Robotik Sistemlerine Giriş. Yard. Doç. Dr. Hasan TİRYAKİ
|
|
|
- Serhat Ilhami Kurt
- 7 yıl önce
- İzleme sayısı:
Transkript


1 Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ

2 Ders Planı


3 Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen çok fonksiyonlu makinedir.
4 Robotik - Tarihçe Robot fikri ve kavramı, yunan mitolojisine kadar dayanan bir olgudur. Günümüzde robotik alanında kullanılan mekanik sistemlerin çoğunun temeli antik yunan zamanlarına dayanmaktadır. İlk dizayn olarak, Leonardo da Vinci nin 1945 yılında sözde ortaya çıkardığı insansı robot (humanoid robot) dizaynı kabul edilebilir. Söz konusu dizayndaki yapı, el sallama, oturma kalkma, hareketli boyun bölgesi gibi esasları içermektedir.

5 Robotik - Tarihçe Robot sözcüğü, ilk olarak 1921 yılında bir tiyatro oyununda Çek Cumhuriyeti vatandaşı yazar Karel Capek tarafından kullanılmıştır. (Oyunun konusu ise, insanın robotu buluşu sonrası, robotun insanı yok edişiydi.)

6 Robotik - Tarihçe yıllarında, Westinghouse şirketi ELEKTRO adlı ürünü ortaya çıkardı. Söz konusu insansı robot yürüyebiliyor, konuşabiliyor ve sigara içebiliyordu. ELEKTRO adlı robot 1939 Dünya Bilişim Fuarı nda sergilendi yılında bilim kurgu yazarı Isaac Asimov robotik teknolojisini ifade ederken robot kelimesini kullanmış, söz konusu teknolojinin gelecek nesillerin odağı olacağını belirtmiştir.
7 Robotik - Tarihçe 1942 yılında yine yazar Isaac Asimov, Robotiğin Üç Yasası adlı taslağı bilim kamuoyuna sunmuştur. Söz konusu üç yasaya sonradan bir adet ekleme de (literatürde law zero olarak geçmektedir.) yapılmıştır. Kural 1: Herhangi bir robot, insanlara ve insanlığa zarar verme amaçlı dizayn edilemez. Kural 2: Robot, verilen komuta, ortada daha yüksek dereceli bir emir yoksa uymak zorundadır. Kural 3: Robot, ortada daha yüksek dereceden bir emir yoksa, kendi var oluşunu korumak ile yükümlüdür.
8 Robotik - Tarihçe 1948 yılında, William Grey Walter, bataryası belirlenen kritik seviyeye düştüğünde kendi şarj istasyonunu herhangi bir müdahale olmadan bulabilen bir robot yapmıştır. İlk gerçek anlamda programlanabilir robot, 1954 yılında George Devol tarafından gerçeklenmiştir. (US patent ) Rusya, 4 Ekim 1957 de önemli bir ilke imza atmış, ilk yapay otonom uydu olan Sputnik-1 i başarı ile yörüngeye oturtmuştur.

9 Sputnik-1. Ağırlık : 80 kg. Çap : 58 cm.

10 Robotik - Tarihçe 1964 yılında M.I.T. ve Stanford Üniversitesi nde ilk yapay zeka laboratuvarları açıldı yılında, Ichiro Kato tarafından gerçeklenen WABOT-1 adlı robot, ortalama 1,5 yaşında bir çocuğun zekasına sahip robot olarak tarihte kendine yer buldu yılında Shigeo Hirose tarafından yapılan Titan II adlı robot, merdiven inip çıkma yeteneğine sahip ilk robot oldu. WABOT-1
11 Robotik - Tarihçe 1988 yılında, HelpMate adlı robot, Danbury Hastanesi nde çalışmaya başladı. Bu durum robotiğin medikale girişi olarak kabul edilir yılında Rodney Brooks tarafından kurulan irobot firması, askeri alanda robotik faaliyeti gerçekleştiren ilk robotik kuruluşu oldu yılında Honda firması, gelecekte üreteceği ASIMO adlı robotun temellerini P2 adlı robotun üretimi ile attı.
12 Robotik - Tarihçe 1997 yılında, NASA nın ürettiği Pathfinder adlı robot Mars a gönderildi, bu proje sayesinde Mars hakkında detaylı data ve fotoğraf elde edildi. Yine 1997 yılında, IBM in ürettiği Deep Blue süper bilgisayarı Dünya tarihinin önde gelen satranç ustalarından biri olarak kabul edilen Gary Kasparov u yendi. Bu durum bir ilk olarak tarihte yerini aldı yılının son dönemlerinde Honda, P3 adlı robotunu sergiledi. Söz konusu robot Dünya da ilk tam-otonom insansı robot olma niteliğini taşımaktadır.


13 Robotik - Tarihçe 1998 yılında LEGO firması Mindstorms Robotik adı altında ürünlerini piyasaya sundu. (Söz konusu ürünün bir versiyonu okulumuzda bulunmaktadır.) 1998 yılında Sony, ilk robotik köpeği piyasaya sunmuştur.
14 Robotik - Tarihçe 2002 yılında, uzun süredir temellerini oluşturduğu robotunu tamamen geliştiren Honda, ASIMO yu Dünya ya sundu li yıllarda ilk otonom ev temizleme robotları (elektrik süpürgesi, paspas gibi işleri gerçekleyen robot tipleri.) piyasaya sunuldu.
15 Robotik - Tarihçe yılları arasında Cornell Üniversitesi kendini kopyalayabilen robot üretimini başardı. (self replication. Tek hücrelilerde üreme...)

16 Endüstriyel Robot Kavramı ISO 8373 Standardına göre belirlenmiş endüstriyel robot tanımı ve robot tiplerinin sınıflandırılması şöyledir: "Endüstriyel uygulamalarda kullanılan, üç veya daha fazla programlanabilir ekseni olan, otomatik kontrollü, yeniden programlanabilir, çok amaçlı, uzayda sabitlenmiş veya hareketli manipülatördür."

17 Neden Robot? 1) Üretim maliyetinin düşmesi 1a. İşçi maliyeti unsuru 1b. Verim 1c. Toplam kalitede artış 1d. Kısa amortisman süresi

18 Neden Robot? 2) Üretim Artışı 2a. İnsanlara göre daha hızlı çalışma 2b. Çalışma süresinde artış

19 Neden Robot? 3) Üretim Kalitesinde Artış 3a. Pozisyon doğruluğu (Örn: mevcut çalışmanın 0.01 mm de tekrarlanabilirliği ; cerrahide kullanılan robotlar vs.)

20 Neden Robot? 4) Tehlikeli Ortamlarda Çalışabilme 4a. Radyoaktif ortamlarda yapılan çalışmalar, zehirli boya kullanımı vs. 4b. Sualtı, uzay, düşman bölgesinde araştırma tarama insana zarar verme ihtimali olan tabiatlar.
 yanlış veri varsa sürekli yanlış ürünü verirler.")
21 Dezavantajlar... İşgücünü çok ucuzlattıklarından dolayı işssizliği arttırabilirler. Rutin işlemlerde (Fabrikasyon vs) yanlış veri varsa sürekli yanlış ürünü verirler. Askeri alandaki kullanımları - kitle imha silahı işlevi. Teknik donanımlarının karmaşıklığı boyutu.


22 Otomasyon ve Robotlar Şişeleme Makinaları, Bulaşık Makinaları, Boya Püskürtme vs. Farklı görevleri gerçekleştirebilen robotlar; seç yerleştir, gezgin robotlar, sayısal kontrol makinaları vs.

