İSTANBUL TEKNİK ÜNİVERSİTESİ FEN EDEBİYAT FAKÜLTESİ MATEMATİK MÜHENDİSLİĞİ PROGRAMI
|
|
|
- Kudret Yerlikaya
- 7 yıl önce
- İzleme sayısı:
Transkript
1 İSTANBUL TEKNİK ÜNİVERSİTESİ FEN EDEBİYAT FAKÜLTESİ MATEMATİK MÜHENDİSLİĞİ PROGRAMI PARÇACIK SÜRÜ OPTİMİZASYONU İLE MÜHENDİSLİK OPTİMİZASYON PROBLEMLERİ VE BAŞLANGIÇ DEĞER PROBLEMLERİNİN ÇÖZÜMÜ BİTİRME ÖDEVİ Damla UĞUR Uğurcan KUŞKU Danışman: Doç. Dr. Ali ERCENGİZ MAYIS 2013
2 ÖNSÖZ Bu çalışmayı hazırlamamızda bize yol gösteren, yardımını ve bilgisini hiçbir zaman esirgemeyen Sayın Hocamız Doç. Dr. Ali ERCENGİZ e, öğrenim hayatımız boyunca her türlü desteği aldığımız değerli arkadaşlarımıza, bize sevgi, güven ve her türlü desteği veren ailelerimize en içten teşekkürlerimizi sunarız. Mayıs, 2013 Damla UĞUR Uğurcan KUŞKU i
3 Anneme ii
4 İÇİNDEKİLER Önsöz... ii İthaf... iii İçindekiler... iv Özet... vi 1. Giriş Optimizasyon Nedir? Optimizasyon Problemlerinin Çeşitleri Optimizasyon Algoritmalarının Sınıflandırılması Evrimsel Hesaplama Evrimsel Hesaplamalarda Kullanılan Ek Bilgiler Genetik Algoritmalar Evrimsel Programlama Evrimsel Strateji Parçacık Sürü Optimizasyonu Kökenleri Kullanıldığı Yerler Tekniğin Uygulanışı Problem Formülasyonu Parçacıkların Hareket Stratejisi Pbest Gbest R Değişkeni C Sabiti Konum Hız Yöntemin Uygulanışı Atalet Sabiti K Sabiti Hız Kısıtı iii
5 Konum Kısıtı Penaltı (Ceza) Fonksiyonu Komşuluk Kavramı Uygulamalar Yay Gerilim Dizaynı Optimizasyon Problemi Hız Düşürücü Optimizasyon Problemi Lineer Denklem Sistemlerinin Köklerinin Bulunması Hımmelblau Non-Lineer Optimizasyon Problemi Başlangıç Değer Problemleri Örnek Örnek Örnek Örnek Örnek Ekler Yay Gerilim Dizaynı Optimizasyon Problemi Hız Düşürücü Optimizasyon Problemi Lineer Denklem Sistemlerinin Köklerinin Bulunması Hımmelblau Non-Lineer Optimizasyon Problemi Başlangıç Değer Problemleri Örnek Örnek Örnek Örnek Örnek Kaynaklar iv
6 ÖZET Parçacık sürü optimizasyonu ilk olarak 1995 yılında Dr. Eberhart ve Dr. Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir. Bu teknikte her bir parçacık problemi çözmede potansiyel bir adaydır. Bu çalışmada popülasyon temelli olan parçacık sürü optimizasyonunun kökenleri, nasıl kullanıldığı, nerelerde kullanıldığı, nasıl geliştirildiği, problemlere nasıl uygulandığı gibi konulara yer verilmiştir. Çalışmada; lineer ve nonlineer denklem sistemlerinin çözümü, mühendislik problemlerinin çözümü ve başlangıç değer problemlerinin çözümü işlenmiştir. v
7 1. GİRİŞ 1.1. OPTİMİZASYON NEDİR? Optimizasyon, bir problemin olası çözümler arasından en uygununu belirlemekle ilgilenen bir disiplindir. En uygun çözüm problem ve çözen kişiye bağlı olarak bir ya da bir kaç kritere bağlı olarak belirlenir. Örneğin yapısal bir mühendislik probleminde, çözüm temel mühendislikteki özelliklere bağlı olarak belirlenebileceği gibi dizayn eden kişinin estetik zevklerine de bağlı olabilir. Kısıtlamalar kullanıcıya ya da problemin kendisine bağlıdır. Eğer çözüm tüm kısıtlamaları karşılıyorsa uygun(optimal) çözümdür. Optimizasyon problemlerinin değişik yapıları ve matematiksel karakteristikleri, nonlineerlik, süreklilik, dış bükeylik gibi ortak özellikleri olan özel problemlerin çözümünde kullanılacak algoritmalar geliştirilmesini gerektirmiştir. Günümüzde, çok çeşitli problem türlerinin çözümü için geliştirilmiş algoritmalar mevcuttur. Bununla beraber, aynı problem tipinin değişik örneklerinde kullanılmak üzere farklı hesaplama yöntemleri de geliştirilmiştir. Bu nedenle de optimizasyon teorisi ve uygulamaları için daha özel fikir ve yöntemlere olan ihtiyaç sürmektedir OPTİMİZASYON PROBLEMLERİNİN ÇEŞİTLERİ Bir fonksiyon en genel şekliyle, olarak ifade edilir.( : Tanım kümesi, : Değer kümesi olmak üzere.) Literatürde çoğu optimizasyon problemi, tanım kümesi n- boyutlu Euclid uzayı, R n, ve değer kümesi reel sayıların bir kümesi olan fonksiyonların minimize edilmesini gerektirir. Optimizasyon problemleri genel olarak amaç fonksiyonunun formuna göre çeşitlenir. Bunlardan en önemlileri aşağıda belirtildiği gibidir: Lineer optimizasyon: Amaç fonksiyonu ve kısıtlar lineer olduğunda. Non-lineer optimizasyon: Optimizasyon probleminde en az bir tane non-lineer fonksiyon olduğu durumları inceler. Konveks optimizasyon: Amaç fonksiyonu ve uygun küme konveks olduğu durumları inceler. Kuadratik optimizasyon: Amaç fonksiyonu kuadratik, kısıtlar lineer olduğu durumları inceler. Stokastik optimizasyon: Kısıt ve parametrelerin rastgele değişkenlere bağlı olduğu durumları inceler. 1
8 1.3. OPTİMİZASYON ALGORİTMALARININ SINIFLANDIRILMASI Optimizasyon problemleri genel olarak deterministik ve stokastik olarak iki ana kategoride ele alınır. Deterministik yaklaşım, bilinen parametreleri göz önüne alarak klasik yöntemlerle çözüm yöntemidir ve tasarımda oluşabilecek değişkenler(varyasyonlar) dikkate alınmaz. Bir varyasyon durumunda yaklaşım yetersiz kalacaktır. Stokastik yaklaşım ise değişkenlerin(varyasyonların) dikkate alındığı yöntemdir. Optimizasyon problemlerinin sınıflandırılmasında Garantili, direkt ve direkt olmayan olmak üzere çeşitli özel sınıflandırmalar kullanılması rağmen, tüm bu sınıflandırmalara bakılmaksızın, genel ve en etkili global optimizasyon metodu olan Evrimsel Hesaplama odaklanacağımız konu olacaktır EVRİMSEL HESAPLAMA Evrimsel hesaplama optimizasyon problemlerinde kullanılan temel yöntemlerden biridir. Bu yöntemin algoritmaları, Darwin in türlerin kökeni teorisinde geçen biyolojik prensiplere dayanmaktadır. Bu algoritmalar potansiyel çözüm popülasyonunu elde ederken iterasyonla evrimleşmeye dayanır. Evrim, popülasyondaki özel operatörlerin (çaprazlama, seleksiyon ve mutasyon gibi) çıktısı olarak kendini gösterir. Darwin in teorisinin optimizasyon alanındaki ilk uygulamaları 60 ların başında yapılmış olmasına rağmen evrimsel hesaplama olarak adlandırdığımız yöntem 90 larda kendini göstermiştir. Evrimsel hesaplamanın yaklaşımları olan genetik algoritmalar, evrimsel programlama, evrimsel strateji ve parçacık sürü optimizasyonu olarak bölümlere ayrılabilmektedir. Yöntemleri daha iyi anlayabilmek adına, çoğu yöntemde operatör olan seleksiyon, çaprazlama ve mutasyon kavramlarının açıklaması aşağıda yer almaktadır EVRİMSEL HESAPLAMALARDA KULLANILAN EK BİLGİLER Seleksiyon: Seleksiyon, bir popülasyondan, birbirleriyle çaprazlama yapacak bireylerin seçilme prosedürüdür. Birey seçimi deterministik ya da stokastik olabilmekle beraber her zaman için fonksiyon değerine bağlıdır. Deterministik yaklaşım, en küçük fonksiyon değerlerinde olan en iyi bireyleri seçerken, stokastik yaklaşım en yüksek ihtimalli en iyi bireyi atamaktadır. Literatürde birçok seçilim şeması olmasına rağmen en genellerinden olan Tournament Selection ın pseudocode u aşağıdaki gibidir: 2
9 Do ( ) Choose randomly m individuals from the population P. Select one among the m individuals. Add the selected individual into the parents pool. End Do Çaprazlama: Çaprazlama, yeni bir döl üretme amacında olan iki bireyin genlerinde taşıdıkları bilgilerin yeniden yapılanması sürecidir. Yeni bireyin DNA sı, bireyi oluşturanların DNA larındaki genetik bilginin kombinasyonu şeklinde olacaktır. Buradaki amaç çeşitliliği arttırmaktır. Mutasyon: Mutasyon temel bir biyolojik operasyon olup, organizmalara değişen çevre şartlarına daha uyumlu olmalarına olanak sağlamak için, genotiplerini değiştirerek bazı biyolojik özelliklerini değiştirme fırsatı sunar. Bu durum babadan oğula kalıtsal olarak geçebileceği gibi organizmanın kendisi tarafından sonradan da kazanılabilir. Biyolojik olarak gerçekleşen bu durumun genetik algoritmalar için modellenmesi, popülasyondaki çeşitliliği desteklemekte, bireylerin birbirlerine benzemelerini engellemekte ve lokal minimumu durgunlaştırıp kısıtlayacak davranışlara engel olmaktadır. Mutasyon aşağıdaki pseudocode da belirtildiği gibi tanımlanmaktadır: Do { } Do ( ) Generate a uniformly distributed random number, If Then Mutate the component End If End Do End Do Yukarıdaki operatörlerin yardımını alan Evrimsel Hesaplama Yöntemleri aşağıda açıklanmaktadır. 3
