Bulanık-PID Kontrolör Parametrelerinin Diferansiyel Gelişim Algoritması ile En Uygunlaması
|
|
|
- Aysel Adıvar
- 7 yıl önce
- İzleme sayısı:
Transkript
1 Bulanık-PID Kontrolör Parametrelerinin Diferansiyel Gelişim Algoritması ile En Uygunlaması Ahmet CĐHAN, Cihan KARAKUZU 2 Kocaeli Üniversitesi, Endüstri Mühendisliği Bölümü 2 Kocaeli Üniversitesi Elektronik ve Haberleşme Mühendisliği Bölümü Özet: ahmet.can.cihan@gmail.com, cihankk@kocaeli.edu.tr Bu çalışmada, bulanık parametrelerin belirlenmesinde karşılaşılan sorunların üstesinden gelebilmek için yapay zeka teknikleri içerisinde yer alan diferansiyel gelişim algoritması yaklaşımının kullanılabileceği gösterilmiştir.doğrusal olmayan bir modele sahip ters sarkaç kontrol problemi için bir bulanık kontrolör tasarlanmış, diferansiyel gelişim algoritması yardımı ile de üçgensel olarak seçilen bulanık üyelik fonksiyonlarına ait parametrelerin etkin bir biçimde belirlenebileceği gösterilmiştir.. Giriş Son yirmi yılda bilgisayar teknolojisindeki gelişmelerden sonra matematiksel çözüm yöntemlerinde karşılaşılan zorluklar nedeniyle metasezgisel adıyla bilinen ve en uygun çözümü bulması kesin olmamasına rağmen uygun çözüm sunan algoritmalar geliştirilmiştir. Ayrıca insanların düşünce biçimine benzer biçimde sözel olarak ifade edilen modellerin daha matematiksel olarak ifade edilip modelinin kurulmasına ve modelin çözümüne olanak sağlayan bulanık mantık yöntemleri geliştirilmiştir. Bulanık mantık yöntemlerinin en önemli özellikleri ise doğrusal olamayan sistemler için matematiksel bir modele gereksinimlerinin olmamasıdır. Ancak matematiksel modele gereksinim duymamalarının yanında bulanık sistem parametrelerinin ve kural tabanının belirlenmesi için her ne kadar istatistik bilimine dayalı yöntemler kullanılabilse de doğruluğu kesin bir yöntem geliştirilmemiştir. Kullanılan bulanık kontrol sistemlerinde genellikle kullanıcı deneyimlerine dayalı olan üyelik fonksiyonu parametreleri, bulandırma, kural tabanı, durulama parametreleri kullanılmaktadır. Bu durum bilimsel yöntemlerden uzak olması yanında, maliyet ve sistem gereksinimleri açısından da büyük problemlerde sorun teşkil etmektedir. Bu sebeple bu parametlerin otomatik belirlemesi son zamanlarda ilgi çeken konu olmuştur. Örneğim [3] de bu çalışmada da kullanılan ters sarkaç sisteminin kontrolü için genetik algoritma tabanlı bulanık kontrolör tasarımı yapılmıştır. Yine metasezgisel bir yöntem olan PSO ile [4] de kaotik sistem kontrolü için Sugeno yapılı bulanık-pd kontrolör parametre en iyilemesi yapılmıştır. [5] karınca koloni ile ve [6] Tabu arama algoritmaları ile bulanık kontrolör parametre belirleme çalışmalarına birer örnektir. Bu çalışmada bulanık kontrol sistemlerinin üyelik fonksiyonu parametrelerin belirlenmesi için diferansiyel gelişim algoritmasının kullanımı üzerinde durulmuş ve doğrusal olmayan bir sistem olan ters sarkaç problemi için bulanık mantık kontrolcüsünün üyelik fonksiyonlarına ait parametrelerin değerlerinin bulunması üzerine uygulama yapılmıştır. 2. Bulanık Kontrolör Yapısı Bulanık mantık Lotfi A. Zadeh tarafından geliştirilmiştir. Bulanık mantık çıkarımları bulanık kümeler ile çalışmaktadır. Klasik kümeler sadece iki değerli üyelik değerlerini kullanırken, bulanık kümeler ara değerleri kısmi üyelik kavramı olarak kullanarak genişletmektedir. Bulanık kümeler en etkin olarak sözel ifadelerin sayısallaştırılmasında yaygın biçimde kullanılır. Bu özelliği bulanık mantık çıkarımlarının daha etkin olmasını da sağlar. Basit bir bulanık çıkarım mekanizmasının işleyişi Şekil ile gösterilmiştir. Şekil : Bulanık çıkarım mekanizması Bulandırma için genel olarak üçgen üyelik fonksiyonları, yamuk üyelik fonksiyonları, sigmoid üyelik fonksiyonları, daha istatistiksel olarak düşünülebilecek gauss üyelik fonksiyonları gibi üyelik fonksiyonları, bulanık çıkarım motoru olarak mamdani, sugeno ve benzeri bulanık çıkarım motor modelleri, durulama yöntemi olarak ise ağırlık merkezi, en yüksek üyelik derecesi, kenarortayı gibi model ve yöntemler mevcuttur. Özellikle doğrusal olmayan sistem modelleme ve kontrolünde yaşanan zorlukları aşmada bulanık mantık başarılı olmuştur. Bu sebeple kontrol mühendisliği sahasında da çok çeşitli kullanım alanları bulmuştur. Bulanık kontrolörler kontrol edilecek sisteme göre çok farklı girişlere ve sistemi kontrol etmekte kullanılan çok farklı çıkışlara sahip olabilirler. Basit bir bulanık-pid kontrolör yapısı Şekil 2 ile gösterilmiştir. Bu kontrolörde iki giriş değişkeni kullanılmakta, sistemi kontrol için de bir kontrol çıkışı üretilmektedir. Giriş olarak hata ve hatanın türevi kullanılmıştır. Farklı sistemler için farklı durumlar oluşabileceğinden yeterli sayıda ve uygun kontrol girişleri belirlenmelidir. Şekil 2: Bulanık-PID kontrol sistemi

2 3. Diferansiyel gelişim algoritması Diferansiyel gelişim algoritması [] son zamanlarda popüler olan populasyon tabanlı en uygunlama algoritmalarından birisidir. Gerçek değerli parametrelere sahip problemlerin çözümünde küresel en uygunlamada kullanılmak üzere tasarlanmış basit bir algoritmadır. Çözüm uzayının çok büyük olduğu durumlarda veya matematiksel yöntemlerin çok uzun zamanda çözüm bulabildiği problemlerde kullanılması daha uygundur. Sezgisel bir algoritma olduğundan en uygun parametreleri bulması kesin değildir. Ancak yeterli seviyelerde çözümler bulması mümkündür. Bulunan çözüm kabul edilebilir seviyede sonuçlar vermekte ise mühendislik sahasında uygulamaya geçirilebilir. Diferansiyel gelişim algoritmasının pseudo kodu tablo ile verilmiştir. Ayrıca algoritmanın adımları aşağıda kısaca verilmiştir:. Algoritma kontrol parametrelerinin belirlenmesi. (D, G max, NP, F, CR) 2. Başlangıç populasyonun oluşturulması. - NP büyüklüğündeki populasyonun i. bireyi için D parametre sayısı büyüklüğünde vektörel gösterim oluştur. 3. Durdurma kriteri sağlanana kadar mutasyon, rekombinasyon ve seleksiyon. 4. Mutasyon ve rekombinasyon - r, r 2, r 3 değerlerinin rassal olarak (..NP) tamsayı sınırında birbirlerine ve i değerine eşit olmayacak biçimde seç. - J rand rassal olarak (..D) aralığında tamsayı seç. - Her j < D için aday bireyleri belirle. - Eğer rand j [,) < CR v j = j rand ise U j,i,g+ = X j,r3,g + F * (X j,r,g X j,r2,g ) - Diğer durumlarda U j,i,g = X j,i,g 5. Seleksiyon. - Eğer f(u i,g+ ) <= f(x i,g ) ise X i,g+ = U i,g+ - Diğer durumlarda X i,g+ = X i,g 6. Bitir. Burada; NP populasyon büyüklüğünü (>=4 koşulu vardır), F (,+) aralığında ölçekleme faktörü olan kontrol parametresini, CR [,] aralığında rassal kontrol parametresini, G kaçıncı nesilde olunduğunu gösteren parametreyi, Gmax oluşturulacak en fazla nesil sayısını (durdurma kriteri), U çözüm için aday vektörünü, r r 2 r 3 [, NP] aralığında rassal seçilmiş tamsayılar ve f en küçüklenecek ölçüt fonksiyonunu temsil etmektedir. NP adet D boyutlu çözüm vektörü oluşturarak işe başlayan algoritma öncelikle her çözüm vektörü için uygunluk değeri hesaplar. Bir vektörü geliştirmek amacı ile mutasyon ve rekombinasyon için öncelikle hem birbirinden hem de geliştirilecek vektörden farklı