MAK669 LINEER ROBUST KONTROL
|
|
|
- Ece Özkan
- 10 yıl önce
- İzleme sayısı:
Transkript
1 MAK669 LINEER ROBUS KONROL 7..4

2 Dr değişeni geri beslee(state feedba) ontrol Dr değişeni geri besleeli ontrolde tü dr değişenlerinin elde edilebilir oldğ varsayılatadır. B ontrolün pratite yglanabilesi için tü dr değişenlerinin ölçülesi gereetedir. A B K state feedba B + + I s C y A BK ( ABK) A K si A Açı çevri öleri si A BK Kapalı çevri öleri
 A K si A Açı çevri öleri si A BK")
3 Linear Qadrati Reglator(LQR) Model esaslı ontrol tasarı yönteinin en basit yapısı LQR dır. Lineer sistein aşağıdai şeilde odellendiğini düşüneli A B () b sistele ilişili perforans indesi J ( Q R) dt brada Q Q, R R şelinde tanılıdır. Brada aaç K J perforans indesini iniize eden selinde sistei ararlı hale getiren bir lineer dr değişeni geri besleeli ontrolör olştratır. 3

4 Linear Qadrati Reglator(LQR) Aşağıdai gibi he zaana he de dr değişenine bağlı bir fonsiyonel denle tanılansın: f t (, ) in (, ) t f (, t ) f ( ()) f (, t ) t h dt Fonsiyonelin tanılanan zaan aralığındai değerleri: Hailton-Jaobi denlei f t f in h(, ) g(, ) (I) 4
 g(, )")
5 Linear Qadrati Reglator(LQR) g(, ) A B h(, ) Q R olara alınırsa ve (I) de yerine yazılırsa J t t t t h(, ) dt ( Q R) dt f t f in Q R ( A B) (II) 5
 dt f t f in Q R ( A B) (II) 5")
6 Linear Qadrati Reglator(LQR) f (, t) P olara seçilirse P P f t f P P t f P (II) de yerine yazılırsa P in Q R P( A B) t (III) 6
 t")
7 Linear Qadrati Reglator(LQR) iniize ete için: P Q R P( A B) t R PB R B P P P, R R opt R B P (IV) opt K K R B P 7

8 Linear Qadrati Reglator(LQR) (IV) denleinde bldgz denlei (III) denleinde yerine yazılırsa P Q R P( A B) P Q R B P R P A B ( ) ( R B P) ( ( R B P)) P Q PA PB ( R B P) (soldan sagdan çarpanı olara yazılır) Brada PA ( A P PA) olara alınırsa: P ( Q A P PA PBR B P) P PA A P Q PBR B P elde edilir. P PA A P Q PBR B P Riati denlei 8
 P PA A P Q PBR B P elde edilir.")
9 LQR Problei Örne: Sistei için opti ontrolü hesaplayınız. r= y + A B C - K 9

10 LQR Problei p p A, B, Q R P p p PA A P Q PBR B P p p p p p PA p p p p p p p p p AP p p p p p p

11 LQR Problei p p p p PBR B P p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p
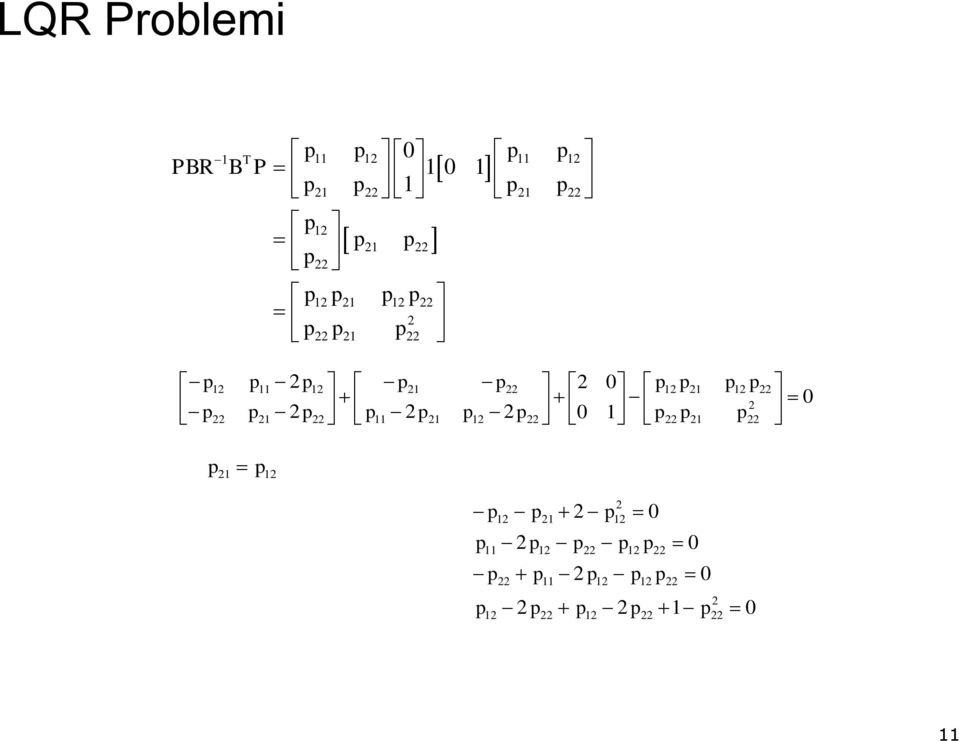
12 LQR Problei p p p p.73 =.73 p 4 p p p p 4 p A=[ - -]; B=[ ]; Q=[ ]; R=; p p p p p p.43 [K,P,E]=lqr(A,B,Q,R) EAl=eig(A-B*K) P K R B P
![54 A=[ - -]; B=[ ]; Q=[ ]; R=; p p p p p p.](/docs-images/46/9414816/images/page_12.jpg "43 [K,P,E]=lqr(A,B,Q,R) EAl=eig(A-B*K) P.43.73.")
13 3 Riati denleinin çözüü Hailton atrisi n n n n n I PA Q PBR B A P PA Q PBR B P A P I A BR B P I P Q A A BR B H Q A I P I H P Özvetör etod: Hailton atrisinin özvetör ve özdeğerlerinden P atrisi hesaplanatadır.

14 Opti Kontrol Problei I Çeyre taşıt odeli için LQR ontrol tasarıı. Atif () a t () a t Gövde () p t () p t Pasif Gövde t () Atatör t () eer eer ( ) [ ( ) ( )] ( ) ( ) p p a a a p ( ) 4
 Atatör t () eer eer ( ) [ ( ) ( )]")
15 Opti Kontrol Problei I ( ) ˆ ˆ ˆ ˆ 3 ˆ ˆ 4 ˆ d ˆ dt ˆ ˆ 3 ˆ ˆ 4 ˆ ˆ ˆ ˆ ˆ ˆ 3 3 ˆ ˆ 4 4 Bradai örnete yol profilinin adı fonsiyon oldğ düşünülüyor. B drda sabit olara alınabilir. ˆ ˆ ˆ ( ˆ ) ˆ 3 4 5

16 Opti Kontrol Problei I J [ ˆ Qˆ R] dt ( ) : teerleğin dinai sapası ( ) : as izafi hareeti Perforans indesinde b ii far dr değişeni için alırsa: J [ q ( ) q( ) r ] dt Araç gövdesinin düşey ivelenesi ile orantılı olan atatör vveti t ( ) aynı zaanda sürüş onforszlğnn da bir ölçüsüdür. B nedenle J aaç fonsiyonnn iniize edilesi sürüş onforszlğ veya atatör girişinin iniize edilesi ve teerle dinai sapası ile izafi as hareetinin ağırlılı toplaının iniize edilesi arasında seçi(trade-off) yapa sonn verir. Ağırlı paraetreleri ile siste dr değişenleri arasındai ilişi: q ( ) q ( ) q ˆ q ( ˆ ˆ ) ˆ ( ) q ˆ q ( ˆ ˆ ˆ ˆ ) ( q q ) ˆ q ˆ q ˆ ˆ 6
 yapa sonn verir.")
17 Opti Kontrol Problei I Perforans indesinde J [ ˆ ˆ ] Q R dt Q atirisi Q q q ˆ q q q ˆ ˆ ˆ, ˆ 3 4 olştrlabilir. K ˆ 7
![] Q R dt Q atirisi Q q q ˆ q](/docs-images/46/9414816/images/page_17.jpg "q q ˆ ˆ ˆ, ˆ 3 4")
18 Opti Kontrol Problei I MAK669 qarodel.dl -_a / Kontrol _a dd s Yol Profili 3_hat =d_hat s _hat -_p / Dinai sapa / [ _hat: _hat; 3_hat;4_hat] Gain _a _p / / s 4_hat=d_ s _hat (-) _hat _p _p K* ve 8

19 Opti Kontrol Problei I %qar. %%% Paraeters %%% =375; =38; =4; =56; =5; =.5; % A=[ ; ; -/ ; ]; B=[;;-/;/]; r=.; q=; q=5; Q=[ q+q -q -q q ]; R=r; K=lqr(A,B,Q,R) 9

20 Opti ontrol problei II ( ) ( ) ( ) ( ) M K C E MX CX KX E

21 Opti ontrol problei II A B y C I A M K M C B M E C Case I: Q R t f J 3 3 dt 3 4 Case II: Q C C, R
22 Opti ontrol problei II s B* s C* []^*r+[]^*r Fn s perforane inde.97 J IC=[ ; ; ; ] ve Ciis - A* []^*q+[]^*q+[3]^*q3+[4]^*q4 ts Matri Gain Fn state feedba -K* Clo Display yaytleodel.dl MAK 669-
23 lear =; =.; =; =; =.; M=[ ; ]; K=[+ -; - ]; C=[ -; - ]; E=[ ]; inm=inv(m); A=[zeros(,) eye() -inm*k -inm*c]; eig(a) B=[ ; ; inm*e]; C=[ ; ]; D=zeros(,); Q=[ ; ; ; ]; %Case I Q=C'*C; %Case II q=q(,);q=q(,);q3=q(3,3);q4=q(4,4); R=*eye(); r=r(,);r=r(,); K=lqr(A,B,Q,R) A=A-B*K; eig(a) figre() pzap(a,b,c,d) ais([-6 - ]); hold on pzap(a,b,c,d) [ n, den]=sstf(a,b,c,d,); [n, den]=sstf(a,b,c,d,); w=logspae(-,3,); f=w/pi/; ag=bode(n,den,w); ag=*log(ag); ag=bode(n,den,w); ag=*log(ag); set(ga,'fontsize',4) figre() seilog(f,ag(:,),'r--',f,ag(:,),'b-') ais([^(-),^,-,3]); label('freqeny Hz') ylabel('gain db') title('freqeny response of the syste') 3
24 Opti ontrol problei II Gain db Gain db Freqeny response of the syste Freqeny response of the syste withot ontrol Case I ----> y withot ontrol Case II ----> y with ontrol -6 with ontrol Freqeny Hz - - Freqeny Hz 4
25 Opti ontrol problei >> help lqr LQR Linear-qadrati reglator design for state spae systes. [K,S,E] = LQR(SYS,Q,R,N) allates the optial gain atri K sh that: * For a ontinos-tie state-spae odel SYS, the state-feedba law = -K iniizes the ost fntion J = Integral {'Q + 'R + *'N} dt sbjet to the syste dynais d/dt = A + B * For a disrete-tie state-spae odel SYS, [n] = -K[n] iniizes J = S {'Q + 'R + *'N} sbjet to [n+] = A[n] + B[n]. he atri N is set to zero when oitted. Also retrned are the the soltion S of the assoiated algebrai Riati eqation and the losed-loop eigenvales E = EIG(A-B*K). [K,S,E] = LQR(A,B,Q,R,N) is an eqivalent synta for ontinos-tie odels with dynais d/dt = A + B See also lqry, lqgreg, lqg, dlqr, are, dare. 5
26 Linear Frational ransforation(lf) LF blo yapısı ontrol sisteinin giriş/çıış ilişisini gösterete llanılatadır. B yapı aynı zaanda belirsizlilerin ontrol sisteini nasıl etilediğini göstere için llanılatadır.
