Robot Teklonolojilerine Giriş. Keşif Algoritmaları. Mehmet Fatih Amasyalı YILDIZ TEKNİK ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
|
|
|
- Irmak Gürses
- 5 yıl önce
- İzleme sayısı:
Transkript
1 Robot Teklonolojilerine Giriş Keşif Algoritmaları Mehmet Fatih Amasyalı
2 Robot Gezinimi Bilinen bir ortamda hareket Lokalizasyon (neredeyim) Navigasyon (şuraya nasıl giderim) Bilinmeyen bir ortamda hareket Keşif (nereye gideyim) Haritalama (nasıl bir ortamdayım) Navigasyon (şuraya nasıl giderim)
3 Neden Keşif Arama kurtarma Hız Güvenlik Daha keşfedecek çok yer var Uzay, okyanuslar
4 Basit keşif algoritmaları Duvar takibi En uzağa git Haritalama gerektirmezler Ama ortamın tamamını gezemezler
 Grid/hücre")


 olarak belirlenmektedir.")
5 Her yeri gezmek için Gezilen ve gezilmeyen yerleri bilmek gerekir (Harita) Grid/hücre tabanlı yaklaşım: (a) (b) (c) (d) Örnek hücreler. Beyaz hücreler keşfedilmemiş, gri hücreler keşfedilmiş ve boş, siyah hücreler ise keşfedilmiş ve doludur. Ortadaki hücre sadece (a) durumda Frontier (öncül) olarak belirlenmektedir. Öncül: kendisi keşfedilmiş ve boş ve en az bir keşfedilmemiş komşusu olan hücre
6 Haritada birçok öncül hücre olabilir. Hangisine gitmeliyim? (xi,xj) koordinatındaki bir hücrenin iyiliği nasıl ölçülür: (ri,rj) koordinatındaki robota en yakın en iyi: U(xi,xj) = C((ri,rj),(xi,xj)) C? öklid? A*? min U değerine sahip hücre hedef
1000 denemenin tüm sonuçları b)b) ortalama değerler Boş bir harita için ilişki nasıl")
7 A* maliyet Kaynak-hedef arası Öklid mesafesi ile path hesaplama süresi arasındaki ilişki a)1000 denemenin tüm sonuçları b)b) ortalama değerler Boş bir harita için ilişki nasıl olur?
8 Öncülleri kümelemek A* pahalı ama lazım, Çok fazla hesaplamamak lazım Her öncül hücre için hesaplamak yerine Hücreleri bağımlı bileşenler ile kümeleyelim. Her küme için hesaplayalım.
9
10
11 Öncülleri kümelemek (xi,xj) koordinatındaki bir hücre kümesinin iyiliği nasıl ölçülür: U(xi,xj) = P(xi,xj) + C((ri,rj),(xi,xj)) P? Kümenin büyüklüğü? Küçüklüğü? Kümenin koordinatı? İçerdiği öncüllerin ortası (öncül olmayabilir) İçerdiği öncüllerden robota en yakını (pahalı) Kümenin ortasına en yakın öncül (az pahalı)
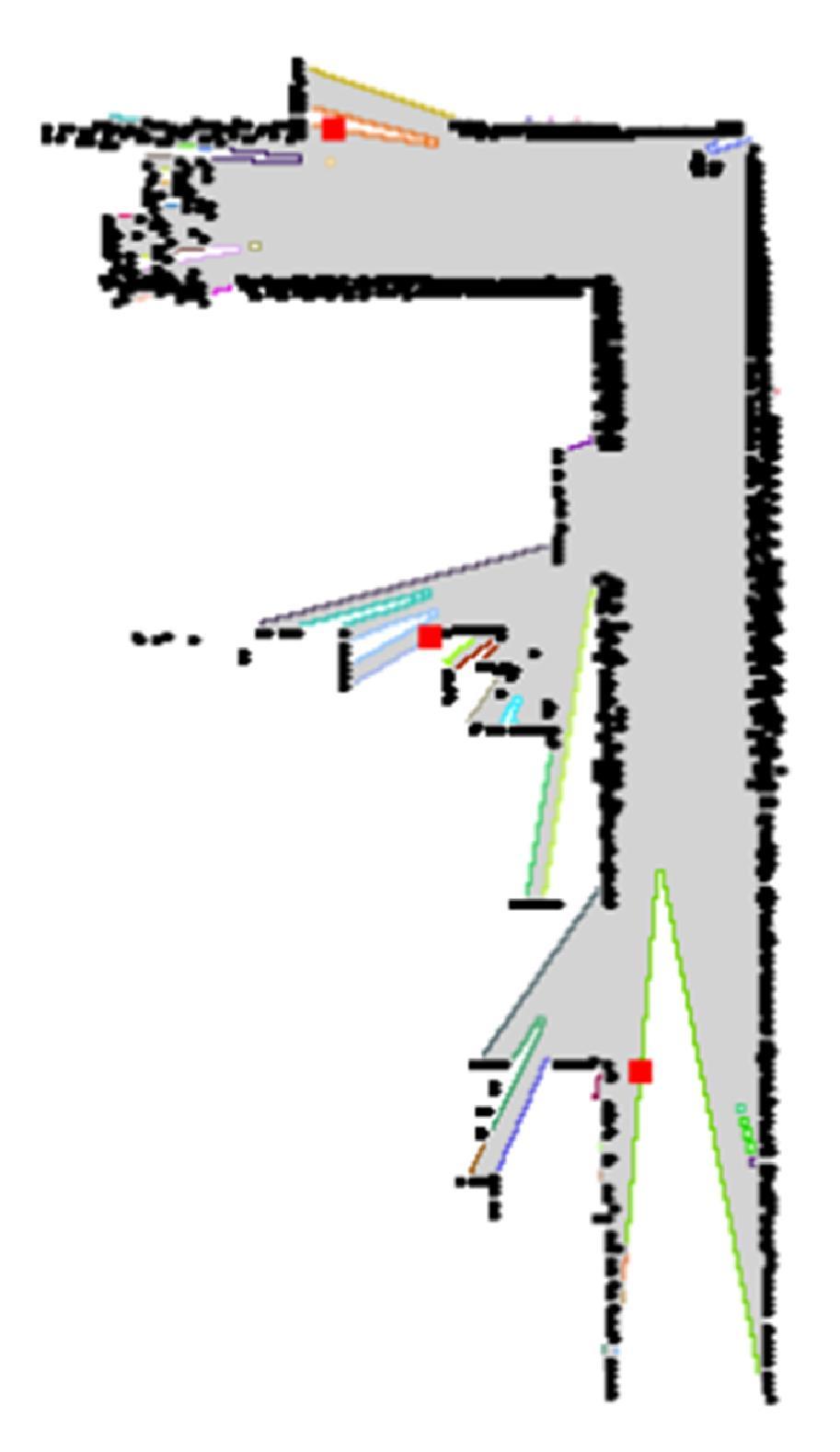
12 Beyond frontiers Hedef seçmek için bir başka yol Lazer range in belirli bir aralığının içinde kalan ve boş olan hücreler beyond frontier hücreler olarak belirlenir. Bu hücrelere CCL uygulanarak kümelenirler. Her kümenin merkezine en yakın hücreler hedeftir.