üç adet çözüm vektörü rassal olarak seçilir. Vektörün belirttiği parametrenin yeni oluşturulacak olan aday vektörde değişip değişmeyeceği rassal randj değerinin kontrol parametresinden (CR) büyük olup olmamasına bağlıdır. Eğer kontrol parametresinden büyük bir sayı rassal olarak üretilmişse parametre değiştirilmez ve aday çözüm vektöründe parametre geliştirilen vektörden alınır. Eğer değiştirilecek ise yeni parametre oluşturulurken seçilen vektörlerden iki tanesi arasındaki değiştirilen parametre için fark hesaplanır. Bu fark ölçekleme faktörü adı verilen - aralığında değer alan bir parametre ile çarpılır. Sonrasında da rassal seçilmiş olan üçüncü vektörün parametresine eklenir. Her bir vektör için bu işlemler yapılarak aday vektör populasyonu oluşturulur. Bir sonraki nesile geçecek olan çözümler için mevcut her bir vektör ile o vektörün oluşturulmuş olan aday vektörü arasında uygunluk değerleri karşılaştırılarak daha iyi vektörün bir sonraki nesile geçmesi sağlanır. Bu adımlar durdurma kriteri sağlanıncaya kadar tekrar edilir. Tablo : Diferansiyel gelişim algoritmasının Psuedo kodu - Rassal çözümler üret 2- Çözüm vektörlerinin uygunluk değerlerini hesapla. 3- Durdurma kriteri sağlanana kadar tekrarla: for i = :NP Rassal J, r, r 2 ve r 3 tamsayılarını üret for j = :gen sayısı Rassal x sayısı üret Eğer((x CR) veya (j == J) ise yap: u(aday) j = (u(r ) j u(r 2 ) j ) * F + u(r 3 ) j Diğer durumda yap: u(aday) j = u(i) j Son(Eğer) Son(j=:gen sayısı) Son(i=:NP) F(u(aday)) uygunluk değerlerini hesapla Eğer (F(u(aday)) < F(u(i))) ise yap: U(i) = U(aday) Diğer durumda yap: U(i) = U(i) Son(Eğer) Son(Tekrarla) 4- En uygun çözümü seç. 4. Uygulama Yukarıda tanımlanan algoritma ile bulanık kontrolör parametrelerinin belirlenmesi göstermek amacıyla ters sarkaç sisteminin kontrolü seçilmiştir. Ana amaç en uygun kontrol başarımını veren bulanık kontrolör elde etmektir. Kontrol için uygulamada Mamdani bulanık çıkarım mekanizması kullanılacaktır 4.. Ters sarkaç sistemi Şekil 3. Ters sarkaç problemi Kullanılacak olan ters sarkaç sistemi Şekil 3 ile gösterilmiştir. Bu problemde bir yük arabası ve bir sarkaç bulunmaktadır. Yük arabası sağ ve sol yönde yatay olarak yatay eksen boyunca hareket edebilmektedir. Aracın yatay eksen üzerindeki hareketi uygulanan u kuvveti ve sarkaç ağırlığı gibi

3 sistem parametrelerine büyük ölçüde bağlıdır. Konum sistem çözülürken göz önüne alınmamıştır. Sistemin dinamik denklemleri aşağıda verilen denklemler ile tanımlanmaktadır. Ters sarkaç sistemi kapalı döngüye sahip bir sistem olarak modellenebilir. Ancak bunun için gürültü fonksiyonunun bilinmesi gerekmektedir.bu modelde sistemde gürültünün olmadığı varsayılmaktadır. Ayrıca sistemin derece noktasının sarkacın yatay eksene dik durduğu konum olduğu kabul edilir. Saat yönünün tersi pozitif kabul edilmektedir. Bu denklemlerdeki parametreler: m c : Yük arabasının ağırlığı. m p : Sarkacın ağırlığı. g: Yerçekimi ivmesi. u: Sisteme dışarıdan uygulanan kontrol kuvveti. l: Sarkacın yarı uzunluğu. x: dikey eksen ile sarkaç kolu arasındaki açı. Ters sarkaç sistem modeli adi diferansiyel denklem sistemidir. Sistemin çözümü için bu çalışmada Runge-Kutta sayısal analiz yöntemi kullanılmıştır Başlangıç üyelik fonksiyonlarının belirlenmesi Sistemi kontrol etmek için kullanılacak olan açı değeri hatası için beş adet üçgensel, iki adet yamuk üyelik fonksiyonu kullanılmıştır. Kullanılacak olan diğer giriş değeri olan açının türevinin hatası için üç adet üçgensel, iki adet yamuk üyelik fonksiyonu (ÜF) kullanılmıştır. Diferansiyel gelişim algoritmasında başlangıç populasyonu oluşturulurken Üflerin parametreleri ilk ÜFler parametrelerinin.5 ile 2 arasında sayılar ile çarpılmasıyla belirlenmiştir. Böylece uygun sayılabilecek bir başlangıç popülasyonu elde edilmiştir. Đlk ÜFler olarak [2] de kullanılan Üfler kullanılmıştır. Bu ÜFler hata girişi için Şekil 4 ve hatanın türevi girişi için Şekil 5 de gösterilmiştir. Şekil 5: Bulanık- PD de kullanılacak hatanın türevi girişi için başlangıç üyelik fonksiyonları Tablo 2: Bulanık-PD için kural tablosu X X2 PB P Z N NB PVB PVVB PVVB PVB PB P PB PVVB PVB PB P Z P PVB PB P Z N Z PB P Z N NB N P Z N NB NVB NB Z N NB NVB NVVB NVB N NB NVVB NVVB NVVB Kural tabanı ve çıkış ÜFleri diferansiyel gelişim algoritması tarafından en uygun hale getirilmemiş, sabit kabul edilmiştir. Sabit varsayılan kural tabanı Tablo 2 de, çıkış Üfleri de Şekil 6 da verilmiştir. Şekil 6: Bulanık-PD için sabit tutulan çıkış üyelik fonksiyonları Şekil 4: Bulanık-PD de kullanılacak hata girişi için başlangıç üyelik fonksiyonları Şekil 2 den de görüleceği üzere Bulanık-PD nin yanında kalıcı durum hatasını en aza indirebilmek amacı ile ek olarak bulanık integratör (Bulanık-I) de sisteme dahil edilmiştir. Bu birim bulanık-pd ye ek bir destek sağlamak için tasarlandığından uygulayabileceği ek kuvvet katkısı daha sınırlı tutulmuştur. Bulanık-I nın giriş üyelik fonksiyonları Şekil 7 de gösterilmiştir. Bu birim girişine uygulanan hata değerine göre bir ek kuvvet çıktısı üretir. Bu mekanizma için de çıkış üyelik fonksiyonları da Şekil 8 de gösterilmiştir. Bulanık integratörün kural tabanı da Tablo 3 deki sabit tutulmuştur.

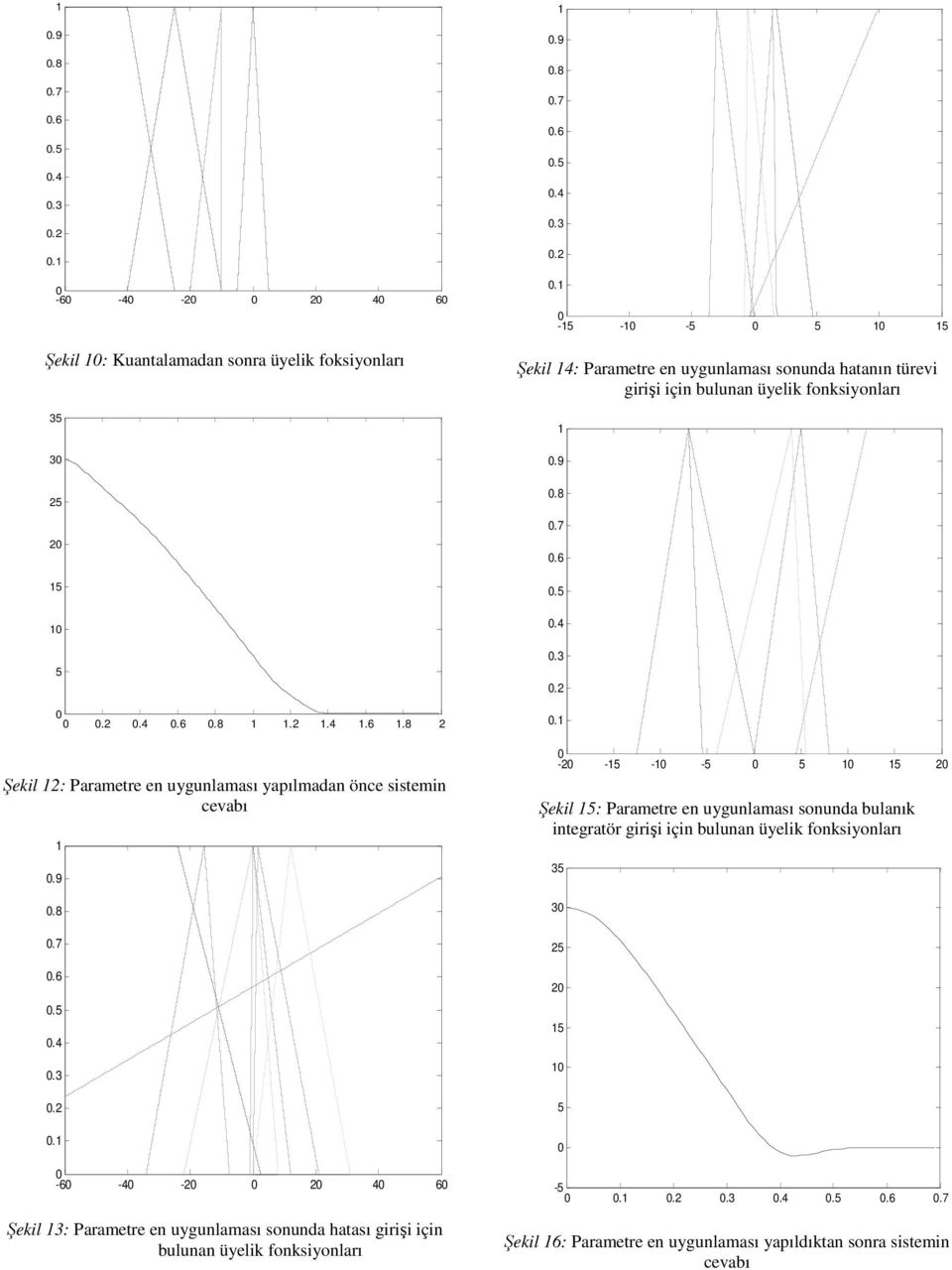
4 biçimli ÜF için 24 parametrenin yamuk ÜF ifade edecek biçime getirilmesi sağlanmış, adet üçgen biçimli ÜF için 33 parametrenin de üçgen biçimli ÜF ifade etmesi sağlanmıştır. Bu parametrelerle ÜFlerin gereken şekilleri almalarını sağlamak için kuantalama kullanılmıştır. Basit bir örnek Şekil 9 ile gösterilmiştir. Şekil 7: Bulanık-I için başlangıç giriş üyelik fonksiyonları Şekil 8: Bulanık-I için çıkış üyelik fonksiyonları Tablo 3: Bulanık-I için kural tablosu e NB N Z P PB u I N N Z P P 4.3. Sistemin parametreleri, karşılaşılan zorluklar ve çözümleri Başlangıç açısı 3 derece, başlangıç ivmesi 2 derece/saniye, m c = kg, m p =.kg, l = m, g = 9.8m/s 2 başlangıç parametreleri ile sistem çözümü yapılmıştır. Sistemde her yinelemede saniye için benzetim uygulanmış ve sistemin oturma zamanının, ortalama hatasının, kalıcı durum hatasının ve yaptığı en büyük aşım miktarının en küçük olması amaçlanmıştır. Oturma değeri hesaplanırken otuma bandında sistemin derece sapma yapmasına müsaade edilmiştir. Yukarıda tanımlanan amaca ulaşmak için parametrelere ağırlık verilerek aşağıdaki amaç fonksiyonu tanımlanmıştır. Amaç değeri = 2 * en büyük aşım miktarı + oturma zamanı + 3 * kalıcı durum hatası + 3 * ortalama hata miktarı Karşılaşılan en büyük sorun ise üçgen veya yamuk ifade etmesi gereken ÜF parametrelerinin algoritma tarafından değiştirilmesi sonucu uygun bir ifadenin oluşmamasıdır. Yani üçgen üyelik ifade etmesi gereken bir çözüm yapısı üçgen ÜF ifade etmemektedir. Bu durumda, üyelik fonksiyonu parametrelerini üçgen veya yamuk ifade edecek biçime getirmek için ÜF parametreleri uygun değerlerle sınırlandırılmıştır. Algoritma ile ayarlanan 6 adet yamuk Şekil 9: Kuantalama işleminin vektörel gösterimi Şekil 9 da görülen 3 adet parametre ile ifade edilen vektörün bir yamuk ve üç adet üçgen üyelik fonksiyonu temsil eden bir yapıda olduğu varsayılmaktadır. Bu vektörün üçüncü alt vektörünün (koyu boyalı olan) bir üçgen üyelik fonksiyonunu temsil etmediği Şekil üzerinde grafiksel olarak görülmektedir. Bu nedenle çözüm değerini üçgen üyelik fonksiyonu biçimine getirmek gerekmektedir. Bunun için alt vektörü bir dik üçgen haline getirmek yeterli olacaktır. Üçgene ait alt kenarın ikinci noktası olan -5 değeri tepe noktası olan - değerine doğru kuantalanmıştır. Böylece alt vektörün [-2 - -] değerini alması ve bulanık üçgen fonksiyonu ifade etmesi sağlanmıştır. Kuantalamadan sonra oluşan üyelik vektörleri ise Şekil ile gösterilmiştir. Uygulamada sistem 3 yineleme için çalıştırılmış ve kontrol başarımında iyileşme sağlanmıştır. Sistem ilk olarak mevcut parametreler ile çalıştırıldığında Şekil 2 ile gösterilen cevap elde edilmiştir. 