Teknoloji Fak. EEM M.G. .. Temel
Bölüm Elektriksel Büyüklükler ve Elektrik Devre Elemanları. Temel Elektriksel Büyüklükler: Akım, Gerilim, Güç, Enerji. Güç Polaritesi.3 Akım ve Gerilim Kaynakları F.Ü. Teknoloji Fak. EEM M.G. .. Temel
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
GERİLME ANALİZİ VE MOHR ÇEMBERİ MUKAVEMET
 GERİLME ANALİZİ VE MOHR ÇEMBERİ MUKAVEMET Yrd. Doç. Dr. Emine AYDIN Yrd. Doç. Dr. Elif BORU 1 GENEL YÜKLEME DURUMUNDA GERİLME ANALİZİ Daha önce incelenen gerilme örnekleri eksenel yüklü yapı elemanları
GERİLME ANALİZİ VE MOHR ÇEMBERİ MUKAVEMET Yrd. Doç. Dr. Emine AYDIN Yrd. Doç. Dr. Elif BORU 1 GENEL YÜKLEME DURUMUNDA GERİLME ANALİZİ Daha önce incelenen gerilme örnekleri eksenel yüklü yapı elemanları
Düzenlenirse: 9I1 5I2 = 1 108I1 60I2 = 12 7I1 + 12I2 = 4 35I1 60I2 = I1 = 8 I 1
 ELEKTRİK-ELEKTRONİK DERSİ FİNAL/BÜTÜNLEME SORU ÖRNEKLERİ Şekiller üzerindeki renkli işaretlemeler soruya değil çözüme aittir: Maviler ilk aşamada asgari bağımsız denklem çözmek için yapılan tanımları,
ELEKTRİK-ELEKTRONİK DERSİ FİNAL/BÜTÜNLEME SORU ÖRNEKLERİ Şekiller üzerindeki renkli işaretlemeler soruya değil çözüme aittir: Maviler ilk aşamada asgari bağımsız denklem çözmek için yapılan tanımları,
Ders İçerik Bilgisi. Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
DC DEVRE ÇÖZÜM YÖNTEMLERİ
 DC DEVRE ÇÖZÜM YÖNTEMLERİ Elektrik devresi, kaynak ve yük gibi çeşitli devre elemanlarının herhangi bir şekilde bağlantısından meydana gelir. Bu gibi devrelerin çözümünde genellikle, seri-paralel devrelerin
DC DEVRE ÇÖZÜM YÖNTEMLERİ Elektrik devresi, kaynak ve yük gibi çeşitli devre elemanlarının herhangi bir şekilde bağlantısından meydana gelir. Bu gibi devrelerin çözümünde genellikle, seri-paralel devrelerin
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
1. RC Devresi Bir RC devresinde zaman sabiti, eşdeğer kapasitörün uçlarındaki Thevenin direnci ve eşdeğer kapasitörün çarpımıdır.
 DENEY 1: RC DEVRESİ GEÇİCİ HAL DURUMU Deneyin Amaçları RC devresini geçici hal durumunu incelemek Kondansatörün geçici hal eğrilerini (şarj ve deşarj) elde etmek, Zaman sabitini kavramını gerçek devrede
DENEY 1: RC DEVRESİ GEÇİCİ HAL DURUMU Deneyin Amaçları RC devresini geçici hal durumunu incelemek Kondansatörün geçici hal eğrilerini (şarj ve deşarj) elde etmek, Zaman sabitini kavramını gerçek devrede
TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI
 Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Problemler: Devre Analizi-II
 Problemler: Devre Analizi-II P.7.1 Grafiği verilen sinüsoidalin hem sinüs hem de kosinüs cinsinden ifadesini yazınız. v(t) 5 4 3 2 1 0-1 t(saniye) -2-3 -4-5 0 1 2 3 4 5 6 7 8 9 10 P.7.2 v1(t) 60Cos( 100
Problemler: Devre Analizi-II P.7.1 Grafiği verilen sinüsoidalin hem sinüs hem de kosinüs cinsinden ifadesini yazınız. v(t) 5 4 3 2 1 0-1 t(saniye) -2-3 -4-5 0 1 2 3 4 5 6 7 8 9 10 P.7.2 v1(t) 60Cos( 100
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
V cn V ca. V bc. V bn. V ab 30. -V bn. V an HATIRLATMALAR. Faz-Faz ve Faz-Nötr Gerilimleri. Yıldız ve Üçgen Bağlı Yüklerde Akım-Gerilim İlişkileri
 HATIRLATMALAR Faz-Faz ve Faz-Nötr Gerilimleri V cn V ca V ab 30 10 V an V bn V bc V ab 30 -V bn cos30 30 V an cos30 3 3 30 Yıldız ve Üçgen Bağlı Yüklerde Akım-Gerilim İlişkileri Üçgen Bağlı Yük: V LN =
HATIRLATMALAR Faz-Faz ve Faz-Nötr Gerilimleri V cn V ca V ab 30 10 V an V bn V bc V ab 30 -V bn cos30 30 V an cos30 3 3 30 Yıldız ve Üçgen Bağlı Yüklerde Akım-Gerilim İlişkileri Üçgen Bağlı Yük: V LN =
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
Diferensiyel denklemler sürekli sistemlerin hareketlerinin ifade edilmesinde kullanılan denklemlerdir.