23 Manipülatör Kavramı Manipülatör nedir? Manipüle eden, değiştiren, etkileyen. Bir cismi ya da belirlenen bir işi, hedefi, uzayda istenen bir duruma, konuma getiren yapı.
 : Menteşeye benzer iki uzuv")
 : İki uzuv arasında")
24 Manipülatörlerin Sınıflandırılması Döner (Revolute R) : Menteşeye benzer iki uzuv arasında dönme hareketine izin verir. Kayar (Prismatic P) : İki uzuv arasında doğrusal harekete izin verir.
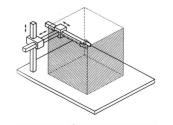
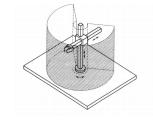
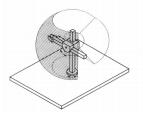
25 Manipülatörlerin Sınıflandırılması Kartezyen (Cartesian) Silindirik (Cylindirical) Küresel (Spherical)
 İnsan Kolu")
26 Manipülatörlerin Sınıflandırılması Eklemli (Articulated) İnsan Kolu Modeli
27 Manipülatörlerin Özellikleri Robot Tipi Eklem Tipleri (3 Eklem) Kullanım Alanları Kartezyen Robot Kollar Silindirik Robot Kollar Küresel Robot Kollar Eklemli Robot Kollar Prizmatik Prizmatik Prizmatik Dönel Prizmatik Prizmatik Dönel Dönel Prizmatik Dönel Dönel Dönel Demiryolu köprü inşaatları, büyük makine montajları Büyük makine montaj sanayi, basit montaj & demontaj hatları Montaj sanayi, nükleer santraller Otomobil sanayi, boya sanayi, elektronik montaj sanayi, tıbbi araç gereç yapımı
28 Robot Tipi Kartezyen Robot Kollar Silindirik Robot Kollar Küresel Robot Kollar Avantajlar Kinematik modelleri basittir Katı bir gövdeye sahiptir Hareket analizi basittir Kinematik modelleri basittir Hareket analizi basittir Güçlü hidrolik elemanlar kullanılır Büyük alanlara uzanabilirler Zeminden uzaktaki nesneleri tutabilirler Dezavantajlar Büyük çalışma alanı Yapının büyüklüğüne rağmen iş alanı ufaktır İş alanları sınırlıdır Tozlu veya ıslak ortamlarda çalışma sorunu Kinematik modelleri karışıktır Hareket analizleri zordur Eklemli Robot Kollar Maksimum esnekliğe sahiptir İş alanı robot büyüklüğü ile orantılıdır Elektrik motorları kullanılabilir Cisimlere altlarından ulaşabilirler Kinematik modelleri karmaşıktır Hareket analizleri zordur


29 Sensör nedir? Dış dünya ile ilgili istenen türde veri elde edilmesine olanak veren yapılardır.
 Isı Ses gibi durumlara ilişkin sensörler Ses")
30 Robotikte Sensör Çeşitleri Yönlenme Hareket (Orientation & Heading ex: gyroscope) Engel Cisim bulma (Obstacle Detection) Isı Ses gibi durumlara ilişkin sensörler Ses sensörü

 olarak")
31 Kızılötesi (Infrared) Engel Sensörü Çalışma prensibi, 0-1 lojik mantığı geçerli olmak üzere, 0 durumu: Kızılötesi ışın sensöre herhangi bir cisim üzerinde yansıma yapıp geri dönüyorsa (engel var), 1 durumu: Kızılötesi ışın sensöre herhangi bir cisim üzerinde yansıma yapmamasından dolayı geri dönmüyorsa (engel yok) olarak açıklanabilir.
")

32 Kızılötesi (Infrared) Engel Sensörü 0 Durumu: 1 Durumu:
 Jiroskop. Denge.")
33 Yönelme Hareket sensörlerinden birini ele alalım... Örneğin, (Gyroscope) Jiroskop. Denge. Nasıl çalışıyordur?
: http://new.abb.")
: http://new.abb.")
34 Robot Studio Programı Link 1 (Ürün Deneme Sürümü (30 gün) İndirme Linki): Link 2 (Kullanım Kılavuzunun Bulunduğu Link):

35 Robot Studio Programı İndirme Sayfası

36 Robot Studio Programı Kullanım Kılavuzu
37 Robotlar - Genel Çalışma Prensibi Robot kompanentleri ve objeler, birbirleri ile, belirlenen koordinat birimine göre etkileşime girer. Söz konusu koordinat birimi genelde 3 boyutlu (XYZ) koordinat birimi olarak seçilir ve söz konusu birim üzerinden tanımlanan pozisyonlar ile matris kullanılarak işlemler gerçeklenir.
38 Robotlar - Genel Çalışma Prensibi Robotlar her bir özgürlük derecesi için bir küresel(global) bir yerel(local) koordinat sistemine sahiptirler. Global koordinat sistemi robot üzerinde sabit bir noktaya bağlıdır, veya çalışma uzayında uygun bir noktadadır.
39 Robotlar - Genel Çalışma Prensibi

40 Koordinat Çerçeveleri (Coordinate Frames) İki çerçeve(frame) arasında kinematik ilişki mevcuttur, bu ilişki dönüşüm ve ötelemedir. Söz konusu ilişki homojen dönüşüm matrisleri ile matematiksel olarak modellenir.
41 Yanda verilen (x,y) noktasını, (x,y ) koordinatına taşıyalım. Söz konusu işlemi, x =tx + x y =ty + y şeklinde ifade edecek olursak, tx ve ty değerleri ilgili koordinatların taşınma miktarı olacaktır.
42 Bu taşıma işlemini homojen koordinat kullanarak yapmamız da mümkündür. Bunun için homojen koordinatlarda (homogenous coordinates) bir dönüşüm matrisi (transformation matrix) oluşturmamız gerekir. Temel olarak dönüşüm matrislerindeki amaç noktaya çarpan olarak gelebilmesidir.
43 Sonuç olarak bu yöntem ile, P = T x P şeklinde bütün T dönüşüm matrislerini orjinal noktamız olan P ile çarparak P noktasını elde etmek isteriz. Örnek verdiğimiz taşıma işleminde bu durum toplama olarak yapılmaktadır. Yani, P = T + P şeklinde formülize edilmiştir. Öyleyse yukarıdaki bu *tx,ty+ matrisini homojen koordinatlara uygun hale getirmemiz gerekir.
44 Yandaki matrisi P noktası ile çarparsak elde edeceğimiz sonuç formülü de aslında toplama işlemidir. Söz konusu işlem, P = T x P olarak formülize edilip işlem sonuçlandırılırsa: 1 0 tx 0 1 ty x= x +tx y= y +ty elde edilir.
45 Taşıma işlemine benzer olarak, döndürme (Rotation) işlemi de uygulanabilir.
46 Yandaki cismin homojen dönüşüm matrisini çıkaralım.
47 x y z 0 = a11 a12 a13 x a21 a22 a23 y a31 a32 a33 z 1 Genel formatı ile düşünülecek olursa,
48 x 0 = a 11. x 1 + a 12. y 1 + a 13. z 1 y 0 = a 21. x 1 + a 22. y 1 + a 23. z 1 z 0 = a 31. x 1 + a 32. y 1 + a 33. z 1 Denklemlerinden matris elemanlarının karşılıkları elde edilir.
49 İşlemlere devam edersek, x 0 = cosθ. x 1 + -sinθ. y 1 y 0 = sinθ. x 1 + cosθ. y 1 z 0 = 1. z 1 denklemleri elde edilir.
50 x y z 0 = cosθ sinθ 0 sinθ cosθ x y z 1 şeklinde bir 3x3 homojen dönüşüm matrisi elde edilir.

51 Homojen Dönüşüm Genel Format XYZ Düzlemi için, dönüşüm matrisi & öteleme matrisi şu formattadır.
52 Euler Açıları Euler in rotasyon teoremine göre, herhangi bir rotasyon durumu 3 kilit açı ile açıklanabilir.
53 Euler Açıları Sözü edilen 3 açı, Roll Yaw Pitch açılarıdır. Üç eksende dönme matrisleri tanımlandıktan sonra, bu matrislerin çarpımı ile toplam dönme hareketi, R 0 tanımlanmış olur. 1
54 Dönme Hareketinin Açıklanması Euler Açıları Tahmin edilebileceği üzere, farklı düzlemlerde farklı açılar ile çeşitli dönme kombinasyonları ortaya çıkabilir. Toplam dönme-öteleme hareketi, her bir düzlem için elde edilen dönme matrislerinin eşdeğerinin bulunması ile elde edilir.
55 Sisteminde, sırasıyla, Z düzlemi etrafında φ açısı, ardından Y düzlemi etrafında θ açısı ve son olarak Z düzleminde ψ açısı ile dönme hareketi, şu şekilde ifade edilebilir;
56
57 Öteleme Homojen Dönüşüm, genel format slaytında gösterildiği üzere, ilgili matris, varsa dönme matrisi ile birlikte denklem seti olarak yazılır. (Dönme hareketi yoksa, tahmin edilebileceği üzere, dönme matrisi yerine birim matris yazılacaktır...)