13 Beyond frontiers
14 Tek robotla keşif algoritması Hedefleri belirle Hedeflerin iyiliğini hesapla Hedefi seç Robot-hedef için yol bul Robotu hedefine doğru ilerlet Robot hedefine varınca başa dön
15 Çok robotla keşif algoritması Hedefleri belirle Hedeflerin her bir robot için iyiliklerini hesapla Robot-hedef eşlemesi yap Eşlenmiş robot-hedef ikilileri için yolları bul Robotları hedeflerine doğru ilerlet Robotlardan biri hedefine varınca başa dön
16 Robot hedef eşlemesi R robot, H hedef olsun U: R*H boyutlu bir matris Her bir hücre için A* hesapla (çok pahalı) R kez U matrisinin en küçük elemanını bul U(i,j) i. robota j. hedefi ata i. satırı ve j. sütunu U matrisinden sil R*H kez A* çağrılıyor
17 Hızlandıralım U: R*H boyutlu bir matris Her bir hücre için Öklid hesapla (çok ucuz) R kez U matrisinin en küçük elemanını bul U(i,j) i. satırdaki tüm elemanlar için A* hesapla. En küçüğünü (j) bul. i. robota j. hedefi ata i. satırı ve j. sütunu U matrisinden sil Faydası? her bir adımda hesaplanan A* path sayısı birer birer azalmakta
18 Daha da hızlandır Salih Marangoz U: R*H boyutlu bir matris Her bir hücre için Öklid hesapla (çok ucuz) R kez 1- U matrisinin en küçük elemanını bul U(i,j) 2- U(i,j) için A* hesapla. Bu değerden büyük tüm U elemanlarını sil İşlenmemiş eleman kalmayıncaya kadar 1 ve 2 yi tekrar et U nun en küçüğünü bul U(k,t). k. robota t. hedefi ata k. satırı ve t. sütunu U matrisinden sil
19 Step U matrix Daha da hızlandır Salih Marangoz 1.step T1 T2 T3 T4 T5 T6 R R step T1 T2 T3 T4 T5 T6 R1 7 7 inf inf inf inf R2 inf inf 4 inf inf inf 3.step T1 T2 T3 T4 T5 T6 R1 inf inf inf inf inf inf R2 inf inf 6 inf inf inf 4.step T1 T2 T4 T5 T6 R step T1 T2 T4 T5 T6 R1 7 7 inf inf inf 6.step T1 T2 T4 T5 T6 R1 8 7 inf inf inf Process [r,h]=min(u), r=1, h=2 Calculate Path_size(Rs(1,:),Ts(2,:)) Assume path_size=7 [r,h]=min(u), r=2, h=3 Calculate Path_size(Rs(2,:),Ts(3,:)) Assume path_size=6 All cells of U is processed Assign T3 to R2 Exclude assigned robot and target from U [r,h]=min(u), r=1, h=2 Path_size(Rs(1,:),Ts(2,:)) is aldready calculated. path_size=7 [r,h]=min(u), r=1, h=1 Calculate Path_size(Rs(1,:),Ts(1,:)) Assume path_size=8 All cells of U is processed
20 Daha da hızlandır Salih Marangoz

21 Sonuçları görelim Matlab uygulaması (multi_kesif_v7.m) Önce VI Sonra SA Gazebo uygulaması


22 Kısıtlı iletişim durumu Teşekkürler Attila Akıncı Robotun kapsama alanını terk edişi Robotun kapsama alanına topladığı bilgilerle dönüşü

23 3 boyutlu keşif 3 boyutlu hareket, drone 3 boyutlu hedef belirleme 3 boyutlu A* Teşekkürler Salih Marangoz ve Ezgi Ekin Ergün
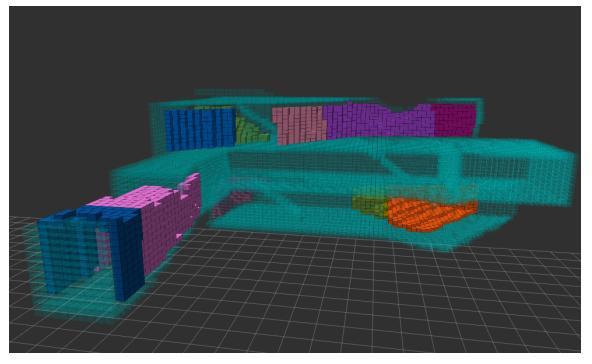
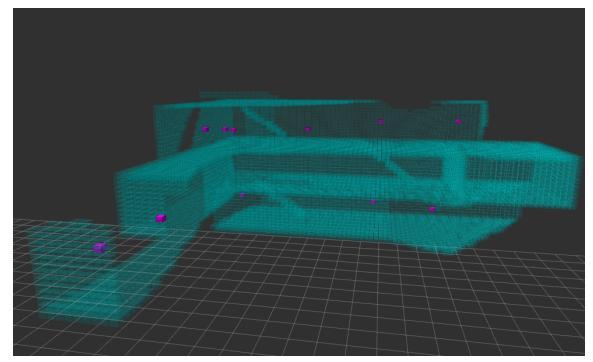
24
25 3 boyutlu keşif Siu 2017 de izleyin E12G-g
26 Kaynaklar Visser, Arnoud, and Bayu A. Slamet. "Including communication success in the estimation of information gain for multi-robot exploration.",wiopt WCPKJ1KQprSb3g
VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Sınıflandırma yöntemleri Karar ağaçları ile sınıflandırma Entropi Kavramı ID3 Algoritması C4.5
VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Sınıflandırma yöntemleri Karar ağaçları ile sınıflandırma Entropi Kavramı ID3 Algoritması C4.5
ISK116 - Bölüm 1. Grup Teknolojisi
 ISK - Bölüm Grup Teknolojisi Grup Teknolojisi (GT) Grup teknolojisi benzerliklerden faydalanarak büyük ve karmaşık bir üretim sisteminin, küçük ve kolay kontrol edilebilir sistemlere dönüştürülmesi hedeflenmektedir.
ISK - Bölüm Grup Teknolojisi Grup Teknolojisi (GT) Grup teknolojisi benzerliklerden faydalanarak büyük ve karmaşık bir üretim sisteminin, küçük ve kolay kontrol edilebilir sistemlere dönüştürülmesi hedeflenmektedir.
ÖRNEKLER-VEKTÖR UZAYLARI 1. Çözüm: w=k 1 u+k 2 v olmalıdır.
 ÖRNEKLER-VEKTÖR UZAYLARI. vektör uzayında yer alan w=(9 7) vektörünün, u=( -), v=(6 ) vektörlerinin doğrusal bir kombinasyonu olduğunu ve z=( - 8) vektörünün ise bu vektörlerin doğrusal bir kombinasyonu
ÖRNEKLER-VEKTÖR UZAYLARI. vektör uzayında yer alan w=(9 7) vektörünün, u=( -), v=(6 ) vektörlerinin doğrusal bir kombinasyonu olduğunu ve z=( - 8) vektörünün ise bu vektörlerin doğrusal bir kombinasyonu
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ
 GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
Arama Kurtarma Amaçlı Robot Platformu Tasarımı ve Gerçeklenmesi. Arş. Gör. Furkan Çakmak
 Arama Kurtarma Amaçlı Robot Platformu Tasarımı ve Gerçeklenmesi Arş. Gör. Furkan Çakmak Biz kimiz? Akış Nedir? Nedir? Arama Kurtarma Robotları Özellikleri Robot Platformu Gezinim Manuel Otonom Haritalama
Arama Kurtarma Amaçlı Robot Platformu Tasarımı ve Gerçeklenmesi Arş. Gör. Furkan Çakmak Biz kimiz? Akış Nedir? Nedir? Arama Kurtarma Robotları Özellikleri Robot Platformu Gezinim Manuel Otonom Haritalama
Robot İzleme (Robot Tracing)
") SORU : 1 DEĞERİ : 100 PUAN HAZIRLAYAN : Öğr.Gör. Ömer ÇAKIR Robot İzleme (Robot Tracing) Önüne çıkan engelleri aşağıda anlatılan algoritmaya göre aşıp çıkış noktasına ulaşan bir robotun başlangıç noktasından
SORU : 1 DEĞERİ : 100 PUAN HAZIRLAYAN : Öğr.Gör. Ömer ÇAKIR Robot İzleme (Robot Tracing) Önüne çıkan engelleri aşağıda anlatılan algoritmaya göre aşıp çıkış noktasına ulaşan bir robotun başlangıç noktasından
BİLGİSAYAR PROGRAMLAMA DERSİ
 BİLGİSAYAR PROGRAMLAMA DERSİ Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü DERS NOTU 5 KONU: Matlab de Diziler ve Matrisler İÇ İÇE FOR DÖNGÜSÜ
BİLGİSAYAR PROGRAMLAMA DERSİ Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü DERS NOTU 5 KONU: Matlab de Diziler ve Matrisler İÇ İÇE FOR DÖNGÜSÜ
Lineer Denklem Sistemleri Kısa Bilgiler ve Alıştırmalar
 Lineer Denklem Sistemleri Kısa Bilgiler ve Alıştırmalar Bir Matrisin Rankı A m n matrisinin determinantı sıfırdan farklı olan alt kare matrislerinin boyutlarının en büyüğüne A matrisinin rankı denir. rank(a)
Lineer Denklem Sistemleri Kısa Bilgiler ve Alıştırmalar Bir Matrisin Rankı A m n matrisinin determinantı sıfırdan farklı olan alt kare matrislerinin boyutlarının en büyüğüne A matrisinin rankı denir. rank(a)
VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Kümeleme İşlemleri Kümeleme Tanımı Kümeleme Uygulamaları Kümeleme Yöntemleri Kümeleme (Clustering) Kümeleme birbirine
VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Kümeleme İşlemleri Kümeleme Tanımı Kümeleme Uygulamaları Kümeleme Yöntemleri Kümeleme (Clustering) Kümeleme birbirine
8.Konu Vektör uzayları, Alt Uzaylar
 8.Konu Vektör uzayları, Alt Uzaylar 8.1. Düzlemde vektörler Düzlemdeki her noktası ile reel sayılardan oluşan ikilisini eşleştirebiliriz. Buna P noktanın koordinatları denir. y-ekseni P x y O dan P ye
8.Konu Vektör uzayları, Alt Uzaylar 8.1. Düzlemde vektörler Düzlemdeki her noktası ile reel sayılardan oluşan ikilisini eşleştirebiliriz. Buna P noktanın koordinatları denir. y-ekseni P x y O dan P ye
KARAR TEORİSİ. Özlem AYDIN. Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü
 KARAR TEORİSİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü Karar Ortamları Karar Analizi, alternatiflerin en iyisini seçmek için akılcı bir sürecin kullanılması ile ilgilenir. Seçilen
KARAR TEORİSİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü Karar Ortamları Karar Analizi, alternatiflerin en iyisini seçmek için akılcı bir sürecin kullanılması ile ilgilenir. Seçilen
Çok-öbekli Veri için Aradeğerlemeci Ayrışım
 Interpolative Decomposition for Data with Multiple Clusters Çok-öbekli Veri için Aradeğerlemeci Ayrışım İsmail Arı, A. Taylan Cemgil, Lale Akarun. Boğaziçi Üniversitesi, Bilgisayar Mühendisliği 25 Nisan
Interpolative Decomposition for Data with Multiple Clusters Çok-öbekli Veri için Aradeğerlemeci Ayrışım İsmail Arı, A. Taylan Cemgil, Lale Akarun. Boğaziçi Üniversitesi, Bilgisayar Mühendisliği 25 Nisan
STEM komutu ayrık zamanlı sinyalleri veya fonksiyonları çizmek amacı ile kullanılır. Bu komutun en basit kullanım şekli şöyledir: stem(x,y).