10 GENETİK ALGORİTMALAR Genetik algoritmalar, J.H. Holland tarafından 60 ların ortalarında geliştirilmiştir. Holland ın o zamanlardaki araştırması, değişen çevre şartlarına adapte olup cevap verebilen sistemler olmuştu. Sürekli rekabet ve döllenme, uzun vadede, doğal sistemlerdeki adaptasyonun temelleri olarak görülüyordu. Bunların yapay adaptasyon sistemleri için modellenmesi fikri gayet cazibeli görünüyordu. Holland ın bu fikri öğrencilerinin tezlerinde de genetik algoritmalar adında yeni bir optimizasyon tekniği olarak kendini göstermiştir. Bu teknik seleksiyon çaprazlama ve mutasyona dayanmakta olup bugünlerde kullanılan önemli optimizasyon yöntemlerinden biridir EVRİMSEL PROGRAMLAMA Evrimsel programlama temel evrimsel hesaplama yöntemlerinden biri olup 60 ların ortalarında L.J. Fogel tarafından yapay zeka alanında kullanılmak üzere geliştirilmiştir. Yöntemdeki temel operatör ise mutasyondur EVRİMSEL STRATEJİ Evrimsel strateji 60 larda Rechenberg, Schwefel ve Bienert tarafından mühendislik optimizasyon problemlerinin çözümü için geliştirilmiş bir optimizasyon tekniğidir. Bu teknikte sadece seleksiyon ve mutasyon kullanılmış olup çaprazlama yer almamaktadır. 4
11 2. PARÇACIK SÜRÜ OPTİMİZASYONU 2.1. KÖKENLERİ Parçacık sürü optimizasyonunun temelleri Reynolds un 1987 yılında yapmış olduğu kuş sürülerine benzer parçacıkların modellenmesine yönelik çalışmasına dayanır. Bu teknikte gruptaki her bir üyenin davranışı, ortaya çıkan karmaşık yapıya rağmen, genlerinde saklı olan basit bilgiye dayanır. Örneğin bir kuş sürüsünün uçuşu her bir kuşun hedefe ve anlık komşularına olan mesafesini koruma eğilimine göre basit bir şekilde, kabaca modellenebilir. Bu mesafe sürülerin boyutuna ve istenen davranışın ne olduğuna göre değişir. Örneğin; bir balık sürüsü tehlike altında değilken balıklar birbirlerine daha uzak mesafede hareket ederken, sürü yırtıcı bir hayvan tehdidiyle karşılaştığında daha küçük parçalara ayrılıp formunu değiştirerek kendini korumaya alır. Bu modellemelerin optimizasyon problemlerinin çözümündeki potansiyellerini gördükten sonra Eberhart ve Kenneddy konu üzerine yoğunlaşmaya başlamışlardır. Çalışmalarının sonucunda ise 1995 yılında popülasyon temelli sezgisel bir optimizasyon tekniği olan PSO yu geliştirmişlerdir KULLANILDIĞI YERLER Bu optimizasyon tekniği Eberhart ve Kennedy nin ardınan bir çok optimizasyon probleminin çözümünde de kullanılmıştır. Lineer ve lineer olmayan problemlerin çözümü, atış problemleri, çok bilinmeyenli denklemlerin köklerini bulma ve endüstriyel problemlerin çözümü bunlardan bazılarıdır. Performans açısından bakıldığında diğer optimizasyon tekniklerine göre daha avantajlıdır TEKNİĞİN UYGULANIŞI PROBLEM FORMÜLASYONU Tüm optimizasyon problemlerinin temel amacı amaç fonksiyonu olan i maksimum ya da minimum yapmaktır. x vektörü n boyutlu karar vektörü yada reel sayılardan oluşan bir karar değeridir. [2] 5
12 Parçacık sürü optimizasyonu sürü halinde hareket etme özelliği gösteren kuşların davranışlarından esinlenilerek geliştirilmiş ve çok geniş alanlardaki problemlerin çözümü için kullanılmaktadır. Temelde, popülasyondaki parçacıkların başlangıçta rastgele dağılmasına ve devam eden süreçteki içgüdüsel hareketlerine dayanmaktadır. Bu davranış belirli bir alanda bir amaca ulaşana kadar devam etmektedir. Sürü içerisindeki kuşların içgüdüsel hareketlerine matematiksel bir pencereden baktığımızda durumu şu şekilde ifade edebiliriz. Araştırma yapılacak uzay olsun ve fonksiyonu tanımlansın. Tanıma olabildiğince sadık kalabilmek adına A tanım kümesinin her problem için uygun uzaydan alındığı varsayılmaktadır. Daha öncede bahsedildiği gibi PSO popülasyon tabanlı bir optimizasyon metodudur. Bahsi geçen popülasyondan sürü(s) diye bahsedilmekte ve bu sürünün içerisindeki her bir bireye parçacık( ) denmektedir. N sürü içerisindeki toplam parçacık sayısını göstermekte, sürü ve parçacıklar ise şu şekilde tanımlanmaktadır: (2.1) Farklı sürüler içerisindeki parçacıklar değişiklik gösterebilmekte ve parçacıklar birden fazla parametreye bağlı olabilmektedirler. Parçacığın bağlı olduğu parametre sayısı ise boyut olarak adlandırılıp ve şu şekilde tanımlanmaktadır:, (2.2) Parçacıkların her bir iterasyonda gözlem yapılan uzayda(a) hareket ettikleri varsayılmaktadır. Bu durum ise hız ve pozisyon vektörlerinin ortam şartlarına uyum sağlamasıyla gerçekleşmektedir., (2.3) Hız vektörü, her adımda bir önceki adımdaki bilgilere göre güncellenmektedir. Parçacıklar her bir adımdaki en iyi pozisyonlarını akıllarında tutup, diğer hareketlerini bu en iyi pozisyonlara göre belirlemektedirler. Bu durumda, parçacıkların her bir iterasyon için bir en iyi pozisyon(pbest) değeri bulunmaktadır. (2.4), (2.5) Parçacıkların en iyi pozisyonları fonksiyonu kullanılarak belirlenmektedir. fonksiyonu, bir optimizasyon probleminde amaç fonksiyonunun minimum değeri almasını sağlayacak olan argümanları veren fonksiyondur. En basit ifadesiyle minimumu veren değişken değeridir. 6
13 (2.6) Sürü içerisindeki parçacıklar sezgisel olarak birbirlerini takip ettiklerinden, sürüdeki en iyi pozisyona sahip olan parçacık takip edilecektir. Bunun için pbestler arasından, fonksiyonu kullanılarak minimum değer seçilir ve bu değer global en iyi pozisyon (gbest) olarak adlandırılır. (2.7) Ebert & Kennedy 1995 yılındaki çalışmalarının ilk versiyonlarında aşağıdaki denklemlere ulaşmışlardır. ( ) ( ) (2.8) (2.9) PARÇACIKLARIN HAREKET STRATEJİLERİ Parçacıkların hareket stratejileri sürü içindeki konumlarına(x), parçacıkların boyutlarına(n), hızlarına(v), ataletlerine(w), ve hız - konum denklemlerinin optimum sonucu vermesini sağlayan bazı katsayılara (c, K) bağlıdır PBEST- GBEST İçgüdüsel olarak her bir parçacık 2 şekilde hareket etme eğilimi gösterir. Birincisi, sürünün tamamı için en iyi pozisyon (gbest) e yaklaşma, İkincisi, kendi en iyi poziyonu (pbest) i koruma eğilimidir. Sürü içindeki parçacıkların pbest(personel best) değerleri şu şekilde belirlenir; Başlangıçtaki pbest, rastgele atanmış başlangıç koşullarının değerlerine eşittir. Sonraki aşamalarda ise, bir önceki iterasyonda belirlenmiş olan pbest ile karşılaştırılarak yeni pbest değeri atanır. Eğer t. iterasyonadaki değer (t+1). iterasyondaki değerden büyük ise yeni pbest (t+1). iterasyondaki değerdir. Aksi taktirde, yeni pbest t. iterasyondaki değer olacaktır. { ( ) ( ) (2.10) 7
14 Sürünün gbest (global best) değeri ise şu şekilde belirlenir; Her bir iterasyon için pbest değerlerinden fonksiyonunu minimum yapan değer, gbest tir. Her iterasyonda bu işlem tekrarlanarak gbest güncellenir. (2.11) Sürü içerisindeki parçacıkların tüm boyutları için pbestler ve gbest ayrı ayrı hesaplanır R DEĞİŞKENİ Parçacıkların boyutları optimizasyon sonuçlarını etkilemektedir. PSO tekniği doğadan esinlenilerek geliştirilmiş bir yöntem olduğu için parçacıkların boyutları göz ardı edilememektedir. Yapılan araştırmalara göre bu boyut değerlerinin [0,1] aralığında olması problemlerin çözümünde en iyi sonucu vermektedir C SABİTİ Hız denkleminde yer alan C 1 - C 2 değerleri parçacıkların sürü içerisindeki konumlarını etkilemektedir. C değerlerinin değişmesi aşağıdaki şekillerde görüldüğü gibi parçacıkların yayıldıkları alanı değiştirmektedir. Şekil A da görüldüğü üzere C 1 =C 2 =1.0 alındığında parçacıklar daha dar alanda konumlanmışlardır. Şekil B deki gibi C 1 =C 2 =2 alındığında ise daha geniş alana yayılmışlardır. Yapılan araştırmalar C 1 =C 2 =2 değerinin en optimum sonucu verdiğini göstermektedir. 8
15 KONUM(X) Sürü içerisindeki parçacıkların konumu başlangıçta rastgele belirlenmektedir. Rastgele üretilen bu başlangıç değerleri belirli sınır koşullarına bağlıdır. Sınır koşullarına bağlanmış olması sapmayı azaltmaktadır. Parçacıkların konumu bir önceki iterasyondaki konumlarına ve o iterasyondaki hızlarına göre belirlenmektedir. { (2.12) HIZ (V) Sürü içerisindeki parçacıkların t anındaki hızları, bir sonraki iterasyondaki yeni konum ve yeni hızın belirlenmesinde etkilidir. (t+1). iterasyondaki V, t. iterasyondaki V ile (t+1). iterasyondaki X in toplanmasıyla bulunur.. (2.13) Şimdiye kadar anlatılan bilgiler kullanılarak basit bazı problemler çözülebilmektedir. Parçacık sürü optimizasyonunun ana denklemleri kullanılarak lineer bir denklem sisteminin kökleri bulunmuştur. Çözülen denklem sistemi ve nasıl çözüldüğü uygulamalar kısmında lineer denklem sistemlerinin köklerinin bulunması altında anlatılmıştır YÖNTEMİN UYGULANIŞI Her bir parçacık için, kısıtlara uygun bir şekilde başlangıç değerleri üretilir. Üretilen bu başlangıç değerleri ilk pbest leri oluşturacaktır. Parçacığın en iyi konumu (pbest) belirlendikten sonra daha önce anlatılan kurallara ve fonksiyonlara uygun bir şekilde bir gbest belirlenmelidir. Gbest hesabı komşuluk yönteminin kullanılıp kullanılmamasına göre değişiklik gösterir. Atanan başlangıç değerlerine ve hesaplanan gbest ve pbest değerlerine göre konum vektörleri belirlenir. 9