3 yineleme sonunda bulunan parametrelerin tanımladığı ÜFler hata girişi için Şekil 3 de, hatanın değişimi girişi için Şekil 4 de ve hatanın integrali bulanık kontrolörünün girişi için Şekil 5 te gösterilmiştir. Bu şekillerle verilen ÜFler ile çalışan sistemin cevabı da Şekil 6 da verilmiştir. Şekil 2 ve Şekil 6 da verilen sistem kontrol başarımları incelendiğinde algoritma ile elde edilen iyileşme açıkça ortaya çıkmaktadır Şekil : Kuantalamadan önce üyelik foksiyonları

5 Şekil : Kuantalamadan sonra üyelik foksiyonları Şekil 2: Parametre en uygunlaması yapılmadan önce sistemin cevabı Şekil 3: Parametre en uygunlaması sonunda hatası girişi için bulunan üyelik fonksiyonları Şekil 4: Parametre en uygunlaması sonunda hatanın türevi girişi için bulunan üyelik fonksiyonları Şekil 5: Parametre en uygunlaması sonunda bulanık integratör girişi için bulunan üyelik fonksiyonları Şekil 6: Parametre en uygunlaması yapıldıktan sonra sistemin cevabı
6 5. Sonuç ve Öneriler Diferansiyel gelişim algoritması sürekli paramerler söz konusu olduğunda en uygunlamada kullanılan metodlardan birisidir. Çalışmada yöntemin iyi sonuçlar ürettiği görülmektedir. Daha farklı hedef değerleri ile de sistem test edilmiş ve kalıcı durum hatalarının oluşabildiği görülmüştür. Dolayısıyla sistem için gerekli olan hedef değer önceden belirlenmeli ve bu hedef değer için yöntem çalıştırılmalıdır. Bu sayede hedef değerde en kısa zamanda sistemin dengeye geldiği görülecek ve kalıcı durum hatası ise en aza inecektir. Çalışmada çıkış üyelik fonksiyonları parametreleri en uygunlaması yapılmamış olmasına karşın tüm sistemin parametrelerinin en uygulanması ile daha da iyi sonuçlar elde edilebilir. Ayrıca farklı metasezgisel yöntemlerin kullanımları literatürde mevcuttur [3-6]. Bu çalışma mevcut çalışmalara alternatif olarak diferansiyel gelişim algoritmasını sunmuştur. 6. Kaynaklar [] Storn R., Differential Evolution: A Simple and Efficient Heuristic Strategy for Global Optimization over Continuous Spaces, Journal of Global Optimization, vol., Dordrecht, pp , 997. [2] Becerikli Y., Çelik B.K., Fuzzy Control of Inverted Pendulum and Concept of Stability Using Java Application, Mathematical and Computer Modelling, vol. 46, pp , 27. [3] Wong C.C., Her S.M., A Self-Generating Method for Fuzzy System Design, Fuzzy Sets and Systems, vol. 3, pp. 3-25,999. [4] Karakuzu C., Fuzzy Controller Training Using Particle Swarm Optimization for Nonlinear System Control, ISA Transactions, vol. 47, pp , 28. [5] Baojiang Z., Shiyong L., Ant Colony Optimization Algorithm and Its Application to Neuro-Fuzzy Controller Design, Journal of Systems Engineering and Electronics, vol. 8, no. 3, pp.63-6, 27. [6] Karaboğa D., Bağış A., Haktanır T., Controlling Spillway Gates of Dams by Using Fuzzy Logic Controller with Optimum Rule Number, Applied Soft Computing, vol. 8, pp ,28.

BBO Algoritmasının Optimizasyon Başarımının İncelenmesi Optimization Performance Investigation of BBO Algorithm
 BBO Algoritmasının Optimizasyon Başarımının İncelenmesi Optimization Performance Investigation of BBO Algorithm Tufan İNAÇ 1, Cihan KARAKUZU 2 1 Bilgisayar Mühendisliği Anabilim Dalı Bilecik Şeyh Edebali
BBO Algoritmasının Optimizasyon Başarımının İncelenmesi Optimization Performance Investigation of BBO Algorithm Tufan İNAÇ 1, Cihan KARAKUZU 2 1 Bilgisayar Mühendisliği Anabilim Dalı Bilecik Şeyh Edebali
KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM
 KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM M.Ali Akcayol Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü (Yüksek Lisans Tezinden Bir Bölüm) Şekil 1'
KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM M.Ali Akcayol Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü (Yüksek Lisans Tezinden Bir Bölüm) Şekil 1'
Genetik Algoritmalar. Bölüm 1. Optimizasyon. Yrd. Doç. Dr. Adem Tuncer E-posta:
 Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics
 2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics Özet: Bulanık bir denetleyici tasarlanırken karşılaşılan en önemli sıkıntı, bulanık giriş çıkış üyelik fonksiyonlarının
2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics Özet: Bulanık bir denetleyici tasarlanırken karşılaşılan en önemli sıkıntı, bulanık giriş çıkış üyelik fonksiyonlarının
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Tabu Arama (Tabu Search) Doç.Dr. M. Ali Akcayol Tabu Arama 1986 yılında Glover tarafından geliştirilmiştir. Lokal minimum u elimine edebilir ve global minimum u bulur. Değerlendirme
Zeki Optimizasyon Teknikleri Tabu Arama (Tabu Search) Doç.Dr. M. Ali Akcayol Tabu Arama 1986 yılında Glover tarafından geliştirilmiştir. Lokal minimum u elimine edebilir ve global minimum u bulur. Değerlendirme
KİNETİK MODEL PARAMETRELERİNİN BELİRLENMESİNDE KULLANILAN OPTİMİZASYON TEKNİKLERİNİN KIYASLANMASI
 KİNETİK MODEL PARAMETRELERİNİN BELİRLENMESİNDE KULLANILAN OPTİMİZASYON TEKNİKLERİNİN KIYASLANMASI Hatice YANIKOĞLU a, Ezgi ÖZKARA a, Mehmet YÜCEER a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği
KİNETİK MODEL PARAMETRELERİNİN BELİRLENMESİNDE KULLANILAN OPTİMİZASYON TEKNİKLERİNİN KIYASLANMASI Hatice YANIKOĞLU a, Ezgi ÖZKARA a, Mehmet YÜCEER a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği
Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ANKARA
 GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ANKARA") i GENETİK ALGORİTMA YAKLAŞIMIYLA ATÖLYE ÇİZELGELEME Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ OCAK 2005 ANKARA ii Serdar BİROĞUL tarafından hazırlanan
i GENETİK ALGORİTMA YAKLAŞIMIYLA ATÖLYE ÇİZELGELEME Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ OCAK 2005 ANKARA ii Serdar BİROĞUL tarafından hazırlanan
Yaklaşık Düşünme Teorisi
 Yaklaşık Düşünme Teorisi Zadeh tarafından 1979 yılında öne sürülmüştür. Kesin bilinmeyen veya belirsiz bilgiye dayalı işlemlerde etkili sonuçlar vermektedir. Genellikle bir f fonksiyonu ile x ve y değişkeni
Yaklaşık Düşünme Teorisi Zadeh tarafından 1979 yılında öne sürülmüştür. Kesin bilinmeyen veya belirsiz bilgiye dayalı işlemlerde etkili sonuçlar vermektedir. Genellikle bir f fonksiyonu ile x ve y değişkeni
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ. Ders 1- Yapay Zekâya Giriş. Erhan AKDOĞAN, Ph.D.
 Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN
 PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN 1995 yılında Dr.Eberhart ve Dr.Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir.
PARÇACIK SÜRÜ OPTİMİZASYONU BMÜ-579 METASEZGİSEL YÖNTEMLER YRD. DOÇ. DR. İLHAN AYDIN 1995 yılında Dr.Eberhart ve Dr.Kennedy tarafından geliştirilmiş popülasyon temelli sezgisel bir optimizasyon tekniğidir.
Kaotik Tabanlı Diferansiyel (Farksal) Gelişim Algoritması
 Gelişim Algoritması") Kaotik Tabanlı Diferansiyel (Farksal) Gelişim Algoritması 1 Mehmet Eser * 1 Uğur Yüzgeç 1 Bilecik Şeyh Edebali Üniversitesi, Bilgisayar Mühendisliği Bölümü, 111, Gülümbe, Bilecik 1. Giriş Abstract Differential
Kaotik Tabanlı Diferansiyel (Farksal) Gelişim Algoritması 1 Mehmet Eser * 1 Uğur Yüzgeç 1 Bilecik Şeyh Edebali Üniversitesi, Bilgisayar Mühendisliği Bölümü, 111, Gülümbe, Bilecik 1. Giriş Abstract Differential
Bulanık Mantık Tabanlı Uçak Modeli Tespiti
 Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
4. Bulanık Sayılar- Üyelik Fonksiyonları
 4. Bulanık Sayılar- Üyelik Fonksiyonları Bulanık Sayı Normal ve dışbükey bir bulanık kümenin alfa kesimi kapalı bir küme ise bulanık sayı olarak adlandırılmaktadır. Her bulanık sayı dış bükey bir bulanık
4. Bulanık Sayılar- Üyelik Fonksiyonları Bulanık Sayı Normal ve dışbükey bir bulanık kümenin alfa kesimi kapalı bir küme ise bulanık sayı olarak adlandırılmaktadır. Her bulanık sayı dış bükey bir bulanık
BULANIK MANTIK ile KONTROL
 BULANIK MANTIK ile KONTROL AFYON KOCATEPE ÜNİVERSİTESİ Bulanık mantığın temel prensipleri: Bulanık küme sözel değişkenleri göstermek için kullanılır. Az sıcak, biraz soğuk gibi bulanık mantık üyelik fonksiyonları
BULANIK MANTIK ile KONTROL AFYON KOCATEPE ÜNİVERSİTESİ Bulanık mantığın temel prensipleri: Bulanık küme sözel değişkenleri göstermek için kullanılır. Az sıcak, biraz soğuk gibi bulanık mantık üyelik fonksiyonları
Esnek Hesaplamaya Giriş
 Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
POSITION DETERMINATION BY USING IMAGE PROCESSING METHOD IN INVERTED PENDULUM
 POSITION DETERMINATION BY USING IMAGE PROCESSING METHOD IN INVERTED PENDULUM Melih KUNCAN Siirt Üniversitesi, Mühendislik-Mimarlık Fakültesi, Mekatronik Mühendisliği Bölümü, Siirt, TÜRKIYE melihkuncan@siirt.edu.tr
POSITION DETERMINATION BY USING IMAGE PROCESSING METHOD IN INVERTED PENDULUM Melih KUNCAN Siirt Üniversitesi, Mühendislik-Mimarlık Fakültesi, Mekatronik Mühendisliği Bölümü, Siirt, TÜRKIYE melihkuncan@siirt.edu.tr
YAPAY SİNİR AĞLARI. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
Gevşek Hesaplama (COMPE 474) Ders Detayları
 Ders Detayları") Gevşek Hesaplama (COMPE 474) Ders Detayları Ders Adı Gevşek Hesaplama Ders Kodu COMPE 474 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i Dersin Dili Dersin
Gevşek Hesaplama (COMPE 474) Ders Detayları Ders Adı Gevşek Hesaplama Ders Kodu COMPE 474 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i Dersin Dili Dersin
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Bulanık Kümeler ve Sistemler. Prof. Dr. Nihal ERGİNEL
 Bulanık Kümeler ve Sistemler Prof. Dr. Nihal ERGİNEL İçerik 1. Giriş, Temel Tanımlar ve Terminoloji 2. Klasik Kümeler-Bulanık Kümeler 3. Olasılık Teorisi-Olabilirlik Teorisi 4. Bulanık Sayılar-Üyelik Fonksiyonları
Bulanık Kümeler ve Sistemler Prof. Dr. Nihal ERGİNEL İçerik 1. Giriş, Temel Tanımlar ve Terminoloji 2. Klasik Kümeler-Bulanık Kümeler 3. Olasılık Teorisi-Olabilirlik Teorisi 4. Bulanık Sayılar-Üyelik Fonksiyonları
Rössler Tabanlı Kaotik Farksal Gelişim Algoritması
 Bilecik Şeyh Edebali Üniversitesi Fen Bilimleri Dergisi, Cilt:1, Sayı:, 1 ISSN: 1-33 (http://edergi.bilecik.edu.tr/index.php/fbd) Araştırma Makalesi/Research Article Rössler Tabanlı Kaotik Farksal Gelişim
Bilecik Şeyh Edebali Üniversitesi Fen Bilimleri Dergisi, Cilt:1, Sayı:, 1 ISSN: 1-33 (http://edergi.bilecik.edu.tr/index.php/fbd) Araştırma Makalesi/Research Article Rössler Tabanlı Kaotik Farksal Gelişim
BİRİNCİ BASIMA ÖN SÖZ
 BİRİNCİ BASIMA ÖN SÖZ Varlıkların kendilerinde cereyan eden olayları ve varlıklar arasındaki ilişkileri inceleyerek anlamak ve bunları bilgi formuna dökmek kimya, biyoloji, fizik ve astronomi gibi temel
BİRİNCİ BASIMA ÖN SÖZ Varlıkların kendilerinde cereyan eden olayları ve varlıklar arasındaki ilişkileri inceleyerek anlamak ve bunları bilgi formuna dökmek kimya, biyoloji, fizik ve astronomi gibi temel
13. Olasılık Dağılımlar
 13. Olasılık Dağılımlar Mühendislik alanında karşılaşılan fiziksel yada fiziksel olmayan rasgele değişken büyüklüklerin olasılık dağılımları için model alınabilecek çok sayıda sürekli ve kesikli fonksiyon
13. Olasılık Dağılımlar Mühendislik alanında karşılaşılan fiziksel yada fiziksel olmayan rasgele değişken büyüklüklerin olasılık dağılımları için model alınabilecek çok sayıda sürekli ve kesikli fonksiyon
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yerçekimsel Arama Algoritması ile PID Denetleç Parametrelerinin Tespiti PID Controller Parameters' Optimization Using Gravitational Search Algorithm
 Yerçekimsel Arama Algoritması ile PID Denetleç Parametrelerinin Tespiti PID Controller Parameters' Optimization Using Gravitational Search Algorithm Nesibe Yalçın 1, Semih Çakır 2, Metin Kesler 1, Nihan
Yerçekimsel Arama Algoritması ile PID Denetleç Parametrelerinin Tespiti PID Controller Parameters' Optimization Using Gravitational Search Algorithm Nesibe Yalçın 1, Semih Çakır 2, Metin Kesler 1, Nihan
DAMITMA KOLONLARININ BULANIK DENETLEYİCİLERLE DENETİMİ
 DAMITMA KOLONLARININ BULANIK DENETLEYİCİLERLE DENETİMİ Halil Murat Öztürk, H. Levent Akın 2 Sistem ve Kontrol Mühendisliği Bölümü, Boğaziçi Üniversitesi, 885 Bebek, İstanbul 2 Bilgisayar Mühendisliği Bölümü,
DAMITMA KOLONLARININ BULANIK DENETLEYİCİLERLE DENETİMİ Halil Murat Öztürk, H. Levent Akın 2 Sistem ve Kontrol Mühendisliği Bölümü, Boğaziçi Üniversitesi, 885 Bebek, İstanbul 2 Bilgisayar Mühendisliği Bölümü,
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS ENDÜSTRİ MÜH. İÇİN SAYISAL YÖNTEMLER FEB-321 3/ 2.YY 3+0+0 3 3 Dersin Dili
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS ENDÜSTRİ MÜH. İÇİN SAYISAL YÖNTEMLER FEB-321 3/ 2.YY 3+0+0 3 3 Dersin Dili
1. DÖNEM Kodu Dersin Adı T U K. Matematik II Mathematics II (İng) Fizik I 3 2 4. Bilgisayar Programlama I (Java) Computer Programming I (Java) (İng)
 Fizik I 3 2 4. Bilgisayar Programlama I (Java) Computer Programming I (Java) (İng)") Müfredat: Mekatronik Mühendisliği lisans programından mezun olacak bir öğrencinin toplam 131 kredilik ders alması gerekmektedir. Bunların 8 kredisi öğretim dili Türkçe ve 123 kredisi öğretim dili İngilizce
Müfredat: Mekatronik Mühendisliği lisans programından mezun olacak bir öğrencinin toplam 131 kredilik ders alması gerekmektedir. Bunların 8 kredisi öğretim dili Türkçe ve 123 kredisi öğretim dili İngilizce