.") STEM Komutu: STEM komutu ayrık zamanlı sinyalleri veya fonksiyonları çizmek amacı ile kullanılır. Bu komutun en basit kullanım şekli şöyledir: stem(x,y). Bu komutta X vektörünün ve Y vektörünün elemanları
STEM Komutu: STEM komutu ayrık zamanlı sinyalleri veya fonksiyonları çizmek amacı ile kullanılır. Bu komutun en basit kullanım şekli şöyledir: stem(x,y). Bu komutta X vektörünün ve Y vektörünün elemanları
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 9 Stereo Görüntüleme Alp Ertürk alp.erturk@kocaeli.edu.tr Tek Kamera Geometrisi??? x Tek Kamera Geometrisi Tek Kamera Geometrisi İğne Deliği Kamera Modeli ) /, / ( ),, (
Bilgisayarla Görüye Giriş Ders 9 Stereo Görüntüleme Alp Ertürk alp.erturk@kocaeli.edu.tr Tek Kamera Geometrisi??? x Tek Kamera Geometrisi Tek Kamera Geometrisi İğne Deliği Kamera Modeli ) /, / ( ),, (
Skalar,vektör ve matris değişkenlerle işlemler:
 Skalar,vektör ve matris değişkenlerle işlemler: Matlab'te genel olarak kullanacağınız veri tipleri vektörler ve matrisler olacaktır.örneğin belirli bir büyüklüğün değişik zaman aralıkları için çizimini
Skalar,vektör ve matris değişkenlerle işlemler: Matlab'te genel olarak kullanacağınız veri tipleri vektörler ve matrisler olacaktır.örneğin belirli bir büyüklüğün değişik zaman aralıkları için çizimini
Nazım K. Ekinci Matematiksel İktisat Notları ax 1 + bx 2 = α cx 1 + dx 2 =
 Naım K. Ekinci Matematiksel İktisat Notları 0.6. DOĞRUSL DENKLEM SİSTEMLERİ ax + bx = α cx + dx = gibi bir doğrusal denklem sistemini, x ve y bilinmeyenler olmak üere, çömeyi hepimi biliyoru. ma probleme
Naım K. Ekinci Matematiksel İktisat Notları 0.6. DOĞRUSL DENKLEM SİSTEMLERİ ax + bx = α cx + dx = gibi bir doğrusal denklem sistemini, x ve y bilinmeyenler olmak üere, çömeyi hepimi biliyoru. ma probleme
Kamera Görüntülerinden Gidilen Yolun Kestirimi ÖZET
 Kamera Görüntülerinden Gidilen Yolun Kestirimi Aykut Münük 1, Münir Sali 1 ve M.Fatih Amasyalı 1 1 Yıldız Teknik Üniversitesi Bilgisayar Mühendisliği Bölümü, İstanbul, Türkiye ÖZET Çalışmada hareket eden
Kamera Görüntülerinden Gidilen Yolun Kestirimi Aykut Münük 1, Münir Sali 1 ve M.Fatih Amasyalı 1 1 Yıldız Teknik Üniversitesi Bilgisayar Mühendisliği Bölümü, İstanbul, Türkiye ÖZET Çalışmada hareket eden
Web Madenciliği (Web Mining)
") Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimsiz Öğrenmenin Temelleri Kümeleme Uzaklık Fonksiyonları Öklid Uzaklığı Manhattan
Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimsiz Öğrenmenin Temelleri Kümeleme Uzaklık Fonksiyonları Öklid Uzaklığı Manhattan
Genel Graf Üzerinde Mutlak 1-merkez
 Genel Graf Üzerinde Mutlak 1-merkez Çözüm yöntemine geçmeden önce bazı tanımlara ihtiyaç vardır. Dikkate alınan G grafındaki düğümleri 1 den n e kadar numaralandırın. Uzunluğu a(i, j)>0 olarak verilen
Genel Graf Üzerinde Mutlak 1-merkez Çözüm yöntemine geçmeden önce bazı tanımlara ihtiyaç vardır. Dikkate alınan G grafındaki düğümleri 1 den n e kadar numaralandırın. Uzunluğu a(i, j)>0 olarak verilen
Makine Öğrenmesi 2. hafta
 Makine Öğrenmesi 2. hafta Uzaklığa dayalı gruplandırma K-means kümeleme K-NN sınıflayıcı 1 Uzaklığa dayalı gruplandırma Makine öğrenmesinde amaç birbirine en çok benzeyen veri noktalarını aynı grup içerisinde
Makine Öğrenmesi 2. hafta Uzaklığa dayalı gruplandırma K-means kümeleme K-NN sınıflayıcı 1 Uzaklığa dayalı gruplandırma Makine öğrenmesinde amaç birbirine en çok benzeyen veri noktalarını aynı grup içerisinde
Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss
 Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss Jordan Yöntemi ve Uygulaması Performans Ölçümü 2 Bu çalışmada,
Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss Jordan Yöntemi ve Uygulaması Performans Ölçümü 2 Bu çalışmada,
1 Vektör Uzayları 2. Lineer Cebir. David Pierce. Matematik Bölümü, MSGSÜ mat.msgsu.edu.tr/~dpierce/
 Vektör Uzayları Lineer Cebir David Pierce 5 Mayıs 2017 Matematik Bölümü, MSGSÜ dpierce@msgsu.edu.tr mat.msgsu.edu.tr/~dpierce/ Bu notlarda, alıştırma olarak her teorem, sonuç, ve örnek kanıtlanabilir;
Vektör Uzayları Lineer Cebir David Pierce 5 Mayıs 2017 Matematik Bölümü, MSGSÜ dpierce@msgsu.edu.tr mat.msgsu.edu.tr/~dpierce/ Bu notlarda, alıştırma olarak her teorem, sonuç, ve örnek kanıtlanabilir;
23. Sistem denge denklemlerinin direkt kurulması
 . Sistem denge denklemlerinin direkt kurulması. Sistem denge denklemlerinin direkt kurulması Sonlu elemanlar metodu el hesapları için değil, bilgisayarda yazılımlar ile kullanılması için geliştirilmiştir.
. Sistem denge denklemlerinin direkt kurulması. Sistem denge denklemlerinin direkt kurulması Sonlu elemanlar metodu el hesapları için değil, bilgisayarda yazılımlar ile kullanılması için geliştirilmiştir.
7. BÖLÜM İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI İÇ ÇARPIM UZAYLARI .= 1 1 + + Genel: Vektörler bölümünde vektörel iç çarpım;
 İÇ ÇARPIM UZAYLARI 7. BÖLÜM İÇ ÇARPIM UZAYLARI Genel: Vektörler bölümünde vektörel iç çarpım;.= 1 1 + + Açıklanmış ve bu konu uzunluk ve uzaklık kavramlarını açıklamak için kullanılmıştır. Bu bölümde öklit
İÇ ÇARPIM UZAYLARI 7. BÖLÜM İÇ ÇARPIM UZAYLARI Genel: Vektörler bölümünde vektörel iç çarpım;.= 1 1 + + Açıklanmış ve bu konu uzunluk ve uzaklık kavramlarını açıklamak için kullanılmıştır. Bu bölümde öklit
Temel Kavramlar. (r) Sıfırdan farklı kompleks sayılar kümesi: C. (i) Rasyonel sayılar kümesi: Q = { a b
 Sıfırdan farklı kompleks sayılar kümesi: C. (i) Rasyonel sayılar kümesi: Q = { a b") Bölüm 1 Temel Kavramlar Bu bölümde bağıntı ve fonksiyon gibi bazı temel kavramlar üzerinde durulacak, tamsayıların bazı özellikleri ele alınacaktır. Bu çalışma boyunca kullanılacak bazı kümelerin gösterimleri
Bölüm 1 Temel Kavramlar Bu bölümde bağıntı ve fonksiyon gibi bazı temel kavramlar üzerinde durulacak, tamsayıların bazı özellikleri ele alınacaktır. Bu çalışma boyunca kullanılacak bazı kümelerin gösterimleri
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI
 KENAR BELİRLEME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
ii) S 2LW 2WH 2LW 2WH S 2WH 2LW S 3( x 1) 5( x 2) 5 3x 3 5x x Maliye Bölümü EKON 103 Matematik I / Mart 2018 Proje 2 CEVAPLAR C.1) C.
