TAŞITLARDA BAŞVURMA HAREKETİ ANINDA SALINIM MERKEZİ KONUM DEĞİŞİMİNİN SÜRÜŞ KONFORUNA ETKİSİNİN ANALİZİ
|
|
|
- Erdem Sarı
- 5 yıl önce
- İzleme sayısı:
Transkript
1 Gazi Üniv. Müh. Mim. Fak. De. J. Fac. Eng. Ach. Gazi Univ. Cit, No 3, 87-97, 007 Vo, No 3, 87-97, 007 TAŞITLARDA BAŞVURMA HAREKETİ ANINDA SALINIM MERKEZİ KONUM DEĞİŞİMİNİN SÜRÜŞ KONFORUNA ETKİSİNİN ANALİZİ Hakan KÖYLÜ ve Ai ÇINAR Makine Eğitimi Böümü, Teknik Eğitim Fakütesi, Kocaei Ünivesitesi, 41380, Umuttepe, İzmit-Kocaei (Geiş/Received: ; Kabu/Accepted: ) ÖZET Taşıt gövdesinin başvuma haeketi anında ön ve aka aks üzeinde otaya çıkan yük saınımaının süeki oaak taşıt gövdesini başvuma haeketi yapmaya zoaması, süüş konounu kötüeştimektedi. Bu pobemi çözmek amacıya, aksa üzeindeki yük saınımaını azataak süüş konounu düzetebien bi öçüt tespit edimeye çaışımıştı. Bu çaışmada, öçüt oaak başvuma ve kakım saınım mekezeinin haeketei seçimişti. Bu öçütün süüş konounu düzetecek özeikeini tespit etmek için, saınım mekezi konumaı taşıtın ağıık mekezine göe değiştiimişti. Bu değişimin süüş konouna etkiei, aks üzeinde ve aks aaığının ota noktasında büyütme onksiyonu ie hesapanan başvuma ve kakım ivme genikeine göe inceenmişti. Bu ivme genikeinin akı taşıt hızı ve aks aaıkaına göe değişimein ekans cevapaının simüasyonu, MATLAB pogamı ie yapımıştı. Simüasyon sonucunda, başvuma haeketi anında saınım mekezeinin yo uyaı ekansına göe beii noktaaa haeket etmesinin, süüş konounu iyieştiebieceği göümüştü. Bunun sonucunda beienen yönede haeket eden saınım mekezinin, süspansiyon özeiği seçimi için bi öçüt oabieceği beienmişti. Anahta keimee: Taşıt, süspansiyon sistemi, süüş konou, başvuma haeketi, saınım mekezi. THE ANALYSIS OF THE EFFECT OF POSITION CHANGE OF OSCILLATION CENTER DURING PITCH MOTION ON THE RIDE COMFORT IN VEHICLES ABSTRACT The vehice body is constanty oced to pitch by the oad osciations occuing on the ont and ea axes duing the vehice pitch motion, which deteioates the ide comot. In ode to sove this pobem, a citeion which can impove the ide comot by deceasing eects o the oad tanse on the axes is aimed. In this study, the movement o pitch and bounce osciation centes is consideed as a citeion. To detemine the popeties o citeion which can impove the ide comot, the positions o the osciation cente have been changed with espect to cente o gavity o the vehice body. The eects o this change on the ide comot have been anayzed with espect to acceeation ampitudes computed at midde point o the wheebase and on the axes using magniication unction. The simuation o equency esponses o the changes o these acceeation ampitudes was caied out o dieent vehice speeds and wheebases, using MATLAB sotwae. The simuation esuts show that the ide comot can be impoved by moving the osciation centes to cetain points in eeence to the oad excitation equency. As a esut, it has been eveaed that the osciation cente positions moving at detemined diections can be a citeion o seecting suspension popeties. Keywods: Vehice, suspension system, ide comot, pitch motion, osciation cente. 1. GİRİŞ (INTRODUCTION) Taşıt gövdesinin başvuma ve kakım haeketi anında süüş konounun inceenmesinin amacı, ön ve aka aks aasında yocuaın yo düzgünsüzükeinden ne kada etkienebieceğini inceemekti [1]. Buadaki başvuma haeketi; taşıt gövdesinin (yayı kütenin) ağıık mekezi etaındaki açısa ye değiştimesini,
2 H. Köyü ve A. Çına Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi kakım haeketi de ağıık mekezinin düşey ve doğusa ye değiştimesini iade etmektedi. Başvuma haeketi anında süüş konounu beieyen en önemi aktö, yük tansei nedeniye aksa üzeinde otaya çıkan düşey yük saınımaıdı. Bu saınımaın taşıt gövdesinin başvuma ve kakım haeketini süeki uyaması sonucunda taşıt gövdesinin başvuma ivme genikei atmakta ve süüş konou kötüeşmektedi [, 3, 4]. Düşey yük saınımaının süüş konounu kötüeştimesini önemek için yük tansei miktaını azatan veya aks üzeine geen yük saınımaını çabuk sönümeyen süspansiyon sistemi özeikeine ihtiyaç duyumaktadı [5]. Başvuma haeketi anında etaında başvuma ve kakım haeketeinin meydana gediği saınım mekezi konumunun taşıt gövdesinin ağıık mekezine göe değişmesini sağayan süspansiyon özeikei, yük tanseinin süüş konounu ne kada etkieyeceğini beiemektedi [6, 7, 8, 9]. Saınım mekezeinin konumundaki değişim, (k, - k, = 0) eşitiği ie beienmektedi. Şöye ki, (k, = k, ) eşitiği, ağıık mekezi ie saınım mekezeinin çakıştığını ve (k, < k, ) ie (k, >k, ) eşitsizikei ise saınım mekezeinin konumunun ağıık mekezine göe değiştiğini iade etmektedi. Böyece, ön ve aka süspansiyon yay setikei aasındaki iişki, başvuma haeketi anında saınım mekezeinin taşıtın ağıık mekezine göe konumundaki değişimin yönünü beieyebimektedi [6, 10, 11, 1]. Ayıca, taşıt gövdesinin kütesi, başvuma jiasyon yaıçapı ve ağıık mekezinin ön ve aka aksa mesaesi de saınım mekezi konumaını değiştimektedi [10, 13]. Tükiye de kuanıan taşıtaın çoğunda süüş konou, pasi süspansiyon sistemei ie sağanmaktadı. Pasi süspansiyonda başvuma haeketi anında süüş konou; ön ve aka aks üzeindeki süspansiyon yayı, amotisö ve aks kütesi gibi titeşim eemanaının özeikei ie beienmektedi. Taşıt gövdesinin başvuma haeketi yo uyaısına göe süeki değiştiğinden aksa üzeine geen yük saınımaı da süeki değişmektedi. Yük saınımadaki bu değişim nedeniye süspansiyon eemanaının süüş konounu düzetecek özeikeinin tespit edimesinde zouka yaşanmaktadı. Bu zouğu aşmak amacıya, ön ve aka süspansiyon eemanaının özeikeini, taşıt gövdesinin başvuma haeketine göe beieyecek bi öçütün tespit edimesi geekmektedi. Wong ve Giespie çaışmaaında başvuma haeketi anında saınım mekezeinin haeket ettiimesi sayesinde süüş konounun iyieştiiebieceğini vuguamıştı [10,11]. Bu çaışmada bu önei göz önüne aınmış ve saınım mekezeinin haeketi öçüt oaak seçimişti. Bu öçütün süüş konounu düzetecek yöneini tespit edebimek için başvuma haeketi anında bu saınım mekezeinin konumu değiştiimişti. Bu değişimin aks üzeinde ve aks otasında meydana getidiği değişime ekans boyutunda inceenmişti. Bunun amacı, ekans cevapaından ede ediecek sonuçaa göe tespit ediecek öçüte sayesinde ön ve aka aks üzeine geen yük dağıımını konto etmek ve bunun sonucunda aksa üzeindeki yük saınımaının süüş konounu kötüeştiebiecek etkieini azatmaktı. Bu amaç doğutusunda başvuma ve kakım saınım mekezi konumaı, şeki (1) de göüen iki aksı döt sebestik deecei yaım taşıt modei sayesinde aynı ve akı değedeki ön ve aka süspansiyon yay setikei ie değiştiimişti.. TAŞIT MODELİ (VEHICLE MODEL) Bu çaışmada şeki 1 de göüen iki aksı ve döt sebestik deecei bi yaım taşıt modeinin simüasyonu MATLAB yazıım pogamı ie yapımıştı. Ön ve aka aksın mauz kaacağı yo uyaıaı tespit edidikten sona taşıt gövdesi ve aks kütesinin düşey ye değiştimeei, geneeştiimiş koodinat oaak seçimişti. Bu koodinataa göe dieansiye denkemei tüetebimek için (), (3) ve (4) denkemz φ Şeki 1. İki aksı ve döt sebestik deecei yaım taşıt modei (The ou degees o eedom ha ca mode with two axes) Bu çaışmada, süüş konounun öçütü oan başvuma ve kakım ivme genikeinin ekans cevabını ivme genikeinin yo geniğine oanını iade eden büyütme onksiyonu ie ede edebimek için ön ve aka aks, sinüs şekinde bi yo püüzüüğü ie uyaımıştı. Ancak, ön ve aka aksa etkiyen uyaıa aasında bi ak vadı. Yo püüzüüğü, ön aksı uyadıktan beii bi (Δt) zaman sona aka aksı etkiemektedi. Bu etkime zamanı, aks aaığının taşıt hızına oanı oan (/v) ie iade edimektedi [5]. Böyece, ön aksa geen uyaı h (t), aka aksa geen uyaı da h (t + Δt) ie iade edii. (b), yo geniği ve (ω), yo uyaı ekansı ise yo uyaıaı, matematikse oaak aşağıdaki gibi iade edimektedi. h (t) = b sin(ω t ) h (t+δt) = bsin(ωt+ω/v) (1) 88 Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3, 007
3 Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi H. Köyü ve A. Çına einde veien kinetik, potansiye ve sönüm eneji denkemei ie Ek de veien jacobian matisei kuanımıştı. İgii eneji denkemei aşağıdaki gibidi. Yayı ve yaysız kütenin geneeştiimiş koodinataına göe ede edien kinetik eneji denkemi, z&, - z& Ek = 0.5 [ m ( z& + (( z&, - z& ) )) + m i ( ) + m z& + m1, z& 1, ] () Yayı ve yaysız kütenin geneeştiimiş koodinataına göe ede edien potansiye eneji denkemi, 1, z1, (3) Lastik sönümeme katsayıaı c 1, ve c 1, ihma ediise yayı ve yaysız kütenin geneeştiimiş koodinataına göe ede edien dissipasyon eneji denkemi, Ed = 0.5 [ c ( z& - z& ) + c ( z& - z& ) ] (4) Denkem () ve (4) ün düşey geneeştiimiş hızaı [ z &,,z&,,z& 1,,z& 1, ] e göe ve denkem (3) ünde geneeştiimiş koodinata [z,, z,, z 1,, z 1, ] ye göe tüevi aındıktan sona ekte veien matise [Ek], [Ep] ve [Ed] ede edimişti. Eemanaı, bu matisein kısmi tüevei oan ve ekte veien Jacobian matisei sayesinde sistemin kütesi için [M], ön ve aka süspansiyon yay setikei için [K] ve ön ve aka sönümeyiciei için [C] matisei ede edimişti. Bu matise, aşağıdaki gibidi. Küte matisi [M],,, 1, Ep = 0.5 [ k ( z - z ) + k ( z - z ) + k z + k ],, 1, m i m i m + m 0 0 m i m i m - m m1, m 1, Sönümeme matisi [C], c 0 - c, 0 0 c, 0 - c, - c 0 c, c, 0 c, Rijitik matisi [K], k 0 - k, 0 0 k, 0 - k, - k 0 k + k, k 0 k + k, 1,, Lastik yayının ijitik matisi [K t ], k1, 0 0 k1, Yo uyaısı matisi [h(t)], 0 0 h h Tüm bu matise göz önüne aındığında, şeki (1) de göüen ön aksa doğu başvuma haeketi yapan taşıt sistemi için aşağıda denkem (5) de göüen matis omundaki dieansiye denkem sistemi ede edimişti. m i m i m + m 0 0 && z m i m i m - m && z && z 0 0 m1, 0 && z m 1, c 0 - c, 0 z& 0 c, 0 - c, z&, - c 0 c, 0 z& c, 0 c, z& 1, = k 0 h k h 0 k1, h (Im) k1, h k 0 - k, 0 z 0 k, 0 - k, z - k 0 k+ k, 0 z 0 - k, 0 k1, + k, z = (Im) (5) Denkem (5) de göüen matis omundaki dieansiye denkem sistemini ouştuan haeket denkemei aşağıdaki gibidi. Ön süspansiyonun üstündeki yayı küte için haeket denkemi, i m + && z + c ( z& - z& ) + k ( z - z1, ) i + m - z &&, = 0 (6) Aka süspansiyon üstündeki yayı küte için haeket denkemi, m i m + && z, + c, ( z&, - z& 1, ) + k, ( z, - z1, ) m i + m (7) - z && = 0 Ön aksta yaysız küte için haeket denkemi,, 1, +, 1, Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3,