 .. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
.. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A
 T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
TEMEL MEKANİK 4. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
KISITLI OPTİMİZASYON
 KISITLI OPTİMİZASYON SİMPLEKS YÖNTEMİ Simpleks Yöntemi Simpleks yöntemi iteratif bir prosedürü gerektirir. Bu iterasyonlar ile gerçekçi çözümlerin olduğu bölgenin (S) bir köşesinden başlayarak amaç fonksiyonunun
KISITLI OPTİMİZASYON SİMPLEKS YÖNTEMİ Simpleks Yöntemi Simpleks yöntemi iteratif bir prosedürü gerektirir. Bu iterasyonlar ile gerçekçi çözümlerin olduğu bölgenin (S) bir köşesinden başlayarak amaç fonksiyonunun
BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER
 BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER b) İkinci süreç eğik atış hareketine karşılık geliyor. Orada örendiğin problem çözüm adımlarını kullanarak topun sopadan ayrıldığı andaki hızını bağıntı olarak
BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER b) İkinci süreç eğik atış hareketine karşılık geliyor. Orada örendiğin problem çözüm adımlarını kullanarak topun sopadan ayrıldığı andaki hızını bağıntı olarak
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
13.Konu Reel sayılar
 13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
DENEY 5 SÜPERPOZİSYON VE MAKSİMUM GÜÇ AKTARIMI
 DENEY 5 SÜPERPOZİSYON VE MAKSİMUM GÜÇ AKTARIMI 5.1. DENEYİN AMACI Deneyin amacı, Süperposizyon Teoreminin ve Maksimum Güç Transferi için gerekli kuşulların öğrenilmesi ve laboratuvar ortamında test edilerek
DENEY 5 SÜPERPOZİSYON VE MAKSİMUM GÜÇ AKTARIMI 5.1. DENEYİN AMACI Deneyin amacı, Süperposizyon Teoreminin ve Maksimum Güç Transferi için gerekli kuşulların öğrenilmesi ve laboratuvar ortamında test edilerek
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
3.5. Devre Parametreleri
 3..3 3.5. Devre Parametreleri 3.5. Devre Parametreleri Mikrodalga mühendisliğinde doğrusal mikrodalga devrelerini karakterize etmek için dört tip devre parametreleri kullanılır: açılma parametreleri (parametreleri)
3..3 3.5. Devre Parametreleri 3.5. Devre Parametreleri Mikrodalga mühendisliğinde doğrusal mikrodalga devrelerini karakterize etmek için dört tip devre parametreleri kullanılır: açılma parametreleri (parametreleri)
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Bölüm 9: Doğrusal momentum ve çarpışmalar
 Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
İÇİNDEKİLER BASİT EŞİTSİZLİKLER. HARFLİ İFADELER Harfli İfadeler ve Elemanları Eşitsizlik Sembolleri ve İşaretin Eşitsizlik İfadesi...
 İÇİNDEKİLER HARFLİ İFADELER Harfli İfadeler ve Elemanları... 1 Benzer Terim... Harfli İfadenin Terimlerini Toplayıp Çıkarma... Harfli İfadelerin Terimlerini Çarpma... Harfli İfadelerde Parantez Açma...
İÇİNDEKİLER HARFLİ İFADELER Harfli İfadeler ve Elemanları... 1 Benzer Terim... Harfli İfadenin Terimlerini Toplayıp Çıkarma... Harfli İfadelerin Terimlerini Çarpma... Harfli İfadelerde Parantez Açma...
 5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
Nedim Tutkun, PhD, MIEEE Düzce Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü Konuralp Düzce
 ELEKTRİK DEVRELERİ I ÖRNEK ARASINAV SORULARI Nedim Tutkun, PhD, MIEEE nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü 81620 Konuralp Düzce Soru-1) Şekildeki devrede
ELEKTRİK DEVRELERİ I ÖRNEK ARASINAV SORULARI Nedim Tutkun, PhD, MIEEE nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü 81620 Konuralp Düzce Soru-1) Şekildeki devrede
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Fizik 101: Ders 23 Gündem
 Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bu bölümde, bir noktaya etkiyen ve bir koordinat ekseni ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi ile ilişkili gerilme bileşenlerine dönüştürmek
Gerilme Dönüşümleri (Stress Transformation) Bu bölümde, bir noktaya etkiyen ve bir koordinat ekseni ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi ile ilişkili gerilme bileşenlerine dönüştürmek
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Hareket Kanunları. Newton un Hareket Kanunları. Fiz 1011 Ders 5. Eylemsizlik - Newton un I. Yasası. Temel - Newton un II. Yasası
 Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ RLC DEVRELERİ DR GÖRKEM SERBES Paralel RLC Devresi Paralel RLC Devresi Seri RLC Devresi Seri RLC Devresi Seri & Paralel RLC: Çözüm RLC Çözümü : Aşırı-Sönümlü (Over-damped) ÖRNEK 92
BLM1612 DEVRE TEORİSİ RLC DEVRELERİ DR GÖRKEM SERBES Paralel RLC Devresi Paralel RLC Devresi Seri RLC Devresi Seri RLC Devresi Seri & Paralel RLC: Çözüm RLC Çözümü : Aşırı-Sönümlü (Over-damped) ÖRNEK 92
11. Sunum: İki Kapılı Devreler. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 11. Sunum: İki Kapılı Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş İki kapılı devreler giriş akımları ve gerilimleri ve çıkış akımları
11. Sunum: İki Kapılı Devreler Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş İki kapılı devreler giriş akımları ve gerilimleri ve çıkış akımları