16 Parçacıkların hız vektörleri belirlenir. Normalde bir önceki iterasyona göre şekillenecek olan bu vektör, ilk iterasyonda sıfır alınacaktır. Kuşların başlangıçta durdukları varsayılmaktadır. Fonksiyon içerisinde kullanılmak üzere c ve R katsayıları belirlenmelidir. (Bu katsayıların nasıl belirleneceği yukarıda anlatılmıştır.) C 1 ve C 2 katsayıları her iterasyonda sabit kalırken R 1, R 2 katsayıları her iterasyonda ve iterasyon içerisindeki her bir işlemde rastgele belirlenmektedir. Tüm değişkenler belirlendikten sonra daha önceden belirtilmiş olan hız ve konum denklerimde yerlerine yazılarak parçacığın iterasyon sonundaki hız ve konum değerlerine ulaşılmaktadır. Bu işlemler belirli iterasyon sayısı sağlanana kadar ya da belirtilmiş olan bir kural gerçekleşene kadar devam ettirilirler. İşlemin tamamlanması durdurma kriterlerine bağlıdır. Durdurma kriterleri iterasyon sayısı veya en iyi sonuca yakınsama olarak belirlenebilir. Yöntem uygulanırken sürü içerisindeki parçacıkların sürüden ayrılma veya sapma gibi ihtimallerine karşı herhangi bir önlem alınmamaktadır. Çeşitli sebeplerden dolayı yoğun denklem sistemleri ve kısıtları olan problemlerde bu durum problemin çözümünü zorlaştırmaktadır. Sapma durumlarının önüne geçebilmek için çeşitli önlemler almak gerekmektedir. Alınan bu önlemler ileride anlatılacaktır. Girdiler: N parçacık sayısı; S sürü; P en iyi konum Adım 1: set t 0, Adım 2: Initialize S and Set P S. Adım 3: Adım 4: Evaluate S and P, and define index g of the best position. While (termination criterion not met) Adım 5: Update S using equations (1) and (2). Adım 6: Evaluate S. Adım 7: Update P and redefine index g. 10
17 Adım 8: Adım 9: Adım 10: Set t t+1. End While Print best position found Genel hatlarıyla parçacık sürü optimizasyon sisteminin nasıl çalıştığı yöntemin uygulanışı başlığı altında anlatılmıştır. Bu uygulama içerisinde yapılan işlemler parçacık sürü optimizasyonu yönteminin temelini oluşturmaktadır. Bu temel üzerine yeni eklemeler yapılarak optimizasyon problemlerinin ideale daha yakın sonuçlar vermesi sağlanabilmektedir. Bu eklemeler arasında başlıca atalet sabiti(w), K sabiti(k), hız kısıtı, konum kısıtı, penaltı(ceza) fonksiyonu ve komşuluk kavramı yer almaktadır. Bu kavramlar sırasıyla aşağıda anlatılmıştır ATALET SABİTİ (W) Bazı çok bilinmeyenli ya da çok fonksiyonlu karmaşık optimizasyon problemlerinin çözümünde hız fonksiyonuna eklenen w, çözümün en ideal şekilde çıkmasına yardım eder. (2.14) Atalet değişkeni hesaplanırken yukarıda belirtilmiş olan formül kullanılır. t değişkeni iterasyon sayısını göstermektedir. Denklemde görüldüğü üzere atalet değişkeni iterasyon satısı arttıkça artmaktadır K SABİTİ (K) Çok karmaşık optimizasyon problemlerinde W kullanımı dahi, doğru sonucu vermede yeterli olmadığından K sabitine ihtiyaç duyulmuştur. Bu sabit, sapma sayısını azaltarak doğru sonuca ulaşılmasına olanak sağlamıştır. Yeni denklem aşağıda belirtildiği gibidir. [ ( ) ( )], (2.15) (2.16) Kappa sabiti belirlenirken C 1 ve C 2, 2 den büyük sayılar alınmalıdır. (2.17) 11
18 (2.18) HIZ KISITI Parçacıkların hızlarının büyüklükleri kontrolsüz bir şekilde arttığı taktirde sürü içerisinden kopmalar olacaktır. Böyle bir durumun gerçekleşmesi, PSO nun zor problemlerde vereceği sonucu olumsuz bir şekilde etkilemektedir. Bu durumun önüne geçebilmek adına hız vektörüne sınırlamalar getirilmiştir. İlk olarak tüm iterasyonlarda geçerli olacak olan V max ve V min değerleri aşağıdaki gibi belirlenir. Denklem içerisindeki a ve b değişkenleri konum kısıtının başlangıç ve bitiş değerleridir. (2.19) Sonraki iterasyonlardaki hız değeri, belirlenmiş olan V max ve V min değerleri arasında olmalıdır. (2.20) { (2.21) KONUM KISITI Başlangıçta her bir parçacık için konum kısıtlarına uygun değerler atanmaktadır ve ilk iterasyon bu değerler ve bu değerlere bağlı diğer değişkenlerle gerçekleştirilmektedir. Genel olarak yapılan uygulamada daha sonraki değerlerin bu kısıtlar içerisinde olup olmadıklarına bakılmamaktadır bu da bazı parçacıkların sürüden sapmalarının önüne geçilmemesine sebep olmuştur. Parçacıkların sürü içerisinde kalıp optimizasyon problemini daha iyi bir çözüme kavuşturabilmek için her bir parçacığın yeni konumunun da belirli kısıtlar içinde olması gerekmektedir. Bu gerekliliği sağlayabilmek için konum kısıtı kullanılmış ve kısıt dışına çıkan parçacık yok sayılarak yerine yeni parçacık üretilmiştir. Bu durum sapmayı tamamen ortadan kaldırarak ideal çözüme ulaşmada önemli bir adım olmuştur. 12
19 PENALTI (CEZA) FONKSİYONU Son zamanlarda yapılan araştırmalarda kısıtları işlemek için penaltı fonksiyonu kullanılmıştır. Tek başına etkili olmayan bu ceza fonksiyonu yöntemi diğer kısıtlarla beraber kullanıldığında daha iyi sonuçlar elde edilmesine olanak sağlamıştır. Penaltı fonksiyonunun ana mantığı kısıtların dışında kalan parçacıkların amaç fonksiyonunu büyüterek, problemin ideal çözüme ulaşmasına yardımcı olmaktır. Algoritma içerisinde bu durum aşağıdaki gibi gerçekleşmektedir: Kısıtlar kontrol edilir, eğer parçacık kısıt dışında ise algoritma içerisinde belirlenmiş bir değişkene (toplam) bu değer atanır. Parçacığın her bir boyutu için bu işlem yinelenir. Bir sayaç değişkeni (sayac) yardımıyla bu işlemin kaç defa yapıldığı sayılır. Her parçacık için uygulanan bu fonksiyon (h) her iterasyonda yinelenir. Algoritma sonunda geri döndürülecek fonksiyon, penaltı fonksiyonu algoritması içerisinde oluşturulan ve kullanılan değişkenleri içermektedir. Döndürülecek fonksiyon aşağıdaki şekilde oluşturulur: Bir penaltı fonksiyonu oluşturulur. (2.22) Amaç fonksiyonu (f) ve penaltı fonksiyonu (h) toplanarak işleme girmek üzere geri döndürülür. (2.23) Penaltı fonksiyonu uygulandıktan sonra ortaya çıkan cevabı penaltı fonksiyonunun matematiksel yapısı çok fazla etkilemektedir. Eğer penaltı fonksiyonu azalarak artan bir fonksiyon ise sonuç ideale daha çok yaklaşacaktır. (2.24) 13
20 KOMŞULUK KAVRAMI Parçacık sürü optimizasyonu algoritmalarında kavuşma kabiliyeti iyi olan parçacıklarla birlikte atalet değişkeni de işleme alınmıştı. Ancak bu durum daha kompleks problemlerde istenilen sonucu verememektedir. Parçacıklardaki kayıp nedeniyle ilerleyen iterasyonlarda sürüde çöküş meydana gelmektedir. Bu çöküş incelemelerin devamını kısıtlamıştır ve parçacıkların sadece yerel pozisyonda iyi sonuç vermelerine sebep olmuştur. Parçacıkların hızlı kavuşması tek tepeli, dış bükey fonksiyonlu basit optimizasyon problemlerinde iyi sonuç vermesine rağmen; çok boyutlu, çok kısıtlı ve kompleks problemlerde büyük sorunlar yaşatmaktadır. Karşılaşılan bu problemin üstesinden gelebilmek adına sürü içerisindeki tüm parçacıkların konumuna göre belirlenmiş olan gbest, her bir iterasyonda farklı bir şemaya göre belirlenmelidir. Genel olarak, global bilgi şemasının yerine yerel bilgi şeması kullanılarak optimizasyon problemlerinin daha iyi sonuç vermeleri hedeflenmiştir. Her bir parçacığın komşulukları bulunurken kuşların halka topolojisine uygun bir biçimde şekillendikleri düşünülmektedir. Herhangi bir x parçacığının komşuluğu şu şekilde tanımlanmaktadır:, (2.25) Bu komşuluk kümesinden amaç fonksiyonunu en küçük yapan değer o parçacık için yerel gbest i ifade etmektedir. (2.26) Parçacık sürü optimizasyonunun temel hız ve konum vektörü bu bilgilere göre güncellendiğinde aşağıdaki formüller çıkmaktadır: 14
21 ( ) (2.27) (2.28). Şimdiye kadar yapılmış olan araştırmalar X i parçacığının komşuluğunun [X i-3, X i+3 ] aralığında alınmasının optimal sonucu verdiğini göstermektedir. Algoritmasına komşuluk özelliği eklenmeyen hız düşürücü dizayn optimizasyon probleminde optimal sonuca yaklaşım sağlanamamışken, bu bilgiler doğrultusunda algoritma güncellendiğinde problemin sonucu istenilen doğrultuda çıkmıştır. 15
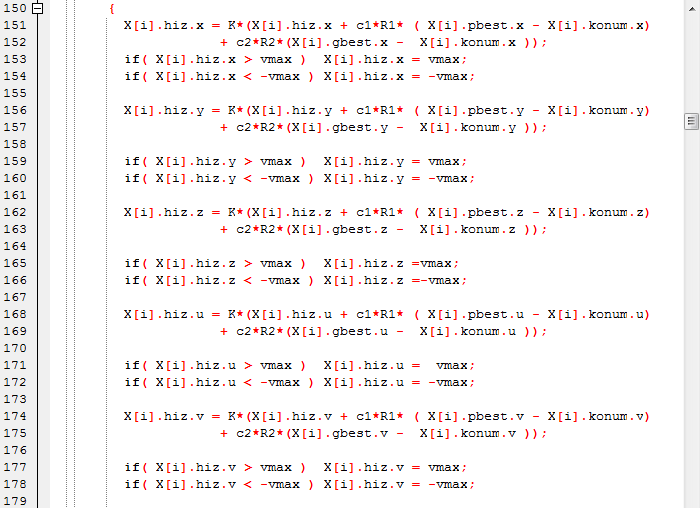