ERCİYES ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ SİVİL HAVACILIK ANABİLİM DALI YENİ DERS ÖNERİSİ/ DERS GÜNCELLEME
 / DERS GÜNCELLEME Dersin Kodu SHA 615 Dersin Adı İSTATİSTİKSEL SİNYAL İŞLEME Yarıyılı GÜZ Dersin İçeriği: Olasılık ve olasılıksal süreçlerin gözden geçirilmesi. Bayes kestirim kuramı. Büyük olabilirlik
/ DERS GÜNCELLEME Dersin Kodu SHA 615 Dersin Adı İSTATİSTİKSEL SİNYAL İŞLEME Yarıyılı GÜZ Dersin İçeriği: Olasılık ve olasılıksal süreçlerin gözden geçirilmesi. Bayes kestirim kuramı. Büyük olabilirlik
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
BOĞAZ KÖPRÜSÜ YOLUNA KATILIM NOKTALARINDA TRAFİK AKIMLARININ BULANIK MANTIK YAKLAŞIMI İLE KONTROLÜ VE BİR UYGULAMA ÖRNEĞİ
 BOĞAZ KÖPRÜSÜ YOLUNA KATILIM NOKTALARINDA TRAFİK AKIMLARININ BULANIK MANTIK YAKLAŞIMI İLE KONTROLÜ VE BİR UYGULAMA ÖRNEĞİ Vedat TOPUZ 1 Ahmet AKBAŞ 2 Mehmet TEKTAŞ 3 1,2,3 Marmara Üniversitesi, Teknik
BOĞAZ KÖPRÜSÜ YOLUNA KATILIM NOKTALARINDA TRAFİK AKIMLARININ BULANIK MANTIK YAKLAŞIMI İLE KONTROLÜ VE BİR UYGULAMA ÖRNEĞİ Vedat TOPUZ 1 Ahmet AKBAŞ 2 Mehmet TEKTAŞ 3 1,2,3 Marmara Üniversitesi, Teknik
Sayısal Yöntemler (COMPE 350) Ders Detayları
 Ders Detayları") Sayısal Yöntemler (COMPE 350) Ders Detayları Ders Adı Sayısal Yöntemler Ders Kodu COMPE 350 Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Bahar 2 2 0 3 5.5 Ön Koşul Ders(ler)i Dersin Dili
Sayısal Yöntemler (COMPE 350) Ders Detayları Ders Adı Sayısal Yöntemler Ders Kodu COMPE 350 Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Bahar 2 2 0 3 5.5 Ön Koşul Ders(ler)i Dersin Dili
MONTE CARLO BENZETİMİ
 MONTE CARLO BENZETİMİ U(0,1) rassal değişkenler kullanılarak (zamanın önemli bir rolü olmadığı) stokastik ya da deterministik problemlerin çözümünde kullanılan bir tekniktir. Monte Carlo simülasyonu, genellikle
MONTE CARLO BENZETİMİ U(0,1) rassal değişkenler kullanılarak (zamanın önemli bir rolü olmadığı) stokastik ya da deterministik problemlerin çözümünde kullanılan bir tekniktir. Monte Carlo simülasyonu, genellikle
DEPREM KONUMLARININ BELİRLENMESİNDE BULANIK MANTIK YAKLAŞIMI
 DEPREM KONUMLRININ BELİRLENMESİNDE BULNIK MNTIK YKLŞIMI Koray BODUR 1 ve Hüseyin GÖKLP 2 ÖZET: 1 Yüksek lisans öğrencisi, Jeofizik Müh. Bölümü, Karadeniz Teknik Üniversitesi, Trabzon 2 Yrd. Doç. Dr., Jeofizik
DEPREM KONUMLRININ BELİRLENMESİNDE BULNIK MNTIK YKLŞIMI Koray BODUR 1 ve Hüseyin GÖKLP 2 ÖZET: 1 Yüksek lisans öğrencisi, Jeofizik Müh. Bölümü, Karadeniz Teknik Üniversitesi, Trabzon 2 Yrd. Doç. Dr., Jeofizik
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Genetik Algoritma (Genetic Algorithm) Doç.Dr. M. Ali Akcayol Genetik Algoritma 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik
Zeki Optimizasyon Teknikleri Genetik Algoritma (Genetic Algorithm) Doç.Dr. M. Ali Akcayol Genetik Algoritma 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik
ERCİYES ÜNİVERSİTESİ KİMYA ANABİLİM DALI
 İlaç Tasarımında Yeni Yazılımların Geliştirilmesi: Elektron Konformasyonel-Genetik Algoritma Metodu ile Triaminotriazin Bileşiklerinde Farmakofor Belirlenmesi ve Nicel Biyoaktivite Hesabı; ERCİYES ÜNİVERSİTESİ
İlaç Tasarımında Yeni Yazılımların Geliştirilmesi: Elektron Konformasyonel-Genetik Algoritma Metodu ile Triaminotriazin Bileşiklerinde Farmakofor Belirlenmesi ve Nicel Biyoaktivite Hesabı; ERCİYES ÜNİVERSİTESİ
Tip-1 Bulanık Sistemlerde Tip-2 Bulanık Girişler
 Tip- Bulanık Sistemlerde Tip- Bulanık Girişler Mehmet KARAKÖSE Erhan AKIN Fırat Üniversitesi Bilgisayar Mühendisliği, 39 Elazığ mkarakose@firat.edu.tr eakin@firat.edu.tr Anahtar Sözcükler: Tip- bulanık
Tip- Bulanık Sistemlerde Tip- Bulanık Girişler Mehmet KARAKÖSE Erhan AKIN Fırat Üniversitesi Bilgisayar Mühendisliği, 39 Elazığ mkarakose@firat.edu.tr eakin@firat.edu.tr Anahtar Sözcükler: Tip- bulanık
Genetik Algoritmalar (GA) Genetik Algoritmalar Đçerik Nesin Matematik Köyü E rim Ç lı l ş ı ta t yı Nisan, 2012 Mustafa Suphi Erden
 Genetik Algoritmalar Đçerik Nesin Matematik Köyü E rim Ç lı l ş ı ta t yı Nisan, 2012 Mustafa Suphi Erden") Genetik Algoritmalar Nesin Matematik Köyü Evrim Çalıştayı 20-23 Nisan, 202 Genetik Algoritmalar (GA Đçerik Biyolojiden esinlenme GA nın özellikleri GA nın unsurları uygulama Algoritma Şema teoremi Mustafa
Genetik Algoritmalar Nesin Matematik Köyü Evrim Çalıştayı 20-23 Nisan, 202 Genetik Algoritmalar (GA Đçerik Biyolojiden esinlenme GA nın özellikleri GA nın unsurları uygulama Algoritma Şema teoremi Mustafa
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
GÜZ DÖNEMİ ARASINAV SORULARI. 1. Sayısal çözümleme ve fonksiyonu tanımlayarak kullanıldığı alanları kısaca açıklayınız?
 MAK 05 SAYISAL ÇÖZÜMLEME S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ K F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A şubesi B
MAK 05 SAYISAL ÇÖZÜMLEME S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ K F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A şubesi B
Self Organising Migrating Algorithm
 OPTİMİZASYON TEKNİKLERİ Self Organising Migrating Algorithm Kendini Organize Eden Göç/Geçiş Algoritması MELİH HİLMİ ULUDAĞ Fırat Üniversitesi Teknoloji Fakültesi Yazılım Mühendisliği Bölümü İletişim: www.melihhilmiuludag.com
OPTİMİZASYON TEKNİKLERİ Self Organising Migrating Algorithm Kendini Organize Eden Göç/Geçiş Algoritması MELİH HİLMİ ULUDAĞ Fırat Üniversitesi Teknoloji Fakültesi Yazılım Mühendisliği Bölümü İletişim: www.melihhilmiuludag.com
Fonksiyon Optimizasyonunda Genetik Algoritmalar
 01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Programlama Dilleri 1. Ders 3: Rastgele sayı üretimi ve uygulamaları
 Ders 3: Rastgele sayı üretimi ve uygulamaları Ders 3 Genel Bakış Giriş Rastgele Sayı Rastgele Sayı Üreteci rand Fonksiyonunun İşlevi srand Fonksiyonunun İşlevi Monte Carlo Yöntemi Uygulama 1: Yazı-Tura
Ders 3: Rastgele sayı üretimi ve uygulamaları Ders 3 Genel Bakış Giriş Rastgele Sayı Rastgele Sayı Üreteci rand Fonksiyonunun İşlevi srand Fonksiyonunun İşlevi Monte Carlo Yöntemi Uygulama 1: Yazı-Tura
OPTİMUM GÜÇ AKIŞININ YAPAY ARI KOLONİSİ İLE SAĞLANMASI
 OPTİMUM GÜÇ AKIŞININ YAPAY ARI KOLONİSİ İLE SAĞLANMASI A. Doğan 1 M. Alçı 2 Erciyes Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü 1 ahmetdogan@erciyes.edu.tr 2 malci@erciyes.edu.tr
OPTİMUM GÜÇ AKIŞININ YAPAY ARI KOLONİSİ İLE SAĞLANMASI A. Doğan 1 M. Alçı 2 Erciyes Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü 1 ahmetdogan@erciyes.edu.tr 2 malci@erciyes.edu.tr
GENELLEŞTİRİLMİŞ FUZZY KOMŞULUK SİSTEMİ ÜZERİNE
 ÖZEL EGE LİSESİ GENELLEŞTİRİLMİŞ FUZZY KOMŞULUK SİSTEMİ ÜZERİNE HAZIRLAYAN ÖĞRENCİ: Berk KORKUT DANIŞMAN ÖĞRETMEN: Gizem GÜNEL İZMİR 2013 İÇİNDEKİLER 1. PROJENİN AMACI 3.33 2. GİRİŞ... 3 3. YÖNTEM 3 4.