 S 2LW 2WH 2LW 2WH S 2WH 2LW S 3( x 1) 5( x 2) 5 3x 3 5x x Maliye Bölümü EKON 103 Matematik I / Mart 2018 Proje 2 CEVAPLAR C.1) C.") C.1) x1 x 1 4 4( x1) x 6 4x 4 x 6 x 46 x Maliye Bölümü EKON 10 Matematik I / Mart 018 Proje CEVAPLAR C.) i) S LW WH LW WH S LW WH S W W W S L H W ii) S LW WH WH LW S WH LW S W W W S H L W C.) ( x1) 5(
C.1) x1 x 1 4 4( x1) x 6 4x 4 x 6 x 46 x Maliye Bölümü EKON 10 Matematik I / Mart 018 Proje CEVAPLAR C.) i) S LW WH LW WH S LW WH S W W W S L H W ii) S LW WH WH LW S WH LW S W W W S H L W C.) ( x1) 5(
YZM ALGORİTMA ANALİZİ VE TASARIM DERS#3: ALGORİTMA ANALİZİ#2
 YZM 3207- ALGORİTMA ANALİZİ VE TASARIM DERS#3: ALGORİTMA ANALİZİ#2 Özyineli Olmayan (Nonrecursive) Algoritmaların Matematiksel Analizi En büyük elemanı bulma problemi En Büyük Elemanı Bulma Problemi Girdi
YZM 3207- ALGORİTMA ANALİZİ VE TASARIM DERS#3: ALGORİTMA ANALİZİ#2 Özyineli Olmayan (Nonrecursive) Algoritmaların Matematiksel Analizi En büyük elemanı bulma problemi En Büyük Elemanı Bulma Problemi Girdi
Fotogrametrinin Optik ve Matematik Temelleri
 Fotogrametrinin Optik ve Matematik Temelleri Resim düzlemi O : İzdüşüm (projeksiyon ) merkezi P : Arazi noktası H : Asal nokta N : Nadir noktası c : Asal uzaklık H OH : Asal eksen (Alım ekseni) P OP :
Fotogrametrinin Optik ve Matematik Temelleri Resim düzlemi O : İzdüşüm (projeksiyon ) merkezi P : Arazi noktası H : Asal nokta N : Nadir noktası c : Asal uzaklık H OH : Asal eksen (Alım ekseni) P OP :
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
ÖABT Lineer Cebir KONU TESTİ Matris Cebiri
 ÖB Lineer Cebir KONU ESİ Matris Cebiri. i, j,, i için j i j a j i j a. j i j a. i için j i j a 4 6 j i j a 4 j i j a. 6. 0 0 0 4 0 0 0. 4 6 n 0 0 n 6 Cevap: D Cevap:. I. I I I 0 I 0 0 0..I I I 00 0 0 0
ÖB Lineer Cebir KONU ESİ Matris Cebiri. i, j,, i için j i j a j i j a. j i j a. i için j i j a 4 6 j i j a 4 j i j a. 6. 0 0 0 4 0 0 0. 4 6 n 0 0 n 6 Cevap: D Cevap:. I. I I I 0 I 0 0 0..I I I 00 0 0 0
MATLAB. Fen ve Mühendislik Uygulamaları ile. Doç. Dr. M. Akif CEVİZ. MATLAB de Dizi Kavramı
 Fen ve Mühislik Uygulamaları ile MATLAB Doç. Dr. M. Akif CEVİZ Atatürk Üniversitesi Mühislik Fakültesi Makine Mühisliği Bölümü MATLAB de Diziler; Vektörler ve MAtrisler Skaler, Dizi, Matrix Sklaer, bir
Fen ve Mühislik Uygulamaları ile MATLAB Doç. Dr. M. Akif CEVİZ Atatürk Üniversitesi Mühislik Fakültesi Makine Mühisliği Bölümü MATLAB de Diziler; Vektörler ve MAtrisler Skaler, Dizi, Matrix Sklaer, bir
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
AKT 305 Aktüeryal Yazılımlar Ödev 1 Yanıtları Soru 1. Create a vector x with the elements...
 AKT 305 Aktüeryal Yazılımlar Ödev 1 Yanıtları Soru 1. Create a vector x with the elements... a. 2, 4, 6, 8,...,10 >> [2:2:10] 2 4 6 8 10 b. 10, 8, 6, 4, 2, 0, -2, -4 >> [10:-2:-4] 10 8 6 4 2 0-2 -4 c.
AKT 305 Aktüeryal Yazılımlar Ödev 1 Yanıtları Soru 1. Create a vector x with the elements... a. 2, 4, 6, 8,...,10 >> [2:2:10] 2 4 6 8 10 b. 10, 8, 6, 4, 2, 0, -2, -4 >> [10:-2:-4] 10 8 6 4 2 0-2 -4 c.
GRAPH LAR Düzce Üniversitesi Teknoloji Fakültesi VERİ YAPILARI. Bilgisayar Mühendisliği ÖĞR.GÖR.GÜNAY TEMÜR 1
 VERİ YAPILARI GRAPH LAR Düzce Üniversitesi Teknoloji Fakültesi Bilgisayar Mühendisliği ÖĞR.GÖR.GÜNAY TEMÜR 1 GRAPH (ÇİZGE - GRAF) Terminoloji Çizge Kullanım Alanları Çizge Gösterimi Komşuluk Matrisi Komşuluk
VERİ YAPILARI GRAPH LAR Düzce Üniversitesi Teknoloji Fakültesi Bilgisayar Mühendisliği ÖĞR.GÖR.GÜNAY TEMÜR 1 GRAPH (ÇİZGE - GRAF) Terminoloji Çizge Kullanım Alanları Çizge Gösterimi Komşuluk Matrisi Komşuluk
ERCİYES ÜNİVERSİTESİ KİMYA ANABİLİM DALI
 İlaç Tasarımında Yeni Yazılımların Geliştirilmesi: Elektron Konformasyonel-Genetik Algoritma Metodu ile Triaminotriazin Bileşiklerinde Farmakofor Belirlenmesi ve Nicel Biyoaktivite Hesabı; ERCİYES ÜNİVERSİTESİ
İlaç Tasarımında Yeni Yazılımların Geliştirilmesi: Elektron Konformasyonel-Genetik Algoritma Metodu ile Triaminotriazin Bileşiklerinde Farmakofor Belirlenmesi ve Nicel Biyoaktivite Hesabı; ERCİYES ÜNİVERSİTESİ
3.2. DP Modellerinin Simpleks Yöntem ile Çözümü Primal Simpleks Yöntem
 3.2. DP Modellerinin Simpleks Yöntem ile Çözümü 3.2.1. Primal Simpleks Yöntem Grafik çözüm yönteminde gördüğümüz gibi optimal çözüm noktası, her zaman uygun çözüm alanının bir köşe noktası ya da uç noktası
3.2. DP Modellerinin Simpleks Yöntem ile Çözümü 3.2.1. Primal Simpleks Yöntem Grafik çözüm yönteminde gördüğümüz gibi optimal çözüm noktası, her zaman uygun çözüm alanının bir köşe noktası ya da uç noktası
Hafta 11 Çok Boyutlu Diziler
 BLM111 Programlama Dilleri I Hafta 11 Çok Boyutlu Diziler Dr. Öğr. Üyesi Caner ÖZCAN Çok Boyutlu Diziler Bir dizi birden fazla boyutlu olabilir. Örneğin 3x4 bir matris için 2 boyutlu bir dizi kullanırız.
BLM111 Programlama Dilleri I Hafta 11 Çok Boyutlu Diziler Dr. Öğr. Üyesi Caner ÖZCAN Çok Boyutlu Diziler Bir dizi birden fazla boyutlu olabilir. Örneğin 3x4 bir matris için 2 boyutlu bir dizi kullanırız.