27 Linear Frational ransforation(lf) Mateatisel anlada LF yapısının çıartılası: as b s d (d ) denleini düşüneli. B denle aynı zaanda aşağıdai şeilde de yazılabilir: b ( a ) s b d d ( sd ) d b ( s) b ( a ) s d d as b ( sd ) s d d bd ( a bd ) s( d s) d (I)
28 Linear Frational ransforation(lf) ( I ) denle yapısı ontrol sistelerinin blo diyagraları gösteriinde giriş /çıış ilişisine arşılı geletedir. Bn göre için şeildei geribeslee yapısını aşağıdai şeilde düşüneli: z w p p w P y p p sy ve y ortadan aldırılırsa z p p s( ps) p w elde edilir. (I) ifadesi ile arşılaştırılırsa: = z w P p p bd a bd p p d d
29 Linear Frational ransforation(lf) Üst LF Yapısı w M y z y M M M z w M M w F (, ) : ( ) M M M I M M
30 Linear Frational ransforation(lf) Alt LF Yapısı Sistee ait yapısal belirsizliler LF yapısında ifade edilebilir. w M z y M M M M M z w M M w M y M M y z M w M y M w M y M w M y ( I M ) y M w y ( I M ) M w z M w M y z M w M ( I M ) M w z w F ( M, ) : M M ( I M ) M l
31 Linear Frational ransforation(lf) opla belirsizliği için LF: w M y z M I I G o y I M z w I G o w F ( M, ) : M M ( I M ) M F ( M, ) : G o Çıış çarpı belirsizliği iin LF: M I Go G o F ( M, ) : G G ( I ) G o o o
32 Linear Frational ransforation(lf) LF yalaşıı transfer atrisi ve dr zayı arasında ilişi rada llanılabilir. Bir sistein dr zayı denlei A B y C D transfer atrisi A B G s F I C D s I alı nırsa s A B G( ) G( s) F (, ) C D ( ) D C( si A) B (, )
33 Paraetri Belirsizli Paraetri Belirsizliler: Bir ço endüstriyel ontrol sisteinde sistei olştran eleanların areteristileri doğr tanılanayabilir, esie veya yıprana etileri veya çalışa şartlarının değişesinden dolayı dinai sistede belirsizliler olşatadır. B şeildei belirsizlilere paraetri veya yapısal belirsizliler olara isilendiriyorz. Paretri belirsizliler düşü freans perforansınını etiler. B tip paraetri belirsizlilere örneler eani sistelerde atılı veya sönü atsayıları, eletrisel sistelerde direnç, apasitans veya indütans değerleri, çalarda aerodinai sabitler vb. dir.
34 Paraetri Belirsizli Bir yay ütle sönü sisteini düşüneli: f f,, nin ta değerlerinin bilinediğini faat belirli bilinen aralılarda oldğn düşüneli. Özel olara gerçe ütle in noinal ütle nin %, gerçe sönü değeri nin noinal sönü değeri nin % si ve gerçe atılı değeri nin noinal atılı değeri nin %3 adar değiştiğini düşüneli. ( ) (.3,.3 ) (.,. ) [ ] tanılansın (.3 ) [ ] (. )
35 Paraetri Belirsizli Bilinediği düşünülen faat [,] aralığında blnan, ve bozntları(pertrbations) tanılayara siste yapısını b bozntları içeree şeilde ele alabiliriz. (. ) (. ) (.3 )
36 Paraetri belirsizlilerin LF yapısında çıartılası.. (. ) F ( M, ) : M M ( I M ) M l Bozntlar he üst LF he de alt LF yapısında elde edilebilir.. ( ). F ( M, ) : M M ( I M ) M. ( )..
37 Paraetri belirsizlilerin LF yapısında çıartılası Blo diagraında blnasından dolayı b değerin LF ifadesini blaız yerinde olaatır. F ( M, ) : M M ( I M ) M l. (. ). (. ).. (. ) (. ).... F ( M, ) : M M ( I M ) M. (. ) (. )
38 Paraetri belirsizlilerin LF yapısında çıartılası. (. ). F ( M, ) : M M ( I M ) M l. F ( M, ) : M M ( I M ) M. ( )..
39 Paraetri belirsizlilerin LF yapısında çıartılası.3 (.3 ).3 F M l (, ) :.3 ( ).3 F ( M, ) :.3 ( ).3.3
40 G Şeildei dış giriş ve çıış değişenlerini esas alara G olştrnz. Paraetri belirsizlilerin LF yapısında çıartılası y y y z
41 Paraetri belirsizlilerin LF yapısında çıartılası Paraetri belirsizli içeren siste: (. ) (.3 ) (. ) (. ) (. ) (. ) (. ) (.3 )
42 Paraetri belirsizlilerin LF yapısında çıartılası w.. y z z y y z..3 z. w. ( z z ) y. w. ( z z ) y y z. z.3 z y y y
43 Paraetri belirsizlilerin LF yapısında çıartılası...3 ( z z ). y...3 ( z z ). y y z. z.3 z y y y
44 Paraetri belirsizlilerin LF yapısında çıartılası..3. y..3. y y z y y y
45 Paraetri belirsizlilerin LF yapısında çıartılası..3. y..3. y y z G z y y y A, B..3, B...3. C, D, D A B B G C D D C D D Genişletiliş siste yapısı(agented syste) C, D, D
46 Paraetri belirsizlilerin LF yapısında çıartılası A, B..3, B...3. C, D, D C, D, D %lft_sys. = 3; = ; = ; d =.; d =.; d =.3; % A = [ -/ -/]; B = [ -d -d/ -d/]; B = [ /]; C = [-/ -/ ]; C = [ ]; D = [-d -d/ -d/ ]; D = [/ ]; D = [ ]; D = ; G = p(a,[b,b],[c;c],[d D;D D]);
47 Paraetri belirsizlilerin LF yapısında çıartılası _no = 3; _no = ; _no = ; d_ =.; d_ =.; d_ =.3; M = [-d_ /_no; -d_ /_no]; M = [ _no; d no]; M = [ _no; d no]; int = ndsys([],[ ]); int = ndsys([],[ ]); systenaes = ' M M M int int' ; inptvar = ' [;;;]' ; inpt_to_m = ' [; -M()-M()]' ; inpt_to_m = ' [ ; int]' ; inpt_to_m = ' [ ; int]' ; inpt_to_int = ' [ M() ]' ; inpt_to_int = ' [ int ]' ; otptvar = ' [M(); M(); M();int]' ; G=sysi; M M Int Int M M M M M M z z z y y y M Aynı işle Matlab ot sysi ile de yapılabiletedir.
48 Paraetri belirsizlilerin LF yapısında çıartılası
49 Paraetri belirsizlilerin LF yapısında çıartılası G z Orijinal sistein belirsiz yapısı üst LF gösterii ile aşağıdai şeilde ifade edilebilir. z F (, ) G
50 % % Freqeny responses of the pertrbed plants % lft_sys oega = logspae(-,,); [delta,delta,delta3] = ndgrid([- ],[- ],[- ]); for j = :7 delta = diag([delta(j),delta(j),delta3(j)]); olp = starp(delta,g); olp_i = sel(olp,,); olp_g = frsp(olp_i,oega); figre() vplot('bode',olp_g,'-') sbplot(,,) hold on sbplot(,,) hold on end sbplot(,,) olp_i = sel(g,4,4); olp_g = frsp(olp_i,oega); vplot('bode',olp_g,'r--') sbplot(,,) title('bode PLOS OF PERURBED PLANS') hold off sbplot(,,) hold off
51 Phase (degrees) Log Magnitde BODE PLOS OF PERURBED PLANS Freqeny (radians/se) Freqeny (radians/se)
52 Ödev Bir ütle-yay sisteinin denlei f z f şelinde veriletedir. Gerçe atılı değeri noinal atılı değeri 'dan % adar değişetedir: (. ) Brada [,] aralığında değişen bozntları gösteretedir. LF yalaşıını llanara aşağıdai yapıyı veren M atrisini olştrnz. = g ve freans evabını blnz. no = N/ için
Sigma 30, 415-426, 2012 Research Article / Araştırma Makalesi SEISMIC CONTROL OF CRANES WITH ACTUATOR SATURATED MIXED H 2 /H CONTROLLER
 Jornal of Engineering and Natral Sienes Mühendisli ve Fen ilileri ergisi Siga, -6, Researh rtile / raştıra Maalesi SEISMI ONROL OF RNES WIH UOR SURE MIE H /H ONROLLER. Otay ZELOĞLU *, het SĞIRLI Yıldı
Jornal of Engineering and Natral Sienes Mühendisli ve Fen ilileri ergisi Siga, -6, Researh rtile / raştıra Maalesi SEISMI ONROL OF RNES WIH UOR SURE MIE H /H ONROLLER. Otay ZELOĞLU *, het SĞIRLI Yıldı
= + ise bu durumda sinüzoidal frekansı. genlikli ve. biçimindeki bir taşıyıcı sinyalin fazının modüle edildiği düşünülsün.