4 H. Köyü ve A. Çına Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi m && z - c ( z& - z& ) - k ( z - z ) + k z = k h () t Aka aksta yaysız küte için haeket denkemi, (8) m1, && z1, - c, ( z&, - z& 1, ) - k, ( z, - z1, ) + k1, z1, = k h ( t) (9) 1, Denkem (6) ve (7) de köşei paantezde veien ik ve son teime inceendiğinde taşıt gövdesinin tüm haeketeinin, ön ve aka aks üzeine indigendiği göümektedi. Liteatüde; taşıt gövdesinin başvuma haeketi, moment dengesinden ede edimesine kaşın bu çaışmada ön ve aka aks üzeine indigenmiş yayı küteye etkiyen kuvvetein dengesinden ede edimişti. Böyece; taşıtın başvuma haeketi, ön ve aka yayı küteein düşey ye değiştimesi ie beienmişti. Taşıt gövdesinin tüm kütesi eşit oanada ön ve aka aks üzeine indigendiğinde ve ağıık mekezi aks aaığının ota noktasında oduğunda saınım mekezeinin konumu, ön ve aka süspansiyon yay setikei ie değiştiiebimişti..1 Dieansiye denkem sisteminin çözümü (The soution o dieentia equation system) Dinamik denkemein giiş onksiyonaı oan yo püüzüüğü (h ) ve (h ), sinüs sinyai ie iade edidiğinden denkemin gene çözümei de aşağıdaki gibi hamonik onksiyona oacaktı. Bu onksiyona, kompeks şekide iade edidiğinden bi sana bi de geçe bieşeni vadı [15]. Fonksiyonaın matematikse iadeei aşağıdaki gibidi. z, = z, (g) + z, (s) = A sinωt + B cosωt (10) z, = z, (g) + z, (s) = C sinωt + D cosωt (11) z 1, = z 1, (g) + z 1, (s) = E sinω t + F cosω t (1) z 1, = z 1, (g) + z 1, (s) = G sinωt + H cosωt (13) Başvuma ve kakım haeketinin ivme genikeini hesapamak için yukada veien hamonik onksiyonaın geçe ve sana genikeinin beienmesi geekidi. Bunun için denkem (14) de göüen ve [M], [C], [K], [K t ] ve [h(t)] matiseinden ouşan çözüm matisi kuanımaktadı [16, 17]. z( g) [ ]- [ ] - [ ] z, g ( ) K ω M ω C z ( g) z 1, g ( ) = z ( s) z 0 0 0, s ( ) - ω [ C ] [ K ]- ω [ M ] z k1, 0 h () s ( s) z 0 k1, h s () 1, s ( ) X Z Y h (14) Çözüm matisi ie denkem (15) gibi cebik bi denkem ede edieek taşıt gövdesi ve aks küteein düşey ye değiştime genikei, tüm bieşeneiye hesapanmaktadı. Z = X -1 Y h (15) 3. BAŞVURMA VE KALKIM İVME GENLİKLERİ (THE AMPLITUDES OF PITCH AND BOUNCE ACCELERATION) Bu çaışmada kuanıan modede taşıt gövdesi öne doğu başvuma haeketi yapmaktadı. Buna göe taşıt gövdesinin ağıık mekezinin düşey ye değiştimesi, aşağıda denkem (16) da göüdüğü gibi ön ve aka yayı kütenin düşey ye değiştimeei ie iade edimektedi. z + z, z= = z + ( z, z, ) (16) z, = A sinωt + B cosωt ve z, = C sinω t + D cosωt ye değiştimeei göz önüne aındığında denkem (16) aşağıdaki gibi ou. z= z + ( z, - z, ) (17) = Asin ωt + Bcos ωt + ( Csin ωt + Dcos ωt - Asin ωt + Bcos ωt ) Denkem (17) ye göe sinüsü (sana) ve kosinüsü (geçe) bieşene ayı ayı göz önüne aınısa kakım haeketini tanımayan ağıık mekezinin düşey ye değiştime bieşenei de aşağıdaki gibidi. zs = Asin ωt + ( Csin ωt - Asin ωt) (18) zg = Bcos ωt + ( Dcos ωt - Bcos ωt ) (19) Bu bieşenee göe kakım haeketinin geniği aşağıdaki gibidi. A+ ( C A) + B+ ( D B) z= zs + z g = (0) Böyece, kakım haeketinin ekans boyutundaki ivme geniği, denkem (1) ie iade edimektedi. A+ ( C A) + B+ ( D B) && z = ω (1) Aynı şekide başvuma haeketi anında taşıt gövdesinin açısa ye değiştimesi (φ) de ön ve aka yayı kütenin düşey ye değiştimeeine göe aşağıdaki gibi hesapanmaktadı. z, z, ϕ = () z, = Asinωt + Bcosωt ve z, = C sinωt + D cosωt ye değiştimeei göz önüne aındığında denkem () aşağıdaki gibi ou. z, - z, ( Csinωt+ Dcos ωt ) - ( Asinωt+ Bcos ωt) (3) ϕ = = Böyece, başvuma haeketinin ekans boyutundaki ivme geniği de denkem (4) ie iade edii. 90 Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3, 007
5 Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi H. Köyü ve A. Çına ( C- A) ( D B) && ϕ = ω + 4. SİMÜLASYON (SIMULATION) (4) Bu çaışmada, başvuma ve kakım haeketeine ait ivme genikeinin ekans cevapaını ede etmek için denkem (1) ve (4) de veien ivme genikeinin, yo uyaı geniğine oanını iade eden büyütme onksiyonaı [ z&& ] ve [ ϕ&& ] kuanımıştı. Büyütme b b onksiyonu sayesinde genikein, taşıt hızı ve aks aaığı değişimine göe yo uyaısına ne kada bağımı oduğu tespit ediebimişti. Aynı zamanda, taşıt gövdesinin ne kada sıkıka ve hangi uyaı ekansaında başvuma ve kakım haeketi yaptığını beiemek için az açısının yo uyaı ekansına göe değişimini gösteen gaike göz önüne aınmıştı. Bu gaikedeki değişime göe taşıt gövdesinin başvuma ve kakım haeketei aşağıdaki koşua ie beienmişti. Ön ve aka aksa geen uyaıa, az hainde yani az açıaı 0, π, 4π v.s. oduğunda taşıt gövdesinin ağıık mekezi sadece tam bi öteeme yani kakım haeketi yapacaktı [5,14]. Ön ve aka aksa geen uyaıa, kaşı azda oduğunda yani az açıaı π, 3π, 5π v.s. ise gövde sadece ağıık mekezi etaında tam bi başvuma haeketi yapacaktı [5,14]. Faz açısı gaiğinde eğimin azaması, ön ve aka aksa geen uyaıa aasındaki az akının azadığını beiemektedi [5]. Faz açısı gaiğinde eğimin atması, ön ve aka aksa geen uyaıa aasındaki az akının attığını beiemektedi [5]. Taşıt modeinin simüasyonunda kuanıan teme taşıt paameteei, tabo (1) de ve bu paametee ie hesapanan taşıt titeşim değeei tabo () de veimişti. Simüasyonu yapıan taşıt modeinde, aynı ve akı değedeki ön ve aka süspansiyon yay setikei sayesinde saınım mekezi konumaı değiştiimişti. Yay setikei, ön ve aka yayı küte doğa ekansaı ie beienmişti. Yay setiğinin, yayı kütenin doğa ekansından nası ede edidiği tabo () de göümektedi. Beienen yay setikeine ve doğa ekansaa göe akı saınım mekezi konumaı aşağıdaki koşua ie ede edimişti. 1. Ön ve aka süspansiyon yay setiği aynı yani, (k, = k, ) veya ( n, = n, ) oduğunda başvuma saınım mekezi, ağıık mekezine doğu ve kakım saınım mekezi de sonsuza doğu haeket etmektedi. Bu duumda başvuma ve kakım haeketei bibiini etkiememektedi [11].. Ön süspansiyon yayı aka süspansiyon yayından daha set yani, (k, > k, ) veya ( n, > n, ) oduğunda başvuma saınım mekezi, aka aksın önüne doğu ve kakım saınım mekezi de ön aksın önüne doğu haeket etmektedi. Bu duumda başvuma ve kakım haeketei bibiini etkiemektedi [11]. 3. Aka süspansiyon yayı, ön süspansiyon yayından daha set yani, (k, < k, ) veya ( n, < n, ) ise, başvuma saınım mekezi, ön aksın önüne doğu ve kakım saınım mekezi de aka aksın akasına doğu haeket etmektedi. Bu duumda da başvuma ve kakım haeketei bibiini etkiemektedi [11]. Saınım mekezindeki bu değişimein süüş konouna etkiei, aks üzeinde ve aks aaığının otasındaki noktaa için inceenmişti. Bu noktaadaki ivme genikei, aşağıdaki gibi ede edimişti. Başvuma haeketinin aks üzeindeki cevabı, taşıt gövdesi öne doğu başvuma haeketi yaptığından z, nin ivme geniğinin (/) ie çapıması ie aşağıdaki gibi ede edimektedi [17]. && z, ( ) = ( ω A + B )( ) (5) Başvuma haeketinin aks aaığının otasındaki cevabı denkem (4) ie ede edimektedi. Kakım haeketinin aks üzeindeki cevabı, z, nin ivme geniği ie aşağıdaki gibi ede edimektedi [17]. && z = ω A + B (6) Kakım haeketinin aks aaığının otasındaki cevabı, z, nin ivme geniğinin (/) ie çapıması ie ede edimektedi [17]. && z (7) ( ) = ω A + B ( ) Bu denkemeden ede edien aks otasındaki ivme genikeinin ekans cevapaı da büyütme onksiyonaı ie ede edimişti. Bu yöntem ie ede edien aks otasındaki ivme genikei, dantea eğiei şekindedi. Dantea eğieinin tepe noktası o ekans aaığı için maksimum ivme geniğini iade etmektedi. Dantea eğieinin tepe sayıaı attıkça taşıt gövdesi, başvuma ve kakım haeketini daha sıkıka yapmaktadı. Dantea eğieinin tabanaının sıı çizgisine oan mesaesi, taşıt gövdesinin başvuma ie kakım haeketi aasındaki etkieşimi beiemektedi. Ayıca, aks otasındaki ivme geniği eğieinin aks üzeindeki ivme eğieinin atında kaması, süüş konounda bi iyieşmenin oabieceğini ve bu eğie aasındaki mesaenin atması da daha iyi bi süüş konounun ede ediebieceğini göstemektedi. Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3,
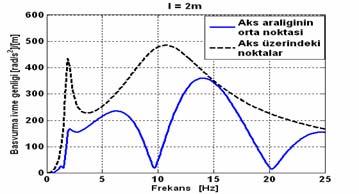
6 H. Köyü ve A. Çına Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi Tabo 1. Teme taşıt paameteei (Basic vehice paametes) m, Ön aks üstündeki yayı küte 9 kg m, Aka aks üstündeki yayı küe 9 kg m 1, Yaysız ön aks kütesi 4 kg m 1, Yaysız aka aks kütesi 4 kg n, Ön aks üzeindeki yayı kütenin doğa ekans aaığı 1.4 Hz n, Aka aks üzeindeki yayı kütenin doğa ekans aaığı 1.4 Hz 1n, Ön aks üzeindeki aks (yaysız) kütesinin doğa ekansı 11 Hz 1n, Aka aks üzeindeki aks (yaysız) kütesinin doğa ekansı 11 Hz D, Ön aks boyutsuz sönümeme oanı 0.5 D, Aka aks boyutsuz sönümeme oanı 0.5 Aks aaığı.6 m Ağıık mekezinin ön aksa oan mesaesi 1.48 m Ağıık mekezinin aka aksa oan mesaesi 1.48 m i Yayı kütenin ağıık mekezi etaındaki jiasyon yaıçapı 1.4 m v Taşıt hızı aaığı 10-0 m/sn Tabo. Teme taşıt paameteeinden hesapanan paametee (The paametes computed om basic vehice paametes) Yay katsayısı k Sönümeme katsayısı c Ön aks üstündeki yayı kütenin açısa doğa ekansı ω n, = π n, Aka aks üstündeki yayı kütenin açısa doğa ekansı ω n, = π n, Ön aks kütesinin açısa doğa ekansı ω 1n, = π 1n, Aka aks kütesinin açısa doğa ekansı ω 1n, = π 1n, Ön süspansiyon yay setiği k, = ω n, m, Aka süspansiyon yay setiği k, = ω n, m, Ön astik yay setiği k 1, = m 1, ω 1n, k, Aka astik yay setiği k 1, = m 1, ω 1n, k, Ön aks amotisöünün sönümeme katsayısı c, = k, D, / ω n, Aka aks amotisöünün sönümeme katsayısı c, = k, D, / ω n, Aksa üzeindeki topam yayı küte m = m, + m, Ön aksın ağıık mekezine mesaesi = ( m, ) / (m ) Aka aksın ağıık mekezine mesaesi = ( m, ) / (m ) 5. SİMÜLASYON SONUÇLARI (SIMULATION RESULTS) 5.1 Fakı taşıt hızaına göe ede edien sonuça (The esuts obtained with espect to dieent vehice speeds) Şeki de akı taşıt hızaında saınım mekezi konum değişiminin, yo uyaısı ekansına göe ivme genikeine ait ekans cevapaında meydana getidiği değişime göümektedi. Şeki deki tüm gaikede taşıt hızı attıkça dantea şekindeki eğiein tepe sayısı azamaktadı. Bu, taşıt hızı attıkça az akının azaması sonucunda taşıt gövdesinin daha az başvuma ve kakım haeketi yaptığını göstemektedi. Ayıca, tüm gaikede aks üstündeki noktaaın ivme geniğini beieyen eğiede iki ezonans tepesi buunmaktadı. Bunadan düşük yo uyaısı ekansında otaya çıkan ezonans tepesi, aks üzeindeki yayı kütenin doğa ekansını, yüksek uyaı ekansındaki ise aks kütesi (yaysız küte) nin doğa ekansını göstemektedi. Şeki (a) da göüdüğü gibi he iki süspansiyon yayının aynı setikte oması ie ede edien saınım mekezi konum değişimi sayesinde tüm yo uyaı ekansaında aks üstündeki noktaaın ivme geniği, aks aaığının otasındakieden daha büyük oduğundan süüş konounda iyieşme ede ediebii. Şeki (b) de göüdüğü gibi taşıt gövdesi doğa ekansına yakın uyaı ekansaında aks üzeindeki noktaada hem başvuma hem de kakım haeketinde aks üzeindeki süüş konou en kötü duumdadı. Ayıca, yo uyaı ekansı aks doğa ekansına yakaştıkça taşıtın ota noktasındaki ivme geniği, aks üzeindekieden daha büyüktü. Bu sonuç, bu ekansada süüş konoundan bi iyieşme ede ediemeyeceğini göstemektedi. Sonuç oaak, taşıt gövdesi başvuma ve kakım haeketi yapaken başvuma saınım mekezi aka aksa, kakım mekezi de ön aksa doğu haekete zoandıkça süüş konou kötüeşebii. Şeki (c) de ise uyaı ekansı, taşıt gövdesi doğa ekansına yakaştıkça ota noktadaki başvuma ivme genikeinin, aks üstündekiee göe daha yüksek değede oduğu göümektedi. Bu nedene 9 Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3, 007

 (b) (c) Şeki.")


, b. n, > n, için ivme")
 (b.")
, c. n, < n, için ivme 1.")