GEO182 Lineer Cebir. Matrisler. Matrisler. Dersi Veren: Dr. İlke Deniz Derse Devam: %70. Vize Sayısı: 1
 GEO182 Lineer Cebir Dersi Veren: Dr. İlke Deniz 2018 GEO182 Lineer Cebir Derse Devam: %70 Vize Sayısı: 1 Başarı Notu: Yıl içi Başarı Notu %40 + Final Sınavı Notu %60 GEO182 Lineer Cebir GEO182 Lineer Cebir
GEO182 Lineer Cebir Dersi Veren: Dr. İlke Deniz 2018 GEO182 Lineer Cebir Derse Devam: %70 Vize Sayısı: 1 Başarı Notu: Yıl içi Başarı Notu %40 + Final Sınavı Notu %60 GEO182 Lineer Cebir GEO182 Lineer Cebir
KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I
 KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I 4.1. Dışbükeylik ve Uç Nokta Bir d.p.p. de model kısıtlarını aynı anda sağlayan X X X karar değişkenleri... n vektörüne çözüm denir. Eğer bu
KONU 4: DOĞRUSAL PROGRAMLAMA MODELİ İÇİN ÇÖZÜM YÖNTEMLERİ I 4.1. Dışbükeylik ve Uç Nokta Bir d.p.p. de model kısıtlarını aynı anda sağlayan X X X karar değişkenleri... n vektörüne çözüm denir. Eğer bu
Çok işlemli (multitasking) sistemlerde işlemler (process) kısıtlı kaynakları kullanmak zorundadırlar.
 sistemlerde işlemler (process) kısıtlı kaynakları kullanmak zorundadırlar.") Kilitlenme (Deadlock) 2 Çok işlemli (multitasking) sistemlerde işlemler (process) kısıtlı kaynakları kullanmak zorundadırlar. Bir işlem bir kaynak için talepte bulunur. Eğer bu kaynak müsait değilse, işlem
Kilitlenme (Deadlock) 2 Çok işlemli (multitasking) sistemlerde işlemler (process) kısıtlı kaynakları kullanmak zorundadırlar. Bir işlem bir kaynak için talepte bulunur. Eğer bu kaynak müsait değilse, işlem
YZM 3217 YAPAY ZEKA DERS#10: KÜMELEME
 YZM 317 YAPAY ZEKA DERS#10: KÜMELEME Sınıflandırma (Classification) Eğiticili (supervised) sınıflandırma: Sınıflandırma: Sınıf sayısı ve bir grup örneğin hangi sınıfa ait olduğunu bilinir Eğiticisiz (unsupervised)
YZM 317 YAPAY ZEKA DERS#10: KÜMELEME Sınıflandırma (Classification) Eğiticili (supervised) sınıflandırma: Sınıflandırma: Sınıf sayısı ve bir grup örneğin hangi sınıfa ait olduğunu bilinir Eğiticisiz (unsupervised)
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
Uzaktan Algılama Uygulamaları
 Aksaray Üniversitesi Uzaktan Algılama Uygulamaları Doç.Dr. Semih EKERCİN Harita Mühendisliği Bölümü sekercin@aksaray.edu.tr 2010-2011 Bahar Yarıyılı Uzaktan Algılama Uygulamaları GÖRÜNTÜ İŞLEME TEKNİKLERİ
Aksaray Üniversitesi Uzaktan Algılama Uygulamaları Doç.Dr. Semih EKERCİN Harita Mühendisliği Bölümü sekercin@aksaray.edu.tr 2010-2011 Bahar Yarıyılı Uzaktan Algılama Uygulamaları GÖRÜNTÜ İŞLEME TEKNİKLERİ
Geliştirilmiş Fisher Ayraç Kriteri Kullanarak Hiperspektral Görüntülerde Sınıflandırma
 Geliştirilmiş Fisher Ayraç Kriteri Kullanarak Hiperspektral Görüntülerde Sınıflandırma Mustafa TEKE, Dr. Ufuk SAKARYA TÜBİTAK UZAY IEEE 21. Sinyal İşleme, İletişim ve Uygulamaları Kurultayı (SİU 2013),
Geliştirilmiş Fisher Ayraç Kriteri Kullanarak Hiperspektral Görüntülerde Sınıflandırma Mustafa TEKE, Dr. Ufuk SAKARYA TÜBİTAK UZAY IEEE 21. Sinyal İşleme, İletişim ve Uygulamaları Kurultayı (SİU 2013),
Bilgisayar Grafikleri
 Bilgisayar Grafikleri Konular: Cismin Tanımlanması Bilindiği gibi iki boyutta noktalar x ve y olmak üzere iki boyutun koordinatları şeklinde ifade edilirler. Üç boyutta da üçüncü boyut olan z ekseni üçücü
Bilgisayar Grafikleri Konular: Cismin Tanımlanması Bilindiği gibi iki boyutta noktalar x ve y olmak üzere iki boyutun koordinatları şeklinde ifade edilirler. Üç boyutta da üçüncü boyut olan z ekseni üçücü
ARAZİ ÖLÇMELERİ. İki Boyutlu Koordinat sistemleri Arası Dönüşüm
 İki Boyutlu Koordinat sistemleri Arası Dönüşüm Amaç, bir koordinat sistemine göre elde edilmiş olan koordinatların, diğer bir koordinat sistemindeki koordinat değerlerini elde etmektir. İki haritanın koordinat
İki Boyutlu Koordinat sistemleri Arası Dönüşüm Amaç, bir koordinat sistemine göre elde edilmiş olan koordinatların, diğer bir koordinat sistemindeki koordinat değerlerini elde etmektir. İki haritanın koordinat
Lineer Cebir. Doç. Dr. Niyazi ŞAHİN TOBB. İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler
 Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı : Bilgisayar Mühendisliğinde Matematik Uygulamaları
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı : Bilgisayar Mühendisliğinde Matematik Uygulamaları
ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ
 ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü ULAŞTIRMA MODELİNİN TANIMI Ulaştırma modeli, doğrusal programlama probleminin özel bir şeklidir.
ULAŞTIRMA MODELİ VE ÇEŞİTLİ ULAŞTIRMA MODELLERİ Özlem AYDIN Trakya Üniversitesi Bilgisayar Mühendisliği Bölümü ULAŞTIRMA MODELİNİN TANIMI Ulaştırma modeli, doğrusal programlama probleminin özel bir şeklidir.
FOTOGRAMETRİK DEĞERLENDİRME - ÇİFT FOT. DEĞ. Analog ve Analitik Stereodeğerlendirme. Yrd. Doç. Dr. Aycan M. MARANGOZ
 FOTOGRAMETRİ II FOTOGRAMETRİK DEĞERLENDİRME - ÇİFT FOT. DEĞ. Analog ve Analitik Stereodeğerlendirme BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF336 FOTOGRAMETRİ II DERSi NOTLARI http://geomatik.beun.edu.tr/marangoz/
FOTOGRAMETRİ II FOTOGRAMETRİK DEĞERLENDİRME - ÇİFT FOT. DEĞ. Analog ve Analitik Stereodeğerlendirme BEÜ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ JDF336 FOTOGRAMETRİ II DERSi NOTLARI http://geomatik.beun.edu.tr/marangoz/
Matris İşlemleri Uygulaması
 Matris İşlemleri Uygulaması Uygulama Konusu Uygulama 3x3 boyutlu matrislerle toplama, çıkarma ve çarpma işlemleri üzerinedir. Toplama İşlemi AA = aa iiii mmmmmm ve BB = bb iiii mmmmmm aynı tipte iki matris
Matris İşlemleri Uygulaması Uygulama Konusu Uygulama 3x3 boyutlu matrislerle toplama, çıkarma ve çarpma işlemleri üzerinedir. Toplama İşlemi AA = aa iiii mmmmmm ve BB = bb iiii mmmmmm aynı tipte iki matris
GENELLEŞTİRİLMİŞ FUZZY KOMŞULUK SİSTEMİ ÜZERİNE
 ÖZEL EGE LİSESİ GENELLEŞTİRİLMİŞ FUZZY KOMŞULUK SİSTEMİ ÜZERİNE HAZIRLAYAN ÖĞRENCİ: Berk KORKUT DANIŞMAN ÖĞRETMEN: Gizem GÜNEL İZMİR 2013 İÇİNDEKİLER 1. PROJENİN AMACI 3.33 2. GİRİŞ... 3 3. YÖNTEM 3 4.
ÖZEL EGE LİSESİ GENELLEŞTİRİLMİŞ FUZZY KOMŞULUK SİSTEMİ ÜZERİNE HAZIRLAYAN ÖĞRENCİ: Berk KORKUT DANIŞMAN ÖĞRETMEN: Gizem GÜNEL İZMİR 2013 İÇİNDEKİLER 1. PROJENİN AMACI 3.33 2. GİRİŞ... 3 3. YÖNTEM 3 4.