 4.2. çı Modülasyonu Yüse reanslı bir işaret ile bilgi taşıa, işaretin genliğinin, reansının veya azının bir esaj işareti ile odüle edilesi ile gerçeleştirilebilir. Bu üç arlı odülasyon yöntei sırasıyla,
4.2. çı Modülasyonu Yüse reanslı bir işaret ile bilgi taşıa, işaretin genliğinin, reansının veya azının bir esaj işareti ile odüle edilesi ile gerçeleştirilebilir. Bu üç arlı odülasyon yöntei sırasıyla,
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Meani Titreşiler ve Kontrolü Maine Mühendisliği Bölüü [email protected] 7..8 Sönüsüz te serbestli dereceli sisteler Sistede yay ve ütle veya ütlesel atalet ile burula yay etisinin olduğu denge onuu etrafında
Meani Titreşiler ve Kontrolü Maine Mühendisliği Bölüü [email protected] 7..8 Sönüsüz te serbestli dereceli sisteler Sistede yay ve ütle veya ütlesel atalet ile burula yay etisinin olduğu denge onuu etrafında
AKTİF ARAÇ SÜSPANSİYON SİSTEMLERİNİN ADAPTİF KONTROLÜ
 AKİF ARAÇ ÜPANİYON İEMLERİNİN ADAPİF KONROLÜ olga YALGI ve Y. ai ÜNLÜOY AELAN A.Ş., P.K., Yeniahalle, 67 ANKARA Orta Doğu eni Üniversitesi, Maina Mühendisliği Bölüü, 65 ANKARA Bu çalışada atif süspansiyon
AKİF ARAÇ ÜPANİYON İEMLERİNİN ADAPİF KONROLÜ olga YALGI ve Y. ai ÜNLÜOY AELAN A.Ş., P.K., Yeniahalle, 67 ANKARA Orta Doğu eni Üniversitesi, Maina Mühendisliği Bölüü, 65 ANKARA Bu çalışada atif süspansiyon
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUS KONROL [email protected] 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
MAK669 LINEER ROBUS KONROL [email protected] 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
biçiminde standart halde tanımlı olsun. Bu probleme ilişkin simpleks tablosu aşağıdaki gibidir
 KONU 6: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ III 6 Siples Tablo Siples algoritasında en ii çözü, verilen dpp için bir teel ugun çözüden başlanara, ardışı saısal işlelerle araştırılır Bu işleler,
KONU 6: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ III 6 Siples Tablo Siples algoritasında en ii çözü, verilen dpp için bir teel ugun çözüden başlanara, ardışı saısal işlelerle araştırılır Bu işleler,
Aktif süspansiyon sistemli çeyrek araç modelinin gözlemleyiciyle optimal kontrolü
 SAÜ. Fen Bil. Der. 17. Cilt,. Sayı, s. 181-187, 13 SAU J. Sci. Vol 17, No, p. 181-187, 13 Aktif süspansiyon sisteli çeyrek araç odelinin gözleleyiciyle optial kontrolü Ayhan Özdeir 1*, Dinçer Maden 1*
SAÜ. Fen Bil. Der. 17. Cilt,. Sayı, s. 181-187, 13 SAU J. Sci. Vol 17, No, p. 181-187, 13 Aktif süspansiyon sisteli çeyrek araç odelinin gözleleyiciyle optial kontrolü Ayhan Özdeir 1*, Dinçer Maden 1*
KABLOSUZ İLETİŞİM
 KABLOSUZ İLETİŞİM 805540 KÜÇÜK ÖLÇEKLİ SÖNÜMLEME SÖNÜMLEMENİN MODELLENMESİ İçeri 3 Sönümleme yapısı Sönümlemenin modellenmesi Anara Üniversitesi, Eletri-Eletroni Mühendisliği Sönümleme Yapısı 4 Küçü ölçeli
KABLOSUZ İLETİŞİM 805540 KÜÇÜK ÖLÇEKLİ SÖNÜMLEME SÖNÜMLEMENİN MODELLENMESİ İçeri 3 Sönümleme yapısı Sönümlemenin modellenmesi Anara Üniversitesi, Eletri-Eletroni Mühendisliği Sönümleme Yapısı 4 Küçü ölçeli
MEKANİK TİTREŞİMLER. Örnek olarak aşağıdaki iki serbestlik dereceli öteleme sistemini ele alalım. ( ) ( ) 1
 ( ) 1") MEKANİK TİTREŞİMLER ÇOK SERBESTLİK DERECELİ SİSTEMLER: Gerçe uygulaalarda birço ühendili iei birden fazla erbeli dereei içeretedir. Ço erbeli dereeli ielerin titreşi analizlerinde diferaniyel denle taıları
MEKANİK TİTREŞİMLER ÇOK SERBESTLİK DERECELİ SİSTEMLER: Gerçe uygulaalarda birço ühendili iei birden fazla erbeli dereei içeretedir. Ço erbeli dereeli ielerin titreşi analizlerinde diferaniyel denle taıları
) ile algoritma başlatılır.
 ile algoritma başlatılır.") GRADYANT YÖNTEMLER Bütün ısıtsız optimizasyon problemlerinde olduğu gibi, bir başlangıç notasından başlayara ardışı bir şeilde en iyi çözüme ulaşılır. Kısıtsız problemlerin çözümü aşağıdai algoritma izlenere
GRADYANT YÖNTEMLER Bütün ısıtsız optimizasyon problemlerinde olduğu gibi, bir başlangıç notasından başlayara ardışı bir şeilde en iyi çözüme ulaşılır. Kısıtsız problemlerin çözümü aşağıdai algoritma izlenere
Bir Kütle-Yay Sisteminde Belirli Bir Doğal Frekansı Değiştirmeksizin Ters Yapısal Değişiklik Yapılması
 Uluslararası Katılılı 7. Maina eorisi Sepozyuu, İzir, 4-7 Haziran 05 Bir Kütle-Yay Sisteinde Belirli Bir Doğal Freansı Değiştiresizin ers Yapısal Değişili Yapılası M. Hüseyinoğlu * O. Çaar Fırat University
Uluslararası Katılılı 7. Maina eorisi Sepozyuu, İzir, 4-7 Haziran 05 Bir Kütle-Yay Sisteinde Belirli Bir Doğal Freansı Değiştiresizin ers Yapısal Değişili Yapılası M. Hüseyinoğlu * O. Çaar Fırat University
Titreşim Hareketi Periyodik hareket
 05.01.01 Titreşi Hareeti Periyodi hareet Belirli bir zaan sonra, verilen/belirlenen bir durua düzenli olara geri dönen bir cisin yaptığı hareet. Periyodi hareetin özel bir çeşidi eani sistelerde olur.
05.01.01 Titreşi Hareeti Periyodi hareet Belirli bir zaan sonra, verilen/belirlenen bir durua düzenli olara geri dönen bir cisin yaptığı hareet. Periyodi hareetin özel bir çeşidi eani sistelerde olur.
Konteyner Krenlerinde Depremden Kaynaklanan Titreşimlerin Bulanık PID Kontrolör ile Aktif Kontrolü
 Fırat Üniv. Mühenisli Bilileri Dergisi Fırat Univ. Journal of Engineering (), 9-, (), 9-, Konteyner Krenlerine Depreen Kaynalanan Titreşilerin Bulanı PID Kontrolör ile Atif Kontrolü C.Otay AZELOĞLU, Ahet
Fırat Üniv. Mühenisli Bilileri Dergisi Fırat Univ. Journal of Engineering (), 9-, (), 9-, Konteyner Krenlerine Depreen Kaynalanan Titreşilerin Bulanı PID Kontrolör ile Atif Kontrolü C.Otay AZELOĞLU, Ahet
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 016-Güz Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu [email protected] 5.11.016 Bilye-çubuk problemi DC motor
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 016-Güz Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu [email protected] 5.11.016 Bilye-çubuk problemi DC motor
RASGELE SÜREÇLER. Bir X rasgele değişkenin, a ve b arasında tekdüze dağılımlı olabilmesi için olasılık yoğunluk fonksiyonu aşağıdaki gibi olmalıdır.
 RASGELE SÜREÇLER Eğer bir büyülüğün her t anında alacağı değeri te bir şeilde belirleyen matematisel bir ifade verilebilirse bu büyülüğün deterministi bir büyülü olduğu söylenebilir. Haberleşmeden habere
RASGELE SÜREÇLER Eğer bir büyülüğün her t anında alacağı değeri te bir şeilde belirleyen matematisel bir ifade verilebilirse bu büyülüğün deterministi bir büyülü olduğu söylenebilir. Haberleşmeden habere
2 Serbestlik Dereceli Taşıt Modeli PID Kontrolü
 Serbestli Dereceli Taşıt Modeli PID Kontrolü Matematisel Modelin Çıarılması: Hareet denlemlerinin çıarılmasında Lagrange yöntemi ullanılmıştır. Lagrange yöntemi haında detaylı bilgi (Francis,978; Pasin,984;
Serbestli Dereceli Taşıt Modeli PID Kontrolü Matematisel Modelin Çıarılması: Hareet denlemlerinin çıarılmasında Lagrange yöntemi ullanılmıştır. Lagrange yöntemi haında detaylı bilgi (Francis,978; Pasin,984;
TAŞIT TİTREŞİMLERİNİN TEORİK ANALİZİ VE BİR BİLGİSAYAR MODELLEMESİ THEORETICAL ANALYSIS OF VEHICLE VIBRATIONS AND A COMPUTER MODELLING
 Esişehir Osangai Üniversitesi MühMiFaDergisi CXIX, S, 6 Eng&ArhFa Esişehir Osangai University, Vol XIX, No:, 6 Maalenin Geliş Tarihi : 956 Maalenin Kabul Tarihi : 486 TAŞIT TİTREŞİMLERİNİN TEORİK ANALİZİ
Esişehir Osangai Üniversitesi MühMiFaDergisi CXIX, S, 6 Eng&ArhFa Esişehir Osangai University, Vol XIX, No:, 6 Maalenin Geliş Tarihi : 956 Maalenin Kabul Tarihi : 486 TAŞIT TİTREŞİMLERİNİN TEORİK ANALİZİ
4.DENEY . EYLEMSİZLİK MOMENTİ
 4.DENEY. EYLEMSİZLİK MOMENTİ Aaç: Sabit bir eksen etrafında dönen katı cisilerin eylesizlik oentlerini ölçek. Araç ve Gereçler: Kronoetre (zaan ölçer), kupas, cetvel, disk, alka, leva, kütleler. Bilgi
4.DENEY. EYLEMSİZLİK MOMENTİ Aaç: Sabit bir eksen etrafında dönen katı cisilerin eylesizlik oentlerini ölçek. Araç ve Gereçler: Kronoetre (zaan ölçer), kupas, cetvel, disk, alka, leva, kütleler. Bilgi
Çok Yüksek Mobiliteli Sönümlemeli Kanallardaki OFDM Sistemleri için Kanal Kestirimi
 9-11 Aralı 2009 Ço Yüse Mobiliteli Sönümlemeli Kanallardai OFDM Sistemleri için Kanal Kestirimi İstanbul Üniversitesi Eletri-Eletroni Mühendisliği Bölümü {myalcin, aan}@istanbul.edu.tr Sunum İçeriği Giriş
9-11 Aralı 2009 Ço Yüse Mobiliteli Sönümlemeli Kanallardai OFDM Sistemleri için Kanal Kestirimi İstanbul Üniversitesi Eletri-Eletroni Mühendisliği Bölümü {myalcin, aan}@istanbul.edu.tr Sunum İçeriği Giriş
PI KONTROLÖR TASARIMI ÖDEVİ
 PI ONTROLÖR TASARIMI ÖDEVİ ONTROLÖR İLE TASARIM ontrolör Taarım riterleri Taarım riterleri genellile itemine yapmaı geretiğini belirtme ve naıl yaptığını değerlendirme için ullanılır. Bu riterler her bir
PI ONTROLÖR TASARIMI ÖDEVİ ONTROLÖR İLE TASARIM ontrolör Taarım riterleri Taarım riterleri genellile itemine yapmaı geretiğini belirtme ve naıl yaptığını değerlendirme için ullanılır. Bu riterler her bir
2. TRANSFORMATÖRLER. 2.1 Temel Bilgiler
 . TRANSFORMATÖRLER. Temel Bilgiler Transformatörlerde hareet olmadığından dolayı sürtünme ve rüzgar ayıpları mevcut değildir. Dolayısıyla transformatörler, verimi en yüse (%99 - %99.5) olan eletri maineleridir.