")

7 Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi H. Köyü ve A. Çına (a) (b) (c) Şeki. a. n, = n, için ivme genikeinin ekans cevapaı ( n, = n, = 1.4 Hz) (a. The equency esponses o body pitch and bounce acceeation o n, = n, ), b. n, > n, için ivme genikeinin ekans cevapaı ( n, = Hz, n, = 1.4 Hz) (b. The equency esponses o body pitch and bounce acceeation o n, > n, ), c. n, < n, için ivme genikeinin ekans cevapaı ( n, = 1.4 Hz n, = Hz) (c. The equency esponses o body pitch and bounce acceeation o n, < n, ) Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3,
8 H. Köyü ve A. Çına Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi bu saınım mekezi konum değişimi ie bu ekans aaığında süüş konou kötüeşmektedi. Buna kaşın, uyaı ekansı attıkça hem kakım hem de başvuma ivme genikei en düşük değeindedi. Bu sonuça ie taşıt gövdesi ön aksa doğu başvuma haeketi yapaken aynı aks aaığı için taşıt hızı attıkça yük tanseinin süüş konounu kötüeştimemesi amacıya şeki (a) ve (c) kaşıaştııdığında; Yo uyaı ekansı, yayı küte doğa ekansına yakaştığında başvuma saınım mekezinin aks otasına, kakım saınım mekezinin de sonsuza doğu haeket ettiimesi geektiği, Yo uyaı ekansı, yaysız küte doğa ekansına yakaştıkça başvuma saınım mekezinin ön aksa, kakım saınım mekezinin de aka aksa doğu haeket ettiimesi geektiği beienmişti. Şeki (a) ve (c) başvuma ve kakım haeketi aasındaki etkieşimi açısından inceendiğinde, taşıt gövdesi ezonansa mauz kadığında süüş konounun kötüeşmemesi için, başvuma ve kakım haeketi bibiini daha az etkiemei, aks kütesi ezonansa mauz kadığında ise daha aza etkiemesi geektiği tespit edimişti. Aynı şekide başvuma genikeinin azaması için kakım ivme genikeinin atması geektiği göümüştü. Böyece, taşıt, yo püüzüüğünü başvuma haeketinden daha çok kakım haeketi ie kaşıayaak yük tanseinin süüş konounu kötüeştiici etkieini azatmaktadı. 5.. Fakı aks aaıkaına göe ede edien sonuça (The esuts obtained with espect to dieent wheebases) Taşıt dinamiği iteatüünde, aks aaığı; ön ve aka tekeek temas mekezei aasındaki mesae oaak tanımanmaktadı. Şeki 3 de akı aks aaıkaında başvuma haeketi anında saınım mekezi konum değişiminin, yo uyaısı ekansına göe ivme genikeinin ekans cevapaında meydana getidiği değişime göümektedi. Şeki 3 deki tüm gaikede, aks aaığı attıkça dantea şekindeki eğiein tepe sayısı atmaktadı. Bu sonuç, ön ve aka aksaa geen uyaıa aasındaki az akının atması ie taşıt gövdesinin daha çok sıkıka başvuma ve kakım haeketi yaptığını göstemektedi. Ayıca, şeki deki tüm gaikede oduğu gibi şeki 3 deki tüm gaikede de aks üstündeki noktaaın ivme geniğini beieyen eğiede iki ezonans tepesi buunmaktadı. Şeki 3(a) da, tüm yo uyaı ekansaında aks üstündeki noktaaın ivme geniği, aks aaığının otasındakieden daha büyük oduğu için bu saınım mekezi konumu ie süüş konounda iyieşme ede ediebieceği göümektedi. Şeki 3(b) de ise yo uyaı ekansı aks doğa ekansına yakaştıkça taşıtın ota noktasındaki ivme geniği, aks üzeindekieden daha büyük oduğu ve bunun sonucunda bu saınım mekezi konumu ie geniş ekans aaıkaında süüş konoundan bi iyieşme ede ediemeyeceği göümektedi. Şeki 3(c) de ise yo uyaı ekansı, taşıt gövdesi doğa ekansına yakaştıkça aks aaığının otasındaki başvuma ivme genikeinin, aks üstündekiee göe daha yüksek değede oduğu göümektedi. Bu nedene bu saınım mekezi nedeniye bu ekans aaığında süüş konounda düzeme omayabii. Buna kaşın, yo uyaı ekansı, aks ekansına yakaştıkça aks otasındaki ivme geniği eğiei aks üzeindekieden daha aşağıda oması nedeniye bu ekans aaığında da süüş konou iyieştiiebii. Bu ekans aaığında en düşük başvuma ivme geniği de bu saınım mekezi haeketi sayesinde ede edimişti. Bu sonuça ie taşıt gövdesi ön aksa doğu başvuma haeketi yapaken aynı taşıt hızında aks aaığı attıkça yük tanseinin süüş konounu kötüeştimemesi amacıya şeki 3(a) ve (c) kaşıaştııdığında; Yo uyaı ekansı, yayı küte doğa ekansına yakaştığında başvuma saınım mekezinin aks otasına, kakım saınım mekezinin de sonsuza doğu haeket ettiimesi geektiği, Yo uyaı ekansı, yaysız küte doğa ekansına yakaştıkça başvuma saınım mekezinin ön aksa, kakım saınım mekezinin de aka aksa doğu haeket ettiimesi geektiği beienmişti. Şeki 3(a) ve (c) başvuma ve kakım haeketi aasındaki etkieşim açısından inceendiğinde, taşıt gövdesi ezonansa mauz kadığında süüş konounun kötüeşmemesi için başvuma ve kakım haeketi bibiini daha az etkiemei, aks kütesi ezonansa mauz kadığında ise daha aza etkiemesi geektiği tespit edimişti. Sonuç oaak; şeki () ve (3) de ede edien sonuça kaşıaştııdığında hem taşıt hızandıkça hem de aks aaığı attıkça yük tanseinin süüş konou üzeindeki etkieini azatacak başvuma ve kakım saınım mekezi haeketei aynı yöndedi. 6. SONUÇLAR (CONCLUSIONS) Bu çaışmada, yük dağıımının süüş konou üzeindeki etkieini azatacak öçütü beiemek için, başvuma haeketi anında saınım mekezei, ağıık mekezine göe akı noktaaa haeket ettiimişti. Bunun sonucunda, süüş konounu düzetecek saınım mekezi haeket yönei beienmişti. Beienen bu mekezein başvuma haeketi anında süüş konounu iyieştiebiecek öçüte (kitee) oabieceği tespit edimişti. Bu öçüte, beii yo kaakteistiği için yayı ve yaysız kütenin doğa ekansına göe aşağıdaki gibi beienmişti. 94 Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3, 007


 (b) (c) Şeki 3. a.")



 (b.")
, c.")
 (c.")

9 Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi H. Köyü ve A. Çına (a) (b) (c) Şeki 3. a. n, = n, için ivme genikeinin ekans cevapaı ( n, = n, = 1.4 Hz) (a. The equency esponses o body pitch and bounce acceeation o n, = n,, b. n, > n, için ivme genikeinin ekans cevapaı ( n, = Hz, n, = 1.4 Hz) (b.the equency esponses o body pitch and bounce acceeation o n, > n, ), c. n, < n, için ivme genikeinin ekans cevapaı ( n, = 1.4 Hz n, = Hz) (c.the equency esponses o body pitch and bounce acceeation o n, < n, ) Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3,
10 H. Köyü ve A. Çına Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi Yo uyaı ekansı, yayı küte doğa ekansına yakaştıkça başvuma saınım mekezi aks otasına, kakım saınım mekezi de sonsuza doğu haeket ettiimei, Yo uyaı ekansı, aks kütesi (yaysız küte) doğa ekansına yakaştıkça da başvuma saınım mekezi ön aksa, kakım saınım mekezi de aka aksa doğu haeket ettiimeidi. Pasi süspansiyonada başvuma haeketi anında bu saınım mekezi haeketeini veebiecek yay katsayısı, taşıt kütesi, aks kütesi ve amotisö sönümeme katsayısı gibi süspansiyon özeikei ie süüş konounun iyieşebieceği tespit edimişti. Bu süspansiyon özeikeinin, sadece beii yo kaakteistiği için baskın ekans bieşeneine göe beienebieceği göümüştü. Ede edien süspansiyon özeikei sayesinde süüş konounu iyieştien etkenein, başvuma ve kakım haeketei aasındaki etkieşimin değişmesi ve yodan geen uyaıaın başvuma ivme geniğinden daha yüksek oan kakım ivme genikei ie kaşıanması oduğu beienmişti. Aynı zamanda, ağıık mekezinin konumu ve jiasyon yaıçapı gibi taşıt özeikei ie saınım mekezi, istenien noktaaa haeket ettiiebii. Ancak, yo uyaısına göe değişim gösteememektedi. Bu nedene, beii yo kaakteistiği için süüş konounu düzetebiecek öçütün, süspansiyon özeikei ie ede ediebieceği göümüştü. SEMBOLLER (LIST OF SYMBOLS) z 1, z 1, z, z, Ön aks kütesinin düşey ye değiştimesi Aka aks kütesinin düşey ye değiştimesi Ön aks üzeindeki yayı kütenin düşey ye değiştimesi Aka aks üzeindeki yayı kütenin düşey ye değiştimesi At indise (Subscipts) Ön Aka 1 Yaysız küte Yayı küte KAYNAKLAR (REFERENCES) 1. Shap, R,S., Wheebase Fiteing and Automobie Suspension Tuning o Minimising Motions in Pitch, IMechE Pat D Automobie Engineeing, 16, , 00.. Sun, T., Zang, Y. ve Baak, P., 4-DOF Vehice Mode, SAE Pape, , Ebeheiy, E.M., Kanop, D.C., EAaby, M.E. ve Abdeaau, A.M., Advanced Gound Vehice Suspension Systems A Cassiied Bibiogaphy, Vehice System Dynamics, 4, 31-58, Campos, J., Davis, F., Lewis, F.L., Ikenaga, S., Scuy, S. ve Evans, M., Active Suspension Conto o Gound Vehice Heave and Pitch Motions, Poceedings o the 7th Mediteanen Coneence on Conto and Automation, 33, Ezi, A.I., Cadde ve Ray Taşıtaı Titeşimi Des Notaı, İTÜ Makine Fakütesi, İstanbu, Miiken, F.W. ve Miiken, D.L., Chasis Design Pincipe and Anaysis, SAE, USA Coa, D.A. ve King, R.P., Oey s Fat Ride (Revisited), Vehice System Dynamics Suppement, 33, , Hovat, D., Suvey o Advanced Suspension Deveopments and Reated Optima Conto Appications, Automotica, 33, 10, , Baak, P., Magic Numbes in Design o Suspensions o Passenge Cas, SAE Pape, 91191, Wong, J.Y., Theoy o Gound Vehices, John Wiey&Sons, New Yok, A.B.D, Giespie, T.D., Fundamentas o Vehice Dynamics, SAE, USA, Genta, G., Moto Vehice Dynamics Mathematica Modeing, Wod Scientiic, USA, Dixon, J.C., Ties, Suspension and Handing, SAE, USA, Smith, M.C. ve Wake, G.W., Inteconnected Vehice Suspension, IMechE Pat D Automobie Engineeing, 19, , Güney, A., Taşıtada Titeşim ve Güütü Des Notaı, İTÜ Makina Fakütesi, İstanbu, Ghosh, M.K. ve Dinavahi, R., Vibation Anaysis o a Vehice System suppoted on a Dampe-Contoed Vaiabe-Sping Stiness Suspension, IMechE Pat D Automobie Engineeing, 19, , Mitschke, M., Dynamik De Katahzeuge Band B: Schwingungen, Spinge - Veag, Bein, Gemany, The Mathwoks Inc., Matab 7.0 Use Guide, The Mathwoks Inc., USA, Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3, 007
11 H. Köyü ve A. Çına Taşıtada Başvuma Haeketi Anında Saınım Mekezi Konum Değişiminin Süüş Konouna Etkisinin Anaizi EK (APPENDIX) 1. Sistemin kinetik enejisi için jacobian matisi (J Ek ) (D : Kısmi tüev) Kinetik eneji denkeminin geneeştiimiş hızaa göe tüevi aşağıdaki gibidi. Ek Ek Ek Ek = Ek, = Ek, = Ek, = Ek z& z& z& z&, 1,, 1, Ek, bu tüeveden ouşan bi matis ise Jacobian matisi (J Ek ) aşağıdaki gibidi. Ek, Ek, Ek = Ek Ek 1, DEk = J =. Sistemin potansiye enejisi için Jacobian matisi (J Ep ) (D : Kısmi tüev) Ek Ek Ek Ek Ek z& z& z& z& Ek Ek Ek Ek z& z& z& z& Ek Ek Ek Ek z& z& z& z& Ek1, Ek1, Ek Ek z& z&, z& z& 1,, 1,,,,,, 1,, 1, 1, 1, Potansiye eneji denkeminin geneeştiimiş düşey ye değiştimee göe tüevi aşağıdaki gibidi. Ep Ep Ep Ep = Ep, = Ep, = Ep, = Ep z z z z, 1,, 1, Ep, bu tüeveden ouşan bi matis ise jacobian matisi (J Ep ) aşağıdaki gibidi. Ep, Ep, Ep = Ep Ep 1, DEp= J 3. Sistemin sönüm (dissipasyon) enejisi için Jacobian matisi (J Ed ) (D : Kısmi tüev) Ep = Ep Ep Ep Ep, z z, z z1, Ep Ep Ep Ep z z, z z1, Ep Ep Ep Ep1, z z, z z1, Ep1, Ep1, Ep1, Ep1, z z, z1, z1,,,,, Sönüm eneji denkeminin geneeştiimiş hızaa göe tüevi aşağıdaki gibidi. Ed Ed Ed Ed = Ed, = Ed, = Ed, = Ed z& z& z& z&, 1,, 1, Ed, bu tüeveden ouşan bi matis ise jacobian matisi J Ed aşağıdaki gibidi. Ed, Ed, Ed = Ed Ed 1, DEd = J Ed = Ed Ed Ed Ed z& z& z& z& Ed Ed Ed Ed z& z& z& z& Ed Ed Ed Ed z& z& z& z& Ed1, Ed1, Ed1, Ed1, z& z&, z& z& 1,, 1,,,,,, 1,, 1, 97 Gazi Üniv. Müh. Mim. Fak. De. Cit, No 3, 007
12
TEKNOLOJĐK ARAŞTIRMALAR
 www.teknoojikaastimaa.com e-issn:134-4141 Makine Teknoojiei Eektonik Degisi 8 (3) 1-19 TEKNOLOJĐK ARAŞTIRMALAR Makae Başvuma Haeketi Anında Ön ve Aka Süspansiyon Özeikeinin Süüş Konouna Etkisinin Taşıt
www.teknoojikaastimaa.com e-issn:134-4141 Makine Teknoojiei Eektonik Degisi 8 (3) 1-19 TEKNOLOJĐK ARAŞTIRMALAR Makae Başvuma Haeketi Anında Ön ve Aka Süspansiyon Özeikeinin Süüş Konouna Etkisinin Taşıt
BASİT MAKİNELER. Kuvvet Kazancı. Basit Makinelerin Genel Özellikleri. Basit Makinelerde Verim
 BASİT MAİNELER Makine; dendiğinde, dişieden, mieden ve daa biçok aeketi paçadan ouşmuş büyük cisimei kadımaya, kımaya yaayan kamaşık bi yapı akımıza gei. Oysa bi işi yapaken daa az kas gücü kuanmak veya
BASİT MAİNELER Makine; dendiğinde, dişieden, mieden ve daa biçok aeketi paçadan ouşmuş büyük cisimei kadımaya, kımaya yaayan kamaşık bi yapı akımıza gei. Oysa bi işi yapaken daa az kas gücü kuanmak veya
5. Yatayla θ=37 açı yapacak şekilde bir cisim v 0 ilk hızı ile şekildeki gibi fırlatılıyor. x mesafesi kaç metredir.
 . Beii bi x mesafesini sabit hızı ie duun suda idip emek mi yoksa, u< hızı ie akan bi nehide idip emek mi daha faza zaman aı?. K e L şehieden aasındaki uzakık IKLI=64 km oup, kaşııkı oaak = km/saat e =6
. Beii bi x mesafesini sabit hızı ie duun suda idip emek mi yoksa, u< hızı ie akan bi nehide idip emek mi daha faza zaman aı?. K e L şehieden aasındaki uzakık IKLI=64 km oup, kaşııkı oaak = km/saat e =6
Sınav Süresi 60 dakikadır, artı 15 dakika giriş yapma süresi bulunmaktadır.
 Sınav Süesi 60 dakikadı, atı dakika giiş yapa süesi buunaktadı. Dikkat!! Cevapaın giiş dakikaaını sou çözek için kuanayın çünkü sınava katıan sayı yüksek oduğundan intenet işeeinde sıkıntı yaşanabii!!
