İNTERNET VE GPRS TABANLI SCADA SİSTEMİ İLE DC MOTORUN HIZ VE MOMENT KONTROLÜ. Yakup GÜNGÖR YÜKSEK LİSANS TEZİ ELEKTRİK EĞİTİMİ
|
|
|
- Emel Bulut
- 6 yıl önce
- İzleme sayısı:
Transkript
1 İNTERNET VE GPRS TABANLI SCADA SİSTEMİ İLE DC MOTORUN HIZ VE MOMENT KONTROLÜ Ykup GÜNGÖR YÜKSEK LİSANS TEZİ ELEKTRİK EĞİTİMİ GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ TEMMUZ 2010 ANKARA
2 Ykup GÜNGÖR trfındn hzırlnn İNTERNET VE GPRS TABANLI SCADA SİSTEMİ İLE DC MOTORUN HIZ VE MOMENT KONTROLÜ dlı bu tezin Yüksek Lisns tezi olrk uygun olduğunu onylrım. Prof. Dr. İsmil COŞKUN Tez Dnışmnı, Elektrik Eğitimi Anbilim Dlı. Bu çlışm, jürimiz trfındn oy birliği ile Elektrik Eğitimi Anbilim Dlınd Yüksek Lisns tezi olrk kbul edilmiştir. Prof. Dr. İsmil COŞKUN Elektrik Eğitimi, Gzi Üniversitesi. Yrd. Doç. Dr. Erdl IRMAK Elektrik Eğitimi, Gzi Üniversitesi. Yrd. Doç. Dr. Hmit ERDEM. Elektrik Elektronik Mühendisliği, Bşkent Üniversitesi Trih: 05/07/2010 Bu tez ile G.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu Yüksek Lisns derecesini onmıştır. Prof. Dr. Bill TOKLU Fen Bilimleri Enstitüsü Müdürü.
3 TEZ BİLDİRİMİ Tez içindeki bütün bilgilerin etik dvrnış ve kdemik kurllr çerçevesinde elde edilerek sunulduğunu, yrıc tez yzım kurllrın uygun olrk hzırlnn bu çlışmd bn it olmyn her türlü ifde ve bilginin kynğın eksiksiz tıf ypıldığını bildiririm. Ykup GÜNGÖR
4 iv İNTERNET VE GPRS TABANLI SCADA SİSTEMİ İLE DC MOTORUN HIZ VE MOMENT KONTROLÜ (Yüksek Lisns Tezi) Ykup GÜNGÖR GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ Temmuz 2010 ÖZET Günümüzde, sistemlerin uzktn denetimi ve sistem prmetrelerinin görsel olrk izlenmesi kontrol sistemlerinde en çok çlışıln konulrdn birisi hline gelmiştir. Bu tez çlışmsınd; uzktn denetim için kullnıln yöntemler rştırılmış, endüstri ve günlük yşmımızın bir prçsı hline gelmiş DC motorun hız ve moment kontrolü gerçek zmnlı olrk GPRS (Pket Anhtrlmlı Rdyo Hizmetleri Sistemi) kullnn Pocket PC (Cep bilgisyrı) ve internet tbnlı C# dilinde yzılmış oln SCADA (Kpsmlı ve Entegre Veri Tbnlı Kontrol ve Gözetleme Sistemi) sistemi ile sğlnmıştır. GPRS, internet ve SCADA protokollerinin sistem denetiminde hem zmn hem de mliyet çısındn büyük üstünlükler sğldığı gözlenmiştir. Bilim Kodu : Anhtr Kelimeler : GPRS, SCADA, hız ve moment kontrolü. Syf Adedi : 89 Tez Yöneticisi : Prof. Dr. İsmil COŞKUN
5 v SPEED AND TORQUE CONTROL OF DC MOTOR VIA INTERNET AND GPRS BASED SCADA SYSTEM (M.Sc. Thesis) Ykup GÜNGÖR GAZİ UNIVERSITY INSTITUTE OF SCIENCE AND TECHNOLOGY July 2010 ABSTRACT Nowdys, remote control of the systems nd visul monitoring of system s prmeters hve become one of the most studied topics in control systems. In this thesis study, the methods used for remote control hve been investigted, the rel time torque nd speed control of DC motor ws relized on the which becme prt of our dily life hs been done with Pocket PC using GPRS (Generl Pcket Rdio Service) nd internet bsed SCADA (Supervisory Control nd Dt Acqusition) system which ws written in C # lnguge. It ws observed tht the GPRS, internet nd SCADA protocols used in system control provided mny dvntges in both time nd cost. Science Code : Key Words : GPRS, SCADA, speed nd torque control Pge Number : 89 Adviser : Prof. Dr. İsmil COŞKUN
6 vi TEŞEKKÜR Çlışmlrım boyunc değerli yrdım ve ktkılrıyl ben yönlendiren Hocm Prof. Dr. İsmil COŞKUN, yine kıymetli tecrübelerinden fydlndığım hocm Yrd. Doç. Dr. Ali SAYGIN ve rkdşım Durmuş UYGUN, mnevi destekleriyle beni hiçbir zmn ylnız bırkmyn ileme teşekkürü bir borç bilirim.
7 vii İÇİNDEKİLER Syf ÖZET....iv ABSTRACT.....v TEŞEKKÜR....vi İÇİNDEKİLER... vii ÇİZELGELERİN LİSTESİ......x ŞEKİLLERİN LİSTESİ.....xi RESİMLERİN LİSTESİ....xiv SİMGELER VE KISALTMALAR... xv 1. GİRİŞ DC MOTORLARI Doğru Akım Motorlrının Ypısı Sttor Rotor Kolektör ve fırçlr DC Motorlrının Elektriksel Krkteristikleri DC Motorunun endüvi devresi modeli DC Motorunun güç-kım krkteristiği Moment-hız krkteristiği Güç kyıplrı ve verim DC Motorlrındn Hız ve Moment Kontrol Yöntemleri SCADA SİSTEMİ... 21
8 viii Syf 3.1. SCADA Kullnım Alnlrı SCADA Sistemlerinin Temel Ekipmnlrı GPRS (PAKET ANAHTARLAMALI RADYO HİZMETLERİ) GPRS Sisteminin Temel Özellikleri GPRS Kullnım Alnlrı ve GPRS ile Sistem Denetimi GPRS ve Mobil Tbnlı Sistem Denetimi SİSTEM TASARIMI Donnım Tsrımı Besleme devresi Ölçüm devresi Progrmlm ve kontrol devresi MOSFET sürücü devresi H-Köprü MOSFET konvertör devresi RS232 iletişim protokolü Yzılım Tsrımı Sunucu (Server) yzılımı İstemci (Client) yzılımı Cep telefonu (PDA) istemci yzılımı Yzılımlr rsı hberleşme veri ypısı DENEYSEL ÇALIŞMALAR Sbit DGM Ornınd (%80) Gerçekleştirilen Deneyler Sbit Yükte (100W) Değişken DGM Görev Sykılınd Gerçekleştirilen Deneyler... 56
9 ix Syf 6.3. PID (Ornsl-İntegrl-Türev) Kontrol ile Ypıln Deneyler PID (ornsl-integrl-türev) kontrol PID prmetrelerinin hesplnmsı PIC18F452 rcılığı ile PID kontrolünün gerçekleştirilmesi SONUÇ VE ÖNERİLER KAYNAKLAR EKLER EK-1 Sürücü devre EK-2 LEM kım sensörü EK-3 PIC18F452 mikroişlemci ktloğu EK-4 Motor sürücü PIC kynk kodu EK-5 IR2110 MOSFET sürücü entegresi EK-6 IRFP250 Güç MOSFET I ktloğu EK-7 PDA cep telefonund elde edilen ekrn değerleri ÖZGEÇMİŞ....89
10 x ÇİZELGELERİN LİSTESİ Çizelge Syf Çizelge 5.1. Motor çlışm doğruluk tblosu Çizelge 6.1. Sbit DGM de motorun çlışm değerleri Çizelge 6.2. Sbit yükte frklı DGM ornlrı için motorun çlışm değerleri Çizelge 6.3. Motor prmetreleri ve kynk kodu... 61
11 xi ŞEKİLLERİN LİSTESİ Şekil Syf Şekil 2.1. Srgılı DC motorunun ypısl gösterimi... 4 Şekil 2.2. Sbit mıkntıslı DC motorunun ypısl gösterimi... 5 Şekil 2.3. Sbit mıkntıslı DC motorlrınd kullnıln sbit mıkntıslr... 7 Şekil 2.4. Rotor ve rotor srgılrı... 7 Şekil 2.5. DC mkinelerinde kullnıln kolektör ve fırç örnekleri... 9 Şekil 2.6. DC motorun endüvi devresi modeli Şekil 2.7. DC seri motor endüvisinde üretilen gücün endüvi kımı ile değişimi Şekil 2.8. DC seri motorun endüvi kımı ile çıkış ve endüvi gücünün değişimi Şekil 2.9. DC seri motoru endüvi momenti-kımı ilişkisi Şekil DC seri motorun endüvi kımı-hız krkteristiği Şekil DC seri motorun frklı kynk gerilimleri için hız-moment krkteristiği Şekil 3.1. Gelişmiş bir SCADA mimrisi Şekil 3.2. PC tbnlı bir SCADA sisteminin ekipmnlrı Şekil 4.1. GPRS mimrisi Şekil 4.2. GPRS ile sistem denetim uygulmlrı Şekil 4.3. Mobil tbnlı denetimlerde kullnıln PDA cep telefonlrı ve PDA cep telefonlrı için geliştirilmiş örnek bir uygulm Şekil 4.4. Visul Studio 2005 ile geliştirilmiş bir PDA uygulmsı Şekil 4.5. Visul Studio 2005 Smrt Device PDA uygulmsı yzılım geliştirme ryüzü Şekil 5.1. Donnım blok ve sistem kış diygrmı Şekil V-15V besleme devresi... 35
12 xii Şekil Syf Şekil 5.3. Ölçüm devreleri Şekil 5.4. PIC18F452 ile tsrlnn progrmlm ve kontrol devresi Şekil 5.5. MOSFET sürücü devre bloğu Şekil 5.6. Klsik H-köprü konvertör devresi Şekil 5.7. H-köprü konvertör devresi Şekil 5.8. Seri kblo rcılığı ile bilgisyr-mikroişlemci rsındki veri lış-verişi Şekil 5.9. Sunucu yzılımı Şekil İstemci (client) yzılım r yüzü Şekil Windows CE 5.0 yzılım uygulmlrı için geliştirilmiş PDA uygulmsı Şekil Sistemin veri hberleşme ypısı Şekil Sunucu PC den motor sürücüsüne yollnn veri pketi Şekil Motor sürücüsünden sunucu PC ye yollnn veri pketi Şekil PC ler rsı veri hberleşme ypısı Şekil 6.1. DGM %80 iken motorun yüksüz olduğu durumd sunucu trfınd elde edilen çlışm grfikleri Şekil 6.2. DGM %80 iken motorun yüksüz olduğu durumd istemci trfınd elde edilen çlışm grfikleri Şekil 6.3. DGM %80 iken motorun %25 yüklü olduğu durumd sunucu trfınd elde edilen çlışm grfikleri Şekil 6.4. DGM %80 iken motorun %50 yüklü olduğu durumd sunucu trfınd elde edilen çlışm grfikleri Şekil 6.5. DGM %80 iken motorun %75 yüklü olduğu durumd sunucu trfınd elde edilen çlışm grfikleri... 55
13 xiii Şekil Syf Şekil 6.6. DGM %80 iken motorun nm yükünde sunucu trfınd elde edilen çlışm grfikleri Şekil 6.7. Sbit yükte (100W), %25 DGM de (Set Hız=255) elde edilen grfikler Şekil 6.8. Sbit yükte (100W), %50 DGM de (Set Hız=512) elde edilen grfikler Şekil 6.9. Sbit yükte (100W), %75 DGM de (Set Hız=767) elde edilen grfikler Şekil Sbit yükte (100W), %100 DGM de (Set Hız=1024) elde edilen grfikler Şekil PID kontrol blok diygrmı Şekil İstenilen zmn tepkisi Şekil Motorun istemci trfınd elde edilen PID i çlışm grfikleri... 62
14 xiv RESİMLERİN LİSTESİ Resim Syf Resim 5.1. Sistemde kullnıln donnımlrın genel görünümü Resim 6.1. Deney düzeneğinin (SCADA sisteminin) genel görünümü Resim 6.2. Deneyde kullnıln 1 kw lık LM mrk DC motorlrı ve tkogenertör Resim 6.3. Deneylerde sunucu olrk kullnıln dizüstü bilgisyr, istemci dizüstü bilgisyr ile istemci PDA cep telefonu Resim 6.4. Deneylerde yük olrk kullnıln 1 kw lık seri lmb düzeneği ve ölçü letleri... 51
15 xv SİMGELER VE KISALTMALAR Bu çlışmd kullnılmış tüm kısltmlr çıklmlrı ile birlikte şğıd sunulmuştur. Simgeler Açıklm d E g E c I f P 1 P P m P o P rot R R s T o V V T η ω ω 0 Kısltmlr A/D COM CPU D Görev sykılı Motord indüklenen gerilim, V Zıt elektromotor kuvveti, V Endüvi devresi kımı, A Aln kısı, Motor kyıplrı, W Endüvi devresine giren güç, W Motor trfındn sğlnbilecek en yüksek güç, W Net güç, W Dönel kyıplr, W Endüvi srgısı direnci, Ohm (Ω) Aln srgısı direnci, Ohm (Ω) Çıkış momenti, Nm Endüviye uygulnn gerilim, V Motor giriş gücü, W Verim Motor devir syısı, rd/s Boşt çlışm hızı, rd/s Açıklm Anlog/Dijitl Hberleşme Merkezi Güç Birimi Diyot
16 xvi DC D/A DGM DMS EMS ETSI GPRS GSM IP LAN MS MT PC PDA PI PIC PID RTD SCADA SMDAM SMS T TE TIA Doğru Akım Dijitl/Anlog Drbe Genişlik Modülsyonu Dğıtım Yönetim Sistemi Enerji Yönetim Sistemi Avrup Telekomüniksyon Stndrtlrı Enstitüsü Pket Anhtrlmlı Rdyo Hizmetleri Sistemi Mobil İletişim İçin Küresel Sistem İnternet Protokolü Yerel Aln Şebekesi Mobil İstsyonu Mobil Terminli Kişisel Bilgisyr Kişisel Syısl Yrdımcı Ornsl-İntegrl Kontrol Progrmlnbilir Entegre Devresi Ornsl-İntegrl-Türev Kontrolü Sıcklığ Duyrlı Direnç Kpsmlı ve Entegre Veri Tbnlı Kontrol ve Gözetleme Sistemi Sbit Mıkntıslı Doğru Akım Motorlrı Kıs Mesj Servisi Tristör Terminl Cihzı Telekomüniksyon Endüstrisi Birliği
17 1 1. GİRİŞ Teknolojinin hızl gelişmesi; özellikle cihz ve sistemlerin uzktn denetimine yönelik ypıln çlışmlrın hız kznmsın yol çmıştır. Kurulu bir sistemin çlıştırılıp durdurulmsı, önemli durumlrın tespiti ve bu durumlrd gerekli müdhlelerin gerçekleştirilmesi gibi sistem gereksinimlerinin krşılnmsınd çok frklı yöntemler kullnılmy bşlnmıştır. Cihz ve sistemlerin uzktn denetlenmesi mcıyl geliştirilen sistemlerde, denetim sistemi vey kontrolör ile kullnıcı rsındki hberleşmeyi sğlmd kullnıln yöntemlerdeki frklılıklr en dikkt çekici durumlrdn birisidir. Uzktn denetim sistemlerinde özellikle IP teknolojisinin gelişmesine prlel olrk en çok gelişme gösteren ve tercih edilen uygulm internettir. Son yıllrd internet ve internet tbnlı birçok uygulmnın yygınlşmsı uzktn denetimi ypılck sistemin kontrolünde birçok yeniliği ve bkış çısını berberinde getirmiştir. Bu uygulmlr; elektronik kıllı ev dı verilen ve evde bulunn hemen hemen her cihzın kontrolünü hedefleyen uygulmlrı içersinde brındırck seviyeye gelmiş durumddır [1]. Bu tez çlışmsı; uzktn kontrol edilen herhngi bir sistemin yrılmz bir prçsı hline gelmiş, özellikle küçük güçlü uygulmlrd tercih edilen doğru kım (DC) motorunun kontrolünü mçlmktdır. D.A motorunun kontrolü internet tbnlı olrk GPRS (Pket Anhtrlmlı Rdyo Hizmetleri Sistemi) kullnn Pocket PC (Cep bilgisyrı) ve internet tbnlı C# dilinde yzılmış oln SCADA (Kpsmlı ve Entegre Veri Tbnlı Kontrol ve Gözetleme Sistemi) sistemi ile sğlnmıştır. Denetimin mesfe kısıtlmsı olmksızın sğlnmsı mçlnmış ve iletişim knlı olrk günümüzde kullnımı oldukç rtn GPRS uyumlu bir cep bilgisyrı kullnılmıştır. Kullnıln cep bilgisyrı ve deney mçlı oluşturulmuş istemci yzılımı rcılığı ile sunucu bilgisyr bğlnılrk bu bilgisyr fiziksel olrk RS232 veri kblosu ile kuple oln ve tsrlnn sürücü devresi ile sürülen DC motor prmetreleri çevrimiçi görüntülenmekte ve motor it çlışm grfikleri zmn bğlı olrk incelenebilmektedir.
18 2 Bu tez çlışmsı toplm yedi bölümden oluşmktdır. İlk bölümde litertür çlışmsı ve tez çlışmsı hkkınd genel bilgiler verilmiş, tezin ikinci bölümünde çlışmnın donnımsl en önemli prçsı oln DC motorun it genel bilgiler verilmiş, motorun sürülmesinde kullnıln temel devreler ile uygulnn teknikler incelenmiştir. Tezin üçüncü kısmınd uzktn denetim temelleri ve SCADA (Kpsmlı ve Entegre Veri Tbnlı Kontrol ve Gözetleme Sistemi) sistemi hkkınd kıs bilgiler verilmiş ve tsrlnn sistemin temelde bsit bir SCADA sistemi özelliği tşıdığı ve genişletilebilir ğlr kolylıkl uygulnbilirliği üzerinde durulmuştur. Dördüncü kısımd tsrımın diğer bir boyutu oln GPRS (Pket Anhtrlmlı Rdyo Hizmetleri Sistemi) sistemi ve bu sistemi kullnn ve verileri bğımsız olrk sunucu sistemine ulştırıp DC prmetrelerinin görüntülenmesinde önemli bir yere ship oln cep telefonu ve yzılımı hkkınd kıs bilgiler verilmiştir. Beşinci kısımd ise sistemin tsrımı, etkileşimi ve çlışmsı üzerinde durulmuş ve frklı çlışm şrtlrı sürücü devre tepkileri ile yzılım rsındki etkileşim irdelenmiştir. Altıncı kısımd sistemin çlışmsı ile elde edilen sonuçlr ele lınmış, grfiklerde göze çrpn frklılıklr üzerinde durulmuş ve sürücü devre ile yzılımın etkinliği ktrılmıştır. Yedinci ve son bölümde ise sonuçlr krşılştırılrk çlışmnın bilime oln ktkısı üzerinde ve sistemin dh büyük ğlr uygulnbilirliği üzerinde durulmuştur.
19 3 2. DOĞRU AKIM (DC) MOTORLARI Doğru kım mkineleri koly kontrol edilebilme ve yüksek performns ship olm gibi önemli üstünlüklerinin ynınd kolektör ve fırçlrındn kynklnn meknik rız ve periyodik bkım gibi bzı istenmeyen zyıf yönlere de shiptir. Mikroişlemci ve güç elektroniğinde yşnn hızlı gelişmeler rtık kontrolü krmşık oln fırçsız tip mkinelerin kontrolünü mümkün kılmıştır. Doğru kım mkineleri motor vey genertör olrk çlışbilmesine rğmen hli hzırdki kullnımlrı hemen hemen sdece motor olrk gözükmektedir. Bun rğmen DC motorlr değişken hızlı sürücüler lnınd hl önemli bir yer işgl etmektedir [2]. Bunlrın endüstriyel kullnımı silindirli hdde mkineleri, vinçler, bzı mkine donnımlrı ve moment ve/vey hızın hsss kontrolünün gerektiği diğer uygulmlrı içerir. Bunlr ynı zmnd kü ile çlışn tşıtlr (süt dğıtıcısı) ve forklift ve demiryolu lokomotif çekicilerinde de kullnılır. Sbit mıkntıslı tip çoğu küçük DC motorlrı otomobillerde yygın olrk kullnılır. Yol verme motorlrı, cm sileceği motorlrı, pencere motorlrı, hvlı direksiyon motorlrı, pervne motorlrı ve diğer ksesurlrı süren motorlrın hepsi DC motorlrdır. Minytür DC motorlrının çoğu tşınbilen ve btry ile çlışn let ve prtlrd kullnım yeri bulmktdır. Sbit mıkntıslı DC motorlrınd (SMDAM) klsik doğru kım motorlrınd kullnıln ln srgılrı yerine sbit mıkntıslr bulunmktdır. Sbit mıkntıslr, elektrik mkinelerine ypı bkımındn önemli fydlr sğlmktdır. Bunlrın bşınd, mkineye gerekli oln mnyetik lnı üretmek için hrici bir uyrtım kynğın oln ihtiyç ve böylece uyrtımdn kynklnn güç kyıplrı ortdn klkmktdır. Sbit mıkntıslı mkinelerde ln srgılrı olmdığı için, serbest uyrtımlı emsllerine göre dh yüksek verime shiptirler ve dh z mlzeme kullnıldığı için dh z hcim kplyrk dh ucuz ml edilebilir. Sbit mıkntıslı DC motorlrı bhsedilen vntjlrının ynınd bzı dezvntjlr d shiptirler. Bunlr, motor srgılrınd oluşbilecek şırı kımlrın vey şırı

20 4 ısınmnın sonucu sbit mıkntısiyetin kybolm riski ve nm hızının üzerindeki çlışmlrd ln zyıfltmsının uygulnmmsıdır. Endüvi reksiyonunun kutup lnını zyıfltm etkisi, motor fren çlışmsınd dururken en yüksek değerine ulşır. SMDAM tsrlnırken, ekonomik olmsı d dikkte lınrk, endüvi reksiyonunun olumsuz etkisi en z indirgenebilir Doğru Akım Motorlrının Ypısı Doğru kım motoru sttor ve rotordn oluşur. Sttor; sbit mıkntıslı olmsının ve sbit mıkntıslrı tşımsının ynınd mıkntıslnmyı meydn getiren kutuplrı ve kutup srgılrını d tşıybilmektedir. Rotor ise indüklenen gerilimi üretmek için endüvi srgısını tşımktdır. Bu çlışmd kullnıln DC mkinesi kutup srgılı olmsın rğmen bu kısımd hem srgılı hem de sbit mıkntıslı mkineler ele lıncktır. Şekil 2.1. Srgılı DC motorunun ypısl gösterimi

21 5 Şekil 2.2. Sbit mıkntıslı DC motorunun ypısl gösterimi Sttor Sttor hreket etmeyen kısımdır. Genel olrk gövde, n kutuplr, srgılr ve yrdımcı kutuplrdn oluşur. Şekil 2.1 ve 2.2 de DC motorunun sttorun it gösterimler verilmiştir. Sttoru oluşturn prçlrı şu şekilde sırlmk mümkündür: Sttor Boyunduruğu Sttor boyunduruğu mkinenin mnyetik devresinin gövde ile kutuplr rsınd kln prçsın verilen ddır. Kutuplrd üretilen kının mnyetik devresini tmmlmsı için kullndığı yoldur. Böylece iki kutbu birbirine mnyetik olrk bğlr. Kutuplr Doğru kım mkinesinde kullnıln kutuplrın iki değişik türü bulunmktdır.
22 6 Bunlrdn birincisi sttoru srgılı DC motorlrınd kullnıln n kutuplrdır. An kutbun iki yrı prçsı bulunmktdır. Bunlr kutup gövdesi ve kutup yğıdır. Kutup gövdesi kutup srgılrının monte edildiği kısım olup mlzemesi dökme çelik vey 0,5 1,0 mm klınlığınd silisli scdır. Kutbun dökme çelikten iml edilmesi hlinde kesiti elips, silisli sc pketi oluşturulrk iml edilmesi hlinde ise kesiti dikdörtgen olrk ypılır. Kutup yğı ise, kutup gövdesinin ltınd rotor bkn trft yer lır. Mlzemesi silisli scdır. Dökme çelik vey demir burd kullnılmz. Çünkü endüviden dolyı oluşn mnyetik ln, hv rlığının küçük olmsındn dolyı kutup yklrının içinden geçer. Burd demir kyıplrını meydn getirir. Kutup yklrı kutuplrd üretilen mnyetik kının hv rlığın geçmesini sğlyn r prçdır. Bir kutup ltındki bölgede hv rlığı kısının sinüs şeklinde dğılmsını sğlmk için, kutup yklrın özel olrk şekil verilir [3-4]. Sttoru srgılı DC motorlrınd kullnıln diğer bir kutup türü yrdımcı kutuplrdır. Yrdımcı kutuplr endüvi reksiyonunun etkisini yok etmek için kullnılırlr ve sttord iki n kutup rsın ve gövdeye monte edilirler. Endüvi kımının meydn getirdiği mnyetik lnın bir kısmı yrdımcı kutup yklrındn geçer ve fuko kımlrı indükler. Meydn gelebilecek demir kybını zltmk mcıyl, özellikle büyük güçlü mkinelerde sc pket olrk d iml edilebilirler. Yrdımcı kutuplrın doymmsı ve değişen yük koşullrınd gerekli ters mper-srımı üreterek endüvi lnının bozucu etkisini yok etmesi ve küçültmesi gerekmektedir. Sbit mıkntıslı DC motoru mıkntıslı tip olduğu için sttor ypısı bsit ve sdece sbit mıkntıslrdn oluşmktdır. Klsik mıkntıslı bir DC motorund kullnıln sbit mıkntıs tipi şğıd görülmektedir.