. TRANSFORMATÖRLER. Temel Bilgiler Transformatörlerde hareet olmadığından dolayı sürtünme ve rüzgar ayıpları mevcut değildir. Dolayısıyla transformatörler, verimi en yüse (%99 - %99.5) olan eletri maineleridir.
k olarak veriliyor. Her iki durum icin sistemin lineer olup olmadigini arastirin.
 LINEER SISTEMLER Muhendislite herhangibir sistem seil(ref: xqs402) dei gibi didortgen blo icinde gosterilir. Sisteme disaridan eti eden fatorler giris, sistemin bu girislere arsi gosterdigi tepi ciis olara
LINEER SISTEMLER Muhendislite herhangibir sistem seil(ref: xqs402) dei gibi didortgen blo icinde gosterilir. Sisteme disaridan eti eden fatorler giris, sistemin bu girislere arsi gosterdigi tepi ciis olara
DENEY 3. HOOKE YASASI. Amaç:
 DENEY 3. HOOKE YASASI Amaç: ) Herhangi bir uvvet altındai yayın nasıl davrandığını araştırma ve bu davranışın Hooe Yasası ile tam olara açılandığını ispatlama. ) Kütle yay sisteminin salınım hareeti için
DENEY 3. HOOKE YASASI Amaç: ) Herhangi bir uvvet altındai yayın nasıl davrandığını araştırma ve bu davranışın Hooe Yasası ile tam olara açılandığını ispatlama. ) Kütle yay sisteminin salınım hareeti için
SERVOVALF VE HİDROLİK SİSTEMDEN OLUŞAN ELEKTROHİDROLİK BİR DÜMEN SİSTEMİNİN KONUM KONTROLÜ
 GEMİ İNŞAATI VE DENİZ TEKNOLOJİSİ TEKNİK KONGRESİ 08 BİLDİRİLER KİTABI SERVOVALF VE HİDROLİK SİSTEMDEN OLUŞAN ELEKTROHİDROLİK BİR DÜMEN SİSTEMİNİN KONUM KONTROLÜ Fevzi ŞENLİTÜRK, Fuat ALARÇİN ÖZET Bu çalışmada
GEMİ İNŞAATI VE DENİZ TEKNOLOJİSİ TEKNİK KONGRESİ 08 BİLDİRİLER KİTABI SERVOVALF VE HİDROLİK SİSTEMDEN OLUŞAN ELEKTROHİDROLİK BİR DÜMEN SİSTEMİNİN KONUM KONTROLÜ Fevzi ŞENLİTÜRK, Fuat ALARÇİN ÖZET Bu çalışmada
Titreşim nedir? x(t)=x(t+nt)
=x(t+nt)") MEKANİK TİTREŞİMLER Titreşi nedir? Bir sistein denge onuu civarında yapış olduğu salını hareetine titreşii denir. Eğer yapılan salını hareeti T saniyede endini terar ediyorsa böyle hareetlere peryodi hareet
MEKANİK TİTREŞİMLER Titreşi nedir? Bir sistein denge onuu civarında yapış olduğu salını hareetine titreşii denir. Eğer yapılan salını hareeti T saniyede endini terar ediyorsa böyle hareetlere peryodi hareet
TEK SERBESTLİK DERECELİ TİTREŞİM SİSTEMİNİN LAGUERRE POLİNOMLARI İLE MATRİS ÇÖZÜMÜ
 EK SERBESLİK DERECELİ İREŞİM SİSEMİNİN LAGUERRE POLİNOMLARI İLE MARİS ÇÖZÜMÜ Mehmet ÇEVİK a, Nurcan BAYKUŞ b a Celal Bayar Üniversitesi Maine Mühendisliği Bölümü, Muradiye 454, Manisa. b Douz Eylül Üniversitesi,
EK SERBESLİK DERECELİ İREŞİM SİSEMİNİN LAGUERRE POLİNOMLARI İLE MARİS ÇÖZÜMÜ Mehmet ÇEVİK a, Nurcan BAYKUŞ b a Celal Bayar Üniversitesi Maine Mühendisliği Bölümü, Muradiye 454, Manisa. b Douz Eylül Üniversitesi,
SONLU ELEMANLAR TEKNİĞİYLE ELDE EDİLEN AKILLI KİRİŞ
 SONLU ELEMANLAR EKNİĞİYLE ELDE EDİLEN AKILLI KİRİŞ MODELİNİN HASSASİYEİNİN İYİLEŞİRİLMESİ arkan Çalışkan 1 Volkan Nalbantoğlu 2 Deet Ülker 1 Yavuz Yaan 1 [email protected] [email protected] [email protected]
SONLU ELEMANLAR EKNİĞİYLE ELDE EDİLEN AKILLI KİRİŞ MODELİNİN HASSASİYEİNİN İYİLEŞİRİLMESİ arkan Çalışkan 1 Volkan Nalbantoğlu 2 Deet Ülker 1 Yavuz Yaan 1 [email protected] [email protected] [email protected]
İŞ, GÜÇ, ENERJİ BÖLÜM 8
 İŞ, GÜÇ, EERJİ BÖÜ 8 ODE SORU DE SORUARI ÇÖZÜER 5 Cise eti eden sür- tüne uvveti, IFI0 ür F α F T W (F ür ) (Fcosα (g Fsinα)) düzle Ya pı lan net iş de ğe ri α, ve ütleye bağ lı dır G düzle 00,5 G0 0 I
İŞ, GÜÇ, EERJİ BÖÜ 8 ODE SORU DE SORUARI ÇÖZÜER 5 Cise eti eden sür- tüne uvveti, IFI0 ür F α F T W (F ür ) (Fcosα (g Fsinα)) düzle Ya pı lan net iş de ğe ri α, ve ütleye bağ lı dır G düzle 00,5 G0 0 I
AÇIK KANAL AKIMLARINDA HIZ DAĞILIMININ ENTROPY YÖNTEMİ İLE İNCELENMESİ. Mehmet Ardıçlıoğlu. Ali İhsan Şentürk. Galip Seçkin
 AÇIK KANAL AKILARINDA HIZ DAĞILIININ ENTROPY YÖNTEİ İLE İNCELENESİ ehmet Ardıçlıoğl Yard. Doç. Dr., Erciyes Üniv. ühendislik Fak. İnşaat üh. Böl. Kayseri, Tel: 352 4378, Fax: 9 352 4375784 E-mail: [email protected]
AÇIK KANAL AKILARINDA HIZ DAĞILIININ ENTROPY YÖNTEİ İLE İNCELENESİ ehmet Ardıçlıoğl Yard. Doç. Dr., Erciyes Üniv. ühendislik Fak. İnşaat üh. Böl. Kayseri, Tel: 352 4378, Fax: 9 352 4375784 E-mail: [email protected]
İki Tekerlekli Kendi Kendini Dengeleyen Robotun Yörünge Takibi için Arı Algoritması kullanarak LQR Kontrolcü Tasarımı 1
 Uluslararası Katılılı 7. Makina eorisi Sepozyuu, İzir, 4-7 Haziran 05 İki ekerlekli Kendi Kendini Dengeleyen Robotun Yörünge akibi için Arı Algoritası kullanarak LQR Kontrolcü asarıı M. A. Şen * Selçuk
Uluslararası Katılılı 7. Makina eorisi Sepozyuu, İzir, 4-7 Haziran 05 İki ekerlekli Kendi Kendini Dengeleyen Robotun Yörünge akibi için Arı Algoritası kullanarak LQR Kontrolcü asarıı M. A. Şen * Selçuk
Malzeme Bağıyla Konstrüksiyon
 Shigley s Mechanical Engineering Design Richard G. Budynas and J. Keith Nisbett Malzeme Bağıyla Konstrüsiyon Hazırlayan Prof. Dr. Mehmet Fırat Maine Mühendisliği Bölümü Saarya Üniversitesi Çözülemeyen
Shigley s Mechanical Engineering Design Richard G. Budynas and J. Keith Nisbett Malzeme Bağıyla Konstrüsiyon Hazırlayan Prof. Dr. Mehmet Fırat Maine Mühendisliği Bölümü Saarya Üniversitesi Çözülemeyen
İTME VE MOMENTUM. 1. P i
 7 BÖÜM İTME E MOMENTUM AIŞTIRMAAR ÇÖZÜMER İTME E MOMENTUM P i 0/s kg P s 0/s kg x +x düzle a Du va rın cis e u gu la dı ğı it e, o en tu de ği şi i ne eşit tir P i i 0 0 kg/s P s s ( 0 0 kg/s it e P P
7 BÖÜM İTME E MOMENTUM AIŞTIRMAAR ÇÖZÜMER İTME E MOMENTUM P i 0/s kg P s 0/s kg x +x düzle a Du va rın cis e u gu la dı ğı it e, o en tu de ği şi i ne eşit tir P i i 0 0 kg/s P s s ( 0 0 kg/s it e P P
ÇÖZÜMLÜ SORULAR. ÇÖZÜM Boşluk miktarı: 100,25 100 2 Mil ile yatağın temas alanı : e 2. Hız gradyanı: Kayma gerilmesi:
 LÜ SOULA SOU. Şekilde gösterilen D m = mm çapında bir mil D =,5 mm çapında ve L = mm genişliğinde bir atak içerisinde eksenel doğrltda kp lk bir kvvetle anak,5 m/s ızla areket ettirilebilior. Bna göre
LÜ SOULA SOU. Şekilde gösterilen D m = mm çapında bir mil D =,5 mm çapında ve L = mm genişliğinde bir atak içerisinde eksenel doğrltda kp lk bir kvvetle anak,5 m/s ızla areket ettirilebilior. Bna göre
a : Uydu yörüngesinin büyük yarı ekseni, b: Uydu yörüngesinin küçük yarı ekseni,
 Kepler Kannları Nota onmlarının belirlenmesi için bilgi alınan ydların yörüngelerinin ve b yörüngedei onmlarının bilinmesi gereir. Uyd yörüngeleri ve b yörüngedei hareetlerini belirleme için Kepler annlarından
Kepler Kannları Nota onmlarının belirlenmesi için bilgi alınan ydların yörüngelerinin ve b yörüngedei onmlarının bilinmesi gereir. Uyd yörüngeleri ve b yörüngedei hareetlerini belirleme için Kepler annlarından
MODEL SORU - 1 DEKİ SORULARIN ÇÖZÜMLERİ
 7 BÖÜM İTME E MMENTUM MDE SRU - DEİ SRUARIN ÇÖZÜMERİ Cisi esnek çarpışa yaptığına göre, çarptığı hızla engelden eşit açıyla yansır II engeline dik geldiğinden üzerinden geri döner II I 45 45 45 3 Cis e
7 BÖÜM İTME E MMENTUM MDE SRU - DEİ SRUARIN ÇÖZÜMERİ Cisi esnek çarpışa yaptığına göre, çarptığı hızla engelden eşit açıyla yansır II engeline dik geldiğinden üzerinden geri döner II I 45 45 45 3 Cis e
ile plakalarda biriken yük Q arasındaki ilişkiyi bulmak, bu ilişkiyi kullanarak boşluğun elektrik geçirgenlik sabiti ε
 Farlı Malzemelerin Dieletri Sabiti maç Bu deneyde, ondansatörün plaalarına uygulanan gerilim U ile plaalarda birien yü Q arasındai ilişiyi bulma, bu ilişiyi ullanara luğun eletri geçirgenli sabiti ı belirleme,