Sınav Süesi 60 dakikadı, atı dakika giiş yapa süesi buunaktadı. Dikkat!! Cevapaın giiş dakikaaını sou çözek için kuanayın çünkü sınava katıan sayı yüksek oduğundan intenet işeeinde sıkıntı yaşanabii!!
h olan bir metal levha simetrik olarak yerleştirilirse yeni sığa
 1 ONDANATÖLE 1. He biinin aanı oan iki ietken paae paka aasındaki uzakık
1 ONDANATÖLE 1. He biinin aanı oan iki ietken paae paka aasındaki uzakık
GÜÇLENDİRME PERDELERİNDE BOŞLUKLARIN KAPASİTEYE OLAN ETKİSİ
 2. Türkiye Deprem Müendisiği ve Sismooji Konferansı 25-27 Eyü 213 MKÜ HATAY GÜÇLENDİRME PERDELERİNDE BOŞLUKLARIN KAPASİTEYE OLAN ETKİSİ ÖZET: K. Pençereci 1, S. Yıdırım 1, Y.İ. Tonguç 1 1 İnş. Yük. Mü.,Promer
2. Türkiye Deprem Müendisiği ve Sismooji Konferansı 25-27 Eyü 213 MKÜ HATAY GÜÇLENDİRME PERDELERİNDE BOŞLUKLARIN KAPASİTEYE OLAN ETKİSİ ÖZET: K. Pençereci 1, S. Yıdırım 1, Y.İ. Tonguç 1 1 İnş. Yük. Mü.,Promer
AKIŞKAN HAREKETĐNĐ YÖNETEN GENEL DENKLEMLER, TEMEL KAVRAMLAR
 AKIŞKAN HAREKETĐNĐ YÖNETEN GENEL DENKLEMLER, TEMEL KARAMLAR Bazı önemi kaama Konto hami Debi Haeketi takiben aınmış tüe Gene denkemein intega fomaı Gene denkemein difeansie fomaı Bazı teme kaama Akım çizgisi
AKIŞKAN HAREKETĐNĐ YÖNETEN GENEL DENKLEMLER, TEMEL KARAMLAR Bazı önemi kaama Konto hami Debi Haeketi takiben aınmış tüe Gene denkemein intega fomaı Gene denkemein difeansie fomaı Bazı teme kaama Akım çizgisi
GÖRÜŞ UZUNLUKLARI (Sight Distances)
") GÖRÜŞ UZUNLUKLARI (Sight Ditance) Göüş uzunuğu üücünün iei doğutuda göebidiği yo uzunuğudu. Yo Emniyeti ( güveniği ) ve Youn Kapaitei ( hız düşee youn kapaitei de düşecekti ) açıından önemi bi uzunuktu
GÖRÜŞ UZUNLUKLARI (Sight Ditance) Göüş uzunuğu üücünün iei doğutuda göebidiği yo uzunuğudu. Yo Emniyeti ( güveniği ) ve Youn Kapaitei ( hız düşee youn kapaitei de düşecekti ) açıından önemi bi uzunuktu
VİDEO KAMERA GEOMETRİSİ VE KALİBRASYONU
 ükie Uusa Fotogameti ve Uzaktan Agıama iiği VII. eknik Sempozumu (UFUA 3), 3-5 Maıs 3, KÜ, abzon. VİDEO KAMERA GEOMERİSİ VE KALİRASYONU M.S. emiz a, S. Küü b, S. Doğan a a Ondokuz Maıs Ünivesitesi Müh.
ükie Uusa Fotogameti ve Uzaktan Agıama iiği VII. eknik Sempozumu (UFUA 3), 3-5 Maıs 3, KÜ, abzon. VİDEO KAMERA GEOMERİSİ VE KALİRASYONU M.S. emiz a, S. Küü b, S. Doğan a a Ondokuz Maıs Ünivesitesi Müh.
Hazırlayan Arş. Grv. M. ERYÜREK
 7. BASĐ SARKAÇ ĐLE YERÇEKĐMĐ ĐVMESĐNĐN BULUNMASI AMAÇ Hazırayan Arş. Grv. M. ERYÜREK 1- Basit harmonik hareketerden biri oan sarkaç hareketini fizikse oarak inceemek, yerçekimi ivmesini basit sarkaç kuanarak
7. BASĐ SARKAÇ ĐLE YERÇEKĐMĐ ĐVMESĐNĐN BULUNMASI AMAÇ Hazırayan Arş. Grv. M. ERYÜREK 1- Basit harmonik hareketerden biri oan sarkaç hareketini fizikse oarak inceemek, yerçekimi ivmesini basit sarkaç kuanarak
BÖLÜM 2 KORUNUM DENKLEMLERİ
 BÖLÜM KORUNUM DENKLEMLERİ.-Uzayda sabit konumlu sonlu kontol hacmi.- Debi.3- Haeketi takiben alınmış tüev.4- üeklilik denklemi.5- Momentum denklemi.6- Eneji Denklemi.7- Denklemlein bilançosu Kounum Denklemlei
BÖLÜM KORUNUM DENKLEMLERİ.-Uzayda sabit konumlu sonlu kontol hacmi.- Debi.3- Haeketi takiben alınmış tüev.4- üeklilik denklemi.5- Momentum denklemi.6- Eneji Denklemi.7- Denklemlein bilançosu Kounum Denklemlei
DÜZ AYNALAR. 3 cm) düzlem ayna
 düzlem ayna") 45 DÜZ AYNALAR. Bi düzem aynanın noktasına 45 ik açı ie geen ışık ekandaki A noktasına uaşmakta oup BA=0 cm di. Ayna noktası etaında saat yönünün tesine 7,5 döndüüüse ışık ekanda başka bi noktaya uaşmaktadı.
45 DÜZ AYNALAR. Bi düzem aynanın noktasına 45 ik açı ie geen ışık ekandaki A noktasına uaşmakta oup BA=0 cm di. Ayna noktası etaında saat yönünün tesine 7,5 döndüüüse ışık ekanda başka bi noktaya uaşmaktadı.
AKTİF SÜSPANSİYONLU ÇEYREK TAŞIT MODELİNİN İVME GERİBESLEMELİ KONTROLÜ
 AKTİF SÜSPANSİYONLU ÇEYREK TAŞIT MODELİNİN İVME GERİBESLEMELİ KONTROLÜ Hakan KÖYLÜ 1 H.Metin ERTUNÇ 1 Kocaeli Üniversitesi, Teknik Eğitim Fakültesi, Otomotiv Öğretmenliği, 41100 Kocaeli Kocaeli Üniversitesi,
AKTİF SÜSPANSİYONLU ÇEYREK TAŞIT MODELİNİN İVME GERİBESLEMELİ KONTROLÜ Hakan KÖYLÜ 1 H.Metin ERTUNÇ 1 Kocaeli Üniversitesi, Teknik Eğitim Fakültesi, Otomotiv Öğretmenliği, 41100 Kocaeli Kocaeli Üniversitesi,
Ankara Üniversitesi Diş Hekimliği Fakültesi Ankara Aysuhan OZANSOY
 FİZ11 FİZİK Ankaa Üniesitesi Diş Hekimliği Fakültesi Ankaa Aysuhan OZANSOY Bölüm-III : Doğusal (Bi boyutta) Haeket 1. Ye değiştime e Haeketin Tanımı 1.1. 1 Mekanik Nedi? 1.. Refeans çeçeesi, Konum, Ye
FİZ11 FİZİK Ankaa Üniesitesi Diş Hekimliği Fakültesi Ankaa Aysuhan OZANSOY Bölüm-III : Doğusal (Bi boyutta) Haeket 1. Ye değiştime e Haeketin Tanımı 1.1. 1 Mekanik Nedi? 1.. Refeans çeçeesi, Konum, Ye
alan ne kadardır? ; 3 3
 - -. Doğa saıa kümeside f(k)=(k+) -k foksiou kuaaak k, k, k topamaı buuuz. ( + ) ( + )( + ) ( + ) 6. Topam fomüei kuaaak uzuuğu oa homoje bi çubuğu ucua göe ağıık mekezi buuuz.. Topam fomüei kuaaak uzuuğudaki
- -. Doğa saıa kümeside f(k)=(k+) -k foksiou kuaaak k, k, k topamaı buuuz. ( + ) ( + )( + ) ( + ) 6. Topam fomüei kuaaak uzuuğu oa homoje bi çubuğu ucua göe ağıık mekezi buuuz.. Topam fomüei kuaaak uzuuğudaki
Dönerek Öteleme Hareketi ve Açısal Momentum
 6 Döneek Ötelee Haeketi e Açısal Moentu Test 'in Çözülei.. R L P N yatay M Çebe üzeindeki bi noktanın yee göe hızı, o noktanın ekeze göe çizgisel hızı ile çebein ötelee hızının ektöel toplaına eşitti.
6 Döneek Ötelee Haeketi e Açısal Moentu Test 'in Çözülei.. R L P N yatay M Çebe üzeindeki bi noktanın yee göe hızı, o noktanın ekeze göe çizgisel hızı ile çebein ötelee hızının ektöel toplaına eşitti.
- 1 - D) t t. 2 ρ. oranı nedir? ise C) 4 D) 4
 t t. 2 ρ. oranı nedir? ise C) 4 D) 4") - - V. ULUSL İZİK OLİMPİYTI BİİNCİ ŞM SINVI -997 K t t H g B) t t L C). K e L şehieini bieştien doğu üzeinde aynı anda kaşı kaşıya e hızaı ie iki aaç haekete başıyo. İki aaç yoda kaşıaştıktan sona, K şehinden
- - V. ULUSL İZİK OLİMPİYTI BİİNCİ ŞM SINVI -997 K t t H g B) t t L C). K e L şehieini bieştien doğu üzeinde aynı anda kaşı kaşıya e hızaı ie iki aaç haekete başıyo. İki aaç yoda kaşıaştıktan sona, K şehinden
Parçacıkların Kinetiği Impuls-Momentum Yöntemi: Çarpışma
 Paçacıklaın Kinetiği Impuls-Momentum Yöntemi: Çapışma İki kütle bibii ile kısa süe içeisinde büyük impulsif kuvvetlee yol açacak şekilde temas edese buna çapışma (impact) deni. Çapışma 1. Diekt mekezcil
Paçacıklaın Kinetiği Impuls-Momentum Yöntemi: Çapışma İki kütle bibii ile kısa süe içeisinde büyük impulsif kuvvetlee yol açacak şekilde temas edese buna çapışma (impact) deni. Çapışma 1. Diekt mekezcil
TORK. τ = 2.6 4.sin30.2 + 2.cos60.4 = 12 4 + 4 = 12 N.m Çubuk ( ) yönde dönme hareketi yapar. τ K. τ = F 1. τ 1. τ 2. τ 3. τ 4. 1. 2.
 yönde dönme hareketi yapar. τ K. τ = F 1. τ 1. τ 2. τ 3. τ 4. 1. 2.") AIŞIRMAAR 8 BÖÜM R ÇÖZÜMER R cos N 4N 0 4sin0 N M 5d d N ve 4N luk kuv vet lein çu bu ğa dik bi le şen le i şekil de ki gi bi olu nok ta sı na gö e top lam tok; τ = 6 4sin0 + cos4 = 4 + 4 = Nm Çubuk yönde
AIŞIRMAAR 8 BÖÜM R ÇÖZÜMER R cos N 4N 0 4sin0 N M 5d d N ve 4N luk kuv vet lein çu bu ğa dik bi le şen le i şekil de ki gi bi olu nok ta sı na gö e top lam tok; τ = 6 4sin0 + cos4 = 4 + 4 = Nm Çubuk yönde
Bina Isıtmada Enerji Tüketiminin Optimum Kontrolü JAGA Araştırması
 Bina Isıtmada Tüketiminin Optimum Kontroü JAGA Araştırması İç mekan ısıtma ve soğutma sistemerinde enerji tüketiminin kontro edimesi ısınma ve ikimeme teorisinde daima önemi ro oynayan bir konu omuştur.
Bina Isıtmada Tüketiminin Optimum Kontroü JAGA Araştırması İç mekan ısıtma ve soğutma sistemerinde enerji tüketiminin kontro edimesi ısınma ve ikimeme teorisinde daima önemi ro oynayan bir konu omuştur.
45 h. v 2. g m K L M. m 2. f=0 f=0,2
 . Bi nehin A ianından su ie aynı yönde yüzen bi bot B ianına 3 saatte aıyo. Nehi taafından süükenen bi kütük ise iki ian aasındaki esafeyi saatte aıyo. Buna öe bot B ianından A ianına kaç saatte ide? u.
. Bi nehin A ianından su ie aynı yönde yüzen bi bot B ianına 3 saatte aıyo. Nehi taafından süükenen bi kütük ise iki ian aasındaki esafeyi saatte aıyo. Buna öe bot B ianından A ianına kaç saatte ide? u.
L diğer araca doğru uçmaktadır. Bu durumda iki araç yan yana gelinceye kadar güvercinden alınan yol x 1 olsun. İkinci bir durumda ise araçlar aynı
 . Şekideki ibi paae ayada buunan teneden X tenin uzunuğu, Y tenin uzunuğu y di. Y y Y y y 4 İki tenin ızaının oanı = 3 oaak eiiyo. İki tenin aka Şeki. Şeki. taaaı başanıçta Şeki. deki ibi aynı izada, beii
. Şekideki ibi paae ayada buunan teneden X tenin uzunuğu, Y tenin uzunuğu y di. Y y Y y y 4 İki tenin ızaının oanı = 3 oaak eiiyo. İki tenin aka Şeki. Şeki. taaaı başanıçta Şeki. deki ibi aynı izada, beii
ERKEN EMEKLİLİK VE AKTÜERYAL İNDİRGEME FAKTÖRLERİ
 T.C. SOSYAL GÜVENLİK KURUMU BAŞKANLIĞI SOSYAL GÜVENLİK UZMANLIK TEZİ TEZİN KONUSU ERKEN EMEKLİLİK VE AKTÜERYAL İNDİRGEME FAKTÖRLERİ HAZIRLAYAN Öme Ayhan AÇMAZ TEZ DANIŞMANI Sosya Güvenik Uzmanı Umut GÖÇMEZ
T.C. SOSYAL GÜVENLİK KURUMU BAŞKANLIĞI SOSYAL GÜVENLİK UZMANLIK TEZİ TEZİN KONUSU ERKEN EMEKLİLİK VE AKTÜERYAL İNDİRGEME FAKTÖRLERİ HAZIRLAYAN Öme Ayhan AÇMAZ TEZ DANIŞMANI Sosya Güvenik Uzmanı Umut GÖÇMEZ
Bölüm 6: Dairesel Hareket
 Bölüm 6: Daiesel Haeket Kaama Soulaı 1- Bi cismin süati değişmiyo ise hızındaki değişmeden bahsedilebili mi? - Hızı değişen bi cismin süati değişi mi? 3- Düzgün daiesel haekette cismin hızı değişi mi?
Bölüm 6: Daiesel Haeket Kaama Soulaı 1- Bi cismin süati değişmiyo ise hızındaki değişmeden bahsedilebili mi? - Hızı değişen bi cismin süati değişi mi? 3- Düzgün daiesel haekette cismin hızı değişi mi?