23 7 Şekil 2.3. Sbit mıkntıslı DC motorlrınd kullnıln sbit mıkntıslr Rotor Doğru kım mkinesinde dönen rotor ve meknik enerjinin lındığı kısım endüvi denir. Rotor ve rotor srgılrın it şekiller şğıd görülmektedir. Endüvide lterntif kım indüklendiğinden, bunun ürettiği mnyetik ln zmn göre değişir ve mnyetik devrede demir kyıplrın neden olur. Bu kyıplrı zltmk için endüvinin mnyetik devresi 0,5 1,0 mm klınlığınd rlrınd hv boşluğu bulunn silisli sc plklrdn ypılır [3]. Böylece bu hv ile demirin soğumsı sğlnır. Rotor çpı büyük olduğu zmn eylemsizlik momentinin şırı büyümesi problemi orty çıkr. Rotorun çevresi prçlr bölünür ve dire yyı şeklinde iml edilirler. Bu prçy segmn denir. Eylemsizliğin küçültülmesi için rotor oluklrı sc segmn üzerine çılır. Şekil 2.4. Rotor ve rotor srgılrı
24 8 Sc segmnlrın dış çpı rotor dış çpın eşit, iç çpı ise hesplnn rotor boyunduruk yüksekliği kdr dh küçük ypılır. Ortsı boş olduğundn çemberin ğırlığı d zltılmış olur. Rotor hızlı döndüğü için, rotor srgılrı rotorun yüzeyinde çıln oluklr ksiyl eksen boyunc yerleştirilir. Srgılrd indüklenen lterntif kımın doğru kım çevrilmesi için mil üzerine monte edilen kolektör fırç sistemi kullnılır. Endüvi Srgılrı Mnyetik lnın yrtılbilmesi için bir bobinden kım geçirmek gerekir. Bir iletkenden geçirilen elektrik kımının iletkenin etrfınd yrttığı mnyetik ln; iletken syısın ve içinden geçen kım bğlıdır. Bu mper-iletken olrk bilinir. Sbit kımd mper-iletkenin rttırılmsı için iletken syısı rttırılır. Rotor bu mçl srıln iletkenlere srgı denir. Akımın sürekliliği için gerilim kynğındn bşlyıp, yine gerilim kynğınd son eren, birbirine seri bğlı iletkenden meydn gelen bu oluşum srım denir. Kuvvetli bir mnyetik ln için rotordki srgılrın srım syısı yüksek olmlıdır. Mnyetik lnın büyütülmesi için mper-srım miktrının büyütülmesi gerekir. Bu nedenle çok syıd srım ihtiv eden, bobinler meydn getirilir. Bu d yetersiz klırs bobin syısınd rtış ypılır. Srımlrdn oluşn bobini sttor sc pketine yerleştirmek için çevrede iki det oluğ ihtiyç vrdır. Bu oluklrdn birinin içine bobinin bir yönde kım tşıyn iletken topluluğu, diğerinin içine ise bobinin ters yönde kım tşıyn iletken topluluğu konur. İletkenler sc pketin ksiyl ekseni boyunc yerleştirilmektedir Kolektör ve fırçlr Kolektör, bkır dilim y d lmellerden ypılır. Lmeller merkezkç kuvveti etkisi ile yerinden fırlmsın engel olmk için kırlngıçkuyruğu biçimindedir. Birbirine ve mkinenin rotor çekirdeğine göre belirli gerilimleri oln kolektör lmelleri,


25 9 birbirlerinden mik gibi bir ylıtkn ile yrılmıştır. Mkinenin mili ve gövdesinden de gene ynı y d benzer bir ylıtknl ylıtılmıştır. Kolektör dilimleri byrkçıklrın, rotor oluklrın yerleştirilen bobinlerin uçlrın bğlnır. Genelde kolektör çpı rotor çpındn dh küçüktür. Fırçlr kolektörle kım lış-verişi ypn prçlrdır. Konum olrk kolektör üstünde geometrik nötr eksen üzerine yerleştirilirler. Çünkü geometrik nötr eksen üzerinde mnyetik ln yoğunluğu sıfırdır. Fırç mlzemesi sert krbon grfit, elektro-grfit dışınd metl tozlrının krbon ktkısıyl elde edilir. Sert krbon fırçlr düşük kolektör hızınd ve küçük kım yoğunluklrınd yni küçük güçlü, yüksek gerilimli uygulmlrd; grfit fırçlr sert krbon göre dh büyük kolektör hızınd ve kım yoğunluklrınd geniş çpt kullnılır. Elektro-grfit fırçlr çok dh büyük kolektör hızlrınd ve kım yoğunluklrınd çlışır. Metl fırçlr ise çok düşük gerilimlerde ve çok büyük kım yoğunluklrınd kullnıln, gerilin düşümü çok küçük oln fırçlrdır. Bir mkinede kullnıln fırç syısı endüvi srgısının türüne göre ve kutup syısın göre değişir. Bsit dlglı srgıd kutup syısın bğlı olmksızın iki tnedir. Fırç kesiti, kullnılmsı plnlnn fırç çifti syısı kdr küçülür. Srgının bsit bükümlü olmsı durumund fırç syısı kutup syısın eşittir. Şekil 2.5. DC mkinelerinde kullnıln kolektör ve fırç örnekleri
26 DC Motorlrının Elektriksel Krkteristikleri Doğru kım motoru; doğru kım elektrik enerjisini meknik enerjiye çeviren bir elektrik mkinesidir. DC motorlrı genertör olrk t çlışbilmektedir. Çünkü ypılrı ynıdır. Bu yüzden DC genertör leri için uygulnn modeller motor için de uygulnbilir. Model dikkte lındığınd frklılık temel endüvi gerilimindedir. Genertör durumund endüvinin ürettiği indüklenen gerilim (E g ), motor durumund endüvide meydn gelen zıt elektromotor kuvveti (E c ) olrk dlndırılır. Hesplmlrd geçen R değeri endüvi srgısını, R s değeri ln srgısını ifde etmektedir DC Motorunun endüvi devresi modeli DC motorun endüvi devresi şğıdki model ile temsil edilir. Şekil 2.6. DC motorun endüvi devresi modeli Endüviye uygulnn gerilim (V ); zıt emk (E c ), endüvi srgısı direnci (R ) ile temsil edilirse, kplı devre gerilim denklemi; V Ec I R (2.1) kullnılrk endüvi kımı hesplnır. Zıt emk; ln kısı ve endüvi çısl hızı ω vey devir syısı n ile değişir.
27 11 E c K1 f (2.2) K 1 sbiti; endüvideki iletken syısı, kutup syısı gibi mkine prmetrelerine bğlıdır. Motor dururken, motor devir syısının ω=0 ve böylece yol lm bşlngıcınd motor zıt emk'nın E c =0 olduğu görülür. V geriliminin zltılmış bir değeri endüviye uygulnmzs yol lm bşlngıcınd endüvi kımı çok yüksek olcktır. Bu durum önem verilmeli ve dikkt edilmelidir. Endüvi devresine giren güç; P V I (2.3) endüvi güç kyıplrını ve endüvi gücünü krşılr. P i I 2 R P (2.4) Endüvide üretilen güç P ; P E c I (2.5) Net çıkış gücü (P o ) ise endüvi gücünden döner kyıplrın (P rot ) çıkrılmsı sonucu elde edilir. P0 P P rot (2.6) Net çıkış gücü motor milinden elde edilen güçtür. Newton metre (Nm ) olrk çıkış momenti;
28 12 T 0 P 0 (2.7) Denkleminden hesplnır. Burd ω çısl hızdır ve birimi rd/s dir DC Motorunun güç-kım krkteristiği Endüvide üretilen güç; P E I (2.8) c olrk verilir. Eşitlikte E c değeri yerine konulurs; P [ V I ( R R )] I (2.9) T s elde edilir (R s =0). Belirli terminl geriliminde ve mkine prmetrelerinde endüvide üretilen güç endüvi kımı ile ikinci dereceden bir prbolik olrk değişir. Verilen P gücüne göre denklem 2.9 un I için iki çözümü vrdır. Eşitlik yeniden düzenlenerek 2 ( R R ) I V I P 0 hline getirilir. I nın çözümü için; s T I 2 VT VT 4P ( R Rs ) (2.10) 2( R R ) s eşitliği elde edilir. Bu eşitlikte endüvi gücünün sdece bir değerinde I 'nın bir çözümü vrdır. Bu şrtlr krekök içindeki terimlerin sıfır olmsını gerektirir. V T 2-4P (R + R s )=0 için motor trfındn sğlnbilecek en yüksek güç; P m 2 VT (2.11) 4( R R ) s
29 13 olur ve bu güce krşılık endüvi kımı; I m VT (2.12) ( R R ) 2 s olrk bulunur. Bu eşitliğin doğruluğunu göstermek için denklem 2.9 un I kımın göre türevi lınıp, sıfır eşitlenirse; P I V T 2( R R ) I 0 s (2.13) elde edilen sonuç Eş yi verir. DC motorun çlışm rlığı mksimum endüvi gücünden oldukç şğıddır. Motorun norml çlışm bölgesinde Eş. 2.10'd krekök işreti negtif lınır. I 2 VT VT 4P ( R Rs ) (2.14) 2( R R ) s Şekil 2.7. DC seri motor endüvisinde üretilen gücün endüvi kımı ile değişimi [3]. Eş. 2.9'd endüvi direnci ihml edilirse, I kımının yklşık bir değeri;
30 14 I P V T (2.15) olrk hesplnır. Bu bsit ve kullnışlı kım eşitliği çok krışık oln Eş ten dh düşük bir kım değeri verir. Fkt düşük P güçlerinde kım htsı çok zdır. DC motorun endüvi ve çıkış gücünün endüvi kımı ile değişimi şğıdki şekilde çizilmiştir. Şekil 2.8 DC seri motorun endüvi kımı ile çıkış ve endüvi gücünün değişimi [3]. Motorun çıkış vey mil gücü endüvide üretilen güçten döner kyıplrın çıkrılmsı ile elde edilir Moment-hız krkteristiği Endüvide üretilen moment (iç moment); T P (2.16) Eş. (2.13) ve (2.14) kullnılrk 2 1K 2I T K (2.17)
31 15 elde edilir. Şekil 2.9 d görüldüğü gibi sbit mıkntıslı DC motord kutup lnı sbit olduğu için kım-moment krkteristiği doğrusldır. V T K K I I ( R R ) (2.18) 1 2 s Şekil 2.9. DC seri motoru endüvi momenti-kımı ilişkisi [3]. Endüvi kımı terimleri ile çısl hız; V R R (2.19) K T s 1K 2I K1K 2 olrk ifde edilebilir. Denklem 2.19 endüvi kımının küçük bir değerinde bile motorun çok yüksek devir ypbildiğini gösterir. Bu sebepten motor yüksüz iken çlıştırılırs motor devir syısı çok şırı yükselir ve tehlikeli durumlr meydn gelebilir. Şekil DC seri motorun endüvi kımı-hız krkteristiği [3].
32 16 DC motorun endüvi kımı-hız ilişkisi yukrıdki şekilde gösterilmiştir. DC motorun hız-moment krkteristiği y kynk gerilimi y d endüvi devresi direnci değiştirilerek kontrol edilebilir. Motoru besleyen kynk gerilimi değiştirildiği tkdirde motorun boşt çlışm hızı (ω 0 ) değişir nck, hız-moment krkteristiğinin eğimi değişmez. Frklı kynk gerilimleri için elde edilen hız-moment krkteristiklerinin eğimleri şekilde görüldüğü gibi ynıdır. Eş. 2.19'dn endüvi kımı, çısl hız ile tnımlnbilir. I VT K K ( R R 1 2 s ) (2.20) Eş. 2.20, Eş. 2.18'de yerine konulurs; T 2 K1K 2VT [ K1K 2 ( R Rs )] 2 (2.21) m T Şekil DC seri motorun frklı kynk gerilimleri için hız-moment krkteristiği [3]. Elde edilen eşitlik DC motorunun moment-hız krkteristiğini verir ve Şekil 2.11'de gösterilmiştir. Grfik üzerinde frklı gerilim seviyeleri için motor momenti ile hız rsındki değişim de izlenebilmektedir.
33 Güç kyıplrı ve verim Bir DC motorunun giriş gücü şğıdki gibi ifde edilir: P V in T I (2.22) Motor içindeki güç kyıplrı; endüvi ln dirençlerinin kyıplrı, döner kyıplr (P rot ) olrk syılbilir. Bun göre kyıplr; 2 1 I ( R Rs ) Prot (2.23) P olrk yzılır. Çıkış gücü ise motor giriş gücünden P 1 güç kyıplrının çıkrılmsı sonucu; P o P (2.24) in P 1 olrk ifde edilir. Motor verimi; P 0 P in (2.25) Motor verimi, endüvi kımı ve dolyısıyl motor yüküyle değişir. Endüvi kımı rttıkç mksimum verime ulşıncy kdr verim de rtr. Akımın dh fzl rtırılmsıyl verim düşer. Mksimum verime krşılık gelen endüvi kımını bulmk için endüvi kımın göre verimin türevi sıfır eşitlenir. d di 0 P0 Pin ( di P ) Po ( I in ) =0 (2.26)
34 18 Eş kullnılırs; P P P P 1 in ) _( P ) in P 0 I I in in ( 1 I (2.27) ve bsitleştirilirse; P in P I in Pin P1 I (2.28) hline getirilir. Gerekli türevlerin sonuçlrı; P1 I 2I ( R R s ) ve P I in V T (2.29) elde edildikten sonr, mksimum verim için şrt; 2V I T 2 ( R 2 R ) V [ I ( R R ) P ] (2.30) s T s rot sğlnır ve eşitlik bsitleştirilirse, döner kyıplrı veren P rot ifdesine erişilir. Döner kyıplr olrk temsil edilen sbitlenmiş kyıplr ve I 2 R ile temsil edilen srgı kyıplrı birbirine eşit olduğund verim mksimum olur. Böylece; I P rot, mx (2.31) R Rs Verimin mksimum değeri; mx P in,mx P 2P in,mx 1 (2.32)
35 19 vey 1 2 Prot ( R Rs )] 2[ mx 1 (2.33) V T olrk hesplnır. Yukrıdki gelişmelerden şu sonuç çıkrtılbilir. Mksimum verim; döner kyıplrın, endüvi direnci ile terminl (uç) geriliminin fonksiyonudur. Motorun mksimum verim değeri terminl gerilimin rtırılmsı vey endüvi direncinin zltılmsı ile rtırılbilir. Kullnıln motord seri ln direnci bulunmdığındn hesplmlrın endüvi direncinin zltılmsı yönünde ypılmsı gerekmektedir DC Motorlrındn Hız ve Moment Kontrol Yöntemleri Doğru kım motorlrı, değişken koly hız değiştirme özelliklerine ship olduğundn hızın ve momentin kontrol edilmesi istenen yerlerde kolylıkl tercih edilebilmektedirler. Yüksek yol lm momenti sğldığındn, hız kontrolü geniş rlıklrd ypılır. Hız kontrolü lterntif kım motorlrın göre dh koly ve dh ucuzdur. Kontrollü doğrultuculr, sbit lterntif gerilimden değişken doğru kım gerilimi elde ederken, kıyıcılr ise sbit doğru kım gerilimi değişken doğru kım gerilime çevirir. DC motorun hızı şğıdki yöntemlerle yrlnbilir. Endüvi devresi direncini (R) değiştirerek Uyrm kımını (I) değiştirerek Wrd-Leonrd sistemi ile Yrıiletkenler kullnılrk DGM (Pulse Width Modultion - Drbe Genişlik Modülsyonu) ile Bhsedilen yöntemlerde ilk üçü eski ve kullnım shlrı gittikçe zln yöntemler olduğu için tez çlışmsınd bhsedilmemiştir. Son yıllrd teknolojinin gelişmesine
36 20 prlel olrk gelişen yrı iletken teknolojisi ve kbinde kullnılmy bşlnn drbe genişlik modülsyon tekniği tez çlışmsının kontrol nlmınd temelini oluşturcktır. Bunun ynınd motorlrın moment kontrolünde de temel olrk iki yöntem kullnılmktdır: Sbit hız değişken moment kontrolü Değişken hız sbit moment kontrolü Çlışmd, PID kontrollü denetim sistemi tercih edildiği için motor hızı belirli bir düzeyde sbit tutulmy çlışılmış dolyısı ile yükle birlikte motorun çektiği kım bğlı olrk çıkış gücü ve çıkış momenti otomtik olrk değiştirilmiştir. Dolyısı ile çlışmd tercih edilen moment kontrol yöntemi sbit hızd değişken moment kontrolüdür.
37 21 3. SCADA SİSTEMİ SCADA terimi İngilizce Supervisory Control nd Dt Acqusition kelimelerinin ilk hrfleri bir ry getirilerek oluşturulmuş, süreçler için Gözetleyici Denetim ve Veri Toplm işlevlerini yerine getiren yzılım sistemleri için kullnılmktdır [7, 8]. Dh detylı olrk SCADA Sistemleri için, endüstriyel otomsyon sistemlerinde fbriknın iletişim ltypısı ve bilgi omurgsını oluşturn Gözetleme, Denetim ve Veri İşlemleri yzılımlrı olrk tnımlnbilir. Günümüzdeki SCADA Sistemlerini bilgisyr sektöründeki gelişmeleri ykındn tkip ederek, endüstriyel tesislerin tesis içi ve dışı her türlü hberleşme ve denetiminden sorumlu denetim ve iletişim yzılımı olrk tnımlmk dh doğru olmktdır. SCADA yzılım pketleri endüstriyel tesislerde ltypı yzılımı görevini görmekte şirket içi ve dışı ğlrın birbirine ve fbriknın tüm ktmnlrın kolylıkl bğlnmsını sğlmktdır. SCADA yzılımı Çizelgeleme, Üretim Yönetimi, Üretim Denetimi, Hücre Kontrolü ve Ekipmn Kontrolü seviyeleri rsındki veri lışverişini yeni rbirim yzılımlrı geliştirilmesine gerek klmdn sğlmktdır. Özetle, merkezi izleme sistemi, grfik kullnıcı r yüzleri, yerel denetim desteği için rçlr, dğıtılmış uygulmlrın bütünleşmesi, bilginin işlenmesi görevlerini üstlenir [9]. Genel olrk üstlendiği görevleri ve fydlrını şu bşlıklr ltınd toplmk mümkündür. Kullnıcı trfındn tnımlnmış işletmeye it prmetreler (seviye, sıcklık, bsınç, dijitl sinyller, vn ve motor durumlrı, sistem durumu vb.) vsıtsıyl işletmenin tkibi, Reçete ekrnlrı vsıtsıyl, üretim reçetelerinin girilmesi ve işleyen reçeteler hkkınd opertörün bilgilendirilmesi, Prmetre ekrnlrı vsıtsıyl, sistem için gerekli oln limit değerlerin (setpoint, lt ve üst lrm değerleri) girilmesi, P, I, D prmetrelerinin girilebilmesi ve gözlenmesi,
 lınmsı, Otomtik çlışn sisteme, SCADA ekrnlrındn elle müdhle imkânı, Alrm ve durumlrın gösterilmesi ve yzıcıy ve/vey veri tbnın kyıt edilmesi, İleri düzeyde klite kontrol (örneğin isttistiksel")
38 22 İşletme değerlerinin trihsel ve gerçek zmnlı eğilimlerinin tutulmsı, Anlık ve periyodik rporlrın (üretim, reçete, stok vb.) lınmsı, Otomtik çlışn sisteme, SCADA ekrnlrındn elle müdhle imkânı, Alrm ve durumlrın gösterilmesi ve yzıcıy ve/vey veri tbnın kyıt edilmesi, İleri düzeyde klite kontrol (örneğin isttistiksel proses kontrol) desteği. Şekil 3.1 de gelişmiş bir SCADA mimrisi görülmektedir. Şekil 3.1. Gelişmiş bir SCADA mimrisi
39 SCADA Kullnım Alnlrı SCADA sistemleri; sistem opertörlerine, merkezi bir kontrol noktsındn geniş bir coğrfi ln yyılmış petrol ve gz lnlrı, boru sistemleri, su şebekeleri, termik ve hidrolik enerji üretim sistemleri ile iletim ve dğıtım tesisleri gibi lnlrd vnlrı, kesicileri, yırıcılrı, nhtrlrı uzktn çıp kpm, yr noktlrını değiştirme, lrmlrı görüntüleme, ölçü bilgilerini toplm işlevlerini güvenilir, emniyetli ve ekonomik olrk yerine getirme vntjı sunmktdır [10]. SCADA sisteminin birçok kullnım lnı vrdır. Geniş bir coğrfi ln yyılmış, bölgesel ve yerel tesislerin birçoğund kullnılmktdır. Bşk sistemlere de lt ypı teşkil etmektedir. SCADA sistemine ilve işlevler eklenerek ENERJİ YÖNETİM SİSTEMLERİ ( EMS-Energy Mngement System ) vey DAĞITIM YÖNETİM SİSTEMLERİ (DMS-Distribution Mngement System) gibi sistemler oluşturulur [9-11]. SCADA sisteminin bşlıc kullnım lnlrı şunlrdır; Kimy Endüstrisi Doğl Gz ve Petrol Boru Htlrı Petrokimy Endüstrisi Demirçelik Endüstrisi Elektrik Üretim ve İletim Tesisleri Elektrik Dğıtım Tesisleri Su Toplm, Arıtm ve Dğıtım Tesisleri Hv Kirliliği Kontrolü Çimento Endüstrisi Otomotiv Endüstrisi Trfik Kontrolü Gıd Endüstrisi Bin Otomsyonu
40 SCADA Sistemlerinin Temel Ekipmnlrı En bsit hliyle SCADA sisteminde fiziksel bir büyüklüğün ölçülmesi, ölçülen büyüklüğe it sinylin tşınmsı, işlenmesi ve değerlendirilmesi şmlrı mevcuttur. PC tbnlı bsit bir SCADA kontrol sistemi şğıdki şekilde görüldüğü gibi fiziksel sistem, lgılyıcı ve kontrol elemnlrı, sinyl işleme, veri toplm, kontrol donnımı ve bilgisyr yzılımı kısımlrdn oluşmktdır [7-12]. Bilgisyr ÖLÇÜM Kullnıcı VERİ TOPLAMA ve KONTROL Sinyl Algılyıcı KONTROL Yzılım (Visul C#) Şekil 3.2. PC tbnlı bir SCADA sisteminin ekipmnlrı Fiziksel Sistemler Bir SCADA sistemi, gerçek düny üzerinde krşılnn olylrı (sıcklık, bsınç, hız, seviye vb.) bilgisyr ktrır, burd oluşturuln snl ortmd gerekli işlemleri yürüttükten sonr fiziksel sistemlere müdhle eder. Burd lgılyıcılr fiziksel olylrı, elektriksel bilgiye (nlog) dönüştürür. Bu noktd SCADA donnımı nlog voltjı D/A (dijitl/nlog) çeviriciler yrdımıyl dijitl bilgiye dönüştürür ve bilgisyr ktrır. Fiziksel sistemlerdeki olylr D/A gerekmeksizin kolyc bilgisyr ktrbilirler. Bilgisyr benzer şekilde dijitl ve nlog çıkışlr üreterek fiziksel sistemleri kontrol eder.
41 25 Algılyıcı ve Kontrol Elemnlrı Algılyıcılr, sıcklık, bsınç, hız, konum gibi fiziksel bilgileri voltj, kım, frekns, puls gibi elektriksel sinyle dönüştürür. (Termokupl vey RTD elemnlrı vb.). Kontrol elemnlrı fiziksel sistemleri hrekete geçiren elemnlr olup süreç kontrolü sğlrlr. Sinyl İşleme Sinyl işleme elemnlrı, lgılyıcı trfındn üretilen sinyllerin A/D ye girmeden önce klitelerini rtırmy yrr. Sinyli ölçeklendirme, lineerleştirme, filtreleme, yükseltme gibi işlemlerin hepsi bu mc yöneliktir. PC tbnlı sistemlerde en yygın olnı yükseltmedir (genliği rttırm). Böylece filtreleme, lineerleştirme gibi işlemler yzılım ile kolyc çözülebilmektedir. Veri Toplm ve Kontrol Donnımı Kontrol donnımı genelde şğıd sırlnn üniteleri bulundurn ve PC nin tşıyıcı elemnlrın yerleştirilen krtlrdır. Bu üniteler; CPU, işletim sistemi nlog giriş ve çıkış syıcı ve zmnlyıcı ünite, progrmlnbilir yükseltici, bellek ve tmpon bellektir. Yzılım Uygulmy göre doğru yzılım seçilmesi de donnımın doğru seçilmesi kdr önemlidir. Uygulmnın hız gereksinimi, özellikleri, progrmın esnekliği yzılım seçiminde önemli kıstslrdır. SCADA yzılım pketleri, Windows NT nin bilgisyr işletim sistemi olrk yygın kbul görmesinden sonr ğırlıklı olrk NT işletim sisteminin özelliklerini kullnrk geliştirilmeye bşlndılr. Bilgisyr teknolojisinin hızl gelişmesine prlel olrk şu nd birçok işletim sisteminde çlışmktdır. Tsrlnn sistemin uygulnmsınd; hem istemci, hem cep telefonu hem de sunucu yzılımınd Visul C# uygulmsı tercih edilmiştir.
42 26 4. GPRS (PAKET ANAHTARLAMALI RADYO HİZMETLERİ) GPRS (Generl Pcket Rdio Service), verilerin mevcut GSM şebekeleri üzerinden sniyede 28,8 ilâ 115 kilobit'lik hızlrd iletilebilmesine imkân veren, cep telefonu ve mobil cihz kullnıcılrın kesintisiz internet bğlntısı sunn pket tbnlı (pcket-bsed) bir mobil iletişim servisidir [13-16]. GPRS; çğın gelişmesi ile birlikte her nerede ve her ne zmn olurs olsun insnlrın e-postlrın, internete, dosylrın, fkslrın ve diğer verilere erişebilmeleri için kullnıln yöntemlerden birisidir. Ayrıc GSM mobil istsyonlrı için bir pket rdyo erişimi ve GSM ltypısınd bir pket bğlşmlı yönlendirme fonksiyonelliği sğlyn bir veri servisidir. GPRS fikri ilk olrk 1992 lerde orty çıkmıştır yılı ile birlikte de uygulmlrın bşlnmıştır. GPRS, GSM sistemlerinde pket verisi üzerine ETSI (Europen Telecommunictions Stndrts Institute) trfındn hzırlnmış bir stndrttır. Ayrıc TIA (Telecommunictions Industry Assocition) trfındn TDMA/136 sistemleri için pket veri stndrdı olrk kbul edilmiştir [17] GPRS Sisteminin Temel Özellikleri GPRS sistemi GSM sistemine ek bir servis olup internet vey firm LAN (Locl Are Network-Yerel Aln Şebekesi) lrın veri pketi kullnrk erişmek isteyen son kullnıcıy mobil istsyonu bğlntı cihzı olrk sğlr. Mobil istsyonu; GSM telefonu oln bir mobil terminli (MT-Mobile Terminl) ve bun bğlı bir bilgisyr oln terminl cihzını (TE-Terminl Equipment) içerir. GPRS veri trnsferi internet protokolüne dynır. Bu yüzden pket veri iletimi hv ryüzünü içeren uçtn uc kidesine dynrk yürütülür. GSM sistemi telefon için devre bğlşmlı hv ryüzünü kullnırken GPRS sistemi pket bğlşmlı hv ryüzünü kullnır ve her ikisi de GSM stndrtlrın göredir. Bir GPRS şebekesi, bir GSM şebekesinin bir uzntısı olrk görülebilir ve kendine özgü bzı eklemelere ihtiyç duyr. GPRS sistemini GSM sistemine tnıtmkl, bone ve terminl verisini koordine etmek, bğlmk, idre etmek ve güvenliklerini sğlmk hem devre bğlşmlı hem de
43 27 pket bğlşmlı hberleşme için mümkün olcktır. Pket veri fonksiyonu, GSM sistemince sğlnn devre bğlşmlı servislerle krışmz. GPRS sistemi, bir rdyo knlının pek çok MS trfındn meşgul edilmesi olyı ile krkterize edilebilir. Bir MS, bir veri pketi oluşturduğund, şebeke pketi uygun oln ilk rdyo knlındn gönderir. Büyük veri miktrlrını içeren bir mesj trnsfer edileceğinde pek çok pkete bölünür. Bu pketler dreslerine ulştığınd orijinl mesjı oluşturmk üzere tekrr birleşirler. Alınn bütün pketler veri hfızlrınd depo edilir. İletim esnsınd frklı pketler frklı rdyo knllrını kullnbilir. GPRS sistemindeki MS, sdece pket bğlşmlı hberleşme için kullnılbileceği gibi hem devre hem de pket bğlşmlı hberleşme için kullnılbilir. GPRS verinin mobil telefon şebekesi rcılığıyl gönderilmesi ve lınmsını sğlyn yeni ses dışı hizmetlerin eklendiği bir servistir. Günümüz devre bğlşmlı veri ve kıs mesj servisinin eksikliklerini giderir. GPRS ile ynı nd sekiz zmn dilimini kullnrk teorik mksimum hız 171,2 kbit/s ye ulşılbilir. Bu GPRS in bugünün sbit hberleşme şebekeleri üzerinden ypıln veri iletiminden 3 kt ve GSM şebekelerindeki devre bğlşmlı veri servislerinden 10 kt dh hızlı demektir. GPRS, ihtiyç olduğu nd verinin gönderilebildiği vey lınbildiği cil bğlntılrı kolylştırır. Bir çevirmeli modem bğlntısın gerek yoktur. Bu yüzden GPRS kullnıcılrı zmn zmn dim bğlntılı olrk nitelendirilir. Anınd erişim GPRS in devre bğlşmsın göre vntjlrındn biridir. GPRS kullnbilmek için kullnıcılrın ship olmsı gerektikleri şunlrdır: GPRS uyumlu bir mobil telefon, GPRS desteği sğlyn bir mobil telefon şebekesine bonelik, Yzılım ve donnım konfigürsyonlrı içeren mobil telefonlrın çok özel modellerini kullnrk GPRS verisinin lınmsı ve gönderilmesi hkkınd bilgi shibi olmk, GPRS üzerinden verinin gönderildiği vey lındığı bir hedef gereklidir. SMS te bu hedef genellikle bir mobil telefon olurken GPRS te bu bir internet dresidir.
![28 Aşğıd GPRS sisteminin mimrisi gösterilmiştir [18]. Şekil 4.1. GPRS mimrisi 4.2. GPRS Kullnım Alnlrı ve GPRS ile Sistem Denetimi GPRS için mümkün oln uygulmlr bir diz üstü bilgisyrdki hberleşme imkânlrındn düşük iletim hızlı özel uygulmlr kdr yyılbilir.](/docs-images/68/58041927/images/44-0.jpg "Bzı PC uygulmlrı GSM veri servisleri ile kullnılmkt iken GPRS ile çok dh ekonomik hle gelmiş durumddır. Mobil PC Ofisi insnın nerede olurs olsun snki ofisinde imiş gibi çlışmsın olnk sğlr.")
44 28 Aşğıd GPRS sisteminin mimrisi gösterilmiştir [18]. Şekil 4.1. GPRS mimrisi 4.2. GPRS Kullnım Alnlrı ve GPRS ile Sistem Denetimi GPRS için mümkün oln uygulmlr bir diz üstü bilgisyrdki hberleşme imkânlrındn düşük iletim hızlı özel uygulmlr kdr yyılbilir. Bzı PC uygulmlrı GSM veri servisleri ile kullnılmkt iken GPRS ile çok dh ekonomik hle gelmiş durumddır. Mobil PC Ofisi insnın nerede olurs olsun snki ofisinde imiş gibi çlışmsın olnk sğlr. GPRS in en önemli uygulmlrı rsınd e-post lım ve iletimi, dosy trnsferi ve internetle www dolşımı vrdır. E-post mesjlşmsınd GPRS in vntjı ücretlendirmenin iletilen veri miktrın bğlı olrk ypılmsındn dolyı bğlntının tüm zmn boyunc çık tutulbilmesidir. Dosy trnsferinde, küçük dosylr çğırm kurm süresi olmdığındn dolyı hızlıc iletilebilir. Web trmsınd yine ücretlendirmenin ktif olrk iletilen ve lınn veriye göre ypılmsının sğldığı vntj söz konusudur. Bütün bu uygulmlr LAN lr için tsrlnmıştır nck mobil uygulmlrı d hızl rtmktdır. GPRS küçük veri miktrlrının sık olmyn iletimini gerçekleştiren uygulmlr için büyük bir mrket oluşturmuş durumddır. Web tbnlı kontrol uygulmlrının
![29 önemli bir bölümü robot kontrolleri üzerinedir [19-21]. Bu tip hberleşme imkânlrındn yrrlnck pek çok elektriksel cihz vrdır.](/docs-images/68/58041927/images/45-0.jpg "GPRS vericisi cihz periyodik isttistiksel ht bildirimleri, hırsız lrmlrını hber vermek üzere yerleştirilebilir. Sistem erişim zmnı ve veri hızı yeterince hızlı bir işlem sğlmk için yüksek olmlıdır.")
45 29 önemli bir bölümü robot kontrolleri üzerinedir [19-21]. Bu tip hberleşme imkânlrındn yrrlnck pek çok elektriksel cihz vrdır. GPRS vericisi cihz periyodik isttistiksel ht bildirimleri, hırsız lrmlrını hber vermek üzere yerleştirilebilir. Sistem erişim zmnı ve veri hızı yeterince hızlı bir işlem sğlmk için yüksek olmlıdır. Aşğıd GPRS ile gerçekleştirilebilecek uygulmlrın bir sunumu verilmiştir. Şekil 4.2. GPRS ile sistem denetim uygulmlrı [14] Fotoğrf, resim, sttik web syflrı, prezentsyonlr gibi hreketsiz görüntüler sbit telefon şebekelerinde olduğu gibi mobil telefon şebekeleri üzerinden de lınıp gönderilebilir. Bu işlem; GPRS rdyo cihzın bğlnmış bir syısl kmerdn bir internet sitesine görüntüleri göndermek suretiyle gerçekleştirilecektir. Pket nhtrlmlı rdyo hizmetleri teknolojisi, kullnıcıy yüksek erişim hızının ynı sır, bğlntı süresine göre değil gerçekleştirilen veri lışverişi miktrı üzerinden trifelendirilen ucuz iletişim olnğı sğlmkt ve böylece sürekli bğlntı durumund gerçek zmnlı kontrol olnğı sunmktdır.