Farlı Malzemelerin Dieletri Sabiti maç Bu deneyde, ondansatörün plaalarına uygulanan gerilim U ile plaalarda birien yü Q arasındai ilişiyi bulma, bu ilişiyi ullanara luğun eletri geçirgenli sabiti ı belirleme,
Ders 2 : MATLAB ile Matris İşlemleri
 Ders : MATLAB ile Matris İşlemleri Kapsam Vetörlerin ve matrislerin tanıtılması Vetör ve matris operasyonları Lineer denlem taımlarının çözümü Vetörler Vetörler te boyutlu sayı dizileridir. Elemanlarının
Ders : MATLAB ile Matris İşlemleri Kapsam Vetörlerin ve matrislerin tanıtılması Vetör ve matris operasyonları Lineer denlem taımlarının çözümü Vetörler Vetörler te boyutlu sayı dizileridir. Elemanlarının
MATRİS DEPLASMAN YÖNTEMİ
 SAARYA ÜNİVERSİTESİ M İNŞAAT MÜHENİSİĞİ BÖÜMÜ epartment of Civil Engineering İNM YAI STATIĞI II MATRİS EASMAN YÖNTEMİ Y.OÇ.R. MUSTAA UTANİS [email protected] Saarya Üniversitesi, İnşaat Mühendisliği Bölümü
SAARYA ÜNİVERSİTESİ M İNŞAAT MÜHENİSİĞİ BÖÜMÜ epartment of Civil Engineering İNM YAI STATIĞI II MATRİS EASMAN YÖNTEMİ Y.OÇ.R. MUSTAA UTANİS [email protected] Saarya Üniversitesi, İnşaat Mühendisliği Bölümü
MEKANİK SİSTEMLERİN KAPALI KONTROLÜNÜN RUNGE-KUTTA YÖNTEMİYLE İNCELENMESİ
 . ULUSAL MAKİNA TEORİSİ SEMPOZYUMU Gazi Üniversitesi, Mühendislik-Miarlık Fakültesi, 4-6 Eylül MEKANİK SİSTEMLERİN KAPALI KONTROLÜNÜN RUNGE-KUTTA YÖNTEMİYLE İNCELENMESİ Hira Karagülle Dokuz Eylül Üniversitesi,
. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU Gazi Üniversitesi, Mühendislik-Miarlık Fakültesi, 4-6 Eylül MEKANİK SİSTEMLERİN KAPALI KONTROLÜNÜN RUNGE-KUTTA YÖNTEMİYLE İNCELENMESİ Hira Karagülle Dokuz Eylül Üniversitesi,
Doğrusal Olmayan Devreler, Sistemler ve Kaos
 Dğrusal Olmayan Devreler Sistemler ve Kas Neslihan Serap Şengör da n:07 tel n:0 85 360 [email protected] Özan Karabaca da n:7 tel n:0 85 3506 [email protected] Dğrusal Olmayan Devreler Sistemler ve Kas 6 Şubat
Dğrusal Olmayan Devreler Sistemler ve Kas Neslihan Serap Şengör da n:07 tel n:0 85 360 [email protected] Özan Karabaca da n:7 tel n:0 85 3506 [email protected] Dğrusal Olmayan Devreler Sistemler ve Kas 6 Şubat
Kollektif Risk Modellemesinde Panjér Yöntemi
 Douz Eylül Üniversitesi İtisadi ve İdari Bilimler Faültesi Dergisi, Cilt:6, Sayı:, Yıl:, ss.39-49. olletif Ris Modellemesinde anér Yöntemi ervin BAYAN İRVEN Güçan YAAR Özet Hayat dışı sigortalarda, olletif
Douz Eylül Üniversitesi İtisadi ve İdari Bilimler Faültesi Dergisi, Cilt:6, Sayı:, Yıl:, ss.39-49. olletif Ris Modellemesinde anér Yöntemi ervin BAYAN İRVEN Güçan YAAR Özet Hayat dışı sigortalarda, olletif
[ ]{} []{} []{} [ ]{} g
![[ ]{} []{} []{} [ ]{} g](/thumbs/94/121325428.jpg "[ ]{} []{} []{} [ ]{} g") ZAMAN TANIM ALANINDA ÇÖZÜM Yapı özellilerii ortogoalli şartlarıı sağlaaası duruuda, diferasiel hareet delei doğruda üeri ötelerle çözülebilir Depre etisi altıdai ço atlı apılara ugulaa üzere ii arı üeri
ZAMAN TANIM ALANINDA ÇÖZÜM Yapı özellilerii ortogoalli şartlarıı sağlaaası duruuda, diferasiel hareet delei doğruda üeri ötelerle çözülebilir Depre etisi altıdai ço atlı apılara ugulaa üzere ii arı üeri
Ele Alınacak Ana Konular. Hafta 3: Doğrusal ve Zamanla Değişmeyen Sistemler (Linear Time Invariant, LTI)
") 5..5 Ele Alıaca Aa Koular Ayrı-zama işaretleri impuls dizisi ciside ifade edilmesi Ayrı-zama LTI sistemleri ovolüsyo toplamı gösterilimi Hafta 3: Doğrusal ve Zamala Değişmeye Sistemler (Liear Time Ivariat
5..5 Ele Alıaca Aa Koular Ayrı-zama işaretleri impuls dizisi ciside ifade edilmesi Ayrı-zama LTI sistemleri ovolüsyo toplamı gösterilimi Hafta 3: Doğrusal ve Zamala Değişmeye Sistemler (Liear Time Ivariat
Fizik 101: Ders 24 Gündem
 Terar Fizi 101: Ders 4 Günde Başlangıç oşullarını ullanara BHH denlelerinin çözüü. Genel fizisel saraç Burulalı saraç BHHte enerji Atoi titreşiler Proble: Düşey yay Proble: taşıa tuneli BHH terar BHH &
Terar Fizi 101: Ders 4 Günde Başlangıç oşullarını ullanara BHH denlelerinin çözüü. Genel fizisel saraç Burulalı saraç BHHte enerji Atoi titreşiler Proble: Düşey yay Proble: taşıa tuneli BHH terar BHH &
DERS III ÜRETİM HATLARI. akış tipi üretim hatları. hat dengeleme. hat dengeleme
 DERS ÜRETİM HATLAR ÜRETİM HATLAR Üretim hatları, malzemenin bir seri işlemden geçere ürün haline dönüştürülmesini sağlayan bir maineler ve/veya iş istasyonları dizisidir. Bir üretim hattı üzerinde te bir
DERS ÜRETİM HATLAR ÜRETİM HATLAR Üretim hatları, malzemenin bir seri işlemden geçere ürün haline dönüştürülmesini sağlayan bir maineler ve/veya iş istasyonları dizisidir. Bir üretim hattı üzerinde te bir
İtme ve Momentum. c) Cis min B nok ta sın da ki mo men tu mu, P B
 Cis min B nok ta sın da ki mo men tu mu, P B") İTME E MOMENTUM BÖÜM 7 Alıştıralar ÇÖZÜMER İte ve Moentu P i 0/s kg P s 0/s kg x +x düzle a Du va rın cis e uy gu la dı ğı it e, o en tude ği şi i ne eşit tir P i i 0 0 kg/s P s s ( 0 0 kg/s it e " P "
İTME E MOMENTUM BÖÜM 7 Alıştıralar ÇÖZÜMER İte ve Moentu P i 0/s kg P s 0/s kg x +x düzle a Du va rın cis e uy gu la dı ğı it e, o en tude ği şi i ne eşit tir P i i 0 0 kg/s P s s ( 0 0 kg/s it e " P "
ELASTİK DALGA YAYINIMI
 5..6 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (6 -. DERS Geçtiğiiz ders; Bu derste; Titreşi Serbest titreşiler Periodik hareket Basit haronik hareket Düzgün dairesel hareket Sönülü haronik hareket
5..6 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (6 -. DERS Geçtiğiiz ders; Bu derste; Titreşi Serbest titreşiler Periodik hareket Basit haronik hareket Düzgün dairesel hareket Sönülü haronik hareket
GEÇİRGEN YÜZEYLERİNDEN ÜFLEME YAPILAN KARE KESİTLİ SİLİNDİR ETRAFINDAKİ AKIŞTA ISI GEÇİŞİNİN SAYISAL OLARAK İNCELENMESİ
 5 GEÇİRGEN YÜZEYLERİNDEN ÜFLEME YAPILAN KARE KESİLİ SİLİNDİR ERAFINDAKİ AKIŞA ISI GEÇİŞİNİN SAYISAL OLARAK İNCELENMESİ Brhan ÇUHADAROĞLU ÖZE B çalışmada; geçirgen yüzeyli e are esitli bir silindir etrafındai
5 GEÇİRGEN YÜZEYLERİNDEN ÜFLEME YAPILAN KARE KESİLİ SİLİNDİR ERAFINDAKİ AKIŞA ISI GEÇİŞİNİN SAYISAL OLARAK İNCELENMESİ Brhan ÇUHADAROĞLU ÖZE B çalışmada; geçirgen yüzeyli e are esitli bir silindir etrafındai
IR (İNFRARED) Absorpsiyon Spektroskopisi
 Absorpsiyon Spektroskopisi") IR (İNFRARED) Absorpsiyon Spetrosopisi Spetrosopi Yöntemler Spetrofotometri (UV-Visible, IR) Kolorimetri Atomi Absorbsiyon Spetrosopisi NMR Spetrosopisi ESR (Eletron Spin Rezonans) Spetrosopisi (Kütle
IR (İNFRARED) Absorpsiyon Spetrosopisi Spetrosopi Yöntemler Spetrofotometri (UV-Visible, IR) Kolorimetri Atomi Absorbsiyon Spetrosopisi NMR Spetrosopisi ESR (Eletron Spin Rezonans) Spetrosopisi (Kütle
KİNETİK MODELLERDE OPTİMUM PARAMETRE BELİRLEME İÇİN BİR YAZILIM: PARES
 KİNETİK MODELLERDE OPTİMUM PARAMETRE BELİRLEME İÇİN BİR YAZILIM: PARES Mehmet YÜCEER, İlnur ATASOY, Rıdvan BERBER Anara Üniversitesi Mühendisli Faültesi Kimya Mühendisliği Bölümü Tandoğan- 0600 Anara ([email protected])
KİNETİK MODELLERDE OPTİMUM PARAMETRE BELİRLEME İÇİN BİR YAZILIM: PARES Mehmet YÜCEER, İlnur ATASOY, Rıdvan BERBER Anara Üniversitesi Mühendisli Faültesi Kimya Mühendisliği Bölümü Tandoğan- 0600 Anara ([email protected])
TRAFİK SİMÜLASYON TEKNİKLERİ
 TRFİK SİMÜLSYON TEKNİKLERİ 3. HFT Doç. Dr. Haan GÜLER (2015-2016) 1. TEMEL TRFİK KIM PRMETRELERİ RSINDKİ İLİŞKİ Kesintisiz aımlarda; Hız, Yoğnl ve ım oranı (hacim) arasındai ilişi aşağıdai şeillerde gösterilmiştir.