ÖZEL EGE LİSESİ GENELLEŞTİRİLMİŞ FUZZY KOMŞULUK SİSTEMİ ÜZERİNE HAZIRLAYAN ÖĞRENCİ: Berk KORKUT DANIŞMAN ÖĞRETMEN: Gizem GÜNEL İZMİR 2013 İÇİNDEKİLER 1. PROJENİN AMACI 3.33 2. GİRİŞ... 3 3. YÖNTEM 3 4.
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
 17.05.2014 Sayfa 1 Curve Fitting with RBS Functional Networks RBS fonksiyonel ağı ile eğri uygunluğu Andr es Iglesias, Akemi G alvez Department of Applied Mathematics and Computational Sciences, University
17.05.2014 Sayfa 1 Curve Fitting with RBS Functional Networks RBS fonksiyonel ağı ile eğri uygunluğu Andr es Iglesias, Akemi G alvez Department of Applied Mathematics and Computational Sciences, University
FEN BİLİMLERİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 FEN BİLİMLERİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS SAYISAL YÖNTEMLER FM-223 2 / 2.YY 2 2+0+0 4 Dersin Dili : Türkçe Dersin Seviyesi : Lisans
FEN BİLİMLERİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS SAYISAL YÖNTEMLER FM-223 2 / 2.YY 2 2+0+0 4 Dersin Dili : Türkçe Dersin Seviyesi : Lisans
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Altın Oran (Golden Section Search) Arama Metodu Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Altın Oran (Golden Section Search) Arama Metodu Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f
GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA
 BİNARİ KODLANMIŞ GA") GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği
GENETİK ALGORİTMALARA GİRİŞ (II) BİNARİ KODLANMIŞ GA Nedim TUTKUN Düzce Üniversitesi Elektrik Elektronik Mühendisliği Bölümü nedimtutkun@duzce.edu.tr Düzce Üniversitesi Elektrik&Elektronik Mühendisliği
DİFERANSİYEL GELİŞİM ALGORİTMASI
 İstanbul Ticaret Üniversitesi Fen Bilimleri Dergisi Yıl: 5 Sayı: 9 Bahar 2006/1 s.85-99 DİFERANSİYEL GELİŞİM ALGORİTMASI Timur KESKİNTÜRK ÖZET Doğrusal olmayan problemlerin çözümüne yönelik olarak geliştirilmiş
İstanbul Ticaret Üniversitesi Fen Bilimleri Dergisi Yıl: 5 Sayı: 9 Bahar 2006/1 s.85-99 DİFERANSİYEL GELİŞİM ALGORİTMASI Timur KESKİNTÜRK ÖZET Doğrusal olmayan problemlerin çözümüne yönelik olarak geliştirilmiş
MATLAB A GİRİŞ. EE-346 Hafta-1 Dr. Ayşe DEMİRHAN
 MATLAB A GİRİŞ EE-346 Hafta-1 Dr. Ayşe DEMİRHAN MATLAB Teknik ve bilimsel hesaplamalar için yazılmış yüksek performanslı bir yazılım geliştirme aracı MATrix LABoratory (MATLAB) Boyutlandırma gerekmeyen
MATLAB A GİRİŞ EE-346 Hafta-1 Dr. Ayşe DEMİRHAN MATLAB Teknik ve bilimsel hesaplamalar için yazılmış yüksek performanslı bir yazılım geliştirme aracı MATrix LABoratory (MATLAB) Boyutlandırma gerekmeyen
Özetçe. Abstract. 1. Giriş. 2. Adaptif Gürültü Giderme. Nalân YĐĞĐT 1 Nurhan KARABOĞA 2 Burak GÜRER 3
 Adaptif Süzgeçlerde Farksal Gelişim Algoritması Kullanılarak Gürültü Giderme Noise Cancellation Using Differential Evolution Algorithm For Adaptive Filters Nalân YĐĞĐT 1 Nurhan KARABOĞA 2 Burak GÜRER 3
Adaptif Süzgeçlerde Farksal Gelişim Algoritması Kullanılarak Gürültü Giderme Noise Cancellation Using Differential Evolution Algorithm For Adaptive Filters Nalân YĐĞĐT 1 Nurhan KARABOĞA 2 Burak GÜRER 3
YÖNEYLEM ARAŞTIRMASI - III
 YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Bu bölümde eşitsizlik kısıtlarına bağlı bir doğrusal olmayan kısıta sahip problemin belirlenen stasyoner noktaları
YÖNEYLEM ARAŞTIRMASI - III Prof. Dr. Cemalettin KUBAT Yrd. Doç. Dr. Özer UYGUN İçerik Bu bölümde eşitsizlik kısıtlarına bağlı bir doğrusal olmayan kısıta sahip problemin belirlenen stasyoner noktaları
BIL1202 ALGORİTMA VE PROGRAMLAMAYA GİRİŞ
 2017-2018 BaharYarıyılı Balıkesir Üniversitesi Endüstri Mühendisliği Bölümü 6 BIL1202 ALGORİTMA VE PROGRAMLAMAYA GİRİŞ (Temel Algoritma Örnekleri, Genel Uygulamalar) Yrd. Doç. Dr. İbrahim Küçükkoç Web:
2017-2018 BaharYarıyılı Balıkesir Üniversitesi Endüstri Mühendisliği Bölümü 6 BIL1202 ALGORİTMA VE PROGRAMLAMAYA GİRİŞ (Temel Algoritma Örnekleri, Genel Uygulamalar) Yrd. Doç. Dr. İbrahim Küçükkoç Web:
METASEZGİSEL YÖNTEMLER
 METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
Şekil 6.1 Basit sarkaç
 Deney No : M5 Deney Adı : BASİT SARKAÇ Deneyin Amacı yer çekimi ivmesinin belirlenmesi Teorik Bilgi : Sabit bir noktadan iple sarkıtılan bir cisim basit sarkaç olarak isimlendirilir. : Basit sarkaçta uzunluk
Deney No : M5 Deney Adı : BASİT SARKAÇ Deneyin Amacı yer çekimi ivmesinin belirlenmesi Teorik Bilgi : Sabit bir noktadan iple sarkıtılan bir cisim basit sarkaç olarak isimlendirilir. : Basit sarkaçta uzunluk
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS SAYISAL YÖNTEMLER FEB-311 3/ 1.YY 2+0+0 2 3 Dersin Dili Dersin Seviyesi
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS SAYISAL YÖNTEMLER FEB-311 3/ 1.YY 2+0+0 2 3 Dersin Dili Dersin Seviyesi
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS DİFERANSİYEL DENKLEMLER FEB-211 2/ 1.YY 3+0+0 3 3 Dersin Dili Dersin Seviyesi
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS DİFERANSİYEL DENKLEMLER FEB-211 2/ 1.YY 3+0+0 3 3 Dersin Dili Dersin Seviyesi
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ EĞİTİM ÖĞRETİM YILI DERS KATALOĞU
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ - EĞİTİM ÖĞRETİM YILI DERS KATALOĞU Ders Kodu Bim Kodu Ders Adı Türkçe Ders Adı İngilizce Dersin Dönemi T Snf Açıl.Dönem P
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ - EĞİTİM ÖĞRETİM YILI DERS KATALOĞU Ders Kodu Bim Kodu Ders Adı Türkçe Ders Adı İngilizce Dersin Dönemi T Snf Açıl.Dönem P
KAHRAMANMARAŞ SÜTÇÜ İMAM ÜNİVERSİTESİ EĞİTİM ÖĞRETİM YILI FEN-EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ BİRİNCİ VE İKİNCİ ÖĞRETİM DERSLERİ
 I. YARIYIL Adı Teori Uygulama KSU MT101 Analiz I 6 4 2 5 7 MT107 Soyut Matematik I 4 4 0 4 5 MT109 Analitik Geometri I 4 4 0 4 5 FZ173 Fizik I 4 4 0 4 4 OZ101 Türk Dili I 2 2 0 2 2 OZ121 Ingilizce I 2
I. YARIYIL Adı Teori Uygulama KSU MT101 Analiz I 6 4 2 5 7 MT107 Soyut Matematik I 4 4 0 4 5 MT109 Analitik Geometri I 4 4 0 4 5 FZ173 Fizik I 4 4 0 4 4 OZ101 Türk Dili I 2 2 0 2 2 OZ121 Ingilizce I 2
CBS ve Coğrafi Hesaplama
 Yıldız Teknik Üniversitesi CBS ve Coğrafi Hesaplama 2. Bölüm Yrd. Doç. Dr. Alper ŞEN Harita Mühendisliği Bölümü Kartografya Anabilim Dalı web: http://www.yarbis.yildiz.edu.tr/alpersen/ E mail: alpersen@yildiz.edu.tr
Yıldız Teknik Üniversitesi CBS ve Coğrafi Hesaplama 2. Bölüm Yrd. Doç. Dr. Alper ŞEN Harita Mühendisliği Bölümü Kartografya Anabilim Dalı web: http://www.yarbis.yildiz.edu.tr/alpersen/ E mail: alpersen@yildiz.edu.tr
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ
 DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS MATEMATİK-II FEB-121 1/ 2. YY 5+0+0 5 5 Dersin Dili Dersin Seviyesi : Türkçe