46 GPRS ve Mobil Tbnlı Sistem Denetimi Mobil tbnlı denetim sisteminde istemci olrk bilgisyr kullnılbildiği gibi cep telefonlrı d kullnılbilmektedir. Cep telefonundki uygulm progrmı; pket nhtrlmlı rdyo hizmetleri protokolü kullnrk internet üzerinde bulunn Web syfsın bğlnır. Mobil tbnlı denetim sistemi ile yerel bir bilgisyrdn vey internete bğlı bir bilgisyrdn bğımsız olrk, uzk noktlrdn vey yerel noktlrdn shdki sürecin kolyc görüntülenmesi ve denetlenmesi sğlnbilir [14, 16]. Aşğıd denetim sistemlerinde kullnılmkt oln PDA (Personl Digitl Assistnt - Kişisel Syısl Yrdımcı) telefon örnekleri gösterilmektedir. Şekil 4.3. Mobil tbnlı denetimlerde kullnıln PDA cep telefonlrı ve PDA cep telefonlrı için geliştirilmiş örnek bir uygulm

47 31 Yzılım tekniklerinin etkili bir şekilde kullnımı ile frklı pltformlrd gelişmiş kontrol yzılımlrı üretilebilir. PDA uygulmlrı geliştirmede tercih edilen en etkili pltformlr şunlrdır: Microsoft Visul Studio Pltformu: Bu pltform PDA yzılımlrı geliştirmede kullnıln en etkili pltformdur. Örneğin Visul Studio 2005 içerisinde yer ln Smrt Device (Akıllı Aygıt) uygulmlrı ltınd bulunn Pocket PC 2003, Smrtphone 2003 ve Windows CE 5.0 yzılım uygulmlrı rcılığı ile gelişmiş kontrol uygulmlrı üretmek mümkündür. Jv Pltformu: Jv 2 Pltformund bulunn Micro Edition (J2ME: Jv 2 Micro Edition) kullnıcılr mobil telefon gibi rçlrın içerisinde sunulur [22]. Jv 2 Micro Edition(J2ME); PDA lr, cep telefonlrı ve diğer elektronik ve gömülü cihzlr gibi sınırlı donnım kynklrın ship mkineler için Sun firmsınc üretilen Jv versiyonudur. Geliştirilen uygulmd Visul Studio 2005 pltformu tercih edilmiştir. Aşğıdki şekillerde görüldüğü gibi bu tip pltformlr yrdımı ile GPRS kullnılrk frklı cihz ve donnımlr için uygulmlr geliştirmek mümkündür. Şekil 4.4. Visul Studio 2005 ile geliştirilmiş bir PDA uygulmsı

48 Şekil 4.5. Visul Studio 2005 Smrt Device PDA uygulmsı yzılım geliştirme ryüzü 32




49 33 5. SİSTEM TASARIMI DC motorunun internet tbnlı SCADA sistemi rcılığı ile gerçek zmnlı kontrolünü mçlyn sistem ve tsrımı iki n grup ltınd işlenecektir: Donnım tsrımı Yzılım tsrımı 5.1. Donnım Tsrımı Sistemin donnımsl olrk işlevinin çık ve nlşılır bir şekilde görülebilmesi için kış diygrmı ve donnım blok diygrmı birlikte çizilmiştir. Şekil 5.1. Donnım blok ve sistem kış diygrmı

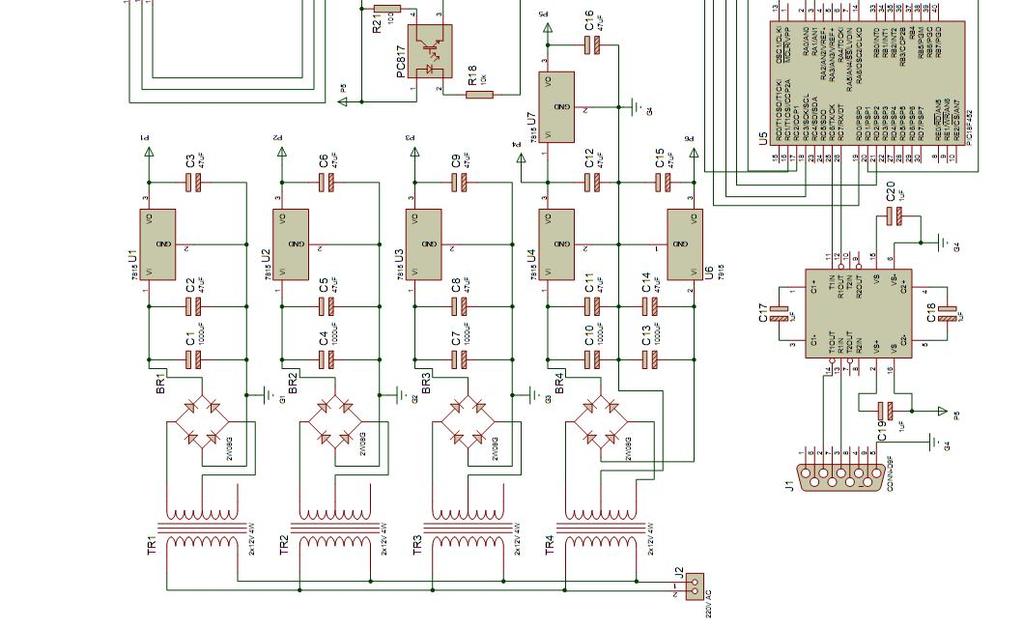
50 34 Resim 5.1. Sistemde kullnıln donnımlrın genel görünümü Şekil 5.1 de verilen genel blok diygrmın göre DC motorunun internet tbnlı kontrolünde kullnıln temel donnımlrı şu şekilde sırlmk mümkündür. Sürücü devreye it blok EK 1 de verilmiştir. Besleme devresi (220 /12 V,4W trnformtor, 7815,7915 ve 7805 gerilim regültörü) Ölçüm devresi Progrmlm ve kontrol devresi (PIC18F452 ile gerçekleştirilmiştir) Yönetim ve izleme (monitoring) sistemi MOSFET sürücü devresi (IR2110 mosfet sürücü entegreleri ile gerçekleştirilmiştir) H-köprü kontrol devresi (IRFP460 tipi 500V, 20A lik MOSFET ile gerçekleştirilmiştir) RS232 iletişim protokolü

51 Besleme devresi Motor ve sürücü devrelerin beslemeleri frklı knllrdn ypılmktdır. Kullnıln motorlrın beslemesi için 220 V-10A lik Delorenzo firmsın it bir güç kynğı kullnılmıştır. Bu güç kynğının tsrımı ypılmdığı için ypısı hkkınd detylı bilgi verilmeyecektir. Motor sürücü devre tsrımınd kullnıln ekipmnlrın beslemesi genelde 5V-15V rlığınddır. Tüm bu ekipmnlrın beslemesi şğıdki şekilde ve Resim 5.1 de 1 nolu blokt görüldüğü gibi tsrlnn 4 ktlı bir besleme devresi syesinde gerçekleştirilmiştir. Şekil V-15V besleme devresi

52 Ölçüm devreleri Ölçüm devreleri olrk nitelendirilen devreler; LEM kım sensörü ile motor miline bğlı ve motor hızın bğlı olrk 1000 d/dk krşılık 2.5 V gerilim üreten Tkogenertör sinyllerini lgılyn ve Resim 5.1 de 2 3 ve 4 nolu bloklrdn oluşn devrelerdir. LEM kım sensörü hkkınd detylı bilgi EK 2 de bulunmktdır. 4 nolu blokt gösterilen devre kım sensörü ve tko uçlrınd üretilen gerilimin rlığını ve seviyesini yrlmk mcıyl oluşturulmuş bir mplifiktör devresidir. Tsrlnn devrenin şemsı şğıd verilmiştir. Şekil 5.3. Ölçüm devreleri Progrmlm ve kontrol devresi PIC18F452 mikroişlemci yrdımı ile tsrlnmış ve Resim 5.1 de 5 nolu blok ile gösterilen devredir. Mikroişlemci ktı kontrol sisteminin en önemli öğesidir. PIC18F452 mikroişlemcisi hkkınd genişletilmiş bilgi EK 3 de verilmiştir. Sistemin çlışmsı esnsınd elde edilen kım, güç, hız gibi değişkenlerin RS232 portu rcılığı ile bilgisyrlr trfındn izlenebilmesi, MOSFET sürücülerin bilgisyrdn gönderilen komutlr rcılığı ile IRFP460 tipi mosfetleri sürme şekilleri gibi birçok fonksiyon progrmlnn mikroişlemci rcılığı ile gerçekleştirilmektedir. Aşğıd tsrlnn devrenin çizimi verilmiştir.

53 37 Şekil 5.4. PIC18F452 ile tsrlnn progrmlm ve kontrol devresi Motor kontrol sisteminde kullnıln mikroişlemci kodlrın d EK 4 den ulşılbilmektedir MOSFET sürücü devresi Optik trnsistorlr ve IR2110 tipi MOSFET sürücüleri rcılığı ile gerçekleştirilmiş, PIC18F452 mikroişlemcisinden gelen DGM sürme sinyllerini işleyerek bğlı bulunduklrı IRFP460 tipi MOSFET leri iletime geçiren ve Resim 5.1 de 6 nolu blok ile ifde edilen devredir. IR2110 sürücü entegrelerin uygulmd tercih edilmesinin temel sebepleri; z yer kplmlrı, hem lçk trf (low-side) hem de yüksek trf (high-side) MOSFET leri sürebilmeleri ile 500 V kdr oln uygulmlrd rhtç kullnılbilmeleridir. IR2110 tipi MOSFET sürücüleri hkkınd genişletilmiş bilgi EK 5 te bulunmktdır. IR2110 ile gerçekleştirilen sürücü devresi şğıd gösterilmektedir.

54 38 Şekil 5.5. MOSFET sürücü devre bloğu (MOSFET leri iletime geçiren IR2110 sürücüleri ve DGM sinyllerinin durumu gösterilmiştir) H-Köprü MOSFET konvertör devresi IRFP460 tipi 500V, 20A lik MOSFET ile gerçekleştirilmiş ve Resim 5.1 de 7 nolu blok ile gösterilen devredir. Doğru kım motorlrının dönüş yönünü değiştirmek için motor besleme voltjını ters çevirmek gerekmektedir. Devrede bulunn bir mikro denetleyicinin motorun dönüş yönünü kontrol etmesini isteniyors H-Köprü (H- Bridge) motor sürücü devresini kullnmk gerekmektedir. IRFP250 tipi MOSFET ler hkkınd genişletilmiş bilgi EK 6 de bulunmktdır. Aşğıdki şekilde motor kontrol sistemlerinde kullnıln klsik bir H-köprü konvertör devresi görülmektedir.
55 39 Şekil 5.6. Klsik H-köprü konvertör devresi Q1 ve Q4 MOSFET leri iletime geçtiğinde motor kımı soldn sğ doğru, Q2 ve Q3 MOSFET leri iletime geçtiğinde ise motor kımı sğdn sol doğru kcktır ve motor bir önceki dönüş yönünün tersine dönecektir. Q1 ile Q4 MOSFET lerinin bir koldn (DGM1) ve Q2 ile Q3 MOSFET lerinin de diğer bir koldn (DGM2) beslendiği düşünülürse devrenin doğruluk tblosunu y d motor çlışm durumlrını şğıdki gibi oluşturmk mümkün olcktır: Çizelge 5.1. Motor çlışm doğruluk tblosu DGM1 DGM2 Motor 1 0 İleri 0 1 Geri 0 0 Durğn 1 1 Fren Aşğıdki şekilde geliştirilen uygulmd; motorun sğ ve sol dönüşünü kontrol eden H-köprü konvertör devresinin çizimi verilmiştir.