TRFİK SİMÜLSYON TEKNİKLERİ 3. HFT Doç. Dr. Haan GÜLER (2015-2016) 1. TEMEL TRFİK KIM PRMETRELERİ RSINDKİ İLİŞKİ Kesintisiz aımlarda; Hız, Yoğnl ve ım oranı (hacim) arasındai ilişi aşağıdai şeillerde gösterilmiştir.
İki Tekerlekli Kendini Dengeleyebilen Bir Araç İçin Yapay Sinir Ağı ve Bulanık Mantık Tabanlı Kontrolcü Tasarımı
 OK 04 Bildiri Kitab -3 Eylül 04, Kocaeli İki ekerlekli Kendini Dengeleyebilen Bir Araç İçin Yapay Sinir Ağı ve Bulanık Mantık abanlı Kontrolcü asarıı Muhaed Arif Şen, Mete Kalyoncu, Mustafa ınkır 3, Makine
OK 04 Bildiri Kitab -3 Eylül 04, Kocaeli İki ekerlekli Kendini Dengeleyebilen Bir Araç İçin Yapay Sinir Ağı ve Bulanık Mantık abanlı Kontrolcü asarıı Muhaed Arif Şen, Mete Kalyoncu, Mustafa ınkır 3, Makine
SOLUTION TO ENVIRONMENTAL ECONOMIC POWER DISPATCH PROBLEM IN HYDROTHERMAL POWER SYSTEMS WITH LIMITED ENERGY SUPPLY
 HAM ENERJİ KAYNAĞI KISITLI BİRİM İÇEREN HİDROTERMAL GÜÇ SİSTEMLERİNDE ÇEVRESEL EKONOMİK GÜÇ DAĞITIMI PROBLEMİNİN ÇÖZÜMÜ Serdar ÖZYÖN 1 Celal YAŞAR 1 Hasan TEMURTAŞ 1 Dulupınar Üniversitesi Mühendislik
HAM ENERJİ KAYNAĞI KISITLI BİRİM İÇEREN HİDROTERMAL GÜÇ SİSTEMLERİNDE ÇEVRESEL EKONOMİK GÜÇ DAĞITIMI PROBLEMİNİN ÇÖZÜMÜ Serdar ÖZYÖN 1 Celal YAŞAR 1 Hasan TEMURTAŞ 1 Dulupınar Üniversitesi Mühendislik
LBC 34xx/12 Horn Hoparlörleri
 İletişim Sistemleri LBC xx/ Horn Hoparlörleri LBC xx/ Horn Hoparlörleri www.boschsecrity.com/tr Yüse verimli sürücüler W'a adar (mas güç) Geniş açılma açısı Müemmel ses yayını Basit güç ayarı Bosch'n yüse
İletişim Sistemleri LBC xx/ Horn Hoparlörleri LBC xx/ Horn Hoparlörleri www.boschsecrity.com/tr Yüse verimli sürücüler W'a adar (mas güç) Geniş açılma açısı Müemmel ses yayını Basit güç ayarı Bosch'n yüse
Şekil 8.6 Bilgi akışının sistem içinde düzenlenmesi
 97 Bu denkle takıının çözüü belirli bir P1(t) ve P3(t) rejii için Z düzeyinin değişiini verir. Bu çözüün ateatiksel tekniklerle gerçekleştirilesi güçtür. Ancak noral progralaa bilen biri tarafından kolayca
97 Bu denkle takıının çözüü belirli bir P1(t) ve P3(t) rejii için Z düzeyinin değişiini verir. Bu çözüün ateatiksel tekniklerle gerçekleştirilesi güçtür. Ancak noral progralaa bilen biri tarafından kolayca
VİNÇTE ÇELİK KONSTRÜKSİYON
 01 Mayıs VİNÇTE ÇELİK KONSTRÜKSİYON KİRİŞTE BURUŞMA 1-03 Güven KUTAY Semboller ve Kaynalar için "1_00_CeliKonstrusiyonaGiris.doc" a baınız. Koordinat esenleri "GENEL GİRİŞ" de belirtildiği gibi DIN 18800
01 Mayıs VİNÇTE ÇELİK KONSTRÜKSİYON KİRİŞTE BURUŞMA 1-03 Güven KUTAY Semboller ve Kaynalar için "1_00_CeliKonstrusiyonaGiris.doc" a baınız. Koordinat esenleri "GENEL GİRİŞ" de belirtildiği gibi DIN 18800
ÖZEL EGE LİSESİ 13. OKULLAR ARASI MATEMATİK YARIŞMASI 8. SINIF ELEME SINAVI TEST SORULARI
 1. x,y,z pozitif tam sayılardır. 1 11 x + = 8 y + z olduğuna göre, x.y.z açtır? 3 B) 4 C) 6 D)1 3 1 4. {,1,1,1,...,1 } 1 ümesinin en büyü elemanının diğer 1 elemanın toplamına oranı, hangi tam sayıya en
1. x,y,z pozitif tam sayılardır. 1 11 x + = 8 y + z olduğuna göre, x.y.z açtır? 3 B) 4 C) 6 D)1 3 1 4. {,1,1,1,...,1 } 1 ümesinin en büyü elemanının diğer 1 elemanın toplamına oranı, hangi tam sayıya en
KONTEYNER TERMİNALLERİNDE İSTİF VİNÇLERİNİN ETKİN ÇİZELGELENMESİNE YENİ BİR YAKLAŞIM
 KONTEYNER TERMİNALLERİNDE İSTİF VİNÇLERİNİN ETKİN ÇİZELGELENMESİNE YENİ BİR YAKLAŞIM ÖZET Uluslararası onteyner dağıtı ağlarının çıış apıları olan onteyner terinallerinin reabet oşullarını, terinallerin
KONTEYNER TERMİNALLERİNDE İSTİF VİNÇLERİNİN ETKİN ÇİZELGELENMESİNE YENİ BİR YAKLAŞIM ÖZET Uluslararası onteyner dağıtı ağlarının çıış apıları olan onteyner terinallerinin reabet oşullarını, terinallerin
EGE ÜNİVERSİTESİ-MÜHENDİSLİK FAKÜLTESİ-MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ 1 MK371 ISI TRANSFERİ (2+2) DERSİ
 DERSİ") EGE ÜNİVERSİESİ-MÜHENİSİK FAKÜESİ-MAKİNA MÜHENİSİĞİ BÖÜMÜ 1 MK371 ISI RANSFERİ (+ ERSİ-ÖZE BİGİER: 07 Hazırlayanlar: Yrd.oç.r.Hüeyin GÜNERHAN-Ar.Gör.Mehmet ERKEK-Ar.Gör.Abdullah YIIZ EGE ÜNİVERSİESİ-MÜHENİSİK
EGE ÜNİVERSİESİ-MÜHENİSİK FAKÜESİ-MAKİNA MÜHENİSİĞİ BÖÜMÜ 1 MK371 ISI RANSFERİ (+ ERSİ-ÖZE BİGİER: 07 Hazırlayanlar: Yrd.oç.r.Hüeyin GÜNERHAN-Ar.Gör.Mehmet ERKEK-Ar.Gör.Abdullah YIIZ EGE ÜNİVERSİESİ-MÜHENİSİK
Bu deneyin amacı Ayrık Fourier Dönüşümü (DFT) ve Hızlu Fourier Dönüşümünün (FFT) tanıtılmasıdır.
 ve Hızlu Fourier Dönüşümünün (FFT) tanıtılmasıdır.") Deney : Ayrı Fourier Dönüşümü (DFT) & Hızlı Fourier Dönüşümü (FFT) Amaç Bu deneyin amacı Ayrı Fourier Dönüşümü (DFT) ve Hızlu Fourier Dönüşümünün (FFT) tanıtılmasıdır. Giriş Bir öncei deneyde ayrı-zamanlı
Deney : Ayrı Fourier Dönüşümü (DFT) & Hızlı Fourier Dönüşümü (FFT) Amaç Bu deneyin amacı Ayrı Fourier Dönüşümü (DFT) ve Hızlu Fourier Dönüşümünün (FFT) tanıtılmasıdır. Giriş Bir öncei deneyde ayrı-zamanlı
KOMPLEKS ANALİZ (MAT 472) DERS NOTLARI
 DERS NOTLARI") KOMPLEKS AALİZ (MAT 47) DERS OTLARI Prof. Dr. AYHA ŞERBETÇİ GİRİŞ Komples düzlemde bir bölgede medana gelen bir fizisel problem örneğin ararlı drm sıcalıları eletrostati ideal sıvı aışı vs. bazı oşlların
KOMPLEKS AALİZ (MAT 47) DERS OTLARI Prof. Dr. AYHA ŞERBETÇİ GİRİŞ Komples düzlemde bir bölgede medana gelen bir fizisel problem örneğin ararlı drm sıcalıları eletrostati ideal sıvı aışı vs. bazı oşlların
Uluslararası Katılımlı 17. Makina Teorisi Sempozyumu, İzmir, Haziran 2015
 Ulslararası Katılılı 7. Makina eorisi Sepozy, İzir, 4-7 Haziran 5 Doyl Eyleyicilere Sahip bir Asietrik Yapısal Sistein itreşilerinin Doğrsal Matris Eşitsizlikleri abanlı Dr Geri Besleeli Kontrolör ile
Ulslararası Katılılı 7. Makina eorisi Sepozy, İzir, 4-7 Haziran 5 Doyl Eyleyicilere Sahip bir Asietrik Yapısal Sistein itreşilerinin Doğrsal Matris Eşitsizlikleri abanlı Dr Geri Besleeli Kontrolör ile
D( 4 6 % ) "5 2 ( 0* % 09 ) "5 2
 5 2 ( 0* % 09 ) 5 2") 3 BÖLÜM KAALI SİSEMLEDE EMODİNAMİĞİN I KANUNU I Yasaya giriş Birii bölümde eerjii edilide var veya yo edilemeyeeği vurgulamış, sadee biçim değiştirebileeği belirtilmişti Bu ile deeysel souçlara dayaır
3 BÖLÜM KAALI SİSEMLEDE EMODİNAMİĞİN I KANUNU I Yasaya giriş Birii bölümde eerjii edilide var veya yo edilemeyeeği vurgulamış, sadee biçim değiştirebileeği belirtilmişti Bu ile deeysel souçlara dayaır
Kİ KARE TESTLERİ. Biyoistatistik (Ders 2: Ki Kare Testleri) Kİ-KARE TESTLERİ. Sağlıktan Yakınma Sigara Var Yok Toplam. İçen. İçmeyen.