58 Öteleme Matrisi Formatı Öteleme hareketini ifade edecek değer şu şekilde olacaktır;

59 Toplam Hareket Özeti
60 Ödev Derste örneği işlenen sistemde, diğer kombinasyonların dönüşüm matrislerini elde ediniz. (R (ψ) vs vs. 3 Düzlemin her biri için 3 farklı dönme hareketi olabilir...) y

61 Örnek Öteleme İşlemleri... (Görüldüğü üzere, bir dönme hareketi olmadığında, birim matris kullanılmış... a 41, a 42, a 43, a 44 satırı, literatürde global ölçek olarak tanımlanır.)
62 Kinematik Analiz ve Pozisyon Belirleme İleri Yön (Düz) Manipülatör Kinematiği Ters Manipülatör Kinematiği
63 İleri Yön (Düz) Manipülatör Kinematiği Konunun çözümlenmesinde, iki çeşit yaklaşım mevcuttur. 1) Geometrik Yaklaşım: Bu yaklaşımda manipülatör durumuna bağlı olarak oluşan geometrik şekilden yararlanılmaktadır. 2) Cebirsel Yaklaşım: Bu yaklaşımda manipülatörün parametreleri ve eklem değişkenleri arasındaki cebirsel ilişkiden yararlanılmaktadır.
64 İleri Yön (Düz) Manipülatör Kinematiği Geometrik Yaklaşım Aşağıda verilen iki boyutlu düzlemde hareket eden bir robot kolunun ileri yön kinematiğini Geometrik Yaklaşım ile inceleyelim.
65 İleri Yön (Düz) Manipülatör Kinematiği Geometrik Yaklaşım Öncelikle robotun iki boyutlu düzlemde aldığı biçim / konum / şekil çizilerek uç işlevcisini ifade eden P noktasının konumu belirlenir.
66 İleri Yön (Düz) Manipülatör Kinematiği Geometrik Yaklaşım Ardından, P noktasının X eksenindeki izdüşümü (P x ) ve Y eksenindeki izdüşümü (P y ) hesaplanır.
67 İleri Yön (Düz) Manipülatör Kinematiği Geometrik Yaklaşım Bu durumda P x ve P y, P x = L 1.cosθ 1 + L 2.cos(θ 1 + θ 2 ) + L 3.cos(θ 1 + θ 2 + θ 3 ) P y = L 1.sinθ 1 + L 2.sin(θ 1 + θ 2 ) + L 3.sin(θ 1 + θ 2 + θ 3 ) olarak elde edilir.
68 İleri Yön (Düz) Manipülatör Kinematiği Bir robot, ana çerçevesinden araç çerçevesine doğru birbirine prizmatik veya döner eklemlerle bağlanmış seri eklemlerden oluşur. İki eklem arasındaki ilişki bir homojen dönüşüm matrisiyle açıklanır. Eklem dönüşüm matrislerinin ard arda çarpılmasıyla ana çerçeve ile araç çerçeve arasındaki ilişki tanımlanır. Bu ilişki manipülatörün araç çerçevesinin konumunu ve yönelimini ana çerçeveye göre belirtir. (Çerçeve, literatürde FRAME olarak geçmektedir...)
69 İleri Yön (Düz) Manipülatör Kinematiği İleri Yön (Düz) Kinematiği eklem denklemleri ile uç işlevcisinin konumu ve yönelimini ana çerçeveye göre hesaplar diyebiliriz. Her bir ekleme bir koordinat sistemi yerleştirilse komşu iki eklem i-1 arasındaki ilişki bir T dönüşüm matrisiyle elde edilir. i
70 İleri Yön (Düz) Manipülatör Kinematiği İlk ekleme ait dönüşüm matrisi, ilk eklem ile ana çerçeve arasındaki ilişkiyi tanımlarken, son ekleme ait dönüşüm matrisi uç işlevcisi ile son eklem arasındaki ilişkiyi ifade eder. Arka arkaya sıralanan bu eklem dönüşüm matrisleriyle ana çerçeve ile araç çerçevesi arasındaki ilişki tanımlanır. Bu ilişkiye de İleri Yön (Düz) Manipülatör Kinematiği adı verilir.
71 İleri Yön (Düz) Manipülatör Kinematiği Matematiksel olarak ifade etmek gerekirse, ana çerçeve ile araç çerçevesi arasındaki ilişki şu şekilde tanımlanabilir;
72 İleri Yön (Düz) Manipülatör Kinematiği Bu dönüşüm kolay gibi görünse de her bir eklem için koordinat çerçevesinin yerleştirilmesi ve birbirlerine göre durumlarının yorumlanması karmaşaya yol açmaktadır. Denavit ve Hartenberg 1955 yılında bu sorunu çözmek için sistematik bir yöntem önermişlerdir.
73 Denativ-Hartenberg Yöntemi Bu yöntemde dört ana değişken (Literatürde D-H Değişkeni / D-H Variables olarak geçmektedir...) kullanılarak robot kinematiği çıkarılır. Söz konusu değişkenler; 1. İki eksen arasındaki uzuv uzunluğu 2. İki komşu eksen arasındaki eksen açısı olan α i-1 3. Üst üste çıkan bağlar arasındaki eklem kayması (Literatürde eklem açıklığı olarak da geçmektedir.) olan d i 4. İki komşu uzuv arasındaki eklem açısı olan θ i-1 olarak tanımlanmıştır.
74 Denativ-Hartenberg Yöntemi 1. Öncelikle eklem eksenleri dönme veya kayma yönleri belirlenir ve bu eksene paralel bir doğru çizilir. 2. Bu işlem gerçekleştirilirken eklem eksenleri, döner eksenler için dönme yönü Z, prizmatik eklemler için kayma yönü Z ekseni olarak belirlenir. 3. Z eksenine dik ve kol boyunca olan bağ (eklem) uzuluğu X ekseni olarak kabul edilir. 4. Z ve X eksenleri belirlendikten sonra sağ el kuralına göre Y ekseni bulunur. 5. Eğer arka arkaya gelen 2 eklemin dönme veya kayma yönleri aynı ise Z ekseni belirlendikten sonra kol boyunca X ekseni belirlenir. Son olarak sağ el kuralına göre Y ekseni belirlenir ve 1. eksenler üst üste kabul edilebilir. 7. Bir seri robotun eklemine koordinat sistemleri yerleştirilirken 1. eksenin dönme yönü Z ekseni olarak belirlendikten sonra genellikle bu eksene X eksenince döndürüldüğünde komşu iki Z ekseni çakışacak şekilde bir X ekseni yerleştirilir.

75 Denativ-Hartenberg Yöntemi Bu değişkenleri belirlemek için öncelikli olarak yanda görüldüğü gibi robotun dönme eksenleri belirlenir ve dönme eksenleri uzuvlardan bir fazla olacak şekilde numaralandırılır.

76 Denativ-Hartenberg Yöntemi Daha sonra bu eksenlerin her birine bir koordinat sistemi yerleştirilir ve uzuv dönme ekseni yanda görüldüğü üzere koordinat sisteminin Z ekseni olarak kabul edilir.
 uzunluğu adı verilir.")
77 Denativ-Hartenberg Yöntemi Yandaki şekil incelenirse, x i-1 yönünde uzanan z i-1 ile z i eksenleri arasındaki dik uzaklığa a i-1 uzuv (eklem) uzunluğu adı verilir.