56 40 Şekil 5.7. H-köprü konvertör devresi RS232 iletişim protokolü Bu uygulmd diğer bir önemli donnım sunucu bilgisyr ile hberleşmeyi sğlyn ve verilerin çevrimiçi ve gerçek zmnlı olrk izlenmesine olnk sğlyn RS 232 seri iletişim protokolüdür. Kısc bu protokolün ypısındn ve işleyiş şeklinden bhsetmekte yrr vrdır. RS 232 stndrdı en çok bhsedilen ve veri hberleşme cihzlrının uyumluluğunu sğlmk mcıyl Electronic Industries Assocition (EIA) trfındn orty çıkrılmış stndrttır. İlk olrk 1962 yılınd orty çıkmıştır ve onun üçüncü versiyonu 1969 yılınd RS-232C olrk dlndırılmıştır. RS 232 C ile kullnıln en yygın konektör tipi DB25'dir. Fkt modern bilgisyrlrd 25 uc gerek klmdığı için IBM DB 9 (9 uçlu) seri port konektörünü geliştirmiştir [23]. Seri link dını verdiğimiz iletişim protokolü; verici vey sürücü (kullnıln sistemde bilgisyr) belirli bir nd 1 bit olmk üzere bilgileri sıryl yollr. Özellikle üçten fzl bğlntının bulunduğu ve ğ dını ln sistemlerde çoğunlukl verici ve lıcılr ynı httn iletişim sğlrlr [24]. Üzerinde çlışıln sistemde seri veri kışı çift yönlü olrk gerçekleştirilmektedir. Bilgisyrlr rcılığı ile sıry konuln veriler RS-232 portu syesinde PIC18F452 mikroişlemcisine ve motor
57 41 uçlrındn elde edilen kım gerilim ve hız bilgileri de ynı şekilde RS-232 portu rcılığı ile izleme (monitoring) mçlı bilgisyr gönderilmektedir. Resim 5.1 de 8 nolu blok ile gösterilen RS-232 iletişim protokolü ve veri lmvermede kullnıln devre elemnlrı şğıdki şekilde gösterilmektedir. Şekil 5.8. Seri kblo rcılığı ile bilgisyr-mikroişlemci rsındki veri lış-verişi 5.2. Yzılım Tsrımı Sistemin çlışmsı esnsınd elde edilen verilerin izlenebilmesi (monitoring) ve gerek duyulduğund mikroişlemciye veri gönderme işlemlerinin ypılbilmesi mcıyl Visul Studio 2005 [25] pket progrmı rcılığı 3 frklı ryüz yzılımı gerçekleştirilmiştir. Gerçekleştirilen yzılımlrı şğıdki şekilde gruplndırmk mümkündür. Sunucu (server) yzılımı İstemci (client) yzılımı Cep telefonu (PDA) istemci yzılımı
 uygulmlrı ltınd bulunn Pocket PC 2003, Smrtphone 2003 ve Windows CE 5.")
58 42 Visul Studio 2005 pltformu çeşitli ryüzler geliştirmenin ynı sır özellikle PDA yzılımlrı geliştirmede kullnıln en etkili pltformdur. Örneğin Visul Studio 2005 içersinde yer ln Smrt Device (Akıllı Aygıt) uygulmlrı ltınd bulunn Pocket PC 2003, Smrtphone 2003 ve Windows CE 5.0 yzılım uygulmlrı rcılığı ile gelişmiş kontrol uygulmlrı üretmek mümkündür. Geliştirilen PDA yzılımınd Windows CE 5.0 yzılım uygulmsı kullnılmıştır Sunucu (Server) yzılımı Sistemin n kontrol r yüzüdür. Visul Studio içersinde yer ln Visul C++ uygulmsı rcılığı ile geliştirilmiştir. Şekil 5.9. Sunucu yzılımı Sunucu yzılımı 5 n pencereden oluşmktdır. 1. Bğlntı ve yr çubuğu: Bu ln sistem bğlntı ve port yrlrının ypıldığı kısımdır. Sunucu bilgisyrın seri port rcılığı ile sürücü sistemine hngi COM port noktsındn bğlndığı (COM1.., COM5) belirtilmelidir. Bğlntının doğru ypılıp ypılmdığı motor prmetreleri lnınd bulunn değerlerin değişiminden kolylıkl nlşılbilir. Bu lnd özellikle Sunucu IP ve
59 43 Bğlntıy izin ver komutlrının önemi büyüktür. Dışrıdn sisteme bğlntı ypmk isteyen kullnıcılrın sunucunun IP numrsını bilmeleri ve sunucu trfındn bğlntı izninin verilmesi gerekmektedir. 2. Motor Prmetreleri: Motorun kım, gerilim, güç, hız, moment, devir yönü, motor durumu gibi prmetrelerinin görüntülendiği kısımdır. Bu veriler bu lndn izlenebildiği gibi n izleme pencerelerinden de görüntülenebilir. 3. Aktif Ayr Değerleri: Bir lt pencere (yeni yr değerleri) rcılığı ile yrlnn motor çlışm değerlerinin görüntülendiği kısımdır. Motor dönme komutunun hngi yönde verildiği ve hız değerinin yrlndığı değer ile sürücü devrenin ktif olup olmdığını gösteren işret bu kısımdn kontrol edilebilir. 4. Yeni Ayr Değeri: Denetimin ypıldığı kısımdır. Motorun dönme yönü yrı, hız değerinin yrlnmsı ve motorun PID yrlmlrı bu lnd ypılmktdır. 5. İzleme (Monitoring) pencereleri: Motor it kım, hız, moment ve güç değerlerinin zmn bğlı olrk çevrimiçi izlenebildiği lndır. Bhsi geçen pencerelerin işlevleri Bölüm 6 d detylı olrk çıklncktır İstemci (Client) yzılımı Sisteme dışrıdn bğlntı ypmk isteyen istemcilerin kullndığı ve sunucu yzılımınd olduğu gibi Visul Studio 2005 pltformu kullnılrk geliştirilmiş r yüzdür. Bu r yüz de 5 n pencereden oluşmktdır fkt pencerelerin içeriği ve işlevleri kontrol kısıtlmlrındn dolyı sunucu r yüzüne göre dh zdır. Aşğıdki şekilde geliştirilen r yüz görülmektedir. Pencere benzerliklerinden dolyı istemci r yüz uygulmsı çıklmsınd sdece iki pencerenin çıklmsı üzerinde durulcktır.
60 44 Şekil İstemci (client) yzılım r yüzü 1. Bğlntı Çubuğu: Bu ln yrdımı ile bğlntısı ypılck oln sunucu bilgisyrın IP numrsı ile sunucu portunun girilmesi gerçekleştirilmektedir. Dikkt edilirse sunucu yzılımı r yüzünde kullnılmkt oln Bğlntıy İzin Ver ve Port Aç komutlrı; kontrol kısıtlmlrındn ve temel yrlrın sunucu bilgisyr üzerinden ypılm gerekliliğinden dolyı bu r yüzde bulunmmktdır. 2. Yeni Ayr Değerleri: Aynı şekilde sunucu bilgisyr rcılığı ile yrlnbilen PID prmetreleri giriş penceresi bu r yüz penceresinde bulunmmktdır. Bu pencere rcılığı ile sdece hız değerinin girilebildiği ve motorun dönüş yönünün yrlndığı çıkç görülmektedir Cep telefonu (PDA) istemci yzılımı Bilindiği gibi GPRS teknolojisini kullnbilmek için mobil şebeke ve servis sğlyıcı ltypısın GPRS donnım ve yzılımlrın entegre edilmesi ve GPRS uyumlu mobil telefonlr gerekmektedir.

61 45 Cep telefonundki uygulm progrmı; pket nhtrlmlı rdyo hizmetleri protokolü kullnrk internet üzerinde bulunn Web syfsın y d IP numrsı bilinen sunucu bir bilgisyr bğlnır. Uygulmmızd Visul Studio 2005 Pltformu rcılığı ile Windows CE 5.0 yzılım uygulmlrı için geliştirilmiş bir r yüz kontrol uygulmsı bulunmktdır. Şekil Windows CE 5.0 yzılım uygulmlrı için geliştirilmiş PDA uygulmsı Yukrd resmi verilen uygulm yzılımı bilgisyr üzerinden ypıln istemci kontrol r yüzüne benzer şekildedir. Ar yüz yzılımı 4 n pencereden oluşmktdır: 1. Bğlntı Penceresi: IP numrsı bilinen sunucu bilgisyr GPRS rcılığı ile bğlntının ypılbilmesini sğlyn penceredir. IP numrsı ve port numrsının yzılmsı ve Bğln komut butonun bsılmsı ile motor prmetrelerinin ekrnd görüntülenmesi sğlncktır.
62 46 2. Prmetre Penceresi: Sunucu ve istemci yzılım r yüzlerinde olduğu gibi motorun kım, gerilim, güç, hız, moment, devir yönü, motor durumu gibi prmetrelerinin görüntülendiği kısımdır. 3. Aktif Ayr Değerleri: Sunucu ve istemci yzılım r yüzlerinde olduğu gibi Sunucu ve istemci bilgisyrlr rcılığı ile yrlnn motor çlışm değerlerinin görüntülendiği kısımdır. Motor dönme komutunun hngi yönde verildiği ve hız değerinin yrlndığı değer ile sürücü devrenin ktif olup olmdığını gösteren işret bu kısımdn kontrol edilebilir. 4. Yeni Ayr Değeri: Denetimin ypıldığı kısımdır. Motorun dönme yönü yrı, hız değerinin yrlnmsı bu pencereden ypılmktdır. Fkt yzılım bir istemci yzılımı olduğu için kontrol kısıtlmlrındn dolyı pencerede PID kontrol yrı ypılmmktdır Yzılımlr rsı hberleşme veri ypısı Sistem de bulunn üç det PC yzılımı kendi rlrınd ve motor sürücüsü ile veri lış verişi ypmktdırlr. Bu veri lışverişinde sunucu PC kendi ekrnındn girilen y d diğer istemcilerden girilen verileri lır ve sürücü işlemcisine RS-232 protokolü ile yzr. Dh sonr sunucu PC, sürücü devreden motor durumun it verileri lrk kendi ekrnınd gösterir ve ynı zmnd d diğer istemci PC lere yollr. Şekil 5.12 de sistemin genel veri hberleşme ypısı görülmektedir. Şekil Sistemin veri hberleşme ypısı


63 47 Sunucu PC ile sürücü devre rsındki hberleşme de ASCII krkterler kullnılmıştır. Sunucu PC yolldığı her veri pketinin önüne bir byte dres verisi eklemektedir. Böylece, sürücü gelen verilerin nsıl değerlendirileceğini bu dres bilgisinden elde etmektedir. Sunucu PC sürücü devresine şekil 5.13 deki bilgileri şğıdki sır ile kbps. hızl yollmktdır. Şekil Sunucu PC den motor sürücüsüne yollnn veri pketi. Benzer şekilde sürücü devre de sunucu PC ye motor durumun ilişkin verileri şekil 5.14 de verilen sır ile yollmktdır. Şekil Motor sürücüsünden sunucu PC ye yollnn veri pketi
64 48 Yukrıd bhsedilen hberleşme ypısı sunucu PC ile sürücü devre rsınd ypıln RS-232 hberleşmesine it ypıyı nltmkt idi. Benzer şekilde sunucu PC ile istemci PC ler rsınd d TCP/IP hberleşmesi ypılmktdır. Bu hberleşme yönteminde de sunucu PC nin IP ve port numrsı diğer istemci PC ler trfındn bilinmek zorunddır. İstemci PC ler sunucu PC nin IP ve port numrsını kullnrk internet y d intrnet üzerinden sunucu PC ye bğlnırlr. PC ler rsı hberleşme sisteminde verilerin izlemiş olduğu yollr şekil 5.15 de görülmektedir. İstemci PC-1 TCP/IP Sunucu PC TCP/IP GPRS İstemci Pocket PC-1 Şekil PC ler rsı veri hberleşme ypısı

65 49 6. DENEYSEL ÇALIŞMALAR Çlışmd ypıln deneyler birkç şmdn meydn gelmektedir. Ypıln deneyler, elde edilen sonuçlr ve sonuçlr rsındki frklılıklrdn bhsetmeden önce deney düzeneğini gözden geçirmekte fyd vrdır. Deneylerde; bir önceki bölümde bhsedilen sürücü devre ve yzılımı yönetmede kullnıln sunucu ve istemci bilgisyrlr hriç birkç hrici donnım d kullnılmıştır. Bu donnımlr; İki det 200 V, 5,75 A değerlerine ship 1 kw lık LM mrk şönt srgılı DC motoru (motorlrdn biri genertör mçlı kullnılmıştır), Bir det Tkogenertör (1000 d/dk krşılık 2,5 V vermektedir), Bir det 220 V, 10 A değerlerine ship DE LORENZO DL1013 T2 mrk hrici güç kynğı, Bir det CISCO mrk kblosuz modem, Seri bğlı lmblrdn oluşturulmuş 1 kw lık güce ship yük, Akım ve gerilim ölçümleri için kullnıln iki det ölçü leti. Aşğıd resimlerde deney düzeneği ve deney düzeneğinde kullnıln donnımlr görülmektedir. Resim 6.1. Deney düzeneğinin (SCADA sisteminin) genel görünümü


66 50 Resim 6.2. Deneyde kullnıln 1 kw lık LM mrk D.A motorlrı ve tkogenertör Resim 6.3. Deneylerde sunucu olrk kullnıln dizüstü bilgisyr, istemci dizüstü bilgisyr ile istemci PDA cep telefonu

67 51 Resim 6.4. Deneylerde yük olrk kullnıln 1 kw lık seri lmb düzeneği ve ölçü letleri Tsrlnn SCADA sistemin etkinliğini ve uygulnbilirliğini knıtlmk mcıyl ypıln deneyler üç dımdn meydn gelmektedir: İlk deneyde; DGM ornı sbit tutulup (%80) motor nm yüküne (I=5 A) kdr yüklenmiş, motorun sunucu ve istemci trfınd elde edilen kım, güç, hız ve moment grfikleri elde edilmiştir. İkinci deneyde; motor yükü sbit tutulup (100 W yükte) DGM ornı %25- %100 rlığınd değiştirilmiş ve motorun sunucu ve istemci trfınd elde edilen kım, güç, hız ve moment grfikleri elde edilmiştir. Son deneyde ise motorun PID kontrolü gerçekleştirilmiş ve istemci trfınd elde edilen kım, güç, hız ve moment değişimleri elde edilmiştir.

68 Sbit DGM Ornınd (%80) Gerçekleştirilen Deneyler Yzıln ryüzde; DGM ornının %100 yni 1 olmsı demek syısl olrk 1024 değerine denk gelmektedir. DGM ornın %80 olrk seçilmesi; sunucu ryüzünde Set Hız lnın 818 syısının yzılmsı nlmını tşımktdır. Gerekli yrlmlr ypıldıktn sonr motor uçlrın bğlnn 1 kw lık seri lmblrdn oluşn yük kdemeli olrk rtırılrk motorun çektiği kım bğlı olrk elde edilen moment ve hız değerleri kydedilmiştir. Şekil 6.1. DGM %80 iken motorun yüksüz olduğu durumd sunucu trfınd elde edilen çlışm grfikleri Yukrıdki şekilde sunucu trfınd elde edilen grfik değerleri verilmiştir. İstemci trfınd ynı değerlerin gözlenebilmesi için Bölüm 5 te bhsedildiği gibi öncelikle sunucu bilgisyr kullnıcısının Bğlntıy İzin Ver tuşun bsmsı ve istemci bilgisyr ship kullnıcının ryüzü çlıştırdıktn sonr sunucu bilgisyrd gözüken IP numrsını yr çubuğun girip bğln tuşun bsmsı gerekmektedir. İstemci bilgisyr sistemle hberleşmeye bşldığınd ekrndki grfikler kymy ve Motor Prmetreleri lnındki değerler değişmeye bşlycktır.

69 53 Şekil 6.2. DGM %80 iken motorun yüksüz olduğu durumd istemci trfınd elde edilen çlışm grfikleri Grfikler dikktlice incelendiğinde sunucu trfınd görüntülenen değerler ile istemci istemci trfınd görüntülenen değerlerde frklılık görülmektedir. Bu değerlerin frkı; çok z d ols hberleşme kybı ve ekrn görüntüleri lınırken orty çıkn senkronizsyon frkıdır. Çizelge 6.1 de deney dımlrın bğlı olrk sbit DGM de motorun yüklenme tblosu görülmektedir. Çizelge 6.1. Sbit DGM de motorun çlışm değerleri Adım DGM ornı Akım (A) Gerilim (V) Hız (d/dk) Moment (Nm) 1 %80 (818) 0,4 175, ,53 2 %80 (818) 1,43 175, ,27 3 %80 (818) 3 175, ,58 4 %80 (818) 4,14 175, ,73 5 %80 (818) 5,3 175, ,59 Sbit DGM de; motorun yüklendikçe doğl olrk devreden çektiği kımın ve momentin rtmkt olduğu bun krşın hızının düştüğü gözlemlenmektedir. Aşğıd frklı yük durumlrınd sunucu trfınd elde edilen grfikler görülmektedir. İstemci trfınd elde edilen grfikleri EK-6 d bulmk mümkün olcktır.
70 54 Şekil 6.3. DGM %80 iken motorun %25 yüklü olduğu durumd sunucu trfınd elde edilen çlışm grfikleri Şekil 6.4. DGM %80 iken motorun %50 yüklü olduğu durumd sunucu trfınd elde edilen çlışm grfikleri
71 55 Şekil 6.5. DGM %80 iken motorun %75 yüklü olduğu durumd sunucu trfınd elde edilen çlışm grfikleri Şekil 6.6 DGM %80 iken motorun nm yükünde sunucu trfınd elde edilen çlışm grfikleri
72 Sbit Yükte (100W) Değişken DGM Görev Sykılınd Gerçekleştirilen Deneyler Bu deneyde; motor uçlrın bğlnn 1 kw lık seri lmblrdn oluşn yükün değeri 100 W t sbit tutulmuş, DGM görev sykılı %25 ile %100 rlığınd değiştirilerek motorun çektiği kım, moment ve hız değerleri elde edilmiştir. Bu deney; gerçekleştirilen uygulmnın yni ryüz ve sürücü devre hberleşmesinin etkinliğinin ölçülebileceği en önemli deneydir. Çünkü ryüz yrdımı ile değiştirilen DGM freknsı ve bun bğlı olrk sürücü devrenin tepkisi ve motordn elde edilen kım, hız ve moment gibi değişkenlerin hepsinin bir rd görüntülenmesi bu deney syesinde izlenebilmektedir. Bu deneyde sunucu trfınd elde edilen çlışm grfikleri şğıd gösterilmektedir. PDA cep bilgisyrınd elde edilen ekrn görüntüleri EK-7 de bulunbilir. Şekil 6.7. Sbit yükte (100W), %25 DGM de elde edilen grfikler
73 57 Şekil 6.8. Sbit yükte (100W), %50 DGM de elde edilen grfikler Şekil 6.9. Sbit yükte (100W), %75 DGM de elde edilen grfikler
74 58 Şekil Sbit yükte (100W), %100 DGM de elde edilen grfikler Aşğıdki çizelgede deney dımlrın bğlı olrk sbit yükte (100W) frklı DGM görev sykılı durumlrınd motorun çlışm değerleri görülmektedir. Çizelge 6.2. Sbit yükte frklı DGM ornlrı için motorun çlışm değerleri Adım DGM ornı Akım (A) Gerilim (V) Hız (d/dk) Moment (Nm) 1 %25 (256) 1, ,12 2 %50 (512) 1, ,75 3 %75 (767) 1, ,20 4 %100 (1024) 1, ,26 Çizelge incelendiğinde ynı yük durumlrınd DGM değerinin değiştikçe motor geriliminin ve hızının oldukç değiştiği, kım ve moment değerinin yük değişmediği için hemen de sbit kldığı gözlemlenmiştir. Bu deney; ryüz ve dolyısı ile sürücü trfındn değiştirilen DGM görev sykılının motor giriş gerilimini değiştirerek motor hızını etkili bir şekilde nsıl değiştirildiğini göstermektedir.
75 PID (Ornsl-İntegrl-Türev) Kontrol ile Ypıln Deneyler PID kontrol ile ypıln deneyler ve sonuçlrındn bhsetmeden önce PID kontrol ve bu uygulmd tercih edilen PID değerlerinin nsıl hesplndığı ile ilgili bilgi vermekte yrr vrdır PID (ornsl-integrl-türev) kontrol DC motor hız kontrolü uyrtım gerilimi y d endüvi gerilimi değiştirilerek ypılır. Gerilim değiştirme işlemi yrlı bir güç kynğı y d uygulmmızd bhsettiğimiz ve gösterdiğimiz gibi PWM tekniğiyle ypılbilir. Yukrıdki iki yöntemde de motorun hızı istenen seviyeye getirilebilir fkt motor yüklendikçe y d üzerindeki yük klkınc motorun hızı yrlnn değerden uzklşcktır. Bun ek olrk bir DC mkinenin hızı devir rlığınd değiştirmek istenildiğinde işlemin ne kdr zmnd olcğı bilinememektedir. İşte bu ve benzeri durumlrı istenilen seviyede tutmk için geliştirilmiş yöntemlerden birisi PID denetimidir. PID kontrol; günümüzde çok kullnıln bir kontrol yöntemidir [26]. PID denetimi kplı-döngü denetim sisteminin girişine bir bsmk fonksiyonu uygulnmsı hlinde sistem cevbının yeni klıcı durum değerine en kıs zmnd ve krrlı bir şekilde erişmesini sğlyn denetim orgnıdır [27]. PID tipi denetim sisteminin blok diygrmı şğıdki gibi ifde edilmektedir. Şekil PID kontrol blok diygrmı
76 60 PID sisteminin trnsfer fonksiyonunu d şğıdki gibi ifde etmek mümkündür. (6.1) (6.2) (6.3) Burd P (Ornsl) tipi denetim; denetlenen sistemin çıkışınd herhngi bir nedenden dolyı oluşn htyı gidermek için girişe uygulnn sinyle ornsl olrk etki eder ve çıkışın istenen seviyeye gelmesini sğlr. Ornsl etkide klıcı durum htlrı gözlenir, çıkış slınımlıdır. I (İntegrl) denetim; ornsl etkide orty çıkn klıcı durum htlrını bstırır. Sistem girişine birim bsmk tepkisi uygulndığınd ilk olrk ornsl etki devreye girer. Htyı tm olrk yok etmek içinde integrl etki devreye girerek çıkışı istenen seviyeye getirir. Yni klıcı durumu düzeltir. D (Türev) etki; sistemde oluşn htnın değişimine tepki gösterir. Htnın klıcı durumund bir etkisi yoktur. Türev etkinin işlevi sistemde ht oluşmy bşlmsı nınd devreye girerek çok hızlı bir şekilde htyı bstırmy çlışmktır. Bu nedenle türev etkinin en büyük üstünlüğü sistemde oluşck oln htyı önceden sezip htnın büyümeden bstırılmsını sğlmktır PID prmetrelerinin hesplnmsı Sistem denetiminin istenilen şekilde ypılbilmesi için yukrd bhsi geçen P-I-D prmetrelerinin hesplnmsı gerekmektedir. Çlışmmızd tercih ettiğimiz P-I-D prmetrelerinin hesplnmsı için MATLAB progrmı kullnılmıştır. Prmetreler doğru seçildiğinde sistemin tepkisinin Şekil 6.12 deki gibi olmsı beklenir.
 L (H) B(Nms) J (kgm 2 ) K(Vs/rd) 2,8 0,029 0,1 0,01 0,86 J=0.01; b=0.1; K=0.86; R=2.8; L=0.029; num=k; den=[(j*l) ((J*R)+(L*b)) ((b*r)+k^2)]; Kp=10; Ki=150; Kd=0.")
77 61 Şekil İstenilen zmn tepkisi Böyle bir tepkiyi elde etmek için öncelikle motor prmetrelerine ihtiyç vrdır: Çizelge 6.3. Motor prmetreleri ve kynk kodu R (Ω) L (H) B(Nms) J (kgm 2 ) K(Vs/rd) 2,8 0,029 0,1 0,01 0,86 J=0.01; b=0.1; K=0.86; R=2.8; L=0.029; num=k; den=[(j*l) ((J*R)+(L*b)) ((b*r)+k^2)]; Kp=10; Ki=150; Kd=0.1; numc=[kd, Kp, Ki]; denc=[1 0]; num=conv(num,numc); den=conv(den,denc); [numc,denc]=cloop(num,den); step(numc,denc) title('d.a. Motorunun PID Denetimi')