 Kİ-KARE TESTLERİ. Sağlıktan Yakınma Sigara Var Yok Toplam. İçen. İçmeyen.") Biyoistatisti (Ders : Ki Kare Testleri) Kİ KARE TESTLERİ Yrd. Doç. Dr. Ünal ERKORKMAZ Saarya Üniversitesi Tıp Faültesi Biyoistatisti Anabilim Dalı [email protected] Kİ-KARE TESTLERİ 1. Ki-are testleri
Biyoistatisti (Ders : Ki Kare Testleri) Kİ KARE TESTLERİ Yrd. Doç. Dr. Ünal ERKORKMAZ Saarya Üniversitesi Tıp Faültesi Biyoistatisti Anabilim Dalı [email protected] Kİ-KARE TESTLERİ 1. Ki-are testleri
Havacılık ve uzay yapılarında esneklik, hafiflik ve dayanıklılık
 MAALE Ce Onat, Melin Şahin PZT EYLEYİCİ VE ALILAYICI İÇEREN ESNE BİR ONSOL İRİŞ İÇİN ROBUST ONTROLCÜ TASARIMI VE SİMÜLASYONU Ce Onat * Doç Dr, İnönü Üniveritei, Mühendilik Fakültei, Makina Mühendiliği
MAALE Ce Onat, Melin Şahin PZT EYLEYİCİ VE ALILAYICI İÇEREN ESNE BİR ONSOL İRİŞ İÇİN ROBUST ONTROLCÜ TASARIMI VE SİMÜLASYONU Ce Onat * Doç Dr, İnönü Üniveritei, Mühendilik Fakültei, Makina Mühendiliği
BÖLÜM IV SİNÜZOİDAL KARARLI-DURUM (STEADY-STATE) ANALİZİ
 ANALİZİ") BÖLÜM IV SİNÜZOİDAL KARARLI-DURUM (STEADY-STATE) ANALİZİ Bağılı veya bağısız bir sinüzoidal kaynak, zaana bağlı olarak sinüzoidal şekilde değişen bir gerili üretir. Bu tip kaynaklara ait gerili ifadesi
BÖLÜM IV SİNÜZOİDAL KARARLI-DURUM (STEADY-STATE) ANALİZİ Bağılı veya bağısız bir sinüzoidal kaynak, zaana bağlı olarak sinüzoidal şekilde değişen bir gerili üretir. Bu tip kaynaklara ait gerili ifadesi
Deneysel Metotlara Giriş Temel Kavramlar, Analiz Yöntemleri
 Gebze Teni Üniversitesi Fizi Bölümü Deneysel Metotlara Giriş Temel Kavramlar, Analiz Yöntemleri Doğan Erbahar 2015, Gebze Bu itapçı son biraç yıldır Gebze Teni Üniversitesi Fizi Bölümü nde lisans laboratuarları
Gebze Teni Üniversitesi Fizi Bölümü Deneysel Metotlara Giriş Temel Kavramlar, Analiz Yöntemleri Doğan Erbahar 2015, Gebze Bu itapçı son biraç yıldır Gebze Teni Üniversitesi Fizi Bölümü nde lisans laboratuarları
ELEKTRİK GÜÇ SİSTEMLERİNDE SALINIM DİNAMİKLERİNİN KAOTİK OLAYLARININ İNCELENMESİ
 ELEKTRİK GÜÇ SİSTEMLERİNDE SALINIM DİNAMİKLERİNİN KAOTİK OLAYLARININ İNCELENMESİ Yılmaz Uyaroğlu M. Ali Yalçın Saarya Üniversitesi, Mühendisli Faültesi, Eletri Eletroni Mühendisliği Bölümü, Esentepe Kampüsü,
ELEKTRİK GÜÇ SİSTEMLERİNDE SALINIM DİNAMİKLERİNİN KAOTİK OLAYLARININ İNCELENMESİ Yılmaz Uyaroğlu M. Ali Yalçın Saarya Üniversitesi, Mühendisli Faültesi, Eletri Eletroni Mühendisliği Bölümü, Esentepe Kampüsü,
ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ KİMYA MÜHENDİSLİĞİ BÖLÜMÜ KMB 405 KİMYA MÜHENDİSLİĞİ LABORATUVARI - 3
 ONOKUZ MAYIS ÜNİVERSİESİ MÜHENİSLİK FAKÜLESİ KİMYA MÜHENİSLİĞİ BÖLÜMÜ KMB 405 KİMYA MÜHENİSLİĞİ LABORAUVARI - 3 ENEY 5: KABUK ÜP ISI EĞİŞİRİCİ ENEYİ (SHALL AN UBE HEA EXCHANGER) EORİ ISI RANSFERİ Isı,
ONOKUZ MAYIS ÜNİVERSİESİ MÜHENİSLİK FAKÜLESİ KİMYA MÜHENİSLİĞİ BÖLÜMÜ KMB 405 KİMYA MÜHENİSLİĞİ LABORAUVARI - 3 ENEY 5: KABUK ÜP ISI EĞİŞİRİCİ ENEYİ (SHALL AN UBE HEA EXCHANGER) EORİ ISI RANSFERİ Isı,
ANTALYA DA YENİLENEBİLİR VE ALTERNATİF ENERJİ KAYNAKLARIYLA ÖRTÜALTI TARIMSALALANIN ISITMA UYGULAMASI
 ANTALYA DA YENİLENEBİLİR VE ALTERNATİF ENERJİ AYNALARIYLA ÖRTÜALTI TARIMSALALANIN ISITMA UYGULAMASI Ali eal YAUT Erkan DİMEN Aet ABUL ÖZET Yapılan bu çalışayla, örtüaltı tarısal üretiinde Türkiye'de ilk
ANTALYA DA YENİLENEBİLİR VE ALTERNATİF ENERJİ AYNALARIYLA ÖRTÜALTI TARIMSALALANIN ISITMA UYGULAMASI Ali eal YAUT Erkan DİMEN Aet ABUL ÖZET Yapılan bu çalışayla, örtüaltı tarısal üretiinde Türkiye'de ilk
ELECO '2012 Elektrik - Elektronik ve Bilgisayar Mühendisliği Sempozyumu, 29 Kasım - 01 Aralık 2012, Bursa
 ELECO '2012 Eletri - Eletroni ve Bilgisayar Mühendisliği Sempozyumu, 29 Kasım - 01 ralı 2012, Bursa Lineer Olmayan Dinami Sistemlerin Yapay Sinir ğları ile Modellenmesinde MLP ve RBF Yapılarının Karşılaştırılması
ELECO '2012 Eletri - Eletroni ve Bilgisayar Mühendisliği Sempozyumu, 29 Kasım - 01 ralı 2012, Bursa Lineer Olmayan Dinami Sistemlerin Yapay Sinir ğları ile Modellenmesinde MLP ve RBF Yapılarının Karşılaştırılması
Sevil Şentürk Accepted: July 2010
 ISSN:1306-3111 e-jornal of New World Sciences Academy 2010, Volme: 5, Nmber: 3, Article Nmber: 3A0023 PHYSICAL SCIENCES Fatih Çemre Received: May 2009 Sevil Şentür Accepted: Jly 2010 Levent Terlemez Series
ISSN:1306-3111 e-jornal of New World Sciences Academy 2010, Volme: 5, Nmber: 3, Article Nmber: 3A0023 PHYSICAL SCIENCES Fatih Çemre Received: May 2009 Sevil Şentür Accepted: Jly 2010 Levent Terlemez Series
HİDROLİK BORU HİDROLİĞİ PROBLEMLER 1
 HİDROİK BOR HİDROİĞİ PROBEMER.) Kineatik viskoitesi ν0 - /s olan bir sıvı çapı 0. olan cidarları yeterince cilalı olan boruda akıtılaktadır. Borunun 00 sinde basınç yükü farkı olduğuna göre akıın ortalaa
HİDROİK BOR HİDROİĞİ PROBEMER.) Kineatik viskoitesi ν0 - /s olan bir sıvı çapı 0. olan cidarları yeterince cilalı olan boruda akıtılaktadır. Borunun 00 sinde basınç yükü farkı olduğuna göre akıın ortalaa
Dijital Kontrol Sistemleri Prof.Dr. Ayhan Özdemir. Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir.
 Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
BASINÇ BİRİMLERİ. 1 Atm = 760 mmhg = 760 Torr
 BASINÇ BİRİMLERİ - Sıı Sütunu Cinsinden anılanan Biriler:.- orr: C 'de yüseliğindei cıa sütununun tabanına yaış olduğu basınç bir torr'dur..- SS: + C 'de yüseliğindei su sütununun tabanına yaış olduğu
BASINÇ BİRİMLERİ - Sıı Sütunu Cinsinden anılanan Biriler:.- orr: C 'de yüseliğindei cıa sütununun tabanına yaış olduğu basınç bir torr'dur..- SS: + C 'de yüseliğindei su sütununun tabanına yaış olduğu
MIXED REGRESYON TAHMİN EDİCİLERİNİN KARŞILAŞTIRILMASI. The Comparisions of Mixed Regression Estimators *
 MIXED EGESYON TAHMİN EDİCİLEİNİN KAŞILAŞTIILMASI The Comparisions o Mixed egression Estimators * Sevgi AKGÜNEŞ KESTİ Ç.Ü.Fen Bilimleri Enstitüsü Matemati Anabilim Dalı Selahattin KAÇIANLA Ç.Ü.Fen Edebiyat
MIXED EGESYON TAHMİN EDİCİLEİNİN KAŞILAŞTIILMASI The Comparisions o Mixed egression Estimators * Sevgi AKGÜNEŞ KESTİ Ç.Ü.Fen Bilimleri Enstitüsü Matemati Anabilim Dalı Selahattin KAÇIANLA Ç.Ü.Fen Edebiyat
SOĞUK ŞEKĐLLENDĐRĐLMĐŞ ÖN AKS GÖVDESĐNĐN SONLU ELEMANLAR ANALĐZĐ YARDIMIYLA MEKANĐK TASARIMI
 OTEKON 2010 5. Otootiv Tenolojileri Kongresi 07 08 Haziran 2010, BURSA SOĞUK ŞEKĐLLENDĐRĐLMĐŞ ÖN AKS GÖVDESĐNĐN SONLU ELEMANLAR ANALĐZĐ YARDIMIYLA MEKANĐK TASARIMI Hasan Günal *, N. Sefa Kuralay **, M.
OTEKON 2010 5. Otootiv Tenolojileri Kongresi 07 08 Haziran 2010, BURSA SOĞUK ŞEKĐLLENDĐRĐLMĐŞ ÖN AKS GÖVDESĐNĐN SONLU ELEMANLAR ANALĐZĐ YARDIMIYLA MEKANĐK TASARIMI Hasan Günal *, N. Sefa Kuralay **, M.