78 Denativ-Hartenberg Yöntemi Yandaki şekilde görüldüğü üzere, z i yönünde uzanan x i-1 ile x i eksenleri arasındaki dik uzaklığa d i eklem kaçıklığı denir.

79 Denativ-Hartenberg Yöntemi Şekil incelenirse, z i-1 ekseni ile z i ekseni arasındaki x i boyunca ölçülen açıya α i-1 eksen açısı denir.
80 Denativ-Hartenberg Yöntemi Yandaki şekil incelenirse, x i-1 ekseni ile x i ekseni arasındaki z i boyunca ölçülen açıya θ i eklem açısı denir.

81 Denativ-Hartenberg Yöntemi Koordinat sistemleri eklemlere yerleştirildikten sonra D-H değişkenleri bulunur ve bir sonraki slaytta yer alan tabloya ilgili veriler yazılır. Robotun hareket etmesiyle değişmeyen parametreler a i-1 eklem uzunlukları ve α i-1 eksen açılarıdır. Değişen parametreler, eklem döner ise θ i-1 eklem açısı, eklem prizmatik ise d i-1 eklem kaçıklığıdır.
82 Denativ-Hartenberg Yöntemi - Tablo Eksen No D-H Değişkenleri Eklem 2 Komşu Eksen Açısı Eklem Uzunluğu Eklem Kaçıklığı Eklem Açısı Değişkeni i α i-1 a i-1 d i θ i d i veya θ i 1 α 0 a 0 d 1 θ 1 d 1 veya θ 1 2 α 1 a 1 d 2 θ 2 d 2 veya θ 2 3 α 2 a 2 d 3 θ 3 d 3 veya θ 3 4 α 3 a 3 d 4 θ 4 d 4 veya θ 4
83 Denativ-Hartenberg Yöntemi Her ekleme ait dönüşüm matrisi şu şekilde bulunacaktır;
84 Denativ-Hartenberg Yöntemi Dönüşüm matrislerin çarpılması ile uç işlevcisinin konumunu ve yönelimini içeren ve eklem değişkenlerinin birer fonksiyonu olan genel bir dönüşüm matrisi elde edilir. Bu matriste 9 adet dönme ( r 11, r 12, r 13, r 21, r 22, r 23, r 31, r 32 ve r 33 ) ve 3 adet de konum (p x, p y ve p z ) belirten toplam 12 elemanı bulunur. Daha önce de sözü edildiği üzere; r 41, r 42, r 43 ve r 44 elemanları (Bir önceki slaytta yer alan formülde * olarak gözükmekte.. ) Global Ölçek olarak adlandırılır. *Soru : Global Ölçek matrisi * haricinde kullanılabilir mi, anlamı nedir?*
85 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi İleri Yön (Düz) Manipülatör Kinematiği Geometrik Yaklaşım konusunda kullandığımız robot sistemine, Denativ-Hartenberg Yöntemini uygulayalım.
86 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Öncelikle kolun başlangıç değerlerine göre eklemlere koordinat sistemleri yerleştirilir.
87 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi İkinci adım olarak, dönme eklemlerine Z eksenleri yerleştirilir.
88 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Üçüncü adımda Z eksenine dik ve eklem boyunca uzanan X eksenleri yerleştirilir.
89 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Dördüncü adımda sağ el kuralına göre Y eksenleri yerleştirilir.
90 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Son adım olarak da koordinat sistemleri eklemlere yerleştirildikten sonra D-H değişkenleri belirlenir ve veriler ilgili tabloya işlenir.
91 HATIRLATMA : Denativ-Hartenberg Yöntemi - Tablo Eksen No D-H Değişkenleri Eklem 2 Komşu Eksen Açısı Eklem Uzunluğu Eklem Kaçıklığı Eklem Açısı Değişkeni i α i-1 a i-1 d i θ i d i veya θ i 1 α 0 a 0 d 1 θ 1 d 1 veya θ 1 2 α 1 a 1 d 2 θ 2 d 2 veya θ 2 3 α 2 a 2 d 3 θ 3 d 3 veya θ 3 4 α 3 a 3 d 4 θ 4 d 4 veya θ 4 şeklindeydi...
92 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Öncelikle D-H değişkenlerinden sabit olan parametreler belirlenir. Örnekteki robot incelendiğinde, Z 0,1, Z 2, Z 3 ve Z 4 eksenlerinin dönme yönleri aynı olduğundan α 0, α 1, α 2 ve α 3 açıları 0 (sıfır) dır. Z 0 ile Z 1 arasında X 1 boyunca uzanan herhangi bir bağ uzunluğu olmadığından a 0 = 0 olacaktır.
93 Eksen No D-H Değişkenleri Eklem 2 Komşu Eksen Açısı Eklem Uzunluğu Eklem Kaçıklığı Eklem Açısı Değişkeni i α i-1 a i-1 d i θ i d i veya θ i θ 1 θ L 1 (Z 1 Z 2 arası) 0 θ 2 θ L 2 (Z 2 Z 3 arası) 4 0 L 3 (Z 3 Z 4 arası) 0 θ 3 θ
94 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Tablomuzu elde ettik. Dönüşüm matrislerini teker teker bulmamız gerekiyor. Ardından elde edilen dönüşüm matrisleri ile sistemin hareketini açıklamış olacağız. Genel formülünü kullanarak, eşitliğini ifade edeceğiz.
95 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Birinci eklem dönüşüm matrisi şu şekilde bulunacaktır;
96 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi İkinci eklem dönüşüm matrisi şu şekilde bulunacaktır;
97 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Üçüncü eklem dönüşüm matrisi şu şekilde bulunacaktır;
98 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Dördüncü eklem dönüşüm matrisi şu şekilde bulunacaktır;
99 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi Elde edilen dört matrisi çarpıp, işlemimizi bitireceğiz.


100 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi İşlemin devamı sinüs kosinüs dönüşümlerinin de yardımı ile şu şekilde getirilebilir;

101 İleri Yön (Düz) Manipülatör Kinematiği Cebirsel Yaklaşım : Denativ-Hartenberg Yöntemi HATIRLATMA ; İşlem sonucunda ilgili elemanların P x ve P y olduğuna nereden varıldı??

102 Ters Manipülatör Kinematiği
103 Ters kinematik problemi nedir? Verilen sonlandırıcı konumu ve yönelimi için eklem değişkenlerinin değerlerini bulmak. Ters kinematik problemlerinde düz kinematiklerin tersi biçimde homojen dönüşüm matrisleriyle oluşturulan doğrusal olmayan denklemlerin çözümlenmesi istenir.
104 Ters Kinematik Robotun uç işlevcisinin ana çerçeveye göre konumu ve yönelimi verildiğinde, manipülatörün bu konuma ve yönelime gelebilmesi için gerekli eklem değişkenlerinin bulunması işlemi. Başka bir deyişle ters kinematik, uç işlevcisinin konum ve yönelimini kartezyen koordinat sisteminden eklem koordinat sistemine dönüştürme işlemi olarak da tanımlanabilir.
105 Ters Kinematik

106 Ters Kinematik İleri yön kinematiğinde, Ters Kinematikte, mantığı mevcuttur.
107 Ters Kinematik - Zorluklar Ters Kinematik, aşağıdaki sebeplerden dolayı oldukça zor olan problemleri bünyesinde barındırmaktadır; A) Analitik olarak karmaşık, doğrusal olmayan denklemler içerir. B) Eklemlerin yapısına bağlıdır. Eğer robot prizmatik eklemlerden oluşuyorsa ters kinematik probleminin çözümü kolaylaşıyorken, robottaki döner eklem sayısı arttıkça problemin zorluğu da doğru orantılı bir şekilde artmaktadır. C) Her zaman matematiksel çözüm fiziksel çözümü temsil edemez.
108 Ters Kinematik - Zorluklar D) Aynı uç işlevcisi için birden fazla çözüm olabilir. Ters kinematik çözüm sayısı, robotun serbestlik derecesinin yanında aynı zamanda eklem değişkenlerine de bağlıdır. Her bir eklemde eklem uzunluğu ve eklem kaçıklığının olması çözüm sayısını arttıracaktır. Örneğin, 6 eksenli bir robotta, her bir eklem için en az bir eklem uzunluğu ve eklem kaçıklığı olduğundan ters kinematik çözüm sayısı tahmin edilebileceği üzere 2 6 =64 tür. Yalnız, C maddesinde de belirtildiği üzere, bu çözümlerden bazıları sanal çözümlerdir.