78 62 Elde edilen motor prmetreleri yukrd verilen kodlrl birlikte MATLAB d hzırlnn bir m-dosysı içersine yzılıp çlıştırıldığınd Şekil 6.12 de verilen eğri edilmiş ve denenerek bulunn prmetrelerin doğruluğu onylnmıştır PIC18F452 rcılığı ile PID kontrolünün gerçekleştirilmesi PIC18F452 mikroişlemcisi; PC ile seri hberleşerek PC den DC motorun devir yönünü ve hızını okur. Tkogenrtörden de DC motorun gerçek hızını okuyrk bu verilere göre yine mikroişlemci içersine gömülmüş oln PID lgoritmsını çlıştırır ve sonucu PWM knlındn DC motor gerilim lrk uygulr ve ynı zmnd d tkogenertörden okumuş olduğu gerçek hız bilgisini PC ye yollyrk PC de sonucun grfik olrk gösterilmesini sğlr. Aslınd burd ypıln tmmen motor hızını istenilen seviyede tutmk için yzılmış oln PID lgoritmsının motor giriş gerilimini yükseltmesidir. Gerçekleştirilen uygulmd istemci dizüstü bilgisyr trfınd elde edilen grfikler şğıd verilmiştir. Şekil Motorun istemci trfınd elde edilen PID li çlışm grfikleri
79 63 Şekilden de nlşılcğı gibi PID lgoritmsı uygulnn motorun belirli rlıklrl yüklendiğinde (kımın rtışındn kolylıkl nlşılbilir), hızın 1000 d/dk d sbit klmy çlıştığı görülmüştür. Bu durum d tsrlnn ryüz ve sürücü devre etkileşiminin gyet iyi ve seçilen P-I-D prmetrelerinin mkul prmetreler olduğunu göstermektedir.
80 64 7. SONUÇ VE ÖNERİLER Bu çlışmd, teknolojinin günümüz uygulmlrın getirdiği yenilikler dikkte lınrk etkileşimli küçük bir SCADA uygulmsı geliştirilmiş ve uzktn kontrolün günlük hytımız getirdiği kolylıklr deneylerle isptlnmy çlışılmıştır. Elde edilen grfiksel sonuçlr sistemin güvenirliliğini ve etkinliğini çıkç orty koymktdır. Snyi ve günlük yşmımızın bir prçsı hline gelmiş DC motorun kontrolü sunucu bir diz üstü bilgisyr, istemci bir diz üstü bilgisyr ve pket nhtrlmlı rdyo hizmetleri sistemi kullnn PDA cep bilgisyrı ve internet tbnlı C# dilinde yzılmış oln SCADA sistemi ile sğlnmıştır. Motorun hız ve moment kontrolü herhngi bir ek donnım gerek klmdn gerçek zmnlı olrk gerçekleştirmiştir. Pket nhtrlmlı rdyo hizmetleri mliyetinin giderek zlmsı ve bununl birlikte kblosuz sistemlerde orty çıkn hızlı ve güvenli kontrol seçenekleri bu sistemlerin tercih edilmesinde önemli bir rol oynmktdır. Oluşturuln sistemi benzer nitelikteki denetim sistemlerden yırn en büyük özellik; sistemin istenen bir yerden izlenmesi sorunun ekonomik, kblosuz ve yüksek güvenilirlikli bir çözüm getirmesidir. Ypıln çlışm ileriye dönük internet tbnlı gelişmiş kontrol uygulmlrınd ve SCADA sistemlerindeki her türlü çlışmlrd uygulmlı bir referns olrk kullnılbilecek olmsının ynınd sistemin tnıtımı ve krşılştırılmsı için kynk olbilecek şekilde düzenlenmiştir. Gelecekte bu konu ile ilgili ypılck çlışmlr için sistemin birden fzl donnımı kpsyck ve kontrol edebilecek şekilde tsrlnmsı düşünülebilir. Aktrıln bu fikir tüm bir fbrik otomsyonun kdr dyndırılbilir. Ayrıc sistem; mühendislik ve teknik eğitim ve öğretim kurumlrınd okutuln lbortur derslerinde hem DC motorlrının kontrolü hem de uzktn iletişim lgoritmlrın destek verebilecek ypıddır.
81 65 KAYNAKLAR 1. Çlış, H., Çkır, A., "Internet üzerinden ev otomsyonu", Otomsyon, 142: (2004). 2. Nyeen Hsn, S.M., Hybrid Electric Vehicle Powertrin: Online Prmeter Estimtition of n Induction Motor Drive nd Torque Control of PM BLDC Strter-Genertor, Doctorte Thesis, The Grdute Fculty of University of Akron, USA, (2008). 3. Bl, G., Doğru Akım Mkinlrı ve Sürücüleri, Seçkin Yyıncılık, Ankr, (2001). 4. Chpmn, S.J., Electric Mchinery Fundmentls, McGrw-Hill Interntionl Editions, New York, (1999). 5. Akmeşe, D., Güneş Pnelinden Beslenen bir DA Motorunun Çlıştırılmsı, Yüksek Lisns Tezi, Gzi Üniversitesi Fen Bilimleri Enstitüsü, Ankr, (2006). 6. Aydoğmuş, Ö., PIC Mikrodenetleyici ile DC Motorun Hız Kontrolü, Yüksek Lisns Tezi, Fırt Üniversitesi Fen Bilimleri Enstitüsü, Elzığ, 2-4 (2006). 7. Bin, Q., Hoy, Beng, G., Yilu L., Eng Kit, C., Internet-Bsed SCADA Disply System, IEEE Computer Applictions in Power, ISSN : (2002). 8. Ozdemir, E., Krcor, M., Mobile phone bsed SCADA for industril utomtion, ISA Trnsctions, 45(1): (2006). 9. Ong, Y.S., Gooi, H.B., Lee, S.F., Jv-bsed pplictions for ccessing power system dt vi Intrnet, extrnet nd Internet, Int. J. Electr. Power Energy Syst., 23: (2001). 10. Ngi, N., Kg, T., An open distributed computer system rchitecture for power network control, Proceedings of the Interntionl Conference Power Systems nd Engineering, (1994). 11. Wrcuse, J., Menz, B., Pyne, J.R., Servers in SCADA pplictions, IEEE Trns. Ind. Appl., 9 (2): (1997). 12. Wllnce, D., How to put SCADA on the Internet, Control Engineering, 50 (9), (2003).
82 Şhin, H., Elektronik Syçlrd Kullnılmk Üzere uzktn GPRS Modül ile Elektronik Elektrik Sycı Okum Uygulmsı, Yüksek Lisns Tezi, Gzi Üniversitesi Fen Bilimleri Enstitüsü, Ankr, 9-13 (2007). 14. Derici, S., GPRS ile Sistem Denetimi, Yüksek Lisns Tezi, Gzi Üniversitesi Fen Bilimleri Enstitüsü, Ankr, (2007). 15. Demir, M., Elektrik Syçlrının GPRS ile Uzktn Okunmsı, Yüksek Lisns Tezi, Afyon Koctepe Üniversitesi Fen Bilimleri Enstitüsü, Afyon, (2006). 16. İnternet: İTÜ, Bilgi İşlem Dire Bşknlığı, Kblosuz İletişim Teknikleri, GPRS, (2010). 17. Acrkn, B., Kılıç, O., Küçüksrı, S., Zorlu, S., Elektrik Tesislerinde SCADA Sistemleri İçin TCP/IP Tbnlı Uç Birim Sistemleri, TMMOB Elektrik Mühendisleri Odsı Denizli Şubesi, III. Otomsyon Sempozyumu Bildiriler Kitbı, Denizli, 119 (2005). 18. Chih-Hung, W., Shun-Chien, C., Yu-Wei, H., Design of wireless ARMbsed utomtic meter reding nd control system, Power Engineering Society Generl Meeting, 1: (2004). 19. Hzry, D., Sugisk, M., Yuji, T., Humn-Robot Interfce over the Web Bsed Intelligent System, Americn Journl of Applied Sciences, 3 (1):, (2006). 20. Erdemir, G., Kuzucuoğlu, A.E., Web Tbnlı Robotik Eğitimi, 1 st Interntionl Voctionl nd Technicl Eduction Technologies Congress, Mrmr Üniversitesi, İstnbul, (2005). 21. Melek, A., İnternet Üzerinden Robot Kontrolü, Yüksek Lisns Tezi, Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü, (2001). 22. Knudsen, J., Building MIDlets, Wireless Jv Developing with J2ME, Second Edition, Apress, New York, (2003). 23. Axelson, J., Seril Port Complete: Progrmming & Circuits for RS-232 & RS-485 Links & Networks, Lkeview Reserch,, Mdison, USA, 9-11(2001). 24. Uygun, D., Hibrit Adım Motorunun Syısl Kontrolü, Yüksek Lisns Tezi, Mrmr Üniversitesi Fen Bilimleri Enstitüsü, (2006). 25. Demirli, N., İnn, Y., Visul C++. Net 2005, Plme Yyınlrı, Türkiye, (2007).
83 Bek, S. M., Kuc, T. Y., An dptive PID lerning control of DC motor, IEEE Interntionl, 3: (1997). 27. Hung, J. M., University Automtic Control, University City Books Enterprise Inc, Kohsiung Tiwn, (2004).
84 EKLER 68

85 EK-1 Sürücü devre 69
86 EK-2 LEM kım sensörü 70
87 EK-2 (Devm) LEM kım sensörü 71
88 EK-3 PIC18F452 mikroişlemci ktloğu 72
")
89 EK-3 (Devm) PIC18F452 mikroişlemci ktloğu 73
90 74 EK-4 Motor sürücü PIC kynk kodu #include<pic18.h> #include<stdio.h> #include<dely.c> #include<stdlib.h> #include<seril.c> CONFIG(1, HS); CONFIG(2, PWRTDIS & WDTDIS & BORDIS ); CONFIG(4,LVPDIS); unsigned int Seri_Dt_Recive,Seri_Dt,Seri_Dt_Msk=48,Dt_No; unsigned int Kontrol,MotorYonu=1,MotorHizi,MotorHizi_Syc,MotorHizi_Set=1, Reset; unsigned int Send_Akim,Send_Gerilim,Send_Hiz,Send_Yon,Send_Kontrol,Send_End,Temp_Hiz,Hiz_Send_Temp; flot PWM_PID,Kp=1,Ki=1,Kd=1,Tko_Hiz,Integrl_Vlue; unsigned int Kp_Temp,Kd_Temp,Ki_Temp; signed int Int_PWM_PID,PWM; signed int e,e_onceki,i; signed int AdcTemp1,AdcTemp2,AdcTemp3,Hberlesm_Syc; int Akim_Totl,Akim_Out,Temp_Akim; int Hiz_Totl,Hiz_Ort,Akm_Tmp1,Akm_Tmp2,SenAkim; sttic int DelyCounter1,DelyCounter2, Onceki_Yon,PortD_Mem,PC_Yon,PC_Enble,Kontrol_Temp, Yon_Memory,kontrol_Temp,Yon_ChnceCll; chr Motor_Direction; void Communiction_Error(void) { unsigned chr s; if(oerr) { TXEN =0; TXEN =1; CREN =0; CREN =1; } if(ferr) { s =RCREG; TXEN =0; TXEN =1; } } void Forwrd_PWM_Clcultion() { if (Motor_Direction==3) { CCPR2L =0; CCP2CON =12;
91 75 EK-4 (Devm) Motor sürücü PIC kynk kodu e=motorhizi_set-tko_hiz; PWM_PID = PWM_PID +((Kp*e)+(Ki*e)+(Kd*(ee_onceki))); if(pwm_pid >2332) PWM_PID =2332; if(pwm_pid <=0) PWM_PID =0; PWM =(int) (PWM_PID*0.438); e_onceki =e; CCPR1L =(PWM>>2); CCP1CON =((PWM&3)<<4) 12; } else { CCPR1L =0; CCP1CON =12; } } void Reverse_PWM_Clcultion() { if (Motor_Direction==4) { CCPR1L =0; CCP1CON =12; e=motorhizi_set-tko_hiz; PWM_PID =PWM_PID +((Kp*e)+(Ki*e)+(Kd*(e-e_onceki))); if(pwm_pid >2332) PWM_PID =2332; if(pwm_pid <=0) PWM_PID =0; PWM =(int) (PWM_PID*0.438); e_onceki =e; CCPR2L =(PWM>>2); } else { CCP2CON } } void PC_Hberlesme() { CCPR2L =0; CCP2CON =12; =((PWM&3)<<4) 12; PC_Yon =(PORTD & 2)>>1; PC_Enble =(PORTD & 8)>>3; Send_Akim =SenAkim ; Send_Gerilim =PWM ; Send_Hiz =Hiz_Ort ; Send_Yon =PC_Yon ; Send_Kontrol =PC_Enble ; Send_End =9999; Hberlesm_Syc++; if (Hberlesm_Syc>=50 & Hberlesm_Syc<100 ) { printf("a%d",send_akim); Hberlesm_Syc=100;
92 76 EK-4 (Devm) Motor sürücü PIC kynk kodu } } else if (Hberlesm_Syc>=150 & Hberlesm_Syc<200 ) { printf("b%d",send_gerilim); Hberlesm_Syc=200; } else if (Hberlesm_Syc>=250 & Hberlesm_Syc<300 ) { printf("c%d",send_hiz); Hberlesm_Syc=300; } else if (Hberlesm_Syc>=350 & Hberlesm_Syc<400 ) { printf("f%d",send_yon); Hberlesm_Syc=400; } else if (Hberlesm_Syc>=450 & Hberlesm_Syc<500) { printf("g%d",send_kontrol); Hberlesm_Syc=500; } else if (Hberlesm_Syc>=550 & Hberlesm_Syc<600 ) { printf("g%d",send_kontrol); Hberlesm_Syc=0; } void Adc_Clcultion() { Akm_Tmp1 =0; Akm_Tmp2 =0; SenAkim =0; ADCON0=1; DelyUs(100); ADCON0=5; while((adcon0 & 4)!=0); Akm_Tmp1=ADRESH; Akm_Tmp1=Akm_Tmp1<<2; Akm_Tmp2=ADRESL; Akm_Tmp2=Akm_Tmp2>>6; SenAkim=Akm_Tmp2+Akm_Tmp1; ADCON0=9; DelyUs(100); ADCON0=13; while((adcon0 & 4)!=0); AdcTemp1=ADRESH<<2; AdcTemp2=AdcTemp1+(ADRESL>>6); Hiz_Send_Temp=AdcTemp2;
93 77 EK-4 (Devm) Motor sürücü PIC kynk kodu Tko_Hiz= Hiz_Send_Temp * 2.28; Hiz_Ort=Hiz_Totl/6; Hiz_Totl=Hiz_Totl-Hiz_Ort+Hiz_Send_Temp; } void Chnge_Direction() { if (Kontrol ==1 && Yon_ChnceCll==1) { if (Yon_Memory!= 1) { Yon_Memory =1; PWM_PID =0; CCPR1L =0; CCP1CON =12; CCPR2L =0; CCP2CON =12; Motor_Direction =0; DelyMs (250); PORTD =8; // Ileri Yon Psif Kontrol =5; } else { PORTD =8; // Ileri Yon Psif Motor_Direction =0; Yon_Memory =1; Kontrol =5; } } else if (Kontrol ==2 && Yon_ChnceCll==1) { if (Yon_Memory!= 2) { Yon_Memory =2; PWM_PID =0; CCPR1L =0; CCP1CON =12; CCPR2L =0; CCP2CON =12; Motor_Direction =0; DelyMs (250); PORTD =10; // Geri Yon Psif Kontrol =5; } else { Motor_Direction =0;
94 78 EK-4 (Devm) Motor sürücü PIC kynk kodu Psif Yon_Memory =2; PORTD =10; // Geri Yon Kontrol =5; } } else if( Kontrol == 3 && Yon_ChnceCll==1) // Ileri { if (Yon_Memory!= 3) { PWM_PID =0; CCPR1L =0; CCP1CON =12; CCPR2L =0; CCP2CON =12; Motor_Direction =0; DelyMs (250); PORTD =0; DelyMs (250); PORTD =1; Motor_Direction =3; Yon_Memory =3; Kontrol =5; } } else { } PORTD =1; Motor_Direction =3; Yon_Memory =3; Kontrol =5; else if ( Kontrol == 4 && Yon_ChnceCll==1) // Geri { if (Yon_Memory!= 4) { PWM_PID =0; CCPR1L =0; CCP1CON =12; CCPR2L =0; CCP2CON =12; Motor_Direction =0; DelyMs (250); PORTD =2; DelyMs (250); PORTD =6; Motor_Direction =4; Yon_Memory =4;
95 79 EK-4 (Devm) Motor sürücü PIC kynk kodu Kontrol =5; } } else { } PORTD =6; Motor_Direction =4; Yon_Memory =4; Kontrol =5; else if (Kontrol==5) { DelyCounter1 =0; DelyCounter2 =0; Yon_ChnceCll =0; } } void interrupt SeriDtReceive(void) { GIE=0; while(!rcif)communiction_error(); Seri_Dt_Recive = RCREG; Seri_Dt = Seri_Dt_Recive-Seri_Dt_Msk; if (Seri_Dt==10)Dt_No=1; //KONTROL if (Seri_Dt==12)Dt_No=3; //MOTOR HIZ if (Seri_Dt==13)Dt_No=4; //Kp if (Seri_Dt==14)Dt_No=5; //Ki if (Seri_Dt==15)Dt_No=6; //Kd if (Dt_No==1 & Seri_Dt!= 10) { kontrol_temp =Seri_Dt; } MotorHizi_Syc =0; if (Dt_No==3 & Seri_Dt!= 12) { MotorHizi_Syc++; if(motorhizi_syc==1) MotorHizi = Seri_Dt * 1000; if(motorhizi_syc==2) MotorHizi = MotorHizi + Seri_Dt * 100; if(motorhizi_syc==3) MotorHizi = MotorHizi + Seri_Dt * 10; if(motorhizi_syc==4) { MotorHizi = MotorHizi + Seri_Dt; MotorHizi_Syc = 0;
96 80 EK-4 (Devm) Motor sürücü PIC kynk kodu } } 100; 10; 100; 10; 100; 10; if (Dt_No==4 & Seri_Dt!= 13) { MotorHizi_Syc++; if(motorhizi_syc==1) Kp_Temp = Seri_Dt * 1000; if(motorhizi_syc==2) Kp_Temp = Kp_Temp + Seri_Dt * } if(motorhizi_syc==3) Kp_Temp = Kp_Temp + Seri_Dt * if(motorhizi_syc==4) { Kp_Temp = Kp_Temp + Seri_Dt; Kp = Kp_Temp*0.001; MotorHizi_Syc = 0; } if (Dt_No==5 & Seri_Dt!= 14) { MotorHizi_Syc++; if(motorhizi_syc==1) Ki_Temp = Seri_Dt * 1000; if(motorhizi_syc==2) Ki_Temp = Ki_Temp + Seri_Dt * } if(motorhizi_syc==3) Ki_Temp = Ki_Temp + Seri_Dt * if(motorhizi_syc==4) { Ki_Temp = Ki_Temp + Seri_Dt; Ki = Ki_Temp*0.001; MotorHizi_Syc = 0; } if (Dt_No==6 & Seri_Dt!= 15) { MotorHizi_Syc++; if(motorhizi_syc==1) Kd_Temp = Seri_Dt * 1000; if(motorhizi_syc==2) Kd_Temp = Kd_Temp + Seri_Dt * if(motorhizi_syc==3) Kd_Temp = Kd_Temp + Seri_Dt * if(motorhizi_syc==4) { Kd_Temp Kd = Kd_Temp + Seri_Dt; = Kd_Temp*0.001; } } Kontrol =kontrol_temp; MotorHizi_Set = MotorHizi; Yon_ChnceCll =1; MotorHizi_Syc =0;
97 81 EK-4 (Devm) Motor sürücü PIC kynk kodu RCIF =0; GIE =1; } min(void) { TRISA =3; TRISB =0; TRISD =0; TRISE =0; TRISC =128; ADCON1 =0; CCP2CON =12; CCP1CON =12; // T2CON=5; PR2=255; //PWM 4.8KHz /* T2CON=6; // 1.2 KHz PR2=255; */ // PEIE =1; RCIE =1; SPBRG =12; // 12=> BudRte Kbud---> 129=> 9.6 Kbud BRGH =1; SYNC =0; SPEN =1; CREN =1; TX9 =0; RX9 =0; TXEN =0; TXEN =1; RCIF =1; GIE =1; ei(); for(;;) { Adc_Clcultion (); Chnge_Direction (); Forwrd_PWM_Clcultion(); Reverse_PWM_Clcultion(); PC_Hberlesme(); PORTB=Motor_Direction; PORTE=Yon_ChnceCll; } }