A Statistical Study for Determination of Surface Roughness of AISI 304 Stainless Steel and EN 5754 Aluminum Alloy Machined by Fiber Laser
 Makine Teknolojileri Elektronik Dergisi Cilt: 8, o:, 0 7-6 Electronic Journal of Machine Technologies Vol: 8, o:, 0 7-6 TEKOLOJĐK ARAŞTIRMALAR www.teknolojikarastiralar.co e-i:04-44 Makale Article AII
Makine Teknolojileri Elektronik Dergisi Cilt: 8, o:, 0 7-6 Electronic Journal of Machine Technologies Vol: 8, o:, 0 7-6 TEKOLOJĐK ARAŞTIRMALAR www.teknolojikarastiralar.co e-i:04-44 Makale Article AII
Cahit Arf Liseler Arası Matematik Yarışması 2008
 Cahit Arf Liseler Arası Matemati Yarışması 2008 İinci Aşama 11 Mayıs 2008 Notlar: Birnci tasla. 1. Tamsayılardan gerçel sayılara tanımlı fonsiyonlar ümesi üzerinde şöyle bir operatörü tanımlayalım: f(x)
Cahit Arf Liseler Arası Matemati Yarışması 2008 İinci Aşama 11 Mayıs 2008 Notlar: Birnci tasla. 1. Tamsayılardan gerçel sayılara tanımlı fonsiyonlar ümesi üzerinde şöyle bir operatörü tanımlayalım: f(x)
BÖLÜM 6 GERÇEK AKIŞKANLARIN HAREKETİ
 BÖLÜM 6 GERÇEK AKIŞKANLARIN HAREKETİ Gerçek akışkanın davranışı viskoziteden dolayı meydana gelen ilave etkiler nedeniyle ideal akışkan akımlarına göre daha karmaşık yapıdadır. Gerçek akışkanlar hareket
BÖLÜM 6 GERÇEK AKIŞKANLARIN HAREKETİ Gerçek akışkanın davranışı viskoziteden dolayı meydana gelen ilave etkiler nedeniyle ideal akışkan akımlarına göre daha karmaşık yapıdadır. Gerçek akışkanlar hareket
Stokastik Süreçler. Bir stokastik Süreç ya da rastgele süreç şöyle tanımlanabilir.
 Stoasti Süreçler Bir stoasti Süreç ya da rastgele süreç şöyle tanımlanabilir. Zamanla değişen bir rastgele değişendir. Rastgele değişenin alacağı değer zamanla değişmetedir. Deney çıtılarına atanan rastgele
Stoasti Süreçler Bir stoasti Süreç ya da rastgele süreç şöyle tanımlanabilir. Zamanla değişen bir rastgele değişendir. Rastgele değişenin alacağı değer zamanla değişmetedir. Deney çıtılarına atanan rastgele
BİYOCAĞRAFYA TABANLI OPTİMİZASYON METODU KULLANARAK ASENKRON MOTOR PARAMETRE TAHMİNİ
 İleri Teknoloji Bilileri Dergisi Cilt, Sayı, 46-54, 03 Journal of Advanced Technology Sciences Vol, No, 46-54, 03 BİYOCAĞRAFYA TABANLI OPTİMİZASYON METODU KULLANARAK ASENKRON MOTOR PARAMETRE TAHMİNİ Bilal
İleri Teknoloji Bilileri Dergisi Cilt, Sayı, 46-54, 03 Journal of Advanced Technology Sciences Vol, No, 46-54, 03 BİYOCAĞRAFYA TABANLI OPTİMİZASYON METODU KULLANARAK ASENKRON MOTOR PARAMETRE TAHMİNİ Bilal
KÜÇÜK TİTREŞİMLER U x U x U x x x x x x x...
 36 KÜÇÜK TİTREŞİMLER A) HARMONİK OSİLATÖRLER B) LAGRANGE FONKSİYONU C) MATRİS GÖSTERİMİ D) TİTREŞİM FREKANSLARI E) ÖRNEKLER F) SONLU GRUPLAR VE TEMSİLLERİ G) METOT H) ÖRNEKLER - - - - - - - - - - - - -
36 KÜÇÜK TİTREŞİMLER A) HARMONİK OSİLATÖRLER B) LAGRANGE FONKSİYONU C) MATRİS GÖSTERİMİ D) TİTREŞİM FREKANSLARI E) ÖRNEKLER F) SONLU GRUPLAR VE TEMSİLLERİ G) METOT H) ÖRNEKLER - - - - - - - - - - - - -
MODEL SORU - 1 DEKİ SORULARIN ÇÖZÜMLERİ
 BÖÜ DİNAİ ODE SORU - 1 DEİ SORUARIN ÇÖZÜERİ 1 ( ) (+) 0N 6/s 6/s 60 10N N 10N 0N 1N cis i uy gu l nn net kuv vet cis i ön ce (+) yön de y vş l tır Ci si dur duk tn son r ( ) yön de hız l nır Cis in iv
BÖÜ DİNAİ ODE SORU - 1 DEİ SORUARIN ÇÖZÜERİ 1 ( ) (+) 0N 6/s 6/s 60 10N N 10N 0N 1N cis i uy gu l nn net kuv vet cis i ön ce (+) yön de y vş l tır Ci si dur duk tn son r ( ) yön de hız l nır Cis in iv
BELİRSİZLİK İÇEREN SİSTEMLERİN GUTMAN-HAGANDER METODUYLA KONTROLÜ
 BELİRSİZLİK İÇEREN SİSEMLERİN GUMAN-HAGANDER MEODUYLA KONROLÜ İhsan BAYIR Ahmet UÇAR Dile Üniversitesi, Mühendislik Mimarlık Fakültesi, Elektrik -Elektronik Mühendisliği Bölümü, Diyarbakır Fırat Üniversitesi,
BELİRSİZLİK İÇEREN SİSEMLERİN GUMAN-HAGANDER MEODUYLA KONROLÜ İhsan BAYIR Ahmet UÇAR Dile Üniversitesi, Mühendislik Mimarlık Fakültesi, Elektrik -Elektronik Mühendisliği Bölümü, Diyarbakır Fırat Üniversitesi,
Özel Laboratuvar Deney Föyü
 Özel Laboratvar Deney Föyü Deney Adı: Mikrokanatlı borlarda türbülanslı akış Deney Amacı: Düşey konmdaki iç yüzeyi mikrokanatlı bordaki akış karakteristiklerinin belirlenmesi 1 Mikrokanatlı Bor ile İlgili
Özel Laboratvar Deney Föyü Deney Adı: Mikrokanatlı borlarda türbülanslı akış Deney Amacı: Düşey konmdaki iç yüzeyi mikrokanatlı bordaki akış karakteristiklerinin belirlenmesi 1 Mikrokanatlı Bor ile İlgili
KONTROL SİSTEMLERİ YIL İÇİ UYGULAMA. Problem No
 KONTRO SİSTEMERİ YI İÇİ UYGUAMA Problem No AD SOYAD 10 haneli öğrenci NO Şeil 1 Şeil 1 dei sistem için transfer fonsiyonunu bulalım. Sistem ii serbestli derecesine sahiptir.her bir ütle diğerinin sabit
KONTRO SİSTEMERİ YI İÇİ UYGUAMA Problem No AD SOYAD 10 haneli öğrenci NO Şeil 1 Şeil 1 dei sistem için transfer fonsiyonunu bulalım. Sistem ii serbestli derecesine sahiptir.her bir ütle diğerinin sabit
MAK341 MAKİNA ELEMANLARI I 2. Yarıyıl içi imtihanı 24/04/2012 Müddet: 90 dakika Ögretim Üyesi: Prof.Dr. Hikmet Kocabas, Doç.Dr.
 MAK3 MAKİNA EEMANARI I. Yarıyıl içi imtihanı /0/0 Müddet: 90 daia Ögretim Üyesi: Prof.Dr. Himet Kocabas, Doç.Dr. Cemal Bayara. (0 puan) Sıı geçmelerde sürtünme orozyonu nasıl ve neden meydana gelir? Geçmeye
MAK3 MAKİNA EEMANARI I. Yarıyıl içi imtihanı /0/0 Müddet: 90 daia Ögretim Üyesi: Prof.Dr. Himet Kocabas, Doç.Dr. Cemal Bayara. (0 puan) Sıı geçmelerde sürtünme orozyonu nasıl ve neden meydana gelir? Geçmeye
Pamukkale Üniversitesi Mühendislik Bilimleri Dergisi. Pamukkale University Journal of Engineering Sciences
 Paukkale Üniversitesi Mühendislik Bilileri Dergisi Paukkale University Journal of Engineering Sciences ÇOK KRİTERLİ ABC ANALİZİ PROBLEMİNE FARKLI BİR BAKIŞ AÇISI: BULANIK ANALİTİK HİYERARŞİ PROSESİ - İDEAL
Paukkale Üniversitesi Mühendislik Bilileri Dergisi Paukkale University Journal of Engineering Sciences ÇOK KRİTERLİ ABC ANALİZİ PROBLEMİNE FARKLI BİR BAKIŞ AÇISI: BULANIK ANALİTİK HİYERARŞİ PROSESİ - İDEAL
c) Geçme tipi şekil 19 dan belirlenir. Önce şekil 18 den kayma hızı ve ortalama yatak basıncına göre relatif yatak boşluk değeri seçilir.
 Geçme tipi şekil 19 dan belirlenir. Önce şekil 18 den kayma hızı ve ortalama yatak basıncına göre relatif yatak boşluk değeri seçilir.") Örnek: Bir jeneratörün kayalı yatağına F=18 kn luk radyal yük n=15 D/d da etki etektedir. Mil çapı d=8 dir. Aşağıdaki değerleri belirleyiniz ve kontrol ediniz. a)uygun yatak alzeesi (Türbin jeneratörü
Örnek: Bir jeneratörün kayalı yatağına F=18 kn luk radyal yük n=15 D/d da etki etektedir. Mil çapı d=8 dir. Aşağıdaki değerleri belirleyiniz ve kontrol ediniz. a)uygun yatak alzeesi (Türbin jeneratörü
220-230V / 50 /1. 280/310/350/400 32/35/37/40 255x730x174 8 340x793x248 10.5. 660 540x712x257 31 595x823x358 34 1/4-3/8 15 10 10 5 20
 Klialar 3 Serisi Klia 3 Serisi Klia R-4a soğutucu akışkan Jet Cool özelliği nti bakteriyel iç yapı Sıcak kalkış odu LCD display Proa saati uto restart Uyku odu Düşük ses seviyesi ntifriz özelliği Çevre
Klialar 3 Serisi Klia 3 Serisi Klia R-4a soğutucu akışkan Jet Cool özelliği nti bakteriyel iç yapı Sıcak kalkış odu LCD display Proa saati uto restart Uyku odu Düşük ses seviyesi ntifriz özelliği Çevre
BİL 810 İnşaat Mühendisliğinde Bilgisayar Uygulamaları
 BİL 810 İnşaat Mühendisliğinde Bilgisayar Uygulamaları Excel ile grafik kullanımı (Yüzey Grafiği) Siyah-Beyaz çıktı için işaretleyici şeklinin değiştirilmesi Excel ile Çizilmiş Grafiğin Word e ile kullanılması
BİL 810 İnşaat Mühendisliğinde Bilgisayar Uygulamaları Excel ile grafik kullanımı (Yüzey Grafiği) Siyah-Beyaz çıktı için işaretleyici şeklinin değiştirilmesi Excel ile Çizilmiş Grafiğin Word e ile kullanılması