DENİZ HARP OKULU TEMEL BİLİMLER BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf/Y.Y. Ders Saati (T+U+L) Kredi AKTS MATEMATİK-II FEB-121 1/ 2. YY 5+0+0 5 5 Dersin Dili Dersin Seviyesi : Türkçe
BLG 1306 Temel Bilgisayar Programlama
 BLG 1306 Temel Bilgisayar Programlama Öğr. Grv. M. Mustafa BAHŞI WEB : mustafabahsi.cbu.edu.tr E-MAIL : mustafa.bahsi@cbu.edu.tr Bilgisayar ile Problem Çözüm Aşamaları Programlama Problem 1- Problemin
BLG 1306 Temel Bilgisayar Programlama Öğr. Grv. M. Mustafa BAHŞI WEB : mustafabahsi.cbu.edu.tr E-MAIL : mustafa.bahsi@cbu.edu.tr Bilgisayar ile Problem Çözüm Aşamaları Programlama Problem 1- Problemin
OPTİMİZASYON TEKNİKLERİ. Kısıtsız Optimizasyon
 OPTİMİZASYON TEKNİKLERİ Kısıtsız Optimizasyon Giriş Klasik optimizasyon yöntemleri minimum veya maksimum değerlerini bulmak için türev gerektiren ve gerektirmeyen teknikler olarak bilinirler. Bu yöntemler
OPTİMİZASYON TEKNİKLERİ Kısıtsız Optimizasyon Giriş Klasik optimizasyon yöntemleri minimum veya maksimum değerlerini bulmak için türev gerektiren ve gerektirmeyen teknikler olarak bilinirler. Bu yöntemler
DOKUZ EYLÜL ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ MÜDÜRLÜĞÜ DERS/MODÜL/BLOK TANITIM FORMU. Dersin Kodu: MAT 5001
 Dersi Veren Birim: Fen Bilimleri Enstitüsü Dersin Türkçe Adı: Uygulamalı Matematik Dersin Orjinal Adı: Applied Mathematics Dersin Düzeyi:(Ön lisans, Lisans, Yüksek Lisans, Doktora) Lisansüstü Dersin Kodu:
Dersi Veren Birim: Fen Bilimleri Enstitüsü Dersin Türkçe Adı: Uygulamalı Matematik Dersin Orjinal Adı: Applied Mathematics Dersin Düzeyi:(Ön lisans, Lisans, Yüksek Lisans, Doktora) Lisansüstü Dersin Kodu:
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU
 METODU") ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
ALTIN ORAN ARAMA (GOLDEN SECTION SEARCH) METODU Tek değişkenli bir f(x) fonksiyonunu ele alalım. [Bazı x ler için f (x) bulunamayabilir.] Aşağıdaki DOP modelini çözmek istediğimizi var sayalım. Max f(x)
ISSN : 1308-7231 sherdem@selcuk.edu.tr 2010 www.newwsa.com Konya-Turkey BİR DC MOTORUN BULANIK MANTIK DENETLEYİCİ İLE KONTROLÜ
 ISSN:1306-3111 e-journal of New World Sciences Academy 2011, Volume: 6, Number: 2, Article Number: 1A0175 İlker Ali Özkan ENGINEERING SCIENCES İsmail Sarıtaş Received: November 2010 Saadetdin Herdem Accepted:
ISSN:1306-3111 e-journal of New World Sciences Academy 2011, Volume: 6, Number: 2, Article Number: 1A0175 İlker Ali Özkan ENGINEERING SCIENCES İsmail Sarıtaş Received: November 2010 Saadetdin Herdem Accepted:
KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I
 KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I 4.1. Dışbükeylik ve Uç Nokta Bir d.p.p. de model kısıtlarını aynı anda sağlayan X X X karar değişkenleri... n vektörüne çözüm denir. Eğer bu
KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I 4.1. Dışbükeylik ve Uç Nokta Bir d.p.p. de model kısıtlarını aynı anda sağlayan X X X karar değişkenleri... n vektörüne çözüm denir. Eğer bu
Deniz ERSOY Elektrik Yük. Müh.
 Deniz ERSOY Elektrik Yük. Müh. AMACIMIZ Yenilenebilir enerji kaynaklarının tesis edilmesi ve enerji üretimi pek çok araştırmaya konu olmuştur. Fosil yakıtların giderek artan maliyeti ve giderek tükeniyor
Deniz ERSOY Elektrik Yük. Müh. AMACIMIZ Yenilenebilir enerji kaynaklarının tesis edilmesi ve enerji üretimi pek çok araştırmaya konu olmuştur. Fosil yakıtların giderek artan maliyeti ve giderek tükeniyor
Güncel Sezgisel Arama Algoritmalarının Denetleyici Parametrelerinin Optimizasyonunda Başarım Kıyaslaması
 th International Advanced Technologies Symposium (IATS 11), 1-1 May 211, Elazığ, Turkey Güncel Sezgisel Arama Algoritmalarının Denetleyici Parametrelerinin Optimizasyonunda Başarım Kıyaslaması M. Kesler
th International Advanced Technologies Symposium (IATS 11), 1-1 May 211, Elazığ, Turkey Güncel Sezgisel Arama Algoritmalarının Denetleyici Parametrelerinin Optimizasyonunda Başarım Kıyaslaması M. Kesler
ANALYSİS OF THE EFFECTS OF DİFFERENT SLACK BUS SELECTİON ON THE OPTİMAL POWER FLOW
 FARKLI SALINIM BARASI SEÇİMLERİNİN OPTİMAL GÜÇ AKIŞI ÜZERİNDEKİ ETKİLERİNİN İNCELENMESİ Serdar ÖZYÖN Celal YAŞAR ÖZET Günümüzde enerjiye olan ihtiyacın artmasına bağlı olarak enerji sistemlerinin büyümesi,
FARKLI SALINIM BARASI SEÇİMLERİNİN OPTİMAL GÜÇ AKIŞI ÜZERİNDEKİ ETKİLERİNİN İNCELENMESİ Serdar ÖZYÖN Celal YAŞAR ÖZET Günümüzde enerjiye olan ihtiyacın artmasına bağlı olarak enerji sistemlerinin büyümesi,
OLASILIK ve KURAMSAL DAĞILIMLAR
 OLASILIK ve KURAMSAL DAĞILIMLAR Kuramsal Dağılımlar İstatistiksel çözümlemelerde; değişkenlerimizin dağılma özellikleri, çözümleme yönteminin seçimi ve sonuçlarının yorumlanmasında önemlidir. Dağılma özelliklerine
OLASILIK ve KURAMSAL DAĞILIMLAR Kuramsal Dağılımlar İstatistiksel çözümlemelerde; değişkenlerimizin dağılma özellikleri, çözümleme yönteminin seçimi ve sonuçlarının yorumlanmasında önemlidir. Dağılma özelliklerine
Akıllı Mekatronik Sistemler (MECE 404) Ders Detayları
 Ders Detayları") Akıllı Mekatronik Sistemler (MECE 404) Ders Detayları Ders Adı Akıllı Mekatronik Sistemler Ders Kodu MECE 404 Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Bahar 2 0 2 3 5 Ön Koşul Ders(ler)i
Akıllı Mekatronik Sistemler (MECE 404) Ders Detayları Ders Adı Akıllı Mekatronik Sistemler Ders Kodu MECE 404 Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Bahar 2 0 2 3 5 Ön Koşul Ders(ler)i
Uzaktan Algılama Teknolojileri
 Uzaktan Algılama Teknolojileri Ders 11 Hiperspektral Görüntülerde Kümeleme ve Sınıflandırma Alp Ertürk alp.erturk@kocaeli.edu.tr Sınıflandırma Sınıflandırma işleminin amacı, her piksel vektörüne bir ve
Uzaktan Algılama Teknolojileri Ders 11 Hiperspektral Görüntülerde Kümeleme ve Sınıflandırma Alp Ertürk alp.erturk@kocaeli.edu.tr Sınıflandırma Sınıflandırma işleminin amacı, her piksel vektörüne bir ve
Bulanık Mantık Hız Kontrolü Destekli Distance Transform Yol Planlama
 Bulanık Mantık Hız Kontrolü Destekli Distance Transform Yol Planlama Suat Karakaya 1, Gürkan Küçükyıldız 2, Hasan Ocak 3 Mekatronik Mühendisliği Bölümü Kocaeli Üniversitesi, Kocaeli 1 suat.karakaya@kocaeli.edu.tr
Bulanık Mantık Hız Kontrolü Destekli Distance Transform Yol Planlama Suat Karakaya 1, Gürkan Küçükyıldız 2, Hasan Ocak 3 Mekatronik Mühendisliği Bölümü Kocaeli Üniversitesi, Kocaeli 1 suat.karakaya@kocaeli.edu.tr
2) Lineer olmayan denklem çözümlerini bilir 1,2,4 1
 Lineer olmayan denklem çözümlerini bilir 1,2,4 1") DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Numerik Analiz BIL222 4 3+0 3 5 Ön Koşul Dersleri Yok Dersin Dili Dersin Seviyesi Dersin Türü Türkçe Lisans Zorunlu / Yüz Yüze Dersin
DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Numerik Analiz BIL222 4 3+0 3 5 Ön Koşul Dersleri Yok Dersin Dili Dersin Seviyesi Dersin Türü Türkçe Lisans Zorunlu / Yüz Yüze Dersin
SAYISAL ÇÖZÜMLEME Yrd. Doç. Dr. Adnan SONDAŞ Sayısal Çözümleme
 SAYISAL ÇÖZÜMLEME Yrd. Doç. Dr. Adnan SONDAŞ asondas@kocaeli.edu.tr 0262-303 22 58 1 SAYISAL ÇÖZÜMLEME 1. Hafta SAYISAL ANALİZE GİRİŞ 2 AMAÇ Mühendislik problemlerinin çözüm aşamasında kullanılan sayısal
SAYISAL ÇÖZÜMLEME Yrd. Doç. Dr. Adnan SONDAŞ asondas@kocaeli.edu.tr 0262-303 22 58 1 SAYISAL ÇÖZÜMLEME 1. Hafta SAYISAL ANALİZE GİRİŞ 2 AMAÇ Mühendislik problemlerinin çözüm aşamasında kullanılan sayısal
Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok
 Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
Gauss Yasası Bu bölümde Coulomb yasasının bir sonucu olarak ortaya çıkan Gauss yasasının kullanılmasıyla simetrili yük dağılımlarının elektrik alanlarının çok daha kullanışlı bir şekilde nasıl hesaplanabileceği
SAYISAL ÇÖZÜMLEME. Yrd.Doç.Dr.Esra Tunç Görmüş. 1.Hafta
 SAYISAL ÇÖZÜMLEME Yrd.Doç.Dr.Esra Tunç Görmüş 1.Hafta Sayısal çözümleme nümerik analiz nümerik çözümleme, approximate computation mühendislikte sayısal yöntemler Computational mathematics Numerical analysis
SAYISAL ÇÖZÜMLEME Yrd.Doç.Dr.Esra Tunç Görmüş 1.Hafta Sayısal çözümleme nümerik analiz nümerik çözümleme, approximate computation mühendislikte sayısal yöntemler Computational mathematics Numerical analysis
Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. BÖLÜM 7. Adi Diferansiyel Denklemlerin Sayısal Çözümü
 Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. BÖLÜM 7 Adi Diferansiyel Denklemlerin Sayısal Çözümü Copyright The McGraw-Hill Companies, Inc. Permission required
Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. BÖLÜM 7 Adi Diferansiyel Denklemlerin Sayısal Çözümü Copyright The McGraw-Hill Companies, Inc. Permission required
Hızlı Düzey Küme Yöntemine Bağlı Retinal Damar Bölütlemesi. Bekir DİZDAROĞLU. KTÜ Bilgisayar Mühendisliği Bölümü
 Bekir DİZDAROĞLU KTÜ Bilgisayar Mühendisliği Bölümü bekir@ktu.edu.tr 1/29 Tıbbi imge bölütleme klasik yaklaşımları a) Piksek tabanlı b) Kenar tabanlı c) Bölge tabanlı d) Watershed (sınır) tabanlı e) Kenar
Bekir DİZDAROĞLU KTÜ Bilgisayar Mühendisliği Bölümü bekir@ktu.edu.tr 1/29 Tıbbi imge bölütleme klasik yaklaşımları a) Piksek tabanlı b) Kenar tabanlı c) Bölge tabanlı d) Watershed (sınır) tabanlı e) Kenar
Muhammet Fatih AKBAŞ, Enis KARAARSLAN, Cengiz GÜNGÖR
 Yazılım Tanımlı Ağların Güvenliğinde Yapay Zeka Tabanlı Çözümler: Ön İnceleme Muhammet Fatih AKBAŞ, Enis KARAARSLAN, Cengiz GÜNGÖR İzmir Katip Çelebi Üniversitesi, Muğla Sıtkı Koçman Üniversitesi, Ege
Yazılım Tanımlı Ağların Güvenliğinde Yapay Zeka Tabanlı Çözümler: Ön İnceleme Muhammet Fatih AKBAŞ, Enis KARAARSLAN, Cengiz GÜNGÖR İzmir Katip Çelebi Üniversitesi, Muğla Sıtkı Koçman Üniversitesi, Ege
PID ve Bulanık Mantık ile DC Motorun Gerçek Zamanda STM32F407 Tabanlı Hız Kontrolü
 Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya PID ve Bulanık Mantık ile DC Motorun Gerçek Zamanda STM32F407 Tabanlı Hız Kontrolü Fatih Köse, Kaplan Kaplan, H. Metin Ertunç, Mekatronik
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya PID ve Bulanık Mantık ile DC Motorun Gerçek Zamanda STM32F407 Tabanlı Hız Kontrolü Fatih Köse, Kaplan Kaplan, H. Metin Ertunç, Mekatronik
HATA VE HATA KAYNAKLARI...
 İÇİNDEKİLER 1. GİRİŞ... 1 1.1 Giriş... 1 1.2 Sayısal Analizin İlgi Alanı... 2 1.3 Mühendislik Problemlerinin Çözümü ve Sayısal Analiz... 2 1.4 Sayısal Analizde Bilgisayarın Önemi... 7 1.5 Sayısal Çözümün
İÇİNDEKİLER 1. GİRİŞ... 1 1.1 Giriş... 1 1.2 Sayısal Analizin İlgi Alanı... 2 1.3 Mühendislik Problemlerinin Çözümü ve Sayısal Analiz... 2 1.4 Sayısal Analizde Bilgisayarın Önemi... 7 1.5 Sayısal Çözümün
Okut. Yüksel YURTAY. İletişim : (264) Sayısal Analiz. Giriş.
 Sayısal Analiz. Giriş.") Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
Evrimsel Algoritmalar Kullanarak Daha Düşük Dereceden Sistem Modeli Tasarımı Design of Lower Order System Model Using Evolutionary Algorithms
 2016 Published in 4th International Symposium on Innovative Technologies in Engineering and Science 3-5 November 2016 (ISITES2016 Alanya/Antalya - Turkey) Evrimsel Algoritmalar Kullanarak Daha Düşük Dereceden
2016 Published in 4th International Symposium on Innovative Technologies in Engineering and Science 3-5 November 2016 (ISITES2016 Alanya/Antalya - Turkey) Evrimsel Algoritmalar Kullanarak Daha Düşük Dereceden
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
DERS 5 : BULANIK MODELLER
 DERS 5 : BULANIK MODELLER Bulanık girişimli sistem, bulanık küme teorisi, bulanık if-then kuralları ve bulanık mantığına dayalı popüler bir hesaplama yapısıdır. Otomatik kontrol, veri sınıflandırılması,
DERS 5 : BULANIK MODELLER Bulanık girişimli sistem, bulanık küme teorisi, bulanık if-then kuralları ve bulanık mantığına dayalı popüler bir hesaplama yapısıdır. Otomatik kontrol, veri sınıflandırılması,
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım. Mehmet Ali Aytekin Tahir Emre Kalaycı
 Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım Mehmet Ali Aytekin Tahir Emre Kalaycı Gündem Gezgin Satıcı Problemi GSP'yi Çözen Algoritmalar Genetik Algoritmalar
Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım Mehmet Ali Aytekin Tahir Emre Kalaycı Gündem Gezgin Satıcı Problemi GSP'yi Çözen Algoritmalar Genetik Algoritmalar
GENETİK ALGORİTMALAR. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 GENETİK ALGORİTMALAR Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ GENETİK ALGORİTMALAR Genetik algoritmalar, Darwin in doğal seçim ve evrim teorisi ilkelerine dayanan bir arama ve optimizasyon yöntemidir.
GENETİK ALGORİTMALAR Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ GENETİK ALGORİTMALAR Genetik algoritmalar, Darwin in doğal seçim ve evrim teorisi ilkelerine dayanan bir arama ve optimizasyon yöntemidir.
TEMEL MEKANİK 4. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
MATEMATÝK GEOMETRÝ DENEMELERÝ
 NM 1 MTMTÝK OMTRÝ NMLRÝ 1. o o = 75 ve y = 5 olduğuna göre,. 3 + 8 = 0 sin( y)cos( + y) + sin( + y)cos( y) sin( y)sin( + y) cos( + y)cos( y) denkleminin kaç tane farklı reel kökü vardır? ifadesinin eşiti
NM 1 MTMTÝK OMTRÝ NMLRÝ 1. o o = 75 ve y = 5 olduğuna göre,. 3 + 8 = 0 sin( y)cos( + y) + sin( + y)cos( y) sin( y)sin( + y) cos( + y)cos( y) denkleminin kaç tane farklı reel kökü vardır? ifadesinin eşiti
ÇİMENTO BASMA DAYANIMI TAHMİNİ İÇİN YAPAY SİNİR AĞI MODELİ
 ÇİMENTO BASMA DAYANIMI TAHMİNİ İÇİN YAPAY SİNİR AĞI MODELİ Ezgi Özkara a, Hatice Yanıkoğlu a, Mehmet Yüceer a, * a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği Bölümü, Malatya, 44280 myuceer@inonu.edu.tr
ÇİMENTO BASMA DAYANIMI TAHMİNİ İÇİN YAPAY SİNİR AĞI MODELİ Ezgi Özkara a, Hatice Yanıkoğlu a, Mehmet Yüceer a, * a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği Bölümü, Malatya, 44280 myuceer@inonu.edu.tr