22 3. UYGULAMALAR 3.1. YAY GERİLİM DİZAYNI OPTİMİZASYON PROBLEMİ Şekil 3.1 Şekil 3.1 de yay gerilim dizaynı optimizasyon problemi gösterilmiştir. Bu problemin çözümünde parçacık sürü optimizasyonu yöntemi kullanılmış olup, optimal çözüme ulaşılmıştır. Yöntem 40 parçacık üzerinde uygulanmış ve C 1 ve C 2 sabitleri 2.7 alınmıştır. Bu problemin minimize edilecek olan amaç fonksiyonu aşağıdaki gibidir: Kısıt fonksiyonları aşağıdaki gibidir: Algoritmanın durdurulması için belirlenen kriter; daha iyi sonuca ulaşmaktır. İyi sonuç elde edildikçe sonuçlar ekrana yazılmaktadır. Problemin bilinmeyenlerinin değerleri ile kısıt fonksiyonlarının değerleri dosyaya yazılmaktadır. Elde edilen sonuçlar referans alınan kaynaktaki sonuçlardan daha iyi çıkmıştır. Programın ekran çıktısı Şekil 3.2 de gösterilmiştir. 16
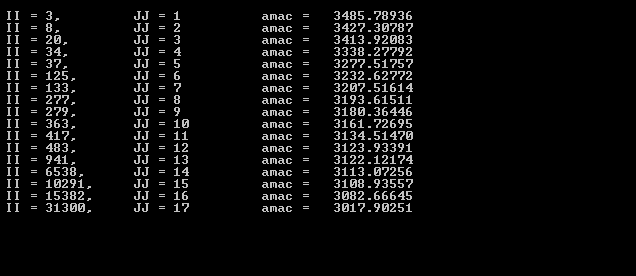
23 Şekil 3.2 Yay dizaynı optimizasyon probleminin parçacaık sürü optimizasyonu yoluyla çözümü ile referans alınan kaynaktaki çözümlerinin karşılaştırılması tablo 3.1 de gösterilmiştir. Bu çalışmadaki değerler Referans alınan kaynaktaki değerler E E Tablo
24 3.2. HIZ DÜŞÜRÜCÜ OPTİMİZASYON PROBLEMİ Şekil 3.3 Şekil 3.3 de hız düşürücü optimizasyon problemi gösterilmiştir. Bu problemin çözümünde parçacık sürü optimizasyonu yöntemi kullanılmış olup, optimal çözüme ulaşılmıştır. Yöntem 40 parçacık üzerinde uygulanmış ve C 1 ve C 2 sabitleri 2,8001 alınmıştır. Bu optimizasyon probleminde minimize edilecek amaç fonksiyonu aşağıdaki gibidir: Kısıt fonksiyonları aşağıdaki gibidir: 18
25 Algoritmanın durdurulması için belirlenen kriter; daha iyi sonuca ulaşmaktır. İyi sonuç elde edildikçe sonuçlar ekrana yazılmaktadır. Problemin bilinmeyenlerinin değerleri ile kısıt fonksiyonlarının değerleri dosyaya yazılmaktadır. Hız düşürücü optimizasyon probleminin parçacık sürü optimizasyonu metoduyla çözümünden elde edilen sonuçlar ile referans alınan kaynaktaki çözümler tablo 3.2 de karşılaştırılmıştır. Program çalıştırıldıktan sonra elde edilen ekran çıktısı şekil 3.4 te gösterilmiştir. Şekil
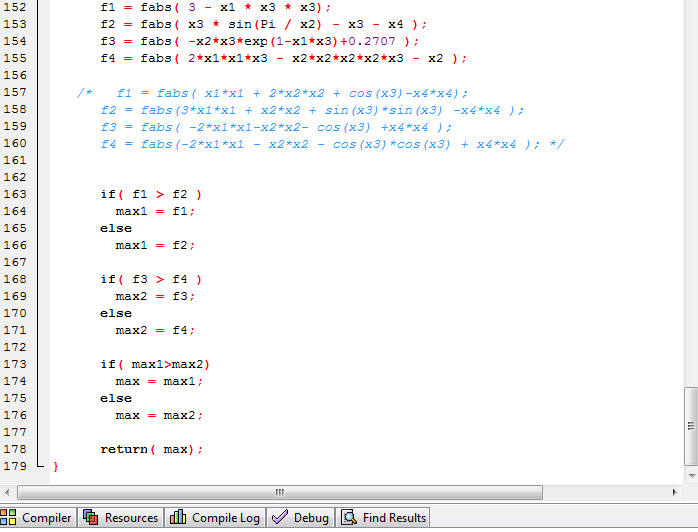
26 Bu çalışmadaki değerler Referans alınan kaynaktaki değerler E E , Tablo DENKLEM SİSTEMLERİNİN KÖKLERİNİN BULUNMASI ( ) Parçacık sürü optimizasyon yöntemi lineer denklem sistemlerinin çözümünde de kullanılmaktadır. Yöntem yukarıdaki denklem sistemine uygulanmış olup, denklemlerin kökleri doğru bir şekilde bulunmuştur. Uygulama 40 parçacık üzerinde yapılmış olup C 1 ve C 2 sabitleri 2.05 olarak alınmıştır. Parçacık sürü optimizasyonu ile denklem sistemlerinin kökleri 20
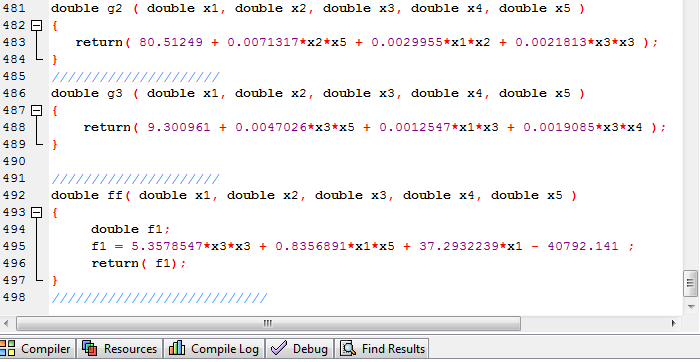
27 bulunurken mutlak değeri en küçük olan denklem seçilir ve işlemler bu denklem üzerinde yapılır. Her iterasyonda denklemlerin değerleri tekrardan hesaplanır, mutlak değeri minimum olan fonksiyon değişiklik gösterebilir. Sıfıra en yakın olan yani mutlak değeri en küçük olan denklemde şartlar sağlandığında diğer denklemlerde de koşullar otomatikman sağlanacaktır. Denklem sistemlerinin çözümünde belirli bir amaç fonksiyonu yoktur. Amaç fonksiyonu her iterasyonda değişebilir HIMMELBLAU NON-LİNEER OPTİMİZASYON PROBLEMİ Parçacık sürü optimizasyon yöntemi non-lineer optimizasyon problemlerinin çözümünde de kullanılmaktadır. Yöntem bir mühendislik optimizasyon problemi olan Himmelblau optimizasyon probleminin çözümünde kullanılmıştır. Uygulama 36 parçacık üzerinde yapılmış olup C 1 ve C 2 sabitleri olarak alınmıştır BAŞLANGIÇ DEĞER PROBLEMLERİ Bu çalışmada sürü optimizasyonu yöntemi ikinci mertebe lineer ve lineer olmayan başlangıç değer problemlerine uygulanmıştır. Yapılan bu uygulama ile ilgili literatürde herhangi bir çalışma bulunamamıştır. En genel ikinci mertebe başlangıç değer problemi; olarak ifade edilebilr. Burada operatördür. ikinci mertebe lineer yada lineer olmayan Sürü optimizasyonunu uygulamak için, ( ) noktaları göz önüne alınarak, herhangi bir için de başlangıç koşullarını ve diferansiyel denklemi sağlayan çözümler şeklinde alınmıştır. Her noktası için katsayılarının her bir seçimi bir parçacık olarak göz önüne alınarak, noktasında başlangıç koşullarını ve diferansiyel denklemi sağlayan en uygun katsayıları belirlenmiştir. İzlenen yol şekil yardımıyla açıklanabilir. Önce,, başlangıç değer problemi, ve ( ) fonksiyonları minimum (sıfır) olacak şekilde çözülüp, belirleniyor. ve ardından, ve 21
28 başlangıç değer problemi çözülüyor. Herhangi i. adım için,, başlangıç değer problemi, ve ( ) ifadeleri minimum olacak şekilde çözülüyor. Aşağıda lineer ve lineer olmayan problemlere örnekler verilmiş ve tam çözüm (analitik çözüm) ile karşılaştırmaları yapılmıştır ÖRNEK 1,, Lineer başlangıç değer probleminin parçacık sürü optimizasyon çözümü ile analitik çözümü grafik 3.1 de gösterilmiştir. Analitik çözüm:. Grafik
29 ÖRNEK 2,, Probleminin analitik çözümü dir. Parçacık sürü optimizasyonu ve analitik çözümler grafik 3.2 de gösterilmiştir. Grafik
30 ÖRNEK 3,, Analitik çözüm: 3.3 te gösterilmiştir.. Analitik çözüm ve sürü optimizasyonu çözümü grafik Grafik
31 ÖRNEK 4 İkinci mertebe lineer olmayan tekil problem göz önüne alınmıştır.,, Analitik çözüm dir. Burada sonuçlar aşağıdaki tabloda gösterilmiştir. PSO ANALİTİK Tablo
32 ÖRNEK 5, Analitik çözüm. Sonuçlar grafik 3.4 te gösterilmiştir. Grafik 3.4 Örneklerden görüleceği gibi lineer problemlerin çözümünde parçacık sürü optimizasyonu yöntemi çok daha iyi sonuç vermektedir. Lineer olmayan durumda x in artan değerleri ile analitik çözümde olan fark büyümektedir. Bu çalışmada polinomlarının derecesi M=6 alınmıştır. Daha büyük M değerleri için, sözü edilen fark azaltılabilir. 26

33 4. EKLER 4.1. YAY GERİLİM DİZAYNI OPTİMİZASYON PROBLEMİ 27
34 28
35 29
36 30
37 31
38 32
39 33

40 4.2. HIZ DÜŞÜRÜCÜ OPTİMİZASYON PROBLEMİ 34
41 35
42 36
43 37
44 38
45 39
46 40
47 41
48 42
49 43
50 44
51 45
52 46
53 47
54 4.3. LİNEER DENKLEM SİSTEMLERİNİN KÖKLERİNİN BULUNMASI 48
55 49
56 50
57 51
58 4.4. HIMMELBLAU NON-LİNEER OPTİMİZASYON PROBLEMİ 52
59 53
60 54
61 55
62 56
63 57
64 58
65 59
66 60
67 4.5. BAŞLANGIÇ DEĞER PROBLEMLERİ ÖRNEK 1 61
68 62
69 63
70 ÖRNEK 2 64
71 65
72 66
73 ÖRNEK 3 67
74 68
75 69
76 ÖRNEK 4 70
77 71
78 72
79 ÖRNEK 5 73
80 74
81 75
82 5. KAYNAKLAR [ 1 ] Parsopoulos, K. E. & Vrahatis, M. N. (2010). Partial Swarm Optimization and Intelligence Advanced and Application. New York: Hershey. [ 2 ] Coello, C. A. (2008). Solving Engineering Optimization Problems with Simple Constrained Particle Swarm Optimizer. Meksika: Mexico D. F. [ 3 ] Bazaraa, M. S. & Sherali, H. D. & Shetty, C. M. (1979). Nonlinear Programming Theory and Algorithms. New York: John Wiley & Sons, Inc [ 4 ] Hu, X. & Eberhart, R. C. & Shi, Y. (2003). Engineering Optimization with Particle Swarm. Conferance Publication. 76
PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN
 PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN 1995 yılında Dr.Eberhart ve Dr.Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir.
PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN 1995 yılında Dr.Eberhart ve Dr.Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir.
Genetik Algoritmalar. Bölüm 1. Optimizasyon. Yrd. Doç. Dr. Adem Tuncer E-posta:
 Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
GENETİK ALGORİTMALAR. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 GENETİK ALGORİTMALAR Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ GENETİK ALGORİTMALAR Genetik algoritmalar, Darwin in doğal seçim ve evrim teorisi ilkelerine dayanan bir arama ve optimizasyon yöntemidir.
GENETİK ALGORİTMALAR Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ GENETİK ALGORİTMALAR Genetik algoritmalar, Darwin in doğal seçim ve evrim teorisi ilkelerine dayanan bir arama ve optimizasyon yöntemidir.
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Genetik Algoritma (Genetic Algorithm) Doç.Dr. M. Ali Akcayol Genetik Algoritma 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik
Zeki Optimizasyon Teknikleri Genetik Algoritma (Genetic Algorithm) Doç.Dr. M. Ali Akcayol Genetik Algoritma 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Tabu Arama (Tabu Search) Doç.Dr. M. Ali Akcayol Tabu Arama 1986 yılında Glover tarafından geliştirilmiştir. Lokal minimum u elimine edebilir ve global minimum u bulur. Değerlendirme
Zeki Optimizasyon Teknikleri Tabu Arama (Tabu Search) Doç.Dr. M. Ali Akcayol Tabu Arama 1986 yılında Glover tarafından geliştirilmiştir. Lokal minimum u elimine edebilir ve global minimum u bulur. Değerlendirme
GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA
 BİNARİ KODLANMIŞ GA") GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği
GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği
Deniz ERSOY Elektrik Yük. Müh.