Matris Cebiriyle Çoklu Regresyon Modeli
 Matris Cebiriyle Çoklu Regresyon Modeli Hüseyin Taştan Mart 00 Klasik Regresyon Modeli k açıklayıcı değişkenden oluşan regresyon modelini her gözlem i için aşağıdaki gibi yazabiliriz: y i β + β x i + β
Matris Cebiriyle Çoklu Regresyon Modeli Hüseyin Taştan Mart 00 Klasik Regresyon Modeli k açıklayıcı değişkenden oluşan regresyon modelini her gözlem i için aşağıdaki gibi yazabiliriz: y i β + β x i + β
Matrisler Matris Tanımı m satır ve n sütundan oluşan tablosuna matris adı verilir.
 MATRIS Matrisler Matris Tanımı m satır ve n sütundan oluşan tablosuna matris adı verilir. Matristeki her bir sayıya eleman denir. Yukarıdaki matriste m n tane eleman vardır. Matrisin yatay bir doğru boyunca
MATRIS Matrisler Matris Tanımı m satır ve n sütundan oluşan tablosuna matris adı verilir. Matristeki her bir sayıya eleman denir. Yukarıdaki matriste m n tane eleman vardır. Matrisin yatay bir doğru boyunca
MATRİSLER. Şekil 1 =A6:B7+D6:E7
 MATRİSLER Bir A matrisi mxn adet gerçel veya sanal elemanların sıralı koleksiyonudur. Bu koleksiyon m satır ve n sütun ile düzenlenir. A(mxn) notasyonu matrisin m satırlı n sütunlu olduğunu gösterir ve
MATRİSLER Bir A matrisi mxn adet gerçel veya sanal elemanların sıralı koleksiyonudur. Bu koleksiyon m satır ve n sütun ile düzenlenir. A(mxn) notasyonu matrisin m satırlı n sütunlu olduğunu gösterir ve
Sonlu Elemanlar Yöntemi İle EKG İşareti Benzetimi
 Sonlu Elemanlar Yöntemi İle EKG İşareti Benzetimi Serkan Onart, Y. Ziya İder Bilkent Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü Bilkent, 06533, Ankara onart@ee.bilkent.edu.tr, ider@ee.bilkent.edu.tr
Sonlu Elemanlar Yöntemi İle EKG İşareti Benzetimi Serkan Onart, Y. Ziya İder Bilkent Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü Bilkent, 06533, Ankara onart@ee.bilkent.edu.tr, ider@ee.bilkent.edu.tr
MATLAB a GİRİŞ. Doç. Dr. Mehmet İTİK. Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü
 MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
Görüntü İyileştirme Teknikleri. Hafta-8
 Görüntü İyileştirme Teknikleri Hafta-8 1 Spektral İyileştirme PCA (Principal Component Analysis) Dönüşümü. Türkçesi Ana Bileşenler Dönüşümü Decorrelation Germe Tasseled Cap RGB den IHS ye dönüşüm IHS den
Görüntü İyileştirme Teknikleri Hafta-8 1 Spektral İyileştirme PCA (Principal Component Analysis) Dönüşümü. Türkçesi Ana Bileşenler Dönüşümü Decorrelation Germe Tasseled Cap RGB den IHS ye dönüşüm IHS den
A GRUBU Noktaları adlandırılmış K 6 tam çizgesinin tam olarak 3 noktalı kaç tane alt çizgesi vardır? A) 9 B) 20 C) 24 D) 60 E) 160
 9 B) 20 C) 24 D) 60 E) 160") A GRUBU.. Numarası :............................................. Adı Soyadı :............................................. SINAV YÖNERGESİ İşaretlemelerinizde kurşun kalem kullanınız. Soru ve cevap kağıtlarına
A GRUBU.. Numarası :............................................. Adı Soyadı :............................................. SINAV YÖNERGESİ İşaretlemelerinizde kurşun kalem kullanınız. Soru ve cevap kağıtlarına
DEPREM KONUMLARININ BELİRLENMESİNDE BULANIK MANTIK YAKLAŞIMI
 DEPREM KONUMLRININ BELİRLENMESİNDE BULNIK MNTIK YKLŞIMI Koray BODUR 1 ve Hüseyin GÖKLP 2 ÖZET: 1 Yüksek lisans öğrencisi, Jeofizik Müh. Bölümü, Karadeniz Teknik Üniversitesi, Trabzon 2 Yrd. Doç. Dr., Jeofizik
DEPREM KONUMLRININ BELİRLENMESİNDE BULNIK MNTIK YKLŞIMI Koray BODUR 1 ve Hüseyin GÖKLP 2 ÖZET: 1 Yüksek lisans öğrencisi, Jeofizik Müh. Bölümü, Karadeniz Teknik Üniversitesi, Trabzon 2 Yrd. Doç. Dr., Jeofizik
Dijital Fotogrametri
 Dijital Fotogrametri 2016-2017, Bahar YY Fevzi Karslı (Prof. Dr.) Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 20 Mart 2017 Pazartesi Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, kavramlar,
Dijital Fotogrametri 2016-2017, Bahar YY Fevzi Karslı (Prof. Dr.) Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 20 Mart 2017 Pazartesi Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, kavramlar,
Bulanık Mantık Hız Kontrolü Destekli Distance Transform Yol Planlama
 Bulanık Mantık Hız Kontrolü Destekli Distance Transform Yol Planlama Suat Karakaya 1, Gürkan Küçükyıldız 2, Hasan Ocak 3 Mekatronik Mühendisliği Bölümü Kocaeli Üniversitesi, Kocaeli 1 suat.karakaya@kocaeli.edu.tr
Bulanık Mantık Hız Kontrolü Destekli Distance Transform Yol Planlama Suat Karakaya 1, Gürkan Küçükyıldız 2, Hasan Ocak 3 Mekatronik Mühendisliği Bölümü Kocaeli Üniversitesi, Kocaeli 1 suat.karakaya@kocaeli.edu.tr
HAVADAN LAZER TARAMA ve SAYISAL GÖRÜNTÜ VERİLERİNDEN BİNA TESPİTİ VE ÇATILARIN 3 BOYUTLU MODELLENMESİ
 Akdeniz Üniversitesi Uzay Bilimleri ve Teknolojileri Bölümü Uzaktan Algılama Anabilim Dalı HAVADAN LAZER TARAMA ve SAYISAL GÖRÜNTÜ VERİLERİNDEN BİNA TESPİTİ VE ÇATILARIN 3 BOYUTLU MODELLENMESİ Dr.Nusret
Akdeniz Üniversitesi Uzay Bilimleri ve Teknolojileri Bölümü Uzaktan Algılama Anabilim Dalı HAVADAN LAZER TARAMA ve SAYISAL GÖRÜNTÜ VERİLERİNDEN BİNA TESPİTİ VE ÇATILARIN 3 BOYUTLU MODELLENMESİ Dr.Nusret
YZM ALGORİTMA ANALİZİ VE TASARIM DERS#2: ALGORİTMA ANALİZİ
 YZM 3207- ALGORİTMA ANALİZİ VE TASARIM DERS#2: ALGORİTMA ANALİZİ Algoritma Analizi Çerçevesi Algoritma Analizinde Göz Önünde Bulundurulması Gerekenler Neler? Algoritmanın Doğruluğu (Correctness) Zaman
YZM 3207- ALGORİTMA ANALİZİ VE TASARIM DERS#2: ALGORİTMA ANALİZİ Algoritma Analizi Çerçevesi Algoritma Analizinde Göz Önünde Bulundurulması Gerekenler Neler? Algoritmanın Doğruluğu (Correctness) Zaman
. [ ] vektörünü S deki vektörlerin bir lineer
![. [ ] vektörünü S deki vektörlerin bir lineer](/thumbs/19/198924.jpg ". [ ] vektörünü S deki vektörlerin bir lineer") 11.Gram-Schmidt metodu 11.1. Ortonormal baz 11.1.Teorem: { }, V Öklid uzayı için bir ortonormal baz olsun. Bu durumda olmak üzere. 1.Ö.: { }, de bir ortonormal baz olsun. Burada. vektörünü S deki vektörlerin
11.Gram-Schmidt metodu 11.1. Ortonormal baz 11.1.Teorem: { }, V Öklid uzayı için bir ortonormal baz olsun. Bu durumda olmak üzere. 1.Ö.: { }, de bir ortonormal baz olsun. Burada. vektörünü S deki vektörlerin
K En Yakın Komşu Methodu (KNearest Neighborhood)