98 EK-5 IR2110 MOSFET sürücü entegresi 82

99 EK-5 (Devm) IR2110 MOSFET sürücü entegresi 83

100 EK-5 (Devm) IR2110 MOSFET sürücü entegresi 84

101 EK-6 IRFP460 Güç MOSFET I ktloğu 85

102 EK-6 (Devm) IRFP460 Güç MOSFET I ktloğu 86
103 EK-6 (Devm) IRFP460 Güç MOSFET I ktloğu 87


104 EK-7 PDA cep telefonund elde edilen ekrn değerleri 88
ELEKTRĐK MOTORLARI ve SÜRÜCÜLERĐ DERS 03
 ELEĐ MOOLA ve SÜÜCÜLEĐ DES 03 Özer ŞENYU Mrt 0 ELEĐ MOOLA ve SÜÜCÜLEĐ DA MOOLANN ELEĐ DEE MODELLEĐ E AAEĐSĐLEĐ ENDÜĐ DEESĐ MODELĐ Endüviye uygulnn gerilim (), zıt emk (E), endüvi srgı direni () ile temsil
ELEĐ MOOLA ve SÜÜCÜLEĐ DES 03 Özer ŞENYU Mrt 0 ELEĐ MOOLA ve SÜÜCÜLEĐ DA MOOLANN ELEĐ DEE MODELLEĐ E AAEĐSĐLEĐ ENDÜĐ DEESĐ MODELĐ Endüviye uygulnn gerilim (), zıt emk (E), endüvi srgı direni () ile temsil
Bir Elektrik Motorunun Kısımları. Bir elektrik motorunun parçaları: Rotor, stator içinde döner.
 Bir Elektrik Motorunun Kısımlrı Bir elektrik motorunun prçlrı: Rotor, sttor içinde döner. İki kutuplu bir DA motoru -kutuplu mkinnın kısımlrı ve elemnlrı Dört kutuplu bir DA motoru-endüktör Kutup nüvesi
Bir Elektrik Motorunun Kısımlrı Bir elektrik motorunun prçlrı: Rotor, sttor içinde döner. İki kutuplu bir DA motoru -kutuplu mkinnın kısımlrı ve elemnlrı Dört kutuplu bir DA motoru-endüktör Kutup nüvesi
BAĞIMSIZ UYARILMIŞ DC MOTOR DENEY 325-06
 İNÖNÜ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİKELEKTRONİK MÜH. BÖL. 35 ELEKTRİK MAKİNALARI LABORATUVARI I BAĞIMSIZ UYARILMIŞ DC MOTOR DENEY 3506. AMAÇ: Bğımsız uyrılmış DC motorun moment/hız ve verim
İNÖNÜ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİKELEKTRONİK MÜH. BÖL. 35 ELEKTRİK MAKİNALARI LABORATUVARI I BAĞIMSIZ UYARILMIŞ DC MOTOR DENEY 3506. AMAÇ: Bğımsız uyrılmış DC motorun moment/hız ve verim
6 DC Motorlar. Harici Uyartımlı DC Motor. E a - I V / R K K. i a =i L R a. i f. R f. f f f. a a ind. a a a a a. Tind. ind
 6 DC Motorlr Hrici Uyrtımlı DC Motor i + i =i L R V R E V - V / R K (1) E K E V R (2) K E V R K K K V R (4) K K 2 ( 3) E 1 6 DC Motorlr Hrici Uyrtımlı DC Motor Eğer endüvide üklenen gerilim (E ) ormülünde
6 DC Motorlr Hrici Uyrtımlı DC Motor i + i =i L R V R E V - V / R K (1) E K E V R (2) K E V R K K K V R (4) K K 2 ( 3) E 1 6 DC Motorlr Hrici Uyrtımlı DC Motor Eğer endüvide üklenen gerilim (E ) ormülünde
Telekomünikasyon, bilginin haberleşme amaçlı
 GÜNÜMÜZ HABERLEŞME TEKNOLOJİLERİNE KISA BİR BAKIŞ Mehmet Okty ELDEM Elektronik Y. Mühendisi EMO Ankr Şubesi Üyesi okty.eldem@gmil.com Telekomüniksyon, bilginin hberleşme mçlı olrk dikkte değer bir mesfeye
GÜNÜMÜZ HABERLEŞME TEKNOLOJİLERİNE KISA BİR BAKIŞ Mehmet Okty ELDEM Elektronik Y. Mühendisi EMO Ankr Şubesi Üyesi okty.eldem@gmil.com Telekomüniksyon, bilginin hberleşme mçlı olrk dikkte değer bir mesfeye
B - GERĐLĐM TRAFOLARI:
 ve Seg.Korum_Hldun üyükdor onrım süresinin dh uzun olmsı yrıc rnın izole edilmesini gerektirmesi; rızlnmsı hlinde r tdiltını d gerektireilmesi, v. nedenlerle, özel durumlr dışınd tercih edilmezler. - GERĐLĐM
ve Seg.Korum_Hldun üyükdor onrım süresinin dh uzun olmsı yrıc rnın izole edilmesini gerektirmesi; rızlnmsı hlinde r tdiltını d gerektireilmesi, v. nedenlerle, özel durumlr dışınd tercih edilmezler. - GERĐLĐM
DC ŞÖNT JENERATÖR DENEY
 İNÖNÜ ÜNİVRSİTSİ MÜHNDİSLİK FKÜLTSİ LKTRİKLKTRONİK MÜH. BÖL. 35 LKTRİK MKİNLR LBORTUVR DC ŞÖNT JNRTÖR DNY 3504. MÇ: Şönt bğlnmış DC jenertörün çlışmsını incelemek.. UYGULMLR:. ln kımının şönt bğlı DC jenertörün
İNÖNÜ ÜNİVRSİTSİ MÜHNDİSLİK FKÜLTSİ LKTRİKLKTRONİK MÜH. BÖL. 35 LKTRİK MKİNLR LBORTUVR DC ŞÖNT JNRTÖR DNY 3504. MÇ: Şönt bğlnmış DC jenertörün çlışmsını incelemek.. UYGULMLR:. ln kımının şönt bğlı DC jenertörün
ĐNÖNÜ ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ ELEKTRĐK-ELEKTRONĐK MÜH. BÖL. DC ŞÖNT MOTOR DENEY
 ĐNÖNÜ ÜNĐVRSĐTSĐ MÜHNDĐSLĐK FAKÜLTSĐ LKTRĐK-LKTRONĐK MÜH. BÖL. DC ŞÖNT MOTOR DNY 34-0 1. AMAÇ: Şönt bğlnmış DC motorun moment/hız ve verim krkteristiklerini ve ln kımıyl nsıl değiştiklerini incelemek..
ĐNÖNÜ ÜNĐVRSĐTSĐ MÜHNDĐSLĐK FAKÜLTSĐ LKTRĐK-LKTRONĐK MÜH. BÖL. DC ŞÖNT MOTOR DNY 34-0 1. AMAÇ: Şönt bğlnmış DC motorun moment/hız ve verim krkteristiklerini ve ln kımıyl nsıl değiştiklerini incelemek..
1. Değişkenler ve Eğriler: Matematiksel Hatırlatma
 DERS NOTU 01 Son Hli Değildir, tslktır: Ekleme ve Düzenlemeler Ypılck BİR SOSYAL BİLİM OLARAK İKTİSAT VE TEMEL KAVRAMLAR 1 Bugünki dersin işleniş plnı: 1. Değişkenler ve Eğriler: Mtemtiksel Htırltm...
DERS NOTU 01 Son Hli Değildir, tslktır: Ekleme ve Düzenlemeler Ypılck BİR SOSYAL BİLİM OLARAK İKTİSAT VE TEMEL KAVRAMLAR 1 Bugünki dersin işleniş plnı: 1. Değişkenler ve Eğriler: Mtemtiksel Htırltm...
EKLEMELİ DC KOMPOUND JENERATÖR DENEY 325-05
 İNÖNÜ ÜNİVSİTSİ MÜHNDİSLİK FAKÜLTSİ LKTİKLKTONİK MÜH. BÖL. 35 LKTİK MAKİNALAI LABOATUVAI I KLMLİ DC KOMPOUND JNATÖ DNY 3505. AMAÇ: Kompound bğlnmış DC jenertörün çlışmsını incelemek.. UYGULAMALA:. Yük
İNÖNÜ ÜNİVSİTSİ MÜHNDİSLİK FAKÜLTSİ LKTİKLKTONİK MÜH. BÖL. 35 LKTİK MAKİNALAI LABOATUVAI I KLMLİ DC KOMPOUND JNATÖ DNY 3505. AMAÇ: Kompound bğlnmış DC jenertörün çlışmsını incelemek.. UYGULAMALA:. Yük
KISA MESAFE ERİŞİMLİ TELSİZ (KET) YÖNETMELİĞİ. BİRİNCİ BÖLÜM Amaç, Kapsam, Dayanak, Kısaltmalar ve Tanımlar
 YÖNETMELİĞİ. BİRİNCİ BÖLÜM Amaç, Kapsam, Dayanak, Kısaltmalar ve Tanımlar") 16 Mrt 2007 trihli 26464 syılı Resmi Gzete Telekomüniksyon Kurumundn: KISA MESAFE ERİŞİMLİ TELSİZ (KET) YÖNETMELİĞİ BİRİNCİ BÖLÜM Amç, Kpsm, Dynk, Kısltmlr ve Tnımlr Amç MADDE 1- (1) Bu Yönetmeliğin mcı;
16 Mrt 2007 trihli 26464 syılı Resmi Gzete Telekomüniksyon Kurumundn: KISA MESAFE ERİŞİMLİ TELSİZ (KET) YÖNETMELİĞİ BİRİNCİ BÖLÜM Amç, Kpsm, Dynk, Kısltmlr ve Tnımlr Amç MADDE 1- (1) Bu Yönetmeliğin mcı;
Ankara Üniversitesi Mühendislik Fakültesi, Fizik Mühendisliği Bölümü FZM207. Temel Elektronik-I. Doç. Dr. Hüseyin Sarı
 Ankr Üniversitesi Mühendislik Fkültesi, Fizik Mühendisliği Bölümü FZM207 Temel ElektronikI Doç. Dr. Hüseyin Srı 2. Bölüm: Dirençli Devreler İçerik Temel Yslrın Doğrudn Uygulnışı Kynk Gösterimi ve Dönüşümü
Ankr Üniversitesi Mühendislik Fkültesi, Fizik Mühendisliği Bölümü FZM207 Temel ElektronikI Doç. Dr. Hüseyin Srı 2. Bölüm: Dirençli Devreler İçerik Temel Yslrın Doğrudn Uygulnışı Kynk Gösterimi ve Dönüşümü
Anadolu Üniversitesi Mühendislik Fakültesi Endüstri Mühendisliği Bölümü. Doç. Dr. Nil ARAS ENM411 Tesis Planlaması 2015-2016 Güz Dönemi
 Andolu Üniversitesi Mühendislik Fkültesi Endüstri Mühendisliği Bölümü Doç. Dr. Nil ARAS ENM411 Tesis Plnlmsı 2015-2016 Güz Dönemi 2 Tesis (fcility) Tesis : Belli bir iş için kurulmuş ypı Tesis etmek :
Andolu Üniversitesi Mühendislik Fkültesi Endüstri Mühendisliği Bölümü Doç. Dr. Nil ARAS ENM411 Tesis Plnlmsı 2015-2016 Güz Dönemi 2 Tesis (fcility) Tesis : Belli bir iş için kurulmuş ypı Tesis etmek :
FRENLER 25.02.2012 FRENLERİN SINIFLANDIRILMASI
 RENLER RENLER renler çlışmlrı itiriyle kvrmlr enzerler. Kvrmlr ir hreketin vey momentin diğer trf iletilmesini sğlrlr ve kıs ir süre içinde iki trftki hızlr iririne eşit olur. renler ise ir trftki hreketi
RENLER RENLER renler çlışmlrı itiriyle kvrmlr enzerler. Kvrmlr ir hreketin vey momentin diğer trf iletilmesini sğlrlr ve kıs ir süre içinde iki trftki hızlr iririne eşit olur. renler ise ir trftki hreketi
İstatistik I Bazı Matematik Kavramlarının Gözden
 İsttistik I Bzı Mtemtik Kvrmlrının Gözden Geçirilmesi Hüseyin Tştn Ağustos 13, 2006 İçindekiler 1 Toplm İşlemcisi 2 2 Çrpım İşlemcisi 6 3 Türev 7 3.1 Türev Kurllrı.......................... 8 3.1.1 Sbit
İsttistik I Bzı Mtemtik Kvrmlrının Gözden Geçirilmesi Hüseyin Tştn Ağustos 13, 2006 İçindekiler 1 Toplm İşlemcisi 2 2 Çrpım İşlemcisi 6 3 Türev 7 3.1 Türev Kurllrı.......................... 8 3.1.1 Sbit
İŞ ETKİ ÇİZGİSİ TEOREMİ. Balıkesir Üniversitesi Mühendislik Mimarlık Fakültesi İnşaat Müh. Bölümü Balıkesir, TÜRKİYE THEOREM OF WORK INFLUENCE LINE
 BAÜ Fen Bil. Enst. Dergisi (006).8. İŞ ETKİ ÇİZGİSİ TEOREMİ Scit OĞUZ, Perihn (Krkulk) EFE Blıkesir Üniversitesi Mühendislik Mimrlık Fkültesi İnşt Müh. Bölümü Blıkesir, TÜRKİYE ÖZET Bu çlışmd İş Etki Çizgisi
BAÜ Fen Bil. Enst. Dergisi (006).8. İŞ ETKİ ÇİZGİSİ TEOREMİ Scit OĞUZ, Perihn (Krkulk) EFE Blıkesir Üniversitesi Mühendislik Mimrlık Fkültesi İnşt Müh. Bölümü Blıkesir, TÜRKİYE ÖZET Bu çlışmd İş Etki Çizgisi
İntegral Uygulamaları
 İntegrl Uygulmlrı Yzr Prof.Dr. Vkıf CAFEROV ÜNİTE Amçlr Bu üniteyi çlıştıktn sonr; düzlemsel ln ve dönel cisimlerin cimlerinin elirli integrl yrdımı ile esplnileceğini, küre, koni ve kesik koninin cim
İntegrl Uygulmlrı Yzr Prof.Dr. Vkıf CAFEROV ÜNİTE Amçlr Bu üniteyi çlıştıktn sonr; düzlemsel ln ve dönel cisimlerin cimlerinin elirli integrl yrdımı ile esplnileceğini, küre, koni ve kesik koninin cim
Mıknatıs mantığında oluşan N S Kutuplaşması kullanılarak N kutbu tarafına S kutbu gelecek vada S kutbu tarafında N kutbu gelecek şekilde akımın yönü
 1. DC MOTORLAR Mntık olrk bobin üzerinden geçen kıın sonucund oluşturduğu ğnetik kçklr syesinde oluşturduğu kutuplşyı ileri ve geri yönlü olrk kullnrk yni zıt kutuplrın çekesi vd ynı kutuplrın birbirini
1. DC MOTORLAR Mntık olrk bobin üzerinden geçen kıın sonucund oluşturduğu ğnetik kçklr syesinde oluşturduğu kutuplşyı ileri ve geri yönlü olrk kullnrk yni zıt kutuplrın çekesi vd ynı kutuplrın birbirini
Montaj kılavuzu. Entegre hidrolik bileşenlere sahip dış üniteler için seçenek kutusu EK2CB07CAV3. Montaj kılavuzu. Türkçe
 Montj kılvuzu Entegre hidrolik bileşenlere ship dış üniteler için seçenek kutusu EKCB07CAV Montj kılvuzu Entegre hidrolik bileşenlere ship dış üniteler için seçenek kutusu Türkçe İçindekiler İçindekiler
Montj kılvuzu Entegre hidrolik bileşenlere ship dış üniteler için seçenek kutusu EKCB07CAV Montj kılvuzu Entegre hidrolik bileşenlere ship dış üniteler için seçenek kutusu Türkçe İçindekiler İçindekiler
BAĞIMSIZ UYARILMIŞ DC JENERATÖR DENEY
 İNÖNÜ ÜNİVRSİTSİ MÜHNDİSLİK FAKÜLTSİ LKTRİKLKTRONİK MÜH. BÖL. 35 LKTRİK MAKİNALARI LABORATUVARI I BAĞIMSIZ UYARILMIŞ DC JNRATÖR DNY 3503. AMAÇ: Bğımsız uyrılmış DC jenertörün çlışmsını incelemek.. UYGULAMALAR:.
İNÖNÜ ÜNİVRSİTSİ MÜHNDİSLİK FAKÜLTSİ LKTRİKLKTRONİK MÜH. BÖL. 35 LKTRİK MAKİNALARI LABORATUVARI I BAĞIMSIZ UYARILMIŞ DC JNRATÖR DNY 3503. AMAÇ: Bğımsız uyrılmış DC jenertörün çlışmsını incelemek.. UYGULAMALAR:.
3N MOBİL HABERLEŞME HİZMETLERİNDE HİZMET KALİTESİ ÖLÇÜTLERİNİN ELDE EDİLMESİNE İLİŞKİN TEBLİĞ
 3N MOBİL HABERLEŞME HİZMETLERİNDE HİZMET KALİTESİ ÖLÇÜTLERİNİN ELDE EDİLMESİNE İLİŞKİN TEBLİĞ BİRİNCİ BÖLÜM Aç, Kps, Dynk, Tnılr ve Kısltlr Aç MADDE 1 (1) Bu Tebliğin cı, IMT 2000/UMTS Altypılrının Kurulsı
3N MOBİL HABERLEŞME HİZMETLERİNDE HİZMET KALİTESİ ÖLÇÜTLERİNİN ELDE EDİLMESİNE İLİŞKİN TEBLİĞ BİRİNCİ BÖLÜM Aç, Kps, Dynk, Tnılr ve Kısltlr Aç MADDE 1 (1) Bu Tebliğin cı, IMT 2000/UMTS Altypılrının Kurulsı
DENEY 6 THEVENIN, NORTON, DOĞRUSALLIK VE TOPLAMSALLIK KURAMLARININ UYGULAMALARI
 T.C. Mltepe Üniversitesi Mühendislik ve Doğ Bilimleri Fkültesi Elektrik-Elektronik Mühendisliği Bölümü ELK 201 DEVRE TEORİSİ DERSİ LABORATUVARI DENEY 6 THEVENIN, NORTON, DOĞRUSALLIK VE TOPLAMSALLIK KURAMLARININ
T.C. Mltepe Üniversitesi Mühendislik ve Doğ Bilimleri Fkültesi Elektrik-Elektronik Mühendisliği Bölümü ELK 201 DEVRE TEORİSİ DERSİ LABORATUVARI DENEY 6 THEVENIN, NORTON, DOĞRUSALLIK VE TOPLAMSALLIK KURAMLARININ
4- SAYISAL İNTEGRAL. c ϵ R olmak üzere F(x) fonksiyonunun türevi f(x) ise ( F (x) = f(x) ); denir. f(x) fonksiyonu [a,b] R için sürekli ise;
![4- SAYISAL İNTEGRAL. c ϵ R olmak üzere F(x) fonksiyonunun türevi f(x) ise ( F (x) = f(x) ); denir. f(x) fonksiyonu [a,b] R için sürekli ise;](/thumbs/24/3918052.jpg "4- SAYISAL İNTEGRAL. c ϵ R olmak üzere F(x) fonksiyonunun türevi f(x) ise ( F (x) = f(x) ); denir. f(x) fonksiyonu [a,b] R için sürekli ise;") 4- SAYISAL İNTEGRAL c ϵ R olmk üzere F() onksiyonunun türevi () ise ( F () = () ); Z ` A d F ` c eşitliğindeki F()+c idesine, () onksiyonunun elirsiz integrli denir. () onksiyonu [,] R için sürekli ise;
4- SAYISAL İNTEGRAL c ϵ R olmk üzere F() onksiyonunun türevi () ise ( F () = () ); Z ` A d F ` c eşitliğindeki F()+c idesine, () onksiyonunun elirsiz integrli denir. () onksiyonu [,] R için sürekli ise;
DOĞRU AKIM MAKİNELERİ
 DOĞRU AKIM MAKİNELERİ 3.1 Doğru Akım Mkinelerinin Ypısı Doğru kım mkineleri ypısl çıdn diğer elektrik mkineleri krşılştırıldığınd dh bsit bir görüntü sergilemektedir. Mkinede durn kısımdn oluşn ve sttor
DOĞRU AKIM MAKİNELERİ 3.1 Doğru Akım Mkinelerinin Ypısı Doğru kım mkineleri ypısl çıdn diğer elektrik mkineleri krşılştırıldığınd dh bsit bir görüntü sergilemektedir. Mkinede durn kısımdn oluşn ve sttor
RASYONEL SAYILAR KESİR ÇEŞİTLERİ. www.unkapani.com.tr. 1. Basit Kesir. olduğuna göre, a, b tamsayı ve b 0 olmak üzere, a şeklindeki ifadelere
 RASYONEL SAYILAR, tmsyı ve 0 olmk üzere, şeklindeki ifdelere kesir denir. y kesrin pyı, ye kesrin pydsı denir. Örneğin,,,, kesirdir. kesrinde, py kesir çizgisi pyd, 0, 0 ise 0 0 dır.,, 0, syılrı irer 0
RASYONEL SAYILAR, tmsyı ve 0 olmk üzere, şeklindeki ifdelere kesir denir. y kesrin pyı, ye kesrin pydsı denir. Örneğin,,,, kesirdir. kesrinde, py kesir çizgisi pyd, 0, 0 ise 0 0 dır.,, 0, syılrı irer 0
Basınç Elemanları Elastik ve inelastik burkulma Etkili Boy. Bölüm 4. Yrd. Doç. Dr. Muharrem Aktaş 2009-Bahar
 Bsınç Elemnlrı Elstik ve inelstik burkulm Etkili Boy Bölüm 4 Yrd. Doç. Dr. Muhrrem Aktş 009-Bhr Yısl çelik elemnlrının, eğilme momenti olmksızın sdece eksenel bsınç kuvveti ltınd olduğu durumlr vrdır.
Bsınç Elemnlrı Elstik ve inelstik burkulm Etkili Boy Bölüm 4 Yrd. Doç. Dr. Muhrrem Aktş 009-Bhr Yısl çelik elemnlrının, eğilme momenti olmksızın sdece eksenel bsınç kuvveti ltınd olduğu durumlr vrdır.
Montaj kılavuzu. Daikin Altherma düşük sıcaklıklı monoblok seçenek kutusu EK2CB07CAV3. Montaj kılavuzu. Türkçe
 Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu EKCB07CAV Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu Türkçe İçindekiler İçindekiler Dokümnlr hkkınd. Bu dokümn
Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu EKCB07CAV Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu Türkçe İçindekiler İçindekiler Dokümnlr hkkınd. Bu dokümn
DENEY 3: EŞDEĞER DİRENÇ, VOLTAJ VE AKIM ÖLÇÜMÜ
 A. DENEYĠN AMACI : Direnç devrelerinde eşdeğer direnç ölçümü ypmk. Multimetre ile voltj ve kım ölçümü ypmk. Ohm knununu sit ve prtik devrelerde nlmy çlışmk. B. KULLANILACAK AAÇ VE MALZEMELE : 1. DC güç
A. DENEYĠN AMACI : Direnç devrelerinde eşdeğer direnç ölçümü ypmk. Multimetre ile voltj ve kım ölçümü ypmk. Ohm knununu sit ve prtik devrelerde nlmy çlışmk. B. KULLANILACAK AAÇ VE MALZEMELE : 1. DC güç
SAYISAL ÇÖZÜMLEME. Sayısal Çözümleme
 SYISL ÇÖZÜMLEME Syısl Çözümleme SYISL ÇÖZÜMLEME Hft SYISL ÇÖZÜMLEMEDE HT KVRMI Syısl Çözümleme GİRİŞ Syısl nliz, mtemtik problemlerinin bilgisyr yrdımı ile çözümlenme tekniğidir Genellikle nlitik olrk
SYISL ÇÖZÜMLEME Syısl Çözümleme SYISL ÇÖZÜMLEME Hft SYISL ÇÖZÜMLEMEDE HT KVRMI Syısl Çözümleme GİRİŞ Syısl nliz, mtemtik problemlerinin bilgisyr yrdımı ile çözümlenme tekniğidir Genellikle nlitik olrk
63032 / 63932 ELEKTRONİK SICAKLIK KONTROL CİHAZI KULLANIM KILAVUZU
 63032 / 63932 ELEKTRONİK SICAKLIK KONTROL CİHAZI KULLANIM KILAVUZU www.omk.com.tr 01.08.2014 V3185 / V4185 VARİL ISITICISI KULLANIM KILAVUZU OMAK MAKİNA SANAYİİ ve TİCARET LİMİTED ŞİRKETİ DR. MEDİHA ELDEM
63032 / 63932 ELEKTRONİK SICAKLIK KONTROL CİHAZI KULLANIM KILAVUZU www.omk.com.tr 01.08.2014 V3185 / V4185 VARİL ISITICISI KULLANIM KILAVUZU OMAK MAKİNA SANAYİİ ve TİCARET LİMİTED ŞİRKETİ DR. MEDİHA ELDEM
Montaj kılavuzu. Daikin Altherma düşük sıcaklıklı monoblok seçenek kutusu EK2CB07CAV3. Montaj kılavuzu. Türkçe
 Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu EKCB07CAV Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu Türkçe İçindekiler İçindekiler Dokümnlr hkkınd. Bu dokümn
Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu EKCB07CAV Montj kılvuzu Dikin Altherm düşük sıcklıklı monoblok seçenek kutusu Türkçe İçindekiler İçindekiler Dokümnlr hkkınd. Bu dokümn
GERİ KARIŞMALI ph NÖTRALİZASYON PROSESİNİN BİLGİSAYAR DESTEKLİ KONTROLÜ
 GERİ KARIŞMALI ph NÖTRALİZASYON PROSESİNİN BİLGİSAYAR DESTEKLİ KONTROLÜ Onur Ömer SÖĞÜT*, A. Fruk BAKAN**, Mesut AKGÜN* * YTÜ Dvutpş Kmpüsü, Kimy Mühendisliği Bölümü, 34210 Esenler, İstnul **YTÜ Elektrik
GERİ KARIŞMALI ph NÖTRALİZASYON PROSESİNİN BİLGİSAYAR DESTEKLİ KONTROLÜ Onur Ömer SÖĞÜT*, A. Fruk BAKAN**, Mesut AKGÜN* * YTÜ Dvutpş Kmpüsü, Kimy Mühendisliği Bölümü, 34210 Esenler, İstnul **YTÜ Elektrik
Double solenoid vana Nominal çap Rp 3/8 - Rp 2 DMV-D/11 DMV-DLE/11
 Double solenoid vn Nominl çp 3/8 - DMV-D/11 DMV-DLE/11 7.30 Printed in Germny Edition 11.13 Nr. 253 071 1 6 Teknik DUNGS double solenoid vn DMV, iki mnyetik vlin tek bir kompkt rmtür içinde entere edilmiş