DÜŞEY AÇI VE EĞİK UZUNLUK ÖLÇÜLERİYLE ÜÇ BOYUTLU KOORDİNAT BELİRLEMENİN DOĞRULUĞU V. AKARSU. ± σ ölçüleriyle ile P noktasının üç boyutlu konum
 DÜŞEY ÇI VE EĞİK UUNLUK ÖLÇÜLERİYLE ÜÇ OYUTLU KOORDİNT ELİRLEMENİN DOĞRULUĞU V. KRSU ongudak Karaemas Üniversitesi ongudak Mesek Yüksekokuu, Teknik rogramar öümü, 6700 ongudak, vakarsu@mynet.com Özet ±
DÜŞEY ÇI VE EĞİK UUNLUK ÖLÇÜLERİYLE ÜÇ OYUTLU KOORDİNT ELİRLEMENİN DOĞRULUĞU V. KRSU ongudak Karaemas Üniversitesi ongudak Mesek Yüksekokuu, Teknik rogramar öümü, 6700 ongudak, vakarsu@mynet.com Özet ±
Boyutları 80x150 m olan sürtünmesiz eğik düzlemin en üst A noktasından eğik düzlem 80 m
 1 1. Hızı v=300 /s oan bi uçaktan dübün ie yeyüzü üzeinde haeketsiz oan bi cisi özenektedi. Beii bi anda dübünün ekseni dikey ie =53, 14 saniye sona β=37 açı yapaktadı. Uçağın uçtuğu sabit yüksekik H kaç
1 1. Hızı v=300 /s oan bi uçaktan dübün ie yeyüzü üzeinde haeketsiz oan bi cisi özenektedi. Beii bi anda dübünün ekseni dikey ie =53, 14 saniye sona β=37 açı yapaktadı. Uçağın uçtuğu sabit yüksekik H kaç
VİDALAR VE CIVATALAR. (DĐKKAT!! Buradaki p: Adım ve n: Ağız Sayısıdır) l = n p
 l = n p") VİDALA VE CIVAALA d : Miniu, inö yada diş dibi çapı (=oot) d : Otalaa, noinal çap yada böğü çapı (=ean) d : Maksiu, ajö çap, diş üstü çapı λ : Helis açısı p : Adı (p=pitch) l (hatve): Civatanın bi ta dönüşüne
VİDALA VE CIVAALA d : Miniu, inö yada diş dibi çapı (=oot) d : Otalaa, noinal çap yada böğü çapı (=ean) d : Maksiu, ajö çap, diş üstü çapı λ : Helis açısı p : Adı (p=pitch) l (hatve): Civatanın bi ta dönüşüne
FİZ101 FİZİK-I. Ankara Üniversitesi Fen Fakültesi Kimya Bölümü B Grubu 3. Bölüm (Doğrusal Hareket) Özet
 Özet") FİZ11 FİZİK-I Ankaa Üniesitesi Fen Fakültesi Kimya Bölümü B Gubu 3. Bölüm (Doğusal Haeket) Özet.1.14 Aysuhan Ozansoy Haeket Nedi? Mekanik; kuetlei e onlaın cisimle üzeine etkileini inceleyen fizik dalıdı
FİZ11 FİZİK-I Ankaa Üniesitesi Fen Fakültesi Kimya Bölümü B Gubu 3. Bölüm (Doğusal Haeket) Özet.1.14 Aysuhan Ozansoy Haeket Nedi? Mekanik; kuetlei e onlaın cisimle üzeine etkileini inceleyen fizik dalıdı
BÖLÜM 2 GAUSS KANUNU
 BÖLÜM GAUSS KANUNU.1. ELEKTRİK AKISI Elektik akısı, bi yüzeyden geçen elektik alan çizgileinin sayısının bi ölçüsüdü. Kapalı yüzey içinde net bi yük bulunduğunda, yüzeyden geçen alan çizgileinin net sayısı
BÖLÜM GAUSS KANUNU.1. ELEKTRİK AKISI Elektik akısı, bi yüzeyden geçen elektik alan çizgileinin sayısının bi ölçüsüdü. Kapalı yüzey içinde net bi yük bulunduğunda, yüzeyden geçen alan çizgileinin net sayısı
TıbbiHızİstatistik. Prof.Dr.İhsan Halifeoğlu
 TıbbiHızİstatistik ve Oran Prof.Dr.İhsan Haifeoğu Sağık Hizmeterinde Kuanıan Hız ve Oranar Çeşiti sağık sorunarının ve sağık hizmeterinin somut oarak görüebimesi ve değerendiriebimesi amacıya birçok sağık
TıbbiHızİstatistik ve Oran Prof.Dr.İhsan Haifeoğu Sağık Hizmeterinde Kuanıan Hız ve Oranar Çeşiti sağık sorunarının ve sağık hizmeterinin somut oarak görüebimesi ve değerendiriebimesi amacıya birçok sağık
KANAT YUNUSLAMASI VE DEĞİŞKEN KANATÇIK AÇILARI SIRASINDA OLUŞAN BÜYÜK GİRDAP OLUŞUMLARININ SİMÜLASYONU
 Kanat Yunuamaı e Değişken Kanatçık çıaı Sıaında Ouşan Büyük Gidap Ouşumaının Süayonu HVCILIK VE UZY TEKNOLOJİLERİ DERGİSİ OCK 2009 CİLT SYI (6-75) KNT YUNUSLMSI VE DEĞİŞKEN KNTÇIK ÇILRI SIRSIND OLUŞN BÜYÜK
Kanat Yunuamaı e Değişken Kanatçık çıaı Sıaında Ouşan Büyük Gidap Ouşumaının Süayonu HVCILIK VE UZY TEKNOLOJİLERİ DERGİSİ OCK 2009 CİLT SYI (6-75) KNT YUNUSLMSI VE DEĞİŞKEN KNTÇIK ÇILRI SIRSIND OLUŞN BÜYÜK
Apı Analizinde Optimizasyon Tekniklerinin Kullanılması
 kademik Biişim 008 Çanakkae Onekiz Mat Üniveitei, Çanakkae, 0 Ocak - 0 Şbat 008 pı naizinde Optimizayon Teknikeinin Kanımaı Mahmd Sami DÖVEN, Bak KYMK Dmpına Üniveitei, İnşaat Mühendiiği Böümü, Kütahya
kademik Biişim 008 Çanakkae Onekiz Mat Üniveitei, Çanakkae, 0 Ocak - 0 Şbat 008 pı naizinde Optimizayon Teknikeinin Kanımaı Mahmd Sami DÖVEN, Bak KYMK Dmpına Üniveitei, İnşaat Mühendiiği Böümü, Kütahya
ARAÇ YOL YÜKLERİNİN DIŞ DİKİZ AYNAYA ETKİLERİ VE DIŞ DİKİZ AYNA TİTREŞİM PARAMETRELERİNİN İNCELENMESİ
 OTEKON 4 7 Otomotiv Teknolojilei Kongesi 6 7 Mayıs 04, BURSA ARAÇ YOL YÜKLERİNİN DIŞ DİKİZ AYNAYA ETKİLERİ VE DIŞ DİKİZ AYNA TİTREŞİM PARAMETRELERİNİN İNCELENMESİ Basi ÇALIŞKAN *, İan KAMAŞ *, Tane KARSLIOĞLU
OTEKON 4 7 Otomotiv Teknolojilei Kongesi 6 7 Mayıs 04, BURSA ARAÇ YOL YÜKLERİNİN DIŞ DİKİZ AYNAYA ETKİLERİ VE DIŞ DİKİZ AYNA TİTREŞİM PARAMETRELERİNİN İNCELENMESİ Basi ÇALIŞKAN *, İan KAMAŞ *, Tane KARSLIOĞLU
Bölüm 11: Doğrusal Olmayan Optik Alıştırmalar
 Bölüm : Dğusal Olmayan Optik Alıştımala. (a Şiddeti I (W/m laak veilen ışığın, dğusal kıılma indisi n lan madde tamı içinde elektik alanının (E laak veilebileceğini gösteiniz. 7, 4 I E = (b I=,5 W/cm laze
Bölüm : Dğusal Olmayan Optik Alıştımala. (a Şiddeti I (W/m laak veilen ışığın, dğusal kıılma indisi n lan madde tamı içinde elektik alanının (E laak veilebileceğini gösteiniz. 7, 4 I E = (b I=,5 W/cm laze
Dairesel Hareket. Düzgün Dairesel Hareket
 Daiesel Haeket Daiesel haeket, sabit bi mekez etafında olan ve yaıçapın değişmediği haekete deni. Daiesel haekette hız vektöünün büyüklüğü değişmese de haeketin doğası geeği, yönü haeket boyunca süekli
Daiesel Haeket Daiesel haeket, sabit bi mekez etafında olan ve yaıçapın değişmediği haekete deni. Daiesel haekette hız vektöünün büyüklüğü değişmese de haeketin doğası geeği, yönü haeket boyunca süekli
İNSANSIZ KÜÇÜK BİR HAVA ARACININ (ZANKA-I) FARKLI TÜRBÜLANS ORTAMLARINDA MODEL ÖNGÖRÜLÜ KONTROLÜ VE GÜRBÜZLÜK TESTİ
 FARKLI TÜRBÜLANS ORTAMLARINDA MODEL ÖNGÖRÜLÜ KONTROLÜ VE GÜRBÜZLÜK TESTİ") HAVAILIK VE UZAY TEKNOLOJİLERİ DERGİSİ OAK 016 İLT 9 SAYI 1 (31-4) İNSANSIZ KÜÇÜK BİR HAVA ARAININ (ZANKA-I) FARKLI TÜRBÜLANS ORTAMLARINDA MODEL ÖNGÖRÜLÜ KONTROLÜ VE GÜRBÜZLÜK TESTİ Han ÇELİK * Tğ OKTAY
HAVAILIK VE UZAY TEKNOLOJİLERİ DERGİSİ OAK 016 İLT 9 SAYI 1 (31-4) İNSANSIZ KÜÇÜK BİR HAVA ARAININ (ZANKA-I) FARKLI TÜRBÜLANS ORTAMLARINDA MODEL ÖNGÖRÜLÜ KONTROLÜ VE GÜRBÜZLÜK TESTİ Han ÇELİK * Tğ OKTAY
Özet. Pr (1) 1.GİRİŞ 2. SİSTEM MODELİ. TESLAB - Telekomünikasyon ve Sinyal-İşleme Laboratuarı. Elektrik- Elektronik Mühendisliği Bölümü
 1.GİRİŞ 2. SİSTEM MODELİ. TESLAB - Telekomünikasyon ve Sinyal-İşleme Laboratuarı. Elektrik- Elektronik Mühendisliği Bölümü") PSAM-Tabanı LMMSE Kana Tahmini ie MRC ve EGC Uzay-Çeşitemesi Bireştiriminin Ricean Kanaar Üzerinde Kesinti Oasıığı ve Bit Hata Oranının İnceenmesi Jawad Ai Özgür Ertuğ TESLAB - Teekomünikasyon ve Sinya-İşeme
PSAM-Tabanı LMMSE Kana Tahmini ie MRC ve EGC Uzay-Çeşitemesi Bireştiriminin Ricean Kanaar Üzerinde Kesinti Oasıığı ve Bit Hata Oranının İnceenmesi Jawad Ai Özgür Ertuğ TESLAB - Teekomünikasyon ve Sinya-İşeme
BÖLÜM 5 İDEAL AKIŞKANLARDA MOMENTUMUN KORUNUMU
 BÖLÜM 5 İDEAL AKIŞKANLARDA MOMENTUMUN KORUNUMU Linee İmpuls-Momentum Denklemi Haeket halinde bulunan bi cismin hehangi bi andaki doğusal hızı, kütlesi m olsun. Eğe dt zaman aalığında cismin hızı değişiyosa,
BÖLÜM 5 İDEAL AKIŞKANLARDA MOMENTUMUN KORUNUMU Linee İmpuls-Momentum Denklemi Haeket halinde bulunan bi cismin hehangi bi andaki doğusal hızı, kütlesi m olsun. Eğe dt zaman aalığında cismin hızı değişiyosa,
Dört Çubuk Mekanizması Kullanarak Mikro Hava Aracı İçin Kanat Mekanizması Tasarımı
 Uusararası Katıımı 7. Makina Teorisi Sempoumu, İmir, 4-7 Hairan 5 Dört Çubuk Mekaniması Kuanarak Mikro Hava Aracı İçin Kanat Mekaniması Tasarımı A. İşbitirici * E. Atuğ İTÜ İTÜ İstanbu İstanbu Öet Kuşarın
Uusararası Katıımı 7. Makina Teorisi Sempoumu, İmir, 4-7 Hairan 5 Dört Çubuk Mekaniması Kuanarak Mikro Hava Aracı İçin Kanat Mekaniması Tasarımı A. İşbitirici * E. Atuğ İTÜ İTÜ İstanbu İstanbu Öet Kuşarın
ASTRONOTİK DERS NOTLARI 2014
 YÖRÜNGE MEKANİĞİ Yöüngeden Hız Hesabı Küçük bi cismin yöüngesi üzeinde veilen hehangi bi noktadaki hızı ve bu hızın doğultusu nedi? Uydu ve çekim etkisinde bulunan cisim (Ye, gezegen, vs) ikili bi sistem
YÖRÜNGE MEKANİĞİ Yöüngeden Hız Hesabı Küçük bi cismin yöüngesi üzeinde veilen hehangi bi noktadaki hızı ve bu hızın doğultusu nedi? Uydu ve çekim etkisinde bulunan cisim (Ye, gezegen, vs) ikili bi sistem
ÇOK ÜRÜNLÜ GERİ DÖNÜŞÜM AĞ TASARIMI İÇİN BİR MATEMATİKSEL MODEL
 Gazi Üniv. Müh. Mim. Fak. Der. Journa of the Facuty of gineering and Architecture of Gazi University it 28 No 1 151-159 2013 Vo 28 No 1 151-159 2013 ÇOK ÜRÜNLÜ GERİ DÖNÜŞÜM AĞ TASARIMI İÇİN BİR MATEMATİKSEL
Gazi Üniv. Müh. Mim. Fak. Der. Journa of the Facuty of gineering and Architecture of Gazi University it 28 No 1 151-159 2013 Vo 28 No 1 151-159 2013 ÇOK ÜRÜNLÜ GERİ DÖNÜŞÜM AĞ TASARIMI İÇİN BİR MATEMATİKSEL
1. MESNET TEPKİSİ VEYA KESİT ZORU TESİR ÇİZGİLERİNİN KUVVET YÖNTEMİ İLE ÇİZİLMESİ
 1. ESNET TEPKİSİ VEYA KESİT ZORU TESİR ÇİZGİLERİNİN KUVVET YÖNTEİ İLE ÇİZİLESİ Yapı sistemerindeki herhangi bir mesnet tepkisinin veya kesit zorunun tesir çizgisinin kuvvet yöntemi ie çiziebimesi için,
1. ESNET TEPKİSİ VEYA KESİT ZORU TESİR ÇİZGİLERİNİN KUVVET YÖNTEİ İLE ÇİZİLESİ Yapı sistemerindeki herhangi bir mesnet tepkisinin veya kesit zorunun tesir çizgisinin kuvvet yöntemi ie çiziebimesi için,
DEPREM ETKİSİNDEKİ KABLOLU KÖPRÜLERİN STOKASTİK SONLU ELEMAN ANALİZİ STOCHASTIC FINITE ELEMENT ANALYSIS OF CABLE STAYED BRIDGES TO EARTHQUAKES
 DEPRE ETİSİNDEİ ABLOLU ÖPRÜLERİN STOASTİ SONLU ELEAN ANALİZİ STOHASTI FINITE ELEENT ANALYSIS OF ABLE STAYED BRIDGES TO EARTHQUAES BAYRATAR A ÇAVDAR Ö. ÇAVDAR A. SOYLU. Posta Adresi: * TÜ Gümüşhane üh.