") K En Yakın Komşu Methodu (KNearest Neighborhood) K-NN algoritması, Thomas. M. Cover ve Peter. E. Hart tarafından önerilen, örnek veri noktasının bulunduğu sınıfın ve en yakın komşunun, k değerine göre
K En Yakın Komşu Methodu (KNearest Neighborhood) K-NN algoritması, Thomas. M. Cover ve Peter. E. Hart tarafından önerilen, örnek veri noktasının bulunduğu sınıfın ve en yakın komşunun, k değerine göre
Yapisal Analiz Programi SAP2000 Bilgi Aktarimi ve Kullanimi
 Yapisal Analiz Programi SAP2000 Bilgi Aktarimi ve Kullanimi Dr. Bilge DORAN Dr. Sema NOYAN ALACALI ÖNSÖZ Günümüzde bilgisayar teknolojisinin hizla ilerlemesinin dogal bir sonucu olarak insaat mühendisligi
Yapisal Analiz Programi SAP2000 Bilgi Aktarimi ve Kullanimi Dr. Bilge DORAN Dr. Sema NOYAN ALACALI ÖNSÖZ Günümüzde bilgisayar teknolojisinin hizla ilerlemesinin dogal bir sonucu olarak insaat mühendisligi
Elemanter fonksiyonlarla yaklaşım ve hata
 Elemanter fonksiyonlarla yaklaşım ve hata Prof. Dr. Erhan Coşkun Karadeniz Teknik Üniversitesi, Fen Fakültesi Matematik Bölümü Kasım, 2018 e 5 Kasım, 2018 1 / 48 Elemanter fonksiyonlarla yaklaşım ve hata
Elemanter fonksiyonlarla yaklaşım ve hata Prof. Dr. Erhan Coşkun Karadeniz Teknik Üniversitesi, Fen Fakültesi Matematik Bölümü Kasım, 2018 e 5 Kasım, 2018 1 / 48 Elemanter fonksiyonlarla yaklaşım ve hata
Akış YILDIZ TEKNİK ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 Akış Makine Öğrenmesi nedir? Günlük Hayatımızdaki Uygulamaları Verilerin Sayısallaştırılması Özellik Belirleme Özellik Seçim Metotları Bilgi Kazancı (Informaiton Gain-IG) Sinyalin Gürültüye Oranı: (S2N
Akış Makine Öğrenmesi nedir? Günlük Hayatımızdaki Uygulamaları Verilerin Sayısallaştırılması Özellik Belirleme Özellik Seçim Metotları Bilgi Kazancı (Informaiton Gain-IG) Sinyalin Gürültüye Oranı: (S2N
AccTR Virtual Institute of Accelerator Physics. The Physics of Particle Accelerators An Introduction. Chapter : 3.12, 3.13
 AccTR Virtual Institute of Accelerator Physics http://www.cern.ch/acctr The Physics of Particle Accelerators An Introduction Klaus Wille Chapter : 3.12, 3.13 By Betül YASATEKİN 1.10.2012, Ankara 1 İçindekiler
AccTR Virtual Institute of Accelerator Physics http://www.cern.ch/acctr The Physics of Particle Accelerators An Introduction Klaus Wille Chapter : 3.12, 3.13 By Betül YASATEKİN 1.10.2012, Ankara 1 İçindekiler
Makine Öğrenmesi 3. hafta
 Makine Öğrenmesi 3. hafta Entropi Karar Ağaçları (Desicion Trees) ID3 C4.5 Sınıflandırma ve Regresyon Ağaçları (CART) Karar Ağacı Nedir? Temel fikir, giriş verisinin bir kümeleme algoritması yardımıyla
Makine Öğrenmesi 3. hafta Entropi Karar Ağaçları (Desicion Trees) ID3 C4.5 Sınıflandırma ve Regresyon Ağaçları (CART) Karar Ağacı Nedir? Temel fikir, giriş verisinin bir kümeleme algoritması yardımıyla
6. Sistemin toplam potansiyeli, rijitlik matrisi ve kurulması
 6 Sistemin toplam potansiyeli, rijitlik matrisi ve kurulması 6 Sistemin noktalarında süreklilik koşulu : Her elemanın düğüm noktası aynı zamanda sistemin de düğüm noktası olduğundan, sistemin noktaları
6 Sistemin toplam potansiyeli, rijitlik matrisi ve kurulması 6 Sistemin noktalarında süreklilik koşulu : Her elemanın düğüm noktası aynı zamanda sistemin de düğüm noktası olduğundan, sistemin noktaları
Bu bölümde; Çok ölçütlü karar verme yöntemlerinden biri olan TOPSİS yöntemi anlatılacaktır.
 ÇOK ÖLÇÜTLÜ KARAR VERME TOPSIS (Technique For Order Preference By Similarity To Ideal Solution) PROF. DR. İBRAHİM ÇİL 1 Bu bölümde; Çok ölçütlü karar verme yöntemlerinden biri olan TOPSİS yöntemi anlatılacaktır.
ÇOK ÖLÇÜTLÜ KARAR VERME TOPSIS (Technique For Order Preference By Similarity To Ideal Solution) PROF. DR. İBRAHİM ÇİL 1 Bu bölümde; Çok ölçütlü karar verme yöntemlerinden biri olan TOPSİS yöntemi anlatılacaktır.
İki Boyutlu Yapılar için Doğrudan Rijitlik Metodu (Direct Stiffness Method) (İleri Yapı Statiği II. Kısım)
 (İleri Yapı Statiği II. Kısım)") İki Boyutlu Yapılar için Doğrudan Rijitlik Metodu (Direct Stiffness Method) (İleri Yapı Statiği II. Kısım) Doç. Dr. Özgür Özçelik Dokuz Eylül Üniversitesi, Müh. Fak., İnşaat Müh. Böl. Genel Genel Genel
İki Boyutlu Yapılar için Doğrudan Rijitlik Metodu (Direct Stiffness Method) (İleri Yapı Statiği II. Kısım) Doç. Dr. Özgür Özçelik Dokuz Eylül Üniversitesi, Müh. Fak., İnşaat Müh. Böl. Genel Genel Genel
METASEZGİSEL YÖNTEMLER
 METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
METASEZGİSEL YÖNTEMLER Ara sınav - 30% Ödev (Haftalık) - 20% Final (Proje Sunumu) - 50% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn: Zaman çizelgeleme, en kısa yol bulunması,
7. Kafes sistem sayısal örnekleri
 7. Kafes sistem sayısal örnekleri 7. Düzlem kafes sistem sayısal örneği Şekil 7. deki kafes sistem elastisite modülü.. 5 N/mm olan çelik borulardan imal edilmiştir. a noktasındaki kuvvetlerinden oluşan:
7. Kafes sistem sayısal örnekleri 7. Düzlem kafes sistem sayısal örneği Şekil 7. deki kafes sistem elastisite modülü.. 5 N/mm olan çelik borulardan imal edilmiştir. a noktasındaki kuvvetlerinden oluşan:
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
KABA KÜME TEORİSİ (Rough Set Theory) Dr. Sedat TELÇEKEN
 Dr. Sedat TELÇEKEN") KABA KÜME TEORİSİ (Rough Set Theory) Dr. Sedat TELÇEKEN Giriş Bilgi teknolojisindeki gelişmeler ve verilerin dijital ortamda saklanmaya başlanması ile yeryüzündeki bilgi miktarı her 20 ayda iki katına
KABA KÜME TEORİSİ (Rough Set Theory) Dr. Sedat TELÇEKEN Giriş Bilgi teknolojisindeki gelişmeler ve verilerin dijital ortamda saklanmaya başlanması ile yeryüzündeki bilgi miktarı her 20 ayda iki katına
Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar
 BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
İç-Çarpım Uzayları ÜNİTE. Amaçlar. İçindekiler. Yazar Öğr. Grv. Dr. Nevin ORHUN
 İç-Çarpım Uzayları Yazar Öğr. Grv. Dr. Nevin ORHUN ÜNİTE Amaçlar Bu üniteyi çalıştıktan sonra; R n, P n (R), M nxn vektör uzaylarında iç çarpım kavramını tanıyacak ve özelliklerini görmüş olacaksınız.
İç-Çarpım Uzayları Yazar Öğr. Grv. Dr. Nevin ORHUN ÜNİTE Amaçlar Bu üniteyi çalıştıktan sonra; R n, P n (R), M nxn vektör uzaylarında iç çarpım kavramını tanıyacak ve özelliklerini görmüş olacaksınız.