 Deniz ERSOY Elektrik Yük. Müh. AMACIMIZ Yenilenebilir enerji kaynaklarının tesis edilmesi ve enerji üretimi pek çok araştırmaya konu olmuştur. Fosil yakıtların giderek artan maliyeti ve giderek tükeniyor
Deniz ERSOY Elektrik Yük. Müh. AMACIMIZ Yenilenebilir enerji kaynaklarının tesis edilmesi ve enerji üretimi pek çok araştırmaya konu olmuştur. Fosil yakıtların giderek artan maliyeti ve giderek tükeniyor
METASEZGİSEL YÖNTEMLER
 METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
KARINCA KOLONİ ALGORİTMASI BMÜ-579 Meta Sezgisel Yöntemler. Yrd. Doç. Dr. İlhan AYDIN Fırat Üniversitesi, Bilgisayar Mühendisliği Bölümü
 KARINCA KOLONİ ALGORİTMASI BMÜ-579 Meta Sezgisel Yöntemler Yrd. Doç. Dr. İlhan AYDIN Fırat Üniversitesi, Bilgisayar Mühendisliği Bölümü Karınca Koloni Algoritması Bilim adamları, böcek davranışlarını inceleyerek
KARINCA KOLONİ ALGORİTMASI BMÜ-579 Meta Sezgisel Yöntemler Yrd. Doç. Dr. İlhan AYDIN Fırat Üniversitesi, Bilgisayar Mühendisliği Bölümü Karınca Koloni Algoritması Bilim adamları, böcek davranışlarını inceleyerek
GENETİK ALGORİTMA ÖZNUR CENGİZ HİLAL KOCA
 GENETİK ALGORİTMA ÖZNUR CENGİZ 201410306014 HİLAL KOCA 150306024 GENETİK ALGORİTMA Genetik Algoritma yaklaşımının ortaya çıkışı 1970 lerin başında olmuştur. 1975 te John Holland ın makine öğrenmesi üzerine
GENETİK ALGORİTMA ÖZNUR CENGİZ 201410306014 HİLAL KOCA 150306024 GENETİK ALGORİTMA Genetik Algoritma yaklaşımının ortaya çıkışı 1970 lerin başında olmuştur. 1975 te John Holland ın makine öğrenmesi üzerine
Tek Değişkenli Optimizasyon OPTİMİZASYON. Gradient Tabanlı Yöntemler. Bisection (İkiye Bölme) Yöntemi
 Yöntemi") OPTİMİZASYON Gerçek hayatta, çok değişkenli optimizasyon problemleri karmaşıktır ve nadir olarak problem tek değişkenli olur. Bununla birlikte, tek değişkenli optimizasyon algoritmaları çok değişkenli
OPTİMİZASYON Gerçek hayatta, çok değişkenli optimizasyon problemleri karmaşıktır ve nadir olarak problem tek değişkenli olur. Bununla birlikte, tek değişkenli optimizasyon algoritmaları çok değişkenli
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Bu bölümde eşitsizlik kısıtlarına bağlı bir doğrusal olmayan kısıta sahip problemin belirlenen stasyoner noktaları
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Bu bölümde eşitsizlik kısıtlarına bağlı bir doğrusal olmayan kısıta sahip problemin belirlenen stasyoner noktaları
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
OPTİMİZASYON TEKNİKLERİ. Kısıtsız Optimizasyon
 OPTİMİZASYON TEKNİKLERİ Kısıtsız Optimizasyon Giriş Klasik optimizasyon yöntemleri minimum veya maksimum değerlerini bulmak için türev gerektiren ve gerektirmeyen teknikler olarak bilinirler. Bu yöntemler
OPTİMİZASYON TEKNİKLERİ Kısıtsız Optimizasyon Giriş Klasik optimizasyon yöntemleri minimum veya maksimum değerlerini bulmak için türev gerektiren ve gerektirmeyen teknikler olarak bilinirler. Bu yöntemler
GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA
 BİNARİ KODLANMIŞ GA") GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği
GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği
YZM 5257 YAPAY ZEKA VE UZMAN SİSTEMLER DERS#6: GENETİK ALGORİTMALAR
 YZM 5257 YAPAY ZEKA VE UZMAN SİSTEMLER DERS#6: GENETİK ALGORİTMALAR Sınıflandırma Yöntemleri: Karar Ağaçları (Decision Trees) Örnek Tabanlı Yöntemler (Instance Based Methods): k en yakın komşu (k nearest
YZM 5257 YAPAY ZEKA VE UZMAN SİSTEMLER DERS#6: GENETİK ALGORİTMALAR Sınıflandırma Yöntemleri: Karar Ağaçları (Decision Trees) Örnek Tabanlı Yöntemler (Instance Based Methods): k en yakın komşu (k nearest
SAYISAL ÇÖZÜMLEME. Sayısal Çözümleme
 SAYISAL ÇÖZÜMLEME 1 SAYISAL ÇÖZÜMLEME 4. Hafta DENKLEM ÇÖZÜMLERİ 2 İÇİNDEKİLER Denklem Çözümleri Doğrusal Olmayan Denklem Çözümleri Grafik Yöntemleri Kapalı Yöntemler İkiye Bölme (Bisection) Yöntemi Adım
SAYISAL ÇÖZÜMLEME 1 SAYISAL ÇÖZÜMLEME 4. Hafta DENKLEM ÇÖZÜMLERİ 2 İÇİNDEKİLER Denklem Çözümleri Doğrusal Olmayan Denklem Çözümleri Grafik Yöntemleri Kapalı Yöntemler İkiye Bölme (Bisection) Yöntemi Adım
BBO Algoritmasının Optimizasyon Başarımının İncelenmesi Optimization Performance Investigation of BBO Algorithm
 BBO Algoritmasının Optimizasyon Başarımının İncelenmesi Optimization Performance Investigation of BBO Algorithm Tufan İNAÇ 1, Cihan KARAKUZU 2 1 Bilgisayar Mühendisliği Anabilim Dalı Bilecik Şeyh Edebali
BBO Algoritmasının Optimizasyon Başarımının İncelenmesi Optimization Performance Investigation of BBO Algorithm Tufan İNAÇ 1, Cihan KARAKUZU 2 1 Bilgisayar Mühendisliği Anabilim Dalı Bilecik Şeyh Edebali
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Altın Oran (Golden Section Search) Arama Metodu Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Altın Oran (Golden Section Search) Arama Metodu Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f
CBS ve Coğrafi Hesaplama
 Yıldız Teknik Üniversitesi CBS ve Coğrafi Hesaplama 2. Bölüm Yrd. Doç. Dr. Alper ŞEN Harita Mühendisliği Bölümü Kartografya Anabilim Dalı web: http://www.yarbis.yildiz.edu.tr/alpersen/ E mail: alpersen@yildiz.edu.tr
Yıldız Teknik Üniversitesi CBS ve Coğrafi Hesaplama 2. Bölüm Yrd. Doç. Dr. Alper ŞEN Harita Mühendisliği Bölümü Kartografya Anabilim Dalı web: http://www.yarbis.yildiz.edu.tr/alpersen/ E mail: alpersen@yildiz.edu.tr
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
KRİPTOANALİZ DERSİ FİNAL ÖDEVİ. PSO ile TRANSPOSITION CIPHER ÇÖZÜMÜ
 KRİPTOANALİZ DERSİ FİNAL ÖDEVİ PSO ile TRANSPOSITION CIPHER ÇÖZÜMÜ 1 Uygulama Hakkında PSO kullanılarak şifreli metnin çözümü gerçekleştirilmiştir. Metin dosyadan okunmuştur. Okunan metin rastgele üretilen
KRİPTOANALİZ DERSİ FİNAL ÖDEVİ PSO ile TRANSPOSITION CIPHER ÇÖZÜMÜ 1 Uygulama Hakkında PSO kullanılarak şifreli metnin çözümü gerçekleştirilmiştir. Metin dosyadan okunmuştur. Okunan metin rastgele üretilen
OPTİMUM GÜÇ AKIŞININ YAPAY ARI KOLONİSİ İLE SAĞLANMASI
 OPTİMUM GÜÇ AKIŞININ YAPAY ARI KOLONİSİ İLE SAĞLANMASI A. Doğan 1 M. Alçı 2 Erciyes Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü 1 ahmetdogan@erciyes.edu.tr 2 malci@erciyes.edu.tr
OPTİMUM GÜÇ AKIŞININ YAPAY ARI KOLONİSİ İLE SAĞLANMASI A. Doğan 1 M. Alçı 2 Erciyes Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü 1 ahmetdogan@erciyes.edu.tr 2 malci@erciyes.edu.tr
YÖNEYLEM ARAŞTIRMASI - I
 YÖNEYLEM ARAŞTIRMASI - I 1/19 İçerik Yöneylem Araştırmasının Dalları Kullanım Alanları Yöneylem Araştırmasında Bazı Yöntemler Doğrusal (Lineer) Programlama, Oyun Teorisi, Dinamik Programlama, Tam Sayılı
YÖNEYLEM ARAŞTIRMASI - I 1/19 İçerik Yöneylem Araştırmasının Dalları Kullanım Alanları Yöneylem Araştırmasında Bazı Yöntemler Doğrusal (Lineer) Programlama, Oyun Teorisi, Dinamik Programlama, Tam Sayılı
Esnek Hesaplamaya Giriş
 Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
KISITLI OPTİMİZASYON
 KISITLI OPTİMİZASYON SİMPLEKS YÖNTEMİ Simpleks Yöntemi Simpleks yöntemi iteratif bir prosedürü gerektirir. Bu iterasyonlar ile gerçekçi çözümlerin olduğu bölgenin (S) bir köşesinden başlayarak amaç fonksiyonunun
KISITLI OPTİMİZASYON SİMPLEKS YÖNTEMİ Simpleks Yöntemi Simpleks yöntemi iteratif bir prosedürü gerektirir. Bu iterasyonlar ile gerçekçi çözümlerin olduğu bölgenin (S) bir köşesinden başlayarak amaç fonksiyonunun
T.C. DOKUZ EYLÜL ÜNİVERSİTESİ SOSYAL BİLİMLER ENSTİTÜSÜ EKONOMETRİ ANABİLİM DALI EKONOMETRİ DOKTORA PROGRAMI
 T.C. DOKUZ EYLÜL ÜNİVERSİTESİ SOSYAL BİLİMLER ENSTİTÜSÜ EKONOMETRİ ANABİLİM DALI EKONOMETRİ DOKTORA PROGRAMI Genişletilmiş Lagrange Yöntemi Hazırlayan: Nicat GASIM Öğretim Üyesi Prof. Dr. İpek Deveci KARAKOÇ
T.C. DOKUZ EYLÜL ÜNİVERSİTESİ SOSYAL BİLİMLER ENSTİTÜSÜ EKONOMETRİ ANABİLİM DALI EKONOMETRİ DOKTORA PROGRAMI Genişletilmiş Lagrange Yöntemi Hazırlayan: Nicat GASIM Öğretim Üyesi Prof. Dr. İpek Deveci KARAKOÇ
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU
 METODU") ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics
 2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics Özet: Bulanık bir denetleyici tasarlanırken karşılaşılan en önemli sıkıntı, bulanık giriş çıkış üyelik fonksiyonlarının
2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics Özet: Bulanık bir denetleyici tasarlanırken karşılaşılan en önemli sıkıntı, bulanık giriş çıkış üyelik fonksiyonlarının
KİNETİK MODEL PARAMETRELERİNİN BELİRLENMESİNDE KULLANILAN OPTİMİZASYON TEKNİKLERİNİN KIYASLANMASI
 KİNETİK MODEL PARAMETRELERİNİN BELİRLENMESİNDE KULLANILAN OPTİMİZASYON TEKNİKLERİNİN KIYASLANMASI Hatice YANIKOĞLU a, Ezgi ÖZKARA a, Mehmet YÜCEER a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği
KİNETİK MODEL PARAMETRELERİNİN BELİRLENMESİNDE KULLANILAN OPTİMİZASYON TEKNİKLERİNİN KIYASLANMASI Hatice YANIKOĞLU a, Ezgi ÖZKARA a, Mehmet YÜCEER a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği
BİRİNCİ BASIMA ÖN SÖZ
 BİRİNCİ BASIMA ÖN SÖZ Varlıkların kendilerinde cereyan eden olayları ve varlıklar arasındaki ilişkileri inceleyerek anlamak ve bunları bilgi formuna dökmek kimya, biyoloji, fizik ve astronomi gibi temel
BİRİNCİ BASIMA ÖN SÖZ Varlıkların kendilerinde cereyan eden olayları ve varlıklar arasındaki ilişkileri inceleyerek anlamak ve bunları bilgi formuna dökmek kimya, biyoloji, fizik ve astronomi gibi temel
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Quadratic Programming Bir karesel programlama modeli aşağıdaki gibi tanımlanır. Amaç fonksiyonu: Maks.(veya Min.) z
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Quadratic Programming Bir karesel programlama modeli aşağıdaki gibi tanımlanır. Amaç fonksiyonu: Maks.(veya Min.) z
Kısıtsız Optimizasyon OPTİMİZASYON Kısıtsız Optimizasyon
 OPTİMİZASYON Bu bölümde çok değişkenli kısıtsız optimizasyon problemlerinin çözüm yöntemleri incelenecektir. Bu bölümde anlatılacak yöntemler, kısıtlı optimizasyon problemlerini de çözebilmektedir. Bunun
OPTİMİZASYON Bu bölümde çok değişkenli kısıtsız optimizasyon problemlerinin çözüm yöntemleri incelenecektir. Bu bölümde anlatılacak yöntemler, kısıtlı optimizasyon problemlerini de çözebilmektedir. Bunun
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ANKARA
 GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ANKARA") i GENETİK ALGORİTMA YAKLAŞIMIYLA ATÖLYE ÇİZELGELEME Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ OCAK 2005 ANKARA ii Serdar BİROĞUL tarafından hazırlanan
i GENETİK ALGORİTMA YAKLAŞIMIYLA ATÖLYE ÇİZELGELEME Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ OCAK 2005 ANKARA ii Serdar BİROĞUL tarafından hazırlanan
GENETİK ALGORİTMALAR BÜŞRA GÜRACAR
 GENETİK ALGORİTMALAR BÜŞRA GÜRACAR 201420404036 İÇERİK Genetik Algoritmanın, Amacı Kullanım Alanları Kavramları Uygulama Adımları Parametreler Genetik Algoritma Kodlama Türleri Genetik Algoritma Genetik
GENETİK ALGORİTMALAR BÜŞRA GÜRACAR 201420404036 İÇERİK Genetik Algoritmanın, Amacı Kullanım Alanları Kavramları Uygulama Adımları Parametreler Genetik Algoritma Kodlama Türleri Genetik Algoritma Genetik
EKSPONANSİYEL AĞIRLIKLI PARÇACIK SÜRÜ ALGORİTMASI İLE TORNALAMA İŞLEMLERİNDE KESME KOŞULLARININ OPTİMİZASYONU
 EKSPONANSİYEL AĞIRLIKLI PARÇACIK SÜRÜ ALGORİTMASI İLE TORNALAMA İŞLEMLERİNDE KESME KOŞULLARININ OPTİMİZASYONU *Yasin CANTAŞ 1, Burhanettin DURMUŞ 2 1 Sakarya Üniversitesi, Teknoloji Fakültesi, Elektrik-Elektronik
EKSPONANSİYEL AĞIRLIKLI PARÇACIK SÜRÜ ALGORİTMASI İLE TORNALAMA İŞLEMLERİNDE KESME KOŞULLARININ OPTİMİZASYONU *Yasin CANTAŞ 1, Burhanettin DURMUŞ 2 1 Sakarya Üniversitesi, Teknoloji Fakültesi, Elektrik-Elektronik
YAPAY SİNİR AĞLARI. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
OYUN TEORİSİ. Özlem AYDIN. Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü
 OYUN TEORİSİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü TANIM ''Oyun Teorisi'', iki yada daha fazla rakibi belirli kurallar altında birleştirerek karşılıklı olarak çelişen olasılıklar
OYUN TEORİSİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü TANIM ''Oyun Teorisi'', iki yada daha fazla rakibi belirli kurallar altında birleştirerek karşılıklı olarak çelişen olasılıklar
Parçacık Sürü Optimizasyonunda Yeni Bir Birey Davranış Biçimi Önerisi
 Parçacık Sürü Optimizasyonunda Yeni Bir Birey Davranış Biçimi Önerisi Ö. Tolga ALTINÖZ A. Egemen YILMAZ Endüstriyel Elektronik Bölümü, Bala Meslek Yüksekokulu, Hacettepe Üniversitesi, Ankara Elektronik
Parçacık Sürü Optimizasyonunda Yeni Bir Birey Davranış Biçimi Önerisi Ö. Tolga ALTINÖZ A. Egemen YILMAZ Endüstriyel Elektronik Bölümü, Bala Meslek Yüksekokulu, Hacettepe Üniversitesi, Ankara Elektronik
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Hessien Matris-Quadratik Form Mutlak ve Bölgesel Maksimum-Minimum Noktalar Giriş Kısıtlı ve kısıtsız fonksiyonlar için
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Hessien Matris-Quadratik Form Mutlak ve Bölgesel Maksimum-Minimum Noktalar Giriş Kısıtlı ve kısıtsız fonksiyonlar için
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ. Ders 1- Yapay Zekâya Giriş. Erhan AKDOĞAN, Ph.D.
 Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Uzaktan Algılama Teknolojileri
 Uzaktan Algılama Teknolojileri Ders 11 Hiperspektral Görüntülerde Kümeleme ve Sınıflandırma Alp Ertürk alp.erturk@kocaeli.edu.tr Sınıflandırma Sınıflandırma işleminin amacı, her piksel vektörüne bir ve
Uzaktan Algılama Teknolojileri Ders 11 Hiperspektral Görüntülerde Kümeleme ve Sınıflandırma Alp Ertürk alp.erturk@kocaeli.edu.tr Sınıflandırma Sınıflandırma işleminin amacı, her piksel vektörüne bir ve
ERCİYES ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTUSÜ BİLGİSAYAR MÜHENDİSLİĞİ ANABİLİMDALI. I. GENEL BİLGİLER Ders Adı
 BİM618 Evrimsel Algoritmalar Öğretim Üyesi Prof. Dr. Derviş Karaboğa Görüşme Saatleri 8.00-17.00 E posta: karaboga@erciyes.edu.tr http://abis.erciyes.edu.tr/sorgu.aspx?sorgu=236 Erciyes Üniversitesi, Mühendislik
BİM618 Evrimsel Algoritmalar Öğretim Üyesi Prof. Dr. Derviş Karaboğa Görüşme Saatleri 8.00-17.00 E posta: karaboga@erciyes.edu.tr http://abis.erciyes.edu.tr/sorgu.aspx?sorgu=236 Erciyes Üniversitesi, Mühendislik
2. Klasik Kümeler-Bulanık Kümeler
 2. Klasik Kümeler-Bulanık Kümeler Klasik Küme Teorisi Klasik kümelerde bir nesnenin bir kümeye üye olması ve üye olmaması söz konusudur. Bu yaklaşıma göre istediğimiz özelliğe sahip olan bir birey, eleman
2. Klasik Kümeler-Bulanık Kümeler Klasik Küme Teorisi Klasik kümelerde bir nesnenin bir kümeye üye olması ve üye olmaması söz konusudur. Bu yaklaşıma göre istediğimiz özelliğe sahip olan bir birey, eleman
Kaotik Tabanlı Diferansiyel (Farksal) Gelişim Algoritması
 Gelişim Algoritması") Kaotik Tabanlı Diferansiyel (Farksal) Gelişim Algoritması 1 Mehmet Eser * 1 Uğur Yüzgeç 1 Bilecik Şeyh Edebali Üniversitesi, Bilgisayar Mühendisliği Bölümü, 111, Gülümbe, Bilecik 1. Giriş Abstract Differential
Kaotik Tabanlı Diferansiyel (Farksal) Gelişim Algoritması 1 Mehmet Eser * 1 Uğur Yüzgeç 1 Bilecik Şeyh Edebali Üniversitesi, Bilgisayar Mühendisliği Bölümü, 111, Gülümbe, Bilecik 1. Giriş Abstract Differential
Yapay Zeka Yöntemlerinin Otomotiv Sektöründe Ürün Tasarımı Çalışmalarında Kullanılması
 Yapay Zeka Yöntemlerinin Otomotiv Sektöründe Ürün Tasarımı Çalışmalarında Kullanılması Doç. Dr. Ali Rıza YILDIZ 04.11.2014 Doç. Dr. Ali Rıza YILDIZ - "Hibrid Evrimsel Yöntemler İle Taşıt Elemanlarının
Yapay Zeka Yöntemlerinin Otomotiv Sektöründe Ürün Tasarımı Çalışmalarında Kullanılması Doç. Dr. Ali Rıza YILDIZ 04.11.2014 Doç. Dr. Ali Rıza YILDIZ - "Hibrid Evrimsel Yöntemler İle Taşıt Elemanlarının
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
 17.05.2014 Sayfa 1 ÖZET Bu eser veri noktalarının bir yüzeyinin generasyonu olan yüzey rekonstrüksiyonu konusu ile ilgilenir. Yaklaşımımız metaheurestic algoritmaya dayalıdır. (Particle Swarm Optimization)
17.05.2014 Sayfa 1 ÖZET Bu eser veri noktalarının bir yüzeyinin generasyonu olan yüzey rekonstrüksiyonu konusu ile ilgilenir. Yaklaşımımız metaheurestic algoritmaya dayalıdır. (Particle Swarm Optimization)
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
Başlangıç Temel Programının Bilinmemesi Durumu
 aşlangıç Temel Programının ilinmemesi Durumu İlgili kısıtlarda şartlar ( ) ise bunlara gevşek (slack) değişkenler eklenerek eşitliklere dönüştürülmektedir. Ancak sınırlayıcı şartlar ( ) veya ( = ) olduğu
aşlangıç Temel Programının ilinmemesi Durumu İlgili kısıtlarda şartlar ( ) ise bunlara gevşek (slack) değişkenler eklenerek eşitliklere dönüştürülmektedir. Ancak sınırlayıcı şartlar ( ) veya ( = ) olduğu
KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I
 KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I 4.1. Dışbükeylik ve Uç Nokta Bir d.p.p. de model kısıtlarını aynı anda sağlayan X X X karar değişkenleri... n vektörüne çözüm denir. Eğer bu
KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I 4.1. Dışbükeylik ve Uç Nokta Bir d.p.p. de model kısıtlarını aynı anda sağlayan X X X karar değişkenleri... n vektörüne çözüm denir. Eğer bu
Self Organising Migrating Algorithm
 OPTİMİZASYON TEKNİKLERİ Self Organising Migrating Algorithm Kendini Organize Eden Göç/Geçiş Algoritması MELİH HİLMİ ULUDAĞ Fırat Üniversitesi Teknoloji Fakültesi Yazılım Mühendisliği Bölümü İletişim: www.melihhilmiuludag.com
OPTİMİZASYON TEKNİKLERİ Self Organising Migrating Algorithm Kendini Organize Eden Göç/Geçiş Algoritması MELİH HİLMİ ULUDAĞ Fırat Üniversitesi Teknoloji Fakültesi Yazılım Mühendisliği Bölümü İletişim: www.melihhilmiuludag.com
EMM4131 Popülasyon Temelli Algoritmalar (Population-based Algorithms)
") 2017-2018 Güz Yarıyılı EMM4131 Popülasyon Temelli Algoritmalar (Population-based Algorithms) 4 Genetik Algoritma Örnek Uygulamalar (Sırt Çantası Problemi, Sınav Programı Çizelgeleme) Yrd. Doç. Dr. İbrahim
2017-2018 Güz Yarıyılı EMM4131 Popülasyon Temelli Algoritmalar (Population-based Algorithms) 4 Genetik Algoritma Örnek Uygulamalar (Sırt Çantası Problemi, Sınav Programı Çizelgeleme) Yrd. Doç. Dr. İbrahim
AST416 Astronomide Sayısal Çözümleme - II. 6. Monte Carlo
 AST416 Astronomide Sayısal Çözümleme - II 6. Monte Carlo Bu derste neler öğreneceksiniz? Monte Carlo Yöntemleri Markov Zinciri (Markov Chain) Rastgele Yürüyüş (Random Walk) Markov Chain Monte Carlo, MCMC
AST416 Astronomide Sayısal Çözümleme - II 6. Monte Carlo Bu derste neler öğreneceksiniz? Monte Carlo Yöntemleri Markov Zinciri (Markov Chain) Rastgele Yürüyüş (Random Walk) Markov Chain Monte Carlo, MCMC
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik (Eşitlik Kısıtlı Türevli Yöntem) Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik (Eşitlik Kısıtlı Türevli Yöntem) Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde
... ROBOTİK VE KODLAMA EĞİTİMİ ÇERÇEVESİNDE ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ DERSİ ÜNİTELENDİRİLMİŞ YILLIK DERS PLANI
 ... ROBOTİK VE KODLAMA EĞİTİMİ ÇERÇEVESİNDE 2018 2019 ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ DERSİ ÜNİTELENDİRİLMİŞ YILLIK DERS PLANI Hazırlayan : Özel Öğretim Kurumları Birliği (ÖZKURBİR) Dersin Adı : Bilişim
... ROBOTİK VE KODLAMA EĞİTİMİ ÇERÇEVESİNDE 2018 2019 ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ DERSİ ÜNİTELENDİRİLMİŞ YILLIK DERS PLANI Hazırlayan : Özel Öğretim Kurumları Birliği (ÖZKURBİR) Dersin Adı : Bilişim
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yöneylem Araştırması II
 Yöneylem Araştırması II Öğr. Gör. Dr. Hakan ÇERÇİOĞLU cercioglu@gazi.edu.tr BÖLÜM I: Doğrusal Programlama Tekrarı Doğrusal Programlama Tanımı Doğrusal Programlama Varsayımları Grafik Çözüm Metodu Simpleks
Yöneylem Araştırması II Öğr. Gör. Dr. Hakan ÇERÇİOĞLU cercioglu@gazi.edu.tr BÖLÜM I: Doğrusal Programlama Tekrarı Doğrusal Programlama Tanımı Doğrusal Programlama Varsayımları Grafik Çözüm Metodu Simpleks
ENDÜSTRİ MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 ENDÜSTRİ MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati Kredi AKTS (T+U+L) ŞEBEKE MODELLERİ EN-413 4/I 3+0+0 3 5 Dersin Dili : İngilizce Dersin Seviyesi : Lisans
ENDÜSTRİ MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati Kredi AKTS (T+U+L) ŞEBEKE MODELLERİ EN-413 4/I 3+0+0 3 5 Dersin Dili : İngilizce Dersin Seviyesi : Lisans
ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ
 ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü ULAŞTıRMA MODELININ TANıMı Ulaştırma modeli, doğrusal programlama probleminin özel bir şeklidir.
ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü ULAŞTıRMA MODELININ TANıMı Ulaştırma modeli, doğrusal programlama probleminin özel bir şeklidir.
Zeki Optimizasyon Teknikleri. Karınca Algoritması (Ant Algorithm)
") Zeki Optimizasyon Teknikleri Karınca Algoritması (Ant Algorithm) Karınca Algoritması 1996 yılında Marco Dorigo tarafından ortaya atılmıştır. Temel olarak karıncaların yiyecek madde ile yuvaları arasındaki
Zeki Optimizasyon Teknikleri Karınca Algoritması (Ant Algorithm) Karınca Algoritması 1996 yılında Marco Dorigo tarafından ortaya atılmıştır. Temel olarak karıncaların yiyecek madde ile yuvaları arasındaki
GENETİK ALGORİTMALARA GİRİŞ
 GENETİK ALGORİTMALARA GİRİŞ Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği Bölümü Konuralp 81620 Düzce
GENETİK ALGORİTMALARA GİRİŞ Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği Bölümü Konuralp 81620 Düzce
Programlama Dilleri 1. Ders 3: Rastgele sayı üretimi ve uygulamaları
 Ders 3: Rastgele sayı üretimi ve uygulamaları Ders 3 Genel Bakış Giriş Rastgele Sayı Rastgele Sayı Üreteci rand Fonksiyonunun İşlevi srand Fonksiyonunun İşlevi Monte Carlo Yöntemi Uygulama 1: Yazı-Tura
Ders 3: Rastgele sayı üretimi ve uygulamaları Ders 3 Genel Bakış Giriş Rastgele Sayı Rastgele Sayı Üreteci rand Fonksiyonunun İşlevi srand Fonksiyonunun İşlevi Monte Carlo Yöntemi Uygulama 1: Yazı-Tura
EM302 Yöneylem Araştırması 2 Doğrusal Olmayan Programlamaya Giriş. Dr. Özgür Kabak
 EM302 Yöneylem Araştırması 2 Doğrusal Olmayan Programlamaya Giriş Dr. Özgür Kabak Doğrusal Olmayan Programlama Eğer bir Matematiksel Programlama modelinin amaç fonksiyonu ve/veya kısıtları doğrusal değil
EM302 Yöneylem Araştırması 2 Doğrusal Olmayan Programlamaya Giriş Dr. Özgür Kabak Doğrusal Olmayan Programlama Eğer bir Matematiksel Programlama modelinin amaç fonksiyonu ve/veya kısıtları doğrusal değil
ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ
 ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü ULAŞTIRMA MODELİNİN TANIMI Ulaştırma modeli, doğrusal programlama probleminin özel bir şeklidir.
ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü ULAŞTIRMA MODELİNİN TANIMI Ulaştırma modeli, doğrusal programlama probleminin özel bir şeklidir.
DOĞRUSAL PROGRAMLAMADA DUALİTE (DUALITY)
") DOĞRUSAL PROGRAMLAMADA DUALİTE (DUALITY) 1 DOĞRUSAL PROGRAMLAMADA İKİLİK (DUALİTE-DUALITY) Doğrusal programlama modelleri olarak adlandırılır. Aynı modelin değişik bir düzende oluşturulmasıyla Dual (İkilik)
DOĞRUSAL PROGRAMLAMADA DUALİTE (DUALITY) 1 DOĞRUSAL PROGRAMLAMADA İKİLİK (DUALİTE-DUALITY) Doğrusal programlama modelleri olarak adlandırılır. Aynı modelin değişik bir düzende oluşturulmasıyla Dual (İkilik)
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
 17.05.2014 Sayfa 1 Curve Fitting with RBS Functional Networks RBS fonksiyonel ağı ile eğri uygunluğu Andr es Iglesias, Akemi G alvez Department of Applied Mathematics and Computational Sciences, University
17.05.2014 Sayfa 1 Curve Fitting with RBS Functional Networks RBS fonksiyonel ağı ile eğri uygunluğu Andr es Iglesias, Akemi G alvez Department of Applied Mathematics and Computational Sciences, University
GÜNEŞ ENERJİSİ VE RÜZGÂR ENERJİSİ DÂHİL OLAN HİBRİT GÜÇ SİSTEMİNDE FARKLI ALGORİTMALAR İLE EKONOMİK YÜK DAĞITIMININ İNCELENMESİ
 3. İzmir Rüzgâr Sempozyumu // 8-10 Ekim 2015 // İzmir 29 GÜNEŞ ENERJİSİ VE RÜZGÂR ENERJİSİ DÂHİL OLAN HİBRİT GÜÇ SİSTEMİNDE FARKLI ALGORİTMALAR İLE EKONOMİK YÜK DAĞITIMININ İNCELENMESİ Gül Kurt 1, Deniz
3. İzmir Rüzgâr Sempozyumu // 8-10 Ekim 2015 // İzmir 29 GÜNEŞ ENERJİSİ VE RÜZGÂR ENERJİSİ DÂHİL OLAN HİBRİT GÜÇ SİSTEMİNDE FARKLI ALGORİTMALAR İLE EKONOMİK YÜK DAĞITIMININ İNCELENMESİ Gül Kurt 1, Deniz
Altın Oran Arama Metodu(Golden Search)
") Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
Altın Oran Arama Metodu(Golden Search) Bir f(x) (tek değişkenli) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x) a x b
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
ERCİYES ÜNİVERSİTESİ KİMYA ANABİLİM DALI
 İlaç Tasarımında Yeni Yazılımların Geliştirilmesi: Elektron Konformasyonel-Genetik Algoritma Metodu ile Triaminotriazin Bileşiklerinde Farmakofor Belirlenmesi ve Nicel Biyoaktivite Hesabı; ERCİYES ÜNİVERSİTESİ
İlaç Tasarımında Yeni Yazılımların Geliştirilmesi: Elektron Konformasyonel-Genetik Algoritma Metodu ile Triaminotriazin Bileşiklerinde Farmakofor Belirlenmesi ve Nicel Biyoaktivite Hesabı; ERCİYES ÜNİVERSİTESİ
GENETİK ALGORİTMA İLE RÜZGAR TÜRBİNİ KANAT SAYISI SEÇİMİ
 VI. Ulusal Temiz Enerji Sempozyumu UTES 2006 25 27 Mayıs 2006, Isparta Sf.756 764 GENETİK ALGORİTMA İLE RÜZGAR TÜRBİNİ KANAT SAYISI SEÇİMİ Nida Nurbay ve Ali Çınar Kocaeli Üniversitesi Tek. Eğt. Fak. Makine
VI. Ulusal Temiz Enerji Sempozyumu UTES 2006 25 27 Mayıs 2006, Isparta Sf.756 764 GENETİK ALGORİTMA İLE RÜZGAR TÜRBİNİ KANAT SAYISI SEÇİMİ Nida Nurbay ve Ali Çınar Kocaeli Üniversitesi Tek. Eğt. Fak. Makine
DERS ÖĞRETİM PROGRAMI FORMU
 DERS ÖĞRETİM PROGRAMI FORMU Dersin Adı Kodu Normal Kredisi ECTS Ders 4 Yarıyılı Kredisi uygulama 0 Diferansiyel Denklemler 0252311 3 4 6 Laboratuvar 0 (Saat/Hafta) Dersin Dili Türkçe Dersin Türü Zorunlu
DERS ÖĞRETİM PROGRAMI FORMU Dersin Adı Kodu Normal Kredisi ECTS Ders 4 Yarıyılı Kredisi uygulama 0 Diferansiyel Denklemler 0252311 3 4 6 Laboratuvar 0 (Saat/Hafta) Dersin Dili Türkçe Dersin Türü Zorunlu
Kesikli Programlama (IE 506) Ders Detayları
 Ders Detayları") Kesikli Programlama (IE 506) Ders Detayları Ders Adı Ders Dönemi Ders Uygulama Laboratuar Kredi AKTS Kodu Saati Saati Saati Kesikli Programlama IE 506 Güz 3 0 0 3 7.5 Ön Koşul Ders(ler)i Dersin Dili Dersin
Kesikli Programlama (IE 506) Ders Detayları Ders Adı Ders Dönemi Ders Uygulama Laboratuar Kredi AKTS Kodu Saati Saati Saati Kesikli Programlama IE 506 Güz 3 0 0 3 7.5 Ön Koşul Ders(ler)i Dersin Dili Dersin
Bir Doğrusal Programlama Modelinin Genel Yapısı
 Bir Doğrusal Programlama Modelinin Genel Yapısı Amaç Fonksiyonu Kısıtlar M i 1 N Z j 1 N j 1 a C j x j ij x j B i Karar Değişkenleri x j Pozitiflik Koşulu x j >= 0 Bu formülde kullanılan matematik notasyonların
Bir Doğrusal Programlama Modelinin Genel Yapısı Amaç Fonksiyonu Kısıtlar M i 1 N Z j 1 N j 1 a C j x j ij x j B i Karar Değişkenleri x j Pozitiflik Koşulu x j >= 0 Bu formülde kullanılan matematik notasyonların
yöneylem araştırması Nedensellik üzerine diyaloglar I
 yöneylem araştırması Nedensellik üzerine diyaloglar I i Yayın No : 3197 Eğitim Dizisi : 149 1. Baskı Ocak 2015 İSTANBUL ISBN 978-605 - 333-225 1 Copyright Bu kitabın bu basısı için Türkiye deki yayın hakları
yöneylem araştırması Nedensellik üzerine diyaloglar I i Yayın No : 3197 Eğitim Dizisi : 149 1. Baskı Ocak 2015 İSTANBUL ISBN 978-605 - 333-225 1 Copyright Bu kitabın bu basısı için Türkiye deki yayın hakları
GENETİK ALGORİTMALARA GİRİŞ (I)
") Bu notlar D. Coley ve S. Haupt ın Kitaplarından Yararlanarak Hazırlanmıştır. GENETİK ALGORİTMALARA GİRİŞ (I) Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr
Bu notlar D. Coley ve S. Haupt ın Kitaplarından Yararlanarak Hazırlanmıştır. GENETİK ALGORİTMALARA GİRİŞ (I) Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr
Lineer Programlama. Doğrusal terimi, hem amaç hem de kısıtları temsil eden matematiksel fonksiyonların doğrusal olduğunu gösterir.