DEPRE ETİSİNDEİ ABLOLU ÖPRÜLERİN STOASTİ SONLU ELEAN ANALİZİ STOHASTI FINITE ELEENT ANALYSIS OF ABLE STAYED BRIDGES TO EARTHQUAES BAYRATAR A ÇAVDAR Ö. ÇAVDAR A. SOYLU. Posta Adresi: * TÜ Gümüşhane üh.
 5 ÖABT / MTL ORTAÖĞRETİM MATEMATİK ÖĞRETMENLİĞİ TG. 678 ( sin + cos )( sin- cos )( sin+ cos ) lim sin- cos " = lim ( sin+ cos ) = bulunu. ". # # I = sin d = sin sin d sin = u sin d = dv du = sin : cos
5 ÖABT / MTL ORTAÖĞRETİM MATEMATİK ÖĞRETMENLİĞİ TG. 678 ( sin + cos )( sin- cos )( sin+ cos ) lim sin- cos " = lim ( sin+ cos ) = bulunu. ". # # I = sin d = sin sin d sin = u sin d = dv du = sin : cos
3 FAZLI SİSTEMLER. şartlarda daha fazla güç nakli mümkündür. 26.05.2013 3 fazlı sistemler 1 3-FAZLI DENGELİ SİSTEMLER V OR V OS O V OT
 3 FA İEME n Çok azlı sistemle, geilimleinin aasında az akı bulunan iki veya daha azla tek azlı sistemin bileştiilmiş halidi ve bu işlem simetik bi şekilde yapılı. n ek azlı sistemlede güç dalgalı olduğu
3 FA İEME n Çok azlı sistemle, geilimleinin aasında az akı bulunan iki veya daha azla tek azlı sistemin bileştiilmiş halidi ve bu işlem simetik bi şekilde yapılı. n ek azlı sistemlede güç dalgalı olduğu
C) 2 2 2 2H c. D) v = v + 2uv + 2u ; tanθ= C) v 0 =10 3 m/s; tanθ= 2 3
 2 2 2 2H c. D) v = v + 2uv + 2u ; tanθ= C) v 0 =10 3 m/s; tanθ= 2 3") . Bi uça sesten ızı oaa, H yüseiğinde üstüüzden uçaen ta tepeizden geçtiten τ süe sona sesini duyabiiyouz. es ızı c ise uçağın ızını buunuz. H c τ H c τ H c τ H c τ H c τ tenis oeti u o v tenis topu. Kütesi
. Bi uça sesten ızı oaa, H yüseiğinde üstüüzden uçaen ta tepeizden geçtiten τ süe sona sesini duyabiiyouz. es ızı c ise uçağın ızını buunuz. H c τ H c τ H c τ H c τ H c τ tenis oeti u o v tenis topu. Kütesi
- 1 - denklemi ile verilmektedir. ε 0 ve µ 0 ın birimleri hangi şıkta doğru olarak
 - - XXI. ULUSAL FİZİK OLİMPİYATI BİİNİ AŞAMA SINAVI-. Işığın boşuktaki ızı, c, iki tee sabite bağıdı. Buna; boşuğun dieektik sabiti ε e anyetik geçigeniği µ oup, c denkei ie eiektedi. ε e µ ın biiei angi
- - XXI. ULUSAL FİZİK OLİMPİYATI BİİNİ AŞAMA SINAVI-. Işığın boşuktaki ızı, c, iki tee sabite bağıdı. Buna; boşuğun dieektik sabiti ε e anyetik geçigeniği µ oup, c denkei ie eiektedi. ε e µ ın biiei angi
Örnek 1. Çözüm: Örnek 2. Çözüm: 60 30000 300 60 = = = 540
 Önek 1 1.8 kn yük altında 175 dev/dak dönen bi mil yatağında çalışacak bilyeli ulman için, 5 saat ömü ve %9 güvenililik istemekteyiz. Öneğin SKF kataloğundan seçmemiz geeken inamik yük sayısı (C 1 ) nedi?
Önek 1 1.8 kn yük altında 175 dev/dak dönen bi mil yatağında çalışacak bilyeli ulman için, 5 saat ömü ve %9 güvenililik istemekteyiz. Öneğin SKF kataloğundan seçmemiz geeken inamik yük sayısı (C 1 ) nedi?
- 1 - 3 4v A) 450 B) 500 C) 550 D) 600 E) 650
 450 B) 500 C) 550 D) 600 E) 650") - -. Bi cisi uzunutai younu sabit hızı ie at eteye başıyo. Cisi youn yaısını at ettiğinde hızını yaıya düşüüp aan youn yaısını at ettiğinde yine hızını yaıya düşüetedi. Cisi aan youn yaısını gittiğinde
- -. Bi cisi uzunutai younu sabit hızı ie at eteye başıyo. Cisi youn yaısını at ettiğinde hızını yaıya düşüüp aan youn yaısını at ettiğinde yine hızını yaıya düşüetedi. Cisi aan youn yaısını gittiğinde
SENKRON RELÜKTANS MAKİNASININ ANALİZİ
 SENKRON REÜKTANS MAKİNASNN ANAİZİ Esoy BEŞER 1 H.Taık DURU 2 Sai ÇAMUR 3 Biol ARİFOĞU 4 Esa KANDEMİR 5 Elektik Mühendisliği Bölümü Mühendislik Fakültesi Koeli Ünivesitesi, Vezioğlu Kampusü, 411, Koeli
SENKRON REÜKTANS MAKİNASNN ANAİZİ Esoy BEŞER 1 H.Taık DURU 2 Sai ÇAMUR 3 Biol ARİFOĞU 4 Esa KANDEMİR 5 Elektik Mühendisliği Bölümü Mühendislik Fakültesi Koeli Ünivesitesi, Vezioğlu Kampusü, 411, Koeli
2013 2013 LYS LYS MATEMATİK Soruları
 LYS LYS MATEMATİK Soulaı. LYS 5. LYS ( + a ) = 8 < < olmak üzee, olduğuna öe, a kaçtı? I. A) D) II. + III. (.) ifadeleinden hanileinin değei neatifti? A) Yalnız I Yalnız II Yalnız III D) I ve III II ve
LYS LYS MATEMATİK Soulaı. LYS 5. LYS ( + a ) = 8 < < olmak üzee, olduğuna öe, a kaçtı? I. A) D) II. + III. (.) ifadeleinden hanileinin değei neatifti? A) Yalnız I Yalnız II Yalnız III D) I ve III II ve
T.C. TRAKYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ. BİR KOLUN HAREKETLERİNİ TAKİP EDEN DÖRT DÖNEL MAFSALLI ROBOT KOLU TASARIMI ve DENEYSEL ARAŞTIRILMASI
 i .C. RKY ÜNİVERSİESİ FEN İLİMLERİ ENSİÜSÜ İR KOLUN HREKELERİNİ KİP EDEN DÖR DÖNEL MFSLLI ROO KOLU SRIMI ve DENEYSEL RŞIRILMSI Özan ÇEİNKY YÜKSEK LİSNS EZİ MKİN MÜHENDİSLİĞİ N İLİM DLI u tez Oak 9 taihinde
i .C. RKY ÜNİVERSİESİ FEN İLİMLERİ ENSİÜSÜ İR KOLUN HREKELERİNİ KİP EDEN DÖR DÖNEL MFSLLI ROO KOLU SRIMI ve DENEYSEL RŞIRILMSI Özan ÇEİNKY YÜKSEK LİSNS EZİ MKİN MÜHENDİSLİĞİ N İLİM DLI u tez Oak 9 taihinde
SAE 10, 20, 30 ve 40 d = 200 mm l = 100 mm W = 32 kn N = 900 d/dk c = mm T = 70 C = 2. SAE 10 için
 ÖRNEK mm çapında, mm uzunluğundaki bi kaymalı yatakta, muylu 9 d/dk hızla dönmekte ve kn bi adyal yükle zolanmaktadı. Radyal boşluğu. mm alaak SAE,, ve yağlaı için güç kayıplaını hesaplayınız. Çalışma
ÖRNEK mm çapında, mm uzunluğundaki bi kaymalı yatakta, muylu 9 d/dk hızla dönmekte ve kn bi adyal yükle zolanmaktadı. Radyal boşluğu. mm alaak SAE,, ve yağlaı için güç kayıplaını hesaplayınız. Çalışma
sürtünmeli olup buradaki sürtünme katsayısı f= 3
 1 DAİRESEL DİNAİK SRULARI 1. Kütesi oan bi cisi, uzunuğu oan bi ipin ucunda buunatadı. İp düşey esen etaında beii açısa hıza ada döndüüee cisi ada yüseiyo. Bu haeeti sağaa için yapıası eeen iş nedi? 5
1 DAİRESEL DİNAİK SRULARI 1. Kütesi oan bi cisi, uzunuğu oan bi ipin ucunda buunatadı. İp düşey esen etaında beii açısa hıza ada döndüüee cisi ada yüseiyo. Bu haeeti sağaa için yapıası eeen iş nedi? 5
SÖNÜMLÜ SERBEST TİTREŞİMLER
 SÖNÜMLÜ SERBEST TİTREŞİMLER 79 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80 Sönümlü Serbest Titreşim
SÖNÜMLÜ SERBEST TİTREŞİMLER 79 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80 Sönümlü Serbest Titreşim
2) ÇELİK YAPILARDA BİRLEŞİMLER
 ÇELİK YAPILARDA BİRLEŞİMLER") ) ÇELİK YAPILARDA BİRLEŞİMLER Çeik yapıarda kuanıan hadde ürüneri için, aşağıdaki sebepere bireşimer yapıması gerekmektedir. Farkı taşıyıcı eemanarın (koon-koon, koon-kiriş, diyagona-koon, kiriş-kiriş,
) ÇELİK YAPILARDA BİRLEŞİMLER Çeik yapıarda kuanıan hadde ürüneri için, aşağıdaki sebepere bireşimer yapıması gerekmektedir. Farkı taşıyıcı eemanarın (koon-koon, koon-kiriş, diyagona-koon, kiriş-kiriş,
YORULMA ANALİZLERİNDE ARAÇ DİNAMİĞİ MODELLERİNİN KULLANIMI
 OTEKON 2010 5. Otomotiv Teknolojileri Kongresi 07 08 Haziran 2010, BURSA YORULMA ANALİZLERİNDE ARAÇ DİNAMİĞİ MODELLERİNİN KULLANIMI Anıl Yılmaz, Namık Kılıç Otokar Otomotiv ve Savunma Sanayi A.Ş., SAKARYA
OTEKON 2010 5. Otomotiv Teknolojileri Kongresi 07 08 Haziran 2010, BURSA YORULMA ANALİZLERİNDE ARAÇ DİNAMİĞİ MODELLERİNİN KULLANIMI Anıl Yılmaz, Namık Kılıç Otokar Otomotiv ve Savunma Sanayi A.Ş., SAKARYA
Işığın Tanecikli Modeli Atom Fiziği Radyoaktivite Atom Altı Parçacıklar Büyük Patlama ve Evrenin Oluşumu...