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EM302 Yöneylem Araştırması 2. Dr. Özgür Kabak
 EM302 Yöneylem Araştırması 2 Dr. Özgür Kabak TP Çözümü TP problemlerinin çözümü için başlıca iki yaklaşım vardır kesme düzlemleri (cutting planes) dal sınır (branch and bound) tüm yaklaşımlar tekrarlı
EM302 Yöneylem Araştırması 2 Dr. Özgür Kabak TP Çözümü TP problemlerinin çözümü için başlıca iki yaklaşım vardır kesme düzlemleri (cutting planes) dal sınır (branch and bound) tüm yaklaşımlar tekrarlı
Adana Toplu Taşıma Eğilimleri
 Adana Toplu Taşıma Eğilimleri Doç. Dr. Mustafa Gök Elektrik Elektronik Mühendisliği Bilgisayar Bilimleri Ana Bilim Dalı Başkanı 13.06.2014 Doç. Dr. Mustafa Gök (Ç. Ü.) Adana Toplu Taşıma Eğilimleri 13.06.2014
Adana Toplu Taşıma Eğilimleri Doç. Dr. Mustafa Gök Elektrik Elektronik Mühendisliği Bilgisayar Bilimleri Ana Bilim Dalı Başkanı 13.06.2014 Doç. Dr. Mustafa Gök (Ç. Ü.) Adana Toplu Taşıma Eğilimleri 13.06.2014
ÇİZGE KURAMI KESİKLİ MATEMATİKSEL YAPILAR GÜZ
 ÇİZGE KURAMI KESİKLİ MATEMATİKSEL YAPILAR 2012-2013 GÜZ Çizgeler Yollar ve Çevrimler Çizge Olarak Modelleme Çizge Olarak Modelleme Yönlü Çizge Kenar - Köşe 2 / 90 Çizgeler Yollar ve Çevrimler Çizge Olarak
ÇİZGE KURAMI KESİKLİ MATEMATİKSEL YAPILAR 2012-2013 GÜZ Çizgeler Yollar ve Çevrimler Çizge Olarak Modelleme Çizge Olarak Modelleme Yönlü Çizge Kenar - Köşe 2 / 90 Çizgeler Yollar ve Çevrimler Çizge Olarak
Elementer matrisler, ters matrisi bulmak, denk matrisler
 4.Konu Elementer matrisler, ters matrisi bulmak, denk matrisler 1. Elementer matrisler 2. Ters matrisi bulmak 3. Denk matrisler 1.Elementer matrisler 1.Tanım: tipinde Tip I., Tip II. veya Tip III. te olan
4.Konu Elementer matrisler, ters matrisi bulmak, denk matrisler 1. Elementer matrisler 2. Ters matrisi bulmak 3. Denk matrisler 1.Elementer matrisler 1.Tanım: tipinde Tip I., Tip II. veya Tip III. te olan
ÖZET...V ABSTRACT...VII TEŞEKKÜR... IX ŞEKİLLER DİZİNİ... XIV SÖZLÜK... XIX
 XI İÇİNDEKİLER ÖZET...V ABSTRACT...VII TEŞEKKÜR... IX ŞEKİLLER DİZİNİ... XIV SÖZLÜK... XIX 1. GİRİŞ... 1 2. PLANLAMANIN TARİHÇESİ... 7 2.1 Literatürdeki Planlayıcılar ve Kullandıkları Problem... Gösterimi
XI İÇİNDEKİLER ÖZET...V ABSTRACT...VII TEŞEKKÜR... IX ŞEKİLLER DİZİNİ... XIV SÖZLÜK... XIX 1. GİRİŞ... 1 2. PLANLAMANIN TARİHÇESİ... 7 2.1 Literatürdeki Planlayıcılar ve Kullandıkları Problem... Gösterimi
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MATLAB A GİRİŞ. EE-346 Hafta-1 Dr. Ayşe DEMİRHAN
 MATLAB A GİRİŞ EE-346 Hafta-1 Dr. Ayşe DEMİRHAN MATLAB Teknik ve bilimsel hesaplamalar için yazılmış yüksek performanslı bir yazılım geliştirme aracı MATrix LABoratory (MATLAB) Boyutlandırma gerekmeyen
MATLAB A GİRİŞ EE-346 Hafta-1 Dr. Ayşe DEMİRHAN MATLAB Teknik ve bilimsel hesaplamalar için yazılmış yüksek performanslı bir yazılım geliştirme aracı MATrix LABoratory (MATLAB) Boyutlandırma gerekmeyen
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Lineer Bağımlılık ve Lineer Bağımsızlık
 Lineer Bağımlılık ve Lineer Bağımsızlık Yazar Öğr.Grv.Dr.Nevin ORHUN ÜNİTE 5 Amaçlar Bu üniteyi çalıştıktan sonra; Vektör uzayı ve alt uzay yapısını daha iyi tanıyacak, Bir vektör uzayındaki vektörlerin
Lineer Bağımlılık ve Lineer Bağımsızlık Yazar Öğr.Grv.Dr.Nevin ORHUN ÜNİTE 5 Amaçlar Bu üniteyi çalıştıktan sonra; Vektör uzayı ve alt uzay yapısını daha iyi tanıyacak, Bir vektör uzayındaki vektörlerin
Elastisite Teorisi Polinomlar ile Çözüm Örnek 2
 Elastisite Teorisi Polinomlar ile Çözüm Örnek 2 Böylece aşağıdaki gerilme ifadelerine ulaşılır: Bu problem için yer değiştirme denklemleri aşağıdaki şekilde türetilir: Elastisite Teorisi Polinomlar ile
Elastisite Teorisi Polinomlar ile Çözüm Örnek 2 Böylece aşağıdaki gerilme ifadelerine ulaşılır: Bu problem için yer değiştirme denklemleri aşağıdaki şekilde türetilir: Elastisite Teorisi Polinomlar ile
Okut. Yüksel YURTAY. İletişim : (264) Sayısal Analiz. Algoritma & Matlab.
 Sayısal Analiz. Algoritma & Matlab.") Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Algoritma & Matlab 1 Algoritma Algoritma ; verilerin bilgisayara hangi çevre biriminden
Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Algoritma & Matlab 1 Algoritma Algoritma ; verilerin bilgisayara hangi çevre biriminden
VERİ YAPILARI. GRAPH LAR Düzce Üniversitesi Teknoloji Fakültesi ÖĞR.GÖR.GÜNAY TEMÜR 1
 VERİ YAPILARI GRAPH LAR Düzce Üniversitesi Teknoloji Fakültesi ÖĞR.GÖR.GÜNAY TEMÜR 1 GRAPH (ÇİZGE - GRAF) Terminoloji Çizge Kullanım Alanları Çizge Gösterimi Komşuluk Matrisi Komşuluk Listesi Çizge Üzerinde
VERİ YAPILARI GRAPH LAR Düzce Üniversitesi Teknoloji Fakültesi ÖĞR.GÖR.GÜNAY TEMÜR 1 GRAPH (ÇİZGE - GRAF) Terminoloji Çizge Kullanım Alanları Çizge Gösterimi Komşuluk Matrisi Komşuluk Listesi Çizge Üzerinde
BMB204. Veri Yapıları Ders 12. Dizgi Eşleme (String Matching) Algoritmaları İleri Veri Yapıları
 Algoritmaları İleri Veri Yapıları") BMB204. Veri Yapıları Ders 12. Dizgi Eşleme (String Matching) Algoritmaları İleri Veri Yapıları Erdinç Uzun NKÜ Çorlu Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Dersin Planı Dizgi Eşleme Algoritmaları
BMB204. Veri Yapıları Ders 12. Dizgi Eşleme (String Matching) Algoritmaları İleri Veri Yapıları Erdinç Uzun NKÜ Çorlu Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Dersin Planı Dizgi Eşleme Algoritmaları
 KAMU PERSONEL SEÇME SINAVI ÖĞRETMENLİK ALAN BİLGİSİ TESTİ ORTAÖĞRETİM MATEMATİK ÖĞRETMENLİĞİ TG 4 ÖABT ORTAÖĞRETİM MATEMATİK Bu testlerin her hakkı saklıdır. Hangi amaçla olursa olsun, testlerin tamamının
KAMU PERSONEL SEÇME SINAVI ÖĞRETMENLİK ALAN BİLGİSİ TESTİ ORTAÖĞRETİM MATEMATİK ÖĞRETMENLİĞİ TG 4 ÖABT ORTAÖĞRETİM MATEMATİK Bu testlerin her hakkı saklıdır. Hangi amaçla olursa olsun, testlerin tamamının
YZM 2116 Veri Yapıları
 YZM 2116 Veri Yapıları Yrd. Doç. Dr. Deniz KILINÇ Celal Bayar Üniversitesi Hasan Ferdi Turgutlu Teknoloji Fakültesi Yazılım Mühendisliği BÖLÜM - 11 Bu bölümde, Graph (Çizge - Graf) Terminoloji Çizge Kullanım
YZM 2116 Veri Yapıları Yrd. Doç. Dr. Deniz KILINÇ Celal Bayar Üniversitesi Hasan Ferdi Turgutlu Teknoloji Fakültesi Yazılım Mühendisliği BÖLÜM - 11 Bu bölümde, Graph (Çizge - Graf) Terminoloji Çizge Kullanım