Double solenoid vn Nominl çp 3/8 - DMV-D/11 DMV-DLE/11 7.30 Printed in Germny Edition 11.13 Nr. 253 071 1 6 Teknik DUNGS double solenoid vn DMV, iki mnyetik vlin tek bir kompkt rmtür içinde entere edilmiş
İKİNCİ DERECEDEN DENKLEMLER
 İKİNCİ DERECEDEN DENKLEMLER İKİNCİ DERECEDEN BİR BİLİNMEYENLİ DENKLEMLER TANIMLAR :, b, R ve 0 olmk üzere denklem denir. b = 0 denklemine, ikini dereeden bir bilinmeyenli Bu denklemde, b, gerçel syılrın
İKİNCİ DERECEDEN DENKLEMLER İKİNCİ DERECEDEN BİR BİLİNMEYENLİ DENKLEMLER TANIMLAR :, b, R ve 0 olmk üzere denklem denir. b = 0 denklemine, ikini dereeden bir bilinmeyenli Bu denklemde, b, gerçel syılrın
Patlama korumalı ek termostat
 E-mil: Fx: +49 661 6003-607 www.jumo.net www.jumo.us Veri Syfsı 605051 Syf 1/7 Ptlm korumlı ek termostt Tip ATH-EXx Serisi Özellikler 10 A kontk derecesi Bölge 1, 2, 21 ve 22'de doğrudn yerleştirilebilir
E-mil: Fx: +49 661 6003-607 www.jumo.net www.jumo.us Veri Syfsı 605051 Syf 1/7 Ptlm korumlı ek termostt Tip ATH-EXx Serisi Özellikler 10 A kontk derecesi Bölge 1, 2, 21 ve 22'de doğrudn yerleştirilebilir
SAYILARIN ÇÖZÜMLENMESĐ ve BASAMAK KAVRAMI
 YILLAR 00 00 004 00 006 007 008 009 010 011 ÖSS-YGS - 1 - - 1-1 1 SAYILARIN ÇÖZÜMLENMESĐ ve BASAMAK KAVRAMI,b,c,d birer rkm olmk üzere ( 0) b = 10 + b bc = 100+10+b bc = 100+10b+c bcd =1000+100b+10c+d
YILLAR 00 00 004 00 006 007 008 009 010 011 ÖSS-YGS - 1 - - 1-1 1 SAYILARIN ÇÖZÜMLENMESĐ ve BASAMAK KAVRAMI,b,c,d birer rkm olmk üzere ( 0) b = 10 + b bc = 100+10+b bc = 100+10b+c bcd =1000+100b+10c+d
1 a) TEVENİN (THEVENIN) TEOREMİNİN DENEYSEL OLARAK DOĞRULANMASI. Amaç: Tevenin teoremini doğrulamak ve yük direnci üzerinden akan akımı bulmak.
 TEVENİN (THEVENIN) TEOREMİNİN DENEYSEL OLARAK DOĞRULANMASI. Amaç: Tevenin teoremini doğrulamak ve yük direnci üzerinden akan akımı bulmak.") 1 ) TEVENİN (THEVENIN) TEOREMİNİN DENEYSEL OLARAK DOĞRULANMASI Amç: Tevenin teoremini doğrulmk ve yük direnci üzerinden kn kımı ulmk. Gerekli Ekipmnlr: DA Güç Kynğı, Ampermetre, Voltmetre, Dirençler, Dizilim
1 ) TEVENİN (THEVENIN) TEOREMİNİN DENEYSEL OLARAK DOĞRULANMASI Amç: Tevenin teoremini doğrulmk ve yük direnci üzerinden kn kımı ulmk. Gerekli Ekipmnlr: DA Güç Kynğı, Ampermetre, Voltmetre, Dirençler, Dizilim
1) Asgari sayıda çevre akımları ve bilinmeyen tanımlayarak değerlerini bulunuz ve güç dengesini sağladığını gösteriniz.
 Asgari sayıda çevre akımları ve bilinmeyen tanımlayarak değerlerini bulunuz ve güç dengesini sağladığını gösteriniz.") ELEKTRİK-ELEKTRONİK DERSİ VİZE SORU ÖRNEKLERİ Şekiller üzerindeki renkli işretlemeler soruy değil çözüme ittir: Mviler ilk şmd sgri bğımsız denklem çözmek için ypıln tnımlrı, Kırmızılr sonrki şmd güç dengesi
ELEKTRİK-ELEKTRONİK DERSİ VİZE SORU ÖRNEKLERİ Şekiller üzerindeki renkli işretlemeler soruy değil çözüme ittir: Mviler ilk şmd sgri bğımsız denklem çözmek için ypıln tnımlrı, Kırmızılr sonrki şmd güç dengesi
ASAL SAYILAR. Asal Sayılar YILLAR MATEMATĐK ĐM
 YILLAR 00 003 004 00 006 007 008 009 00 0 ÖSS-YGS - - - - - - - ASAL SAYILAR ve kendisinden bşk pozitif böleni olmyn den büyük tmsyılr sl syı denir Negtif ve ondlıklı syılr sl olmz Asl syılrı veren bir
YILLAR 00 003 004 00 006 007 008 009 00 0 ÖSS-YGS - - - - - - - ASAL SAYILAR ve kendisinden bşk pozitif böleni olmyn den büyük tmsyılr sl syı denir Negtif ve ondlıklı syılr sl olmz Asl syılrı veren bir
η= 1 kn c noktasında iken A mesnedinin mesnet tepkisi (VA)
") ölüm Đzosttik-Hipersttik-Elstik Şekil Değiştirme TESİR ÇİZGİSİ ÖRNEKLERİ Ypı sistemlerinin mruz kldığı temel yükler sit ve hreketli yüklerdir. Sit yükler için çözümler önceki konulrd ypılmıştır. Hreketli
ölüm Đzosttik-Hipersttik-Elstik Şekil Değiştirme TESİR ÇİZGİSİ ÖRNEKLERİ Ypı sistemlerinin mruz kldığı temel yükler sit ve hreketli yüklerdir. Sit yükler için çözümler önceki konulrd ypılmıştır. Hreketli
a a a a a a www.inka-paletten.com P A L E T Y P A L E T Ahşap paletlerle rekabet edebilir fiyattadır İç içe geçebildiğinden daha az stok yeri tutar
 Y P A L E T Ahşp pletlerle rekbet edebilir fiyttdır İç içe geçebildiğinden dh z stok yeri tutr Konteynırlr uygun ebtlr CP3, CP5 Çevreyle Dost Düny çpınd kıs sürede teslimt Isıl işlem,fümigsyon gerektirmez,
Y P A L E T Ahşp pletlerle rekbet edebilir fiyttdır İç içe geçebildiğinden dh z stok yeri tutr Konteynırlr uygun ebtlr CP3, CP5 Çevreyle Dost Düny çpınd kıs sürede teslimt Isıl işlem,fümigsyon gerektirmez,
İntegralin Uygulamaları
 Bölüm İntegrlin Uygulmlrı. Aln f ve g, [, b] rlığındki her x için f(x) g(x) eşitsizliğini sğlyn sürekli fonksiyonlr olmk üzere y = f(x), y = g(x) eğrileri, x = ve x = b düşey doğrulrı rsındki S bölgesini
Bölüm İntegrlin Uygulmlrı. Aln f ve g, [, b] rlığındki her x için f(x) g(x) eşitsizliğini sğlyn sürekli fonksiyonlr olmk üzere y = f(x), y = g(x) eğrileri, x = ve x = b düşey doğrulrı rsındki S bölgesini
VEKTÖRLER ÜNİTE 5. ÜNİTE 5. ÜNİTE 5. ÜNİTE 5. ÜNİT
 VKTÖRLR ÜNİT 5. ÜNİT 5. ÜNİT 5. ÜNİT 5. ÜNİT VKTÖRLR 1. Kznım : Vektör kvrmını çıklr.. Kznım : İki vektörün toplmını ve vektörün ir gerçek syıyl çrpımını ceirsel ve geometrik olrk gösterir. VKTÖRLR 1.
VKTÖRLR ÜNİT 5. ÜNİT 5. ÜNİT 5. ÜNİT 5. ÜNİT VKTÖRLR 1. Kznım : Vektör kvrmını çıklr.. Kznım : İki vektörün toplmını ve vektörün ir gerçek syıyl çrpımını ceirsel ve geometrik olrk gösterir. VKTÖRLR 1.
DENEY 6. İki Kapılı Devreler
 004 hr ULUDĞ ÜNİVERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ ELN04 Elektrik Devreleri Lorturı II 004 hr DENEY 6 İki Kpılı Devreler Deneyi Ypnın Değerlendirme dı Soydı : Ön Hzırlık
004 hr ULUDĞ ÜNİVERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ ELN04 Elektrik Devreleri Lorturı II 004 hr DENEY 6 İki Kpılı Devreler Deneyi Ypnın Değerlendirme dı Soydı : Ön Hzırlık
ÜNİTE - 7 POLİNOMLAR
 ÜNİTE - 7 BÖLÜM Polinomlr (Temel Kvrmlr) -. p() = 3 + n 6 ifdesi bir polinom belirttiğine göre n en z 5. p( + ) = + 4 + Test - olduğun göre, p() polinomunun ktsyılr toplmı p() polinomund terimlerin kuvvetleri
ÜNİTE - 7 BÖLÜM Polinomlr (Temel Kvrmlr) -. p() = 3 + n 6 ifdesi bir polinom belirttiğine göre n en z 5. p( + ) = + 4 + Test - olduğun göre, p() polinomunun ktsyılr toplmı p() polinomund terimlerin kuvvetleri
EasyMP Multi PC Projection Kullanım Kılavuzu
 EsyMP Multi PC Projection Kullnım Kılvuzu İçindekiler 2 EsyMP Multi PC Projection Uygulmsın Giriş EsyMP Multi PC Projection Uygulmsının Özellikleri... 5 Çeşitli Aygıtlr Bğlntı... 5 Dört Pnelli Ekrn...5
EsyMP Multi PC Projection Kullnım Kılvuzu İçindekiler 2 EsyMP Multi PC Projection Uygulmsın Giriş EsyMP Multi PC Projection Uygulmsının Özellikleri... 5 Çeşitli Aygıtlr Bğlntı... 5 Dört Pnelli Ekrn...5
VESTEL TERMOSÝFON TRV65M - TRV80M / TRV65E - TRV80E GARANTÝ 2 YIL
 VESTEL TERMOSÝFON TRV65M - TRV80M / TRV65E - TRV80E GARANTÝ 2 YIL DANIÞMA MERKEZi: Cihzın TC.Gümrük ve Ticret bknlığı ve bknlıkç tespit ve iln edilen kullnım ömrü (cihzın fonksiyonlrını yerine getirebilmesi
VESTEL TERMOSÝFON TRV65M - TRV80M / TRV65E - TRV80E GARANTÝ 2 YIL DANIÞMA MERKEZi: Cihzın TC.Gümrük ve Ticret bknlığı ve bknlıkç tespit ve iln edilen kullnım ömrü (cihzın fonksiyonlrını yerine getirebilmesi
THÉVENİN, NORTON, MAKSİMUM GÜÇ TEOREMİ ve DEVRE PARAMETRELERİ
 DENEY NO: 4 THÉENİN, NORTON, MAKSİMUM GÜÇ TEOREMİ ve DERE PARAMETRELERİ Mlzeme ve Cihz Litei:. 330 direnç det. k direnç 3 det 3.. k direnç det 4. 3.3 k direnç det 5. 5.6 k direnç det 6. 0 k direnç det
DENEY NO: 4 THÉENİN, NORTON, MAKSİMUM GÜÇ TEOREMİ ve DERE PARAMETRELERİ Mlzeme ve Cihz Litei:. 330 direnç det. k direnç 3 det 3.. k direnç det 4. 3.3 k direnç det 5. 5.6 k direnç det 6. 0 k direnç det
DENEY 2 Wheatstone Köprüsü
 0-05 Güz ULUDĞ ÜNİESİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTİK-ELEKTONİK MÜHENDİSLİĞİ ÖLÜMÜ EEM0 Elektrik Devreleri Lorturı I 0-05 DENEY Whetstone Köprüsü Deneyi Ypnın Değerlendirme dı Soydı : Deney Sonuçlrı (0/00)
0-05 Güz ULUDĞ ÜNİESİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTİK-ELEKTONİK MÜHENDİSLİĞİ ÖLÜMÜ EEM0 Elektrik Devreleri Lorturı I 0-05 DENEY Whetstone Köprüsü Deneyi Ypnın Değerlendirme dı Soydı : Deney Sonuçlrı (0/00)
Prizmatik Katsayıyı Değiştirmek için 1 Eksi Prizmatik Yöntemi
 4... rizmtik Ktsyıyı Değiştirmek için 1 Eksi rizmtik Yöntemi Verilen bir gemi ile ynı n boyutlr ve orm özelliklerine sip oln bir gemiye it tekne ormundn reket ederek LB konumu sbit klck vey istenen bir
4... rizmtik Ktsyıyı Değiştirmek için 1 Eksi rizmtik Yöntemi Verilen bir gemi ile ynı n boyutlr ve orm özelliklerine sip oln bir gemiye it tekne ormundn reket ederek LB konumu sbit klck vey istenen bir
KISA MESAFE ERİŞİMLİ TELSİZ (KET) CİHAZLARI HAKKINDA YÖNETMELİK. BİRİNCİ BÖLÜM Amaç, Kapsam, Dayanak, Kısaltmalar ve Tanımlar
 CİHAZLARI HAKKINDA YÖNETMELİK. BİRİNCİ BÖLÜM Amaç, Kapsam, Dayanak, Kısaltmalar ve Tanımlar") 11 Eylül 2012 SALI Resmî Gzete Syı : 28408 YÖNETMELİK Bilgi Teknolojileri ve İletişim Kurumundn: KISA MESAFE ERİŞİMLİ TELSİZ (KET) CİHAZLARI HAKKINDA YÖNETMELİK BİRİNCİ BÖLÜM Amç, Kpsm, Dynk, Kısltmlr
11 Eylül 2012 SALI Resmî Gzete Syı : 28408 YÖNETMELİK Bilgi Teknolojileri ve İletişim Kurumundn: KISA MESAFE ERİŞİMLİ TELSİZ (KET) CİHAZLARI HAKKINDA YÖNETMELİK BİRİNCİ BÖLÜM Amç, Kpsm, Dynk, Kısltmlr
ELEKTRİK DAĞITIM ȘİRKETLERİNİN SORUMLULUĞUNDAKİ YOL AYDINLATMASINA İLİȘKİN KURALLARIN İRDELENMESİ
 ELEKTRİK DAĞITIM ȘİRKETLERİNİN SORUMLULUĞUNDAKİ YOL AYDINLATMASINA İLİȘKİN KURALLARIN İRDELENMESİ M. Akif ȘENOL 1 Ercüment ÖZDEMİRCİ 2 M. Cengiz TAPLAMACIOĞLU 3 1 Enerji ve Tbii Kynklr Bknlığı, Ankr, 2
ELEKTRİK DAĞITIM ȘİRKETLERİNİN SORUMLULUĞUNDAKİ YOL AYDINLATMASINA İLİȘKİN KURALLARIN İRDELENMESİ M. Akif ȘENOL 1 Ercüment ÖZDEMİRCİ 2 M. Cengiz TAPLAMACIOĞLU 3 1 Enerji ve Tbii Kynklr Bknlığı, Ankr, 2
İnşaat Sektörüne Özgü İş Güvenliği Yönetim Sisteminin Aksiyomatik Tasarım İlkeleriyle Oluşturulması
 İnşt Sektörüne Özgü İş Güvenliği Yönetim Sisteminin Aksiyomtik Tsrım İlkeleriyle Oluşturulmsı Öğr. Gr. Mert UZUN (mertuzunn@gmil.com) Doç. Dr. Selçuk ÇEBİ (scebi@yildiz.edu.tr) İçindekiler Amç Yöntem Bulgulr
İnşt Sektörüne Özgü İş Güvenliği Yönetim Sisteminin Aksiyomtik Tsrım İlkeleriyle Oluşturulmsı Öğr. Gr. Mert UZUN (mertuzunn@gmil.com) Doç. Dr. Selçuk ÇEBİ (scebi@yildiz.edu.tr) İçindekiler Amç Yöntem Bulgulr
TYT / MATEMATİK Deneme - 6
 . Herbir hücrenin sol üst köşesinde kreler içine yzıln syılrın işlemin sonucunu verdiğine dikkt ederek syılrı yerleştirmeliyiz. 7 6 T N M 5 6 T X. ^ h ^ h bulur. M N. 0 6 6 6 0 5 5 5 6 6 5 5 ^5h ^5h ^h
. Herbir hücrenin sol üst köşesinde kreler içine yzıln syılrın işlemin sonucunu verdiğine dikkt ederek syılrı yerleştirmeliyiz. 7 6 T N M 5 6 T X. ^ h ^ h bulur. M N. 0 6 6 6 0 5 5 5 6 6 5 5 ^5h ^5h ^h
SLOGAN TİPOGRAFİSİ O PREFABRİK YAPILAR İNŞAAT SANAYİ VE TİCARET ANONİM ŞİRKETİ PAL. www.opalon.com.tr
 SLOGAN TİPOGRAFİSİ www.oplon.com.tr PAL O ON PREFABRİK YAPILAR İNŞAAT SANAYİ VE TİCARET ANONİM ŞİRKETİ www.oplon.com.tr OPAL ON PREFABRİK YAPILAR İNŞAAT SANAYİ VE TİCARET ANONİM ŞİRKETİ www.oplon.com.tr
SLOGAN TİPOGRAFİSİ www.oplon.com.tr PAL O ON PREFABRİK YAPILAR İNŞAAT SANAYİ VE TİCARET ANONİM ŞİRKETİ www.oplon.com.tr OPAL ON PREFABRİK YAPILAR İNŞAAT SANAYİ VE TİCARET ANONİM ŞİRKETİ www.oplon.com.tr
TIKIZ ŞEKİL BETİMLEYİCİLERİ
 TIIZ ŞEİL BETİMLEYİCİLERİ Nfiz ARICA ve Ftoş YARMAN-VURAL Bildiri onusu : İMGE İŞLEME Sorumlu Yzr : Ftoş T. YARMAN-VURAL Adres : Bilgisyr Mühendisliği Bölümü Ort Doğu Teknik Üniversitesi 653 Eskişehir
TIIZ ŞEİL BETİMLEYİCİLERİ Nfiz ARICA ve Ftoş YARMAN-VURAL Bildiri onusu : İMGE İŞLEME Sorumlu Yzr : Ftoş T. YARMAN-VURAL Adres : Bilgisyr Mühendisliği Bölümü Ort Doğu Teknik Üniversitesi 653 Eskişehir
ARABA BENZERİ GEZGİN ROBOTUN OTOMATİK PARK ETMESİ İÇİN BİR YÖNTEM
 ARABA BENZERİ GEZGİN ROBOTUN OTOMATİK PARK ETMESİ İÇİN BİR YÖNTEM Burk Uzkent Osmn Prlktun Elektrik-Elektronik Mühendisliği Bölümü Eskişehir Osmngzi Üniversitesi, Eskişehir uzkent.burk@gmil.com oprlk@ogu.edu.tr
ARABA BENZERİ GEZGİN ROBOTUN OTOMATİK PARK ETMESİ İÇİN BİR YÖNTEM Burk Uzkent Osmn Prlktun Elektrik-Elektronik Mühendisliği Bölümü Eskişehir Osmngzi Üniversitesi, Eskişehir uzkent.burk@gmil.com oprlk@ogu.edu.tr
Çevre ve Alan. İlköğretim 6. Sınıf
 Çevre ve Aln İlköğretim 6. Sınıf Çevre Merhb,ilk olrk seninle birlikte evin çevresini bulmy çlışlım Kırmızı çizgiler evin çevre uzunluğunu verir. Çevre Şimdi sır futbol shsınd Çevre Şimdi,Keloğlnın Pmuk
Çevre ve Aln İlköğretim 6. Sınıf Çevre Merhb,ilk olrk seninle birlikte evin çevresini bulmy çlışlım Kırmızı çizgiler evin çevre uzunluğunu verir. Çevre Şimdi sır futbol shsınd Çevre Şimdi,Keloğlnın Pmuk
KIVIRMA İŞLEMİNİN ŞEKİL ve BOYUTLARI
 2011 Şut KIVIRMA İŞEMİNİN ŞEKİ ve BOYUTARI Hzırlyn: Adnn YIMAZ AÇINIM DEĞERERİ 50-21 DİKKAT: İyi niyet, ütün dikkt ve çm krşın ynlışlr olilir. Bu nedenle onucu orumluluk verecek ynlışlıklr için, hiçir
2011 Şut KIVIRMA İŞEMİNİN ŞEKİ ve BOYUTARI Hzırlyn: Adnn YIMAZ AÇINIM DEĞERERİ 50-21 DİKKAT: İyi niyet, ütün dikkt ve çm krşın ynlışlr olilir. Bu nedenle onucu orumluluk verecek ynlışlıklr için, hiçir
Sylvac Visio. Kullanıcı dostu. Entegre üç farklı aydinlatma. teknik uzmanlıðı. Atölye ve Laboratuar Uygulamalari Ýçin Görüntülü Ölçüm Sistemlerİ
 1969 dn beri hsss ölçüm cihzlrının İsviçre li üreticisi Sylvc Visio Atölye ve Lbortur Uygulmlri Ýçin Görüntülü Ölçüm Sistemlerİ Optİk mkinlr uygulnn sylvc teknik uzmnlıðı 1969 dn beri hsss ölçüm cihzlrı
1969 dn beri hsss ölçüm cihzlrının İsviçre li üreticisi Sylvc Visio Atölye ve Lbortur Uygulmlri Ýçin Görüntülü Ölçüm Sistemlerİ Optİk mkinlr uygulnn sylvc teknik uzmnlıðı 1969 dn beri hsss ölçüm cihzlrı
DENEY 2 OHM YASASI UYGULAMASI
 T.C. Mltepe Üniversitesi Mühendislik ve Doğ Bilimleri Fkültesi Elektrik-Elektronik Mühendisliği Bölümü ELK 201 DEVRE TEORİSİ DERSİ LABORATUVARI DENEY 2 OHM YASASI UYGULAMASI Hzırlynlr: B. Demir Öner Sime
T.C. Mltepe Üniversitesi Mühendislik ve Doğ Bilimleri Fkültesi Elektrik-Elektronik Mühendisliği Bölümü ELK 201 DEVRE TEORİSİ DERSİ LABORATUVARI DENEY 2 OHM YASASI UYGULAMASI Hzırlynlr: B. Demir Öner Sime
Sürekli Mıknatıslı Doğru Akım Motorunun Hız Denetiminde PI-Bulanık Mantık Tipi Denetim Yönteminin Başarımının İncelenmesi
 Sürekli Mıkntıslı Doğru Akım Motorunun Hız Denetiminde PI-Bulnık Mntık Tipi Denetim Yönteminin Bşrımının İncelenmesi Hsn Rız Özçlık 1, Ahmet Gni 1, Hkn Açıkgöz 2, Ö. Ftih Keçecioğlu 1 1 Khrmnmrş Sütçü
Sürekli Mıkntıslı Doğru Akım Motorunun Hız Denetiminde PI-Bulnık Mntık Tipi Denetim Yönteminin Bşrımının İncelenmesi Hsn Rız Özçlık 1, Ahmet Gni 1, Hkn Açıkgöz 2, Ö. Ftih Keçecioğlu 1 1 Khrmnmrş Sütçü
T.C. MİLLÎ EĞİTİM BAKANLIĞI EĞİTİM TEKNOLOJİLERİ GENEL MÜDÜRLÜĞÜ Ölçme Değerlendirme ve Açıköğretim Kurumları Daire Başkanlığı
 T.C. MİLLÎ EĞİTİM BKNLIĞI EĞİTİM TEKNOLOJİLERİ GENEL MÜDÜRLÜĞÜ Ölçme Değerlendirme ve çıköğretim Kurumlrı Dire Bşknlığı KİTPÇIK TÜRÜ T.C. SĞLIK BKNLIĞI PERSONELİNİN UNVN DEĞİŞİKLİĞİ SINVI 43. GRUP: ELEKTRİK
T.C. MİLLÎ EĞİTİM BKNLIĞI EĞİTİM TEKNOLOJİLERİ GENEL MÜDÜRLÜĞÜ Ölçme Değerlendirme ve çıköğretim Kurumlrı Dire Bşknlığı KİTPÇIK TÜRÜ T.C. SĞLIK BKNLIĞI PERSONELİNİN UNVN DEĞİŞİKLİĞİ SINVI 43. GRUP: ELEKTRİK
EKLEMELİ DC KOMPOUND MOTOR DENEY AMAÇ: Eklemeli kompund bağlanmış DC motorun moment/hız ve verim karakteristiklerini incelemek.
 ĐNÖNÜ ÜNĐVRSĐTSĐ MÜHNDĐSLĐK FAKÜLTSĐ LKTRĐK-LKTRONĐK MÜH. BÖL. KLMLİ DC KOMPOUND MOTOR DNY 324-03. AMAÇ: klemeli kompund bğlnmış DC motorun moment/hız ve verim krkteritiklerini incelemek. 2. UYGULAMALAR:.
ĐNÖNÜ ÜNĐVRSĐTSĐ MÜHNDĐSLĐK FAKÜLTSĐ LKTRĐK-LKTRONĐK MÜH. BÖL. KLMLİ DC KOMPOUND MOTOR DNY 324-03. AMAÇ: klemeli kompund bğlnmış DC motorun moment/hız ve verim krkteritiklerini incelemek. 2. UYGULAMALAR:.
INSA 473 Çelik Tasarım Esasları. Kirişler
 INSA 473 Çelik Tsrım Esslrı Kirişler Eğilmeye Çlışn Elemnlr Ylnızc eğilme momenti etkisinde oln elemnlr, eğilmeye çlışn elemnlr, kiriş dı verilmektedir. Çelik ypılrd kullnıln kirişler; 1) Dolu gövdeli
INSA 473 Çelik Tsrım Esslrı Kirişler Eğilmeye Çlışn Elemnlr Ylnızc eğilme momenti etkisinde oln elemnlr, eğilmeye çlışn elemnlr, kiriş dı verilmektedir. Çelik ypılrd kullnıln kirişler; 1) Dolu gövdeli
çizilen doğru boyunca birim vektörü göstermektedir. q kaynak yükünün konum vektörü r ve Q deneme E( r) = 1 q
 = 1 q") Elektrosttik(Özet) Coulomb Yssı Noktsl bir q yükünün kendisinden r kdr uzktki bir Q yüküne uyguldığı kuvvet, şğıdki Coulomb yssı ile ifde edilir: F = 1 qq ˆr (1) r2 burd boşluğun elektriksel geçirgenlik
Elektrosttik(Özet) Coulomb Yssı Noktsl bir q yükünün kendisinden r kdr uzktki bir Q yüküne uyguldığı kuvvet, şğıdki Coulomb yssı ile ifde edilir: F = 1 qq ˆr (1) r2 burd boşluğun elektriksel geçirgenlik
ALÇAK GERİLİM SİSTEMLERİNDE İZOLASYON HATASINA KARŞI TOPRAKLAMA SİSTEMLERİ