 LİNEER PROGRAMLAMA Giriş Uygulamada karşılaşılan birçok optimizasyon problemi kısıtlar içerir. Yani optimizasyon probleminde amaç fonksiyonuna ilave olarak çözümü kısıtlayıcı ek denklemler mevcuttur. Bu
LİNEER PROGRAMLAMA Giriş Uygulamada karşılaşılan birçok optimizasyon problemi kısıtlar içerir. Yani optimizasyon probleminde amaç fonksiyonuna ilave olarak çözümü kısıtlayıcı ek denklemler mevcuttur. Bu
Ev Tipi Yenilenebilir Hibrit Sistem İçin Mikro-Genetik Algoritma ile Optimal Yük Planlaması
 Ev Tipi Yenilenebilir Hibrit Sistem İçin Mikro-Genetik Algoritma ile Optimal Yük Planlaması Özay CAN, Nedim TUTKUN Düzce Üniversitesi Elektrik/Elektronik Mühendisliği Kapsam Giriş Hibrit Sistem ve Güç
Ev Tipi Yenilenebilir Hibrit Sistem İçin Mikro-Genetik Algoritma ile Optimal Yük Planlaması Özay CAN, Nedim TUTKUN Düzce Üniversitesi Elektrik/Elektronik Mühendisliği Kapsam Giriş Hibrit Sistem ve Güç
GridAE: Yapay Evrim Uygulamaları için Grid Tabanlı bir Altyapı
 GridAE: Yapay Evrim Uygulamaları için Grid Tabanlı bir Altyapı Erol Şahin Bilgisayar Mühendisliği Bölümü, Orta Doğu Teknik Üniversitesi Ankara, Türkiye 2. ULUSAL GRİD ÇALIŞTAYI, 1-2 Mart 2007, TÜBİTAK,
GridAE: Yapay Evrim Uygulamaları için Grid Tabanlı bir Altyapı Erol Şahin Bilgisayar Mühendisliği Bölümü, Orta Doğu Teknik Üniversitesi Ankara, Türkiye 2. ULUSAL GRİD ÇALIŞTAYI, 1-2 Mart 2007, TÜBİTAK,
Makine Öğrenmesi 2. hafta
 Makine Öğrenmesi 2. hafta Uzaklığa dayalı gruplandırma K-means kümeleme K-NN sınıflayıcı 1 Uzaklığa dayalı gruplandırma Makine öğrenmesinde amaç birbirine en çok benzeyen veri noktalarını aynı grup içerisinde
Makine Öğrenmesi 2. hafta Uzaklığa dayalı gruplandırma K-means kümeleme K-NN sınıflayıcı 1 Uzaklığa dayalı gruplandırma Makine öğrenmesinde amaç birbirine en çok benzeyen veri noktalarını aynı grup içerisinde
Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım. Mehmet Ali Aytekin Tahir Emre Kalaycı
 Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım Mehmet Ali Aytekin Tahir Emre Kalaycı Gündem Gezgin Satıcı Problemi GSP'yi Çözen Algoritmalar Genetik Algoritmalar
Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım Mehmet Ali Aytekin Tahir Emre Kalaycı Gündem Gezgin Satıcı Problemi GSP'yi Çözen Algoritmalar Genetik Algoritmalar
BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1. Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı
 BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1 Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı Mart 2015 0 SORU 1) Bulanık Küme nedir? Bulanık Kümenin (fuzzy
BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1 Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı Mart 2015 0 SORU 1) Bulanık Küme nedir? Bulanık Kümenin (fuzzy
EM302 Yöneylem Araştırması 2. Dr. Özgür Kabak
 EM302 Yöneylem Araştırması 2 Dr. Özgür Kabak TP Çözümü TP problemlerinin çözümü için başlıca iki yaklaşım vardır kesme düzlemleri (cutting planes) dal sınır (branch and bound) tüm yaklaşımlar tekrarlı
EM302 Yöneylem Araştırması 2 Dr. Özgür Kabak TP Çözümü TP problemlerinin çözümü için başlıca iki yaklaşım vardır kesme düzlemleri (cutting planes) dal sınır (branch and bound) tüm yaklaşımlar tekrarlı
3.2. DP Modellerinin Simpleks Yöntem ile Çözümü Primal Simpleks Yöntem
 3.2. DP Modellerinin Simpleks Yöntem ile Çözümü 3.2.1. Primal Simpleks Yöntem Grafik çözüm yönteminde gördüğümüz gibi optimal çözüm noktası, her zaman uygun çözüm alanının bir köşe noktası ya da uç noktası
3.2. DP Modellerinin Simpleks Yöntem ile Çözümü 3.2.1. Primal Simpleks Yöntem Grafik çözüm yönteminde gördüğümüz gibi optimal çözüm noktası, her zaman uygun çözüm alanının bir köşe noktası ya da uç noktası
VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Kümeleme İşlemleri Kümeleme Tanımı Kümeleme Uygulamaları Kümeleme Yöntemleri Kümeleme (Clustering) Kümeleme birbirine
VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Kümeleme İşlemleri Kümeleme Tanımı Kümeleme Uygulamaları Kümeleme Yöntemleri Kümeleme (Clustering) Kümeleme birbirine
Okut. Yüksel YURTAY. İletişim : (264) Sayısal Analiz. Giriş.
 Sayısal Analiz. Giriş.") Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
BÖLÜM III: Şebeke Modelleri. Şebeke Kavramları. Şebeke Kavramları. Şebeke Kavramları. Yönlü Şebeke (Directed Network) Dal / ok
 Dal / ok") 8.0.0 Şebeke Kavramları BÖLÜM III: Şebeke Modelleri Şebeke (Network) Sonlu sayıdaki düğümler kümesiyle, bunlarla bağlantılı oklar (veya dallar) kümesinin oluşturduğu yapı şeklinde tanımlanabilir ve (N,A)
8.0.0 Şebeke Kavramları BÖLÜM III: Şebeke Modelleri Şebeke (Network) Sonlu sayıdaki düğümler kümesiyle, bunlarla bağlantılı oklar (veya dallar) kümesinin oluşturduğu yapı şeklinde tanımlanabilir ve (N,A)
Karınca Koloni Algoritması 1
 Yrd. Doç. Dr. İbrahim KÜÇÜKKOÇ Web: http://ikucukkoc.baun.edu.tr Karınca Koloni Algoritması 1 6 Ders Planı (Vize Sonrası) 11. Hafta (H7312): Sürü Zekası, Doğada Karıncalar, ACO Giriş 12. Hafta (H7312):
Yrd. Doç. Dr. İbrahim KÜÇÜKKOÇ Web: http://ikucukkoc.baun.edu.tr Karınca Koloni Algoritması 1 6 Ders Planı (Vize Sonrası) 11. Hafta (H7312): Sürü Zekası, Doğada Karıncalar, ACO Giriş 12. Hafta (H7312):
Modelleme bir sanattan çok bir Bilim olarak tanımlanabilir. Bir model kurucu için en önemli karar model seçiminde ilişkileri belirlemektir.
 MODELLEME MODELLEME Matematik modelleme yaklaşımı sistemlerin daha iyi anlaşılması, analiz edilmesi ve tasarımının etkin ve ekonomik bir yoludur. Modelleme karmaşık parametrelerin belirlenmesi için iyi
MODELLEME MODELLEME Matematik modelleme yaklaşımı sistemlerin daha iyi anlaşılması, analiz edilmesi ve tasarımının etkin ve ekonomik bir yoludur. Modelleme karmaşık parametrelerin belirlenmesi için iyi
Fonksiyon Optimizasyonunda Genetik Algoritmalar
 01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
HESSİEN MATRİS QUADRATİK FORM MUTLAK ve BÖLGESEL MAKS-MİN NOKTALAR
 HESSİEN MATRİS QUADRATİK FORM MUTLAK ve BÖLGESEL MAKS-MİN NOKTALAR Kısıtlı ve kısıtsız fonksiyonlar için maksimum veya minimum (ekstremum) noktalarının belirlenmesinde diferansiyel hesabı kullanarak çeşitli
HESSİEN MATRİS QUADRATİK FORM MUTLAK ve BÖLGESEL MAKS-MİN NOKTALAR Kısıtlı ve kısıtsız fonksiyonlar için maksimum veya minimum (ekstremum) noktalarının belirlenmesinde diferansiyel hesabı kullanarak çeşitli
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Doğrusal Ara Değer Hesabı Lagrance Polinom İnterpolasyonu
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Doğrusal Ara Değer Hesabı Lagrance Polinom İnterpolasyonu
KAHRAMANMARAŞ SÜTÇÜ İMAM ÜNİVERSİTESİ EĞİTİM ÖĞRETİM YILI FEN-EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ BİRİNCİ VE İKİNCİ ÖĞRETİM DERSLERİ
 I. YARIYIL Adı Teori Uygulama KSU MT101 Analiz I 6 4 2 5 7 MT107 Soyut Matematik I 4 4 0 4 5 MT109 Analitik Geometri I 4 4 0 4 5 FZ173 Fizik I 4 4 0 4 4 OZ101 Türk Dili I 2 2 0 2 2 OZ121 Ingilizce I 2
I. YARIYIL Adı Teori Uygulama KSU MT101 Analiz I 6 4 2 5 7 MT107 Soyut Matematik I 4 4 0 4 5 MT109 Analitik Geometri I 4 4 0 4 5 FZ173 Fizik I 4 4 0 4 4 OZ101 Türk Dili I 2 2 0 2 2 OZ121 Ingilizce I 2
GÜZ DÖNEMİ ARASINAV SORULARI. 1. Sayısal çözümleme ve fonksiyonu tanımlayarak kullanıldığı alanları kısaca açıklayınız?
 MAK 05 SAYISAL ÇÖZÜMLEME S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ K F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A şubesi B
MAK 05 SAYISAL ÇÖZÜMLEME S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ K F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A şubesi B
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret