Genel Bilgiler. Giriş Titreşimlerin Sebepleri Titreşimlerin Sonuçları Sistemlerin Titreşim Analizi Titreşim ve İnsan
|
|
|
- Gül Ersoy
- 7 yıl önce
- İzleme sayısı:
Transkript
1 Kaynaklar: Makina Dinamiği Yıldız Teknik Üniversitesi Yayını, Prof.Necati Tahralı Prof.Dr.Faris Kaya Y.Doç.Dr.İsmail Yüksek Y.Doç.Dr.Rahmi Güçlü. Mekanik Titreşimler Ders Notları, Prof.Dr.Özgür Turhan. Mekanik Titreşimler Birsen Kitabevi Yayınları, Prof.Dr.Tuncer Toprak. Vibration Engineering West Publishing Co., Andrew D. Dimarogonas. Theory Of Vibration With Application Chapman &Hall, William T. Thomson. 1
2 Genel Bilgiler Giriş Titreşimlerin Sebepleri Titreşimlerin Sonuçları Sistemlerin Titreşim Analizi Titreşim ve İnsan
3 Titreşimle İlgili Terimler Titreşim nedir? Bir sistemin denge konumu civarında yapmış olduğu salınım hareketine titreşim denir. Eğer yapılan salınım hareketi T saniyede kendini tekrar ediyorsa böyle hareketlere peryodik hareket denir. En basit peryodik hareket harmonik hareket adını alır. x(t)=x(t+nt) x=yerdeğiştirme m, rad t=zaman s T=Peryod s n=peryod sayısı adet 3
4 Titreşim Sistemlerinin Elemanları Kütle x Yay Sönüm Kuvvet x 4
5 Serbestlik Derecesi Hareket halindeki bir sistemin elemanlarının durum ve konumlarını belirleyen parametrelere koordinat denir. Bir sistemin bütün parçalarının her hangi bir zamanda konumlarının tamamen belirli olması için gerekli birbirinden bağımsız minimum koordinat sayısına serbestlik derecesi denir. 5
6 Tek Serbestlik Dereceli Sistemler x x θ x θ 6
7 İki Serbestlik Dereceli Sistemler x θ 1 x 1 θ θ x θ θ 1 7
8 Ayrık ve Sürekli Sistemler Sonlu sayıda serbestlik dereceli sistemlere ayrık sistem denir. Serbestlik derecesi sonsuz olan sistemlere sürekli sistem denir. Sürekli sistem 8
9 SI Birim Sistemi İsim Birim Sembol Uzunluk Metre m Kütle Kilogram kg Zaman Saniye s Kuvvet Newton N (kg.m/s ) Gerilme Pascal Pa (N/m ) İş Joule J (N.m) Güç Watt W (J/s) Frekans Hertz Hz (1/s) Moment M N.m Kütlesel Atalet Momenti J kg.m Kesit Atalet Momenti I m 4 9
10 Harmonik Hareket x=yerdeğiştirme (m,rad) A=Genlik (m,rad) t=zaman (s) T=Peryot (s) t x=a sin π T x A t T 10
11 Daire Üzerinde Hareketli Bir Noktanın Harmonik Gösterimi O A P x π A Asin ωt ωt π ω= = π f T x=a sin ωt x=ω A cos ωt=ω A sin(ωt-π/) x=-ω Asinωt=ω Asin(ωt+π) 11
12 Harmonik Harekette Yerdeğiştirme Hız ve İvme Vektörlerinin Gösterimi Aω x x Aω A t ωt x x 1
13 Euler Denklemi Yardımı ile Döner Bir Vektörün Gösterimi Euler Denklemi i θ e =cosθ +i sin θ z=a e i ω t =A e i θ z=a cos ωt + i A sin ωt z=x + iy θ=ω t A= x +y θ=tan -1 y x A θ i ω t z=a e 13
14 Vuru Titreşim Parametreleri ω m=ω1-ω ω 1+ω ω= π T m = ω -ω 1 vuru frekansı veya modülasyon frekansı taşıyıcı frekans vuru peryodu 4π T= ω +ω taşıyıcı peryodu 1 Tm ω 1+ω n = T (ω -ω ) 1 T m vuru peryodunda gerçekleşecek titreşim sayısı 14
; x=50*exp(i*.")
15 Vuru Olayı x T m T X ~ (t) x(t) x(t)=100 e 1 x (t)=50 e x(t)=? i π t i.π t X 1 +X X 1 +X X 1 -X X 1 -X t clear t=0:0.01:30; x1=100*exp(i**pi*t); x=50*exp(i*.*pi*t); x=x1+x; plot(t,x) 15

16 Yay Elemanları Helisel Yaylar 16

17 Yaprak Yaylar 17
18 Yay Karakteristikleri F (N) F (N) α Lineer (doğrusal) yay karakteristiği X (m) X (m) Non-Lineer (doğrusal olmayan) yay karakteristiği 18
19 Yay Katsayısı Kuvvet F k=tan α= (N/m) x Yerdeğiştirme 19

20 Yay Katsayısı Tablosu E I k= L E A k= L G I p k= L 4 G d k= 64 n R 3 3EI k= L 3 0
21 k= 48 E I L 3 L/ 19 E I k= 3 L L/ 768 E I k= 7 L 3 L/ 1
22 x a b 3 E I L P b x ab 6 E I L k= y y x = ( L -x -b ) δ EI L 1E I k= L 3
23 3E I k= L+a a ( ) L a 4E I k= a 3L+8 a ( ) L a 3
24 Yayların Paralel Bağlanması m x k 1 k m k eş x k =k +k +k +...+k = eş 1 3 n n i=1 n k 4
25 Yayların Seri Bağlanması m x m x k 1 k eş k n = = k k k k k k eş 1 3 n i=1 i 5
26 ÖDEV 6: k 1 k m x Yandaki sistemin eşdeğer yay katsayısını hesaplayınız. k 3 k 4 6
27 ÖDEV 7: k ç1 k ç k 1 Yandaki sistemin eşdeğer yay katsayısını hesaplayınız. k m x 7
28 Sönüm Elemanları Viskoz sönüm Coulumb (kuru sürtünme) sönümü Malzeme (histeresiz) sönüm Sıkıştırılmış yağ (squeeze-film) damperi Elekro-manyetik damper Elektro-viskoz damper Piezo-elektrik damper 8
29 Sönümsüz Serbest Titreşim Düşey konumda kütle-yay sisteminin hareket denklemi: L 0 k k δ st k x t x Statik denge konumu 9
30 k δ st Serbest cisim diyagramı G= m.g Statik denge konumu: Burada, ωn ΣF y =0 sistemin tabii frekansıdır. G=m.g=k.δ k g = =ω m δ st k ω n = = m n st g δ st 30
31 Newton un. kanunu uygularsak, k( δ st + x) x m x G= m.g ( δ ) Σ F = m.a m x = -k + x + G st G=m.g=k.δst olduğundan, m x+k x=0 bulunur. 31
32 Yatay konumda kütle-yay sisteminin hareket denklemi: x x k m k x m m x Newton un. kanunu uygularsak, ΣF=m.a m x = -k x m x + k x = 0 bulunur. 3
33 Sönümsüz Serbest Titreşim Hareket Denkleminin Bulunması m x + k x = 0 Bu diferansiyel denklemin çözümünün x = A e s t biçiminde olduğunu biliyoruz. Burada, A ve s integrasyon sabitleridir. Çözüm kabulünü türetirsek, x = x= s A e s A e s t s t Bulunur. Bunlar yukarıdaki diferansiyel denklemde yerine konursa, 33
34 ( ) st m s + k A e = 0 Burada, s t A, e 0 dır. m s + k = 0 Bulunur, bu denkleme karakteristik denklem denir. Karakteristik denklemin kökleri, s k = = m i ω 1, n dir. 34
35 Bu durumda, hareket denklemi: x(t) = Ae + Ae = Ae + Ae st 1 st iωnt iωnt 1 1 A 1 ve A başlangıç şartlarından bulunacak katsayılardır. iθt e = cos θ.t i.sin θ.t eşitliği kullanılırsa, ( ω ω ) ( ω ω ) x(t) = A cos t i sin t + A cos t + i sin t 1 n n n n ( ) ω ( ) x(t) = A + A cos t i A A sin ω t 1 n 1 n = ( + ) ve B ( A A ) B A A 1 1 = olmak üzere, 1 35
36 x(t)=b1cos ωnt+bsin ωnt olur. Başlangıç şartları Bu durumda, x(0) = x t= 0 = B=x 1 0, 0 olsun. x(0) x 0 x B= ω 0 n bulunur. Buradan başlangıç şartlarına bağlı hareket denklemi aşağıdaki şekilde bulunur. x(t)=x cos ω t+ x sin ω t 0 0 n n ωn 36
37 Problem: Aşağıdaki sarkacın diferansiyel denklemini çıkarınız. Tabii frekansını ve periyodunu hesaplayınız. L uzunluğunda ağırlıksız bir ipin ucuna m kütlesi asılmıştır. Çözüm: ϕ L J ϕ m g 37
38 Newton un. kanunu uygulanırsa, Σ M= JTopϕ J ϕ = -m g.l sin ϕ J = m L 0 sin ϕ<< ϕ ϕalınabilir. m L ϕ + m g L ϕ= 0 ϕ + ϕ= 0buradan, L ω = k g n m = π 1 L rad/s T = = s ω f g n n 38
39 Problem: Aşağıda denge konumunda verilen sistemin diferansiyel denklemini çıkarıp tabii frekansını hesaplayınız. m,l M k 39
40 Çözüm: Sistemin denge konumunu bir miktar bozalım ve oluşan kuvvetleri gösterelim. ϕ Jmϕ m.g k.x JMϕ M.g 40
41 Newton un. kanunu uygulanırsa, Σ M= JTopϕ L Jmϕ + JMϕ = m g. sin ϕ-m g.l sin ϕ-k x.l cos ϕ ϕ<< 0 sin ϕ ϕ cos ϕ 1alınabilir. Yaydaki sıkışma miktarı x= L.sin ϕ= L ϕ m L + M L ϕ+ m g.l+ M g.l+ k L ϕ= 0 41
42 1 Jm = m L, JM = M L dir. 3 sadeleştirme yapılırsa, 1 1 m + M L ϕ+ m g+ M g+ k L ϕ= 0 3 ω n 1 k m g + M g + k L = = m 1 m+ M L 3 4
43 Problem: Aşağıda denge konumunda verilen sistemin diferansiyel denklemini çıkarıp tabii frekansını hesaplayınız m,r k M x 43
44 Çözüm: Jmϕ ϕ k x M x M x 44
45 Newton un. kanunu uygulanırsa, Σ M= JTopϕ J ϕ + M x.r = -k x.r m ϕ<< 0 sin ϕ ϕ cos ϕ 1 J m = 1 m r x= r.sin ϕ= r x = r x= r ϕ ϕ ϕ yazılabilir. 45
46 düzenleme yapılırsa, 1 m r ϕ + M x.r = -k x.r 1 m r M r k r + ϕ + ϕ= 0 1 m + M ϕ + k ϕ= 0 k k k ω n = = = m 1 m+ M m+ M rad/s 46
47 Lineerleştirme Yapısal nonlineerlik (Malzeme nonlineerliği) Geometrik nonlineerlik -Ağırlık kuvveti - Merkezkaç kuvveti - Sürtünme kuvveti 47
48 Tek serbestlik dereceli bir sistemin diferansiyel denklemi aşağıdaki gibidir. m x+ f( x) = 0 Burada f( x) yay fonksiyonudur. f( x) lineer olmayan bir formda ortaya çıkmış olsun. Koordinat başlangıcını, x= 0 denge konumunda seçelim, yani; f( 0) = 0 ( ) f x x= 0 olsun bu durumda fonksiyonunu civarında kuvvet serisine açalım. 3 k ( ) 1 ( ) 1 ( ) 1 ( ) df 0 d f 0 d f 0 d f 0 f ( x) = f( 0) + x+ x + x + = x dx! dx 3! dx k! dx 3 k 3 k k= 0 48
49 f(x) 3 x << x, x ihmal edilirse; Elde edilen lineerleştirilmiş yay fonksiyonu dif. denklemde yerine konulursa, lineerleştirilmiş dif. denklem elde edilir. 0 1 k = df ( 0) dx x ( ) f x m x + k x = 0 k x ( ) f x k df ( 0) ( ) df 0 dx x olur. = eşitliğinden. f( x) dx k x bulunur. 49
50 Problem: Aşağıda denge konumunda verilen sistemin diferansiyel denklemini çıkarıp tabii frekansını hesaplayınız y m 1 L 1 L m x k 50
51 Çözüm: y ϕ Lsinϕ 1 m 1 g J1ϕ Jϕ ϕ L cosϕ L sinϕ x k L sinϕ 51
52 Newton un. kanunu uygulanırsa, Σ M= J α T J ϕ + J ϕ = m g L sinϕ-k L sin ϕ L cosϕ ( ) ( ) m L + m L ϕ+ k L cosϕ m g L sinϕ= Burada, ( ) ( = ) f ϕ k L cosϕ m g L sinϕ 1 1 dir. f(x) fonksiyonunu lineerleştirmek amacıyla seriye açarsak ( ϕ) df k = = k L sin ϕ+ ( k L cosϕ m g L ) cos ϕ d 1 1 ϕ ϕ= 0 ϕ= 0 k= k L mg L 1 1 5
53 Küçük titreşimler için lineerleştirilmiş diferansiyel denklem aşağıdaki gibi elde edilir. ( ) ( ϕ ) ml + ml + k L mg L ϕ= ω k k L mg L 1 1 n = = m m1l1+ ml rad/s 53
54 Sönümlü Serbest Titreşim Hareket Denkleminin Bulunması m x + c x + k x = 0 Bu diferansiyel denklemin çözümünün x = A e s t biçiminde olduğunu biliyoruz. Burada, A ve s integrasyon sabitleridir. Çözüm kabulünü türetirsek, x = x= s A e s A e s t s t Bulunur. Bunlar yukarıdaki diferansiyel denklemde yerine konurda, 54
55 ( ) st m s + c s + k A e = 0 Burada, s t A, e 0 dır. m s + c s + k = 0 s Bulunur, bu denkleme karakteristik denklem denir. Karakteristik denklemin kökleri, 1, dir. c c 4mk c c k ± = = ± m m m m 55
56 Sistemin birbirinden bağımsız iki gerçek kökü vardır. Bu durumda, hareket denklemi: x(t) = A e + A e st 1 s t 1 A 1 ve A başlangıç şartlarından bulunacak katsayılardır. 56
57 Kritik Sönüm Katsayısı ve Sönüm Oranı Kritik sönüm katsayısı c kr aşağıdaki gibi tanımlanır. c kr k = m m 0 k ckr = m = k m = mω m n Sönüm oranı ise, ξ = c c kr olarak tanımlanır. 57
58 Eğer karakteristik denklem, m s + c s+ k = 0 ξ ve ω n cinsinden yazılırsa, c k s + s + = 0 s + ξωns + ωn = 0 m m ξω n ω n denklemin kökleri aşağıdaki gibi bulunur. ( ) ( + ) ( ) n ξ ξ 1 ω t ξ ξ 1 ω t x t = A e + A e 1 n 58
59 1.Durum: Zayıf Sönümlü Sistem c ξ < 1, c kr > c, < m ( ξ 1) Kritik altı sönümlü sistemlerde negatif olur. Bu durumda, ( ) s = + ξ i 1 ξ ω 1 n ( ) s = ξ i 1 ξ ω n olur. Sistemin bir çift eşlenik kompleks kökü olduğundan, () k m ( + ) ( ) n ξ i 1 ξ ω t ξ i 1 ξ ω t x t = A e + A e 1 n () ( ) ξωt i 1 ξ ω t i 1 ξ ω t = 1 + n n x t e A e A e n 59
60 = + + ( A ) cos 1 ξωnt i sin 1-ξωnt ξωt () ( ) 1 ξωn ξωn n x t e A cos 1 t i sin 1- t ξωnt x() t = e ( A1+ A ) cos 1-ξωnt+ i ( A1 A ) sin 1- ξ ωnt B1 B - ξωt () ( = ξω ) n + φ n x t X e sin 1 t () = ξω - ξωnt x t X e cos 1 ( t φ ) n 60
61 = B = tan B1 X B B φ Başlangıç şartları, olarak yazılabilir. x = x t= 0 0 x = x ise, t= 0 0 B B 1 0 = = x x + ξωx 0 n 0 ω n 1 ξ olarak bulunur. Bu durumda, x( t) 61
62 x x x t e + ξω x cos 1 t sin 1 t ωn 1 ξ ξω () ( ) ( ) n = t 0 n 0 0 ξωn + ξωn ω d = 1 dir. ξ ωn x x x t e + ξω x0cos dt sin dt ωn 1 ξ ξωn () t 0 n 0 = ( ω ) + ( ω ) olarak bulunur. 6
63 x() t α = 1 tan x 0 π Td = ω d X X e ξω n t x 0 t φ sin ( ω t + φ) d X e ξω n t 63
64 .Durum: Kritik Sönümlü Sistem Katlı kök olduğundan, c k ξ = 1, ckr = c, = m m ckr s = s = = ω m 1 n m x+ c x + k x = 0 denklemin çözümü: ( ) ( ) n x t A A t e ω - t = 1+ formunda olacaktır. Başlangıç şartları, A = x 1 0 A = x + ω x 0 n 0 x = x t= 0 0 x = x ise, t= 0 0 olarak bulunur ve çözüm: 64
65 n ( ) = + ( + ω ) x t x0 x0 nx 0 e ω bulunur. Dikkat edilirse, x( t) x > 0 0 x = t -ωnt t e 0 x < 0 0 t 65
66 3.Durum: Aşırı Sönümlü Sistem c ξ > > > m x+ c x + k x = 0 1, c c kr, m m Diferansiyel denkleminin karakteristik denklemi, m s + cs+ k = 0 in kökleri: ( ) s = ± ξ ξ 1 ω dir. 1, n ξ> 1 ξ 1 > 0 eğer, olur. Bu durumda, kökler reel ve ayrık olacaktır. Denklemin çözümü: ( ) ( ) ( + ) n ξ ξ 1 ω t ξ ξ 1 ω t x t = A e + A e 1 k n 66
67 Başlangıç şartları, x = x t= 0 0 x = x ise, t= 0 0 A A 1 = = ( ) x ω ξ+ ξ 1 + x 0 n 0 ω ξ n 1 ( ) x ω ξ ξ 1 x 0 n 0 ωn ξ 1 67
68 () x t A 1 1 ( + ) 1 t A e ξ ξ ω n t ( ) 1 t A e ξ ξ ω n A 68
69 Logaritmik Azalma x() t x 1 x t 69
70 Problem: Aşağıda denge konumundaki sistemin verilen değer ve başlangıç şartlarına bağlı olarak 5 s için hareketini inceleyiniz. M,L c k m 70
71 Çözüm: Mg kx JMϕ y ϕ c y Jmϕ x= L ϕ x = L ϕ x= Lϕ L L L y = ϕ y = ϕ y= ϕ 1 J = ML 3 x mg 71
72 Newton un. kanunu uygulanırsa, M= Jϕ L Jmϕ + JMϕ = cy kx L mg x Mg y 1 L L ml + ML ϕ+ c ϕ+ kl + mgl + Mg ϕ= ϕ + 5ϕ ϕ= 0 7
73 3 m = 10 kg M = 6 kg L = 1 m c = 5 Ns/m k = 1 10 N/m 10π x0 = ϕ0 = rad 180 t= 0 5π x0 = ϕ0 = rad/s
74 c c 5 ξ = = = = c km ω n kr k 1000 = = = π rad/s m 1 ωd = ωn 1 ξ = π π ξω ϕ ξ ω ϕ ϕ + ϕ ω ω () t = e nt cos( t) + 0 n 0 sin( t) 0 d d ωn 1 ξ { } 0.055t ( t) = e cos( t) sin( t) ϕ π π 74
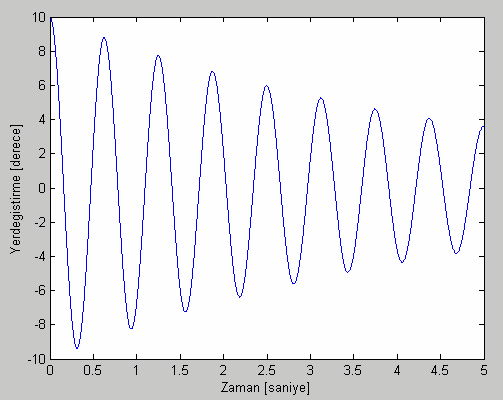
75 75
76 Sönümsüz Zorlanmış Titreşim Zorlayıcı kuvvet tipleri: Zorlayıcı dış kuvvetler. Dengelenmemiş kütlelerin oluşturduğu kuvvetler. Zeminden gelen kuvvetler. ( ) Eğer, zorlayıcı kuvvet harmonik ise; ( ωt+ φ) ( ) ( ω φ) ( ) ( ω φ) F t = F e, F t = F cos t +, F t = F sin t + i formunda olabilir. 76
77 Hareketin diferansiyel denkleminin bulunması: ( ω ) F= F cos t 0 m x m x m ( ω ) F= F cos t 0 k k x Newton un. kanununa göre, Σ F = m a m x = k x + F m x + k x = F 77
78 Sönümsüz Zorlanmış Titreşim Hareket Denkleminin Bulunması ( ω ) F= F cos t En genel halde harmonik bir dış kuvvet olsun. Hareketin diferansiyel denklemi: 0 ( ω ) mx + kx = F cos t Hareket denkleminin genel çözümü: Homojen çözüm: ( ) = ( ) = ( ) + ( ) x t x t x t x t g h ö ( ) = ( ω ) + ( ω ) x t A cos t A sin t h 1 n n Ft ( ) x () t ω Uyarıcı kuvvet harmonik olduğu için özel çözüm de ö harmonik ve aynı frekansına sahip olacaktır. x t Xcos t ö ( ) = ( ω )
79 ö ö ö ( ) = ( ω ) x t Xcos t () = ω ( ω ) x t Xsin t ( ) = ω ( ω ) x t Xcos t 5 1 in içine konulursa; ( ) ( ) ( ) mω Xcos ωt kcos ωt F0 cos ωt + = F k m X cos t = F cos t X = k-m ω ( ω ) ( ω ) ( ω ) Genel çözüm: 6 F0 x() t = A1cos( ωnt) + Asin( ωnt) + cos ( ωt) 7 k mω 79
80 Başlangıç şartları, A A F = x k mω x0 = ω n x = x t= 0 0 x = x ise, t= 0 0 olarak bulunur ve genel çözüm: F x F x t x cos t sin t cos t () = ( ω ) + ( ω ) + ( ω ) 0 n n k mω ωn k mω 80
81 X in ω ile değişimi ω n F0 F0 F0 F0 X k 1 X = X = k = k = k = k mω m 1- ω ω F0 1 ω ω k k 1 1 ω n ω n m ω n R = X k F 0 Genlik oranı veya büyütme faktörü. 81
82 0< ω < 1 ω 1.Durum: ise; n ( ) = ( ω ) Ft Fcos t 0 ωt xö ( t ) =Xcos( ωt) ωt 8
83 ω 1 ω >.Durum: ise; n ( ) = ( ω ) Ft Fcos t 0 ωt x t Xcos t ö ( ) = ( ω ) ωt 83
84 ω 1 ω = 3.Durum: ise; n ( ) = ( ω ) Ft Fcos t 0 t xt ( ) t 84
85 Problem: Aşağıda denge konumundaki sistemin verilen değer ve başlangıç şartlarına bağlı olarak s için hareketini inceleyiniz. m,e,ω m cubuk, L M x k 85
86 Çözüm: x = L ϕ x = L ϕ x = Lϕ 1 J= mcubukl 3 Jϕ ϕ F= me ω cosωt kx F 0 x M x 86
87 Newton un. kanunu uygulanırsa, M= Jϕ Jϕ + Mx L= kx L+ F L + + = 3 1 m cubuk L ML ϕ kl ϕ me ω Lcos ω t 87
88 m = 30 kg M = 300 kg m = 0.5 kg cubuk 3 e 1 m n 000 d/d L m k N/m = = = = 5π x0 = ϕ0 = 180 t= 0 8π x0 = ϕ0 =
89 ω πn π000 = = = π rad/s 140ϕ ϕ= cos 66.66πt M 0 k ωn = = = 4.04 π rad/s m 140 M ϕ M ϕ ϕ ω ω ω () t = cos( t) + sin( t) + cos( t) 0 n n k mω ωn k mω () ( ) ( ) ( ) - ϕ t = cos 4.04πt sin 4.04πt cos 66.66πt 89
90 Problem: Aşağıdaki sistemin titreşim hareketini 4 s için çiziniz. F = 500sin0πt F1 = 100cos 0πt m x k 90
91 Çözüm: F = 500sin0πt m F1 = 100cos 0πt x m x kx 91
92 Newton un. kanunu uygulanırsa, F= ma mx = kx + F + F 1 mx + kx = F + F 1 10x x = 100cos 0πt + 500sin 0πt 500 φ= φ= tan = + = F N ( π ) 10x x = 773cos 0 t
93 m = 10 kg k = 5000 N/m x0 = t= 0 x 0 = 0.01 m 0. m/s k 5000 ωn = = = 4.59 π rad/s ω= 0π m 10 F x F x t x cos t sin t cos t () = ( ω ) + ( ω ) + ( ω φ) 0 n n k mω ωn k mω ( ) = ( π ) + ( π ) ( π ) x t 0.016cos 4.59 t sin 4.59 t 0.006cos 0 t
94 Sönümlü Zorlanmış Titreşim Hareketin diferansiyel denkleminin bulunması: ( ω ) F= F cos t 0 m x m x m ( ω ) F= F cos t 0 k c k x c x Newton un. kanununa göre, Σ F = m a m x = -c x-k x + F m x + c x + k x = F 94
95 Sönümlü Zorlanmış Titreşim Hareket Denkleminin Bulunması ( ω ) F= F cos t En genel halde harmonik bir dış kuvvet olsun. Hareketin diferansiyel denklemi: Hareket denkleminin genel çözümü: Homojen çözüm: ( ω ) mx + cx + kx = F cos t ( ) = ( ) = ( ) + ( ) x t x t x t x t g h ö ( ) = ( ω ) + ( ω ) x t A cos t A sin t h 1 n n Ft ( ) x () t ω Uyarıcı kuvvet harmonik olduğu için özel çözüm de ö harmonik ve aynı frekansına sahip olacaktır. ( ) = ( ω φ) x t Xcos t ö
96 ö ö ö () = ( ω φ) x t Xcos t () = ω ( ω φ) x t Xsin t () = ω ( ω φ) x t Xcos t 5 1 in içine konulursa; Aşağıdaki trigonometrik bağıntılar kullanılarak; 5 ( ) ( ) ( ) ( ) + = mω Xcos ωt φ cωxsin ωt φ k cos ωt φ F0 cos ωt ( k mω ) cos( ωt φ) cωsin( ωt φ) X= F cos( ωt) ( ) cos ωt φ = cosωt cosφ± sin ωt sinφ ( ) sin ωt φ = sin ωt cosφ cosωt sinφ
97 7 nolu eşitlik 6 denklemine konulursa; ( ) ( ) ( ) X k m ω cosωt cosφ sin ωt sinφ cω sin ωt cosφ cosωt sinφ + = F0 cosωt cosωt sinωt ve nin katsayılarını eşitlersek; ( ) X k mω cosφ cωsinφ + = F X ( k mω ) sinφ cωcosφ = 0 Bu iki denklemin karelerini alalım: X ( k mω ) cos φ ( cω) sin φ ( k m ω ) cωcosφsinφ + + = F X ( k mω ) sin φ ( cω) cos φ ( k m ω ) cωcosφsinφ = 0 0 ve taraf tarafa toplayalım;
98 X ( k mω ) ( cω ) F X 0 + = 0 = 9 nolu denklemden; = 0 F ( k mω ) + ( cω) c X ω ( k mω ) sinφ cωcosφ 0 φ tan -1 = = k mω 11 1 Genel çözüm: 13 F = ω + ω + ω φ ( ) ( ) ( ) 0 xt Acos 1 nt Asin nt cos t ( k mω ) + ( cω) ( ) 98
SÖNÜMLÜ SERBEST TİTREŞİMLER
 SÖNÜMLÜ SERBEST TİTREŞİMLER 79 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80 Sönümlü Serbest Titreşim
SÖNÜMLÜ SERBEST TİTREŞİMLER 79 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80 Sönümlü Serbest Titreşim
MEKANİK TİTREŞİMLER DERS NOTLARI
 SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ
 BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
Fizik 101: Ders 23 Gündem
 Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
MAKİNA TEORİSİ ÖDEV 3. A) Problemlerin Yanıtları
 Problemlerin Yanıtları") MAK3 Makina Teorisi MAKİNA TEORİSİ ÖDEV 3 A) Problemlerin Yanıtları ) Birinci soruda verilen sistem statik denge konumunda kabul edilsin. Buna göre sistem geometrisinden aşağıdaki Şekil elde edilebilir.
MAK3 Makina Teorisi MAKİNA TEORİSİ ÖDEV 3 A) Problemlerin Yanıtları ) Birinci soruda verilen sistem statik denge konumunda kabul edilsin. Buna göre sistem geometrisinden aşağıdaki Şekil elde edilebilir.
MEKANĠK TĠTREġĠMLER DENEYĠ
 MK-LB00 MEKNĠK TĠTREġĠMLER DENEYĠ. DENEYĠN MCI Mekanik titreşimler deneyi titreşim teorisi bilgilerinin daha iyi kavranmasına yardımcı olmak ve deneysel beceri kazandırmak amacıyla yapılmaktadır.. DENEY
MK-LB00 MEKNĠK TĠTREġĠMLER DENEYĠ. DENEYĠN MCI Mekanik titreşimler deneyi titreşim teorisi bilgilerinin daha iyi kavranmasına yardımcı olmak ve deneysel beceri kazandırmak amacıyla yapılmaktadır.. DENEY
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
MEKANİK TİTREŞİMLER. Doç. Dr. Mehmet İTİK
 MEKANİK TİTREŞİMLER Doç. Dr. Mehmet İTİK Mekanik Titreşimler Ders Planı Ders İçeriği: Titreşim ile ilgili temel kavramlar Mekanik sistemlerin serbest ve zorlanmış titreşimleri. Çok serbestlik dereceli
MEKANİK TİTREŞİMLER Doç. Dr. Mehmet İTİK Mekanik Titreşimler Ders Planı Ders İçeriği: Titreşim ile ilgili temel kavramlar Mekanik sistemlerin serbest ve zorlanmış titreşimleri. Çok serbestlik dereceli
T.C. SÜLEYMAN DEMĐREL ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ MAKĐNE MÜHENDĐSLĐĞĐ BÖLÜMÜ
 T.C. SÜLEYMAN DEMĐREL ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ MAKĐNE MÜHENDĐSLĐĞĐ BÖLÜMÜ MAKĐNE TEORĐSĐ VE DĐNAMĐĞĐ LABORATUARI DENEY FÖYÜ DENEY ADI MEKANĐK TĐTREŞĐM DENEYĐ DERSĐN ÖĞRETĐM ÜYESĐ Dr. Öğretim
T.C. SÜLEYMAN DEMĐREL ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ MAKĐNE MÜHENDĐSLĐĞĐ BÖLÜMÜ MAKĐNE TEORĐSĐ VE DĐNAMĐĞĐ LABORATUARI DENEY FÖYÜ DENEY ADI MEKANĐK TĐTREŞĐM DENEYĐ DERSĐN ÖĞRETĐM ÜYESĐ Dr. Öğretim
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
FİZİK 4. Ders 10: Bir Boyutlu Schrödinger Denklemi
 FİZİK 4 Ders 10: Bir Boyutlu Schrödinger Denklemi Bir Boyutlu Schrödinger Denklemi Beklenen Değer Kuyu İçindeki Parçacık Zamandan Bağımsız Schrödinger Denklemi Kare Kuyu Tünel Olayı Basit Harmonik Salınıcı
FİZİK 4 Ders 10: Bir Boyutlu Schrödinger Denklemi Bir Boyutlu Schrödinger Denklemi Beklenen Değer Kuyu İçindeki Parçacık Zamandan Bağımsız Schrödinger Denklemi Kare Kuyu Tünel Olayı Basit Harmonik Salınıcı
1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. 2) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek.
 Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. 2) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek.") DENEY 4. BASİT SARKAÇ Amaç: 1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. ) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek. Kuramsal Bili: Kendini belirli zaman
DENEY 4. BASİT SARKAÇ Amaç: 1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. ) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek. Kuramsal Bili: Kendini belirli zaman
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
BASİT HARMONİK HAREKET
 BASİT HARMONİK HAREKET Bir doğru üzerinde bulunan iki nokta arasında periyodik olarak yer değiştirme ve ivmesi değişen hareketlere basit harmonik hareket denir. Sarmal yayın ucuna bağlanmış bir cismin
BASİT HARMONİK HAREKET Bir doğru üzerinde bulunan iki nokta arasında periyodik olarak yer değiştirme ve ivmesi değişen hareketlere basit harmonik hareket denir. Sarmal yayın ucuna bağlanmış bir cismin
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
ELK-301 ELEKTRİK MAKİNALARI-1
 ELK-301 ELEKTRİK MAKİNALARI-1 KAYNAKLAR 1. Prof. Dr. Güngör BAL, Elektrik Makinaları I, Seçkin Yayınevi, Ankara 2016 2. Stephen J. Chapman, Elektrik Makinalarının Temelleri, Çağlayan Kitabevi, 2007, Çeviren:
ELK-301 ELEKTRİK MAKİNALARI-1 KAYNAKLAR 1. Prof. Dr. Güngör BAL, Elektrik Makinaları I, Seçkin Yayınevi, Ankara 2016 2. Stephen J. Chapman, Elektrik Makinalarının Temelleri, Çağlayan Kitabevi, 2007, Çeviren:
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
DİNAMİK - 1. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
KKKKK. Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I
 Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I 1. Sınav süresi 10 dakikadır.. Bu sınavda eşit puanlı 0 adet soru vardır.. Elinizdeki soru kitapçığı K türü soru kitapçığıdır.. Yanıtlarınızı Yanıt Kağıdı
Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I 1. Sınav süresi 10 dakikadır.. Bu sınavda eşit puanlı 0 adet soru vardır.. Elinizdeki soru kitapçığı K türü soru kitapçığıdır.. Yanıtlarınızı Yanıt Kağıdı
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 9 COSMOSWORKS İLE ANALİZ
 BİLGİSAYAR DESTEKLİ TASARIM HAFTA 9 COSMOSWORKS İLE ANALİZ Sunum içeriği: 1. Merkezkaç Kuvveti (Centrifugal Force) 2. Burkulma (Flambaj Analizi) 3. Doğal Frekans Analizi (Natural Frequencies) Merkezkaç
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 9 COSMOSWORKS İLE ANALİZ Sunum içeriği: 1. Merkezkaç Kuvveti (Centrifugal Force) 2. Burkulma (Flambaj Analizi) 3. Doğal Frekans Analizi (Natural Frequencies) Merkezkaç
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Sistem Dinamiği. Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Akışkanların Dinamiği
 Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
Düzgün olmayan dairesel hareket
 Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
ITAP Fizik Olimpiyat Okulu 2011 Seçme Sınavı
 ITAP Fizik Olimpiyat Okulu 11 Seçme Sınavı 1. Dikey yönde atılan bir taş hareketin son saniyesinde tüm yolun yarısını geçmektedir. Buna göre taşın uçuş süresinin en fazla olması için taşın zeminden ne
ITAP Fizik Olimpiyat Okulu 11 Seçme Sınavı 1. Dikey yönde atılan bir taş hareketin son saniyesinde tüm yolun yarısını geçmektedir. Buna göre taşın uçuş süresinin en fazla olması için taşın zeminden ne
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
MAT355 Kompleks Fonksiyonlar Teorisi I Hafta 2. yapılırsa bu durumda θ ya z nin esas argümenti denir ve Argz ile gösterilir. argz = Argz + 2nπ, n Z
 MAT355 Kompleks Fonksiyonlar Teorisi I Hafta 1.. Kutupsal Formda Gösterim z x + iy vektörünün pozitif reel eksenle yaptığı açıya θ diyelim. cos θ x, sin θ y ve buradan tan θ y θ arctan y olup θ ya z z
MAT355 Kompleks Fonksiyonlar Teorisi I Hafta 1.. Kutupsal Formda Gösterim z x + iy vektörünün pozitif reel eksenle yaptığı açıya θ diyelim. cos θ x, sin θ y ve buradan tan θ y θ arctan y olup θ ya z z
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU
 RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Akışkanların Dinamiği
 Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
ELASTİK DALGA YAYINIMI
 18.0.016 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (016-1. DERS 1 Zaman ve Yer Ders saati : 10:0 13:00 Ara : 11:15 11:30 Ders yeri : D-331 1 18.0.016 Sizden beklenen Derse devamın sağlanması çok
18.0.016 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (016-1. DERS 1 Zaman ve Yer Ders saati : 10:0 13:00 Ara : 11:15 11:30 Ders yeri : D-331 1 18.0.016 Sizden beklenen Derse devamın sağlanması çok
HARRAN ÜNİVERSİTESİ 2016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ
 HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
ALTERNATİF AKIMIN DENKLEMİ
 1 ALTERNATİF AKIMIN DENKLEMİ ALTERNATİF AKIM Lineer ve Açısal Hız Lineer ve Açısal Hız Lineer hız v, lineer(doğrusal) yer değişiminin(s) bu sürede geçen zamana oranı olarak tanımlanır. Lineer hızın birimi
1 ALTERNATİF AKIMIN DENKLEMİ ALTERNATİF AKIM Lineer ve Açısal Hız Lineer ve Açısal Hız Lineer hız v, lineer(doğrusal) yer değişiminin(s) bu sürede geçen zamana oranı olarak tanımlanır. Lineer hızın birimi
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
ALTERNATİF AKIMIN DENKLEMİ
 1 ALTERNATİF AKIMIN DENKLEMİ Ani ve Maksimum Değerler Alternatif akımın elde edilişi incelendiğinde iletkenin 90 ve 270 lik dönme hareketinin sonunda maksimum emk nın indüklendiği görülür. Alternatif akımın
1 ALTERNATİF AKIMIN DENKLEMİ Ani ve Maksimum Değerler Alternatif akımın elde edilişi incelendiğinde iletkenin 90 ve 270 lik dönme hareketinin sonunda maksimum emk nın indüklendiği görülür. Alternatif akımın
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Şekil 1. DEÜ Test Asansörü kuyusu.
 DOKUZ EYLÜL ÜNĐVERSĐTESĐ TEST ASANSÖRÜ KUYUSUNUN DEPREM YÜKLERĐ ETKĐSĐ ALTINDAKĐ DĐNAMĐK DAVRANIŞININ ĐNCELENMESĐ Zeki Kıral ve Binnur Gören Kıral Dokuz Eylül Üniversitesi, Mühendislik Fakültesi, Makine
DOKUZ EYLÜL ÜNĐVERSĐTESĐ TEST ASANSÖRÜ KUYUSUNUN DEPREM YÜKLERĐ ETKĐSĐ ALTINDAKĐ DĐNAMĐK DAVRANIŞININ ĐNCELENMESĐ Zeki Kıral ve Binnur Gören Kıral Dokuz Eylül Üniversitesi, Mühendislik Fakültesi, Makine
1. Hafta Uygulama Soruları
 . Hafta Uygulama Soruları ) x ekseni, x = doğrusu, y = x ve y = x + eğrileri arasında kalan alan nedir? ) y = x 3 ve y = 4 x 3 parabolleri arasında kalan alan nedir? 3) y = x, x y = 4 eğrileri arasında
. Hafta Uygulama Soruları ) x ekseni, x = doğrusu, y = x ve y = x + eğrileri arasında kalan alan nedir? ) y = x 3 ve y = 4 x 3 parabolleri arasında kalan alan nedir? 3) y = x, x y = 4 eğrileri arasında
MAK 308 MAKİNA DİNAMİĞİ
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Bu sunum, ders kitabına ek olarak Sayın Prof. Dr. Turgut Tümer in Temel Makina Dinamiği Eğitimi Çalıştayında yaptığı sunumdan yararlanılarak hazırlanmıştır.
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Bu sunum, ders kitabına ek olarak Sayın Prof. Dr. Turgut Tümer in Temel Makina Dinamiği Eğitimi Çalıştayında yaptığı sunumdan yararlanılarak hazırlanmıştır.
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
2. POTANSİYEL VE KİNETİK ENERJİ 2.1. CİSİMLERİN POTANSİYEL ENERJİSİ. Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir.
 BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
KKKKK VERİLER. Yer çekimi ivmesi : g=10 m/s 2. Metrik Ön Takılar sin 45 = cos 45 = 0,7
 VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
DENEY 6 BASİT SARKAÇ
 DENEY 6 BASİT SARKAÇ AMAÇ: Bir basit sarkacın temel fiziksel özelliklerinin incelenmesi. TEORİ: Basit sarkaç şekilde görüldüğü gibi kütlesiz bir ip ve ucuna asılı noktasal bir kütleden ibarettir. Şekil
DENEY 6 BASİT SARKAÇ AMAÇ: Bir basit sarkacın temel fiziksel özelliklerinin incelenmesi. TEORİ: Basit sarkaç şekilde görüldüğü gibi kütlesiz bir ip ve ucuna asılı noktasal bir kütleden ibarettir. Şekil
SORULAR. x=l. Şekil-1
 FİZ-217-01-02 Titreşimler ve Dalgalar: Dönem Sonu Sınavı 13 Ocak 2012; Sınav süresi: 150 dakika Adı-Soyadı: No: Şubesi: İmza: Soru Puan 1 18: a=12, b=6 2 18: a=6,b=12 3 18: a=4,b=4,c=4,d=6 4 18: a=4,b=6,c=6,d=2
FİZ-217-01-02 Titreşimler ve Dalgalar: Dönem Sonu Sınavı 13 Ocak 2012; Sınav süresi: 150 dakika Adı-Soyadı: No: Şubesi: İmza: Soru Puan 1 18: a=12, b=6 2 18: a=6,b=12 3 18: a=4,b=4,c=4,d=6 4 18: a=4,b=6,c=6,d=2
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
5.DENEY. d F. ma m m dt. d y. d y. -kx. Araç. Basit. denge (1) (2) (3) denklemi yazılabilir. (4)
 (2) (3) denklemi yazılabilir. (4)") YAYLI ve BASİ SARKAÇ 5.DENEY. Amaç: i) Bir spiral yayın yay sabitinin belirlenmesi vee basit harmonik hareket yapan bir cisminn periyodununn incelenmesi. ii) Basit sarkaç kullanılarak yerçekimi ivmesininn
YAYLI ve BASİ SARKAÇ 5.DENEY. Amaç: i) Bir spiral yayın yay sabitinin belirlenmesi vee basit harmonik hareket yapan bir cisminn periyodununn incelenmesi. ii) Basit sarkaç kullanılarak yerçekimi ivmesininn
FİZ217 TİTREŞİMLER VE DALGALAR DERSİNİN 2. ARA SINAV SORU CEVAPLARI
 1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
İÇİNDEKİLER. Ön Söz...2. Adi Diferansiyel Denklemler...3. Birinci Mertebeden ve Birinci Dereceden. Diferansiyel Denklemler...9
 İÇİNDEKİLER Ön Söz... Adi Diferansiyel Denklemler... Birinci Mertebeden ve Birinci Dereceden Diferansiyel Denklemler...9 Homojen Diferansiyel Denklemler...15 Tam Diferansiyel Denklemler...19 Birinci Mertebeden
İÇİNDEKİLER Ön Söz... Adi Diferansiyel Denklemler... Birinci Mertebeden ve Birinci Dereceden Diferansiyel Denklemler...9 Homojen Diferansiyel Denklemler...15 Tam Diferansiyel Denklemler...19 Birinci Mertebeden
Şimdi sürtünmesiz yatay düzlemde bir doğru boyunca titreşim hareketi yapan kütle-yay sistemine yakından bakacağız (Şekil-3.1).
.") BÖLÜM-3 3.1 FİZİKSEL SİSTEMLERİN SERBEST SALINIMLARI Bu bölümde periyodik titreşim hareketi yapan fiziksel sistemler incelenecektir. Periyodik titreşim hareketi, denge konumu etrafında eşit zaman aralıklarında
BÖLÜM-3 3.1 FİZİKSEL SİSTEMLERİN SERBEST SALINIMLARI Bu bölümde periyodik titreşim hareketi yapan fiziksel sistemler incelenecektir. Periyodik titreşim hareketi, denge konumu etrafında eşit zaman aralıklarında
İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER
 İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER 1.1. Fiziksel Kanunlar ve Diferensiyel Denklemler Arasındaki İlişki... 1 1.2. Diferensiyel Denklemlerin Sınıflandırılması ve Terminoloji...
İÇİNDEKİLER KISIM 1: BİRİNCİ MERTEBE ADİ DİFERENSİYEL DENKLEMLER 1.1. Fiziksel Kanunlar ve Diferensiyel Denklemler Arasındaki İlişki... 1 1.2. Diferensiyel Denklemlerin Sınıflandırılması ve Terminoloji...
TÜREV VE UYGULAMALARI
 TÜREV VE UYGULAMALARI 1-TÜREVİN TANIMI VE GÖSTERİLİŞİ a,b R olmak üzere, f:[a,b] R fonksiyonu verilmiş olsun. x 0 (a,b) için lim x X0 f(x)-f( x 0 ) limiti bir gerçel sayı ise bu limit değerine f fonksiyonunun
TÜREV VE UYGULAMALARI 1-TÜREVİN TANIMI VE GÖSTERİLİŞİ a,b R olmak üzere, f:[a,b] R fonksiyonu verilmiş olsun. x 0 (a,b) için lim x X0 f(x)-f( x 0 ) limiti bir gerçel sayı ise bu limit değerine f fonksiyonunun
TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü. Basit Harmonik Hareket Deneyi Deney Föyü. Edirne
 TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü Basit Harmonik Hareket Deneyi Deney Föyü Edirne 2016 İçindekiler: 1.Deney Hakkında Teorik Bilgi 1 1.a) Yaylar ve Mekanik Özellikleri
TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü Basit Harmonik Hareket Deneyi Deney Föyü Edirne 2016 İçindekiler: 1.Deney Hakkında Teorik Bilgi 1 1.a) Yaylar ve Mekanik Özellikleri
DİNAMİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
Fizik 103 Ders 9 Dönme, Tork Moment, Statik Denge
 Fizik 3 Ders 9 Döne, Tork Moent, Statik Denge Dr. Ali ÖVGÜN DAÜ Fizik Bölüü www.aovgun.co q θ Döne Kineatiği s ( π )r θ nın birii radyan (rad) dır. Bir radyan, yarçapla eşit uzunluktaki bir yay parasının
Fizik 3 Ders 9 Döne, Tork Moent, Statik Denge Dr. Ali ÖVGÜN DAÜ Fizik Bölüü www.aovgun.co q θ Döne Kineatiği s ( π )r θ nın birii radyan (rad) dır. Bir radyan, yarçapla eşit uzunluktaki bir yay parasının
5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri
 Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
O xyz OXYZ. Düzgün Doğrusal Öteleme. O 1 in yörüngesi bir Doğru olacak
 3.14 Bağıl Hareket Bu ana kadar Newton un ikinci kanununu, enerji-iş eşitliklerini ve impuls-momentum eşitliklerini, sait ir eksen takımına göre uyguladık. Gerçekte hiç ir eksen takımı ise gerçekte sait
3.14 Bağıl Hareket Bu ana kadar Newton un ikinci kanununu, enerji-iş eşitliklerini ve impuls-momentum eşitliklerini, sait ir eksen takımına göre uyguladık. Gerçekte hiç ir eksen takımı ise gerçekte sait
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
9.14 Burada u ile u r arasındaki açı ve v ile u θ arasındaki acının θ olduğu dikkate alınarak trigonometrik eşitliklerden; İfadeleri elde edilir.
 9.14 Burada u ile u r arasındaki açı ve v ile u θ arasındaki acının θ olduğu dikkate alınarak trigonometrik eşitliklerden; İfadeleri elde edilir. 9.15 Bu bölümde verilen koordinat dönüşümü uygulanırsa;
9.14 Burada u ile u r arasındaki açı ve v ile u θ arasındaki acının θ olduğu dikkate alınarak trigonometrik eşitliklerden; İfadeleri elde edilir. 9.15 Bu bölümde verilen koordinat dönüşümü uygulanırsa;
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 8 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 14 Kasım 1999 Saat: 18.20 Problem 8.1 Bir sonraki hareket bir odağının merkezinde gezegenin
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 8 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 14 Kasım 1999 Saat: 18.20 Problem 8.1 Bir sonraki hareket bir odağının merkezinde gezegenin
8.04 Kuantum Fiziği Ders XII
 Enerji ölçümünden sonra Sonucu E i olan enerji ölçümünden sonra parçacık enerji özdurumu u i de olacak ve daha sonraki ardışık tüm enerji ölçümleri E i enerjisini verecektir. Ölçüm yapılmadan önce enerji
Enerji ölçümünden sonra Sonucu E i olan enerji ölçümünden sonra parçacık enerji özdurumu u i de olacak ve daha sonraki ardışık tüm enerji ölçümleri E i enerjisini verecektir. Ölçüm yapılmadan önce enerji
Uydu Yörüngelerine Giriş
 Uydu Yörüngelerine Giriş Niçin Uydular Dolanıyor? Merkezcil kuvvet ile çekim kuvveti t ye bağlı değişim göstermezse yörünge dairesel olur. Eğer hız biraz fazla veya az ise, yani t ye bağlı değişiyorsa
Uydu Yörüngelerine Giriş Niçin Uydular Dolanıyor? Merkezcil kuvvet ile çekim kuvveti t ye bağlı değişim göstermezse yörünge dairesel olur. Eğer hız biraz fazla veya az ise, yani t ye bağlı değişiyorsa
Sağ Taraf Fonksiyonu İle İlgili Özel Çözüm Örnekleri(rezonans durumlar)
") 3.1.2.1. Sağ Taraf Fonksiyonu İle İlgili Özel Çözüm Örnekleri(rezonans durumlar) ÖRNEK: y + 4.y + 4.y = 5.sin2x diferensiyel denkleminin genel çözümünü bulalım: Homojen kısmın çözümü: y + 4.y + 4.y = 0
3.1.2.1. Sağ Taraf Fonksiyonu İle İlgili Özel Çözüm Örnekleri(rezonans durumlar) ÖRNEK: y + 4.y + 4.y = 5.sin2x diferensiyel denkleminin genel çözümünü bulalım: Homojen kısmın çözümü: y + 4.y + 4.y = 0
1. BÖLÜM FİZİĞİN DOĞASI - VEKTÖRLER DENGE - MOMENT - AĞIRLIK MERKEZİ
 1. BÖLÜM FİZİĞİN DĞASI - VEKÖRLER DENGE - MMEN - AĞIRLIK MERKEZİ FİZİĞİN DĞASI - VEKÖRLER - DENGE - MMEN - AĞIRLIK MERKEZİ SRULAR 1. I. ork (x) II. Güç (P) III. Açısal momentum (L) Yukarıdakilerden hangisi
1. BÖLÜM FİZİĞİN DĞASI - VEKÖRLER DENGE - MMEN - AĞIRLIK MERKEZİ FİZİĞİN DĞASI - VEKÖRLER - DENGE - MMEN - AĞIRLIK MERKEZİ SRULAR 1. I. ork (x) II. Güç (P) III. Açısal momentum (L) Yukarıdakilerden hangisi
Diferansiyel denklemler uygulama soruları
 . Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
. Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
Kinetik Problemleri için Çözüm yöntemleri i.) Newton un 2. yasası F = m a. ii.) İş-Enerji Yöntemi. iii.) İmpuls-momentum yöntemi
 Newton un 2. yasası F = m a. ii.) İş-Enerji Yöntemi. iii.) İmpuls-momentum yöntemi") Giriş Kinetik: Parçacığın hareketi ve parçacığın hareketini yaratan kuvvetler arasındaki ilişkiyi inceleyen bilim dalıdır. Kabaca bir formül ile ifade edilir. F = m a 1 Kinetik Problemleri için Çözüm yöntemleri
Giriş Kinetik: Parçacığın hareketi ve parçacığın hareketini yaratan kuvvetler arasındaki ilişkiyi inceleyen bilim dalıdır. Kabaca bir formül ile ifade edilir. F = m a 1 Kinetik Problemleri için Çözüm yöntemleri
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
DENKLEMLER CAUCHY-EULER DENKLEMİ. a n x n dn y dx n + a n 1x n 1 dn 1 y
 SABİT KATSAYILI DENKLEMLERE DÖNÜŞTÜREBİLEN DENKLEMLER Bu bölümde sabit katsayılı diferansiyel denklemlere dönüşebilen değişken katsayılı diferansiyel denklemlerden Cauchy Euler ve Legendre difarensiyel
SABİT KATSAYILI DENKLEMLERE DÖNÜŞTÜREBİLEN DENKLEMLER Bu bölümde sabit katsayılı diferansiyel denklemlere dönüşebilen değişken katsayılı diferansiyel denklemlerden Cauchy Euler ve Legendre difarensiyel
İşaret ve Sistemler. Ders 3: Periyodik İşaretlerin Frekans Spektrumu
 İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
Fizik 101: Ders 17 Ajanda
 izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
8.04 Kuantum Fiziği Ders X. Schrödinger denk. bir V(x) potansiyeli içinde bir boyutta bir parçacığın hareketini inceler.
 potansiyeli içinde bir boyutta bir parçacığın hareketini inceler.") Schrödinger denklemi Schrödinger denk. bir V(x) potansiyeli içinde bir boyutta bir parçacığın hareketini inceler. Köşeli parantez içindeki terim, dalga fonksiyonuna etki eden bir işlemci olup, Hamilton
Schrödinger denklemi Schrödinger denk. bir V(x) potansiyeli içinde bir boyutta bir parçacığın hareketini inceler. Köşeli parantez içindeki terim, dalga fonksiyonuna etki eden bir işlemci olup, Hamilton
TEMEL SI BİRİMLERİ BOYUTSUZ SI BİRİMLERİ
 TEMEL SI BİRİMLERİ fiziksel nicelik nicelik simgesi isim simge uzunluk l, b, d, h, r, s metre m kütle m kilogram kg zaman t saniye s akım I amper A termodinamik sıcaklık T kelvin K substans miktarı n mol
TEMEL SI BİRİMLERİ fiziksel nicelik nicelik simgesi isim simge uzunluk l, b, d, h, r, s metre m kütle m kilogram kg zaman t saniye s akım I amper A termodinamik sıcaklık T kelvin K substans miktarı n mol
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
Fizik 101-Fizik I
 Fizik 101-Fizik I 2013-2014 Dairesel Hareket ve Newton Kanunlarının Diğer Uygulamaları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Newton nun İkinci Yasasının Düzgün Dairesel Harekete Uygulanması Sabit hızla
Fizik 101-Fizik I 2013-2014 Dairesel Hareket ve Newton Kanunlarının Diğer Uygulamaları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Newton nun İkinci Yasasının Düzgün Dairesel Harekete Uygulanması Sabit hızla
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
Temel Kavramlar ve Hesap Yöntemleri. Döşeme Sistemlerinde Titreşim Ve Kullanım Durumlarına Göre Tasarım. Neden döşeme titreşimleriyle ilgileniyoruz?
 .1.8.6.4. 5 1 15 5 3 35 -. -.4 -.6 -.8 TMMOB İMO İSTANBUL ŞUBESİ 18 YILI (ŞB-1) MESLEK İÇİ EĞİTİM SEMİNERLERİ DÖŞEME SİSTEMLERİNDE TİTREŞİM VE KULLANIM DURUMLARINA GÖRE TASARIM NEDEN TİTREŞİMLERLE İLGİLENİYORUZ?
.1.8.6.4. 5 1 15 5 3 35 -. -.4 -.6 -.8 TMMOB İMO İSTANBUL ŞUBESİ 18 YILI (ŞB-1) MESLEK İÇİ EĞİTİM SEMİNERLERİ DÖŞEME SİSTEMLERİNDE TİTREŞİM VE KULLANIM DURUMLARINA GÖRE TASARIM NEDEN TİTREŞİMLERLE İLGİLENİYORUZ?
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin 4 = cos 4 = 0,7 Rakam Ön Takı Simge sin 7 = cos = 0,6 sin = cos 7 = 0,8 10 9 giga G tan 7 = 0,7 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo
VERİER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin 4 = cos 4 = 0,7 Rakam Ön Takı Simge sin 7 = cos = 0,6 sin = cos 7 = 0,8 10 9 giga G tan 7 = 0,7 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo
Elektromanyetik Dalga Teorisi Ders-3
 Elektromanyetik Dalga Teorisi Ders-3 Faz ve Grup Hızı Güç ve Enerji Düzlem Dalgaların Düzlem Sınırlara Dik Gelişi Düzlem Dalgaların Düzlem Sınırlara Eğik Gelişi Dik Kutuplama Paralel Kutuplama Faz ve Grup
Elektromanyetik Dalga Teorisi Ders-3 Faz ve Grup Hızı Güç ve Enerji Düzlem Dalgaların Düzlem Sınırlara Dik Gelişi Düzlem Dalgaların Düzlem Sınırlara Eğik Gelişi Dik Kutuplama Paralel Kutuplama Faz ve Grup
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
MKM 308 Makina Dinamiği
 MKM 308 Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü E k E k = Q k n: Serbestlik Derecesi Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü k = 1,, 3,.., n E k
MKM 308 Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü E k E k = Q k n: Serbestlik Derecesi Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü k = 1,, 3,.., n E k