 ALÇAK GEİLİM İTEMLEİNDE İOLAYON HATANA KAŞ TOPAKLAMA İTEMLEİ İzolsyon htlrın bğlı tehlikeler Meyn gelen htnın sebebine bkılmksızın bir izolsyon htsı İnsn hytı Mlzemenin korunmsı Elektrik gücünün kullnımının
ALÇAK GEİLİM İTEMLEİNDE İOLAYON HATANA KAŞ TOPAKLAMA İTEMLEİ İzolsyon htlrın bğlı tehlikeler Meyn gelen htnın sebebine bkılmksızın bir izolsyon htsı İnsn hytı Mlzemenin korunmsı Elektrik gücünün kullnımının
ÇOK KATMANLI HABERLEŞME SİSTEMLERİNDE LİNK YEDEKLEME VE KURTARMA YÖNTEMLERİ
 ÇOK KTMNLI HRLŞM SİSTMLRİN LİNK YKLM V KURTRM YÖNTMLRİ r. Murt Koyunu tılım Üniversitesi, ilgisyr Mühendisliği ölümü, İnek,Gölbşı, nkr mkoyunu@tilim.edu.tr ÖZT ilişim teknolojilerindeki gelişmeler, hem
ÇOK KTMNLI HRLŞM SİSTMLRİN LİNK YKLM V KURTRM YÖNTMLRİ r. Murt Koyunu tılım Üniversitesi, ilgisyr Mühendisliği ölümü, İnek,Gölbşı, nkr mkoyunu@tilim.edu.tr ÖZT ilişim teknolojilerindeki gelişmeler, hem
c
 Mtemt ık Ol ımp ıytı Çlışm Sorulrı c www.sbelin.wordpress.com sbelinwordpress@gmil.com Bu çlışm kğıdınd mtemtik olimpiytlrı sınvlrın hzırlnn öğrenciler ve öğretmenler için hzırlnmış sorulr bulunmktdır.
Mtemt ık Ol ımp ıytı Çlışm Sorulrı c www.sbelin.wordpress.com sbelinwordpress@gmil.com Bu çlışm kğıdınd mtemtik olimpiytlrı sınvlrın hzırlnn öğrenciler ve öğretmenler için hzırlnmış sorulr bulunmktdır.
ASİT-BAZ TEORİSİ. (TİTRASYON) Prof. Dr. Mustafa DEMİR. M.DEMİR(ADU) ASİT-BAZ TEORİSİ (titrasyon) 1
 Prof. Dr. Mustafa DEMİR. M.DEMİR(ADU) ASİT-BAZ TEORİSİ (titrasyon) 1") ASİT-BAZ TEORİSİ (TİTRASYON) Prof. Dr. Mustf DEMİR M.DEMİR(ADU) 009-05-ASİT-BAZ TEORİSİ (titrsyon) 1 Arhenius (su teorisi) 1990 Asit: Sud iyonlştığınd iyonu veren, bz ise O - iyonu veren mddelerdir. Cl,NO,
ASİT-BAZ TEORİSİ (TİTRASYON) Prof. Dr. Mustf DEMİR M.DEMİR(ADU) 009-05-ASİT-BAZ TEORİSİ (titrsyon) 1 Arhenius (su teorisi) 1990 Asit: Sud iyonlştığınd iyonu veren, bz ise O - iyonu veren mddelerdir. Cl,NO,
İÇİNDEKİLER. Ön Söz...2. Matris Cebiri...3. Elementer İşlemler Determinantlar Lineer Denklem Sistemleri Vektör Uzayları...
 İÇİNDEKİLER Ön Söz... Mtris Cebiri... Elementer İşlemler... Determinntlr...7 Lineer Denklem Sistemleri...8 Vektör Uzylrı...6 Lineer Dönüşümler...48 Özdeğerler - Özvektörler ve Köşegenleştirme...55 Genel
İÇİNDEKİLER Ön Söz... Mtris Cebiri... Elementer İşlemler... Determinntlr...7 Lineer Denklem Sistemleri...8 Vektör Uzylrı...6 Lineer Dönüşümler...48 Özdeğerler - Özvektörler ve Köşegenleştirme...55 Genel
TRAFİK SAYIMLARI, BÖLGE NÜFUSLARI VE BÖLGELER ARASI UZAKLIKLARI KULLANARAK BAŞLANGIÇ-SON MATRİSİ TAHMİNİ
 Gzi Üniv. Müh. Mim. Fk. Der. J. Fc. Eng. Arch. Gzi Univ. Cilt 4, No, 9-36, 009 Vol 4, No, 9-36, 009 TRAFİK SAYIMLARI, BÖLGE NÜFUSLARI VE BÖLGELER ARASI UZAKLIKLARI KULLANARAK BAŞLANGIÇ-SON MATRİSİ TAHMİNİ
Gzi Üniv. Müh. Mim. Fk. Der. J. Fc. Eng. Arch. Gzi Univ. Cilt 4, No, 9-36, 009 Vol 4, No, 9-36, 009 TRAFİK SAYIMLARI, BÖLGE NÜFUSLARI VE BÖLGELER ARASI UZAKLIKLARI KULLANARAK BAŞLANGIÇ-SON MATRİSİ TAHMİNİ
Algoritma Geliştirme ve Veri Yapıları 4 Algoritma ve Yazılımın Şekilsel Gösterimi. Mustafa Kemal Üniversitesi
 Algoritm Geliştirme ve Veri Ypılrı 4 Algoritm ve Yzılımın Şekilsel Gösterimi Mustf Keml Üniversitesi Algoritm ve Yzılımın Şekilsel Gösterimi Algoritmik progrm tsrımı, verilen ir prolemin ilgisyr ortmınd
Algoritm Geliştirme ve Veri Ypılrı 4 Algoritm ve Yzılımın Şekilsel Gösterimi Mustf Keml Üniversitesi Algoritm ve Yzılımın Şekilsel Gösterimi Algoritmik progrm tsrımı, verilen ir prolemin ilgisyr ortmınd
TEST 16-1 KONU DÜZLEM AYNA. Çözümlerİ ÇÖZÜMLERİ
 OU 6 Ü Çözümler. TST 6-,7 ÇÖÜR,6 5. Bir cismin görüntüsünün nerede görüneceğini bkn kişinin bulunduğu yer belirlemez. nin görüntüsü nolu noktd olduğu için her iki gözlemci ynı yerde görür. V 3,5 6. 7 kez
OU 6 Ü Çözümler. TST 6-,7 ÇÖÜR,6 5. Bir cismin görüntüsünün nerede görüneceğini bkn kişinin bulunduğu yer belirlemez. nin görüntüsü nolu noktd olduğu için her iki gözlemci ynı yerde görür. V 3,5 6. 7 kez
MALTA HAÇI MEKANİZMASININ KİNEMATİĞİ ÜZERİNE
 MALTA HAÇI MEKANİZMASININ KİNEMATİĞİ ÜZERİNE Yrdımcı Doçent Doktor Yılmz YÜKSEL 1. GİRİŞ Tekstil Mklnlrmd hmmddeyi mmul mdde hline getirirken çoğu kere bir çok teknik iş belirli bir sıry göre rdrd ypılmktdır.
MALTA HAÇI MEKANİZMASININ KİNEMATİĞİ ÜZERİNE Yrdımcı Doçent Doktor Yılmz YÜKSEL 1. GİRİŞ Tekstil Mklnlrmd hmmddeyi mmul mdde hline getirirken çoğu kere bir çok teknik iş belirli bir sıry göre rdrd ypılmktdır.
MUTLAK DEĞER. Sayı doğrusu üzerinde x sayısının sıfıra olan uzaklığına x in mutlak değeri denir ve x ile. gösterilir. x x. = a olarak tanımlanır.
 gösterilir. MUTLAK DEĞER Syı doğrusu üzerinde syısının sıfır oln uzklığın in mutlk değeri denir ve ile B O A 0 OA = OB =, 0 =, < 0 olrk tnımlnır. < 0 < y için y = y işleminin eşitini bulunuz. < 0 için
gösterilir. MUTLAK DEĞER Syı doğrusu üzerinde syısının sıfır oln uzklığın in mutlk değeri denir ve ile B O A 0 OA = OB =, 0 =, < 0 olrk tnımlnır. < 0 < y için y = y işleminin eşitini bulunuz. < 0 için
İ.Ü. Orman Fakültesi Stratejik Plan Çalışmaları İzleme Değerlendirme ve İç Kontrol Yönergesi. Amaç ve Kapsam. Dayanak
 İ.Ü. Ormn Fkültesi Strtejik Pln Çlışmlrı Değerlendirme ve İç Kontrol Yönergesi Amç ve Kpsm Mdde 1: Bu yönergenin birinci mcı İ.Ü. Ormn Fkültesi nin Strtejik Pln kpsmınd yürüttüğü çlışmlrı nesnel bir yklşıml
İ.Ü. Ormn Fkültesi Strtejik Pln Çlışmlrı Değerlendirme ve İç Kontrol Yönergesi Amç ve Kpsm Mdde 1: Bu yönergenin birinci mcı İ.Ü. Ormn Fkültesi nin Strtejik Pln kpsmınd yürüttüğü çlışmlrı nesnel bir yklşıml
BULANIK MANTIK. Gaziosmanpaşa Üniversitesi, Fen Edebiyat Fakültesi, Matematik Bölümü, Tokat.
 Nim Çğmn, ncgmn@gop.edu.tr BLNIK MNTIK Gziosmnpş Üniversitesi, Fen Edebiyt Fkültesi, Mtemtik Bölümü, Tokt. Mtemtik deyince ilk kl gelen kesinliktir. Hlbuki günlük hytt konuşmlrımız rsınd belirsizlik içeren,
Nim Çğmn, ncgmn@gop.edu.tr BLNIK MNTIK Gziosmnpş Üniversitesi, Fen Edebiyt Fkültesi, Mtemtik Bölümü, Tokt. Mtemtik deyince ilk kl gelen kesinliktir. Hlbuki günlük hytt konuşmlrımız rsınd belirsizlik içeren,
DEĞİŞİK UYGULAMALARIN ÇİLEK AKENLERİNİN ÇİMLENMESİ ÜZERİNE ETKİLERİ
 Btı Akdeniz Trımsl Arştırm Enstitüsü Derim Dergisi, 2009,26(2):1-10 ISSN 1300-3496 DEĞİŞİK UYGULAMALARIN ÇİLEK AKENLERİNİN ÇİMLENMESİ ÜZERİNE ETKİLERİ Nfiye ADAK Mustf PEKMEZCİ Hmide GÜBBÜK Akdeniz Üniversitesi
Btı Akdeniz Trımsl Arştırm Enstitüsü Derim Dergisi, 2009,26(2):1-10 ISSN 1300-3496 DEĞİŞİK UYGULAMALARIN ÇİLEK AKENLERİNİN ÇİMLENMESİ ÜZERİNE ETKİLERİ Nfiye ADAK Mustf PEKMEZCİ Hmide GÜBBÜK Akdeniz Üniversitesi
1.6 ELEKTROMOTOR KUVVET VE POTANSİYEL FARK
 .6 ELEKTROMOTOR KUVVET VE POTANSİYEL FARK İki uundn potnsiyel frk uygulnmış metl iletkenlerde, serest elektronlr iletkenin yüksek potnsiyeline doğru çekilirler. Elektrik kımını oluşturn, elektronlrın u
.6 ELEKTROMOTOR KUVVET VE POTANSİYEL FARK İki uundn potnsiyel frk uygulnmış metl iletkenlerde, serest elektronlr iletkenin yüksek potnsiyeline doğru çekilirler. Elektrik kımını oluşturn, elektronlrın u
Özel Görelilik Teorisi. Test 1 in Çözümleri. 3. 0,5c
 41 Özel Görelilik Teorisi ÖZEL GÖRELİLİK TEORİSİ 1 Test 1 in Çözümleri 1. Bir cisim durgun hâldeyken durgun kütle enerjisine shiptir. Durgun kütle enerjisini veren bğıntı E 0 = m.c 2 dir. Cisim ışık hızıyl
41 Özel Görelilik Teorisi ÖZEL GÖRELİLİK TEORİSİ 1 Test 1 in Çözümleri 1. Bir cisim durgun hâldeyken durgun kütle enerjisine shiptir. Durgun kütle enerjisini veren bğıntı E 0 = m.c 2 dir. Cisim ışık hızıyl
Mustafa YAĞCI, yagcimustafa@yahoo.com Parabolün Tepe Noktası
 Mustf YĞCI www.mustfgci.com.tr, 11 Ceir Notlrı Mustf YĞCI, gcimustf@hoo.com Prolün Tepe Noktsı Ö nce ir prolün tepe noktsı neresidir, onu htırltlım. Kc, prolün rtmktn zlm ve zlmktn rtm geçtiği nokt dieiliriz.
Mustf YĞCI www.mustfgci.com.tr, 11 Ceir Notlrı Mustf YĞCI, gcimustf@hoo.com Prolün Tepe Noktsı Ö nce ir prolün tepe noktsı neresidir, onu htırltlım. Kc, prolün rtmktn zlm ve zlmktn rtm geçtiği nokt dieiliriz.
DÜZGÜN DAİRESEL HAREKET ÜÇ AŞAMALI KAVRAM YANILGISI TESTİ (DDHKYT)
") DÜZGÜN DAİRESEL HAREKET ÜÇ AŞAMALI KAVRAM YANILGISI TESTİ (DDHKYT) 2005 Hsn Şhin KIZILCIK hskizilcik@gzi.edu.tr Bill GÜNEŞ bgunes@gzi.edu.tr Gzi Üniersitesi, Gzi Eğitim kültesi, OMAE Bölümü, izik Eğitimi
DÜZGÜN DAİRESEL HAREKET ÜÇ AŞAMALI KAVRAM YANILGISI TESTİ (DDHKYT) 2005 Hsn Şhin KIZILCIK hskizilcik@gzi.edu.tr Bill GÜNEŞ bgunes@gzi.edu.tr Gzi Üniersitesi, Gzi Eğitim kültesi, OMAE Bölümü, izik Eğitimi
2002 ORTA ÖĞRETİM KURUMLARI ÖĞRENCİ SEÇME VE YERLEŞTİRME SINAVI MATEMATİK TESTİ 10. 10 10. aşağıdakilerden hangisidir? A) 0,01 B) 0,1 C) 10 D) 100
 0,01 B) 0,1 C) 10 D) 100") 22 ORTA ÖĞRETİ URUARI ÖĞRECİ EÇE VE YEREŞTİRE IAVI ATEATİ TETİ 1. 3 2 1 1. 1 1. 1 : işleminin sonucu 7 1. 1 1 şğıdkilerden hngisidir? A),1 B),1 C) 1 D) 1 2. O P R T U V Yukrıdki syı doğrusund birbirine
22 ORTA ÖĞRETİ URUARI ÖĞRECİ EÇE VE YEREŞTİRE IAVI ATEATİ TETİ 1. 3 2 1 1. 1 1. 1 : işleminin sonucu 7 1. 1 1 şğıdkilerden hngisidir? A),1 B),1 C) 1 D) 1 2. O P R T U V Yukrıdki syı doğrusund birbirine
DA MOTOR SÜRÜCÜLERİ İÇİN BULANIK MANTIK DENETİMİ
 DA MOTOR SÜRÜCÜLERİ İÇİN BULANIK MANTIK DENETİMİ Yuuf SÖNMEZ* (*) Gzi Üniveritei, Elektrik Eğitimi Bölümü, 06500, Ankr yonmez@gzi.edu.tr ÖZET Günümüzde DA (doğru kım) motorlr endütriyel lnd geniş bir kullnım
DA MOTOR SÜRÜCÜLERİ İÇİN BULANIK MANTIK DENETİMİ Yuuf SÖNMEZ* (*) Gzi Üniveritei, Elektrik Eğitimi Bölümü, 06500, Ankr yonmez@gzi.edu.tr ÖZET Günümüzde DA (doğru kım) motorlr endütriyel lnd geniş bir kullnım
ÖRNEK 8.8: Aşağıdaki şekilde bir su deposunun altında bağlanmış olan boru hattı temsil edilmiştir. Sistem 180F'de
 ÖRNEK 8.8: Aşğıdki şekilde ir su deposunun ltınd ğlnmış oln oru httı temsil edilmiştir. Sistem 80F'de su içermektedir. Boru httındn 00 l/dk kım sğlmk için tnktki su seviyesi ne olmlıdır? Suyun yoğunluğu
ÖRNEK 8.8: Aşğıdki şekilde ir su deposunun ltınd ğlnmış oln oru httı temsil edilmiştir. Sistem 80F'de su içermektedir. Boru httındn 00 l/dk kım sğlmk için tnktki su seviyesi ne olmlıdır? Suyun yoğunluğu
*Corresponding Author Tel.:+90-332-223 19 42; fax:+90-332-241 06 35 E-mail:fyildiz@selcuk.edu.tr
 Selçuk Üniversitesi ISSN 130/6178 Journl of Technicl-Online Volume 10, Number:1-011 Cilt 10, Syı:1-011 ÇAPRAZ İLİŞKİ METODUYLA İRİS TANIMA Ferruh YILDIZ,*, Nurdn Akhn BAYKAN b Selçuk Üniversitesi, Hrit
Selçuk Üniversitesi ISSN 130/6178 Journl of Technicl-Online Volume 10, Number:1-011 Cilt 10, Syı:1-011 ÇAPRAZ İLİŞKİ METODUYLA İRİS TANIMA Ferruh YILDIZ,*, Nurdn Akhn BAYKAN b Selçuk Üniversitesi, Hrit
EasyMP Multi PC Projection Kullanım Kılavuzu
 EsyMP Multi PC Projection Kullnım Kılvuzu İçindekiler 2 EsyMP Multi PC Projection Hkkınd EsyMP Multi PC Projection Trfındn Önerilen Toplntı Stilleri... 5 Birden Çok Görüntü Kullnrk Toplntı Ypm... 5 Ağ
EsyMP Multi PC Projection Kullnım Kılvuzu İçindekiler 2 EsyMP Multi PC Projection Hkkınd EsyMP Multi PC Projection Trfındn Önerilen Toplntı Stilleri... 5 Birden Çok Görüntü Kullnrk Toplntı Ypm... 5 Ağ
2013 YILI TÜRKİYE RADYO VE TELEVİZYON YAYINCILIĞI SEKTÖR RAPORU
 2 0 1 3YI L I R KL AMV Rİ L Rİ YL T ÜRKİ Y RADY OVT L Vİ ZY ONY A YI NCI L I ĞI S KT ÖRRAPORU R A T M R A D Y OT L V İ Z Y O NY A Y I N C I L A R I M S L KB İ R L İ Ğ İ L e y l ks o k kmu r t İ ş Me r
2 0 1 3YI L I R KL AMV Rİ L Rİ YL T ÜRKİ Y RADY OVT L Vİ ZY ONY A YI NCI L I ĞI S KT ÖRRAPORU R A T M R A D Y OT L V İ Z Y O NY A Y I N C I L A R I M S L KB İ R L İ Ğ İ L e y l ks o k kmu r t İ ş Me r
BASİT HARMONİK HAREKETTE DEĞİŞEN SAYISAL VERİLERİN İNCELENMESİ
 BASİT HARMONİK HAREKETTE DEĞİŞEN SAYISAL VERİLERİN İNCELENMESİ Seher Küçüközkn 1, Sibel Bulut 2, Gülsemin Şhin 3 1 Aşçı Bekirliköyü İÖO, Pozntı, Adn 2 Cumhuriyet YİBO, Kht, Adıymn 3 Akmeşe YİBO, Koceli
BASİT HARMONİK HAREKETTE DEĞİŞEN SAYISAL VERİLERİN İNCELENMESİ Seher Küçüközkn 1, Sibel Bulut 2, Gülsemin Şhin 3 1 Aşçı Bekirliköyü İÖO, Pozntı, Adn 2 Cumhuriyet YİBO, Kht, Adıymn 3 Akmeşe YİBO, Koceli
SAYI ÖRÜNTÜLERİ VE CEBİRSEL İFADELER
 ÖRÜNTÜLER VE İLİŞKİLER Belirli bir kurl göre düzenli bir şekilde tekrr eden şekil vey syı dizisine örüntü denir. ÖRNEK: Aşğıdki syı dizilerinin kurlını bulunuz. 9, 16, 23, 30, 37 5, 10, 15, 20 bir syı
ÖRÜNTÜLER VE İLİŞKİLER Belirli bir kurl göre düzenli bir şekilde tekrr eden şekil vey syı dizisine örüntü denir. ÖRNEK: Aşğıdki syı dizilerinin kurlını bulunuz. 9, 16, 23, 30, 37 5, 10, 15, 20 bir syı
LOGARİTMA. Örnek: çizelim. Çözüm: f (x) a biçiminde tanımlanan fonksiyona üstel. aşağıda verilmiştir.
 a biçiminde tanımlanan fonksiyona üstel. aşağıda verilmiştir.") LOGARİTMA I. Üstl Fonksiyonlr v Logritmik Fonksiyonlr şitliğini sğlyn dğrini bulmk için ypıln işlm üs lm işlmi dnir. ( =... = 8) y şitliğini sğlyn y dğrini bulmk için ypıln işlm üslü dnklmi çözm dnir.
LOGARİTMA I. Üstl Fonksiyonlr v Logritmik Fonksiyonlr şitliğini sğlyn dğrini bulmk için ypıln işlm üs lm işlmi dnir. ( =... = 8) y şitliğini sğlyn y dğrini bulmk için ypıln işlm üslü dnklmi çözm dnir.
Bildirişimli Matematiğin <T, 1, n> Q Sürü Bellekli 3D I@I Internet Sürüsü
 Bildirişimli Mtemtiğin Q Sürü Bellekli 3D II Internet Sürüsü Prof. Dr. Fevzi Ünlü Mtemtik ve Bilisyr Bilimleri Profesörü Ee Üniversitesi ve Yşr Üniversitesi Emekli Öğretim Üyesi İzmir Özet Q ve
Bildirişimli Mtemtiğin Q Sürü Bellekli 3D II Internet Sürüsü Prof. Dr. Fevzi Ünlü Mtemtik ve Bilisyr Bilimleri Profesörü Ee Üniversitesi ve Yşr Üniversitesi Emekli Öğretim Üyesi İzmir Özet Q ve
Üslü Sayılar MATEMATİK. 5.Hafta. Hedefler. Öğr.Gör. Esrin PALAS BOZKURT Öğr.Gör. Muhsin ÇELİK. Bu üniteyi çalıştıktan sonra;
 MATEMATİK Üslü Syılr Öğr.Gör. Esrin PALAS BOZKURT Öğr.Gör. Muhsin ÇELİK 5.Hft Hedefler Bu üniteyi çlıştıktn sonr; Gerçel syılrd üslü işlemler ypbilecek, Üslü denklem ve üslü eşitsizlikleri çözebileceksiniz.
MATEMATİK Üslü Syılr Öğr.Gör. Esrin PALAS BOZKURT Öğr.Gör. Muhsin ÇELİK 5.Hft Hedefler Bu üniteyi çlıştıktn sonr; Gerçel syılrd üslü işlemler ypbilecek, Üslü denklem ve üslü eşitsizlikleri çözebileceksiniz.
DENKLEM ve EŞİTSİZLİKLER ÜNİTE 2. ÜNİTE 2. ÜNİTE 2. ÜNİTE 2. ÜNİT
 DENKLEM ve EŞİTSİZLİKLER ÜNİTE. ÜNİTE. ÜNİTE. ÜNİTE. ÜNİT BİRİNCİ DERECEDEN DENKLEM ve EŞİTSİZLİKLER. Kznım : Gerçek syılr kümesinde birinci dereceden eşitsizliğin özelliklerini belirtir.. Kznım : Gerçek
DENKLEM ve EŞİTSİZLİKLER ÜNİTE. ÜNİTE. ÜNİTE. ÜNİTE. ÜNİT BİRİNCİ DERECEDEN DENKLEM ve EŞİTSİZLİKLER. Kznım : Gerçek syılr kümesinde birinci dereceden eşitsizliğin özelliklerini belirtir.. Kznım : Gerçek
Harita Dik Koordinat Sistemi
 Hrit Dik Koordint Sistemi Noktlrın ir düzlem içinde irirlerine göre konumlrını elirlemek için, iririni dik çı ltınd kesen iki doğru kullnılır. Bun dik koordint sistemi denir. + X (sis) Açı üyütme Yönü
Hrit Dik Koordint Sistemi Noktlrın ir düzlem içinde irirlerine göre konumlrını elirlemek için, iririni dik çı ltınd kesen iki doğru kullnılır. Bun dik koordint sistemi denir. + X (sis) Açı üyütme Yönü
LYS LİMİT VE SÜREKLİLİK KONU ÖZETLİ ÇÖZÜMLÜ SORU BANKASI
 LYS LİMİT VE SÜREKLİLİK KONU ÖETLİ ÇÖÜMLÜ SORU BANKASI ANKARA İÇİNDEKİLER Limit Kvrmı ve Grfik Sorulrı... Limitle İlgili Bzı Özellikler...7 Genişletilmiş Reel Sılrd Limit... Bileşke Fonksionun Limiti...
LYS LİMİT VE SÜREKLİLİK KONU ÖETLİ ÇÖÜMLÜ SORU BANKASI ANKARA İÇİNDEKİLER Limit Kvrmı ve Grfik Sorulrı... Limitle İlgili Bzı Özellikler...7 Genişletilmiş Reel Sılrd Limit... Bileşke Fonksionun Limiti...
T.C.. VALİLİĞİ.. OKULU/LİSESİ
 T.C.. VALİLİĞİ.. OKULU/LİSESİ../. EĞİTİM ÖĞRETİM YILI ÖĞRENCİNİN Adı Soydı Sınıfı No Eğitimde fed edilecek fert yoktur. Mustf Keml ATATÜRK T.C... VALİLİĞİ/KAYMAKAMLIĞI Milli Eğitim Müdürlüğü. OKULU/LİSESİ
T.C.. VALİLİĞİ.. OKULU/LİSESİ../. EĞİTİM ÖĞRETİM YILI ÖĞRENCİNİN Adı Soydı Sınıfı No Eğitimde fed edilecek fert yoktur. Mustf Keml ATATÜRK T.C... VALİLİĞİ/KAYMAKAMLIĞI Milli Eğitim Müdürlüğü. OKULU/LİSESİ
SÜREKLİ REJİM ENERJİ DENGESİ MODELİNE GÖRE ISIL KONFOR BÖLGELERİ
 PAMUKKALE ÜNİ VERSİ TESİ MÜHENDİ SLİ K FAKÜLTESİ PAMUKKALE UNIVERSITY ENGINEERING COLLEGE MÜHENDİ SLİ K BİLİMLERİ DERGİ S İ JOURNAL OF ENGINEERING SCIENCES YIL CİLT SAYI SAYFA : 2003 : 9 : 1 : 23-30 SÜREKLİ
PAMUKKALE ÜNİ VERSİ TESİ MÜHENDİ SLİ K FAKÜLTESİ PAMUKKALE UNIVERSITY ENGINEERING COLLEGE MÜHENDİ SLİ K BİLİMLERİ DERGİ S İ JOURNAL OF ENGINEERING SCIENCES YIL CİLT SAYI SAYFA : 2003 : 9 : 1 : 23-30 SÜREKLİ
II. DERECEDEN DENKLEMLER
 ünite DEEEDE DEKEME Dereceden Denklemler TEST 0 x x + = 0 denkleminin kökleri x ve x dir 6 x + x + x işleminin sonucu kçtır? ) B) ) D) E) x + bx + = 0 x - denkleminin reel syılrdki çözüm kümesi bir elemnlı
ünite DEEEDE DEKEME Dereceden Denklemler TEST 0 x x + = 0 denkleminin kökleri x ve x dir 6 x + x + x işleminin sonucu kçtır? ) B) ) D) E) x + bx + = 0 x - denkleminin reel syılrdki çözüm kümesi bir elemnlı