 İÇİNDEİER izik Bilimine Giiş... Vektöle... uvvet Denge... 5 Tok... 7 Ağılık ekezi... Basit akinele... 5 Doğusal Haeket... 9 Dinamik... 5 İş Güç Eneji... eyüzünde Haeket... 7 Düzgün Çembesel Haeket... Basit
İÇİNDEİER izik Bilimine Giiş... Vektöle... uvvet Denge... 5 Tok... 7 Ağılık ekezi... Basit akinele... 5 Doğusal Haeket... 9 Dinamik... 5 İş Güç Eneji... eyüzünde Haeket... 7 Düzgün Çembesel Haeket... Basit
LYS 1 / GEOMETRİ DENEME ÇÖZÜMLERİ
 LYS / GMİ NM ÇÖZÜMLİ eneme -. 0 ' 0 ile l eş üçgenle olduğundan; = 0 cm l = 0 cm ve = desek l = olu. l de pisago ise l = cm. 0 @ nin ota noktasını olaak işaetlielim. u duumda, = cm ( de ota taan) = cm
LYS / GMİ NM ÇÖZÜMLİ eneme -. 0 ' 0 ile l eş üçgenle olduğundan; = 0 cm l = 0 cm ve = desek l = olu. l de pisago ise l = cm. 0 @ nin ota noktasını olaak işaetlielim. u duumda, = cm ( de ota taan) = cm
YENİ NESİL ASANSÖRLERİN ENERJİ VERİMLİLİĞİNİN DEĞERLENDİRİLMESİ
 YENİ NESİL ASANSÖRLERİN ENERJİ VERİMLİLİĞİNİN DEĞERLENDİRİLMESİ ÖZET Egün ALKAN Elk.Y.Müh. Buga Otis Asansö Sanayi ve Ticaet A.Ş. Tel:0212 323 44 11 Fax:0212 323 44 66 Balabandee Cad. No:3 34460 İstinye-İstanbul
YENİ NESİL ASANSÖRLERİN ENERJİ VERİMLİLİĞİNİN DEĞERLENDİRİLMESİ ÖZET Egün ALKAN Elk.Y.Müh. Buga Otis Asansö Sanayi ve Ticaet A.Ş. Tel:0212 323 44 11 Fax:0212 323 44 66 Balabandee Cad. No:3 34460 İstinye-İstanbul
MEKANİK TİTREŞİMLER. (Dynamics of Machinery, Farazdak Haideri, 2007)
") MEKANİK TİTREŞİMLER TİTREŞİM ÖLÇÜMÜ: Titeşim ölçümü oldukça kapsamlı bi koudu ve mekaik, elektik ve elektoik bilgisi içeiklidi. Titeşim ölçümleide titeşim geliği (ye değiştime-displacemet, hız-velocity
MEKANİK TİTREŞİMLER TİTREŞİM ÖLÇÜMÜ: Titeşim ölçümü oldukça kapsamlı bi koudu ve mekaik, elektik ve elektoik bilgisi içeiklidi. Titeşim ölçümleide titeşim geliği (ye değiştime-displacemet, hız-velocity
Sunum ve Sistematik 1. ÜNİTE: DÜZLEM GEOMETRİDE TEMEL ELEMANLAR VE İSPAT BİÇİMLERİ
 Sunum ve Sistematik 1. ÜNİTE: DÜZLEM GEMETRİDE TEMEL ELEMNLR VE İSPT İÇİMLERİ KNU ÖZETİ u başık atına, ünitenin en can aıcı bigiei, kazanım sıasına göe en at başıkaa ayıaak hap bigi niteiğine konu özeti
Sunum ve Sistematik 1. ÜNİTE: DÜZLEM GEMETRİDE TEMEL ELEMNLR VE İSPT İÇİMLERİ KNU ÖZETİ u başık atına, ünitenin en can aıcı bigiei, kazanım sıasına göe en at başıkaa ayıaak hap bigi niteiğine konu özeti
Yazanlar : w c. Ekran modülasyonlu C sınıfı bir RF yükseltici Şekil : l de gösterilmiştir. Şekil : l deki anod
 UDK : 621.396.019 Düşük Güçü Vericierde Ekran Moiasyonunun Uyguanası ve Anod Modiiasyonu ie Ekonoik Mukayesesi Yazanar : Dr. Mustafa N. PARLAR (*) Atunkan HIZAL (**) Kuanıan Seboer : W nn w c ** i f E.V
UDK : 621.396.019 Düşük Güçü Vericierde Ekran Moiasyonunun Uyguanası ve Anod Modiiasyonu ie Ekonoik Mukayesesi Yazanar : Dr. Mustafa N. PARLAR (*) Atunkan HIZAL (**) Kuanıan Seboer : W nn w c ** i f E.V
ÜNİTE: KUVVET VE HAREKETİN BULUŞMASI - ENERJİ KONU: Evrende Her Şey Hareketlidir
 ÜNTE: UET E HAREETN BUUŞMASI - ENERJ NU: Evende He Şey Haeketlidi ÖRNE SRUAR E ÇÖZÜMER. x M +x Bi adam önce noktasından noktasına daha sona ise noktasından M (m) 3 3 (m) noktasına geldiğine göe adamın
ÜNTE: UET E HAREETN BUUŞMASI - ENERJ NU: Evende He Şey Haeketlidi ÖRNE SRUAR E ÇÖZÜMER. x M +x Bi adam önce noktasından noktasına daha sona ise noktasından M (m) 3 3 (m) noktasına geldiğine göe adamın
BÖLÜM ÇİFTLENİMLİ SALINICILAR (Coupled Oscillators)
") BÖLÜM-5 5.1 ÇİFTLENİMLİ SALINICILAR (Couped Osciators) Bundan önceki böümerde tek bir doğa frekansa sahip sistemeri inceedik. Bu böümde birçok farkı frekansarda titreşebien sistemeri inceeyeceğiz. Önce
BÖLÜM-5 5.1 ÇİFTLENİMLİ SALINICILAR (Couped Osciators) Bundan önceki böümerde tek bir doğa frekansa sahip sistemeri inceedik. Bu böümde birçok farkı frekansarda titreşebien sistemeri inceeyeceğiz. Önce
BASAMAK TİPİ DEVRE YAPISI İLE ALÇAK GEÇİREN FİLTRE TASARIMI
 BASAMAK TİPİ DEVRE YAPISI İE AÇAK GEÇİREN FİTRE TASARIMI Adnan SAVUN 1 Tugut AAR Aif DOMA 3 1,,3 KOÜ Mühendislik Fakültesi, Elektonik ve abeleşme Müh. Bölümü 41100 Kocaeli 1 e-posta: adnansavun@hotmail.com
BASAMAK TİPİ DEVRE YAPISI İE AÇAK GEÇİREN FİTRE TASARIMI Adnan SAVUN 1 Tugut AAR Aif DOMA 3 1,,3 KOÜ Mühendislik Fakültesi, Elektonik ve abeleşme Müh. Bölümü 41100 Kocaeli 1 e-posta: adnansavun@hotmail.com
UYGULAMALAR ÇIKIŞ OLSAYDI!!
 UYGULAMALAR ( Duruş Görüş Uzunuğu, Fren Eniyet Meaei, Stopping Sight Ditance ) PROBLEM: 90 k/a' ik hıza uygun, % 3 eğii bir yo üzerinde tairat (onarı) ebebiye işaret ( uyarı) evhaı konuacaktır. Bu evha
UYGULAMALAR ( Duruş Görüş Uzunuğu, Fren Eniyet Meaei, Stopping Sight Ditance ) PROBLEM: 90 k/a' ik hıza uygun, % 3 eğii bir yo üzerinde tairat (onarı) ebebiye işaret ( uyarı) evhaı konuacaktır. Bu evha
Çembersel Hareket. Test 1 in Çözümleri
 7 Çebesel Haeket est in Çözülei. 3 3. düşey eksen yatay tabla yatay He üç cisi aynı ipe bağlı olduğundan peiyotlaı eşitti. Açısal hız bağıntısı; ~ di. Bağıntısındaki sabit bi değedi. Ayıca cisilein peiyotlaı
7 Çebesel Haeket est in Çözülei. 3 3. düşey eksen yatay tabla yatay He üç cisi aynı ipe bağlı olduğundan peiyotlaı eşitti. Açısal hız bağıntısı; ~ di. Bağıntısındaki sabit bi değedi. Ayıca cisilein peiyotlaı
Kütle Çekimi ve Kepler Kanunları. Test 1 in Çözümleri
 7 Kütle Çekii e Keple Kanunlaı est in Çözülei. Uydu Dünya nın ekezinden kada uzaklıktaki yöüngesinde peiyodu ile dolanıken iki kütle aasındaki çeki kueti, ekezcil kuet göei göü. F çeki F ekezcil G Bağıntıya
7 Kütle Çekii e Keple Kanunlaı est in Çözülei. Uydu Dünya nın ekezinden kada uzaklıktaki yöüngesinde peiyodu ile dolanıken iki kütle aasındaki çeki kueti, ekezcil kuet göei göü. F çeki F ekezcil G Bağıntıya
BTZ Kara Deliği ve Grafen
 BTZ Kaa Deliği ve Gafen Ankaa YEF Günlei 015 1-14 Şubat 015, ODTÜ Ümit Etem ve B. S. Kandemi BTZ Kaa Deliği Gafen ve Eği Uzay-zamanla Beltami Tompeti ve Diac Hamiltonyeni Eneji Değelei ve Gafen Paametelei
BTZ Kaa Deliği ve Gafen Ankaa YEF Günlei 015 1-14 Şubat 015, ODTÜ Ümit Etem ve B. S. Kandemi BTZ Kaa Deliği Gafen ve Eği Uzay-zamanla Beltami Tompeti ve Diac Hamiltonyeni Eneji Değelei ve Gafen Paametelei
Alsancakıizmir/TÜRKiYE Tel :+90(232)464 30 40 (PBX) Fax:+90(232)464 39 19. Web site : http://www.hlbsaygin.com.lre-posta:mailbox@hlbsaygin.com.
464 30 40 (PBX) Fax:+90(232)464 39 19. Web site : http://www.hlbsaygin.com.lre-posta:mailbox@hlbsaygin.com.") ID!B Saygın Yemini Mai Müşavirik ve Bağımsız Denetim A.Ş. Rapor N : SYMM 116/1795-184 BÜYÜME AMAÇLI HİsSE SENEDİ EMEKLİLİK YATIRIM FONU'NUN YATIRIM PERFORMANSI KONUSUNDA KAMUYA AÇIKLANAN BİLGİLERE İLİşKİN
ID!B Saygın Yemini Mai Müşavirik ve Bağımsız Denetim A.Ş. Rapor N : SYMM 116/1795-184 BÜYÜME AMAÇLI HİsSE SENEDİ EMEKLİLİK YATIRIM FONU'NUN YATIRIM PERFORMANSI KONUSUNDA KAMUYA AÇIKLANAN BİLGİLERE İLİşKİN
Bölüm 6: Newton un Hareket Yasalarının Uygulamaları:
 (Kimya Bölümü A Gubu 17.11.016) Bölüm 6: Newton un Haeket Yasalaının Uygulamalaı: 1. Bazı Sabit Kuetle 1.1. Yeçekimi 1.. Geilme 1.3. Nomal Kuet. Newton un I. Yasasının Uygulamalaı: Dengedeki Paçacıkla
(Kimya Bölümü A Gubu 17.11.016) Bölüm 6: Newton un Haeket Yasalaının Uygulamalaı: 1. Bazı Sabit Kuetle 1.1. Yeçekimi 1.. Geilme 1.3. Nomal Kuet. Newton un I. Yasasının Uygulamalaı: Dengedeki Paçacıkla
Değerlerin Önemi. W L = ILI«O ve W C = CE 2 0. W = f pdt R W t = j,*,, l öt. 2 l. i (o) -e (o) (la) (lb) (Ic)
 -e (o) (la) (lb) (Ic)") UDK: 61.39 Devre Anaizinde Başangıç Şartan ve Nihaî özet: Devre anaizinde esas probem, Ohm ve Kirchhoff kanunarından faydaanarak, întegre - diferansiye denkemer diye adandırıan denge denkemerini ede etmek
UDK: 61.39 Devre Anaizinde Başangıç Şartan ve Nihaî özet: Devre anaizinde esas probem, Ohm ve Kirchhoff kanunarından faydaanarak, întegre - diferansiye denkemer diye adandırıan denge denkemerini ede etmek
TEST 29-1 KONU ATOM MODELLERİ. Çözümlerİ ÇÖZÜMLERİ
 KOU 9 TOM MOLLR Çözüme TST 9- ÇÖÜMLR. 3 e çıka eekto 3 te ye iese Bame Ha, 3 te e ieke Lyma b ya da de e ieke Lyma a şıması yapa. 6. Hidojei. uyaıma eejisi 0, ev oduğuda L idojei uyaıyo ise eekto osaydı
KOU 9 TOM MOLLR Çözüme TST 9- ÇÖÜMLR. 3 e çıka eekto 3 te ye iese Bame Ha, 3 te e ieke Lyma b ya da de e ieke Lyma a şıması yapa. 6. Hidojei. uyaıma eejisi 0, ev oduğuda L idojei uyaıyo ise eekto osaydı
Elastik zemin üzerindeki çubuk uygulamalarının serbest ve nonlineer titreşim analizi
 itüdergisi/d mühendisik Cit:4, Sayı:4, 5-6 Ağustos 5 Eastik üzerindeki uyguamaarının serbest ve nonineer titreşim anaizi Ai BAHÇIVAN *, Vedat KARADAĞ İTÜ Makina Fakütesi, Makina Mühendisiği Böümü, Gümüşsuyu,
itüdergisi/d mühendisik Cit:4, Sayı:4, 5-6 Ağustos 5 Eastik üzerindeki uyguamaarının serbest ve nonineer titreşim anaizi Ai BAHÇIVAN *, Vedat KARADAĞ İTÜ Makina Fakütesi, Makina Mühendisiği Böümü, Gümüşsuyu,
Titreşim_1 ITAP FOO: 04 Mart 2014 Olimpiyat Konu Sınavı
 Titreşi_ ITAP FOO: art Oipiyat Konu Sınavı. Şeidei esne, hafif ütei tahtanın ucunda buunan sporcu ağırına tahtanın ucunun yerine aşağı doğru h.5 adar değiştiriyor. Tahtanın dene onuuna öre titreşi periyotunu
Titreşi_ ITAP FOO: art Oipiyat Konu Sınavı. Şeidei esne, hafif ütei tahtanın ucunda buunan sporcu ağırına tahtanın ucunun yerine aşağı doğru h.5 adar değiştiriyor. Tahtanın dene onuuna öre titreşi periyotunu
Basit Makineler. Test 1 in Çözümleri
 Basit Makinele BASİ MAİNELER est in Çözümlei. Şekil üzeindeki bilgilee göe dinamomete değeini göstei. Cevap D di.. Makaa ve palanga sistemleinde kuvvetten kazanç sayısı kada yoldan kayıp vadı. uvvet kazancı
Basit Makinele BASİ MAİNELER est in Çözümlei. Şekil üzeindeki bilgilee göe dinamomete değeini göstei. Cevap D di.. Makaa ve palanga sistemleinde kuvvetten kazanç sayısı kada yoldan kayıp vadı. uvvet kazancı
DÜŞEY HALKASAL BİR BORUDA SALINIMLI AKIŞTA ISI GEÇİŞİNİN DENEYSEL İNCELENMESİ
 Isı Biimi ve Tekniği Dergisi, 8,, 6-66, 8 J. of Therma Science and Technoogy 8 TIBTD Printed in Turkey ISSN 3-365 DÜŞEY HALKASAL BİR BORUDA SALINIMLI AKIŞTA ISI GEÇİŞİNİN DENEYSEL İNCELENMESİ Üna AKDAĞ
Isı Biimi ve Tekniği Dergisi, 8,, 6-66, 8 J. of Therma Science and Technoogy 8 TIBTD Printed in Turkey ISSN 3-365 DÜŞEY HALKASAL BİR BORUDA SALINIMLI AKIŞTA ISI GEÇİŞİNİN DENEYSEL İNCELENMESİ Üna AKDAĞ
2013 SBS (ORTAÖĞRETİME GEÇİŞTE TEK SINAV YENİ SİSTEM)
") 2013 SBS (ORTAÖĞRETİME GEÇİŞTE TEK SINAV YENİ SİSTEM) (Şubat 2011-2641 Miî Eğitim Bakanığı Tebiğer Dergisi 113 Değişikikeri ie) 2012-2013 öğretim yıından itibaren 8. sınıfta uyguanacak oan yeni sistemde
2013 SBS (ORTAÖĞRETİME GEÇİŞTE TEK SINAV YENİ SİSTEM) (Şubat 2011-2641 Miî Eğitim Bakanığı Tebiğer Dergisi 113 Değişikikeri ie) 2012-2013 öğretim yıından itibaren 8. sınıfta uyguanacak oan yeni sistemde
KOMPAKT ISI EŞANJÖRLERİNDE KANATÇIK DÜZENLEMELERİNİN BASINÇ KAYBINA ETKİSİ
 PAMUKKAE ÜNİVERSİTESİ MÜHENDİ SİK FAKÜTESİ PAMUKKAE UNIVERSITY ENGINEERING COEGE MÜHENDİSİK BİİMERİ DERGİSİ JOURNA OF ENGINEERING SCIENCES YI CİT SAYI SAYFA : : 8 : : 7-3 KOMPAKT ISI EŞANJÖRERİNDE KANATÇIK
PAMUKKAE ÜNİVERSİTESİ MÜHENDİ SİK FAKÜTESİ PAMUKKAE UNIVERSITY ENGINEERING COEGE MÜHENDİSİK BİİMERİ DERGİSİ JOURNA OF ENGINEERING SCIENCES YI CİT SAYI SAYFA : : 8 : : 7-3 KOMPAKT ISI EŞANJÖRERİNDE KANATÇIK
Gauss Kanunu. Gauss kanunu:tanım. Kapalı bir yüzey boyunca toplam elektrik akısı, net elektrik yükünün e 0 a bölümüne eşittir.