109 Ters Kinematik Örnek: PUMA robot kolunun, aynı hedef noktaya 4 farklı şekilde erişmesi;
110 Ters Kinematik Arctan2 Fonksiyonu Arctan2 fonksiyonu, çift parametreli bir arctanjant fonksiyonudur. Yazılımda (C dilinde math.h standart kütüphanesinde tanımlı bir fonksiyondur.) / robotikte özellikle ters kinematik incelemelerinde kullanılır. Arctan2 fonksiyonunun, klasik Arctanjant fonksiyonuna göre avantajını iki durum ile açıklayalım, Durum 1 : Standart arctanjant fonksiyonuna göre (1,1) ve (-1,-1) noktalarının karşılığı π/4 olmaktadır. Fakat tanımı gereği arctan2 fonksiyonu söz konusu koordinatlarda sırasıyla π/4 ve - 3π/4 değerlerini verir. Durum 2 : x ekseni ile (1,0) vektörü arasındaki açıyı elde etmek isteyelim. Söz konusu açıyı klasik arctanjant fonksiyonu ile elde etmek istersek sonuca ulaşamayız. Fakat Arctan2 fonksiyonu, söz konusu vektör için doğru sonuç olan π/2 değerini elde etmemize olanak sağlar.
111 Ters Kinematik Arctan2 Fonksiyonu Arctan2(0,0), geleneksel olarak tanımsız olarak ifade edilmiştir.

112 Arctan2 Fonksiyonu Birim Çemberde Tanım Aralığı
113 Ters Kinematik Denklemlerin çözümü için iki adet yaklaşım mevcuttur. A) Kapalı Form Yaklaşımı (Cebirsel / Geometrik) B) Sayısal Yaklaşım (İteratif)
114 Ters Kinematik Aşağıda verilen düzlemsel kol üzerinde kapalı form yaklaşımını inceleyelim.
115 Ters Kinematik Kapalı Form Yaklaşımı Ф = θ 1 + θ 2 + θ 3 pw x = p x - a 3 cos(ф) = a 1 cos( θ 1 ) + a 2 cos( θ 1 + θ 2 ) pw y = p y - a 3 sin(ф) = a 1 sin( θ 1 ) + a 2 sin( θ 1 + θ 2 ) pw x 2 + pw y 2 = a 1 2 a a 1 a 2 cos( θ 2 ) cos( θ 2 ) = (pw x 2 + pw y 2 - a a 2 2 ) / (2 a 1 a 2 ) sin(θ 2 ) = ± 1 cosθ 2 2 olarak hesaplanır.
116 Ters Kinematik Kapalı Form Yaklaşımı sin(θ 2 ) = ± 1 cosθ 2 2 Burada ± kavramı dirsek yukarı / aşağı duruşlara karşılık gelmektedir.
117 Ters Kinematik - Kapalı Form Yaklaşımı θ 2 açısı, elde edilen ifadeler ile şu şekilde ifade edilmelidir, θ 2 = Arctan2(sin(θ 2 ), cos(θ 2 )) W noktası için elde ettiğimiz ifadelerde sin(θ 2 ), cos(θ 2 ) ifadelerini uygun yerlere yazıp denklemleri düzenlersek, sin( θ 1 ) = [(a 1 +a 2 cos( θ 2 ) ) pw y - a 2 sin( θ 2 ) pw x ]/(pw x 2 + pw y 2 ) cos( θ 1 ) = [(a 1 +a 2 cos( θ 2 ) ) pw x + a 2 sin( θ 2 ) pw y ]/(pw x 2 + pw y 2 ) θ 1 = Arctan2(sin(θ 1 ), cos(θ 1 )) olarak ifade edilir. denklemleri elde edilir.
118 Ters Kinematik İteratif Yöntem Aşağıdaki sistemi ele alalım;

119 Ters Kinematik - İteratif Yöntem İleri yön kinematiğine ait dönüşüm matrisinin her iki tarafını çarpalım, ile
120 Ters Kinematik - İteratif Yöntem Daha önceki derslerimizde belirttiğimiz üzere, olacaktır. P 1 konum vektörünün sıfır olduğu da ortadadır.
121 Ters Kinematik - İteratif Yöntem İşleme devam edersek, elde edilir.
122 Ters Kinematik - İteratif Yöntem Elde ettiğimiz matrisi, ile çarpalım. ileri yön kinematiği homojen dönüşüm matrisi
123 Ters Kinematik - İteratif Yöntem ifadesini elde edelim,
124 Ters Kinematik - İteratif Yöntem Elde ettiğimiz denk iki ifadeyi birbirine eşitleyip ters kinematik denklemlerini elde edelim
125 Ters Kinematik - İteratif Yöntem Şu denklemler elde edilecektir,
126 Ters Kinematik - İteratif Yöntem Ters kinematik çözümünün tamamı mümkünse kol uzunlukları cinsinden ifade edilmelidir. Dolayısı ile elde ettiğimiz denklemlere tekrar dönelim
127 Ters Kinematik - İteratif Yöntem 10. ve 11. denklemlerin her iki tarafının karesini alıp alt alta toplayalım,
128 Ters Kinematik - İteratif Yöntem Eşitliğin son tarafını, sağ tarafını da parantezlerine alıp ifadeyi tekrar düzenleyelim, Hatırlatma:
129 Ters Kinematik - İteratif Yöntem İşleme devam edelim, Dolayısı ile, Hatırlatma: elde edilir.

130 ÖDEV : θ 1 için nasıl bir yaklaşım yapılabilir???
131 Diferansiyel Hareket ve Hız Kavramları B noktası için; İfadelerin diferansiyeli, şeklinde olacaktır.
132 Diferansiyel Hareket ve Hız Kavramları Elde ettiğimiz denklem setini matris formunda yazacak olursak; elde edilir. Genel hatları ile; *A+ = *B+.*C+ formatı A= B noktasındaki robot kolunun / manipülatörün diferansiyel hareketi B= Jacobian C= Eklemlerin/Eklem değişkenlerinin diferansiyel hareketi
133 Diferansiyel Hareket ve Hız Kavramları İşleme devam edersek, elde edilir.
134 Jacobian Tanım olarak; Bir robot mekanizmasının elemanlarının geometrisinin zamanda gösterilmesi denebilir Tek tek eklem hareketleri ile genel mekanizma hareketleri arasındaki ilişki.
135 Jacobian x j = değişkenler, Y i = f fonksiyonlar kümesi olmak üzere, x j diferansiyel değişimi oluşturulduğunda Y i deki diferansiyel değişim şu şekilde tanımlanacaktır;
136 Jacobian Elde ettiğimiz denklem setlerini matris formunda yazacak olursak; Yani;
137 Jacobian Robotik sistem için düşünecek olursak; Diğer bir gösterimle;
138 Jacobian Burada; : Elin eksen boyunca diferansiyel hareketi. : Elin eksene göre diferansiyel dönüşleri/rotasyonları.
139 Bir çerçevede/düzlemde diferansiyel hareket A) Diferansiyel Öteleme ( ) B) Diferansiyel Dönme/Rotasyon ( ) C) Diferansiyel Dönüşüm (Dönmeler ve ötelemeler )
140 Bir çerçevede/düzlemde diferansiyel hareket Diferansiyel Öteleme ( ), Diferansiyel Dönme/Rotasyon ( ) olmak üzere ve, kabulleri ile öteleme & dönme/rotasyon matrislerimizi tanımlayalım/bulalım.
141 Bir çerçevede/düzlemde diferansiyel hareket Elde edilir.
142 Bir çerçevede/düzlemde diferansiyel hareket SORU: Aşağıdaki eşitlik doğru mudur?
143 Bir çerçevede/düzlemde diferansiyel hareket Dolayısı ile;
144 Bir çerçevede/düzlemde diferansiyel hareket Genel bir k ekseni için diferansiyel hareket; şeklinde tanımlanır. İşleme devam edersek;
145 Bir çerçevede/düzlemde diferansiyel hareket Yüksek dereceli diferansiyel terimlerini ihmal edip işleme devam edersek; elde edilir.
146 Bir çerçevede/düzlemde diferansiyel hareket Hatırlayacak olursak, idi. Not:versine fonksiyonu = 1 cos
147 Bir çerçevede/düzlemde diferansiyel hareket için, elde edilir
148 Bir çerçevede/düzlemde diferansiyel hareket T = orijinal düzlem, dt= T deki diferansiyel değişim olmak üzere, Diferansiyel Operatörü olmak üzere; şeklinde tanımlanmıştır. ifadesidir.
149 Bir çerçevede/düzlemde diferansiyel hareket *NOT* Diferansiyel operatörü, bir homojen dönüşüm matrisi ya da düzlem değildir! olarak elde edilir.
150 Diferansiyel Değişimin Yorumlanması [dt+ = Bir düzlemin mevcut diferansiyel harekete göre değişimini ifade etsin, Düzlem *dt+ kadar dönmüş, ötelenmiş {dn, do, da} = yöndeki/yönelimdeki değişim. (Change in orientation ) {dp} ifadeleri = pozisyondaki değişim.
151 Eksenler arası diferansiyel dönüşüm : Diferansiyel Operatör : Sabit referans eksene göre diferansiyel operatör (dif. operator w.r.t fixed ref. frame) : Belirlenen andaki eksene göre diferansiyel operatör (dif. operator w.r.t the current frame) Eşitliğinde her iki tarafı da T 1 ile çarparsak, olmak üzere, İfadesini düzenlersek, ifadesi elde edilir.
152 Eksenler arası diferansiyel dönüşüm Bir önceki slaytta elde ettiğimiz denklemi matematiksel olarak detaylı ifade edecek olursak, T= ise, olacaktır.
153 Eksenler arası diferansiyel dönüşüm Diferansiyel Operatörü, öyleyse, işlemi, şeklinde olacaktır.

154 Eksenler arası diferansiyel dönüşüm Burada işlemler yapıldığında, ifadeleri elde edilecektir ( Söz konusu konu ve diğer konular ile ilgili uygulamada sayısal örnek çözülecektir. )
155 Bir Robot Kolu Ekseni ve Robotun Diferansiyel Hareketi => n, o, a, p bileşenlerindeki değişim Jacobian, robot kolunun mikro düzeyde hareketleri robotun genel(tüm) mikro düzeyde hareketleri arasında ilişkiyi verir/ yansıtır. veya
156 Jacobian ın hesaplanması Yandaki robotik sistemin D-H tablosu aşağıdaki gibidir;
157 Jacobian ın hesaplanması Sistemin genel homojen dönüşüm matrisi şu şekilde olacaktır;
158 Jacobian ın hesaplanması 1 3 satır hesaplanması; Homojen dönüşüm matrisinde son sütun ifadesidir,, ve ifadelerine bakalım.


159 Jacobian ın hesaplanması satır Daha önce bahsi geçen zincir kuralını uygulayacağız.
160 Jacobian ın hesaplanması 1 3 satır Jacobian ın ilk satır elemanları şu şekilde bulunacaktır;
161 Jacobian ın hesaplanması 1 3 satır Benzer şekilde,
162 Jacobian ın hesaplanması 1 3 satır İşlem devam ettirilirse, Jacobian ın 2. satır elemanları şu şekilde elde edilecektir;
163 Jacobian ın hesaplanması 1 3 satır
164 Jacobian ın hesaplanması 1 3 satır İşlem devam ettirilirse, Jacobian ın 3. satır elemanları şu şekilde elde edilecektir;
165 Jacobian ın hesaplanması 4 6 satır : T deki rotasyonları ifade eder Fakat burada bir sorun var, tek bir denklem / denklem seti 3 boyuttaki tüm diferansiyel rotasyonları ifade edemez. Devamı haftaya. (T6 (son düzlem/çerçeve) ya göre Jacobian hesabı )
Robotik Sistemlerine Giriş. Yard. Doç. Dr. Hasan TİRYAKİ
 Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
MKT 2134 ENDÜSTRİYEL ROBOTLAR
 MKT 2134 ENDÜSTRİYEL ROBOTLAR Robotun Tanımı : Amerika Robot Enstitüsü (1979) robotu, malzemeleri, araçları, parçaları hareket ettirmek için dizayn edilmiş programlanabilen çok fonksiyonlu manipülatörler
MKT 2134 ENDÜSTRİYEL ROBOTLAR Robotun Tanımı : Amerika Robot Enstitüsü (1979) robotu, malzemeleri, araçları, parçaları hareket ettirmek için dizayn edilmiş programlanabilen çok fonksiyonlu manipülatörler
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
18.701 Cebir 1. MIT Açık Ders Malzemeleri http://ocw.mit.edu
 MIT Açık Ders Malzemeleri http://ocw.mit.edu 18.701 Cebir 1 2007 Güz Bu malzemeden alıntı yapmak veya Kullanım Şartları hakkında bilgi almak için http://ocw.mit.edu/terms ve http://tuba.acikders.org.tr
MIT Açık Ders Malzemeleri http://ocw.mit.edu 18.701 Cebir 1 2007 Güz Bu malzemeden alıntı yapmak veya Kullanım Şartları hakkında bilgi almak için http://ocw.mit.edu/terms ve http://tuba.acikders.org.tr
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
Robot Bilimi. Robotların Sınıflandırılması
 Robot Bilimi Robotların Sınıflandırılması Öğr. Gör. M. Ozan AKI r1.0 Robot Teknolojisinin Temelleri Robot bilimi, birçok mühendislik dalını kapsar. Teknoloji Düzeyi Hareket Güç Açık Çevrim Denetim Dış
Robot Bilimi Robotların Sınıflandırılması Öğr. Gör. M. Ozan AKI r1.0 Robot Teknolojisinin Temelleri Robot bilimi, birçok mühendislik dalını kapsar. Teknoloji Düzeyi Hareket Güç Açık Çevrim Denetim Dış
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
ROBOTİK VE ENDÜSTRİYEL ROBOTLAR
 HALİÇ ÜNİVERSİTESİ İŞLETME FAKÜLTESİ İŞLETME ENFORMATİĞİ BÖLÜMÜ ROBOTİK VE ENDÜSTRİYEL ROBOTLAR Yrd. Doç. Dr. Turan ŞİŞMAN 2017 - İSTANBUL AJANDA Robotik Etimoloji Kilometre Taşları Tanımlar ve Yasalar
HALİÇ ÜNİVERSİTESİ İŞLETME FAKÜLTESİ İŞLETME ENFORMATİĞİ BÖLÜMÜ ROBOTİK VE ENDÜSTRİYEL ROBOTLAR Yrd. Doç. Dr. Turan ŞİŞMAN 2017 - İSTANBUL AJANDA Robotik Etimoloji Kilometre Taşları Tanımlar ve Yasalar
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Çoklu Kordinat Sistemi
 Çoklu Kordinat Sistemi Uçak pistte durduğu zaman burnunun kuleye göre kordinatı: (50, 5, 0), buna karşın uçağın kordinatlarına göre pozisyonu ise:(0,0,0). Benzer bir biçimde, kulenin tabanı kule kordinat
Çoklu Kordinat Sistemi Uçak pistte durduğu zaman burnunun kuleye göre kordinatı: (50, 5, 0), buna karşın uçağın kordinatlarına göre pozisyonu ise:(0,0,0). Benzer bir biçimde, kulenin tabanı kule kordinat
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
için en uygun robot kol olarak belirlenmiştir. Gerek hızı gerekse hassasiyeti, uygulamalar için yeterli verimi sağlamaktadır.
 . GİRİŞ Savunma ve Endüstriyel sanayide yaşanan gelişmeler, insan gücü maliyetlerinin düşürülmesi ve kalite arttırılmasının amaçlanması, insanları robot teknolojilerini kullanmaya zorunlu bırakmıştır.
. GİRİŞ Savunma ve Endüstriyel sanayide yaşanan gelişmeler, insan gücü maliyetlerinin düşürülmesi ve kalite arttırılmasının amaçlanması, insanları robot teknolojilerini kullanmaya zorunlu bırakmıştır.
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU -1-
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
TORK VE DENGE. İçindekiler TORK VE DENGE 01 TORK VE DENGE 02 TORK VE DENGE 03 TORK VE DENGE 04. Torkun Tanımı ve Yönü
 İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur.
 Üç Boyutlu Geometri Nokta (Point,Vertex) Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur. Kartezyen Koordinat Sistemi Uzayda bir noktayı tanımlamak
Üç Boyutlu Geometri Nokta (Point,Vertex) Nokta uzayda bir konumu belirtir. Noktanın 0 boyutlu olduğu kabul edilir. Herhangi bir büyüklüğü yoktur. Kartezyen Koordinat Sistemi Uzayda bir noktayı tanımlamak
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
1. Hafta Uygulama Soruları
 . Hafta Uygulama Soruları ) x ekseni, x = doğrusu, y = x ve y = x + eğrileri arasında kalan alan nedir? ) y = x 3 ve y = 4 x 3 parabolleri arasında kalan alan nedir? 3) y = x, x y = 4 eğrileri arasında
. Hafta Uygulama Soruları ) x ekseni, x = doğrusu, y = x ve y = x + eğrileri arasında kalan alan nedir? ) y = x 3 ve y = 4 x 3 parabolleri arasında kalan alan nedir? 3) y = x, x y = 4 eğrileri arasında
Viyana İmam Hatip Lisesi Öğrenci Seçme Sınavı - Matematik
 Viyana İmam Hatip Lisesi Öğrenci Seçme Sınavı - Matematik 1. Ünite: Geometriden Olasılığa 1. Bölüm: Yansıyan ve Dönen Şekiller, Fraktallar Yansıma, Öteleme, Dönme Fraktallar 2. Bölüm: Üslü Sayılar Tam
Viyana İmam Hatip Lisesi Öğrenci Seçme Sınavı - Matematik 1. Ünite: Geometriden Olasılığa 1. Bölüm: Yansıyan ve Dönen Şekiller, Fraktallar Yansıma, Öteleme, Dönme Fraktallar 2. Bölüm: Üslü Sayılar Tam
İÇİNDEKİLER. Ön Söz...2. Noktanın Analitik İncelenmesi...3. Doğrunun Analitiği Analitik Düzlemde Simetri...25
 İÇİNDEKİLER Ön Söz...2 Noktanın Analitik İncelenmesi...3 Doğrunun Analitiği...11 Analitik Düzlemde Simetri...25 Analitik Sistemde Eşitsizlikler...34 Çemberin Analitik İncelenmesi...40 Elips...58 Hiperbol...70
İÇİNDEKİLER Ön Söz...2 Noktanın Analitik İncelenmesi...3 Doğrunun Analitiği...11 Analitik Düzlemde Simetri...25 Analitik Sistemde Eşitsizlikler...34 Çemberin Analitik İncelenmesi...40 Elips...58 Hiperbol...70
Bilgisayar Grafikleri
 Bilgisayar Grafikleri Konular: Cismin Tanımlanması Bilindiği gibi iki boyutta noktalar x ve y olmak üzere iki boyutun koordinatları şeklinde ifade edilirler. Üç boyutta da üçüncü boyut olan z ekseni üçücü
Bilgisayar Grafikleri Konular: Cismin Tanımlanması Bilindiği gibi iki boyutta noktalar x ve y olmak üzere iki boyutun koordinatları şeklinde ifade edilirler. Üç boyutta da üçüncü boyut olan z ekseni üçücü
3-1 Koordinat Sistemleri Bir cismin konumunu tanımlamak için bir yönteme gereksinim duyarız. Bu konum tanımlaması koordinat kullanımı ile sağlanır.
 Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Ödev 1. Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N
 Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
1. HAFTA. Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler.
 1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
Aralıklar, Eşitsizlikler, Mutlak Değer
 ARALIKLAR Gerçel sayıların, aralık olarak adlandırılan bazı kümeleri kalkülüste sık sık kullanılır ve geometrik olarak doğru parçalarına karşılık gelir. Örneğin, a < b ise, a dan b ye açık aralık, a ile
ARALIKLAR Gerçel sayıların, aralık olarak adlandırılan bazı kümeleri kalkülüste sık sık kullanılır ve geometrik olarak doğru parçalarına karşılık gelir. Örneğin, a < b ise, a dan b ye açık aralık, a ile
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bu bölümde, bir noktaya etkiyen ve bir koordinat ekseni ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi ile ilişkili gerilme bileşenlerine dönüştürmek
Gerilme Dönüşümleri (Stress Transformation) Bu bölümde, bir noktaya etkiyen ve bir koordinat ekseni ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi ile ilişkili gerilme bileşenlerine dönüştürmek
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
 ANKARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ YÜKSEK LİSANS TEZİ ALTI EKSENLİ ROBOT KOLUN HAREKETSEL KARAKTERİSTLİĞİNİN GÖRSEL PROGRAMLANMASI VE GERÇEK ZAMANLI UYGULAMALAR Mehmet Serdar GÜZEL BİLGİSAYAR
ANKARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ YÜKSEK LİSANS TEZİ ALTI EKSENLİ ROBOT KOLUN HAREKETSEL KARAKTERİSTLİĞİNİN GÖRSEL PROGRAMLANMASI VE GERÇEK ZAMANLI UYGULAMALAR Mehmet Serdar GÜZEL BİLGİSAYAR
TORK VE DENGE 01 Torkun Tanımı ve Yönü
 TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Jeodezi
 1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
Matematikte karşılaştığınız güçlükler için endişe etmeyin. Emin olun benim karşılaştıklarım sizinkilerden daha büyüktür.
 - 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
- 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
sonlu altörtüsü varsa bu topolojik uzaya tıkız diyoruz.
 Ders 1: Önbilgiler Bu derste türev fonksiyonunun geometrik anlamını tartışıp, yalnız R n nin bir açık altkümesinde değil, daha genel uzaylarda tanımlı bir fonksiyonun türevi ve özel noktalarının nasıl
Ders 1: Önbilgiler Bu derste türev fonksiyonunun geometrik anlamını tartışıp, yalnız R n nin bir açık altkümesinde değil, daha genel uzaylarda tanımlı bir fonksiyonun türevi ve özel noktalarının nasıl
JFM 301 SİSMOLOJİ ELASTİSİTE TEORİSİ Elastisite teorisi yer içinde dalga yayılımını incelerken çok yararlı olmuştur.
 JFM 301 SİSMOLOJİ ELASTİSİTE TEORİSİ Elastisite teorisi yer içinde dalga yayılımını incelerken çok yararlı olmuştur. Prof. Dr. Gündüz Horasan Deprem dalgalarını incelerken, yeryuvarının esnek, homojen
JFM 301 SİSMOLOJİ ELASTİSİTE TEORİSİ Elastisite teorisi yer içinde dalga yayılımını incelerken çok yararlı olmuştur. Prof. Dr. Gündüz Horasan Deprem dalgalarını incelerken, yeryuvarının esnek, homojen
Math 103 Lineer Cebir Dersi Final Sınavı
 Haliç Üniversitesi, Uygulamalı Matematik Bölümü Math 3 Lineer Cebir Dersi Final Sınavı 3 Araliık 7 Hazırlayan: Yamaç Pehlivan Başlama saati: : Bitiş Saati: 3:4 Toplam Süre: Dakika Lütfen adınızı ve soyadınızı
Haliç Üniversitesi, Uygulamalı Matematik Bölümü Math 3 Lineer Cebir Dersi Final Sınavı 3 Araliık 7 Hazırlayan: Yamaç Pehlivan Başlama saati: : Bitiş Saati: 3:4 Toplam Süre: Dakika Lütfen adınızı ve soyadınızı
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (2. Hafta)
") AĞIRLIK MERKEZİ STATİK (2. Hafta) Ağırlık merkezi: Bir cismi oluşturan herbir parçaya etki eden yerçeki kuvvetlerinin bileşkesinin cismin üzerinden geçtiği noktaya Ağırlık Merkezi denir. Şekil. Ağırlık
AĞIRLIK MERKEZİ STATİK (2. Hafta) Ağırlık merkezi: Bir cismi oluşturan herbir parçaya etki eden yerçeki kuvvetlerinin bileşkesinin cismin üzerinden geçtiği noktaya Ağırlık Merkezi denir. Şekil. Ağırlık
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
Diferansiyel denklemler uygulama soruları
 . Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
. Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta)
") MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
Elastisite Teorisi Düzlem Problemleri için Sonuç 1
 Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
Doç. Dr. Bilge DORAN
 Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Math 103 Lineer Cebir Dersi Final Sınavı
 Haliç Üniversitesi, Uygulamalı Matematik Bölümü Math Lineer Cebir Dersi Final Sınavı 8 Ocak 8 Hazırlayan: Yamaç Pehlivan Başlama saati: 4: Bitiş Saati: 5:5 Toplam Süre: Dakika Lütfen adınızı ve soyadınızı
Haliç Üniversitesi, Uygulamalı Matematik Bölümü Math Lineer Cebir Dersi Final Sınavı 8 Ocak 8 Hazırlayan: Yamaç Pehlivan Başlama saati: 4: Bitiş Saati: 5:5 Toplam Süre: Dakika Lütfen adınızı ve soyadınızı
 5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
KUADRATİK FORM. Tanım: Kuadratik Form. Bir q(x 1,x 2,,x n ) fonksiyonu
 fonksiyonu") KUADRATİK FORMLAR KUADRATİK FORM Tanım: Kuadratik Form Bir q(x,x,,x n ) fonksiyonu q x : n şeklinde tanımlı ve x i x j bileşenlerinin doğrusal kombinasyonu olan bir fonksiyon ise bir kuadratik formdur.
KUADRATİK FORMLAR KUADRATİK FORM Tanım: Kuadratik Form Bir q(x,x,,x n ) fonksiyonu q x : n şeklinde tanımlı ve x i x j bileşenlerinin doğrusal kombinasyonu olan bir fonksiyon ise bir kuadratik formdur.
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
FİNAL SORULARI GÜZ DÖNEMİ A A A A A A A
 AKDENİZ ÜNİVERSİTESİ MATEMATİK BÖLÜMÜ BİTİRME ÖDEVİ FİNAL SORULARI 25-26 GÜZ DÖNEMİ ADI SOYADI :... NO :... SINAV TARİHİ VE SAATİ : A A A A A A A Bu sınav 4 sorudan oluşmaktadır ve sınav süresi 9 dakikadır.
AKDENİZ ÜNİVERSİTESİ MATEMATİK BÖLÜMÜ BİTİRME ÖDEVİ FİNAL SORULARI 25-26 GÜZ DÖNEMİ ADI SOYADI :... NO :... SINAV TARİHİ VE SAATİ : A A A A A A A Bu sınav 4 sorudan oluşmaktadır ve sınav süresi 9 dakikadır.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
( ) ( ) ÖABT Analitik Geometri KONU TESTİ Noktanın Analitik İncelemesi. Cevap D. Cevap C. noktası y ekseni üzerinde ise, a + 4 = 0 A 0, 5 = 1+
 ( ) ÖABT Analitik Geometri KONU TESTİ Noktanın Analitik İncelemesi. Cevap D. Cevap C. noktası y ekseni üzerinde ise, a + 4 = 0 A 0, 5 = 1+") ÖABT Analitik Geometri KONU TESTİ Noktanın Analitik İncelemesi. a+ = b 4. a = b 0+ a b a b = b a+ b = 0. A ( a + 4, a) noktası y ekseni üzerinde ise, ( + ) a + 4 = 0 A 0, 5 a = 4 B b, b 0 noktası x ekseni
ÖABT Analitik Geometri KONU TESTİ Noktanın Analitik İncelemesi. a+ = b 4. a = b 0+ a b a b = b a+ b = 0. A ( a + 4, a) noktası y ekseni üzerinde ise, ( + ) a + 4 = 0 A 0, 5 a = 4 B b, b 0 noktası x ekseni
Özet: Açısal momentumun türetimi. Açısal momentum değiştirme bağıntıları. Artırıcı ve Eksiltici İşlemciler Kuantum Fiziği Ders XXI
 Özet: Açısal momentumun türetimi Açısal momentum değiştirme bağıntıları Levi- Civita simgesi Genel olarak, L x, L y, L z, nin eşzamanlı özdurumları yoktur L 2 ve bir bileşeni (L z ) nin eşzamanlı özdurumlarıdır.
Özet: Açısal momentumun türetimi Açısal momentum değiştirme bağıntıları Levi- Civita simgesi Genel olarak, L x, L y, L z, nin eşzamanlı özdurumları yoktur L 2 ve bir bileşeni (L z ) nin eşzamanlı özdurumlarıdır.
HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ
 HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ Öğr. Gör. RECEP KÖKÇAN Tel: +90 312 267 30 20 http://yunus.hacettepe.edu.tr/~rkokcan/ E-mail_1: rkokcan@hacettepe.edu.tr
HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ Öğr. Gör. RECEP KÖKÇAN Tel: +90 312 267 30 20 http://yunus.hacettepe.edu.tr/~rkokcan/ E-mail_1: rkokcan@hacettepe.edu.tr
1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi
 1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi Öğretim Üyesi: Yrd. Doç. Dr. Nurdan Bilgin Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres
1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi Öğretim Üyesi: Yrd. Doç. Dr. Nurdan Bilgin Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
Gerilme Dönüşümü. Bölüm Hedefleri
 Gerilme Dönüşümü Bölüm Hedefleri Bu bölümde, belirli bir koordinat sisteminde tanımlı gerilme bileşenlerinin, farklı eğimlere sahip koordinat sistemlerine nasıl dönüştürüleceği üzerinde durulacaktır. Gerekli
Gerilme Dönüşümü Bölüm Hedefleri Bu bölümde, belirli bir koordinat sisteminde tanımlı gerilme bileşenlerinin, farklı eğimlere sahip koordinat sistemlerine nasıl dönüştürüleceği üzerinde durulacaktır. Gerekli
DERS BİLGİ FORMU. Zorunlu Ders X. Haftalık Ders Saati Okul Eğitimi Süresi
 DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ
 ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ 1 Önder DEMİR 2 Cengiz ŞAFAK 3 Volkan TUNALI 4 Elif Pınar HACIBEYOĞLU 1,2,3 Marmara Üniversitesi Teknik Eğitim Fakültesi, Elektronik Bilgisayar Eğitimi Bölümü, Göztepe
ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ 1 Önder DEMİR 2 Cengiz ŞAFAK 3 Volkan TUNALI 4 Elif Pınar HACIBEYOĞLU 1,2,3 Marmara Üniversitesi Teknik Eğitim Fakültesi, Elektronik Bilgisayar Eğitimi Bölümü, Göztepe
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) A-Polar Koordinatlarda (r,θ) Hareket Denkemleri
 EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) A-Polar Koordinatlarda (r,θ) Hareket Denkemleri") DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) Şekildeki gibi dönen bir çubuk üzerinde ilerleyen bilezik hem dönme hareketi hemde merkezden uzaklaşma hareketi yapar. Bu durumda
DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) Şekildeki gibi dönen bir çubuk üzerinde ilerleyen bilezik hem dönme hareketi hemde merkezden uzaklaşma hareketi yapar. Bu durumda
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
Lineer Cebir. Doç. Dr. Niyazi ŞAHİN TOBB. İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler
 Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x