 Gauss Kanunu Gauss kanunu:tanım Kapalı bi yüzey boyunca toplam elektik akısı, net elektik yükünün e a bölümüne eşitti. yüzeydeki Gauss kanunu Coulomb kanununa eşdeğedi. Gauss kanunu : Tanım Bi yük dağılımını
Gauss Kanunu Gauss kanunu:tanım Kapalı bi yüzey boyunca toplam elektik akısı, net elektik yükünün e a bölümüne eşitti. yüzeydeki Gauss kanunu Coulomb kanununa eşdeğedi. Gauss kanunu : Tanım Bi yük dağılımını
DEPREM ETKİSİ ALTINDAKİ YAPILAR İÇİN İNDİRGENMİŞ MODELLEME YÖNTEMİ
 Atıncı Uusa Depre Mühendisiği Konferansı, 16-20 Eki 2007, İstanbu Sixth Nationa Conference on Earthquake Engineering, 16-20 October 2007, Istanbu, Turkey DEPREM ETKİSİ ALTINDAKİ YAPILAR İÇİN İNDİRGENMİŞ
Atıncı Uusa Depre Mühendisiği Konferansı, 16-20 Eki 2007, İstanbu Sixth Nationa Conference on Earthquake Engineering, 16-20 October 2007, Istanbu, Turkey DEPREM ETKİSİ ALTINDAKİ YAPILAR İÇİN İNDİRGENMİŞ
11 SINIF MATEMATİK. Trigonometri Doğrunun Analitik İncelenmesi
 11 SINIF MATEMATİK Tigonometi Doğunun Analitik İncelenmesi 1 YAYIN KOORDİNATÖRÜ Oğuz GÜMÜŞ EDİTÖR Hazal ÖZNAR - Uğucan AYDIN DİZGİ Muhammed KARATAŞ SAYFA TASARIM - KAPAK F. Özgü OFLAZ Eğe bi gün sözleim
11 SINIF MATEMATİK Tigonometi Doğunun Analitik İncelenmesi 1 YAYIN KOORDİNATÖRÜ Oğuz GÜMÜŞ EDİTÖR Hazal ÖZNAR - Uğucan AYDIN DİZGİ Muhammed KARATAŞ SAYFA TASARIM - KAPAK F. Özgü OFLAZ Eğe bi gün sözleim
INVESTIGATION OF VARIATION OF SURFACE WATER QUALITY PARAMETERS IN WESTERN BLACK SEA BASIN AND CLASSIFICATION OF STATIONS USING CLUSTER ANALYSIS
 5. Uusararası İeri Teknoojier Sempozyumu (IATS 09), 1315 Mayıs 2009, Karabük, Türkiye BATI KARADENİZ SULARI HAVZASINDAKİ YÜZEY SUYU KALİTESİ PARAMETRELERİNDEKİ DEĞİŞİMİN İNCELENMESİ VE CLUSTER ANALİZİ
5. Uusararası İeri Teknoojier Sempozyumu (IATS 09), 1315 Mayıs 2009, Karabük, Türkiye BATI KARADENİZ SULARI HAVZASINDAKİ YÜZEY SUYU KALİTESİ PARAMETRELERİNDEKİ DEĞİŞİMİN İNCELENMESİ VE CLUSTER ANALİZİ
F 1 = 4. Yanıt B dir. Nihat Bilgin Yayıncılık = 1 2 P 3, = P, P F 4 F 4 2F 5 3, = P, kuvveti en küçüktür. a = 3
 Basit Makinele Test in Çözümlei. aldıaçlada sistem dengede ise; uvvet x uvvet kolu Yük x Yük kolu. z bağıntısı geçelidi. y 5 5 x y z İpteki geilme kuvvetlei Bijon anataında kuvvet kolu y di. Bu nedenle
Basit Makinele Test in Çözümlei. aldıaçlada sistem dengede ise; uvvet x uvvet kolu Yük x Yük kolu. z bağıntısı geçelidi. y 5 5 x y z İpteki geilme kuvvetlei Bijon anataında kuvvet kolu y di. Bu nedenle
Bağlaşımlı-Kanallar ve Stokastik Yöntemlerle Çekirdek Kaynaşma Reaksiyonları. Bülent Yılmaz. Ankara Üniversitesi
 Bağlaşımlı-Kanalla ve Stokastik Yöntemlele Çekidek Kaynaşma Reaksiyonlaı Bülent Yılmaz Ankaa Ünivesitesi Summe School VI on Nuclea Collective Dynamics, Yıldız Tech. Uni., İstanbul, 4-30 June 01 diekt (doğudan)
Bağlaşımlı-Kanalla ve Stokastik Yöntemlele Çekidek Kaynaşma Reaksiyonlaı Bülent Yılmaz Ankaa Ünivesitesi Summe School VI on Nuclea Collective Dynamics, Yıldız Tech. Uni., İstanbul, 4-30 June 01 diekt (doğudan)
2 0 1 6 / 1. D Ö N E M
 MALİ MÜŞAVİRLİK YETERLİLİK SINAVI HAZIRLIK KURSLARI YENİLENEN KURSLARIMIZIN AVANTAJLARINDANYARARLANIN bizime uaşın KURS YERLERİ Şişi (Gayrettepe, Dedeman İş Merkezi) Kadıköy (Hasanpaşa Mh.) Şirinever Eğitim
MALİ MÜŞAVİRLİK YETERLİLİK SINAVI HAZIRLIK KURSLARI YENİLENEN KURSLARIMIZIN AVANTAJLARINDANYARARLANIN bizime uaşın KURS YERLERİ Şişi (Gayrettepe, Dedeman İş Merkezi) Kadıköy (Hasanpaşa Mh.) Şirinever Eğitim
ALTERNATİF AKIM BÖLÜM 6. Alıştırmalar. Alternatif Akım ÇÖZÜMLER i m. Akım denkleminde t = s yazarsak akımın. anlık değeri, i = i m
 ALTERNATİF AKIM BÖLÜM 6 Alıştıala ÇÖZÜMLER Altenatif Akı f 80. i 4 A R 0 i i.sinwt i.sinπ.f.t 4v.sinπ.50.t 4v.sin00πt. Akıın zaanla değişi denkleinden, i(t) i.sinft i.sin.50. 400 i.sin 4 i. i v A Geiliin
ALTERNATİF AKIM BÖLÜM 6 Alıştıala ÇÖZÜMLER Altenatif Akı f 80. i 4 A R 0 i i.sinwt i.sinπ.f.t 4v.sinπ.50.t 4v.sin00πt. Akıın zaanla değişi denkleinden, i(t) i.sinft i.sin.50. 400 i.sin 4 i. i v A Geiliin
Cevap C. 400 / 0 ( mod 8 ) A harfi. 500 / 4 ( mod 8 ) D harfi. Cevap C. 6. I. n tam sayı ise. n 2 = 4k 2 4k + 1 veya n 2 = 4k 2
 A harfi. 500 / 4 ( mod 8 ) D harfi. Cevap C. 6. I. n tam sayı ise. n 2 = 4k 2 4k + 1 veya n 2 = 4k 2") MTMTİ NMSİ. 8 h + + h. ( a, b ) 0 h. + h h+ h h. + h + bulunu. 0... 7 sayısında asal çapanladan bie tane olduğundan pozitif bölen sayısı kada ( a, b ) sıalı ikilisi vadı. ( + ). ( + ). ( + ). ( + ) tane
MTMTİ NMSİ. 8 h + + h. ( a, b ) 0 h. + h h+ h h. + h + bulunu. 0... 7 sayısında asal çapanladan bie tane olduğundan pozitif bölen sayısı kada ( a, b ) sıalı ikilisi vadı. ( + ). ( + ). ( + ). ( + ) tane
VIII ) E-M DALGA OLUŞUMU
 E-M DALGA OLUŞUMU") 94 VIII ) E-M DALGA OLUŞUMU A. HELMHOLTZ DENKLEMİNE GEÇİŞ B. F k : YAPI ÇARPANI 4-VEKTÖRÜ C. RADYASYON ALANLARI D. ELEKTRİK DİPOL RADYASYONU E. MAGNETİK DİPOL RADYASYONU 95 A) HELMHOLTZ DENKLEMİNE GEÇİŞ
94 VIII ) E-M DALGA OLUŞUMU A. HELMHOLTZ DENKLEMİNE GEÇİŞ B. F k : YAPI ÇARPANI 4-VEKTÖRÜ C. RADYASYON ALANLARI D. ELEKTRİK DİPOL RADYASYONU E. MAGNETİK DİPOL RADYASYONU 95 A) HELMHOLTZ DENKLEMİNE GEÇİŞ
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
TEST 1 ÇÖZÜMLER BASİT MAKİNELER
 ES ÇÖÜER BASİ AİNEER. ( ) Sis tem den ge de ol du ğu na gö e, nok ta sı na gö e tok alı sak; ( ). 4 +.. +. 8 4 + 4 0 4 olu. CEVA A yi de ğiş ti me den eşit li ği sağ la mak için, a kü çül tül meli di.
ES ÇÖÜER BASİ AİNEER. ( ) Sis tem den ge de ol du ğu na gö e, nok ta sı na gö e tok alı sak; ( ). 4 +.. +. 8 4 + 4 0 4 olu. CEVA A yi de ğiş ti me den eşit li ği sağ la mak için, a kü çül tül meli di.
Çembersel Hareket. Test 1 in Çözümleri
 5 Çebesel Haeket est in Çözülei.. düşey eksen tabla He üç cisi aynı ipe bağlı olduğundan peiyotlaı eşitti. Açısal hız bağıntısı; ~ di. Bağıntısındaki sabit bi değedi. Ayıca cisilein peiyotlaı eşitti. hâlde
5 Çebesel Haeket est in Çözülei.. düşey eksen tabla He üç cisi aynı ipe bağlı olduğundan peiyotlaı eşitti. Açısal hız bağıntısı; ~ di. Bağıntısındaki sabit bi değedi. Ayıca cisilein peiyotlaı eşitti. hâlde
- 1 - ULUSAL FİZİK OLİMPİYATI ÜÇÜNCÜ AŞAMA SINAVI Kütlesi m ve yarıçapı R olan homojen bir küre eğim açısı olan m
 - 1 - ULUSAL FİZİK OLİMPİYATI ÜÇÜNCÜ AŞAMA SINAVI -1991 1. Kütlesi m ve yaıçapı R olan homojen bi küe eğim açısı olan m g eğik bi düzlem üzeinde, eğik düzlemin tabanına göe h yüksekliğinde bulunmaktadı.
- 1 - ULUSAL FİZİK OLİMPİYATI ÜÇÜNCÜ AŞAMA SINAVI -1991 1. Kütlesi m ve yaıçapı R olan homojen bi küe eğim açısı olan m g eğik bi düzlem üzeinde, eğik düzlemin tabanına göe h yüksekliğinde bulunmaktadı.
A A A A A A A A A A A
 LYS MATEMATİK TESTİ. Bu testte 5 sou vadı.. Cevaplaınızı, cevap kâğıdının Matematik Testi için aılan kısmına işaetleiniz.. Veilen, ve z tamsaılaı için. =. z =. =f() olduğuna göe, + + z toplamı en çok kaçtı?
LYS MATEMATİK TESTİ. Bu testte 5 sou vadı.. Cevaplaınızı, cevap kâğıdının Matematik Testi için aılan kısmına işaetleiniz.. Veilen, ve z tamsaılaı için. =. z =. =f() olduğuna göe, + + z toplamı en çok kaçtı?
5. Açısal momentum korunduğu için eşit zaman aralıklarında. 6. Uydular eşit periyotta dönüyor ise yörünge yarıçapları CEVAP: D.
 KOU 5 VSL ÇK SS Çözüle. S 5- ÇÖÜL 5. çısal oentu kounduğu için eşit zaan aalıklaında eşit açı taala. L v CVP: C liptik öüngede dönen udua etki eden çeki kuvveti h z vektöüne dik de ildi. Bundan dola çeki
KOU 5 VSL ÇK SS Çözüle. S 5- ÇÖÜL 5. çısal oentu kounduğu için eşit zaan aalıklaında eşit açı taala. L v CVP: C liptik öüngede dönen udua etki eden çeki kuvveti h z vektöüne dik de ildi. Bundan dola çeki
Arama Kurtarma Faaliyetlerinde Optimal Takım Dağıtımının Sağlanması İçin 3 Boyutlu Yüzeylere Genetik Algoritma Yönteminin Uygulanması
 Karaemas Fen ve Müh. Derg. 7(2):577-585, 2017 Karaemas Fen ve Mühendisik Dergisi Dergi web sayfası: http://fbd.beun.edu.tr Araştırma Makaesi Geiş tarihi / Received : 19.12.2016 Kabu tarihi / Accepted :
Karaemas Fen ve Müh. Derg. 7(2):577-585, 2017 Karaemas Fen ve Mühendisik Dergisi Dergi web sayfası: http://fbd.beun.edu.tr Araştırma Makaesi Geiş tarihi / Received : 19.12.2016 Kabu tarihi / Accepted :
Bölüm 5 Manyetizma. Prof. Dr. Bahadır BOYACIOĞLU
 ölüm 5 Manyetizma Pof. D. ahadı OYACOĞLU Manyetizma Manyetik Alanın Tanımı Akım Taşıyan İletkene Etkiyen Kuvvet Düzgün Manyetik Alandaki Akım İlmeğine etkiyen Tok Yüklü bi Paçacığın Manyetik Alan içeisindeki
ölüm 5 Manyetizma Pof. D. ahadı OYACOĞLU Manyetizma Manyetik Alanın Tanımı Akım Taşıyan İletkene Etkiyen Kuvvet Düzgün Manyetik Alandaki Akım İlmeğine etkiyen Tok Yüklü bi Paçacığın Manyetik Alan içeisindeki
SERBEST UZAY OPTİK HABERLEŞMESİNDE GENEL HÜZME MODELİNİN OPTİMİZASYONU VE ATMOSFERİK GÜÇLÜ TÜRBÜLANS KANAL İÇİN BİLGİ HATA OLASILIĞININ İRDELENMESİ
 SERBEST UZAY OPTİK HABERLEŞMESİNDE GENEL HÜZME MODELİNİN OPTİMİZASYONU E ATMOSFERİK GÜÇLÜ TÜRBÜLANS KANAL İÇİN BİLGİ HATA OLASILIĞININ İRDELENMESİ HAMZA GERÇEKCİOĞLU DOKTORA TEZİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ
SERBEST UZAY OPTİK HABERLEŞMESİNDE GENEL HÜZME MODELİNİN OPTİMİZASYONU E ATMOSFERİK GÜÇLÜ TÜRBÜLANS KANAL İÇİN BİLGİ HATA OLASILIĞININ İRDELENMESİ HAMZA GERÇEKCİOĞLU DOKTORA TEZİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ
3. EŞPOTANSİYEL VE ELEKTRİK ALAN ÇİZGİLERİ AMAÇ. Bir çift elektrot tarafından oluşturulan elektrik alan ve eş potansiyel çizgilerini görmek.
 3. EŞPOTNSİYEL VE ELEKTRİK LN ÇİZGİLERİ MÇ i çift elektot taafından oluştuulan elektik alan ve eş potansiyel çizgileini gömek. RÇLR Güç kaynağı Galvanomete Elektot (iki adet) Pob (iki adet) İletken sıvı
3. EŞPOTNSİYEL VE ELEKTRİK LN ÇİZGİLERİ MÇ i çift elektot taafından oluştuulan elektik alan ve eş potansiyel çizgileini gömek. RÇLR Güç kaynağı Galvanomete Elektot (iki adet) Pob (iki adet) İletken sıvı